
A Novel Trajectory Adjustment Mechanism-Based Prescribed Performance Tracking Control for Electro-Hydraulic Systems Subject to Disturbances and Modeling Uncertainties



Abstract
:1. Introduction
- A novel trajectory adjustment mechanism-based active disturbance compensation control framework with prescribed tracking performance is introduced to achieve a high-accuracy tracking performance for an EHS subject to disturbances, model uncertainties, and both kinematic and dynamic constraints.
- Compared to the conventional ESO [44,52], with the same observer bandwidth, an ESMO is developed for to estimate the angular velocity more accurately and better react against unknown fast-changing external loads in the mechanical system. In addition, a new disturbance rejection mechanism in which a LESO and an ESMO are combined to obtain a better estimation performance. Accordingly, a higher precision tracking capability is achieved.
- As a corrective version of an approach in [34], for the first time, the PPF and CF approaches are successfully coordinated in the backstepping framework for EHSs to not only efficiently reduce the computational burden and avoid the “explosion of complexity” but also guarantee the prescribed tracking performance.
- The stability of the closed-loop system is rigorously demonstrated using the Lyapunov theory. The superiority of the suggested method is convincingly validated through comparative numerical simulation results in MATLAB/Simulink environment.
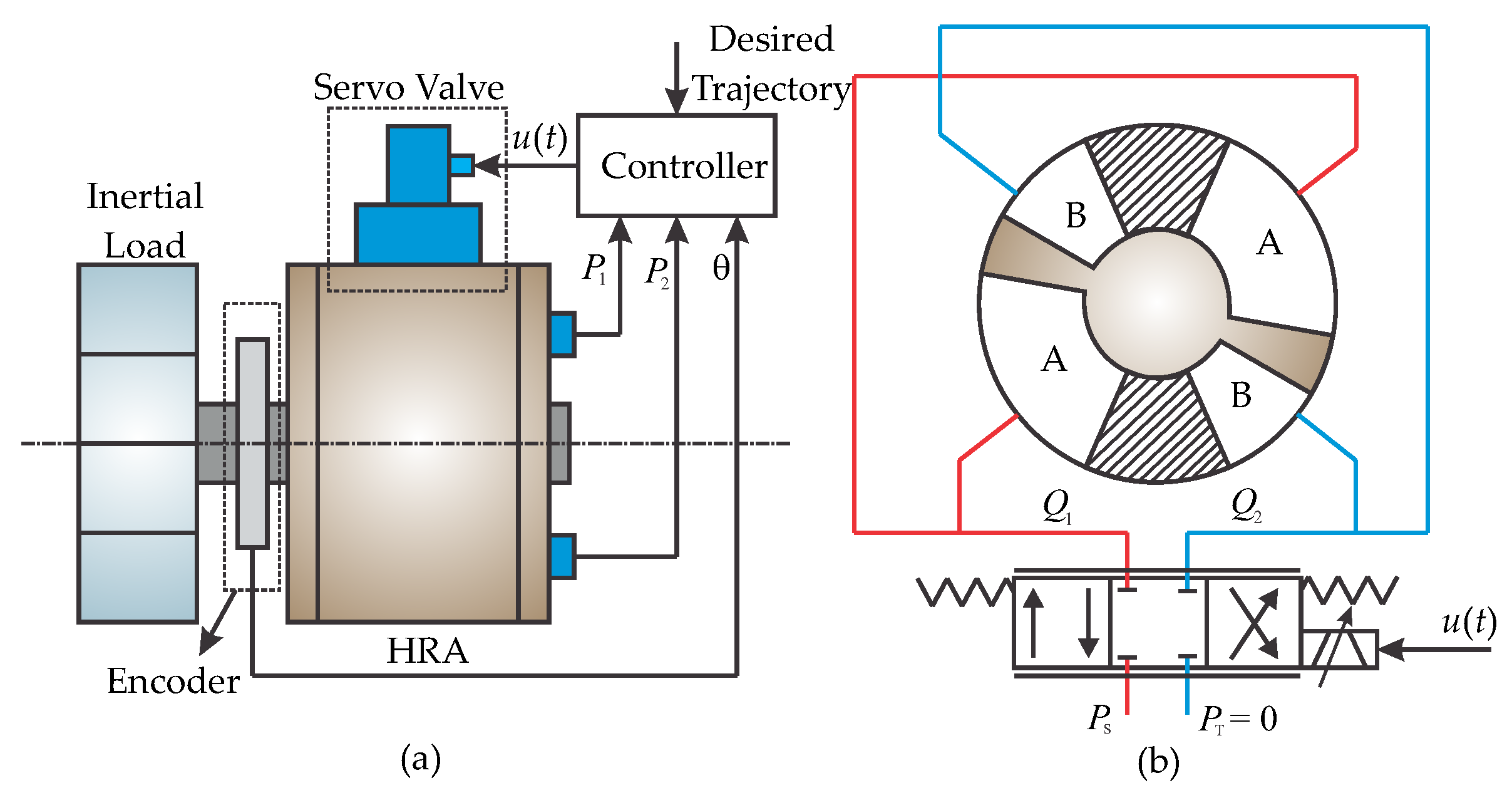
2. System Modeling and Problem Placement
2.1. System Modeling
2.2. Problem Statement
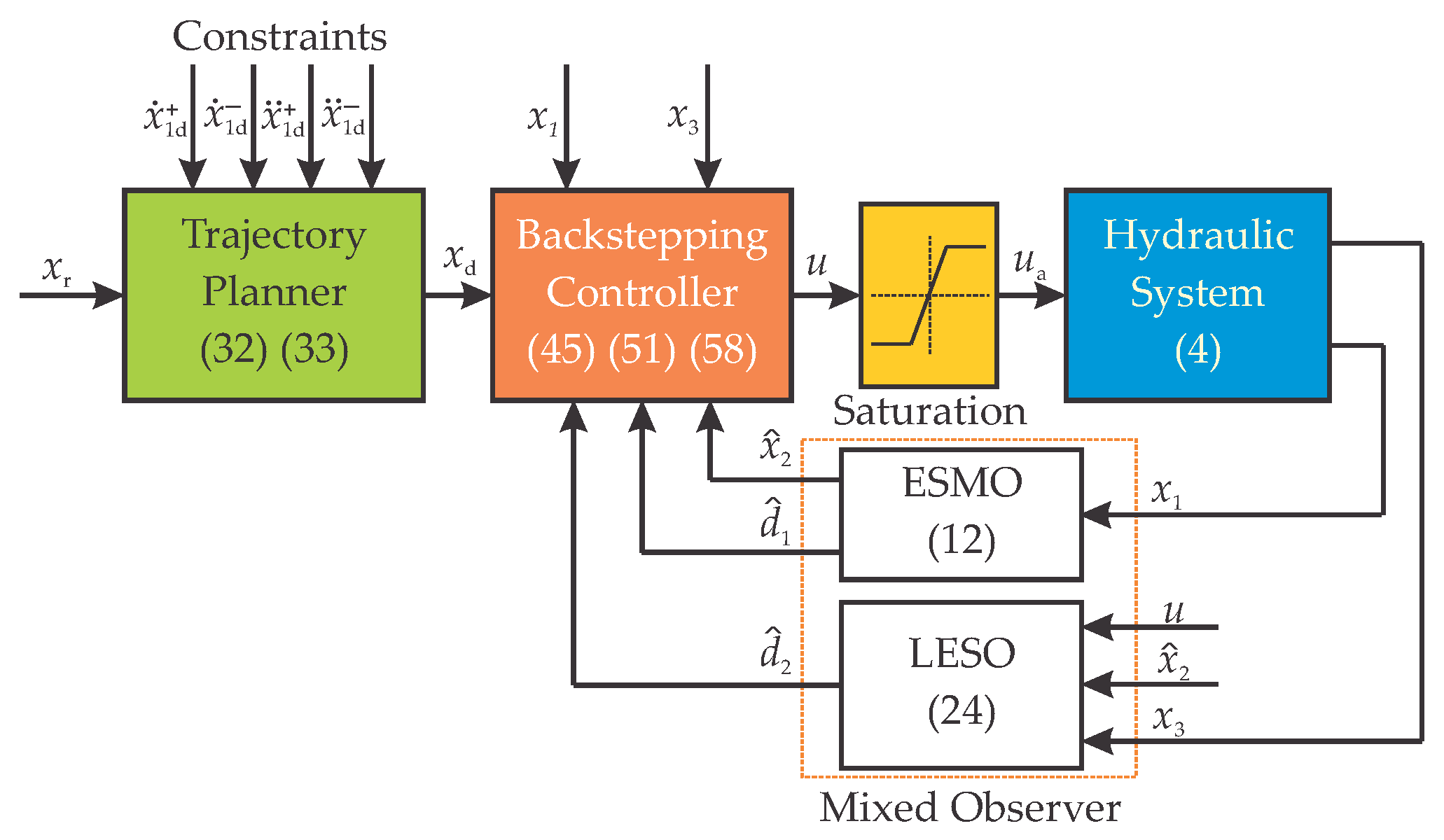
3. Active Disturbance Rejection Control Design
3.1. Observer Design
3.1.1. Extended Sliding Mode Observer Design
3.1.2. Matched Disturbance Observer Design
3.2. Trajectory Planner Design
3.3. Controller Design with Prescribed Tracking Performance
- (1)
- (2)
- and
4. Numerical Simulation and Discussion
4.1. Simulation Setup
- (1)
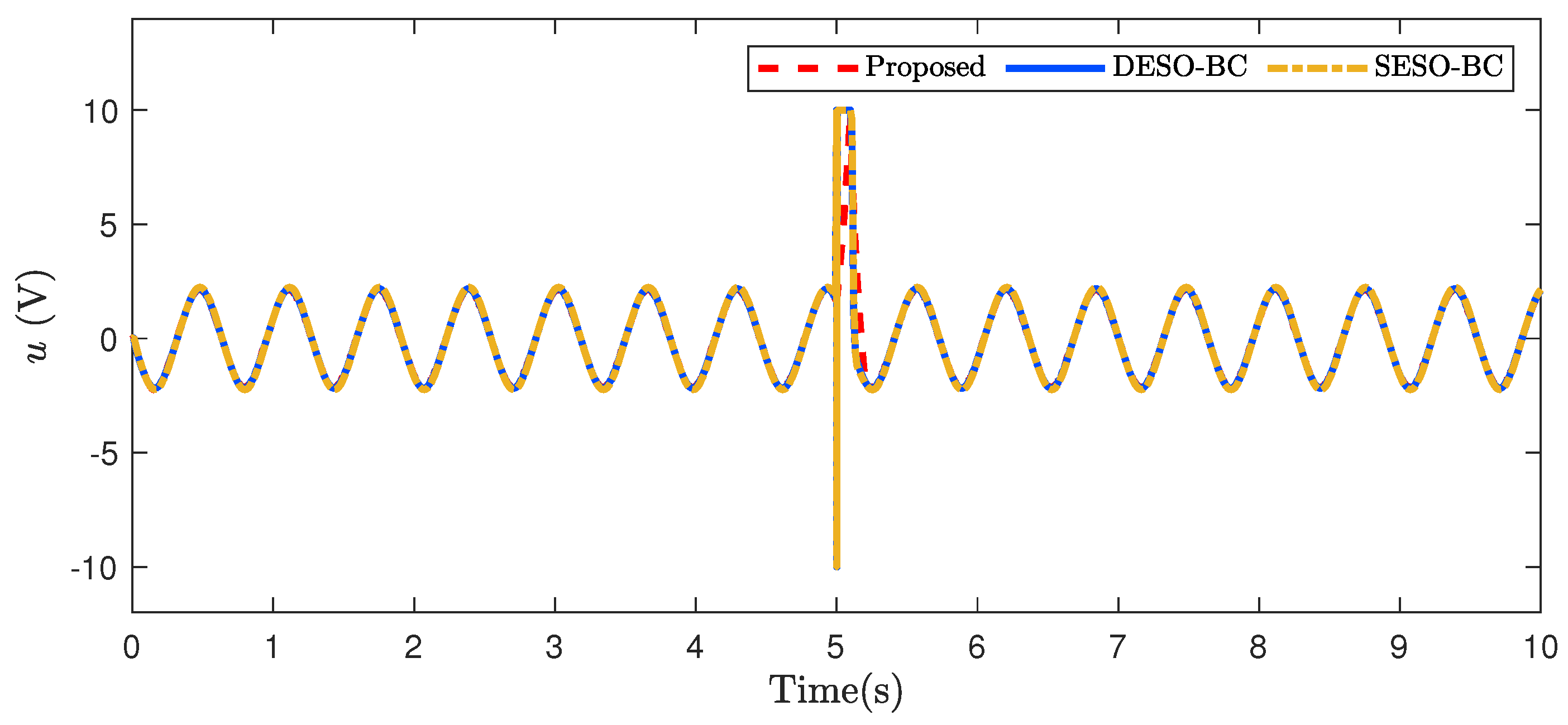
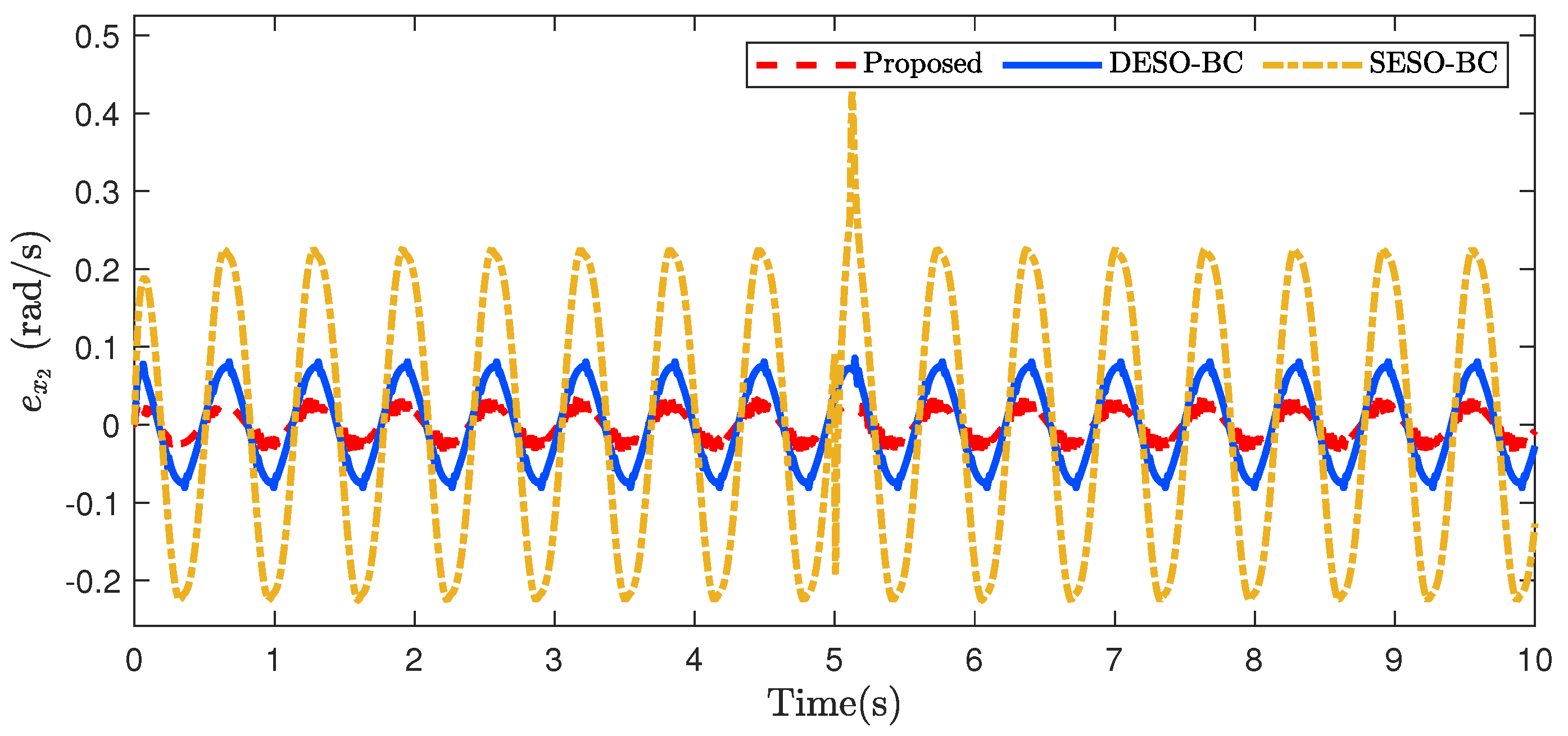
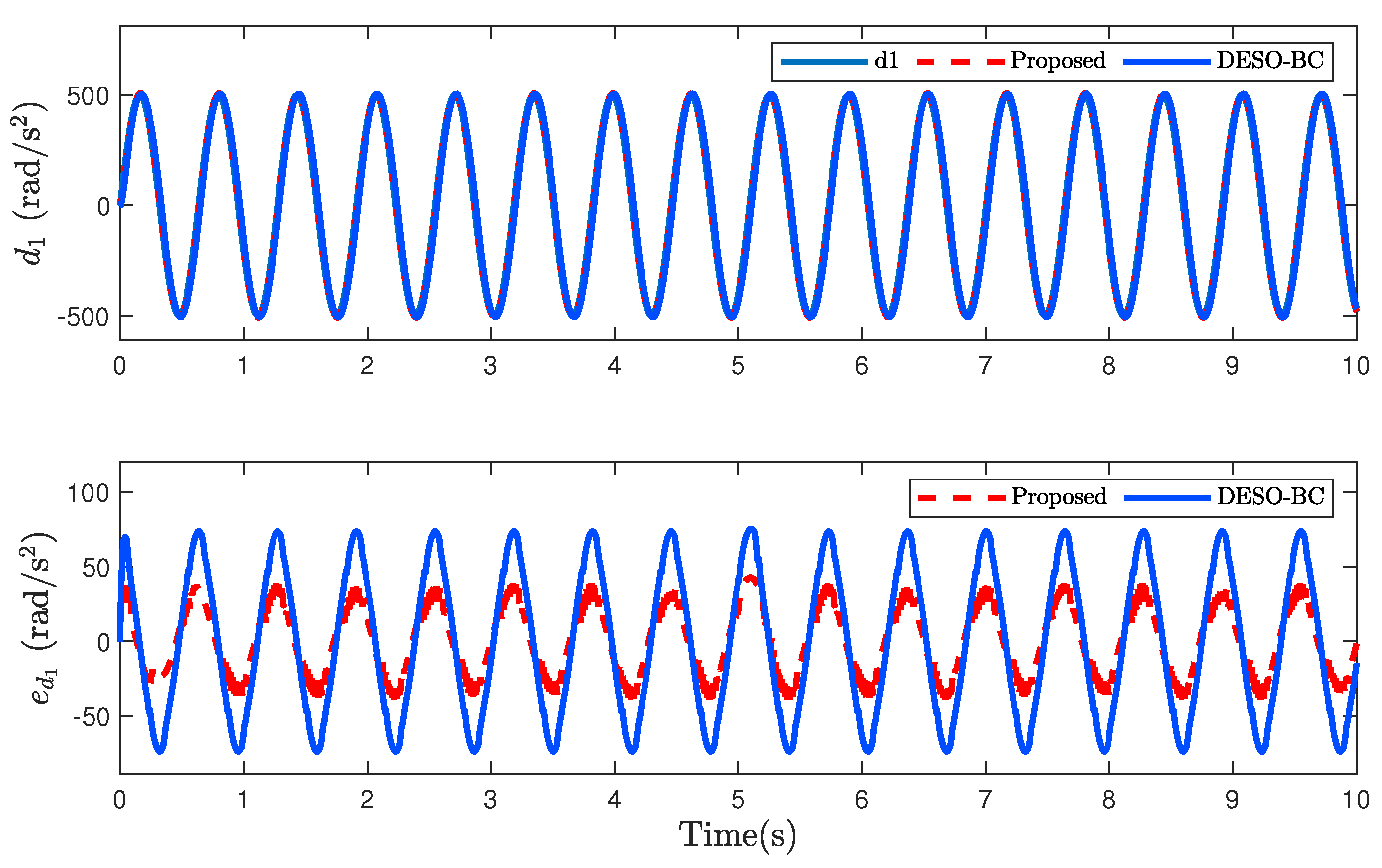
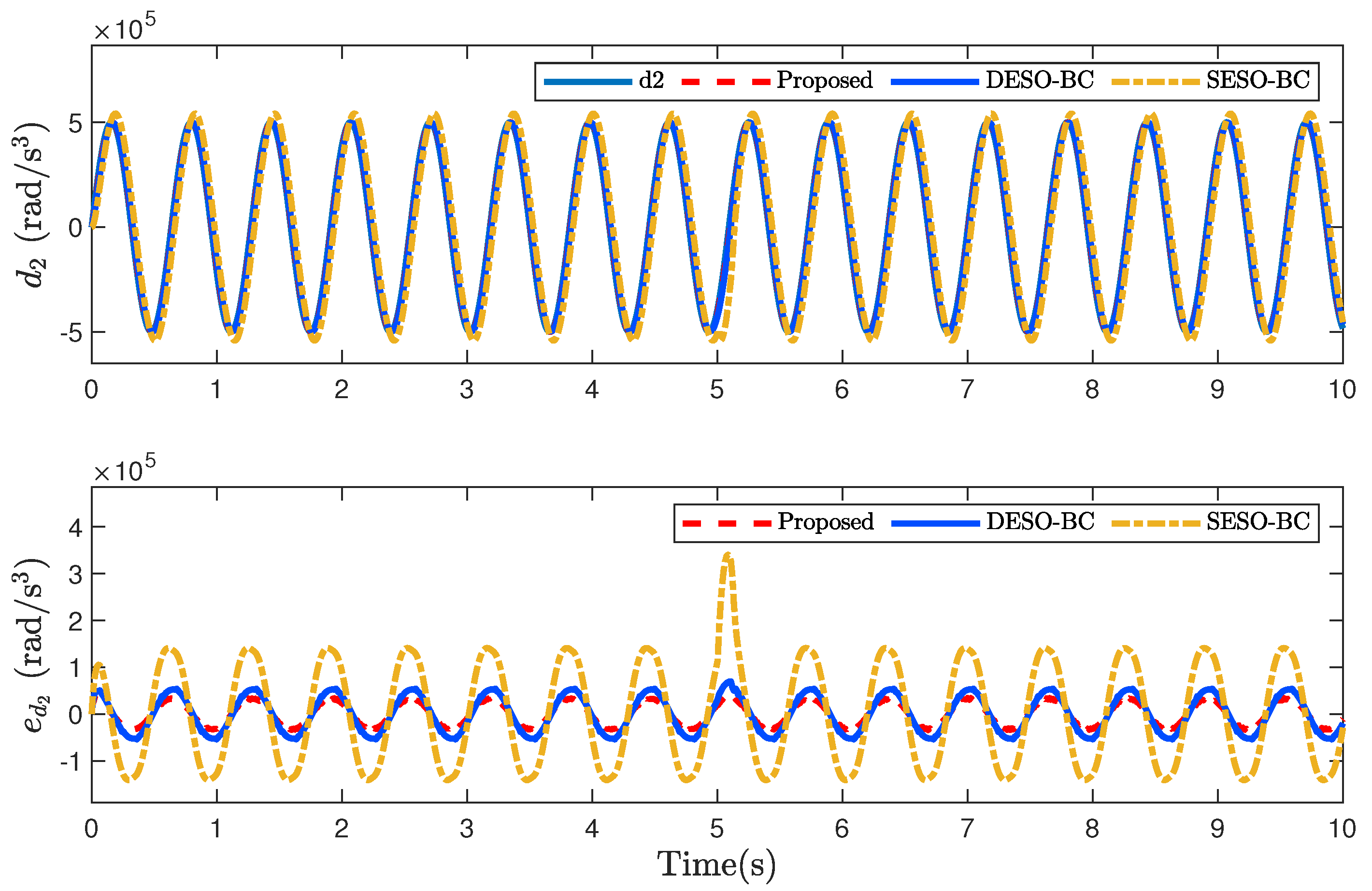
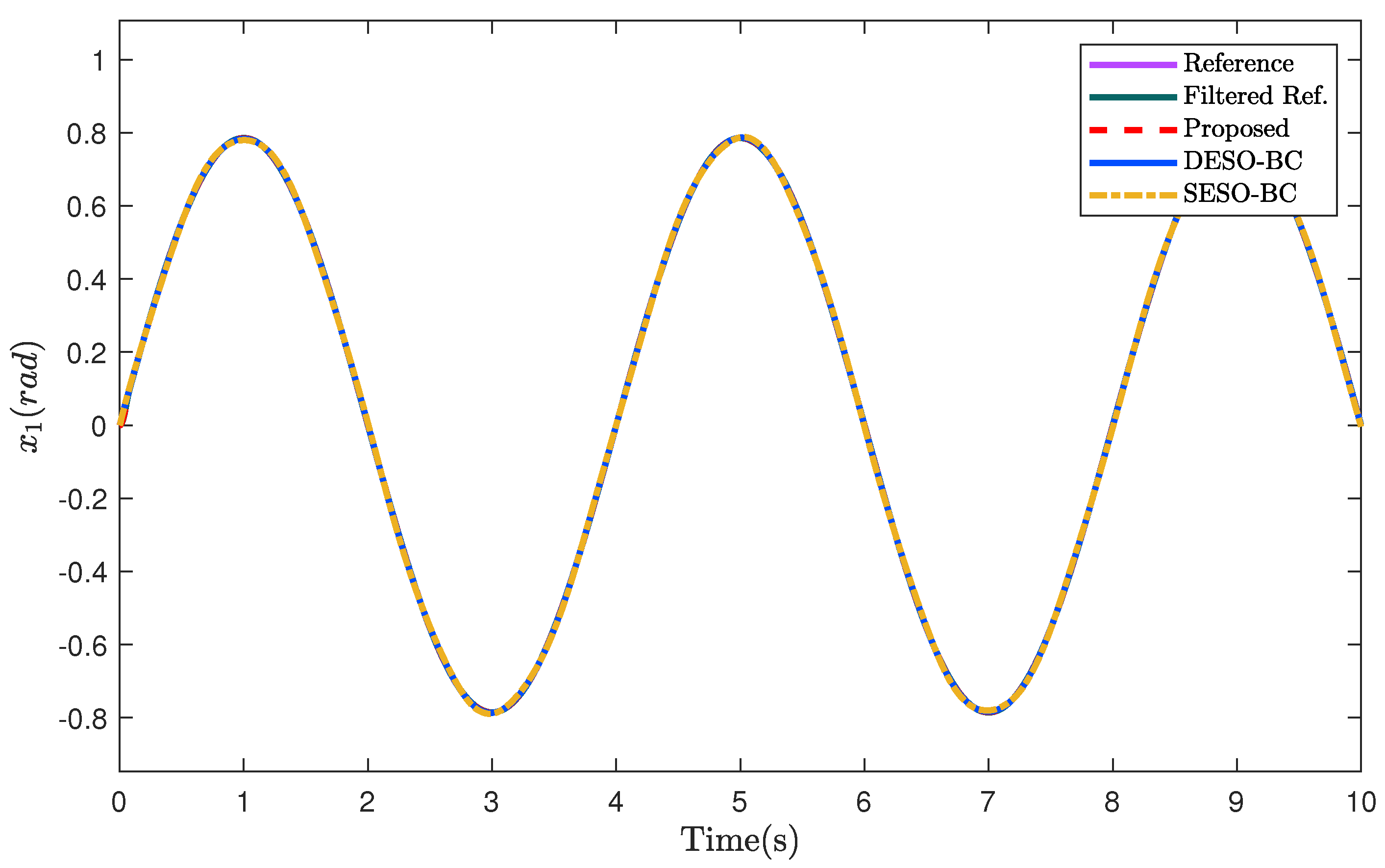
- Proposed control strategy with controller gains as , , . The bandwidths of the designed ESMO and ESO are chosen as and , respectively. The time constant of filters is . For the trajectory planner, its parameters are selected based on the system specifications as , , , , , and .
- (2)
- DESO-BC (Dual Extended State Observer-based Command Filtered Backstepping Controller): Without the integration of PPC, the control structure and controller parameters are chosen as same as the proposed controller. The two ESOs [52] are designed to simultaneously estimate the angular velocity and both lumped mismatched and matched uncertainties, and their bandwidths are picked as and .
- (3)
- SESO-BC (Single Extended State Observer-based Command Filtered Backstepping Controller): The output feedback controller is constructed based on command filtered backstepping control (CF-BSC) framework, whose control architecture and controller gains are designed equivalent to the DESO-BC controller. In this control scheme, an ESO [44] is established to estimate immeasurable angular velocity, load pressure, and lumped matched uncertainty with the bandwidth of the ESO is .
- (1)
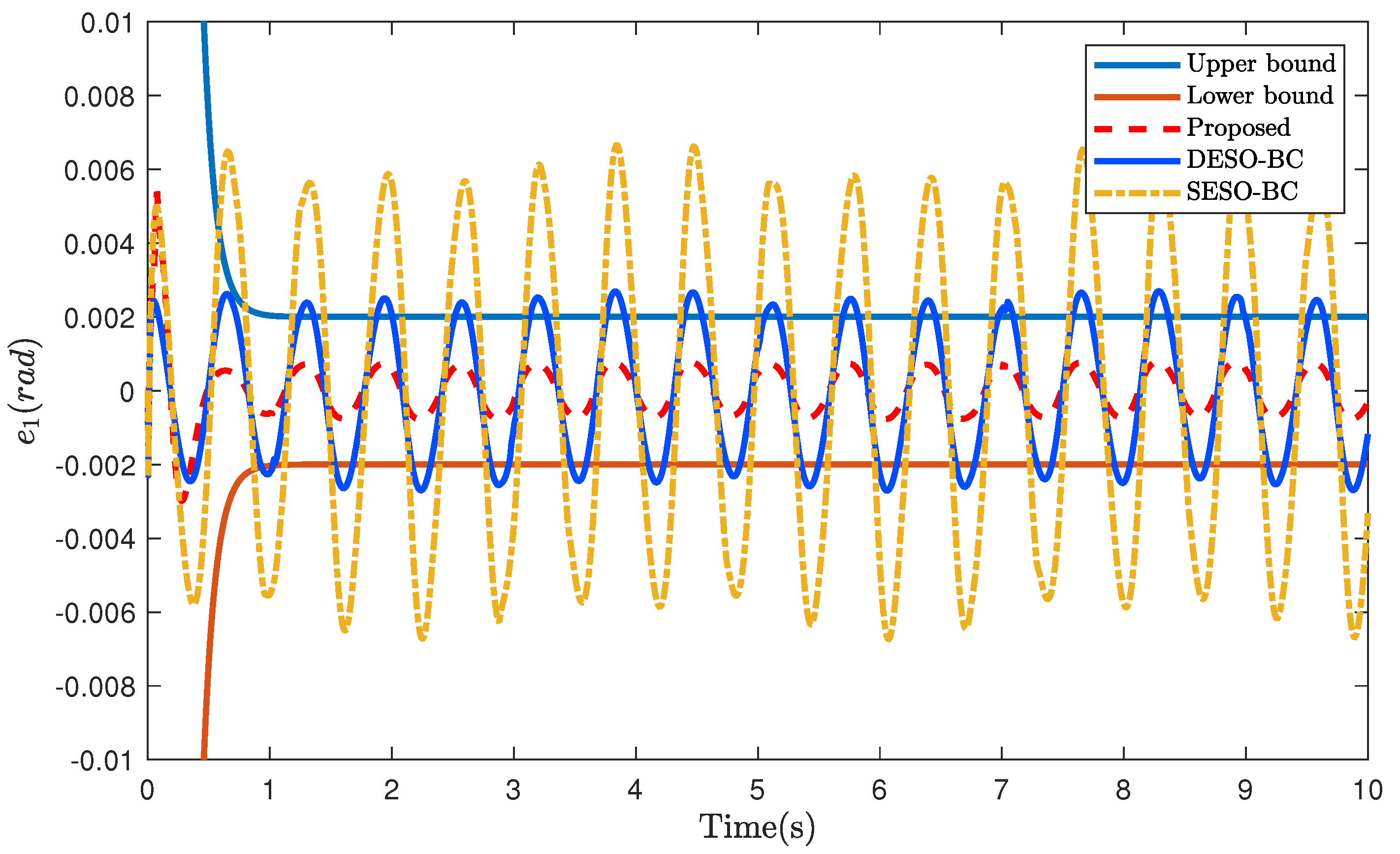
- Maximal absolute tracking errorwhere is the output tracking error and N denotes the number of samples.
- (2)
- Average tracking error
- (3)
- Standard deviation of the tracking errors
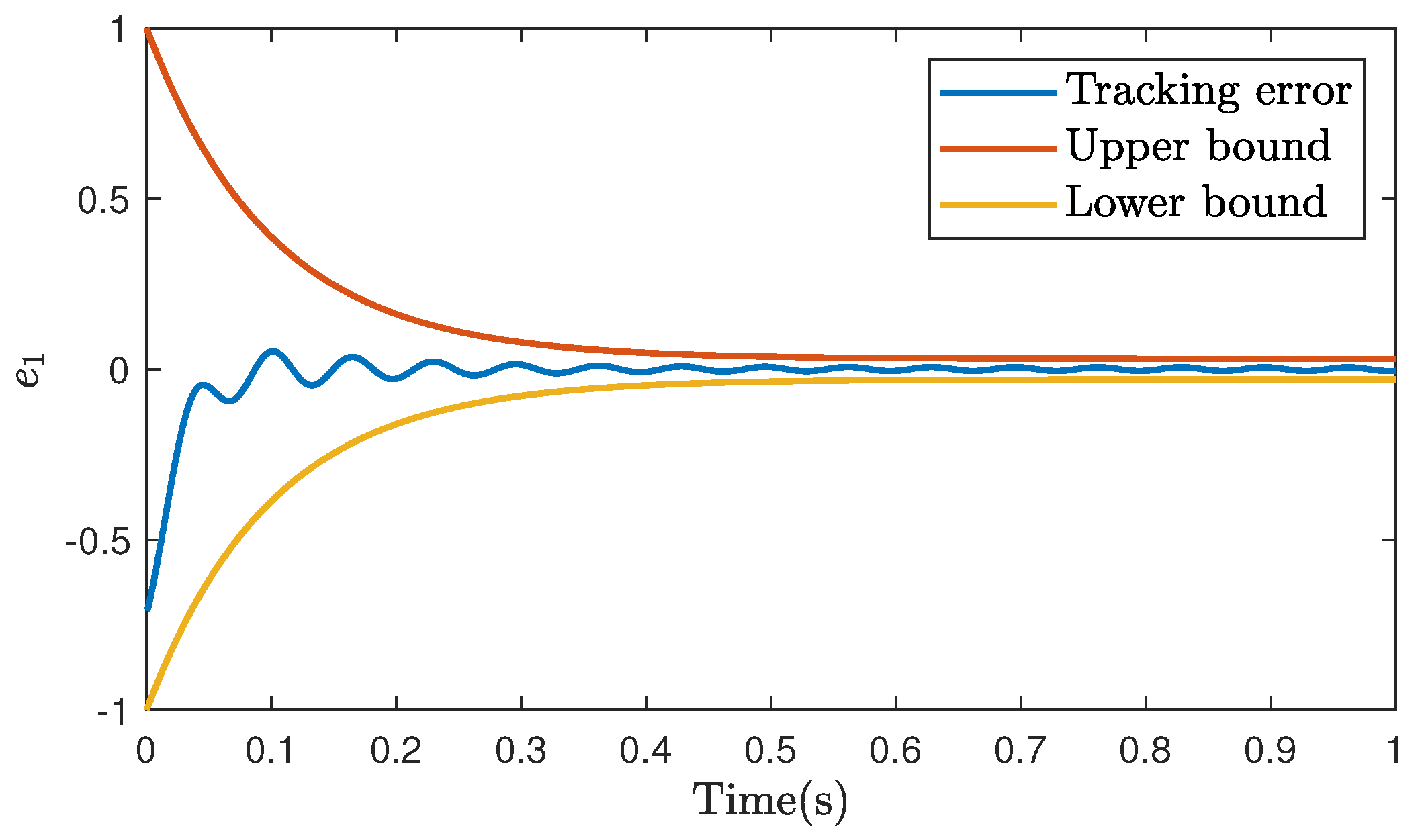
4.2. Case Study 1: Non-Smooth Reference Trajectory
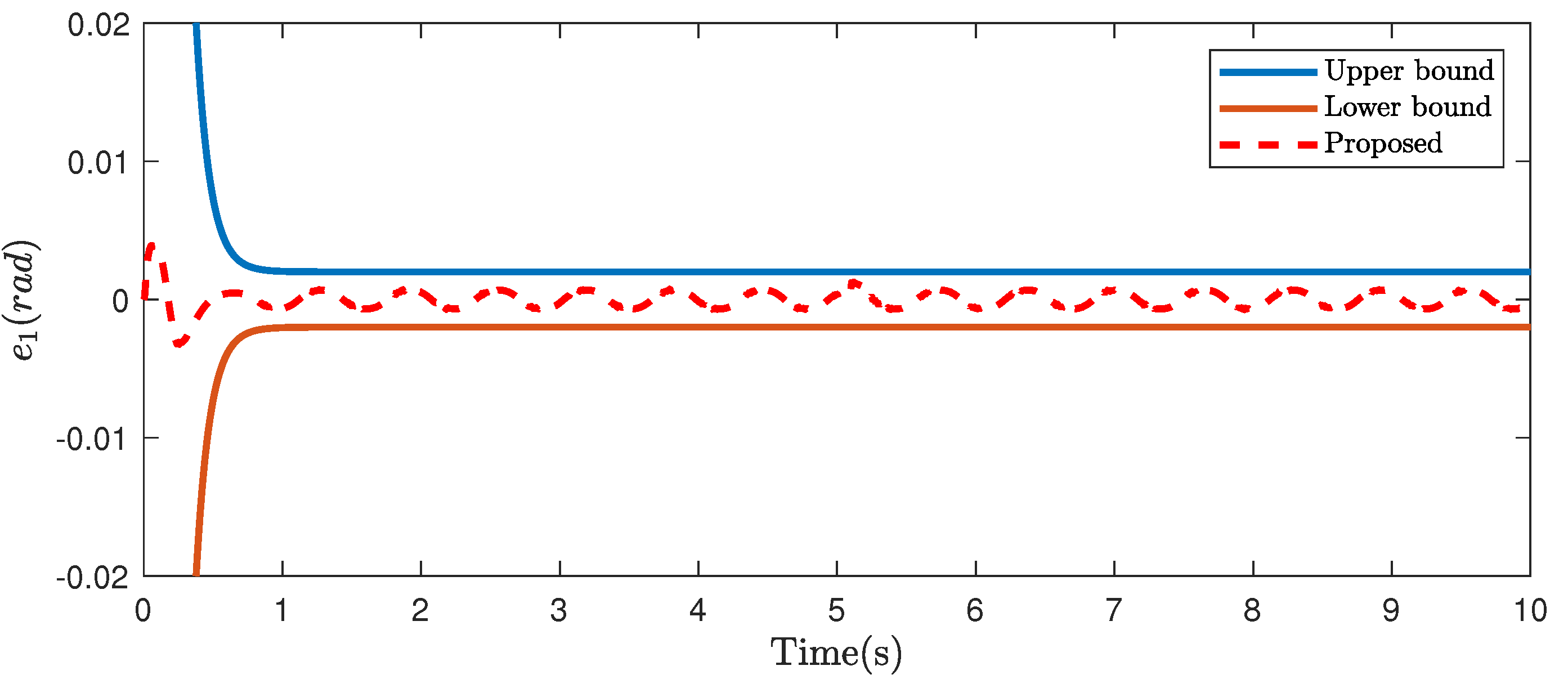
4.3. Case Study 2: Smooth Reference Trajectory
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADCC | Active Disturbance Compensation Control |
| ADRC | Active Disturbance Rejection Control |
| BSC | Backstepping Control |
| CF | Command Filter |
| CF-BSC | Command Filtered Backstepping Control |
| DSC | Dynamic Surface Control |
| EHS | Electro-Hydraulic System |
| ESMO | Extended Sliding Mode Observer |
| ESO | Extended State Observer |
| FLC | Feedback Linearization Control |
| HGDOB | High-gain Disturbance Observer |
| HRA | Hydraulic Rotary Actuator |
| LDOB | Linear Disturbance Observer |
| NDOB | Nonlinear Disturbance Observer |
| PPC | Prescribed Performance Control |
| SMC | Sliding Mode Control |
| TP | Trajectory Planner |
Appendix A
References
- Ding, R.; Zhang, J.; Xu, B.; Cheng, M. Programmable hydraulic control technique in construction machinery: Status, challenges and countermeasures. Autom. Constr. 2018, 95, 172–192. [Google Scholar] [CrossRef]
- Sun, C.; Fang, J.; Wei, J.; Hu, B. Nonlinear Motion Control of a Hydraulic Press Based on an Extended Disturbance Observer. IEEE Access 2018, 6, 18502–18510. [Google Scholar] [CrossRef]
- Yang, X.; Deng, W.; Yao, J. Neural Adaptive Dynamic Surface Asymptotic Tracking Control of Hydraulic Manipulators with Guaranteed Transient Performance. IEEE Trans. Neural Netw. Learn. Syst. 2022, 2022, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Xu, Y.; Chen, Z.; Wang, W.; Aung, N.Z.; Li, S. Cavitation suppression in the nozzle-flapper valves of the aircraft hydraulic system using triangular nozzle exits. Aerosp. Sci. Technol. 2021, 112, 106598. [Google Scholar] [CrossRef]
- Xu, Z.; Qi, G.; Liu, Q.; Yao, J. ESO-based adaptive full state constraint control of uncertain systems and its application to hydraulic servo systems. Mech. Syst. Signal Process. 2022, 167, 108560. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Dao, H.V.; Ahn, K.K. Active Disturbance Rejection Control for Position Tracking of Electro-Hydraulic Servo Systems under Modeling Uncertainty and External Load. Actuators 2021, 10, 20. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Dao, H.V.; Ahn, K.K. Adaptive Robust Position Control of Electro-Hydraulic Servo Systems with Large Uncertainties and Disturbances. Appl. Sci. 2022, 12, 794. [Google Scholar] [CrossRef]
- Mintsa, H.A.; Venugopal, R.; Kenne, J.-P.; Belleau, C. Feedback Linearization-Based Position Control of an Electrohydraulic Servo System with Supply Pressure Uncertainty. IEEE Trans. Control. Syst. Technol. 2012, 20, 1092–1099. [Google Scholar] [CrossRef]
- Phan, V.D.; Vo, C.P.; Dao, H.V.; Ahn, K.K. Actuator Fault-Tolerant Control for an Electro-Hydraulic Actuator Using Time Delay Estimation and Feedback Linearization. IEEE Access 2021, 9, 107111–107123. [Google Scholar] [CrossRef]
- Feng, H.; Song, Q.; Ma, S.; Ma, W.; Yin, C.; Cao, D.; Yu, H. A new adaptive sliding mode controller based on the RBF neural network for an electro-hydraulic servo system. ISA Trans. 2022. [Google Scholar] [CrossRef]
- Zou, Q. Extended state observer-based finite time control of electro-hydraulic system via sliding mode technique. Asian J. Control 2021, 2021, 1–17. [Google Scholar] [CrossRef]
- Yang, X.; Deng, W.; Yao, J. Disturbance-observer-based adaptive command filtered control for uncertain nonlinear systems. ISA Trans. 2022. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Lyu, L.; Helian, B.; Chen, Z.; Yao, B. Precision Motion Control of an Independent Metering Hydraulic System with Nonlinear Flow Modeling and Compensation. IEEE Trans. Ind. Electron. 2022, 69, 7088–7098. [Google Scholar] [CrossRef]
- Yang, X.; Ge, Y.; Deng, W.; Yao, J. Adaptive dynamic surface tracking control for uncertain full-state constrained nonlinear systems with disturbance compensation. J. Frankl. Inst. 2022, 359, 2424–2444. [Google Scholar] [CrossRef]
- Yuan, M.; Chen, Z.; Yao, B.; Hu, J. An Improved Online Trajectory Planner with Stability-Guaranteed Critical Test Curve Algorithm for Generalized Parametric Constraints. IEEE/ASME Trans. Mechatr. 2018, 23, 2459–2469. [Google Scholar] [CrossRef]
- Kim, J.; Croft, E.A. Online near time-optimal trajectory planning for industrial robots. Robot.-Comput.-Integr. Manuf. 2019, 58, 158–171. [Google Scholar] [CrossRef]
- Luo, X.; Li, S.; Liu, S.; Liu, G. An optimal trajectory planning method for path tracking of industrial robots. Robotica 2019, 37, 502–520. [Google Scholar] [CrossRef]
- Lan, J.; Xie, Y.; Liu, G.; Cao, M. A Multi-Objective Trajectory Planning Method for Collaborative Robot. Electronics 2020, 9, 859. [Google Scholar] [CrossRef]
- Gerelli, O.; Bianco, C.G.L. Nonlinear Variable Structure Filter for the Online Trajectory Scaling. IEEE Trans. Ind. Electron. 2009, 56, 3921–3930. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control. 2000, 45, 1893–1899. [Google Scholar] [CrossRef] [Green Version]
- Guo, Q.; Li, X.; Jiang, D. Full-State Error Constraints Based Dynamic Surface Control of Electro-Hydraulic System. IEEE Access 2018, 6, 53092–53101. [Google Scholar] [CrossRef]
- Guo, Q.; Shi, G.; Wang, D. Adaptive Composite Fuzzy Dynamic Surface Control for Electro-Hydraulic-System, with Variable-Supply-Pressure. Asian J. Control. 2020, 22, 521–535. [Google Scholar] [CrossRef]
- Liu, S.; Hao, R.; Zhao, D.; Tian, Z. Adaptive Dynamic Surface Control for Active Suspension with Electro-Hydraulic Actuator Parameter Uncertainty and External Disturbance. IEEE Access 2020, 8, 156645–156653. [Google Scholar] [CrossRef]
- Zhang, X.; Shi, G. Dual extended state observer-based adaptive dynamic surface control for a hydraulic manipulator with actuator dynamics. Mech. Mach. Theory 2022, 169, 104647. [Google Scholar] [CrossRef]
- Farrell, J.A.; Polycarpou, M.; Sharma, M.; Dong, W. Command Filtered Backstepping. IEEE Trans. Autom. Control. 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Xie, H.; Tang, Y.; Shen, G.; Li, X.; Bai, D.; Sa, Y. Command filtered adaptive backstepping control for high-accuracy motion tracking of hydraulic systems with extended state observer. Proc. Inst. Mech. Eng. Part J. Syst. Control. Eng. 2022, 236, 654–668. [Google Scholar] [CrossRef]
- Hao, R.; Wang, H.; Liu, S.; Yang, M.; Tian, Z. Multi-objective command filtered adaptive control for nonlinear hydraulic active suspension systems. Nonlinear Dyn. 2021, 105, 1559–1579. [Google Scholar] [CrossRef]
- Ren, H.; Deng, G.; Hou, B.; Wang, S.; Zhou, G. Finite-Time Command Filtered Backstepping Algorithm-Based Pitch Angle Tracking Control for Wind Turbine Hydraulic Pitch Systems. IEEE Access 2019, 7, 135514–135524. [Google Scholar] [CrossRef]
- Kanchanaharuthai, A.; Mujjalinvimut, E. Fixed-time command-filtered backstepping control design for hydraulic turbine regulating systems. Renew. Energy 2022, 184, 1091–1103. [Google Scholar] [CrossRef]
- Wang, S.; Ren, X.; Na, J.; Zeng, T. Extended-State-Observer-Based Funnel Control for Nonlinear Servomechanisms with Prescribed Tracking Performance. IEEE Trans. Autom. Sci. Eng. 2017, 14, 98–108. [Google Scholar] [CrossRef]
- Guo, G.; Li, D. Adaptive Sliding Mode Control of Vehicular Platoons with Prescribed Tracking Performance. IEEE Trans. Veh. Technol. 2019, 68, 7511–7520. [Google Scholar] [CrossRef]
- Wang, M.; Yang, A. Dynamic Learning From Adaptive Neural Control of Robot Manipulators with Prescribed Performance. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2244–2255. [Google Scholar] [CrossRef]
- Zhang, R.; Xu, B.; Zhao, W. Finite-time prescribed performance control of MEMS gyroscopes. Nonlinear Dyn. 2020, 101, 2223–2234. [Google Scholar] [CrossRef]
- Ho, C.M.; Tran, D.T.; Nguyen, C.H.; Ahn, K.K. Adaptive Neural Command Filtered Control for Pneumatic Active Suspension with Prescribed Performance and Input Saturation. IEEE Access 2021, 9, 56855–56868. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, Q.; Yao, J. Adaptive prescribed performance control for hydraulic system with disturbance compensation. Int. Adapt. Control. Signal Process. 2021, 35, 1544–1561. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, Y.; Shen, H.; Liu, Q.; Yao, J. Funnel function-based asymptotic output feedback control of hydraulic systems with prescribed performance. IET Control Theory Appl. 2021, 15, 2271–2285. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. Neural Adaptive Backstepping Control of a Robotic Manipulator with Prescribed Performance Constraint. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3572–3583. [Google Scholar] [CrossRef]
- Guo, Q.; Liu, Y.; Jiang, D.; Wang, Q.; Xiong, W.; Liu, J.; Li, X. Prescribed Performance Constraint Regulation of Electrohydraulic Control Based on Backstepping with Dynamic Surface. Appl. Sci. 2018, 8, 76. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; He, W.; Li, J.; Xu, B.; Yang, C.; Zhang, W. Disturbance Observer-Based Fault-Tolerant Control for Robotic Systems with Guaranteed Prescribed Performance. IEEE Trans. Cybern. 2022, 52, 772–783. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Liu, X.; Huang, D. Adaptive neural network control for a hydraulic knee exoskeleton with valve deadband and output constraint based on nonlinear disturbance observer. Neurocomputing 2022, 473, 14–23. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-Gain Disturbance Observer-Based Backstepping Control with Output Tracking Error Constraint for Electro-Hydraulic Systems. IEEE Trans. Control. Syst. Technol. 2015, 23, 787–795. [Google Scholar] [CrossRef]
- Yao, Z.; Liang, X.; Zhao, Q.; Yao, J. Adaptive disturbance observer-based control of hydraulic systems with asymptotic stability. Appl. Math. Model. 2022, 105, 226–242. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems with Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Luo, C.; Yao, J.; Gu, J. Extended-state-observer-based output feedback adaptive control of hydraulic system with continuous friction compensation. J. Frankl. Inst. 2019, 356, 8414–8437. [Google Scholar] [CrossRef]
- Zhang, J.; Shi, P.; Lin, W. Extended sliding mode observer based control for Markovian jump linear systems with disturbances. Automatica 2016, 70, 140–147. [Google Scholar] [CrossRef]
- Woldegiorgis, A.T.; Ge, X.; Li, S.; Hassan, M. Extended Sliding Mode Disturbance Observer-Based Sensorless Control of IPMSM for Medium and High-Speed Range Considering Railway Application. IEEE Access 2019, 7, 175302–175312. [Google Scholar] [CrossRef]
- Liu, J.; Vazquez, S.; Wu, L.; Marquez, A.; Gao, H.; Franquelo, L.G. Extended State Observer-Based Sliding-Mode Control for Three-Phase Power Converters. IEEE Trans. Ind. Electron. 2017, 64, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Ke, D.; Wang, F.; He, L.; Li, Z. Predictive Current Control for PMSM Systems Using Extended Sliding Mode Observer with Hurwitz-Based Power Reaching Law. IEEE Trans. Power Electron. 2021, 36, 7223–7232. [Google Scholar] [CrossRef]
- Yu, J.; Sun, Y.; Lin, W.; Li, Z. Fault-tolerant control for descriptor stochastic systems with extended sliding mode observer approach. IET Control Theory Appl. 2017, 11, 1079–1087. [Google Scholar] [CrossRef]
- Dao, H.V.; Ahn, K.K. Extended Sliding Mode Observer-Based Admittance Control for Hydraulic Robots. IEEE Robot. Autom. Lett. 2022, 7, 3992–3999. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W. Active Disturbance Rejection Adaptive Control of Hydraulic Servo Systems. IEEE Trans. Ind. Electron. 2017, 64, 8023–8032. [Google Scholar] [CrossRef]
- Merritt, H.E. Hydraulic Control Systems; J. Wiley: Hoboken, NJ, USA, 1967. [Google Scholar]
- Deng, W.; Yao, J.; Wang, Y.; Yang, X.; Chen, J. Output feedback backstepping control of hydraulic actuators with valve dynamics compensation. Mech. Syst. Signal Process. 2021, 158, 107769. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value | Parameter | Unit | Value |
|---|---|---|---|---|---|
| J | 0.2 | ||||
| B | 90 | ||||
| 10 | |||||
| or | |||||
| Controller | (rad) | (rad) | (rad) |
|---|---|---|---|
| Proposed | |||
| DESO-BC | |||
| SESO-BC |
| Controller | (rad) | (rad) | (rad) |
|---|---|---|---|
| Proposed | |||
| DESO-BC | |||
| SESO-BC |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, M.H.; Ahn, K.K. A Novel Trajectory Adjustment Mechanism-Based Prescribed Performance Tracking Control for Electro-Hydraulic Systems Subject to Disturbances and Modeling Uncertainties. Appl. Sci. 2022, 12, 6034. https://doi.org/10.3390/app12126034
Nguyen MH, Ahn KK. A Novel Trajectory Adjustment Mechanism-Based Prescribed Performance Tracking Control for Electro-Hydraulic Systems Subject to Disturbances and Modeling Uncertainties. Applied Sciences. 2022; 12(12):6034. https://doi.org/10.3390/app12126034
Chicago/Turabian StyleNguyen, Manh Hung, and Kyoung Kwan Ahn. 2022. "A Novel Trajectory Adjustment Mechanism-Based Prescribed Performance Tracking Control for Electro-Hydraulic Systems Subject to Disturbances and Modeling Uncertainties" Applied Sciences 12, no. 12: 6034. https://doi.org/10.3390/app12126034
APA StyleNguyen, M. H., & Ahn, K. K. (2022). A Novel Trajectory Adjustment Mechanism-Based Prescribed Performance Tracking Control for Electro-Hydraulic Systems Subject to Disturbances and Modeling Uncertainties. Applied Sciences, 12(12), 6034. https://doi.org/10.3390/app12126034