
Research on Intelligent Detection Algorithm of the Single Anchored Mooring Area for Maritime Autonomous Surface Ships



Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.2.1. Safety Distance between Anchoring Ships
1.2.2. Method of Mooring Area Detection
1.3. Motivation
- The anchorage circle radius model was improved by considering parameters such as ship type, ship width, ship length, distance from anchor chain hole to bow and stern line, trim angle and water depth and so on. The improved model reflects engineering practice more accurately, ensuring the authenticity of the results.
- The safety distance model between the anchor positions was also improved. The improved model not only considered the parameters of the anchorage circle radius model, but also took into account the safety impact caused by ships passing through the anchorage. The improved model presents a better reflection of the engineering practice, making the distance safer and more reasonable.
- An intelligent detection algorithm combining the anchorage area detection model and the Monte-Carlo stochastic simulation method was established, and a large amount of random numbers were used to perform the detection operation and simulation, so as to quickly obtain the distribution of the anchor position of ships waiting to anchor. Under the support of the anchor position conversion model, and the dropping anchor position conversion model, the draping anchor position or the ship position of the dropping anchor were transferred from the anchor position.
1.4. Contributions
- The anchorage circle radius model and safety distance model between the anchor position were improved, which can help to fully reflect the engineering practice in a more safe and reasonable way.
- An intelligent model combining the MASS mooring area detection model and the Monte-Carlo stochastic simulation method was established, which can quickly detect the anchor position that matches with MASS, thereby improving on the previous research on mooring area detection.
2. Mooring Area Detection of Single Anchored MASS
2.1. Motion Law of Single Anchoring Ship
2.2. Method of Traditional Ship Anchorage Area Detection
3. Methodology
3.1. Anchorage Circle Radius Model
3.2. Safety Distance Model
3.3. Conversion Model of Position of Anchor-Dropping
3.4. Conversion Model of Anchor Position
- There is a certain time interval from the issued order of anchoring to the actual settlement of the anchor. Since the ship moves with a certain speed, a certain displacement of the anchor in the horizontal plane of the ship’s movement is detectable. The operation of anchoring by the windlass takes longer than gravity anchoring, and will generate more horizontal displacement.
- There is a certain horizontal displacement during the process of the anchor falling to the bottom, inserting into the bottom material and stabilizing to the anchor position.
- The anchor and anchor chain are affected by wind and waves during the anchoring operation, resulting in a certain displacement of the anchor in the horizontal direction.
- During the reversing process of the ship, a large horizontal force upon the ship is generated, and the anchor is dragged, thus presenting a certain horizontal displacement.
3.5. Monte-Carlo Mooring Area Detection Model
- Establish a mooring area detection model. By establishing the plane rectangular coordinate system of the anchorage area, two-dimensional coordinates are set for ships or objects in the anchorage that hinder the anchoring operation. Then, the Euclidean metric method is adopted to construct the anchoring area detection model of the anchoring ship, so as to select the anchor position that meets the safety distance between two anchoring ships, as in Equation (12).where, is the position of the existing ship or other objects in the plane rectangular coordinate system of the anchorage area. is the anchor position, which satisfies the safety distance of anchoring ships.
- The random function of the Monte-Carlo method is taken to generate random two-dimensional coordinates in varying amounts within the anchorage, so as to simulate the ship position of the existing anchoring ship, namely, to simulate the interference term of the target anchoring ship during the detection of the anchorage area. The distance of these coordinates meets the safety distance requirements for anchoring ships. Then, with the conversion model of the anchor position, the above ship positions are converted into the anchor position of the existing anchoring ship.
- The random function of the Monte-Carlo method is taken to generate random two-dimensional coordinates in varying numbers within the anchorage, so as to simulate the two-dimensional coordinates of the ship positions of the target ship.
- Based on Equation (12), the two-dimensional coordinates of the anchor positions of the target ships are calculated that meet the requirements of .
4. Case Study
4.1. Set Up
- The influence of wind, current and anchoring ship on the anchoring was not taken into consideration, that is, the anchoring dropping point coincided with the anchor position, L0 = 0;
- The anchor position was directly in front of the ship, that is, on the ship’s course line;
- The trim angle of the ship was assumed to be α = 0.5°;
- In this experiment, the selected ship type was a general cargo ship, = 1;
- The positioning error of GPS/GNSS/BDS was not taken into account.
4.2. Procedure
5. Results
5.1. Anchorage Circle Radius
- The anchorage circle radius value was relatively small. Compared with models A/C/D/E, the value of model F, which involves no consideration of the safety impact of passing ships, was significantly smaller when the wind force was less than or equal to 7. Compared with models B/C/D/E, model G, in which the safety impact of passing ships was taken into consideration, showed a middle value. The values of H and B, which both had a wind force of greater than 7, were also relatively small. Model I, which was set with the consideration of the safety impact of passing ships, had a wind force of greater than 7 and a safety distance of twice the ship’s width, suggested a greater value than model B with the difference of 5–15%.
- Additional factors were considered. Models F~G considered factors such as water depth, wind power, ship type, ship loading condition, and ship parameters comprehensively. Therefore, the models mentioned above reflected the engineering practice background well with more accuracy.
- Models G and I fully considered the influence of the safety of ships passing through the anchorage with the safety distance set to improve the anchoring safety.
- Models F~G featured safety and high anchorage utilization. The Chinese standard of the length of the outgoing chain is suitable for various extreme environments, and its standard length is the longest. Models F~G adopted the above Chinese standard, but resulted in a relatively small anchorage circle radius, which improved the utilization rate of the anchorage under the premise of ensuring safety.
- In model B, a small slope coefficient was selected for the water depth variable and a large constant was obtained for the intercept. Model C selects a larger slope parameter for the water depth variable. Model B pays more attention to the influence of wind on the anchorage radius. However, model C better considered the influence of the bottom sediment griping force on the anchoring radius. From the perspective of anchoring safety, Model B is more conservative.
5.2. Anchor Position Detection
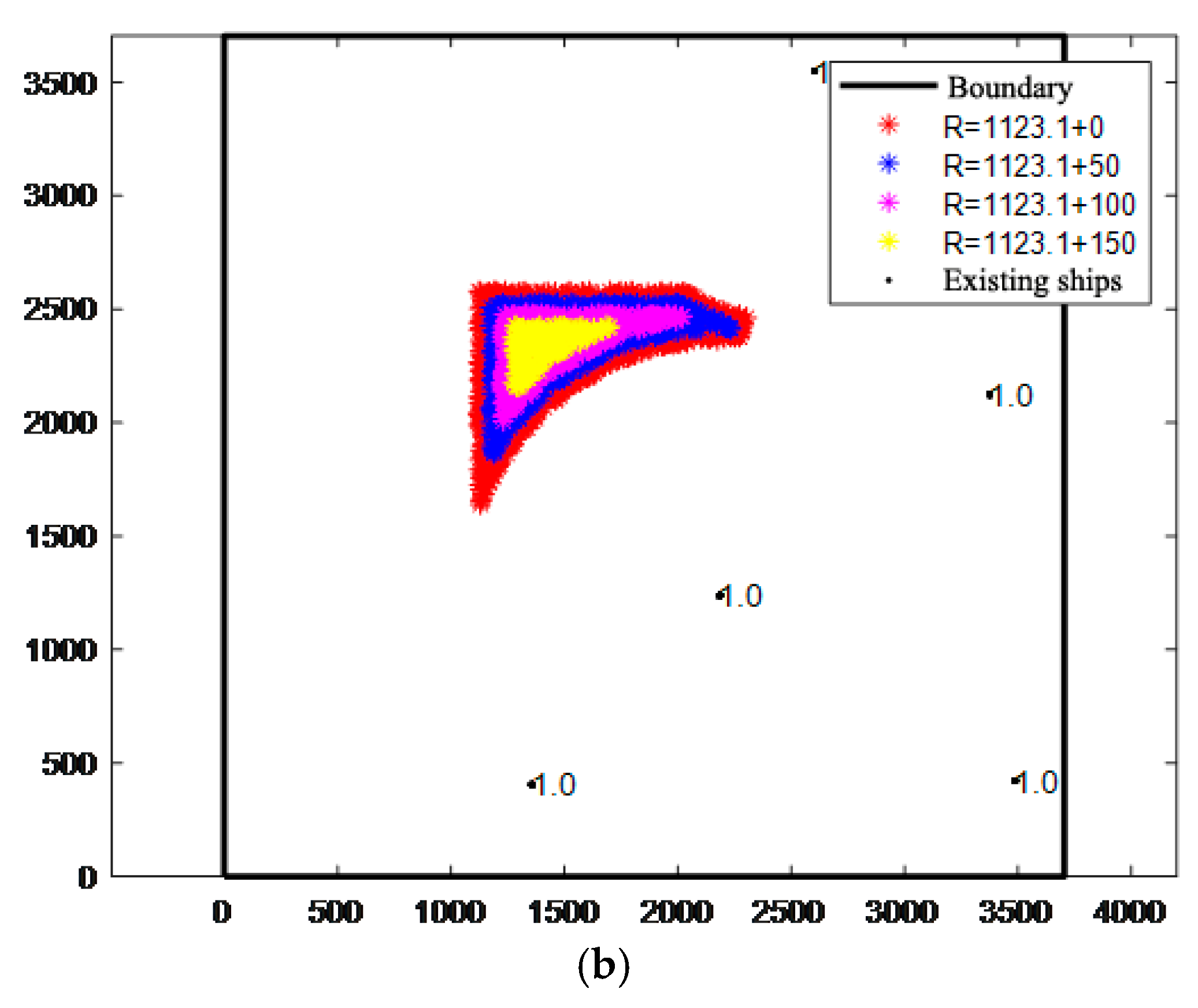
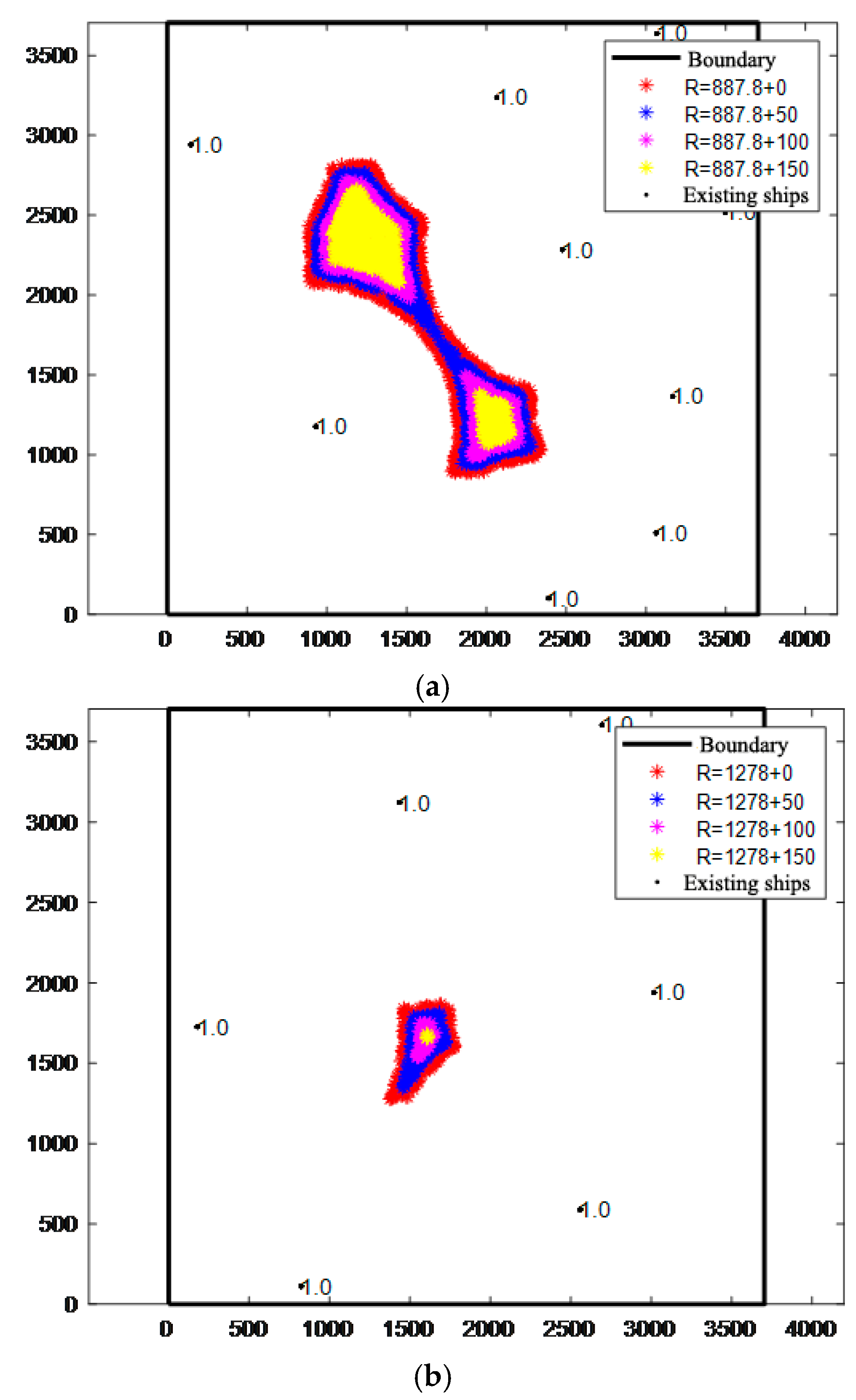
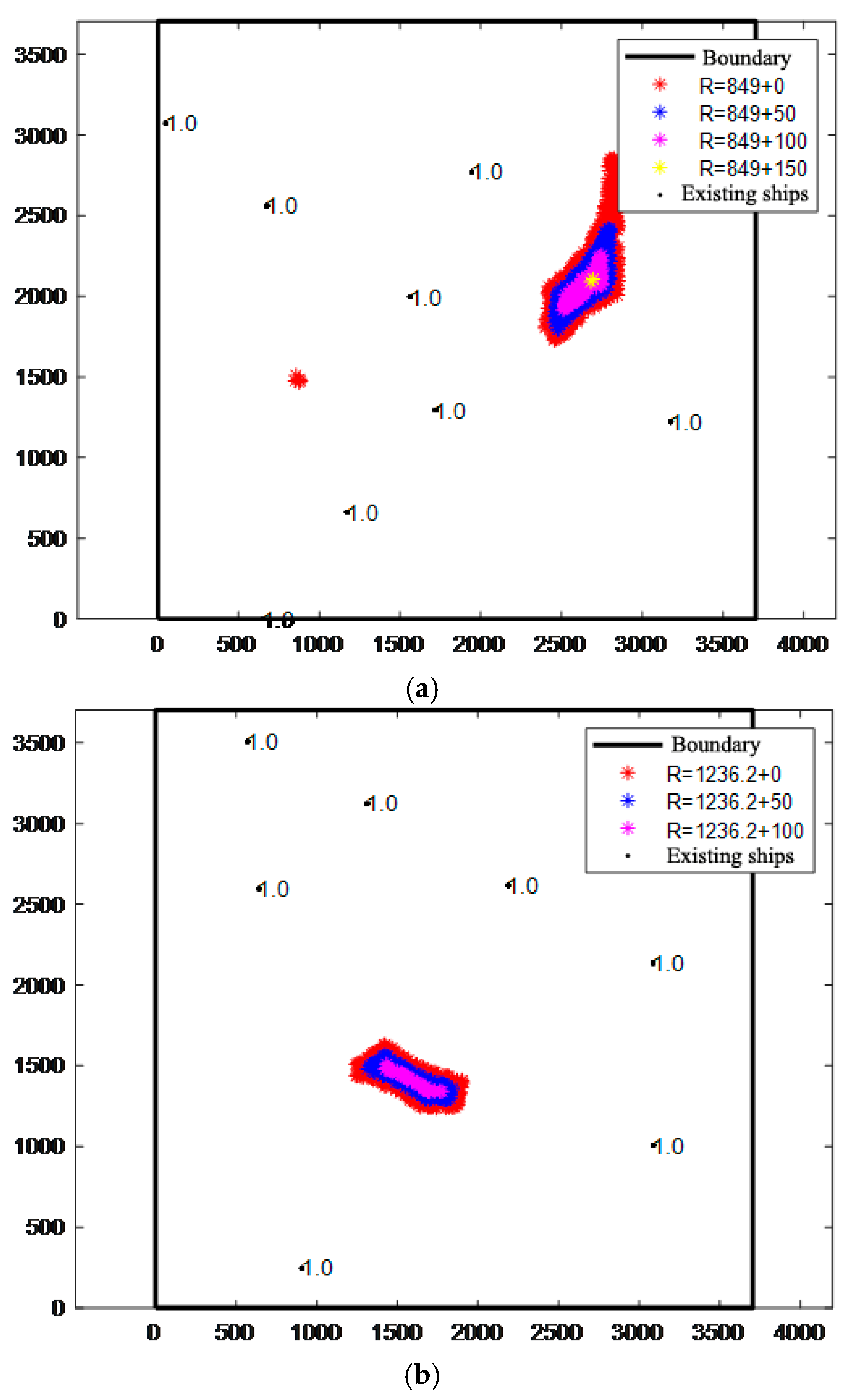
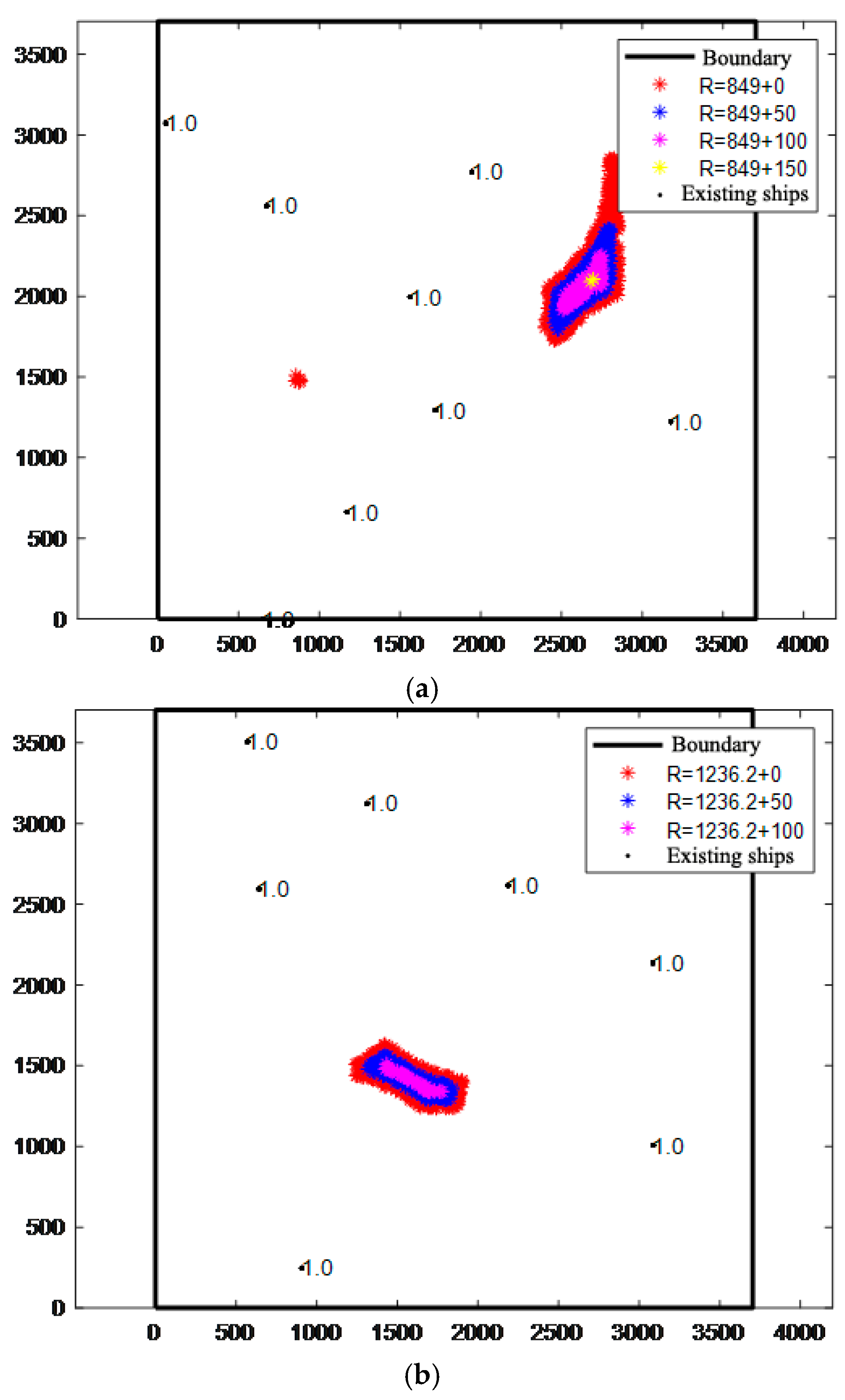
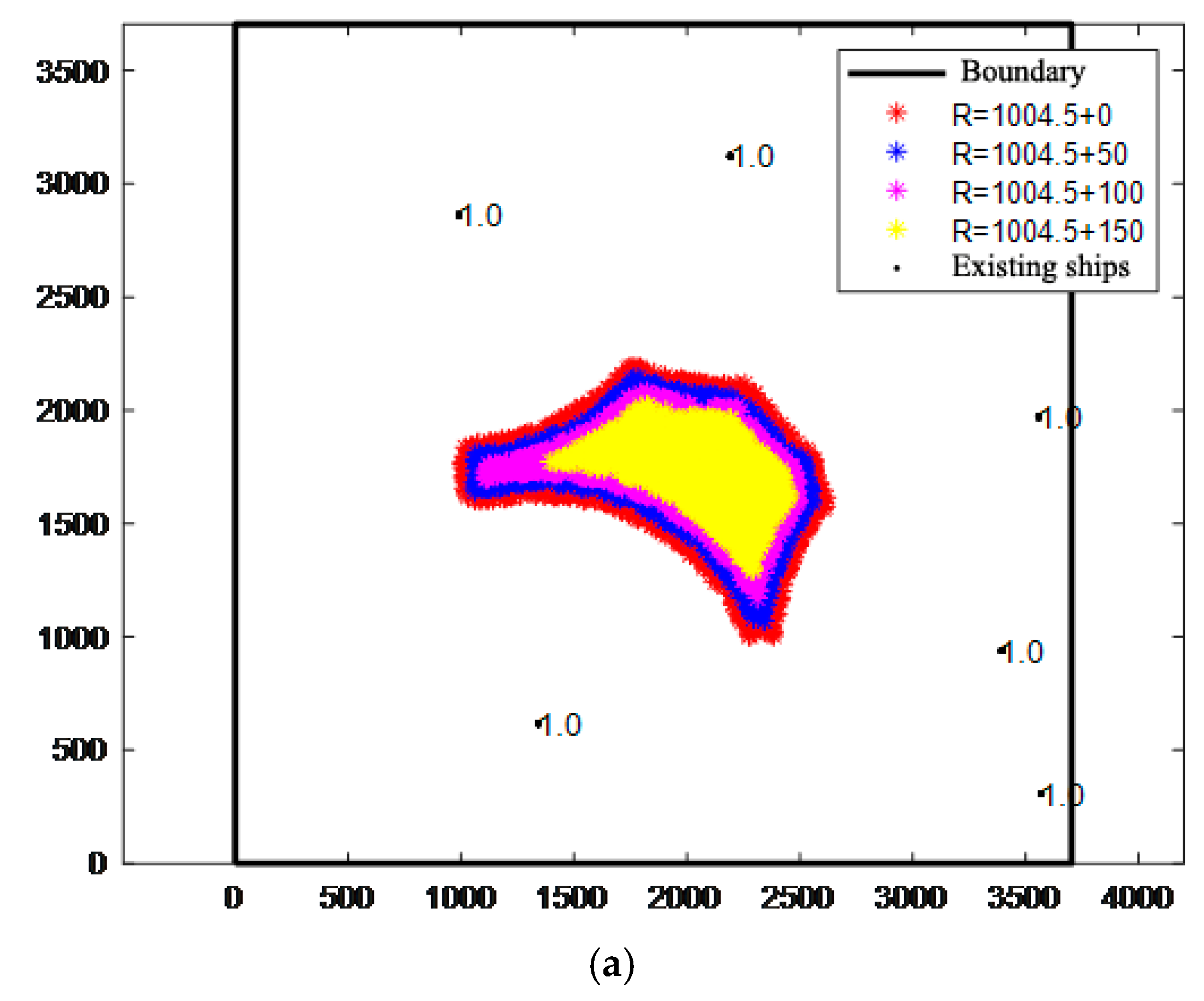
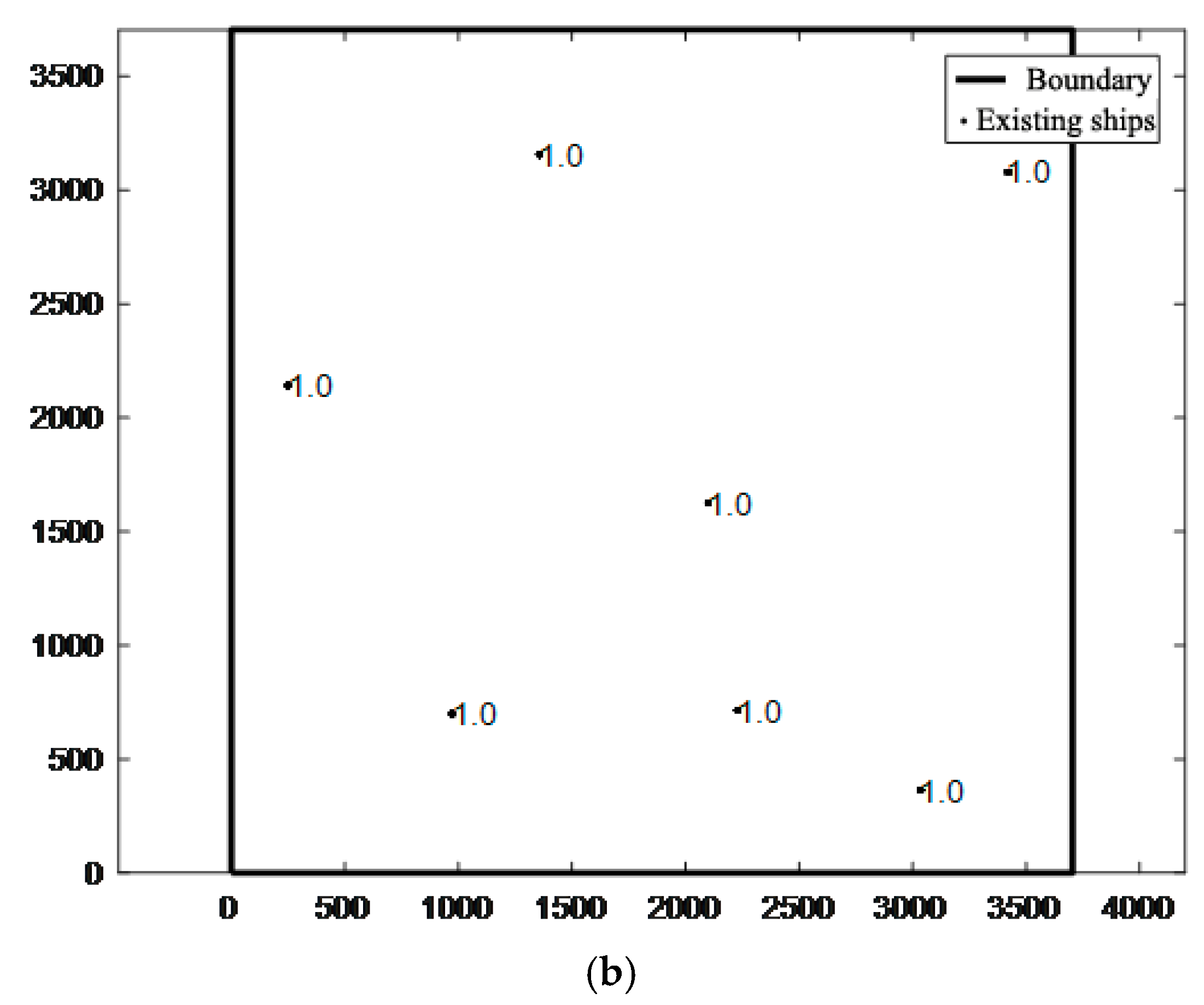
- The intelligent MASS mooring area detection algorithm based on the improved anchorage area radius model and the Monte-Carlo stochastic simulation method sampled a total of 5000 times and required 1.1 s to output the detection results. The experimental results showed that the detection algorithm can accurately and efficiently detect the distribution of anchor positions within the anchorage boundary.
- The intelligent MASS mooring area detection algorithm fully considered the influence of the ship type on the anchoring distance, and provided a reasonable mooring area detection scheme for ships with hazardous items such as oil and liquefied gas.
- The intelligent MASS mooring area detection algorithm fully considers the safety needs of ships passing through the anchorage with a certain safety distance.
- The intelligent MASS mooring area detection algorithm fully considers the influence of the anchorage boundary. The tail of the target ship can effectively avoid the anchorage boundary and prevent the anchoring ship from floating out of the anchorage boundary.
- The intelligent MASS mooring area detection algorithm can flexibly increase the safety distance as the circumstances may require. In this experiment, the distance of 50 m was adopted as the super parameter distance so as to flexibly adjust the safety distance of anchoring ships, as shown in Figure 9, Figure 10, Figure 11 and Figure 12.
6. Conclusions
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ge, H.; Wang, Z.; Liang, B.; Zhang, Z.; Yan, Z.; Li, Z. A Systematic Study on Berthing Capacity Assessment of Sanya Yazhou Fishing Port by Typhoon Prediction Model. J. Mar. Sci. Eng. 2021, 9, 1380. [Google Scholar] [CrossRef]
- Li, M.; Mou, J.; Chen, L.; He, Y.; Huang, Y. A rule-aware time-varying conflict risk measure for MASS considering maritime practice. Reliab. Eng. Syst. Saf. 2021, 215, 107816. [Google Scholar] [CrossRef]
- Wu, J.; Yu, Y.; Cheng, S.; Li, Z.; Yu, J. Probabilistic multilevel robustness assessment framework for a TLP under mooring failure considering uncertainties. Reliab. Eng. Syst. Saf. 2022, 223, 108458. [Google Scholar] [CrossRef]
- Yan, X. Research Status and Development Trend of Intelligent Ships. Commun. Shipp. 2016, 3, 25–28. [Google Scholar]
- Hwang, T.; Youn, I.-H. Navigation Scenario Permutation Model for Training of Maritime Autonomous Surface Ship Remote Operators. Appl. Sci. 2022, 12, 1651. [Google Scholar] [CrossRef]
- Chang, C.-H.; Kontovas, C.; Yu, Q.; Yang, Z. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. [Google Scholar] [CrossRef]
- Zhong, S.; Wen, Y.; Huang, Y.; Cheng, X.; Huang, L. Ontological Ship Behavior Modeling Based on COLREGs for Knowledge Reasoning. J. Mar. Sci. Eng. 2022, 10, 203. [Google Scholar] [CrossRef]
- Bibuli, M.; Odetti, A.; Zereik, E. Adaptive steering control for an azimuth thrusters-based autonomous vessel. J. Mar. Eng. Technol. 2020, 19, 76–91. [Google Scholar] [CrossRef]
- Mo, T. “14th Five-Year” Development Plan for China’s Digital Transportation; Ministry of Transport of the People’s Republic of China: Beijing, China, 2022.
- Mo, T. China’s “14th Five-Year” Modern Comprehensive Transportation System Development Plan; Ministry of Transport of the People’s Republic of China: Beijing, China, 2022.
- Wang, Y.; Chen, P.; Wu, B.; Wan, C.; Yang, Z. A trustable architecture over blockchain to facilitate maritime administration for MASS systems. Reliab. Eng. Syst. Saf. 2022, 219, 108246. [Google Scholar] [CrossRef]
- CCS. Rules for Intelligent Ship; China Classification Society: Beijing, China, 2020. [Google Scholar]
- Su, W. China Classification Society Published Rules for Intelligent Ship. Ship Eng. 2020, 42, 13–14. [Google Scholar]
- Fan, A.; Yan, X.; Bucknall, R.; Yin, Q.; Ji, S.; Liu, Y.; Song, R.; Chen, X. A novel ship energy efficiency model considering random environmental parameters. J. Mar. Eng. Technol. 2020, 19, 215–228. [Google Scholar] [CrossRef]
- Bredow, R.; Kamiński, M. Structural Safety of the Steel Hall under Dynamic Excitation Using the Relative Probabilistic Entropy Concept. Materials 2022, 15, 3587. [Google Scholar] [CrossRef] [PubMed]
- Tong, R.; Li, H.; Zhang, B.; Yang, X.; Ma, X. Modeling of unsafe behavior risk assessment: A case study of Chinese furniture manufacturers. Saf. Sci. 2021, 136, 105157. [Google Scholar] [CrossRef]
- He, J.; Luo, J.; Huan, P.; Deng, J. Workspace Analysis of 7-DOF Humanoid Robotic Arm Based on Monte Carlo Method. Modul. Mach. Tool Autom. Manuf. Tech. 2015, 3, 48–51. [Google Scholar]
- Leong, D.; Low, Y.M.; Kim, Y. Control variates for efficient long-term extreme analysis of mooring lines. Eng. Struct. 2020, 221, 111063. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Z.; Tian, Y.; Wang, B.; Yang, H.; Wu, G. Evaluation method for helicopter maritime search and rescue response plan with uncertainty. Chin. J. Aeronaut. 2021, 34, 493–507. [Google Scholar] [CrossRef]
- Hu, S.P.; Huang, C.H.; Guo, Y.L.; Li, B. Dynamic process simulation of ship pilotage risk at harbour based on transition probability model. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017. [Google Scholar] [CrossRef]
- Li, R.; Huang, J.; Pan, X.; Hu, Q.; Huang, Z. Path following of underactuated surface ships based on model predictive control with neural network. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420945956. [Google Scholar] [CrossRef]
- Li, R.; Jia, B.; Fan, S.; Pan, X. A novel active disturbance rejection control with hyperbolic tangent function for path following of underactuated marine surface ships. Meas. Control. 2020, 53, 1579–1588. [Google Scholar] [CrossRef]
- Yin, J.; Wang, N. Predictive Trajectory Tracking Control of Autonomous Underwater Vehicles Based on Variable Fuzzy Predictor. Int. J. Fuzzy Syst. 2021, 23, 1809–1822. [Google Scholar] [CrossRef]
- Zalewski, P. Integrity Concept for Maritime Autonomous Surface Ships’ Position Sensors. Sensors 2020, 20, 2075. [Google Scholar] [CrossRef] [Green Version]
- Forrester, G.E. The influence of boat moorings on anchoring and potential anchor damage to coral reefs. Ocean. Coast. Manag. 2020, 198, 105354. [Google Scholar] [CrossRef]
- Wu, J.; Wu, B.; Liu, D.; Zhang, B.; Luo, H. Safety Evaluation System for Anchored Vessels in Tianjin Anchorage Under Strong Wind. J. Dalian Marit. Univ. 2013, 39, 49–52. [Google Scholar]
- Oz, D.; Aksakalli, V.; Alkaya, A.F.; Aydogdu, V. An anchorage planning strategy with safety and utilization considerations. Comput. Oper. Res. 2015, 62, 12–22. [Google Scholar] [CrossRef]
- Park, J.; Kim, S. A Improvement Plans for Anchorage at Masan Port. J. Korean Soc. Mar. Environ. Saf. 2018, 24, 637–645. [Google Scholar] [CrossRef]
- Li, X. Research on the Relative Safe Distance for Roadstead. China Harb. Eng. 2015, 35, 16–18+24. [Google Scholar]
- Chen, C.; Dai, R.; Li, Q.; Wu, Z. Anchoring Radius Based on Regression Analysis. Port Waterw. Eng. 2015, 10, 9–12+26. [Google Scholar]
- Lalla-Ruiz, E.; Shi, X.; Voß, S. The waterway ship scheduling problem. Transp. Res. Part D Transp. Environ. 2018, 60, 191–209. [Google Scholar] [CrossRef]
- Yan, S.-W.; Huo, Z.-L.; Sun, L.-Q.; Liu, R. Risk assessment on a pipeline passing through a ship mooring area. China Ocean. Eng. 2014, 28, 207–214. [Google Scholar] [CrossRef]
- Pan, G. Maneuvering and anchor position Analysis of Large Ship Anchoring in Beilun Port. Mar. Technol. 2013, 2, 15–18. [Google Scholar]
- Song, Y. AIS Data Based on the Large Ship Anchorage Circle Radius and the Distance of Research; Dalian Maritime University: Dalian, China, 2010. [Google Scholar]
- Tang, H.; Yin, Y. A Method of Anchor Radius Pattern Recognition Based on Data Mining. Ship Ocean. Eng. 2017, 46, 206–209. [Google Scholar]
- Huang, S.Y.; Hsu, W.J.; He, Y. Assessing capacity and improving utilization of anchorages. Transp. Res. Part E Logist. Transp. Rev. 2011, 47, 216–227. [Google Scholar] [CrossRef]
- Wen, Y.; Lei, D.; Wang, L.; Xiao, C.; Zhou, C. Quantitative Model for Determining the Safety Distance of Anchoring LNG Carriers. J. Saf. Environ. 2015, 15, 134–139. [Google Scholar]
- Li, Y.; Zhang, W.; Cao, H.; Ning, Z. Fixed-Point Mooring Scheme of Yeyashan Anchorage in Ningbo Zhoushan Core Port Area. Mar. Technol. 2017, 4, 1–4. [Google Scholar]
- Chen, S.; Zhang, J.; Zhan, R. R2FA-Det: Delving into High-Quality Rotatable Boxes for Ship Detection in SAR Images. Remote Sens. 2020, 12, 2031. [Google Scholar] [CrossRef]
- Liu, T.; Pang, B.; Ai, S.; Sun, X. Study on Visual Detection Algorithm of Sea Surface Targets Based on Improved YOLOv3. Sensors 2020, 20, 7263. [Google Scholar] [CrossRef]
- Li, X.; Zhang, S.; Wang, Y. Application of Artificial Intelligence System in Detection of Marine Anchorage area. Ship Sci. Technol. 2019, 41, 64–66. [Google Scholar]
- Deng, B. Research on Capacity of Anchorage Based on Monte Carlo Algorithm; Dalian Maritime University: Dalian, China, 2012. [Google Scholar]
- Xue, T. Reliability Computation Method and Redundancy Optimization of Port Anchorage Capacity; Dalian University of Technology: Dalian, China, 2018. [Google Scholar]
- Mo, T. Design Code of General Layout for Sea Ports; China Communication Press Co., Ltd.: Beijing, China, 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standards | Conditions | Anchoring Conditions | The Length of Outgoing Chain |
|---|---|---|---|
| Chinese (General ship) | Wind Force ≤ 7 (Beaufort) | 3H + 90 | |
| Wind Force > 7 (Beaufort) | 4H + 145 | ||
| Japanese, British | Offshore/Onshore Waiting or Loading and Unloading Cargoes | Good Anchor Gripping Conditions | 6H |
| Bad Anchor Gripping Conditions | 6H + 30 | ||
| Anchoring in Storms | Wind Speed 20 m/s | 3H + 90 | |
| Wind Speed 30 m/s | 4H + 145 | ||
| Dindar Oz |
| Ls | B | DA | LSA | k | dF | CB | |
|---|---|---|---|---|---|---|---|
| Ship No. 1 | 192 | 22.6 | 18 | 8 | 8 | 6.5 | 0.809 |
| Ship No. 2 | 225 | 32 | 25 | 10 | 12 | 7.5 | 0.823 |
| Ship No. 3 | 333 | 60 | 30 | 12 | 17 | 10 | 0.834 |
| Models | Standards | R |
|---|---|---|
| A | Chinese | |
| B | ||
| C | Japanese and British | |
| D | ||
| A | ||
| B | ||
| E | Dindar Oz | |
| F | Improved Model in this study | |
| G | ||
| H | ||
| I |
| No. | The Length of Ship No.1 | The Length of Outgoing Chain | Safety Radius | The Length of Ship No.2 | The Length of Outgoing Chain | Safety Radius | Safety Distance |
|---|---|---|---|---|---|---|---|
| 1 | 192 | 150 | 367.7 | 192 | 150 | 367.7 | 735.3 |
| 2 | 333 | 150 | 561.5 | 192 | 150 | 367.7 | 929.2 |
| 3 | 192 | 150 | 367.7 | 225 | 150 | 410.8 | 778.4 |
| 4 | 225 | 150 | 410.8 | 225 | 150 | 410.8 | 821.5 |
| 5 | 333 | 150 | 561.5 | 225 | 150 | 410.8 | 972.3 |
| 6 | 333 | 150 | 561.5 | 333 | 150 | 561.5 | 1123.1 |
| No. | The Length of Ship No.1 | The Length of Outgoing Chain | Safety Radius | The Length of Ship No.2 | The Length of Outgoing Chain | Safety Radius | Safety Distance (m) |
|---|---|---|---|---|---|---|---|
| 1 | 192 | 150 | 443.9 | 192 | 150 | 443.9 | 887.8 |
| 2 | 333 | 150 | 639.0 | 192 | 150 | 443.9 | 1082.9 |
| 3 | 192 | 150 | 443.9 | 225 | 150 | 487.7 | 931.6 |
| 4 | 225 | 150 | 487.7 | 225 | 150 | 487.7 | 975.3 |
| 5 | 333 | 150 | 639.0 | 225 | 150 | 487.7 | 1126.7 |
| 6 | 333 | 150 | 639.0 | 333 | 150 | 639.0 | 1278.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, L.; Wang, X.; Zhang, W.; Gao, L.; Xie, S.; Liu, Z. Research on Intelligent Detection Algorithm of the Single Anchored Mooring Area for Maritime Autonomous Surface Ships. Appl. Sci. 2022, 12, 6009. https://doi.org/10.3390/app12126009
Cao L, Wang X, Zhang W, Gao L, Xie S, Liu Z. Research on Intelligent Detection Algorithm of the Single Anchored Mooring Area for Maritime Autonomous Surface Ships. Applied Sciences. 2022; 12(12):6009. https://doi.org/10.3390/app12126009
Chicago/Turabian StyleCao, Liang, Xinjian Wang, Wenjun Zhang, Ligang Gao, Si Xie, and Zhengjiang Liu. 2022. "Research on Intelligent Detection Algorithm of the Single Anchored Mooring Area for Maritime Autonomous Surface Ships" Applied Sciences 12, no. 12: 6009. https://doi.org/10.3390/app12126009
APA StyleCao, L., Wang, X., Zhang, W., Gao, L., Xie, S., & Liu, Z. (2022). Research on Intelligent Detection Algorithm of the Single Anchored Mooring Area for Maritime Autonomous Surface Ships. Applied Sciences, 12(12), 6009. https://doi.org/10.3390/app12126009