
A New Approach to Predict Dynamic Loads Considering Highway Alignment Using Data Mining Techniques




Abstract
:1. Introduction
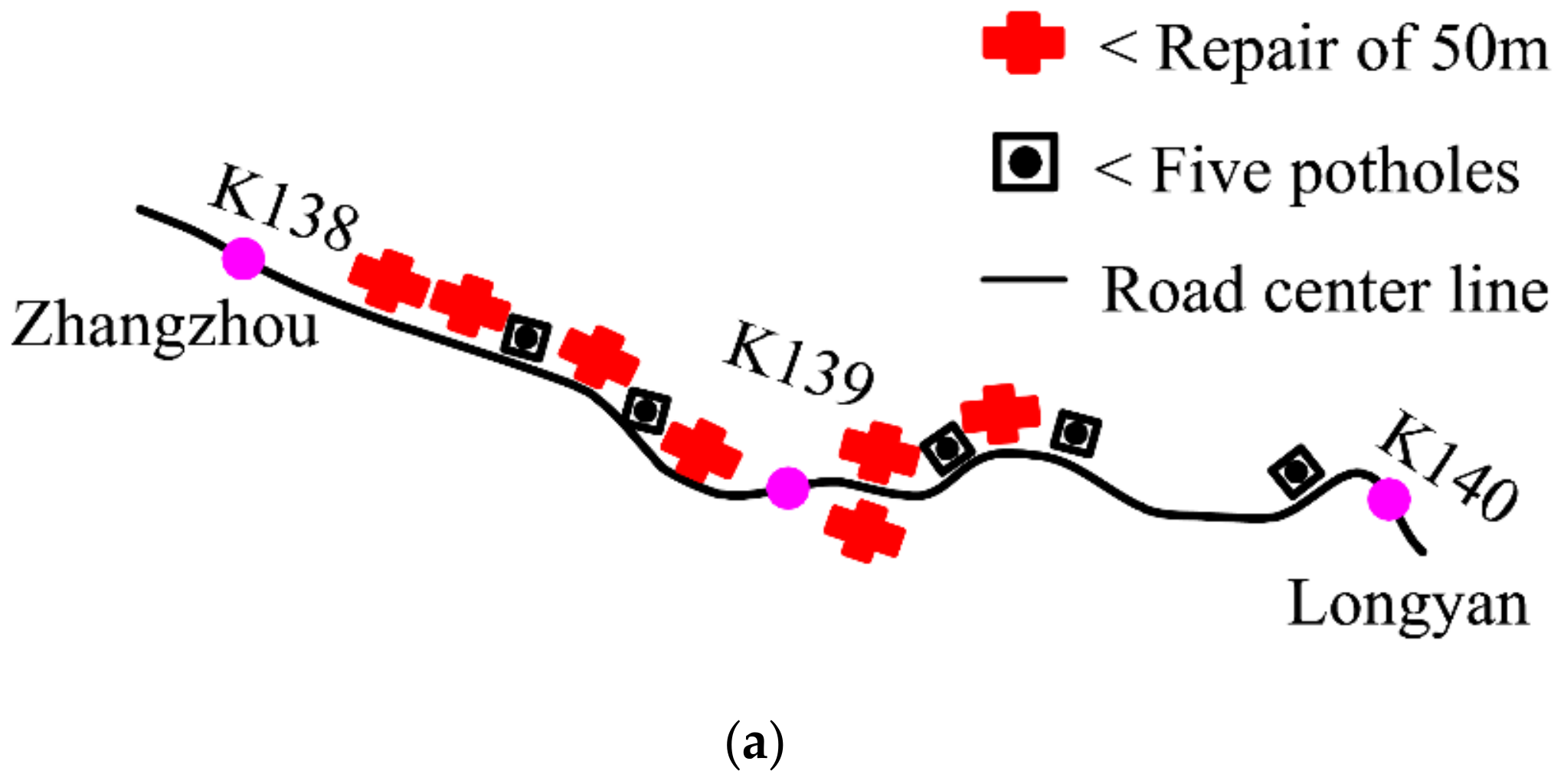
- (a)
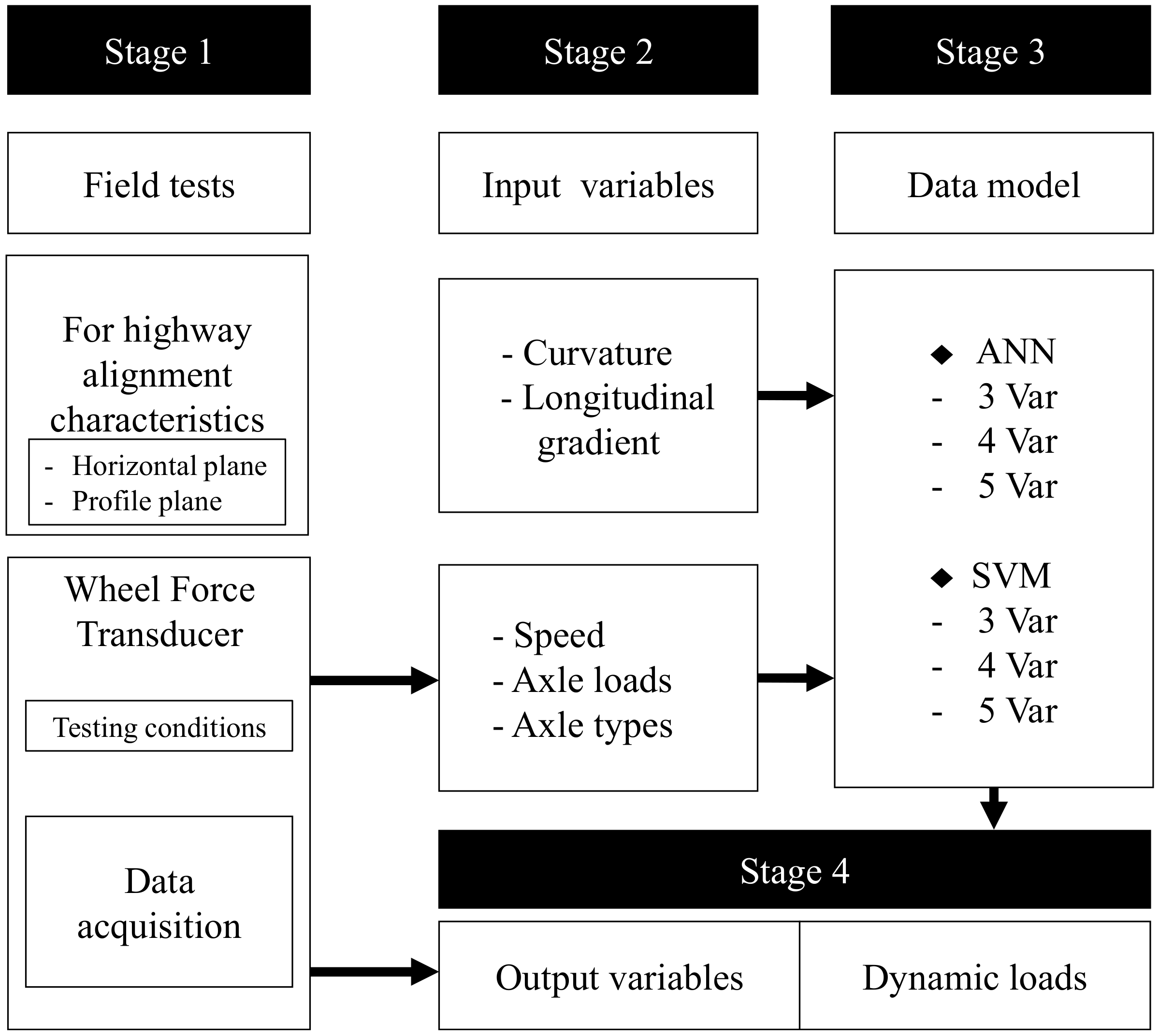
- A six-component wheel force transducer (WFT) was used to acquire dynamic load data under various combinations of highway alignment and vehicle loads. Based on the data, the basic characteristics of dynamic loads were determined.
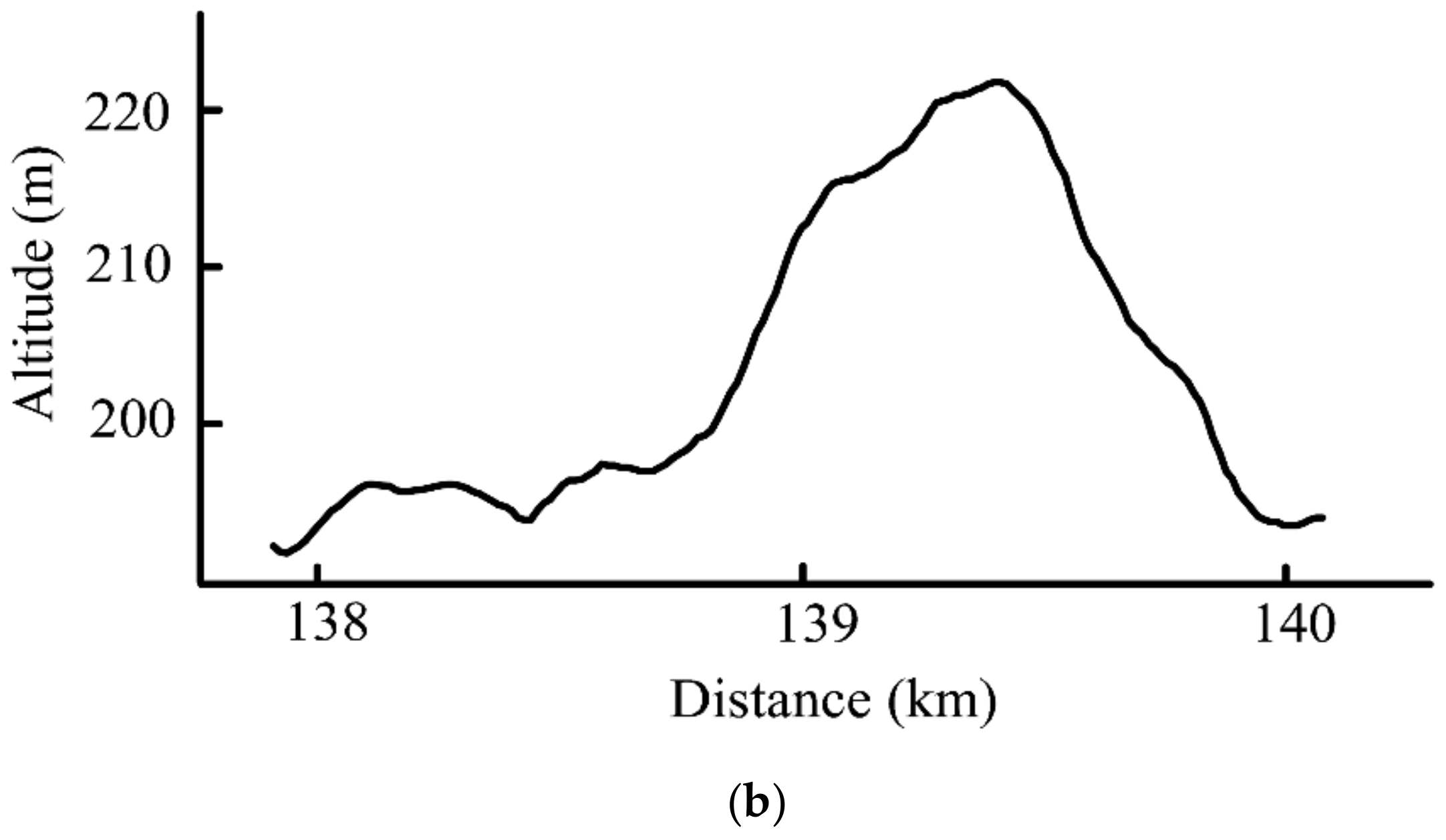
- (b)
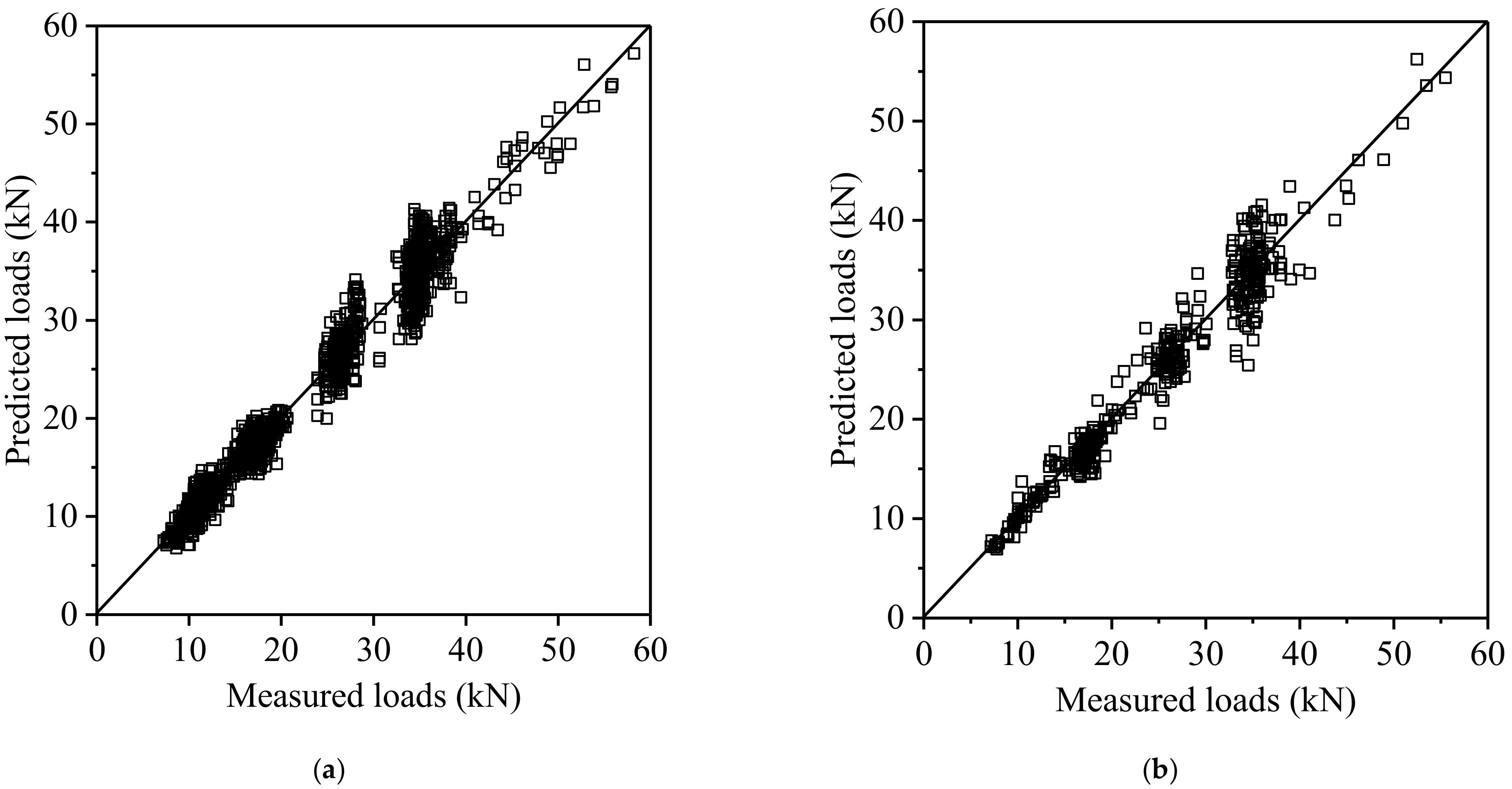
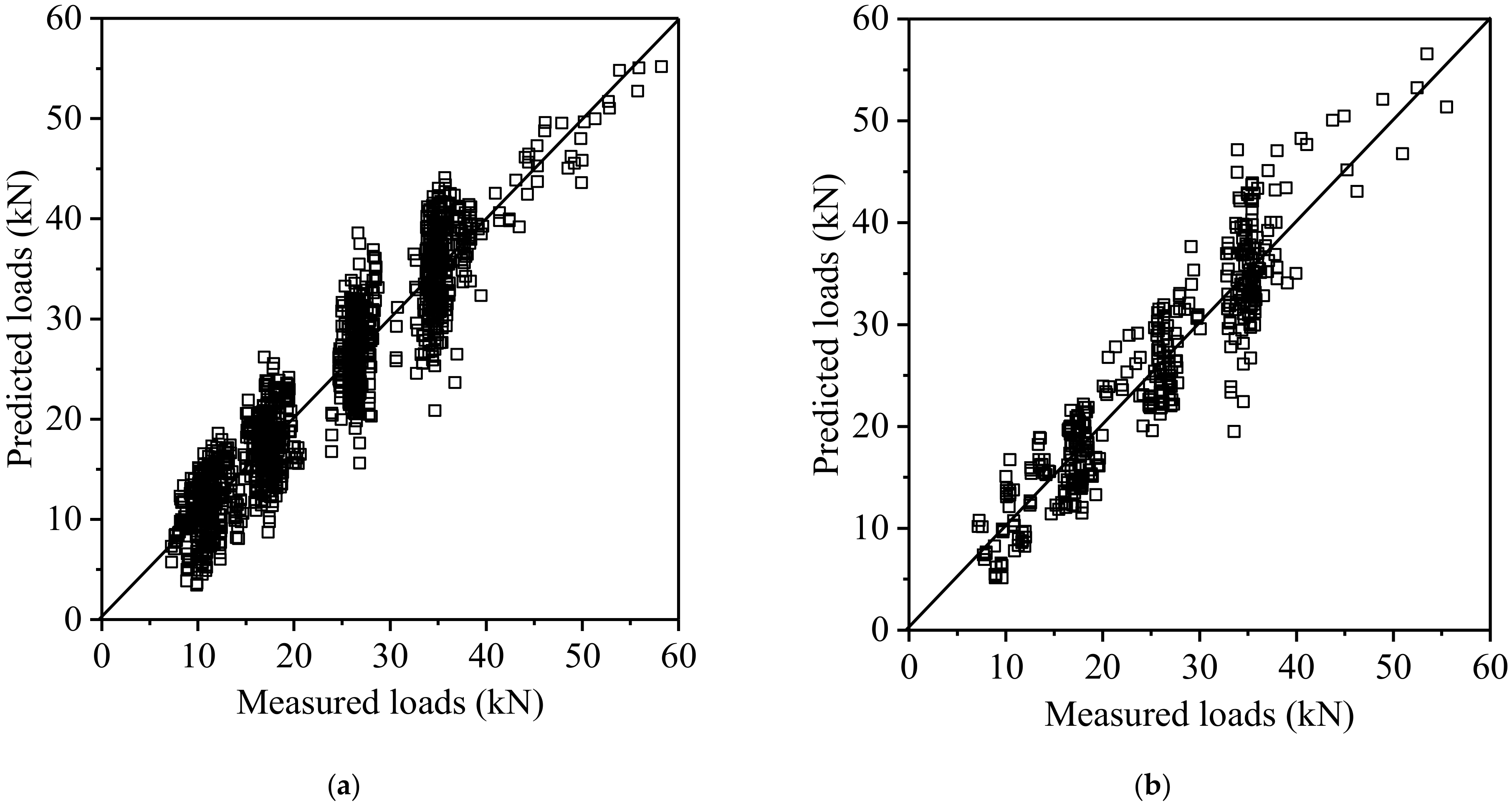
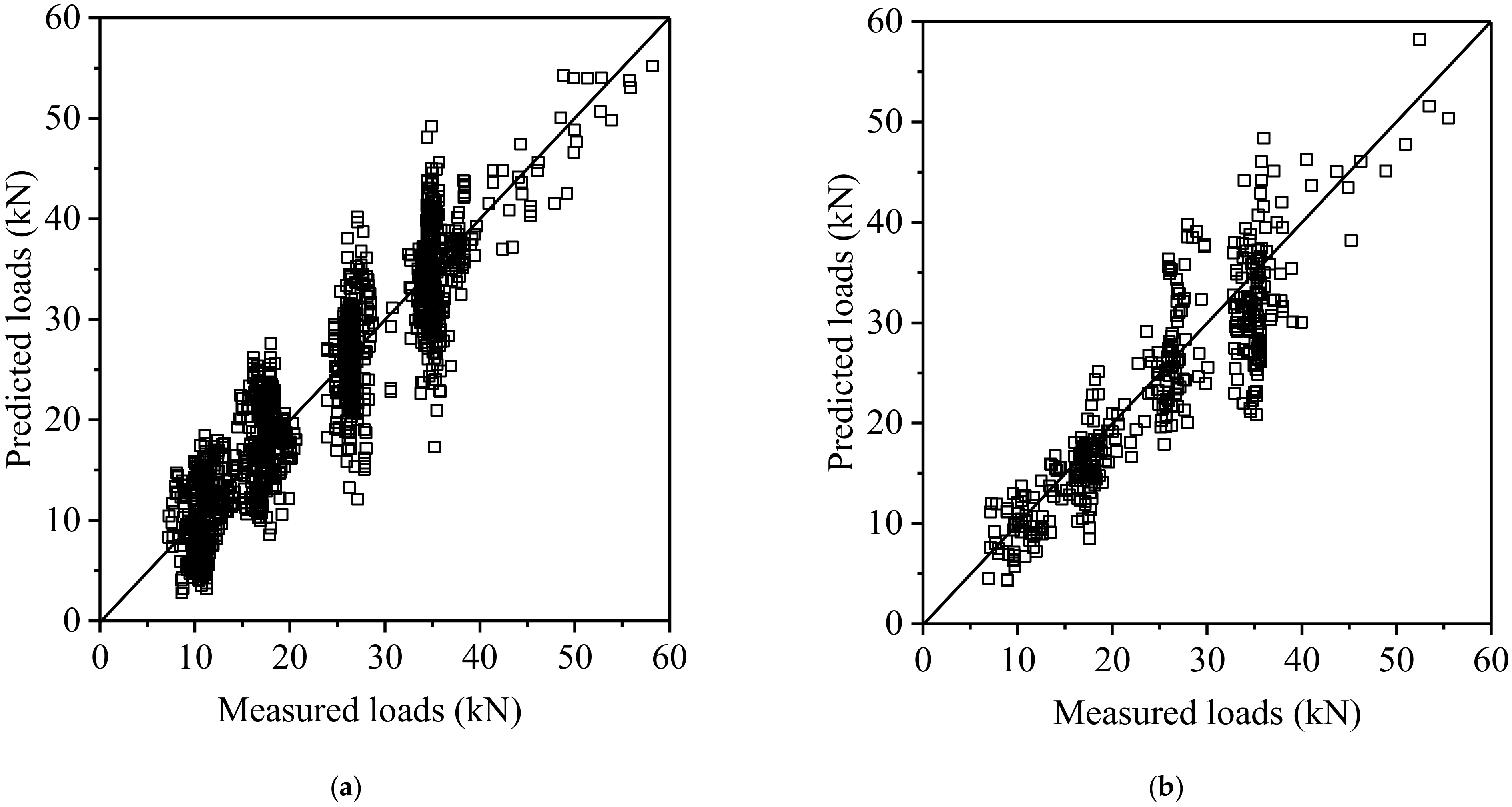
- Two models were developed using data mining (DM) techniques: artificial neural network (ANN) and support vector machine (SVM). The models included five parameters (curvature, longitudinal grade, speed, loads, and axle types) that were used to predict dynamic loads. In order to determine the least-significant input variables, the performance of the models with three, four, and five parameters were separately evaluated. The results showed that at least four parameters were needed to obtain a satisfactory prediction model.
- (c)
- The performances of the ANN and SVM models were compared. The results revealed that the ANN model showed a better capability to predict dynamic loads.
- (d)
- The interaction between vehicle and highway alignment was determined using the ANN technique. The curvature effects on dynamic loads were greater than those of the longitudinal grade.
2. Literature Review
3. Research Motivation
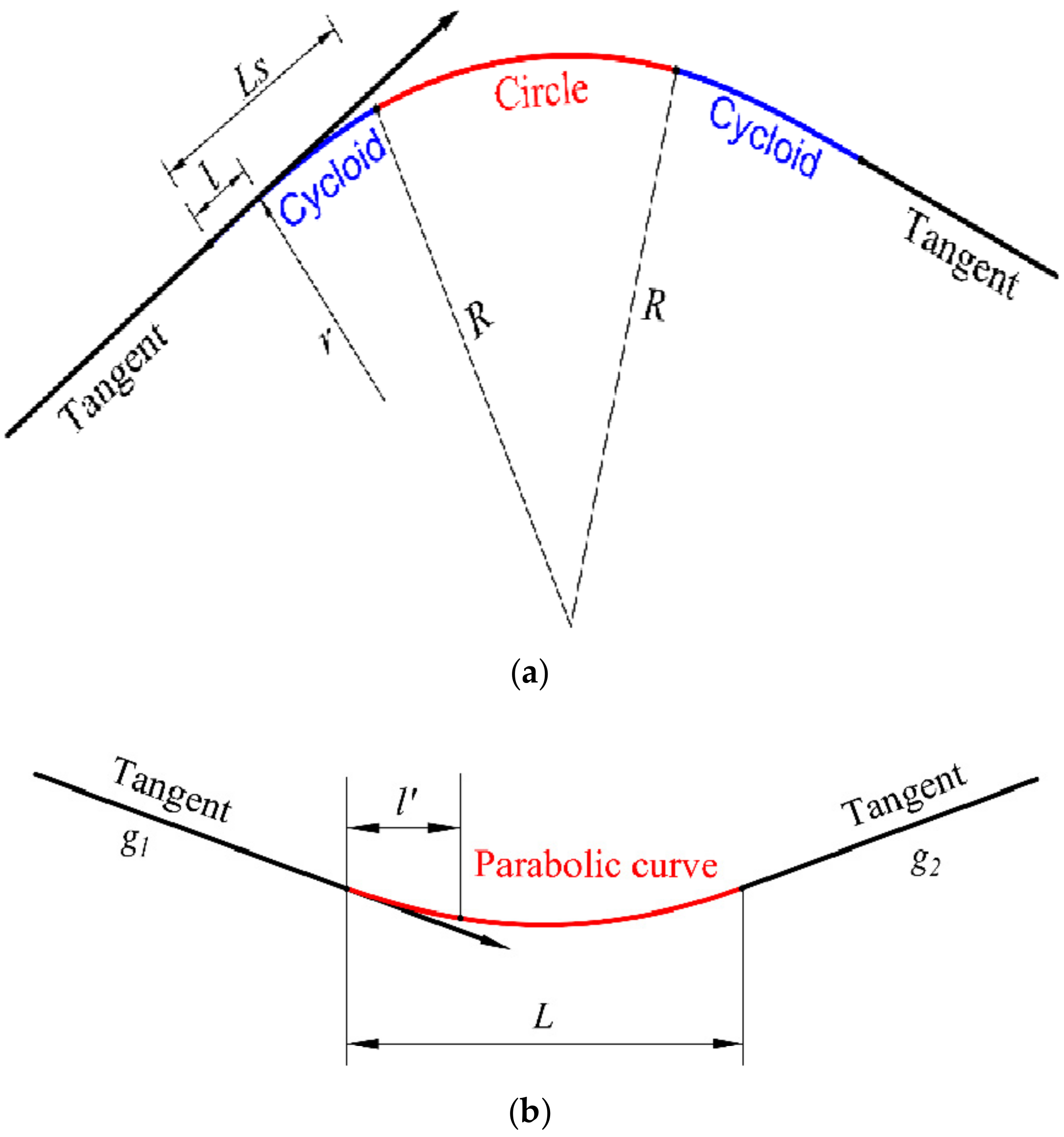
4. Definition of Geometric Variables
5. Methodology
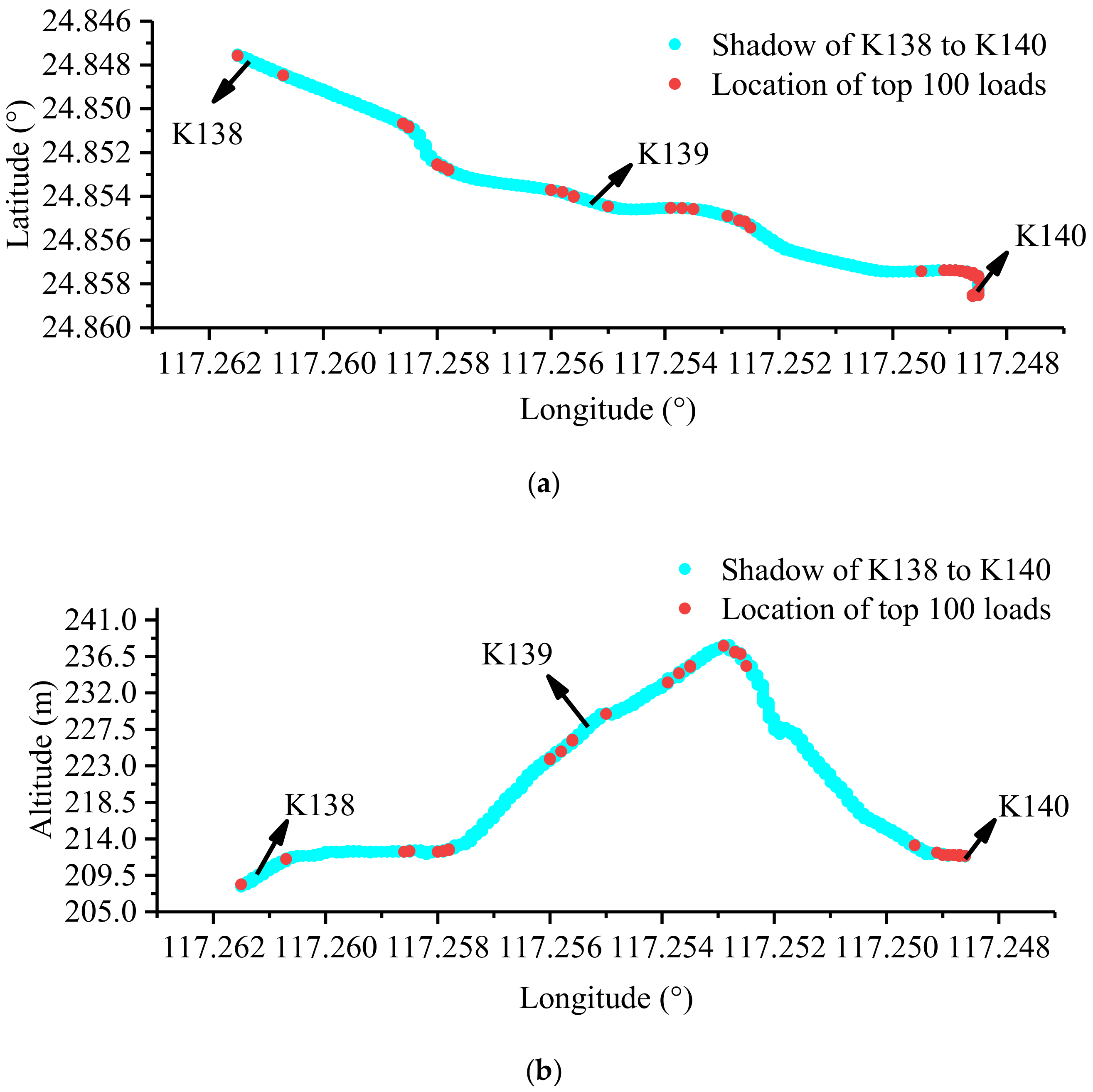
5.1. Field Tests
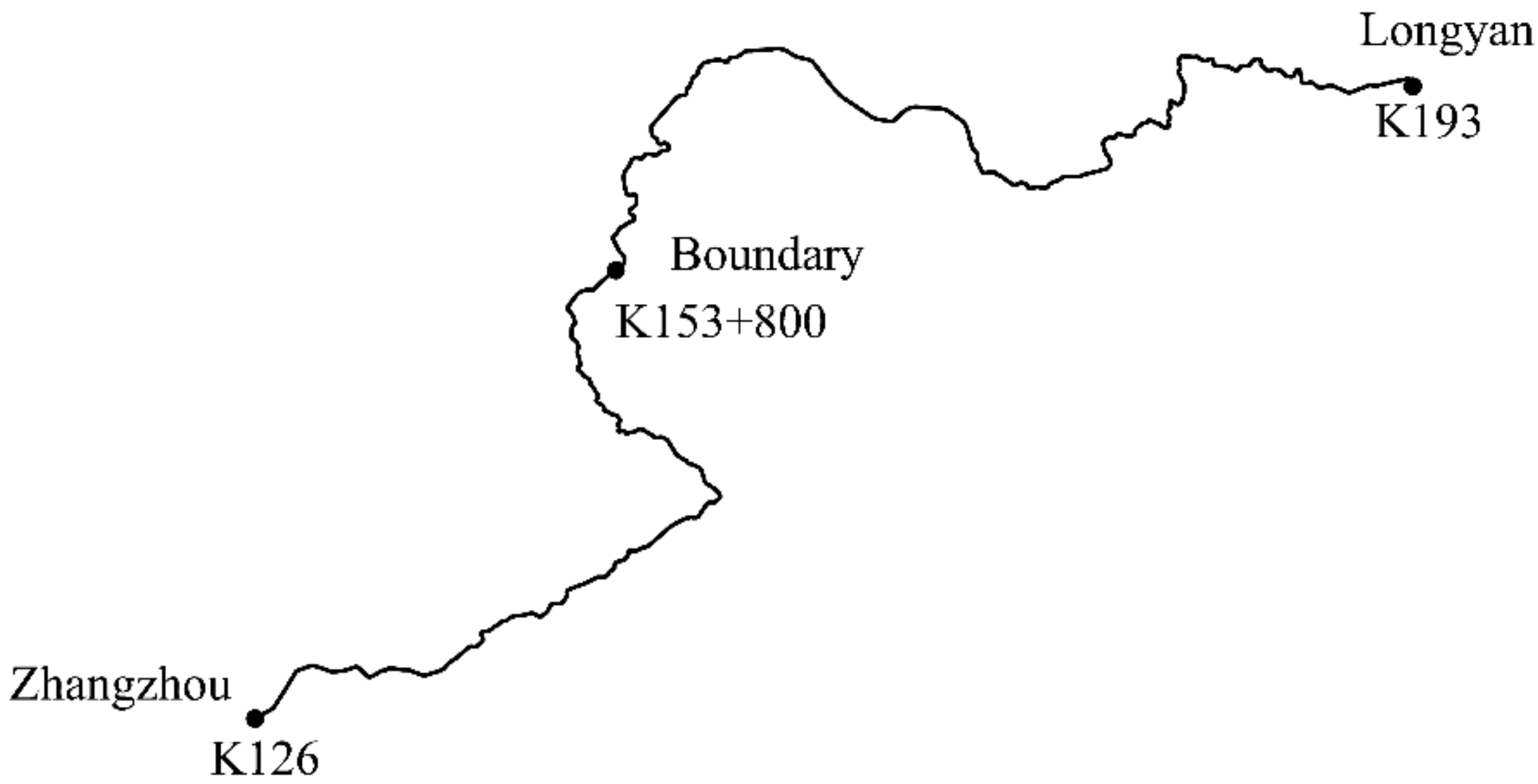
5.1.1. Highway Alignment
5.1.2. Trucks and Wheel Force Transducer
5.2. Data Mining Techniques
5.2.1. Input Variables
5.2.2. ANN Model
5.2.3. SVM Model
6. Results and Discussion
7. Concluding Remarks
- A novel approach was presented to evaluate the effect of the vehicle–highway alignment interaction on vehicle dynamic loads using a WFT. The interaction was verified using field investigation of pavement damages, alignment characteristics, and a dynamic load test.
- The wheel six-component force measurement system proposed in this paper and the use of data mining techniques were critical to understanding the relationship between the vehicle–highway alignment and vehicle dynamic loads.
- The proposed dynamic load prediction models implemented two data mining techniques (ANN and SVM). The ANN-based models with different parameters (five, four, and three) were established to evaluate the relative importance of geometric variables. The results showed that model prediction performance decreased as the number of parameters decreased. The ANN-based model shows a better performance in predicting vehicle dynamic loads than the SVM-based model.
- This research presented in this paper is an initial study aimed at establishing a comprehensive, rapid, and reliable approach to identify pavement distress under vehicle–alignment interactions. Future research will focus on: (a) verifying model robustness, where solid work will be conducted under large-scale scenarios (road sections and vehicle types); and (b) developing an integrated software platform that will assist engineers in making more appropriate highway alignment design and maintenance decisions based on the dynamic loads.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lu, Y.; Yang, S.; Li, S.; Chen, L. Numerical and experimental investigation on stochastic dynamic load of a heavy duty vehicle. Appl. Math. Model. 2010, 34, 2698–2710. [Google Scholar] [CrossRef]
- Ma, S.J.; Huang, X.M. Response of Perpetual Pavement under Different Axle Heavy Truck. Adv. Mater. Res. 2013, 838, 1173–1181. [Google Scholar] [CrossRef]
- Beskou, N.D.; Muho, E.V.; Jiang, Q. Dynamic analysis of an elastic plate on a cross-anisotropic elastic half-space under a rectangular moving load. Acta Mech. 2020, 231, 4735–4759. [Google Scholar] [CrossRef]
- Judycki, J. Determination of equivalent axle load factors on the basis of fatigue criteria for flexible and semi-rigid pavements. Road Mater. Pavement Des. 2010, 11, 187–202. [Google Scholar] [CrossRef]
- Li, L.; Huang, X.; Han, D.; Dong, M.; Zhu, D. Investigation of rutting behavior of asphalt pavement in long and steep section of mountainous highway with overloading. Constr. Build. Mater. 2015, 93, 635–643. [Google Scholar] [CrossRef]
- Wang, G.; Morian, D.; Frith, D. Combined Effect of Three-Dimensional Contact Load and Thermal Gradients on the Cracking Performance of Heavy-Duty Asphalt Pavements. Transp. Res. Rec. J. Transp. Res. Board 2013, 2368, 66–78. [Google Scholar] [CrossRef]
- Zheng, M.; Han, L.; Wang, C.; Xu, Z.; Li, H.; Ma, Q. Simulation of Permanent Deformation in High-Modulus Asphalt Pavement with Sloped and Horizontally Curved Alignment. Appl. Sci. 2017, 7, 331. [Google Scholar] [CrossRef]
- Segel, L.; Lu, X.P. Vehicular resistance to motion as influenced by road roughness and highway alignment. Aust. Road Res. 2013, 12, 211–222. [Google Scholar]
- Kakara, S.; Chowdary, V. Effect of Pavement Roughness and Transverse Slope on the Magnitude of Wheel Loads. Arab. J. Sci. Eng. 2020, 45, 4405–4418. [Google Scholar] [CrossRef]
- Barbosa, R.S. Vehicle Dynamic Safety in Measured Rough Pavement. J. Transp. Eng. 2011, 137, 305–310. [Google Scholar] [CrossRef] [Green Version]
- Degrande, M.A.; Lombaert, G. The effect of road unevenness on the dynamic vehicle response and ground-borne vibrations due to road traffic. Soil Dyn. Earthq. Eng. 2011, 31, 1357–1377. [Google Scholar]
- Khavassefat, P.; Jelagin, D.; Birgisson, B. Dynamic response of flexible pavements at vehicle–road interaction. Road Mater. Pavement Des. 2015, 16, 256–276. [Google Scholar] [CrossRef]
- Mucka, P. Road waviness and the dynamic tyre force. Int. J. Veh. Des. 2004, 36, 216. [Google Scholar] [CrossRef]
- Cebon, D. Vehicle-Generated Road Damage: A Review. Veh. Syst. Dyn. 1989, 18, 107–150. [Google Scholar] [CrossRef]
- Bilodeau, J.P.; Gagnon, L.; Doré, G. Assessment of the relationship between the international roughness index and dynamic loading of heavy vehicles. Int. J. Pavement Eng. 2015, 18, 693–701. [Google Scholar] [CrossRef]
- Zhu, J.; Zhang, W. Probabilistic fatigue damage assessment of coastal slender bridges under coupled dynamic loads. Eng. Struct. 2018, 166, 274–285. [Google Scholar] [CrossRef]
- Liu, Y.; Fang, H.; Zheng, J.-J.; Wang, Y.-N. Dynamic behaviour of pavement on a two-parameter viscoelastic foundation subjected to loads moving with variable speeds. Int. J. Pavement Eng. 2021, 1–19. [Google Scholar] [CrossRef]
- Beer, M.D. Measurement of tyre/pavement interface stresses under moving wheel loads. Int. J. Heavy Veh. Syst. 1996, 3, 97–115. [Google Scholar]
- Cebon, D. Interaction between Heavy Vehicles and Roads; SAE Technical Papers; SAE International: Warrendale, PA, USA, 1993. [Google Scholar] [CrossRef]
- Collop, A.C.; Potter, T.E.; Cebon, D.; Cole, D.J. Investigation of spatial repeatability using a tire force measuring mat. Comp. Biochem. Physiol. Part A Mol. Integr. Physiol. 1994, 131, 467–474. [Google Scholar]
- Li, S.; Yang, S.; Chen, L.-Q.; Lu, Y. Effects of parameters on dynamic responses for a heavy vehicle-pavement-foundation coupled system. Int. J. Heavy Veh. Syst. 2012, 19, 207. [Google Scholar] [CrossRef]
- Yang, S.; Li, S.; Lu, Y. Investigation on dynamical interaction between a heavy vehicle and road pavement. Veh. Syst. Dyn. 2010, 48, 923–944. [Google Scholar] [CrossRef]
- Park, D.-W.; Papagiannakis, A.T.; Kim, I.T. Analysis of dynamic vehicle loads using vehicle pavement interaction model. KSCE J. Civ. Eng. 2014, 18, 2085–2092. [Google Scholar] [CrossRef]
- Ren, W.Q.; Zhang, Y.Q.; Jin, G.D. A new application of multi-body system dynamics in vehicle-road interaction simulation. Wuhan Univ. J. Nat. Sci. 2003, 8, 379–382. [Google Scholar]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; General Motors Inst., SAE International: Washington, DC, USA, 2000. [Google Scholar]
- Shi, X.M.; Cai, C.S. Simulation of Dynamic Effects of Vehicles on Pavement Using a 3D Interaction Model. J. Transp. Eng. 2009, 135, 736–744. [Google Scholar] [CrossRef]
- Nguyen, T.-T. Mining incrementally closed item sets with constructive pattern set. Expert Syst. Appl. 2018, 100, 41–67. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.M.; Hussain, S.M.S.; Ustun, T.S.; Sarker, M.R.; Hannan, M.A.; Mohamed, R.; Ali, J.A.; Mekhilef, S.; Milad, A. Artificial Neural Networks Based Optimization Techniques: A Review. Electronics 2021, 10, 2689. [Google Scholar] [CrossRef]
- Banharnsakun, A. Hybrid ABC-ANN for pavement surface distress detection and classification. Int. J. Mach. Learn. Cybern. 2017, 8, 699–710. [Google Scholar] [CrossRef]
- Zhang, H.; Fu, X.; Jiang, H.; Liu, X.; Lv, L. The relationships between asphalt ageing in lab and field based on the neural network. Road Mater. Pavement Des. 2015, 16, 493–504. [Google Scholar] [CrossRef]
- Androjić, I.; Dolaček-Alduk, Z. Artificial neural network model for forecasting energy consumption in hot mix asphalt (HMA) production. Constr. Build. Mater. 2018, 170, 424–432. [Google Scholar] [CrossRef]
- Gajewski, J.; Sadowski, T. Sensitivity analysis of crack propagation in pavement bituminous layered structures using a hybrid system integrating Artificial Neural Networks and Finite Element Method. Comput. Mater. Sci. 2014, 82, 114–117. [Google Scholar] [CrossRef]
- Saltan, M.; Terzi, S.; Küçüksille, E.U. Backcalculation of pavement layer moduli and Poisson’s ratio using data mining. Expert Syst. Appl. 2011, 38, 2600–2608. [Google Scholar] [CrossRef]
- Commuri, S.; Mai, A.T.; Zaman, M. Neural Network–Based Intelligent Compaction Analyzer for Estimating Compaction Quality of Hot Asphalt Mixes. J. Constr. Eng. Manag. 2011, 137, 634–644. [Google Scholar] [CrossRef] [Green Version]
- Alatoom, Y.; Al-Suleiman, T. Development of pavement roughness models using Artificial Neural Network (ANN). Int. J. Pavement Eng. 2022, 1–16. [Google Scholar] [CrossRef]
- Sirhan, M.; Bekhor, S.; Sidess, A. Implementation of Deep Neural Networks for Pavement Condition Index Prediction. J. Transp. Eng. Part B Pavements 2022, 148, 04021070. [Google Scholar] [CrossRef]
- Gopalakrishnan, K.; Kim, S. Support Vector Machines Approach to HMA Stiffness Prediction. J. Eng. Mech. 2011, 137, 138–146. [Google Scholar] [CrossRef]
- Maalouf, M.; Khoury, N.; Laguros, J.G.; Kumin, H. Support vector regression to predict the performance of stabilized aggregate bases subject to wet-dry cycles. Int. J. Numer. Anal. Methods Géoméch. 2012, 36, 675–696. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, S.; Ma, Z. Model of the wheel motion state under path constraints based on the Darboux frame in 3D space. Eng. Comput. 2018, 35, 2883–2903. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, S. Smooth path and velocity planning under 3D path constraints for car-like vehicles. Robot. Auton. Syst. 2018, 107, 87–99. [Google Scholar] [CrossRef]
- Michigan Science Corporation. Heavy Duty Wheel Force Transducer System. Available online: http://www.msc-cn.com/download/wheel-force-transducers-wft-brochure/?wpdmdl=2631 (accessed on 1 November 2019).
- Feng, L.; Lin, G.; Zhang, W.; Pang, H.; Wang, T. Design and optimization of a self-decoupled six-axis wheel force transducer for a heavy truck. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 229, 1585–1610. [Google Scholar] [CrossRef]
- Xue, W. R Language Data Mining; People’s University of China Press: Beijing, China, 2016. [Google Scholar]
- Asadi, S.; Hassan, M.; Nadiri, A.; Dylla, H. Artificial intelligence modeling to evaluate field performance of photocatalytic asphalt pavement for ambient air purification. Environ. Sci. Pollut. Res. 2014, 21, 8847–8857. [Google Scholar] [CrossRef]
- Zeng, W.; Miwa, T.; Morikawa, T. Application of the support vector machine and heuristic k-shortest path algorithm to determine the most eco-friendly path with a travel time constraint. Transp. Res. Part D Transp. Environ. 2017, 57, 458–473. [Google Scholar] [CrossRef]
- Chen, Y.; Pedrycz, W.; Watada, J. A fuzzy regression based support vector machine (svm) approach to fuzzy classification. Icic Express Lett. 2010, 4, 2355–2362. [Google Scholar]
- Gillespie, T.D. Effects of Heavy-Vehicle Characteristics on Pavement Response and Performance; Nchrp Report; American Association of State Highway and Transportation Officials: Washington, DC, USA, 1993. [Google Scholar]
- Lu, S. An overview of a unified theory of dynamics of vehicle–pavement interaction under moving and stochastic load. J. Mod. Transp. 2013, 21, 135–162. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interval Partition Curvature k (m) | Proportion of Total Curve Length (%) |
|---|---|
| <1/200 | 29.2 |
| 1/200~1/170 | 4.9 |
| 1/170~1/140 | 6.2 |
| 1/140~1/110 | 12.5 |
| 1/110~1/80 | 24.5 |
| 1/80~1/50 | 17.2 |
| 1/50~1/20 | 5.6 |
| Interval Partition Longitudinal Grade g (%) | Proportion of the Total Length (%) |
|---|---|
| 0~1 | 43.1 |
| 1~2 | 8.4 |
| 2~3 | 9.5 |
| 3~4 | 10.8 |
| 4~5 | 10.6 |
| 5~6 | 9.0 |
| 6~7 | 6.6 |
| 7~8 | 1.9 |
| Axle Types | Loads | Minimum | Maximum | Mean | Standard Deviation | Root Mean Square |
|---|---|---|---|---|---|---|
| Steering axle | Empty | 14.56 | 30.98 | 17.49 | 1.22 | 17.45 |
| Full | 21.24 | 45.12 | 26.04 | 1.77 | 25.98 | |
| Driving axle | Empty | 7.16 | 21.95 | 10.93 | 1.45 | 10.83 |
| Full | 27.73 | 58.24 | 36.43 | 2.57 | 36.33 |
| Metric | M5 | M4 | M3 | |||||
|---|---|---|---|---|---|---|---|---|
| M4k | M4g | |||||||
| ANN | SVM | ANN | SVM | ANN | SVM | ANN | SVM | |
| RMES | 1.648 | 1.851 | 2.469 | 2.718 | 3.446 | 3.632 | 4.112 | 4.367 |
| R2 | 0.972 | 0.964 | 0.940 | 0.924 | 0.892 | 0.879 | 0.847 | 0.832 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, M.; Hu, C.; Easa, S.M.; Jiang, Z. A New Approach to Predict Dynamic Loads Considering Highway Alignment Using Data Mining Techniques. Appl. Sci. 2022, 12, 5719. https://doi.org/10.3390/app12115719
Lin M, Hu C, Easa SM, Jiang Z. A New Approach to Predict Dynamic Loads Considering Highway Alignment Using Data Mining Techniques. Applied Sciences. 2022; 12(11):5719. https://doi.org/10.3390/app12115719
Chicago/Turabian StyleLin, Miao, Changbin Hu, Said M. Easa, and Zhenliang Jiang. 2022. "A New Approach to Predict Dynamic Loads Considering Highway Alignment Using Data Mining Techniques" Applied Sciences 12, no. 11: 5719. https://doi.org/10.3390/app12115719
APA StyleLin, M., Hu, C., Easa, S. M., & Jiang, Z. (2022). A New Approach to Predict Dynamic Loads Considering Highway Alignment Using Data Mining Techniques. Applied Sciences, 12(11), 5719. https://doi.org/10.3390/app12115719