
Implementing Data-Driven Approach for Modelling Ultrasonic Wave Propagation Using Spatio-Temporal Deep Learning (SDL)



Abstract
:1. Introduction
2. Training Datasets Generation through Finite Element Simulation
2.1. Finite Element Modelling of Ultrasonic Wave Propagation in Solid Media
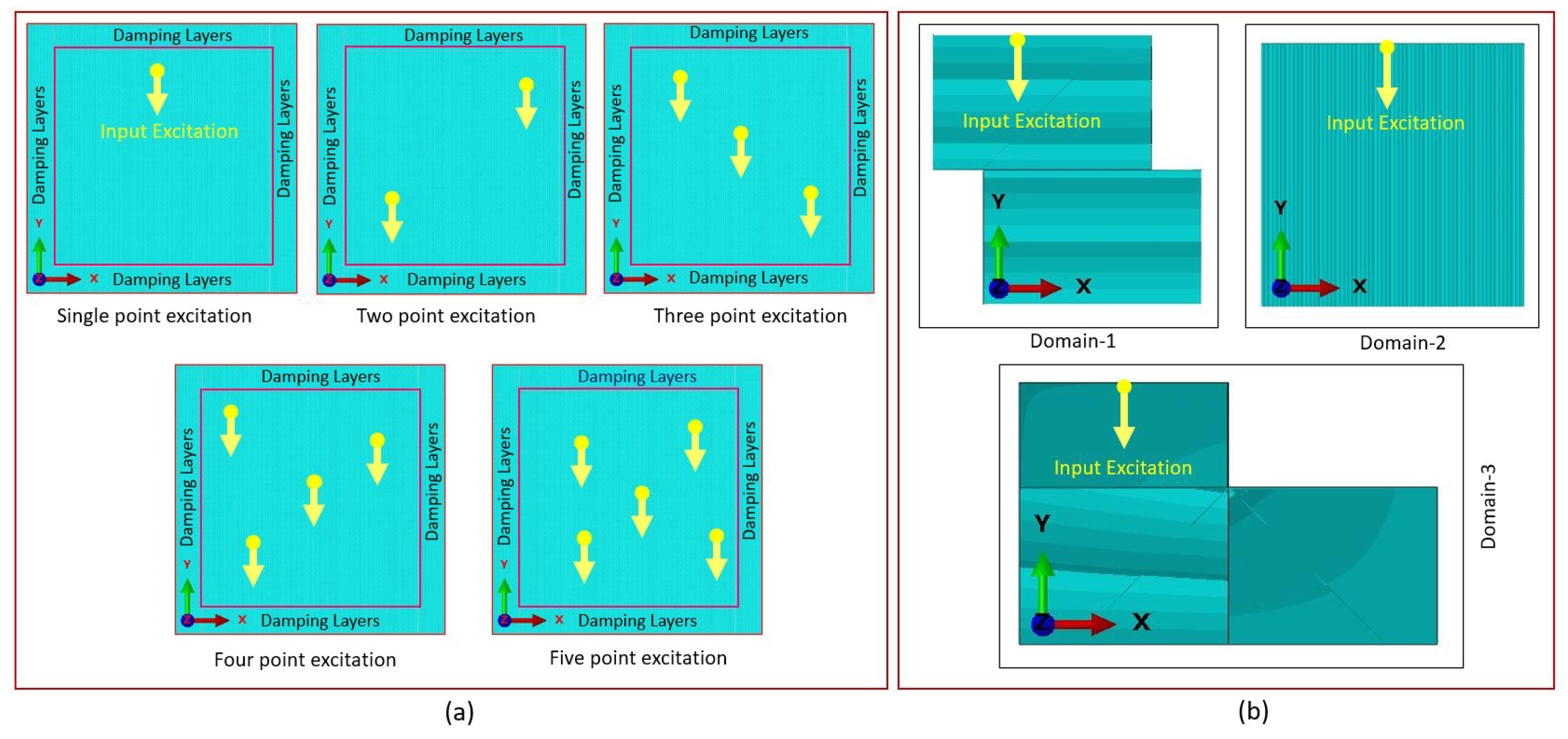
2.2. Type-1 Datasets Creation: Forward Wave Propagation Simulation
2.3. Type-2 Datasets Creation: Reflection Wave Propagation Simulation
3. The Formulation of Spatio-Temporal Deep Learning Model for Ultrasonic Wave Propagation
4. Results and Discussion
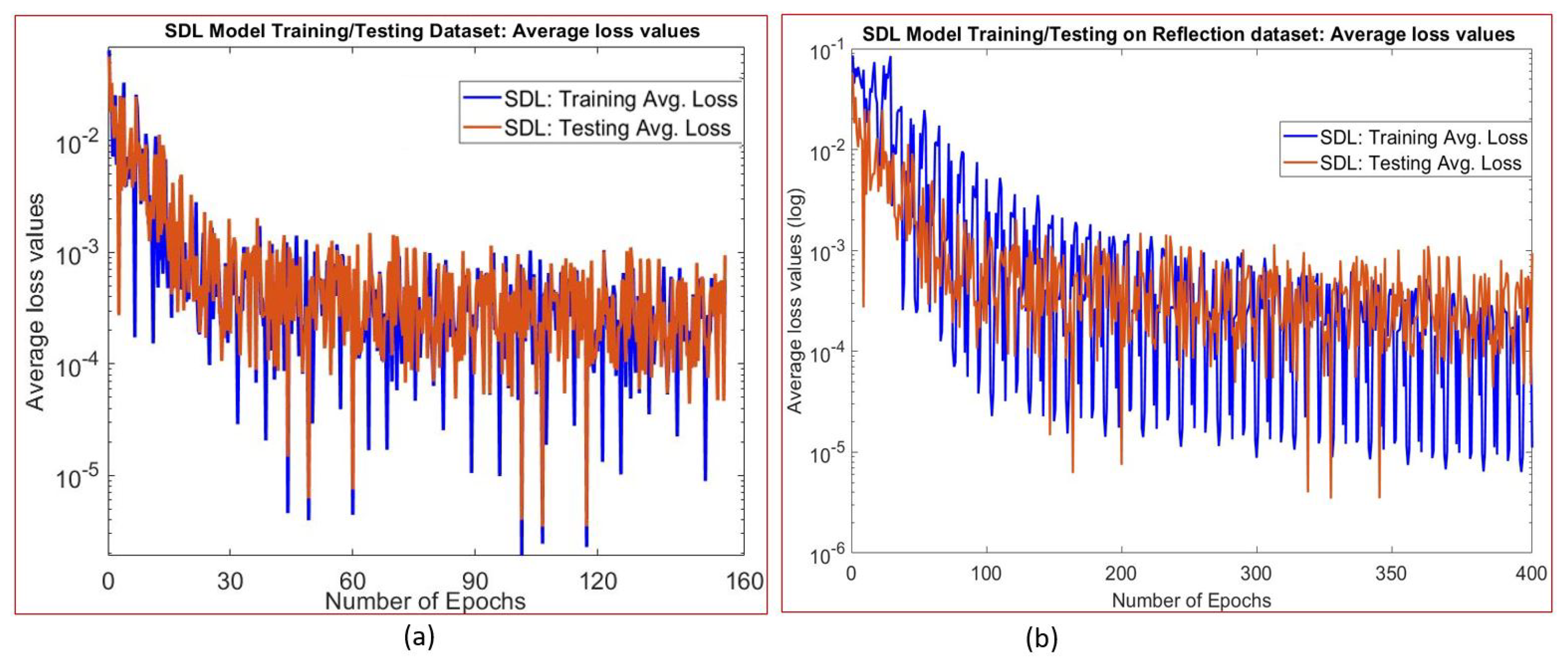
4.1. SDL Model Implementation on Type-1 Datasets: Forward Wave Propagation Simulation
4.1.1. Evaluation Metric
4.1.2. Ultrasonic Wave Propagation on Different Geometrical Domain Modelling
4.2. SDL Model Implementation on Datasets Type-2: Reflection Wave Propagation Simulation
4.2.1. Generalization to Different Geometrical Boundary Modelling: Reflected Wave Propagation from Boundaries
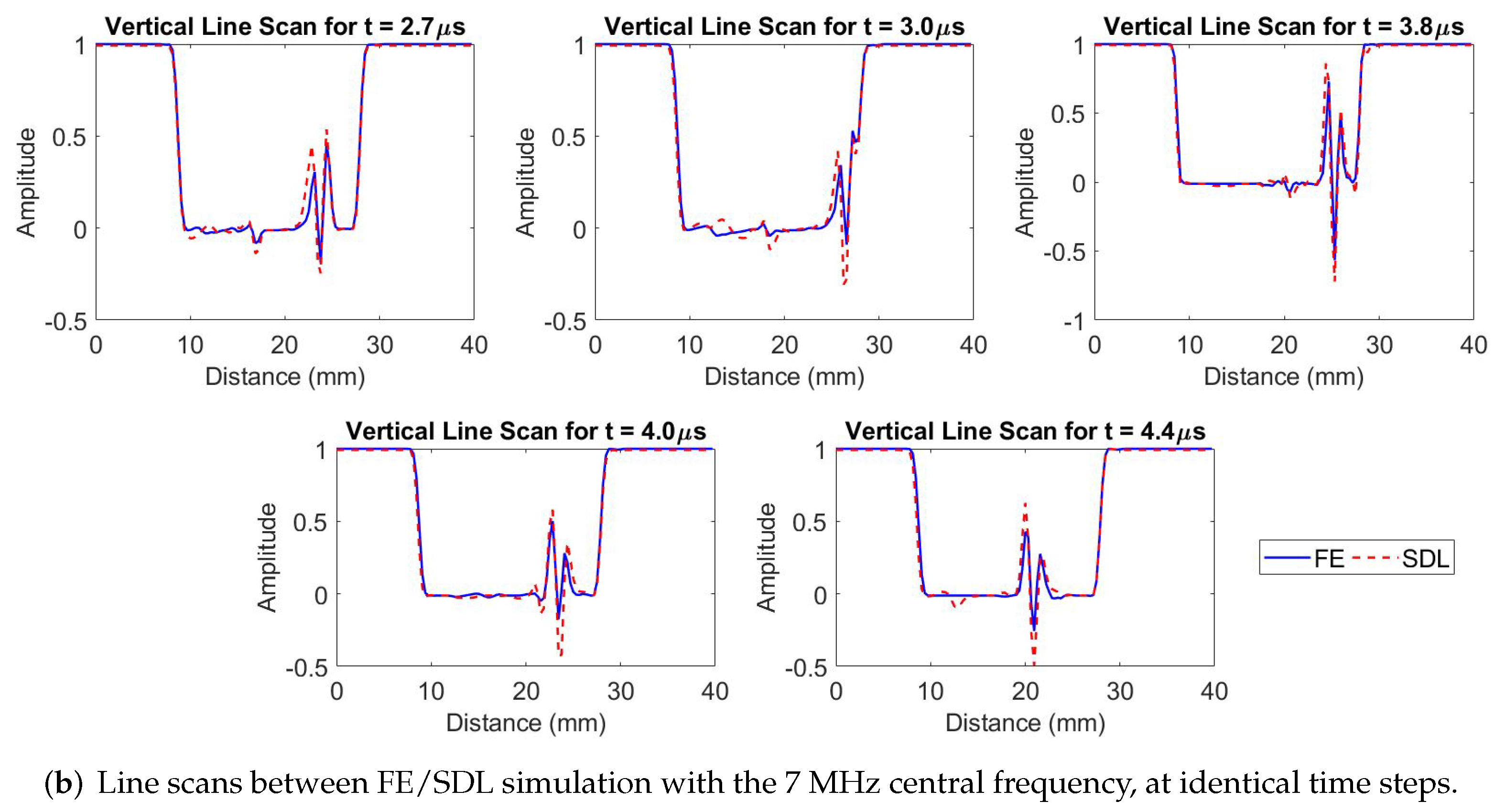
4.2.2. SDL Model Simulation for Reflected Wave Propagation with Varying Frequencies and Cycles
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, Y.C.; AlZoubi, A.; Jassim, S.; Jiang, Q.; Zhang, Y.; Wang, Y.B.; Ye, X.D.; Du, H. A generic deep learning framework to classify thyroid and breast lesions in ultrasound images. Ultrasonics 2021, 110, 106300. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Liu, E.; Chen, Y.; Wang, X.; Sun, C.; Tan, J. Study on Propagation Depth of Ultrasonic Longitudinal Critically Refracted (LCR) Wave. Sensors 2020, 20, 5724. [Google Scholar] [CrossRef] [PubMed]
- Gantala, T.; Balasubramaniam, K. Automated Defect Recognition for Welds Using Simulation Assisted TFM Imaging with Artificial Intelligence. J. Nondestruct. Eval. 2021, 40, 28. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.; Xu, F.; Jin, Y.Q. Target Classification Using the Deep Convolutional Networks for SAR Images. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 4806–4817. [Google Scholar] [CrossRef]
- Raja, N.; Balasubramaniam, K. Experimental Study on Dispersion Effects of F (1,1) Wave Mode on Thin Waveguide When Embedded with Fluid. Sensors 2021, 21, 322. [Google Scholar] [CrossRef]
- Nakahata, K.; Sugahara, H.; Barth, M.; Köhler, B.; Schubert, F. Three dimensional image-based simulation of ultrasonic wave propagation in polycrystalline metal using phase-field modeling. Ultrasonics 2016, 67, 18–29. [Google Scholar] [CrossRef]
- Guha, A.; Aynardi, M.; Shokouhi, P.; Lissenden, C.J. Shear-Actuation and Vibrometer Reception of Penetrating Ultrasonic Guided Wave Modes in Human Tibia. Appl. Sci. 2020, 10, 8397. [Google Scholar] [CrossRef]
- Moon, S.; Kang, T.; Han, S.; Kim, K.M.; Jin, H.H.; Kim, S.W.; Kim, M.; Seo, H. FEA-Based Ultrasonic Focusing Method in Anisotropic Media for Phased Array Systems. Appl. Sci. 2021, 11, 8888. [Google Scholar] [CrossRef]
- Shivaprasad, S.; Pandala, A.; Krishnamurthy, C.V.; Balasubramaniam, K. Wave localized finite-difference-time-domain modelling of scattering of elastic waves within a polycrystalline material. J. Acoust. Soc. Am. 2018, 144, 3313–3326. [Google Scholar] [CrossRef]
- Dutykh, D.; Katsaounis, T.; Mitsotakis, D. Finite volume schemes for dispersive wave propagation and runup. J. Comput. Phys. 2010, 230, 3035–3061. [Google Scholar] [CrossRef] [Green Version]
- Manidipa, D.; Ghosh, S.K. Data-Driven Approaches for Spatio-Temporal Analysis: A Survey of the State-of-the-Arts. J. Comput. Sci. Technol. 2020, 35, 665–696. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Connor, J.; Martin, R.; Atlas, L. Recurrent neural networks and robust time series prediction. IEEE Trans. Neural Netw. 1994, 5, 240–254. [Google Scholar] [CrossRef] [Green Version]
- Rautela, M.; Senthilnath, J.; Moll, J.; Gopalakrishnan, S. Combined two-level damage identification strategy using ultrasonic guided waves and physical knowledge assisted machine learning. Ultrasonics 2021, 115, 106451. [Google Scholar] [CrossRef]
- Srivastava, N.; Mansimov, E.; Salakhudinov, R. Unsupervised Learning of Video Representations using LSTMs. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015; Bach, F., Blei, D., Eds.; PMLR: Lille, France, 2015; Volume 37, pp. 843–852. [Google Scholar]
- Liu, F.; Shen, T.; Luo, Z.; Zhao, D.; Guo, S. Underwater target recognition using convolutional recurrent neural networks with 3-D Mel-spectrogram and data augmentation. Appl. Acoust. 2021, 178, 107989. [Google Scholar] [CrossRef]
- Liu, G.Y.; Kong, D.Y.; Hu, S.G.; Yu, Q.; Liu, Z.; Chen, T.P.; Yin, Y.; Hosaka, S.; Liu, Y. Smart electronic skin having gesture recognition function by LSTM neural network. Appl. Phys. Lett. 2018, 113, 084102. [Google Scholar] [CrossRef]
- Sorteberg, W.E.; Garasto, S.; Cantwell, C.C.; Bharath, A.A. Approximating the solution of surface wave propagation using deep neural networks. In Proceedings of the INNS Big Data And Deep Learning Conference, Sestri Levante, Italy, 18–19 April 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 246–256. [Google Scholar]
- Pan, P.; Chen, H.; Li, Y.; Cai, N.; Cheng, L.; Wang, S. Tumor segmentation in automated whole breast ultrasound using bidirectional LSTM neural network and attention mechanism. Ultrasonics 2021, 110, 106271. [Google Scholar] [CrossRef]
- Ahmed, S.; Kamal, U.; Hasan, M.K. DSWE-Net: A deep learning approach for shear wave elastography and lesion segmentation using single push acoustic radiation force. Ultrasonics 2021, 110, 106283. [Google Scholar] [CrossRef]
- Hughes, T.W.; Williamson, I.A.D.; Minkov, M.; Fan, S. Wave physics as an analog recurrent neural network. Sci. Adv. 2019, 5, Eaay6946. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.k.; Woo, W.c. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. Adv. Neural Inf. Process. Syst. 2015, 28, 802–810. [Google Scholar]
- Wang, Y.; Gao, Z.; Long, M.; Wang, J.; Philip, S.Y. Predrnn++: Towards a resolution of the deep-in-time dilemma in spatiotemporal predictive learning. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 5123–5132. [Google Scholar]
- Su, J.; Byeon, W.; Kossaifi, J.; Huang, F.; Kautz, J.; Anandkumar, A. Convolutional Tensor-Train LSTM for Spatio-temporal Learning. Adv. Neural Inf. Process. Syst. 2020, 33, 13714–13726. [Google Scholar]
- Gantala, T.; Balasubramaniam, K. DPAI: A Data-driven simulation-assisted-Physics learned AI model for transient ultrasonic wave propagation. Ultrasonics 2022, 121, 106671. [Google Scholar] [CrossRef] [PubMed]
- Valencia, M.L.; Cantwell, C.D.; Fotiadis, S.; Pignatelli, E.; Bharath, A.A. Simulating Surface Wave Dynamics with Convolutional Networks. arXiv 2020, arXiv:2012.00718. [Google Scholar]
- Fotiadis, S.; Pignatelli, E.; Valencia, M.L.; Cantwell, C.; Storkey, A.; Bharath, A.A. Comparing recurrent and convolutional neural networks for predicting wave propagation. arXiv 2020, arXiv:2002.08981. [Google Scholar]
- Raissi, M.; Perdikaris, P.; Karniadakis, G. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Shukla, K.; Di Leoni, P.C.; Blackshire, J.; Sparkman, D.; Karniadakis, G.E. Physics-informed neural network for ultrasound nondestructive quantification of surface breaking cracks. J. Nondestruct. Eval. 2020, 39, 1–20. [Google Scholar] [CrossRef]
- Noakoasteen, O.; Wang, S.; Peng, Z.; Christodoulou, C. Physics-Informed Deep Neural Networks for Transient Electromagnetic Analysis. IEEE Open J. Antennas Propag. 2020, 1, 404–412. [Google Scholar] [CrossRef]
- Rajagopal, P.; Drozdz, M.; Skelton, E.A.; Lowe, M.J.; Craster, R.V. On the use of absorbing layers to simulate the propagation of elastic waves in unbounded isotropic media using commercially available Finite Element packages. NDT E Int. 2012, 51, 30–40. [Google Scholar] [CrossRef]
- Yu, B.; Tola, K.D.; Lee, C.; Park, S. Improving the Ability of a Laser Ultrasonic Wave-Based Detection of Damage on the Curved Surface of a Pipe Using a Deep Learning Technique. Sensors 2021, 21, 7105. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line Scan | Datasets of Testing | MAE | RMSE | MAPE (%) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| and Different | Sequence of Images at | Sequence of Images at | Sequence of Images at | |||||||||||||
| Geometrical Domain | T-1 | T-2 | T-3 | T-4 | T-5 | T-1 | T-2 | T-3 | T-4 | T-5 | T-1 | T-2 | T-3 | T-4 | T-5 | |
| Amplitude | Geometry-1 | 0.00 | 0.02 | 0.05 | 0.04 | 0.04 | 0.05 | 0.12 | 0.14 | 0.20 | 0.24 | 9.50 | 25.2 | 30.6 | 75.6 | 92.7 |
| Geometry-2 | 0.00 | 0.01 | 0.06 | 0.07 | 0.06 | 0.07 | 0.14 | 0.20 | 0.21 | 0.19 | 115.9 | 16.4 | 22.5 | 34.8 | 39.6 | |
| Time of Flight | Geometry-1 | 0.00 | 0.17 | 0.17 | 0.83 | 1.42 | 0.00 | 0.41 | 0.41 | 1.63 | 3.15 | 0.00 | 0.28 | 0.24 | 1.62 | 3.34 |
| Geometry-2 | 0.29 | 0.21 | 0.21 | 0.21 | 0.21 | 0.53 | 0.46 | 0.46 | 0.46 | 0.46 | 0.46 | 0.39 | 0.46 | 0.48 | 0.67 | |
| Line Scan | Datasets of | MAE | RMSE | MAPE (%) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Different Geometrical | Sequence of Images at | Sequence of Images at | Sequence of Images at | |||||||||||||
| Domain | T-1 | T-2 | T-3 | T-4 | T-5 | T-1 | T-2 | T-3 | T-4 | T-5 | T-1 | T-2 | T-3 | T-4 | T-5 | |
| Amplitude | Curved | 0.00 | 0.00 | 0.00 | 0.01 | 0.01 | 0.00 | 0.10 | 0.13 | 0.06 | 0.06 | 0.00 | 55.9 | 48.3 | 36.6 | 26.6 |
| T-shaped | 0.00 | 0.00 | 0.00 | 0.01 | 0.00 | 0.00 | 0.00 | 0.06 | 0.08 | 0.18 | 0.00 | 0.00 | 78.7 | 73.0 | 74.0 | |
| Triangular | 0.00 | 0.01 | 0.01 | 0.01 | 0.00 | 0.00 | 0.06 | 0.07 | 0.07 | 0.19 | 0.00 | 57.8 | 67.4 | 131 | 71.4 | |
| Time of Flight | Curved | 0.00 | 0.50 | 0.86 | 0.07 | 0.29 | 0.00 | 1.16 | 1.51 | 0.27 | 0.85 | 0.00 | 1.05 | 1.36 | 0.20 | 0.90 |
| T-shaped | 0.00 | 0.00 | 0.43 | 0.79 | 1.86 | 0.00 | 0.00 | 0.76 | 1.16 | 2.54 | 0.00 | 0.00 | 1.16 | 2.10 | 4.32 | |
| Triangular | 0.00 | 1.14 | 0.23 | 1.64 | 0.64 | 0.00 | 1.75 | 0.48 | 2.56 | 1.04 | 0.00 | 5.37 | 1.19 | 5.34 | 1.98 | |
| Line Scan | Datasets of | MAE | RMSE | MAPE (%) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Varying Frequencies | Sequence of Images at | Sequence of Images at | Sequence of Images at | |||||||||||||
| and Cycles | T-1 | T-2 | T-3 | T-4 | T-5 | T-1 | T-2 | T-3 | T-4 | T-5 | T-1 | T-2 | T-3 | T-4 | T-5 | |
| Amplitude | 5 MHz with 2 cycles | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.00 | 0.00 | 0.00 | 0.00 | 0.19 | 0.00 | 0.00 | 0.00 | 0.00 | 50.1 |
| 5 MHz with 3 cycles | 0.01 | 0.00 | 0.02 | 0.01 | 0.01 | 0.23 | 0.22 | 0.21 | 0.05 | 0.21 | 118 | 477 | 108 | 99.2 | 111 | |
| 4 MHz with 2 cycles | 0.00 | 0.00 | 0.01 | 0.02 | 0.01 | 0.24 | 0.12 | 0.07 | 0.13 | 0.28 | 132 | 221 | 24.8 | 44.7 | 54.0 | |
| 7 MHz with 2 cycles | 0.00 | 0.01 | 0.01 | 0.01 | 0.01 | 0.09 | 0.15 | 0.09 | 0.12 | 0.11 | 203 | 111 | 87.7 | 116 | 135 | |
| Time of Flight | 5 MHz with 2 cycles | 0.00 | 0.00 | 0.00 | 0.00 | 0.56 | 0.00 | 0.00 | 0.00 | 0.00 | 0.88 | 0.00 | 0.00 | 0.00 | 0.00 | 1.19 |
| 5 MHz with 3 cycles | 1.14 | 1.00 | 2.86 | 0.86 | 1.59 | 2.03 | 1.68 | 5.05 | 2.72 | 2.38 | 3.03 | 2.39 | 5.44 | 2.72 | 2.95 | |
| 4 MHz with 2 cycles | 0.36 | 1.50 | 0.21 | 0.57 | 0.79 | 0.71 | 2.87 | 0.46 | 0.93 | 1.16 | 1.51 | 2.60 | 0.78 | 1.19 | 2.03 | |
| 7 MHz with 2 cycles | 0.36 | 0.64 | 0.43 | 0.50 | 1.14 | 0.71 | 0.96 | 0.65 | 0.71 | 2.45 | 0.81 | 1.37 | 0.93 | 0.94 | 5.21 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gantala, T.; Balasubramaniam, K. Implementing Data-Driven Approach for Modelling Ultrasonic Wave Propagation Using Spatio-Temporal Deep Learning (SDL). Appl. Sci. 2022, 12, 5881. https://doi.org/10.3390/app12125881
Gantala T, Balasubramaniam K. Implementing Data-Driven Approach for Modelling Ultrasonic Wave Propagation Using Spatio-Temporal Deep Learning (SDL). Applied Sciences. 2022; 12(12):5881. https://doi.org/10.3390/app12125881
Chicago/Turabian StyleGantala, Thulsiram, and Krishnan Balasubramaniam. 2022. "Implementing Data-Driven Approach for Modelling Ultrasonic Wave Propagation Using Spatio-Temporal Deep Learning (SDL)" Applied Sciences 12, no. 12: 5881. https://doi.org/10.3390/app12125881
APA StyleGantala, T., & Balasubramaniam, K. (2022). Implementing Data-Driven Approach for Modelling Ultrasonic Wave Propagation Using Spatio-Temporal Deep Learning (SDL). Applied Sciences, 12(12), 5881. https://doi.org/10.3390/app12125881