
Dual-Boost Inverter for PV Microinverter Application—An Assessment of Control Strategies

 , , ,
, , ,  ,
,  and
and
Abstract
:1. Introduction
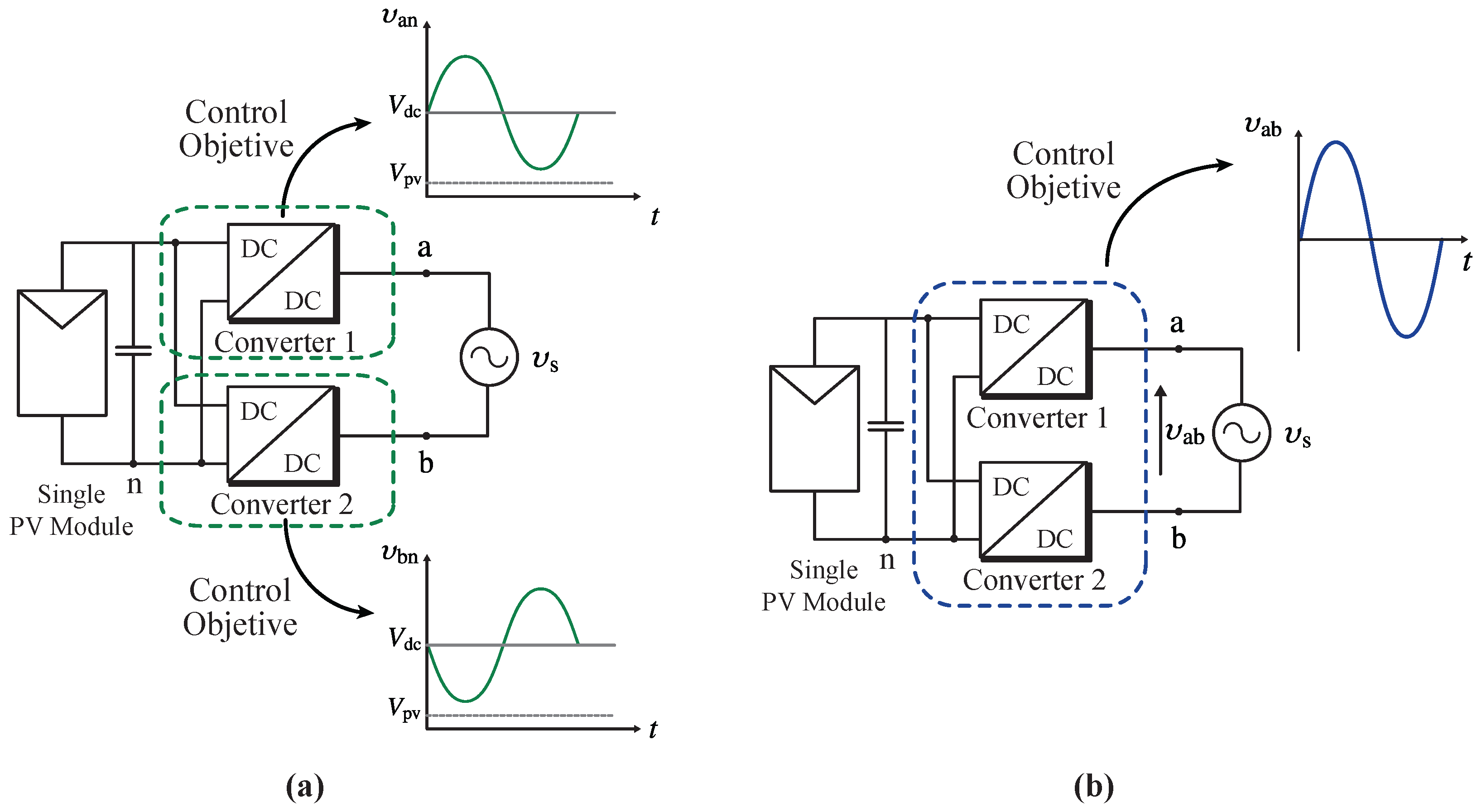
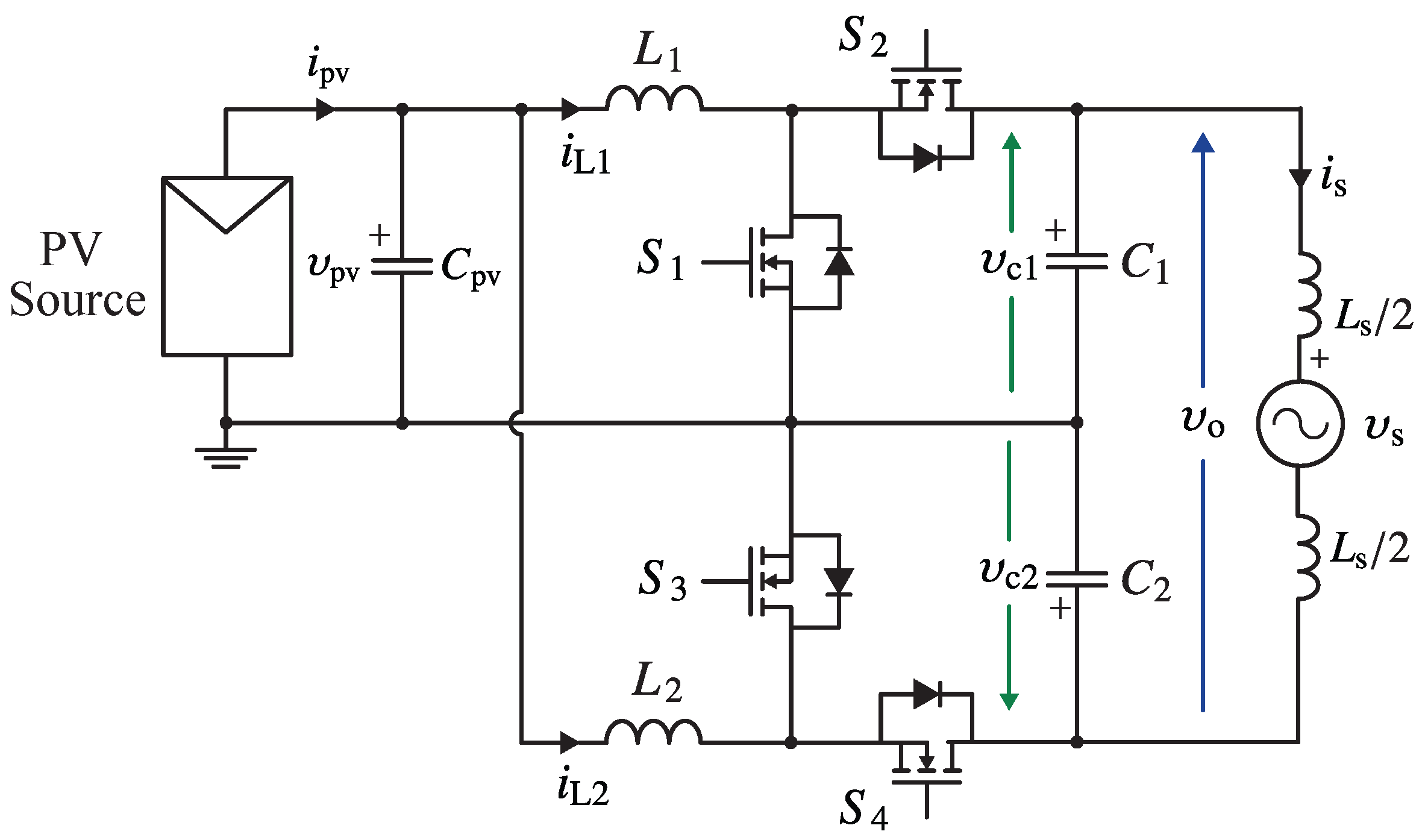
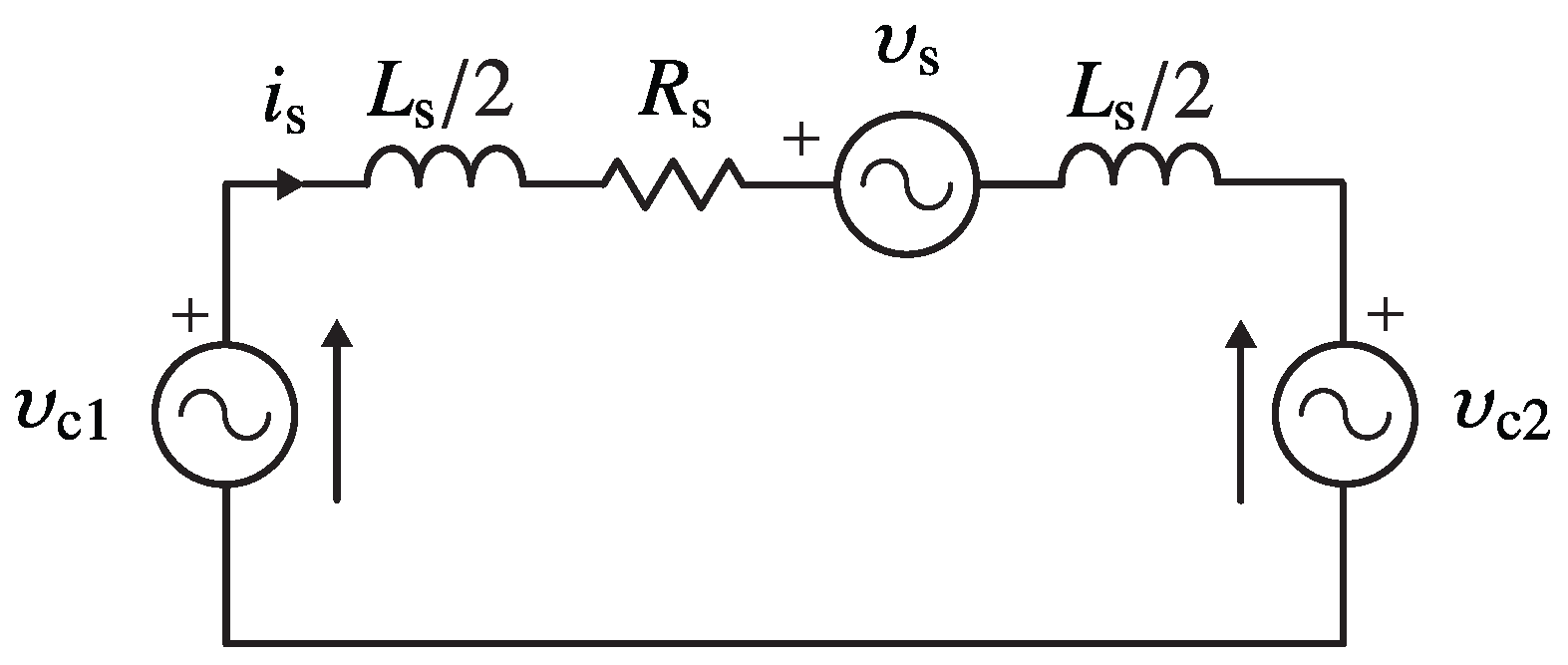
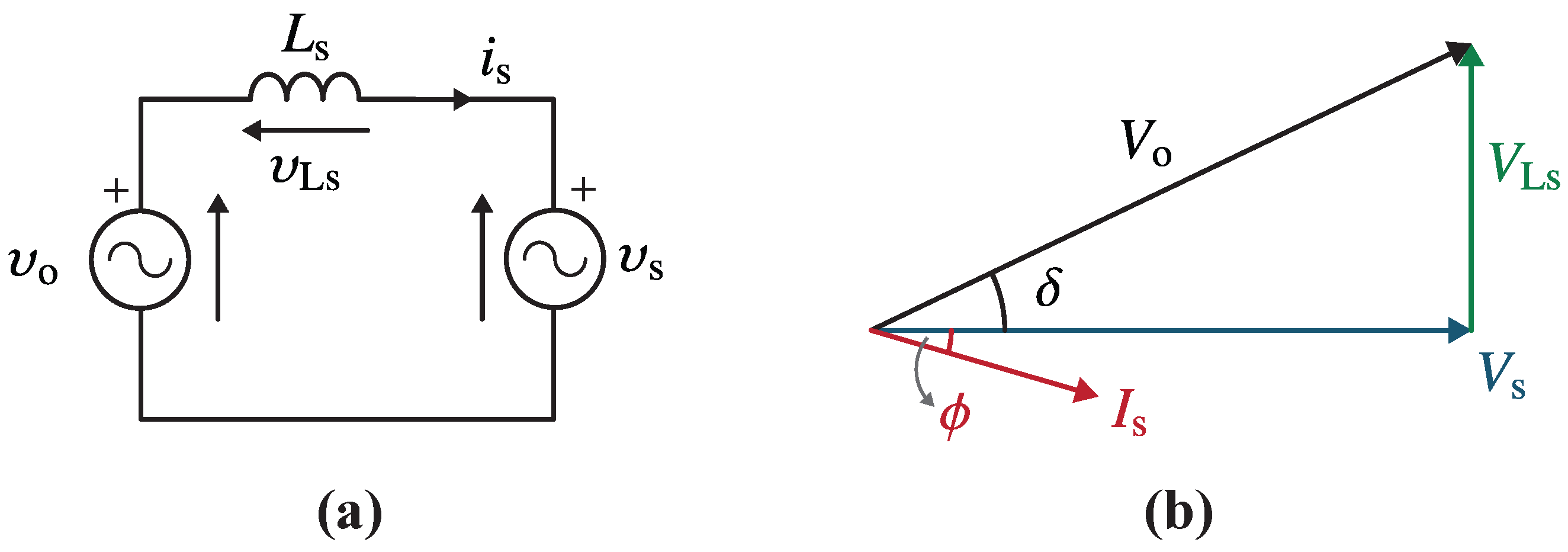
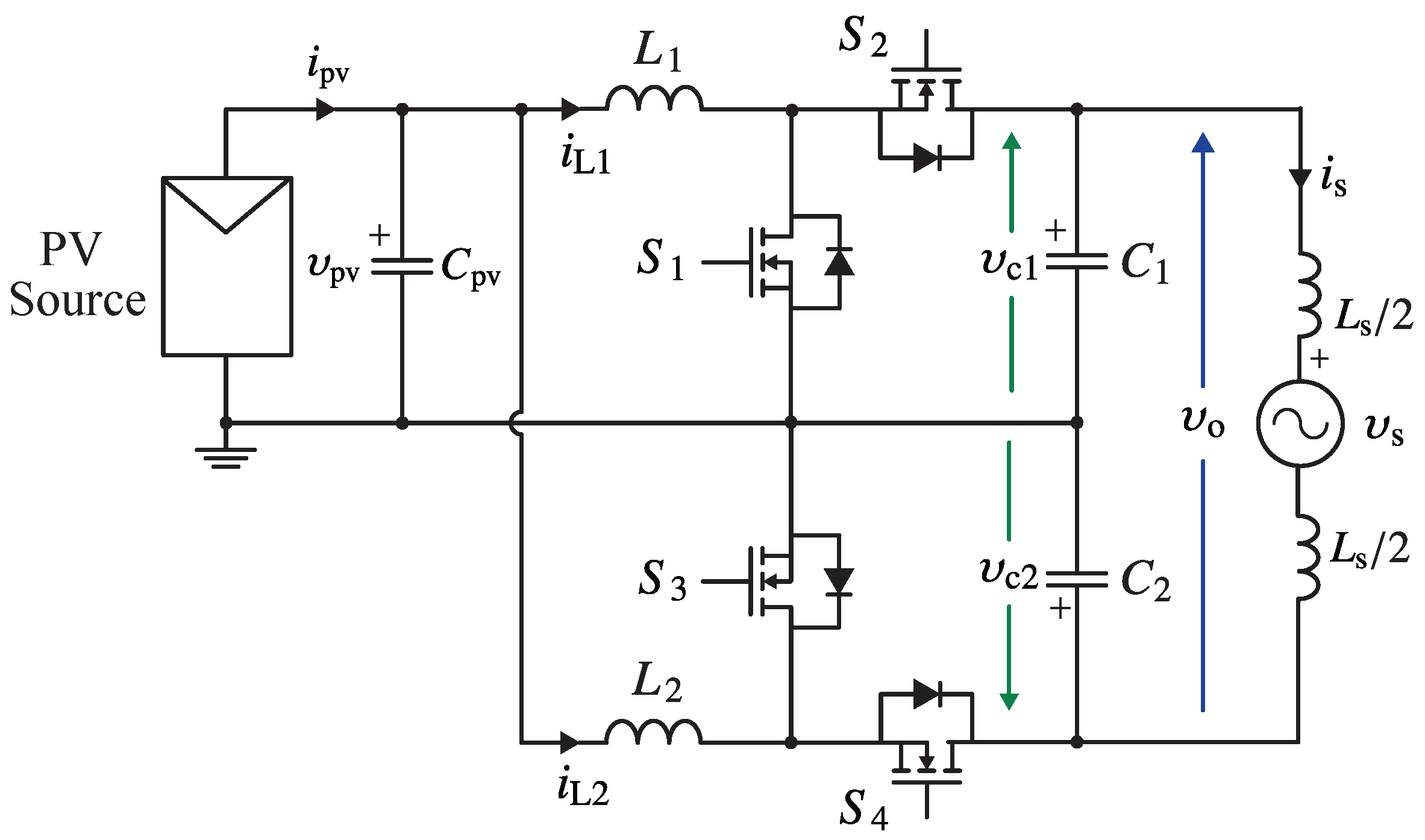
2. Operation and Modeling of the DBI
2.1. Individual Boost Converter Switching Strategy
2.2. Global Switching Strategy
3. Control Strategies of the DBI
3.1. Selected Control Strategies
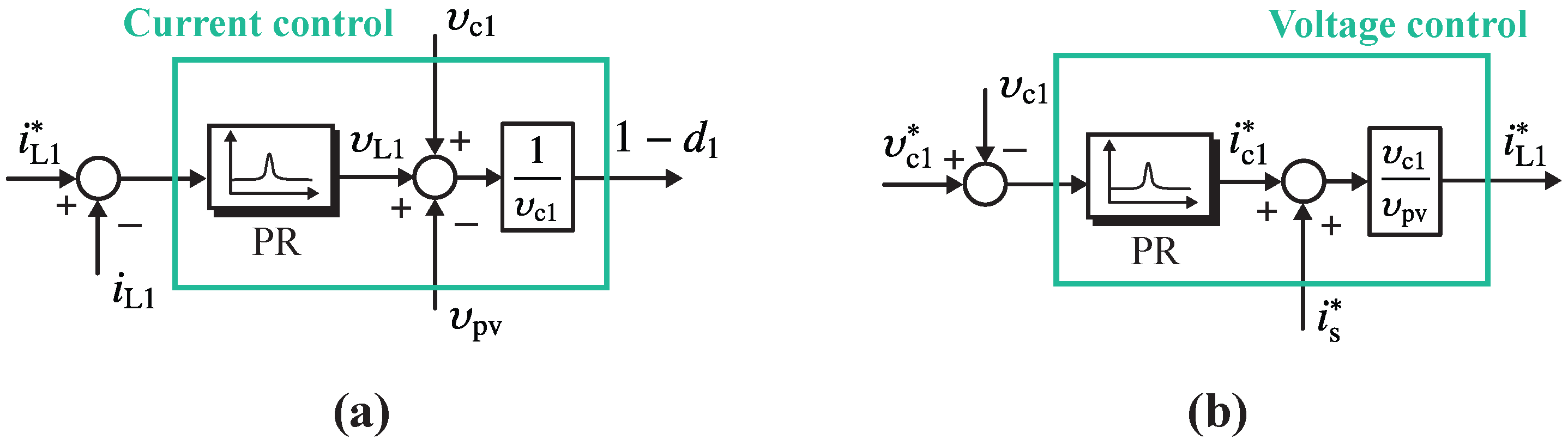
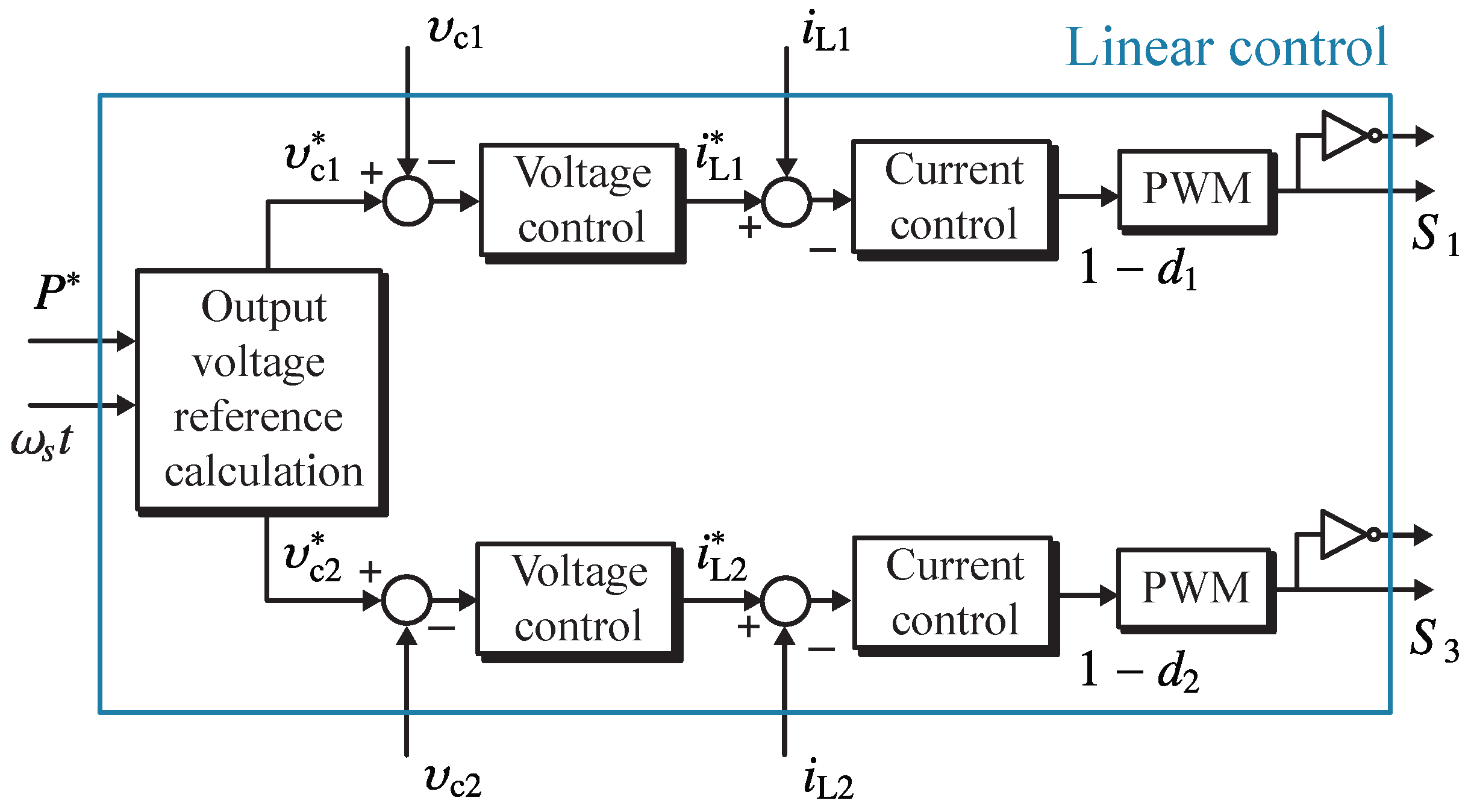
3.2. Linear Control
3.3. Non-Linear Controls
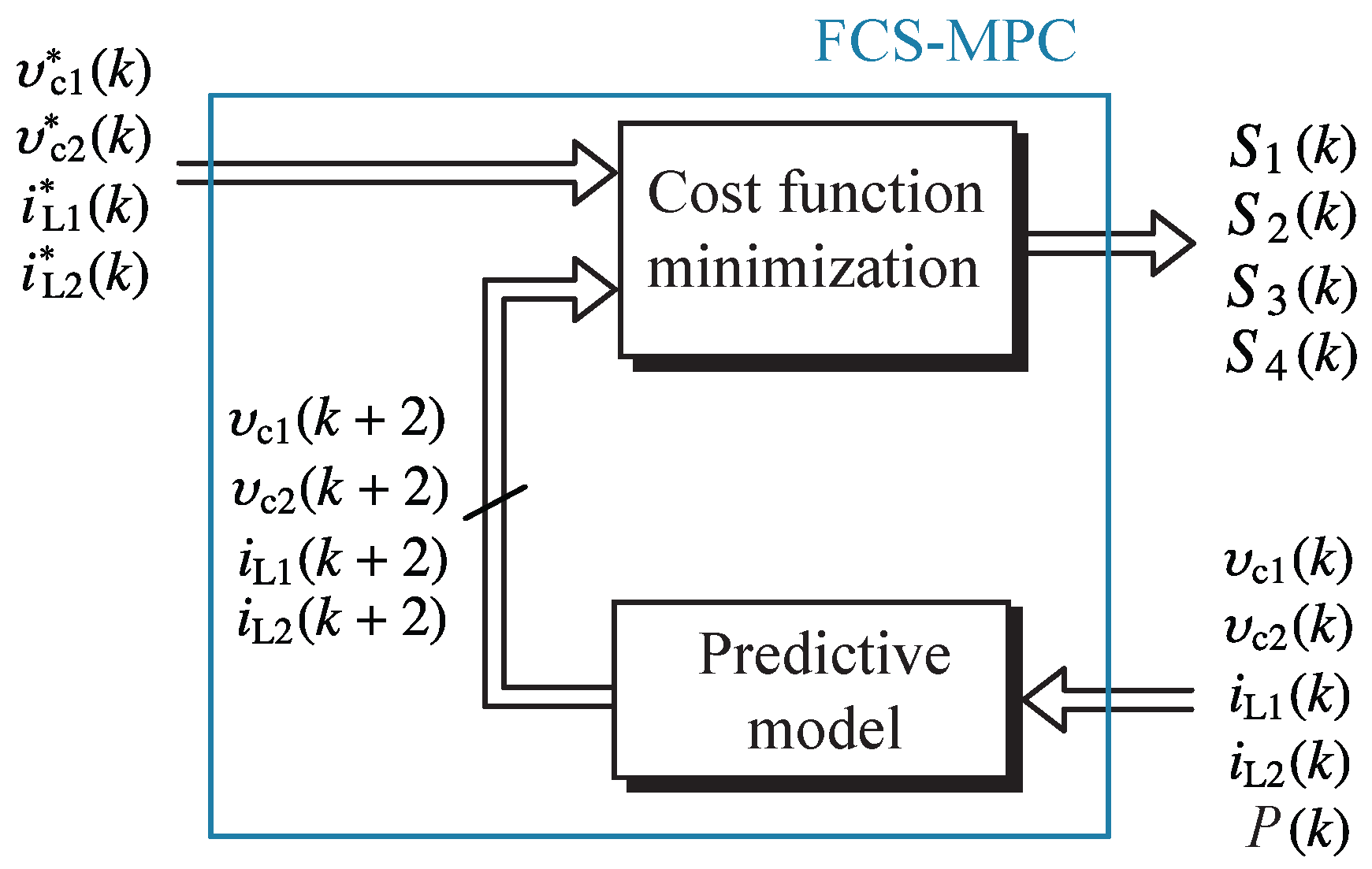
3.3.1. Finite Control Set–Model Predictive Control
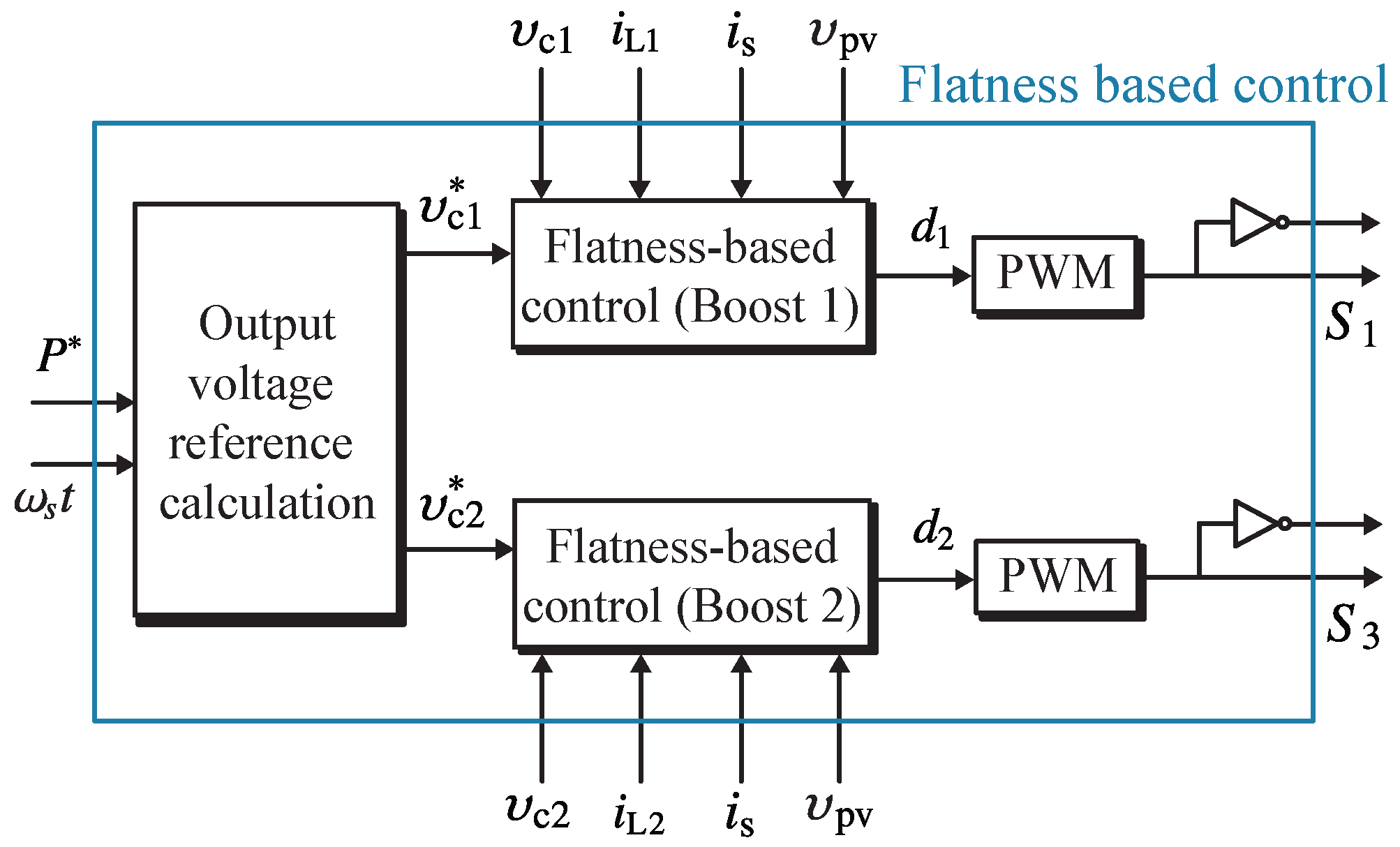
3.3.2. Flatness-Based Control
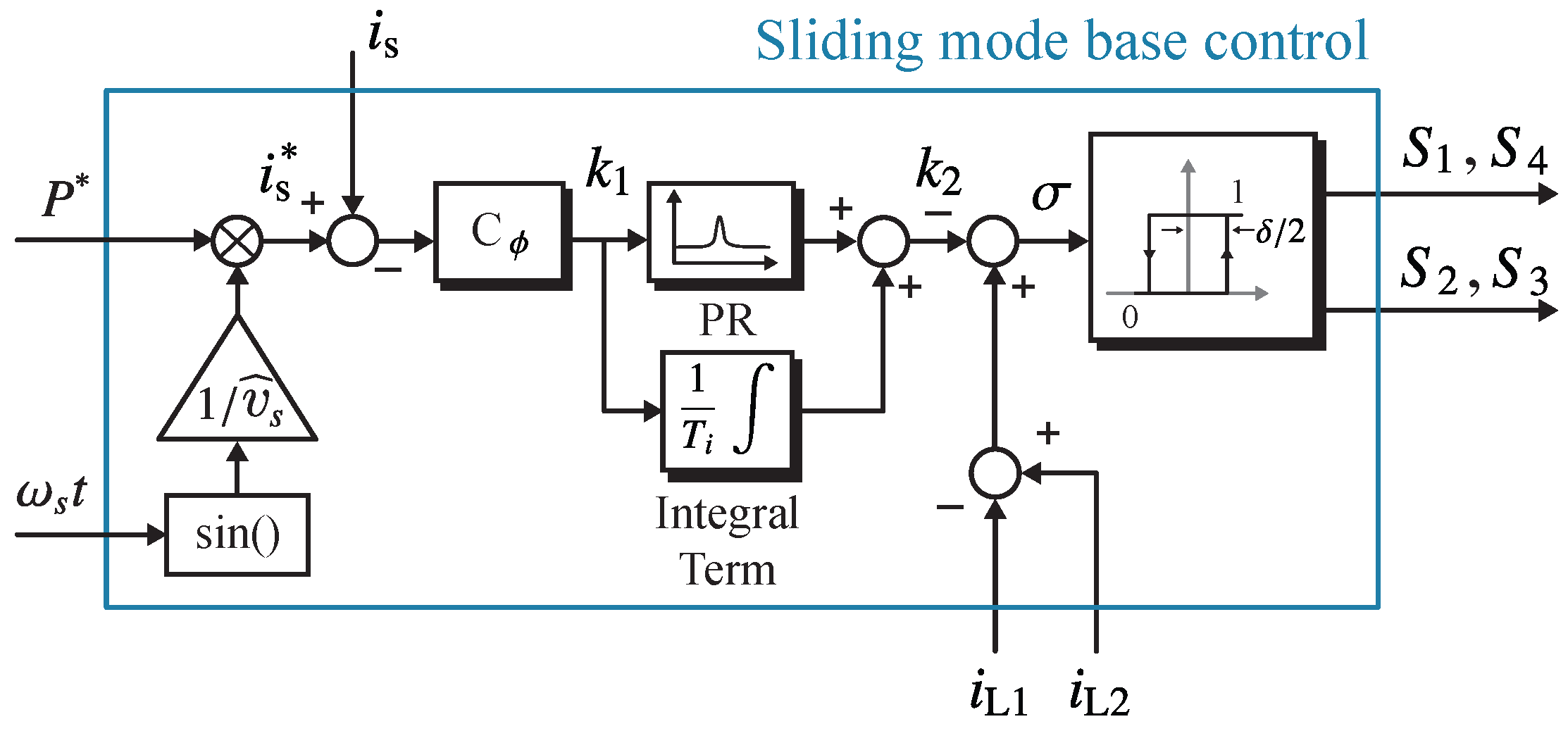
3.3.3. Sliding-Mode-Based Control
4. Control Strategies Comparison
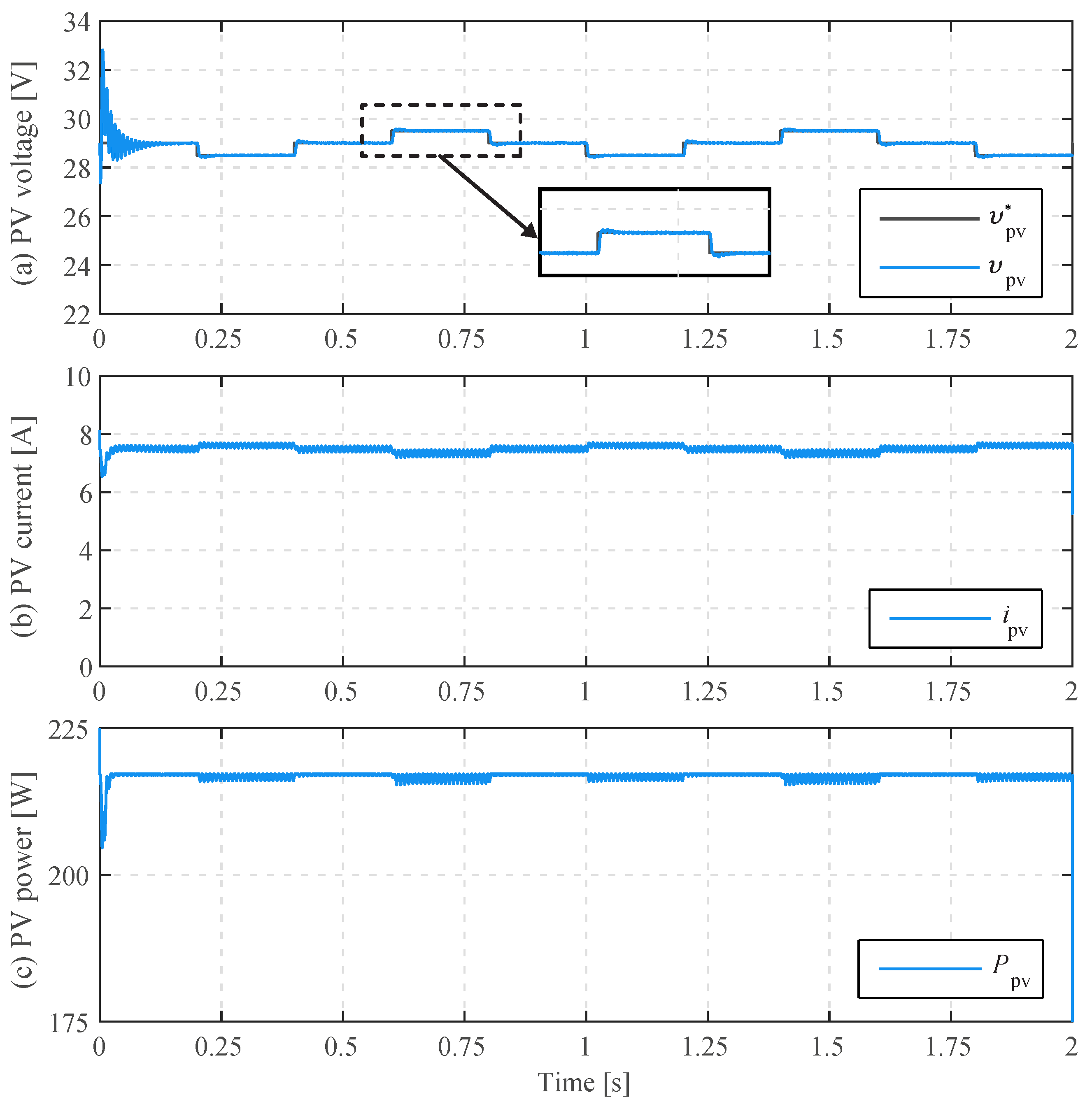
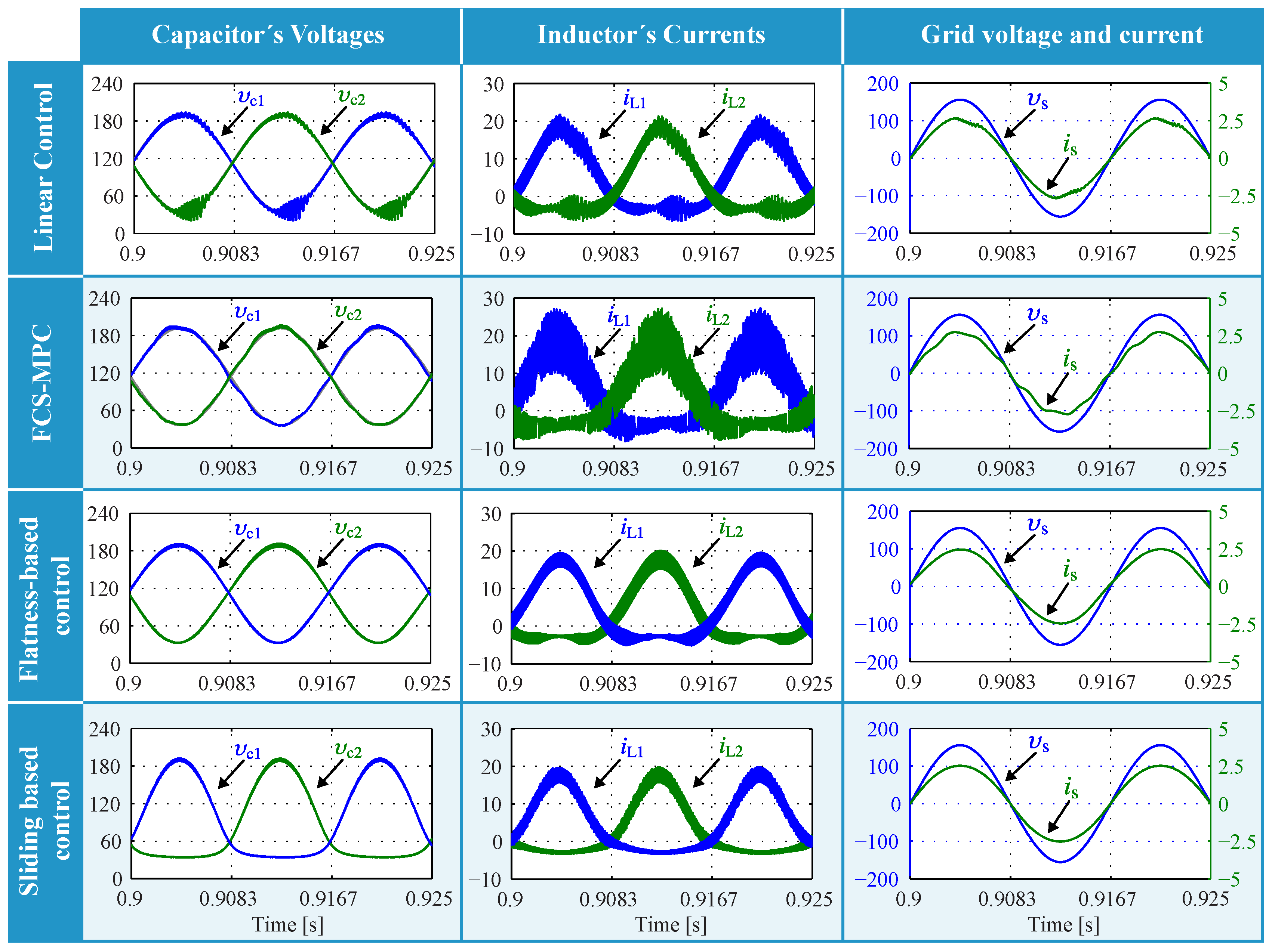
4.1. Steady-State Results
4.2. Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Research and Markets. Global Solar Microinverter Market. 2021. Available online: https://www.researchandmarkets.com/reports/5235685/global-solar-microinverter-market-by-type (accessed on 15 March 2022).
- Jain, S.; Agarwal, V. A Single-Stage Grid Connected Inverter Topology for Solar PV Systems With Maximum Power Point Tracking. IEEE Trans. Power Electron. 2007, 22, 1928–1940. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Wolfs, P. A Review of the Single Phase Photovoltaic Module Integrated Converter Topologies With Three Different DC Link Configurations. IEEE Trans. Power Electron. 2008, 23, 1320–1333. [Google Scholar] [CrossRef] [Green Version]
- Meneses, D.; Blaabjerg, F.; Garcia, O.; Cobos, J.A. Review and Comparison of Step-Up Transformerless Topologies for Photovoltaic AC-Module Application. IEEE Trans. Power Electron. 2013, 28, 2649–2663. [Google Scholar] [CrossRef] [Green Version]
- Alluhaybi, K.; Batarseh, I.; Hu, H. Comprehensive Review and Comparison of Single-Phase Grid-Tied Photovoltaic Microinverters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1310–1329. [Google Scholar] [CrossRef]
- Caceres, R.; Barbi, I. A boost DC-AC converter: Operation, analysis, control and experimentation. In Proceedings of the IECON ’95-21st Annual Conference on IEEE Industrial Electronics, Orlando, FL, USA, 6–10 November 1995; Volume 1, pp. 546–551. [Google Scholar] [CrossRef]
- Sanchis, P.; Ursaea, A.; Gubia, E.; Marroyo, L. Boost DC-AC inverter: A new control strategy. IEEE Trans. Power Electron. 2005, 20, 343–353. [Google Scholar] [CrossRef]
- Jang, M.; Agelidis, V.G. A Minimum Power-Processing-Stage Fuel-Cell Energy System Based on a Boost-Inverter With a Bidirectional Backup Battery Storage. IEEE Trans. Power Electron. 2011, 26, 1568–1577. [Google Scholar] [CrossRef]
- Zhu, G.; Tan, S.; Chen, Y.; Tse, C.K. Mitigation of Low-Frequency Current Ripple in Fuel-Cell Inverter Systems Through Waveform Control. IEEE Trans. Power Electron. 2013, 28, 779–792. [Google Scholar] [CrossRef] [Green Version]
- Jang, M.; Ciobotaru, M.; Agelidis, V.G. A Single-Phase Grid-Connected Fuel Cell System Based on a Boost-Inverter. IEEE Trans. Power Electron. 2013, 28, 279–288. [Google Scholar] [CrossRef]
- Abeywardana, D.B.W.; Hredzak, B.; Agelidis, V.G. A Rule-Based Controller to Mitigate DC-Side Second-Order Harmonic Current in a Single-Phase Boost Inverter. IEEE Trans. Power Electron. 2016, 31, 1665–1679. [Google Scholar] [CrossRef]
- Caceres, R.O.; Barbi, I. A boost DC-AC converter: Analysis, design, and experimentation. IEEE Trans. Power Electron. 1999, 14, 134–141. [Google Scholar] [CrossRef]
- Jha, K.; Mishra, S.; Joshi, A. High-Quality Sine Wave Generation Using a Differential Boost Inverter at Higher Operating Frequency. IEEE Trans. Ind. Appl. 2015, 51, 373–384. [Google Scholar] [CrossRef]
- Renaudineau, H.; Lopez, D.; Flores-Bahamonde, F.; Kouro, S. Flatness-based control of a boost inverter for PV microinverter application. In Proceedings of the 2017 IEEE 8th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Florianopolis, Brazil, 17–20 April 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Lopez, D.; Flores-Bahamonde, F.; Kouro, S.; Perez, M.A.; Llor, A.; Martínez-Salamero, L. Predictive control of a single-stage boost DC-AC photovoltaic microinverter. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6746–6751. [Google Scholar] [CrossRef]
- Cortes, D.; Vazquez, N.; Alvarez-Gallegos, J. Dynamical Sliding-Mode Control of the Boost Inverter. IEEE Trans. Ind. Electron. 2009, 56, 3467–3476. [Google Scholar] [CrossRef]
- Flores-Bahamonde, F.; Valderrama-Blavi, H.; Bosque-Moncusi, J.M.; García, G.; Martínez-Salamero, L. Using the sliding-mode control approach for analysis and design of the boost inverter. IET Power Electron. 2016, 9, 1625–1634. [Google Scholar] [CrossRef]
- Lopez-Caiza, D.; Flores-Bahamonde, F.; Kouro, S.; Santana, V.; Müller, N.; Chub, A. Sliding Mode Based Control of Dual Boost Inverter for Grid Connection. Energies 2019, 12, 4241. [Google Scholar] [CrossRef] [Green Version]
- El Aroudi, A.; Haroun, R.; Al-Numay, M.; Huang, M. Multiple-Loop Control Design for a Single-Stage PV-Fed Grid-Tied Differential Boost Inverter. Appl. Sci. 2020, 10, 4808. [Google Scholar] [CrossRef]
- Abeywardana, D.B.W.; Hredzak, B.; Agelidis, V.G. An Input Current Feedback Method to Mitigate the DC-Side Low-Frequency Ripple Current in a Single-Phase Boost Inverter. IEEE Trans. Power Electron. 2016, 31, 4594–4603. [Google Scholar] [CrossRef]
- Huang, S.; Tang, F.; Xin, Z.; Xiao, Q.; Loh, P.C. Grid-Current Control of a Differential Boost Inverter With Hidden LCL Filters. IEEE Trans. Power Electron. 2019, 34, 889–903. [Google Scholar] [CrossRef]
- Chen, W.L.; Yang, C.H.; Lin, C.T.; Xu, M.S.; Chen, K.F. Voltage Modulation and Current Control of Boost Inverters for Stand-Alone or Grid-Tied Operation. IEEE Trans. Power Electron. 2020, 35, 8726–8736. [Google Scholar] [CrossRef]
- Sanchis Gurpide, P.; Alonso Sadaba, O.; Marroyo Palomo, L.; Meynard, T.; Lefeuvre, E. A new control strategy for the boost DC-AC inverter. In Proceedings of the 2001 IEEE 32nd Annual Power Electronics Specialists Conference (IEEE Cat. No.01CH37230), Vancouver, BC, Canada, 17–21 June 2001; Volume 2, pp. 974–979. [Google Scholar]
- Kouro, S.; Perez, M.A.; Rodriguez, J.; Llor, A.M.; Young, H.A. Model Predictive Control: MPC’s Role in the Evolution of Power Electronics. IEEE Ind. Electron. Mag. 2015, 9, 8–21. [Google Scholar] [CrossRef]
- Kouro, S.; Wu, B.; Abu-Rub, H.; Blaabjerg, F. Photovoltaic energy conversion systems. In Power Electronics for Renewable Energy Systems, Transportation and Industrial Applications; John Wiley & Sons: Hoboken, NJ, USA, 2014; pp. 160–198. [Google Scholar]
- Wang, L. PID Control System Design and Automatic Tuning Using MATLAB/Simulink; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; p. 29. [Google Scholar]
- Bouneb, B.; Grant, D.M.; Cruden, A.; McDonald, J.R. Grid connected inverter suitable for economic residential fuel cell operation. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; p. 10. [Google Scholar]
- Renaudineau, H. Hybrid Renewable Energy Sourced System: Energy Management & Self-Diagnosis. Ph.D. Thesis, Université de Lorraine, Nancy, France, 2013. [Google Scholar]
- Soheil-Hamedani, M.; Zandi, M.; Gavagsaz-Ghoachani, R.; Nahid-Mobarakeh, B.; Pierfederici, S. Flatness-based control method: A review of its applications to power systems. In Proceedings of the 2016 7th Power Electronics and Drive Systems Technologies Conference (PEDSTC), Tehran, Iran, 16–18 February 2016; pp. 547–552. [Google Scholar] [CrossRef]
- Gensior, A.; Woywode, O.; Rudolph, J.; Guldner, H. On Differential Flatness, Trajectory Planning, Observers, and Stabilization for DC–DC Converters. IEEE Trans. Circuits Syst. I Regul. Pap. 2006, 53, 2000–2010. [Google Scholar] [CrossRef]
- Rodríguez, P.; Luna, A.; Muñoz-Aguilar, R.S.; Etxeberria-Otadui, I.; Teodorescu, R.; Blaabjerg, F. A Stationary Reference Frame Grid Synchronization System for Three-Phase Grid-Connected Power Converters Under Adverse Grid Conditions. IEEE Trans. Power Electron. 2012, 27, 99–112. [Google Scholar] [CrossRef]
- Aguirre, M.; Kouro, S.; Rojas, C.A.; Rodriguez, J.; Leon, J.I. Switching Frequency Regulation for FCS–MPC Based on a Period Control Approach. IEEE Trans. Ind. Electron. 2018, 65, 5764–5773. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T. Guidelines for the Design of Finite Control Set Model Predictive Controllers. IEEE Trans. Power Electron. 2020, 35, 7434–7450. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Load | Control Strategy | Control Objectives—Surface | Ref. | |
|---|---|---|---|---|
| 1st family | R and non-linear load | Linear control (PIs) | Capacitor voltage and inductor current | [7,8] |
| R and RC | Linear control (PIs) | Capacitor voltage and inductor current | [9] | |
| Grid-connection | Linear control (PRs) | Capacitor voltage and inductor current | [10] | |
| Grid-connection | Linear control (PR+PI) | Capacitor voltage and inductor current | [11] | |
| R, L, and non-linear load | Sliding mode control | [12] | ||
| Resistance | Dynamic linearizing modulator | Capacitor voltage | [13] | |
| Grid-connection | Flatness-based control | Energy stored in capacitors and inductors | [14] | |
| Grid-connection | Finite control set—MPC | Capacitor voltage and inductor current | [15] | |
| 2nd family | R and non-linear | Sliding mode control | [16] | |
| Resistance | Sliding mode control | [17] | ||
| Grid-connection | Sliding mode control | [18,19] |
| Switching State | Conduction State | Output Current | Inductor Currents | ||||
|---|---|---|---|---|---|---|---|
| 1 | 0 | 1 | 1 | 0 | 1 | , | |
| 2 | |||||||
| 2 | 0 | 1 | 0 | 1 | 3 | , | |
| 4 | |||||||
| 3 | 1 | 0 | 1 | 0 | 5 | , | |
| 6 | |||||||
| 4 | 1 | 0 | 0 | 1 | 7 | , | |
| 8 |
| Symbol | Parameter | Value |
|---|---|---|
| PV Parameters | ||
| PV voltage at MPP | 29 V | |
| PV power | 216 W | |
| Input capacitor | 25 mF | |
| Grid Parameters | ||
| Grid voltage | 110 | |
| Grid frequency | 60 Hz | |
| Grid filter inductance | 10 mH | |
| Converter Parameters | ||
| , | Boost converters’ inductors | 55 H |
| , | Boost converters’ capacitors | 5 F |
| Parameters | Linear Control | FCS–MPC | Flatness-Based Control | Sliding Mode Control |
|---|---|---|---|---|
| Total number of control loops | 5 | 2 | 3 | 3 |
| Total number of measured variables | 7 | 7 | 7 | 5 |
| Averaged switching frequency | 79,060 Hz | 79,140 Hz | 79,980 Hz | 85,680 Hz |
| Ripple of inductor currents | 5.2 A | 9.94 A | 5.23 A | 5.10 A |
| THD | 3.85% | 3.58% | 2.59% | 2.48% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lopez-Caiza, D.; Renaudineau, H.; Muller, N.; Flores-Bahamonde, F.; Kouro, S.; Rodriguez, J. Dual-Boost Inverter for PV Microinverter Application—An Assessment of Control Strategies. Appl. Sci. 2022, 12, 5952. https://doi.org/10.3390/app12125952
Lopez-Caiza D, Renaudineau H, Muller N, Flores-Bahamonde F, Kouro S, Rodriguez J. Dual-Boost Inverter for PV Microinverter Application—An Assessment of Control Strategies. Applied Sciences. 2022; 12(12):5952. https://doi.org/10.3390/app12125952
Chicago/Turabian StyleLopez-Caiza, Diana, Hugues Renaudineau, Nicolas Muller, Freddy Flores-Bahamonde, Samir Kouro, and Jose Rodriguez. 2022. "Dual-Boost Inverter for PV Microinverter Application—An Assessment of Control Strategies" Applied Sciences 12, no. 12: 5952. https://doi.org/10.3390/app12125952