
IHSSAO: An Improved Hybrid Salp Swarm Algorithm and Aquila Optimizer for UAV Path Planning in Complex Terrain

 , ,
, ,
Abstract
:1. Introduction
- We integrate the leader mechanism of SSA into the position update formulation of the AO, which enables the search individuals to fully utilize the information of the optimal solution and enhances the global search capability of the proposed algorithm.
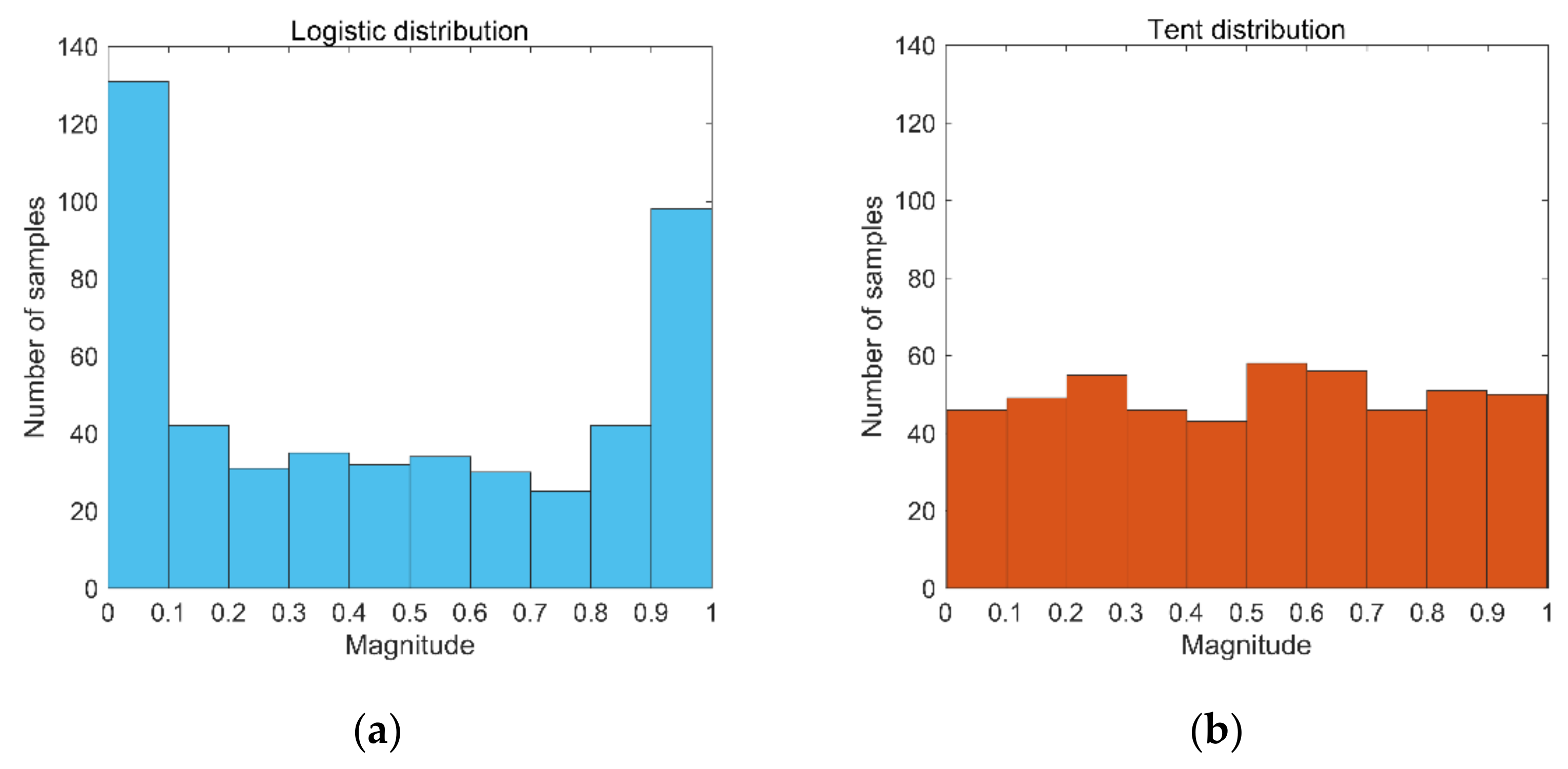
- Tent chaotic map helps the IHSSAO to increase the original population diversity.
- PIOBL helps the proposed algorithm to increase the original population diversity and the capability to escape from local optima.
- To verify the performance of the proposed IHSSAO, we tested it against the SSA, AO, and five other advanced meta-heuristic algorithms by 23 classical benchmark functions and 17 IEEE CEC2017 test functions.
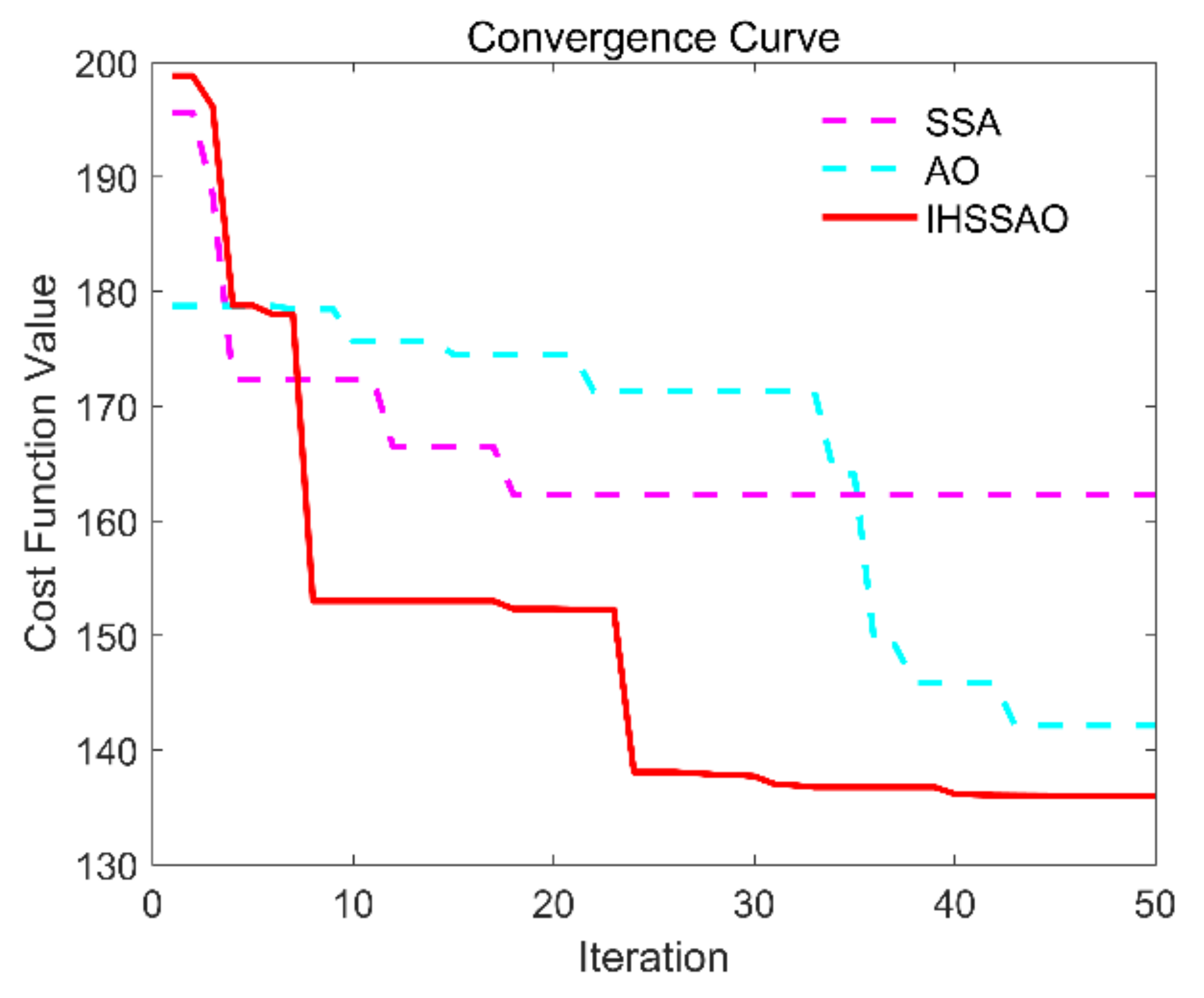
- Eventually, we applied the IHSSAO, SSA, and AO to the UAV path planning problem. The experimental results verify that the proposed IHSSAO is superior to the basic SSA and AO in solving the path planning problem for UAVs in complex terrain.
2. Preliminary Knowledge
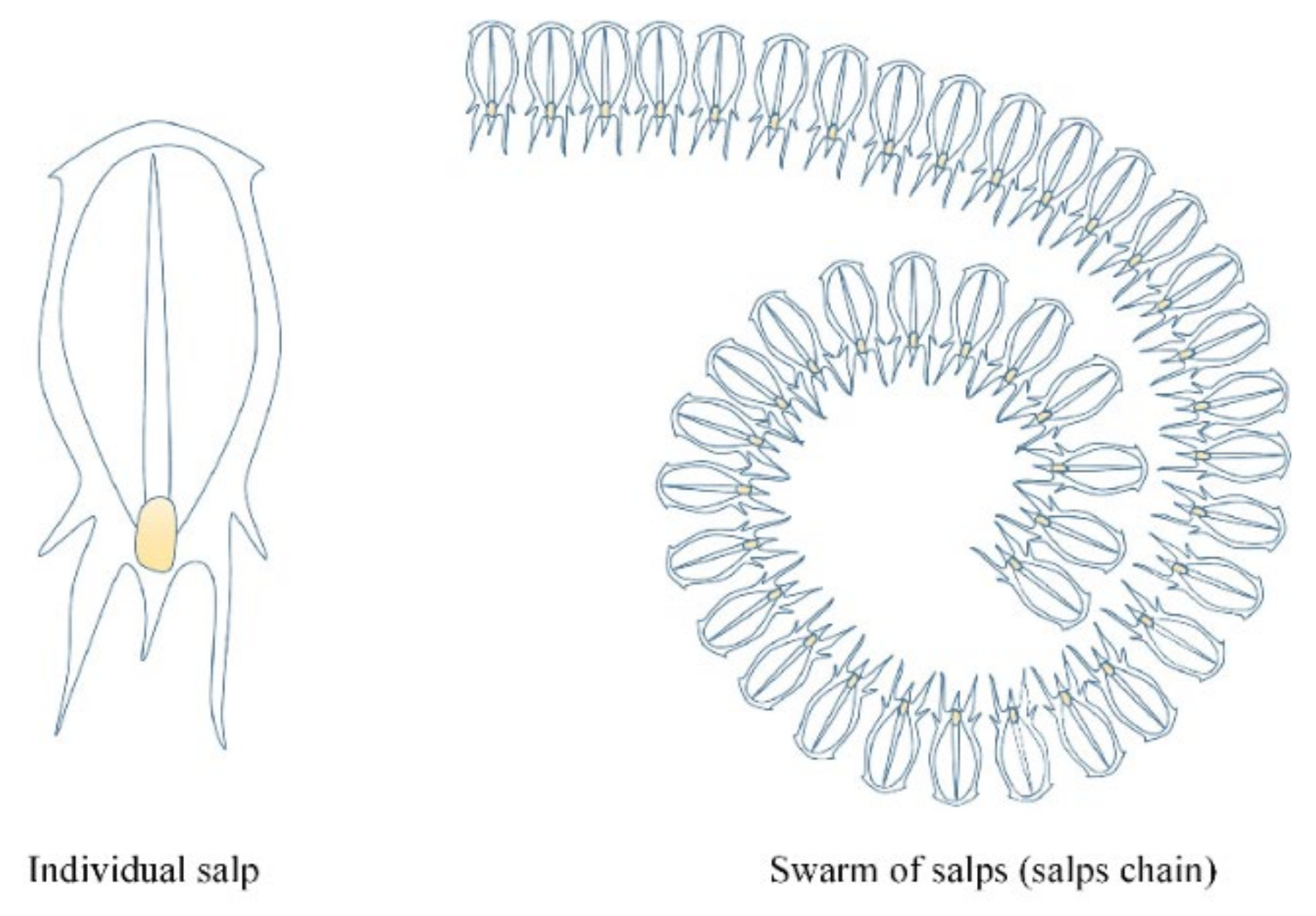
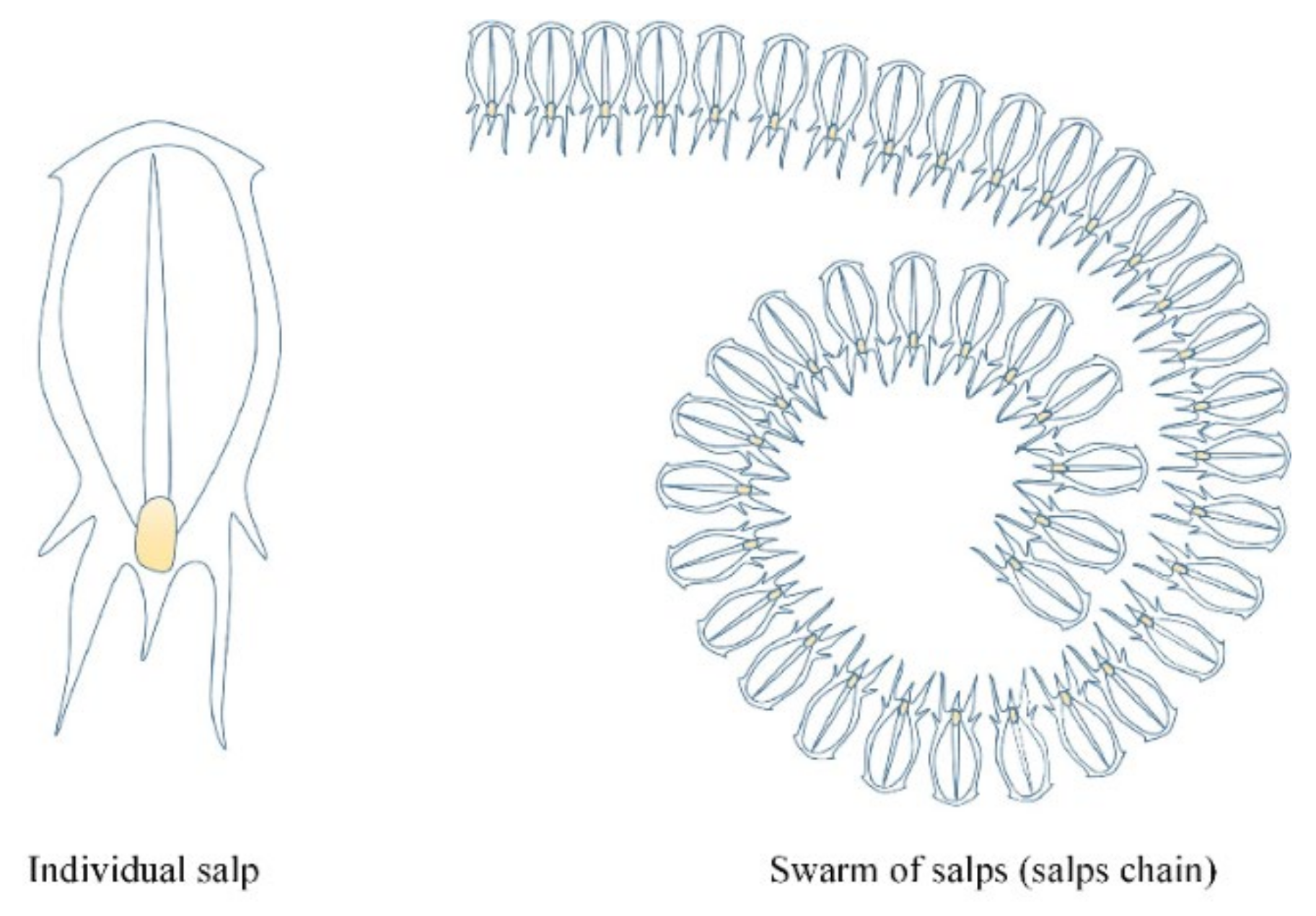
2.1. Salp Swarm Algorithm
2.2. Aquila Optimizer
2.2.1. Expanded Exploration ()
2.2.2. Narrowed Exploration ()
2.2.3. Expanded Exploitation ()
2.2.4. Narrowed Exploitation ()
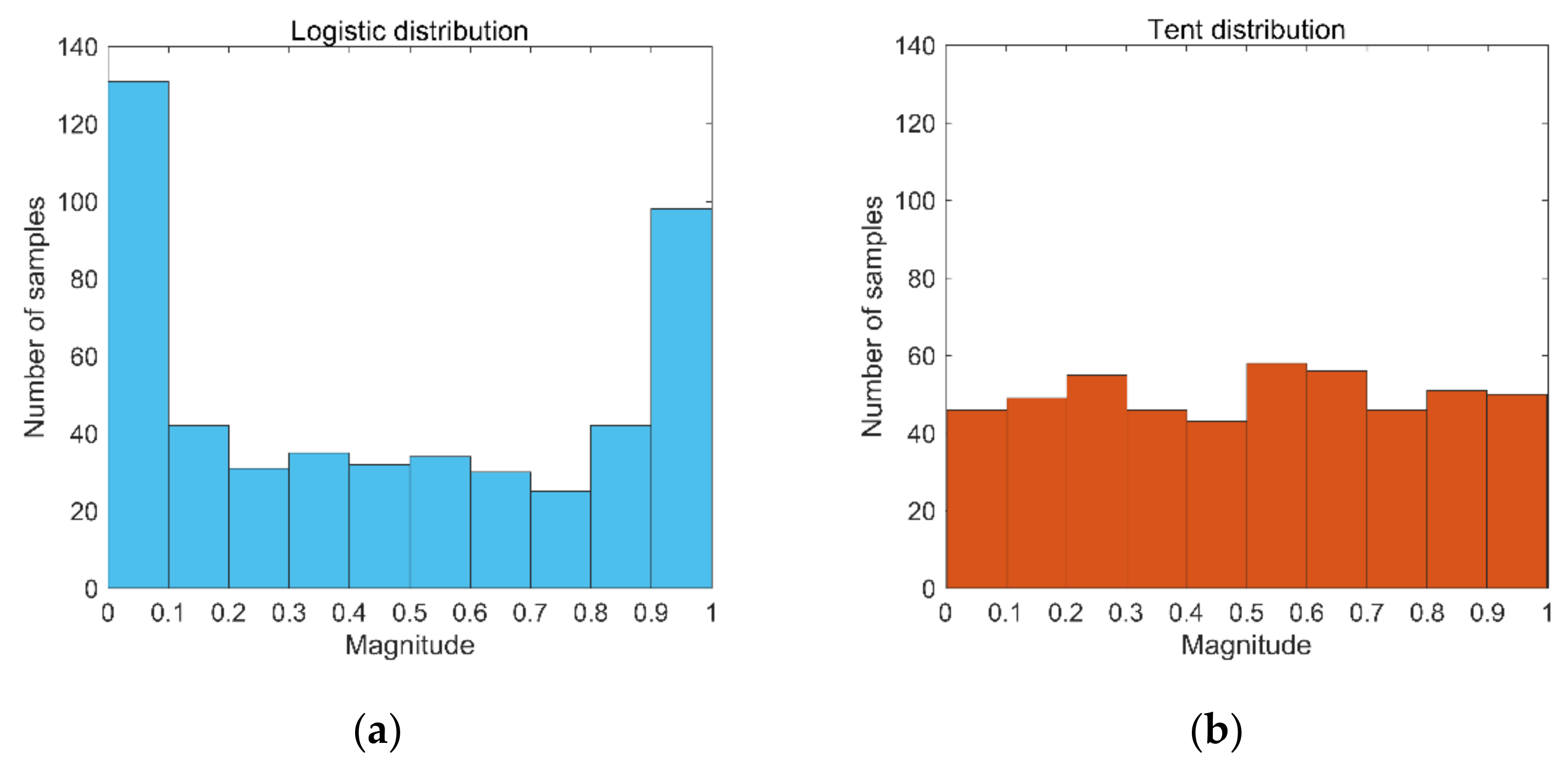
2.3. Tent Chaotic Map
- Step 1:
- Randomly generate between the intervals (avoiding in small periods , , .
- Step 2:
- Iterate through Equation (21) to obtain a sequence of , .
- Step 3:
- If the maximum number of iterations is reached, then turn to Step 4. Otherwise, if or , change the initial value of the iteration by the equation where is a random number, . Otherwise return Step 2.
- Step 4:
- The operation is halted and the sequence is retained.
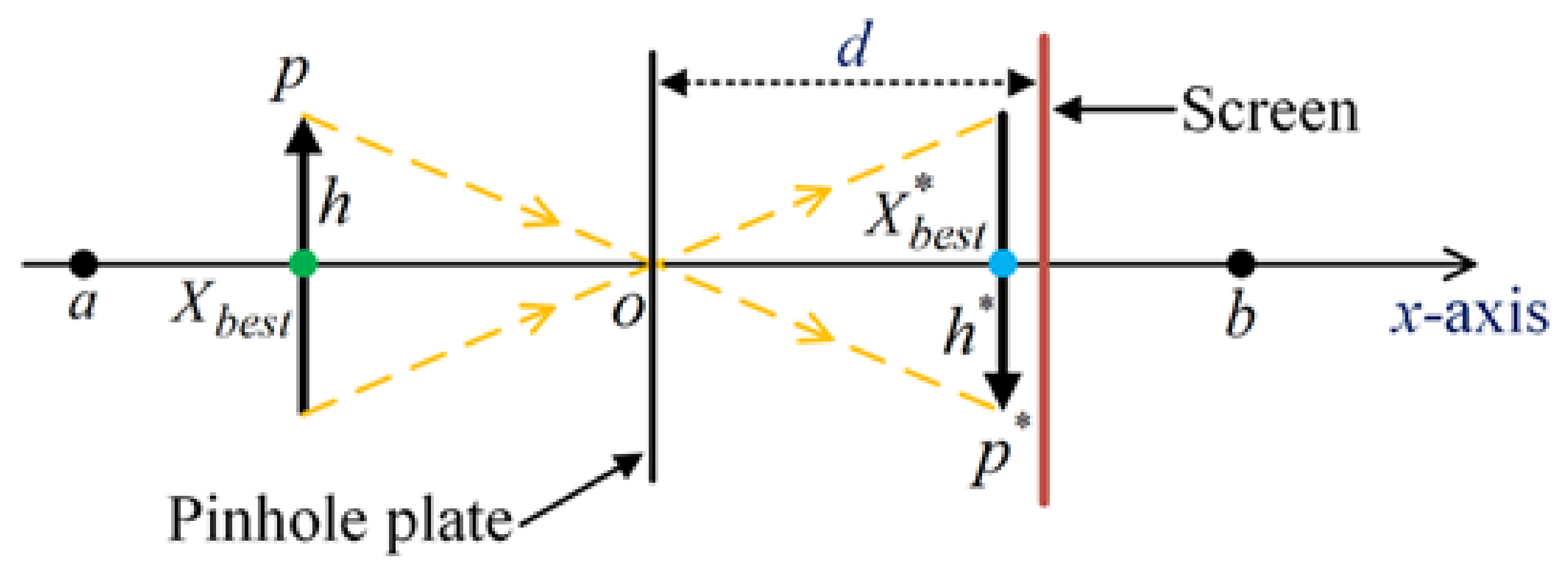
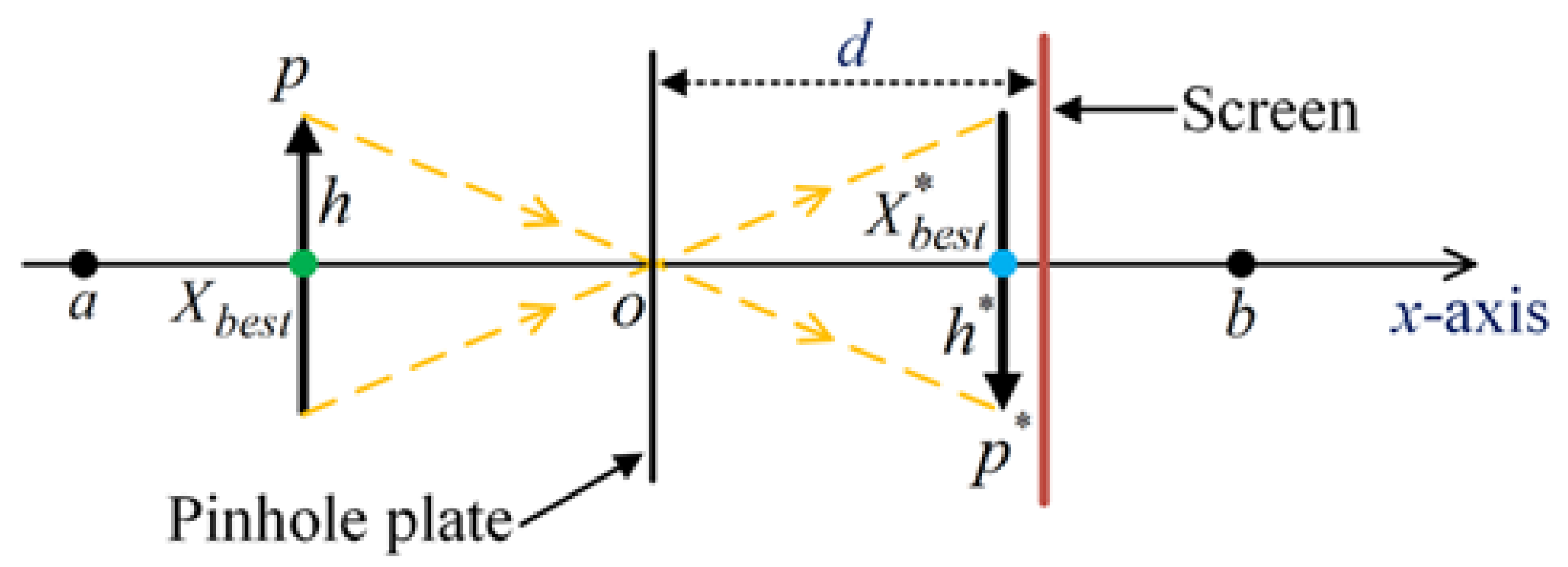
2.4. Pinhole Imaging Opposition-Based Learning
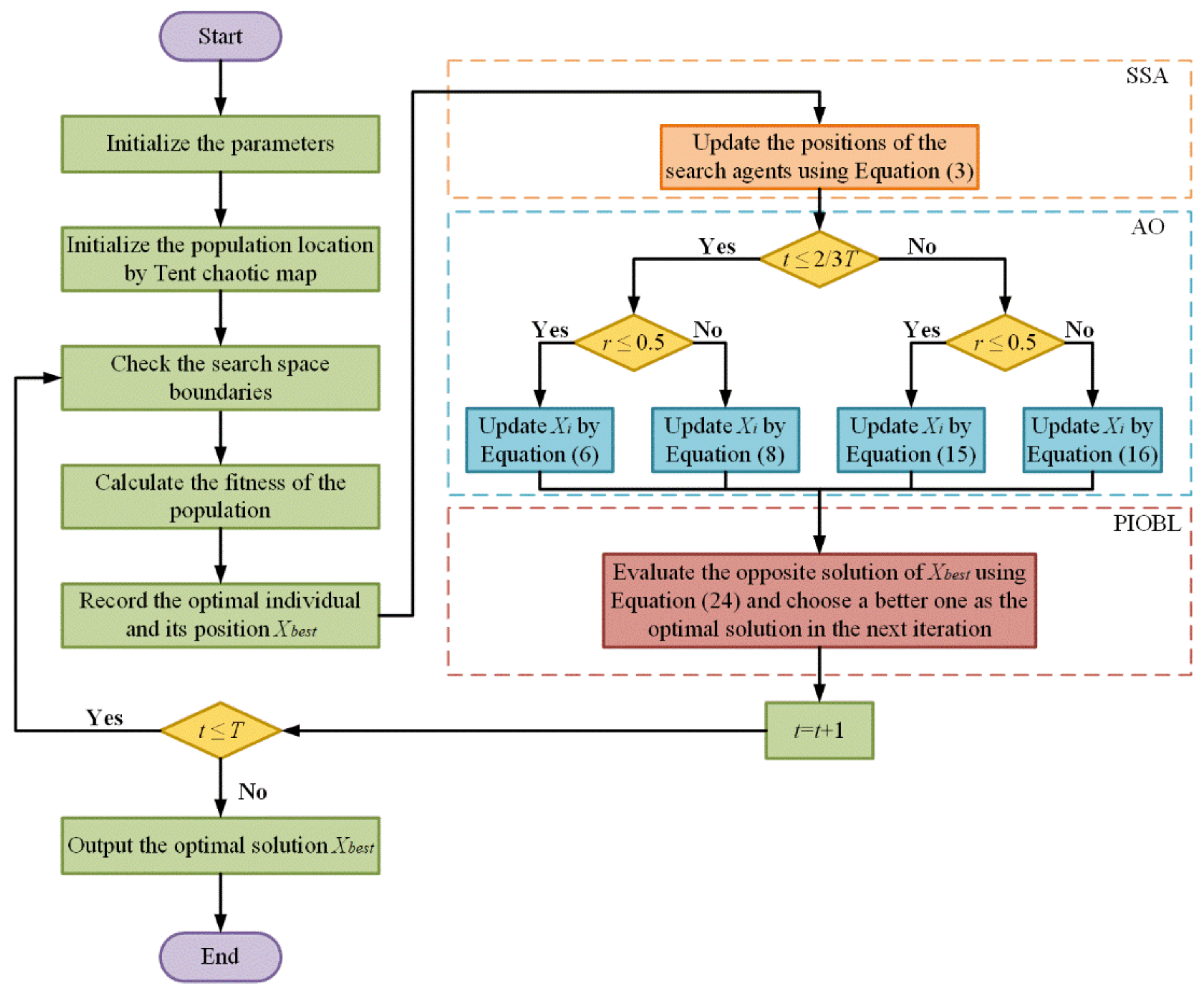
3. The Proposed Algorithm
| Algorithm 1 Pseudo-code of the proposed IHSSAO algorithm |
| 1. Input the population , and the generation number |
| 2. Initialize the positions of each individual by tent chaotic map //tent chaotic map |
| 3. While |
| 4. Check if the position goes beyond the search space boundary and then adjust it |
| 5. Evaluate the fitness values of all search agents |
| 6. Update the global optimum |
| 7. using Equation (3) //SSA |
| 8. For to |
| 9. If t ≤ T then //AO |
| 10. If then |
| 11. Update the position using Equation (6) |
| 12. Else |
| 13. Update the position using Equation (8) |
| 14. End if |
| 15. Else |
| 16. If then |
| 17. Update the position using Equation (15) |
| 18. Else |
| 19. Update the position using Equation (16) |
| 20. End if |
| 21. End if |
| 22. End For |
| 23. Generate the opposite position of using Equation (24) and save the one with better fitness //PIOBL |
| 24. |
| 25. End While |
| 26. Return |
4. Experimental Results and Discussion of IHSSAO Performance Verification
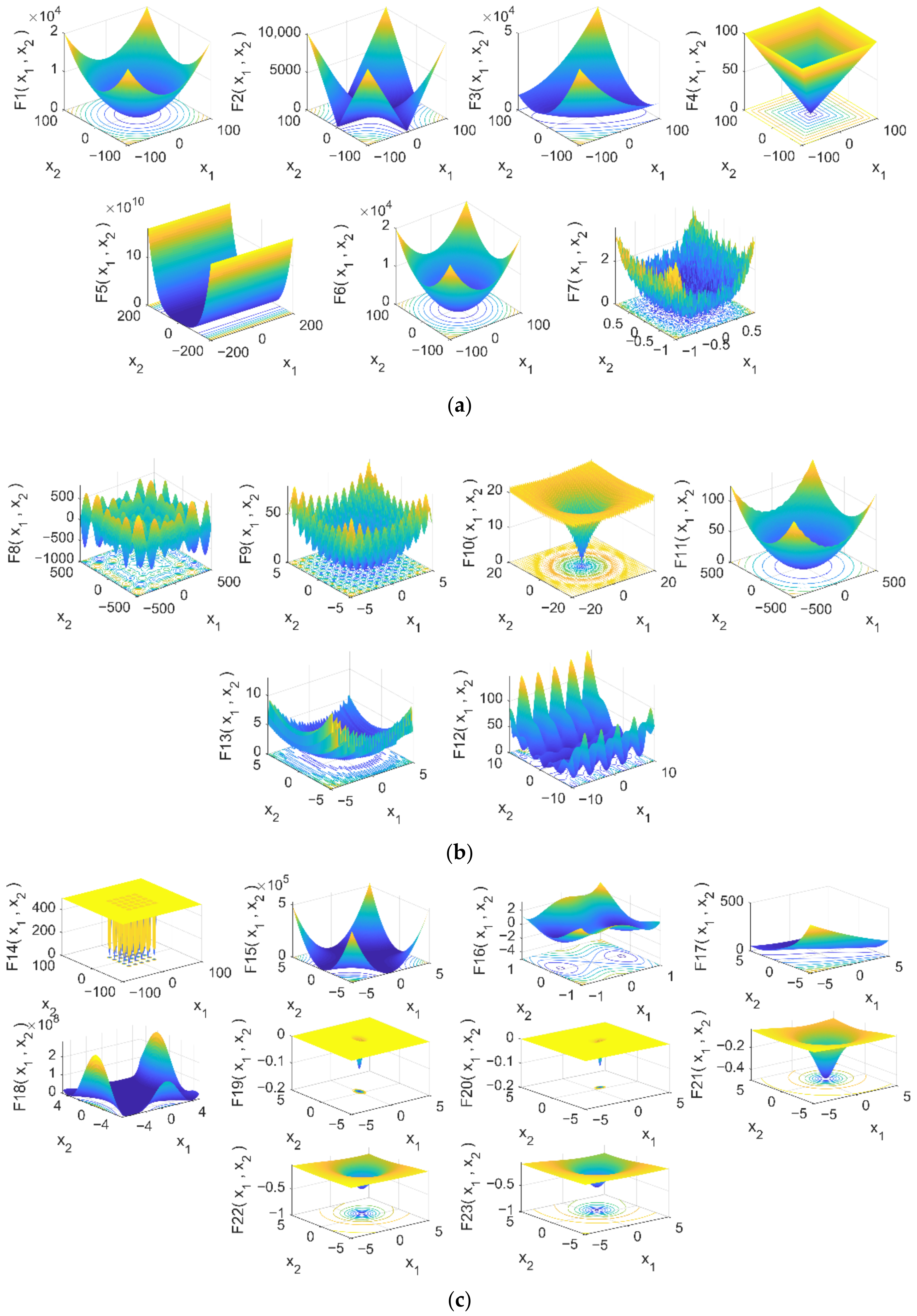
4.1. Experiment I: Classical Benchmark Function
4.1.1. Parameter Setting
4.1.2. Assessment Standards of Performance
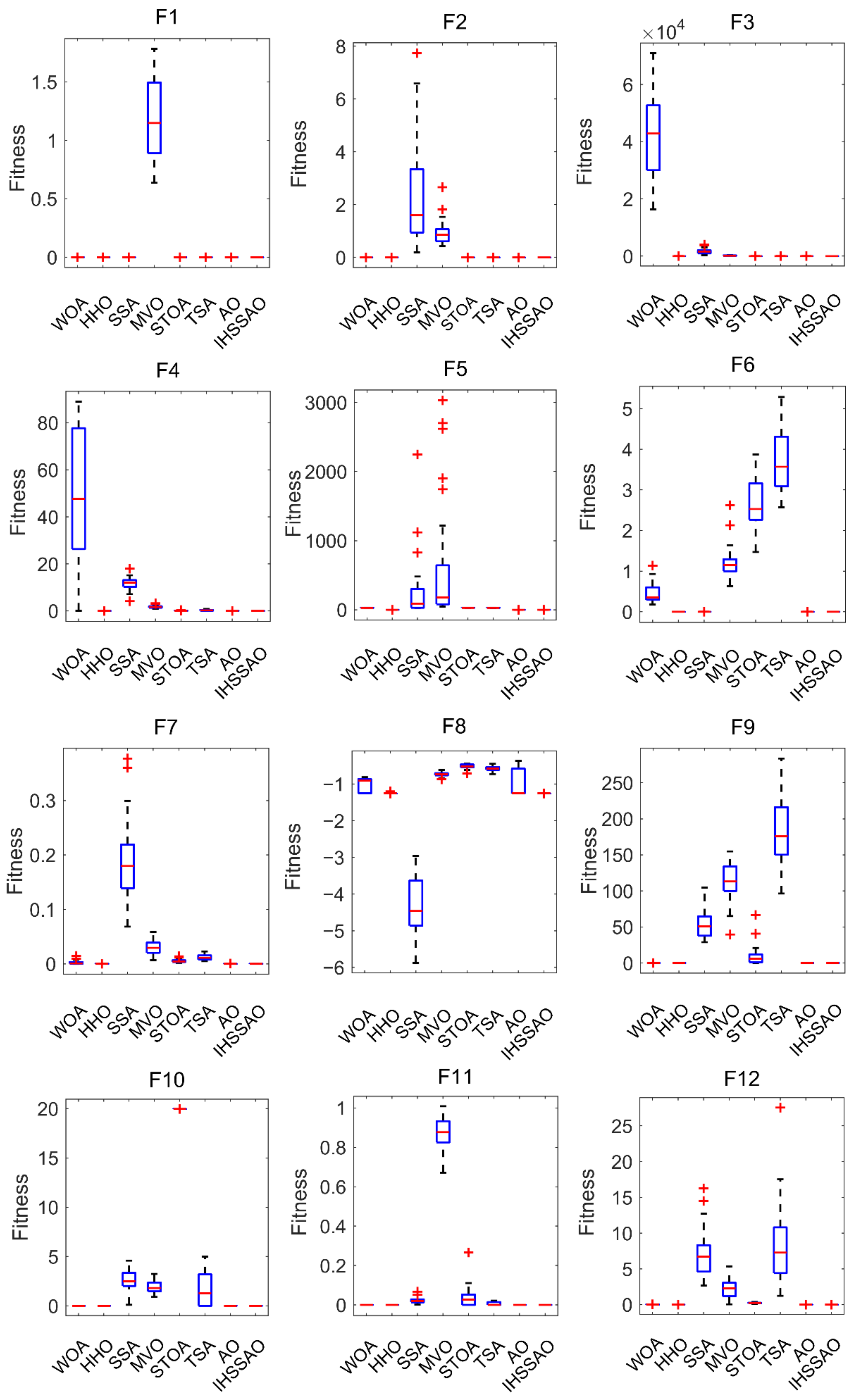
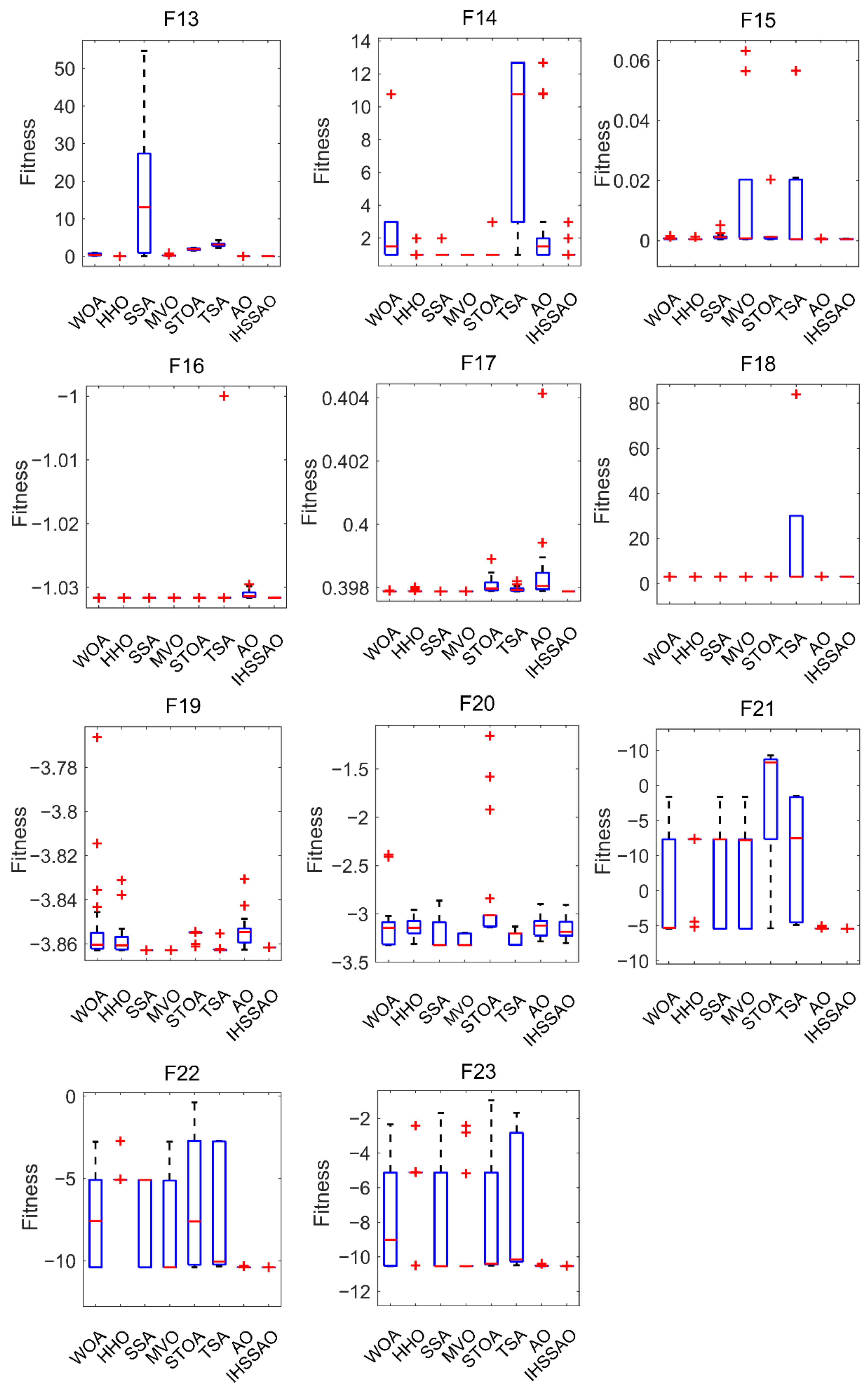
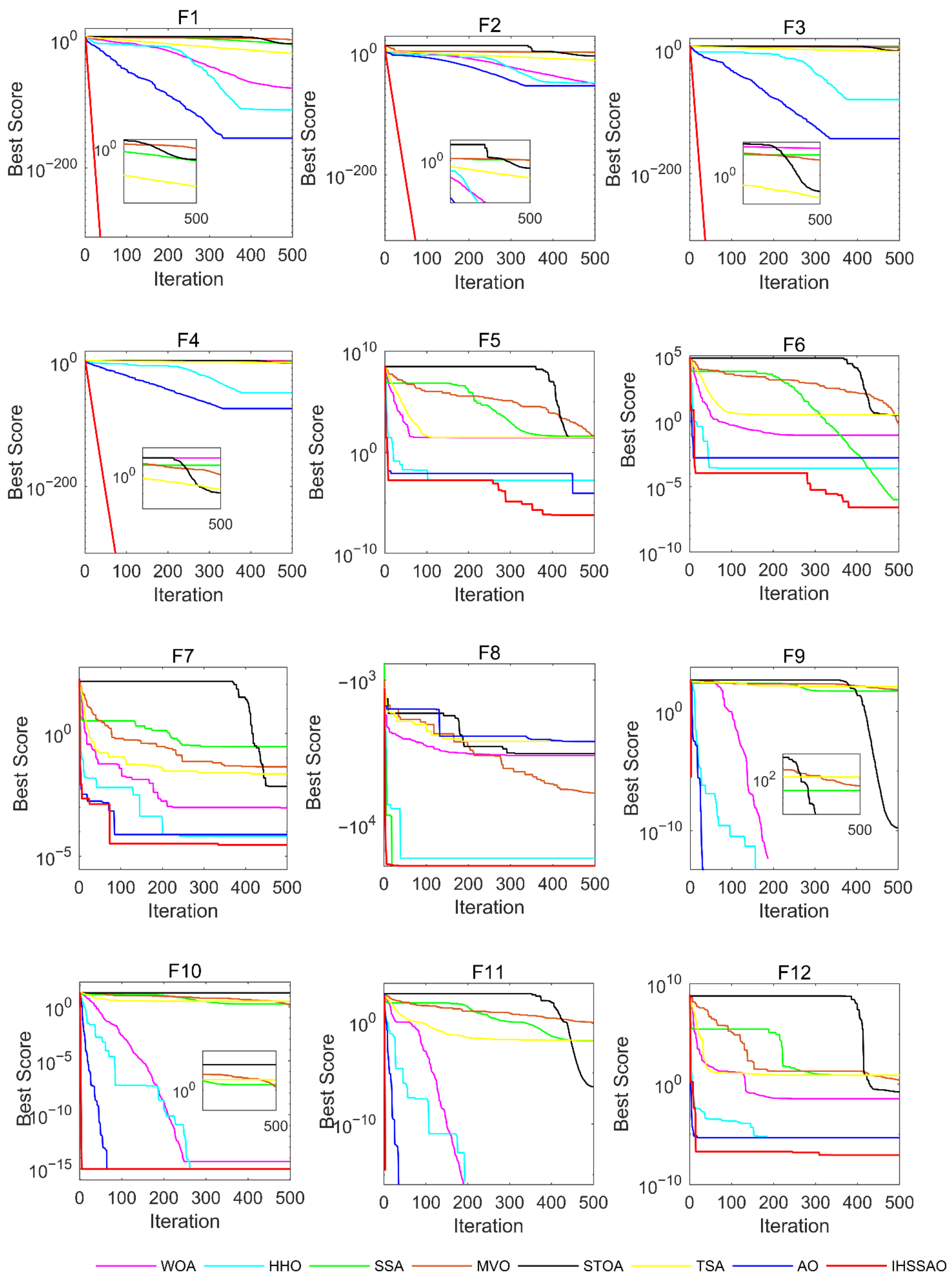
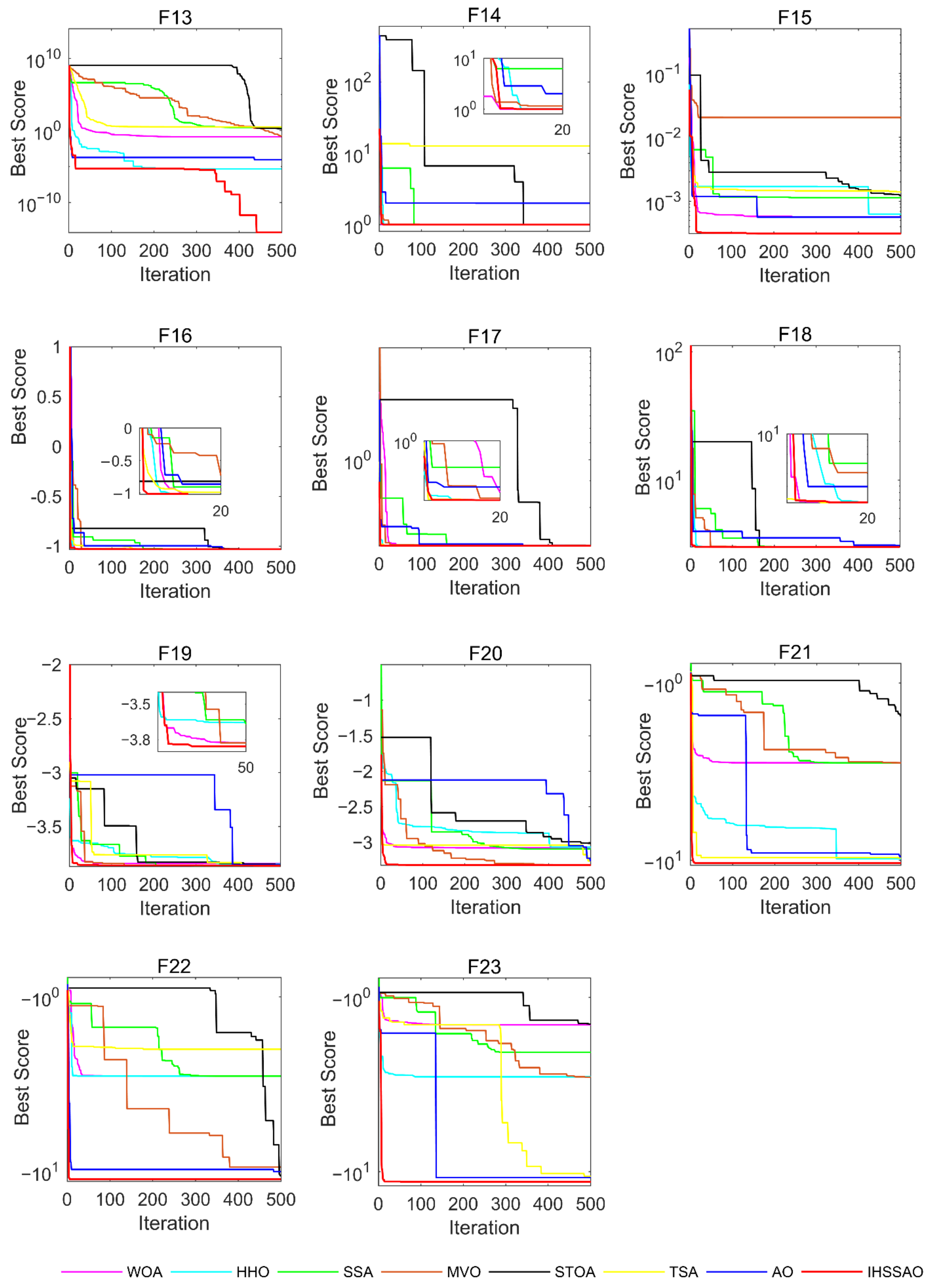
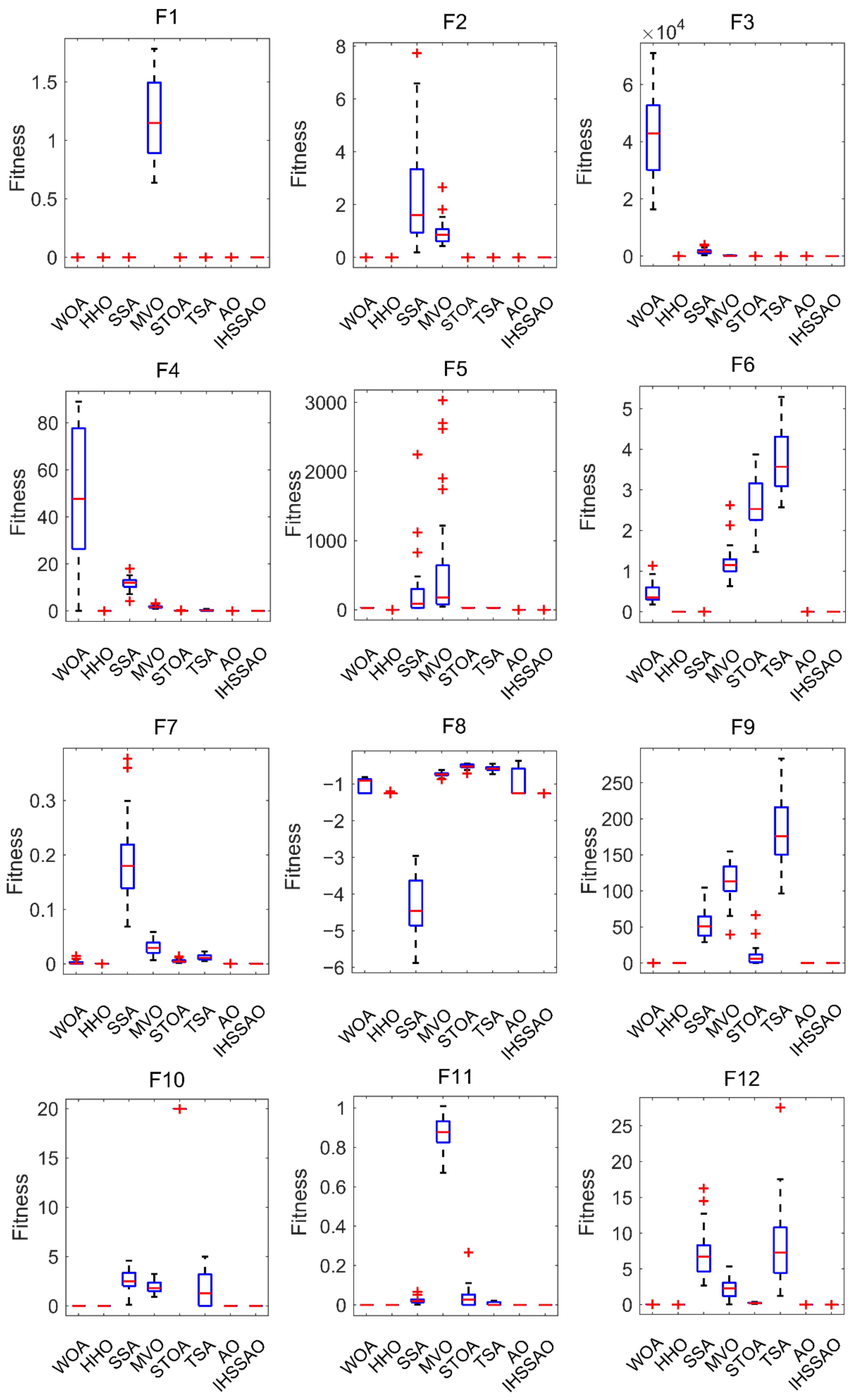
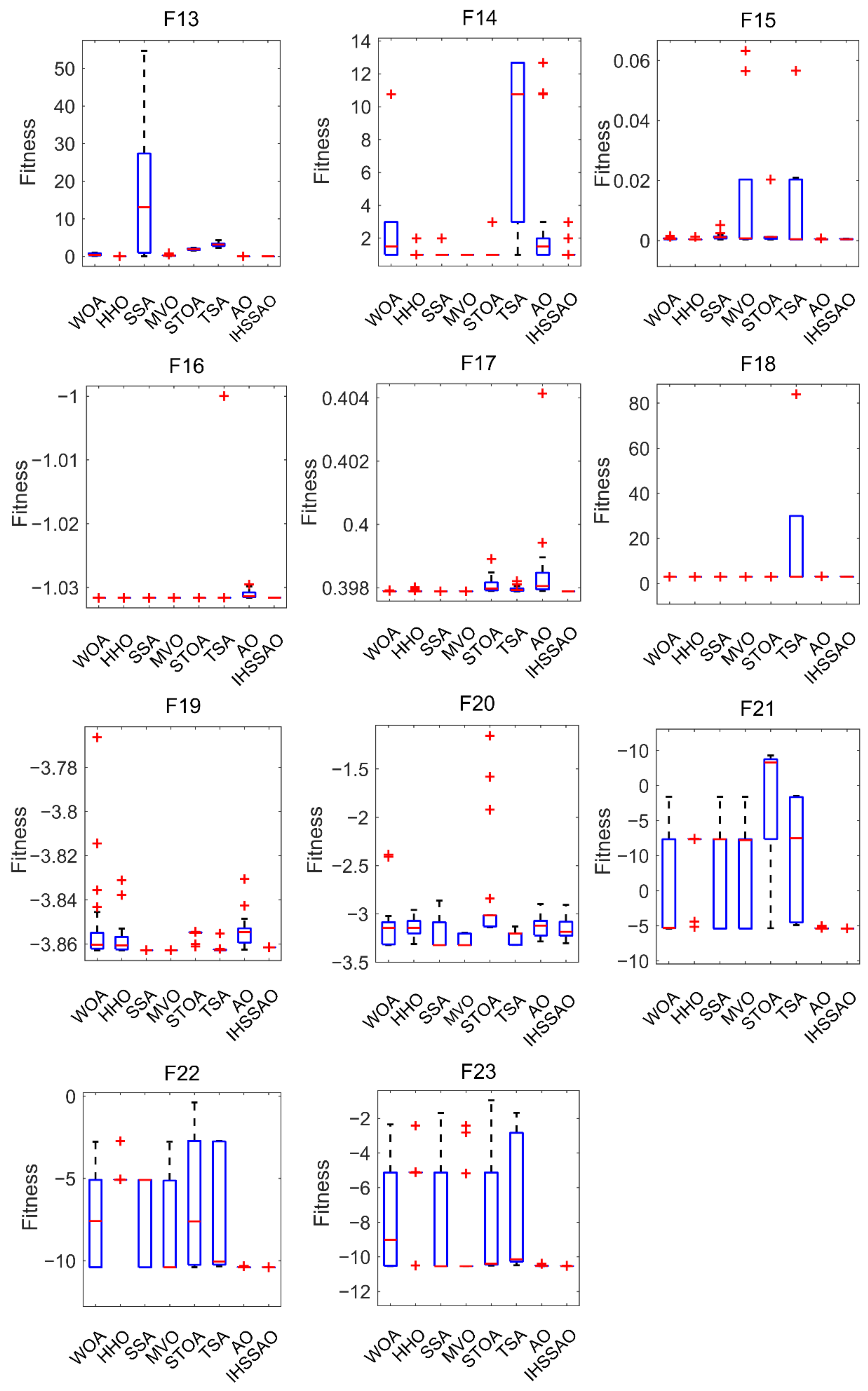
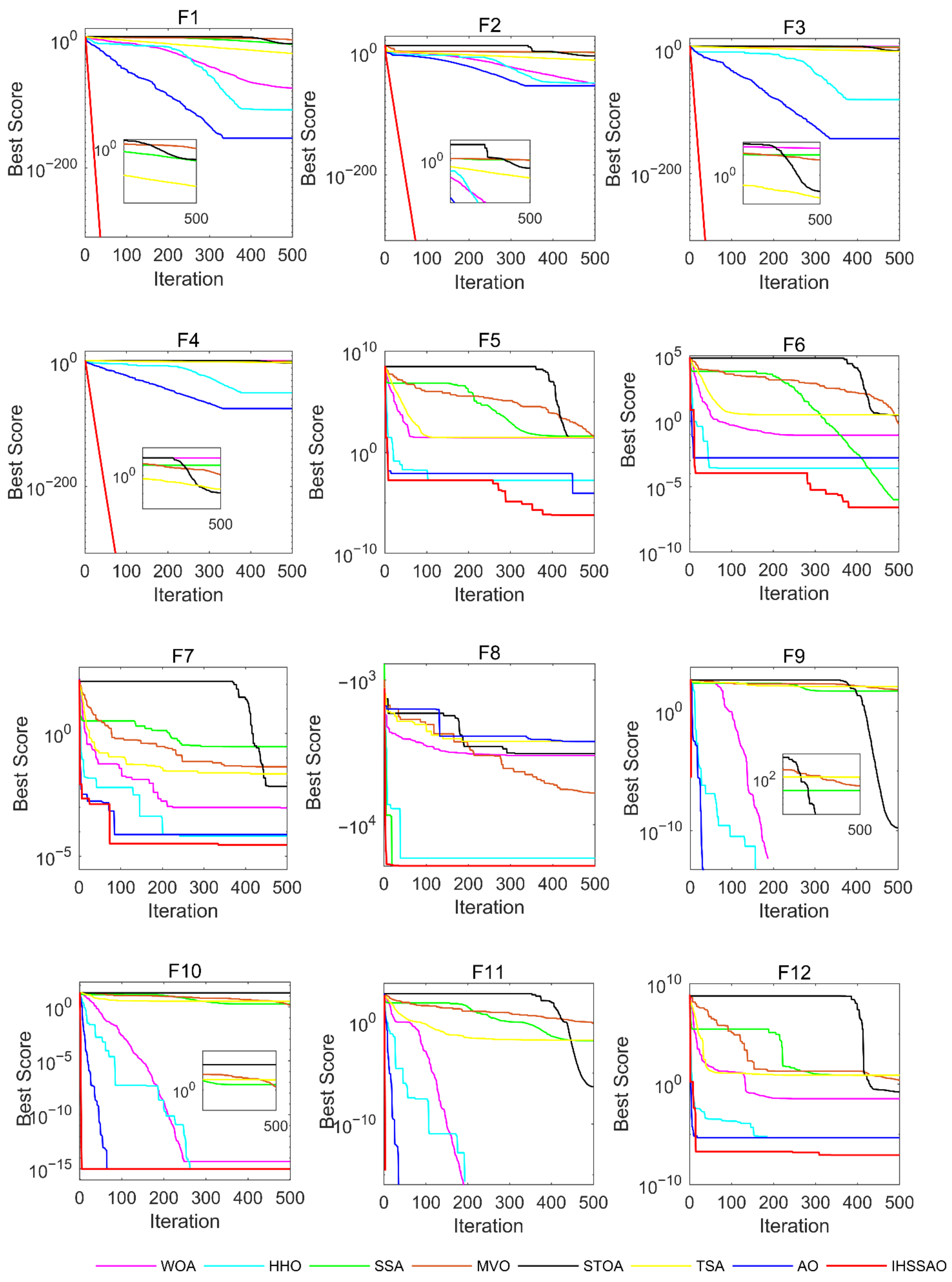
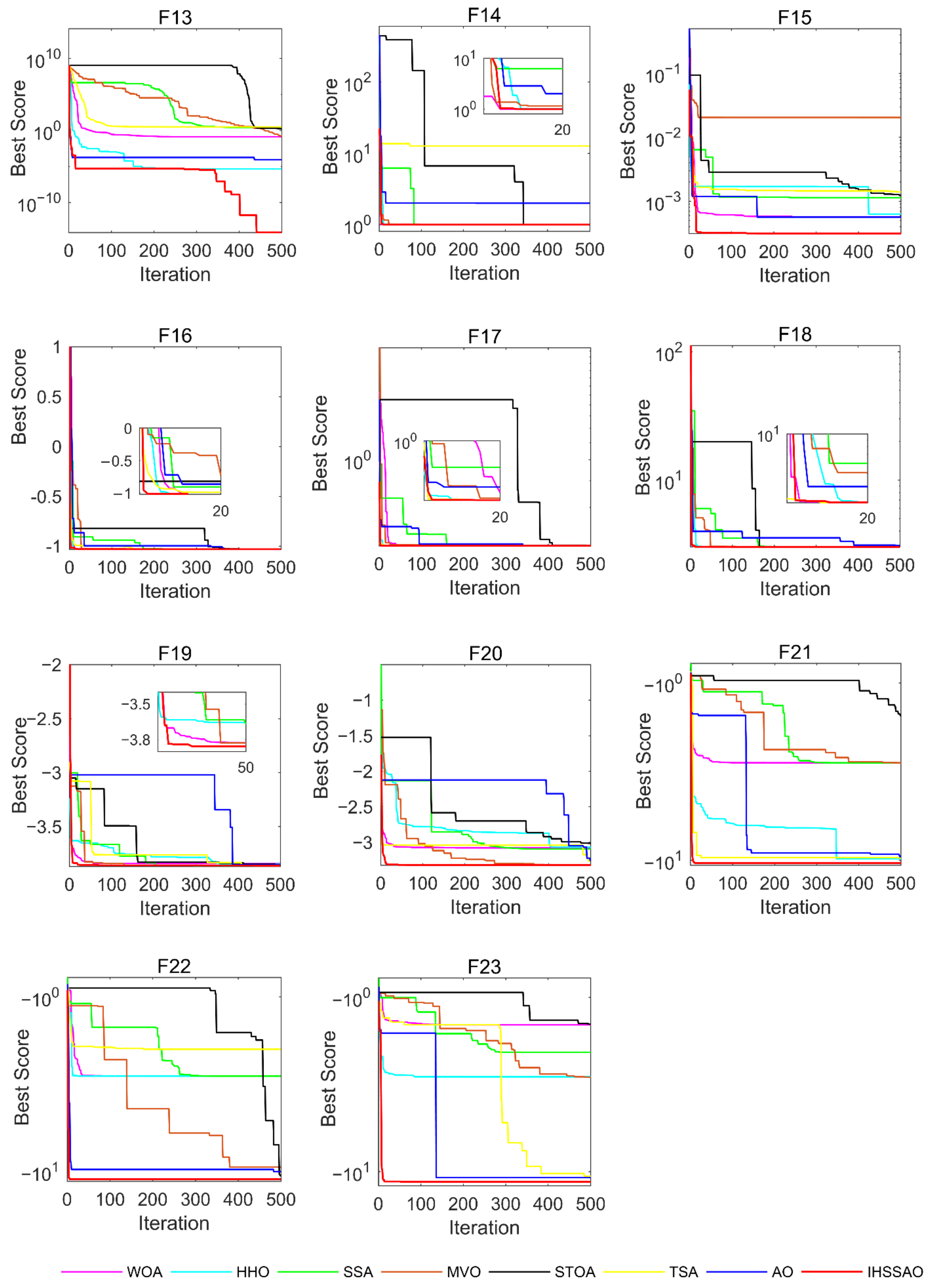
4.1.3. Comparison with IHSSAO and Other Algorithms
4.1.4. Scalability Test
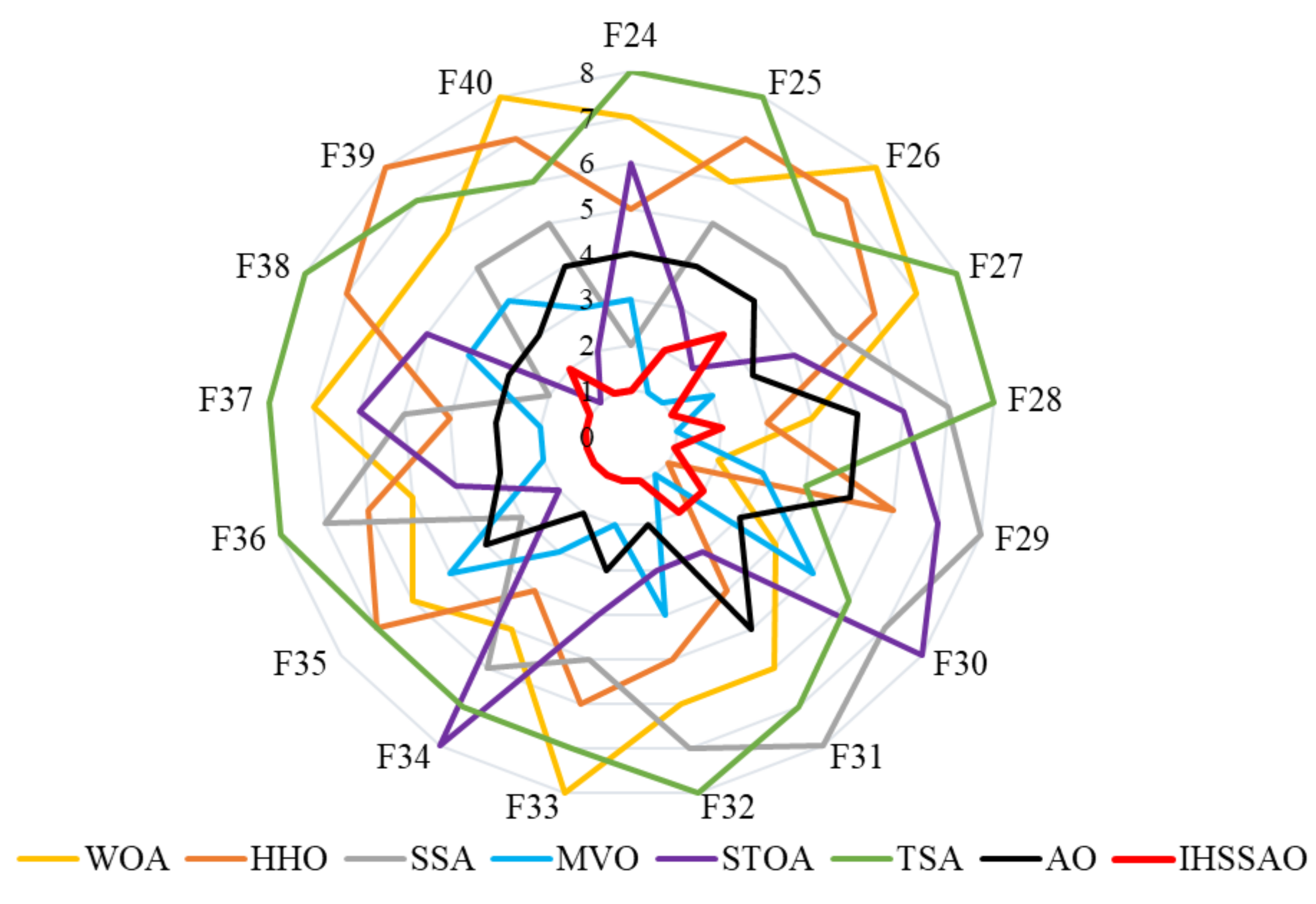
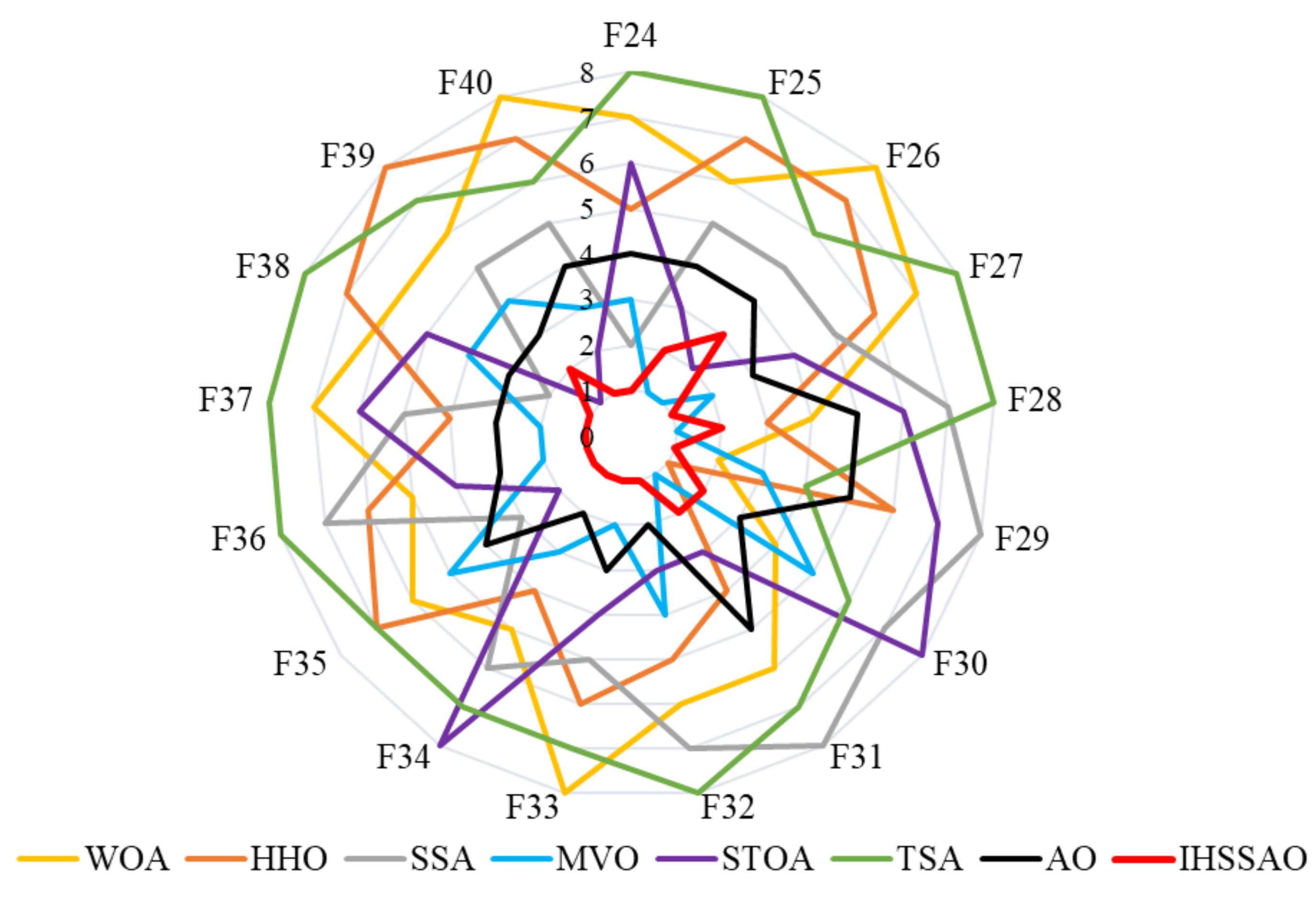
4.2. Experiment II: IEEE CEC2017 Test Functions
5. IHSSAO for Solving UAV Path Planning in Complex Terrain
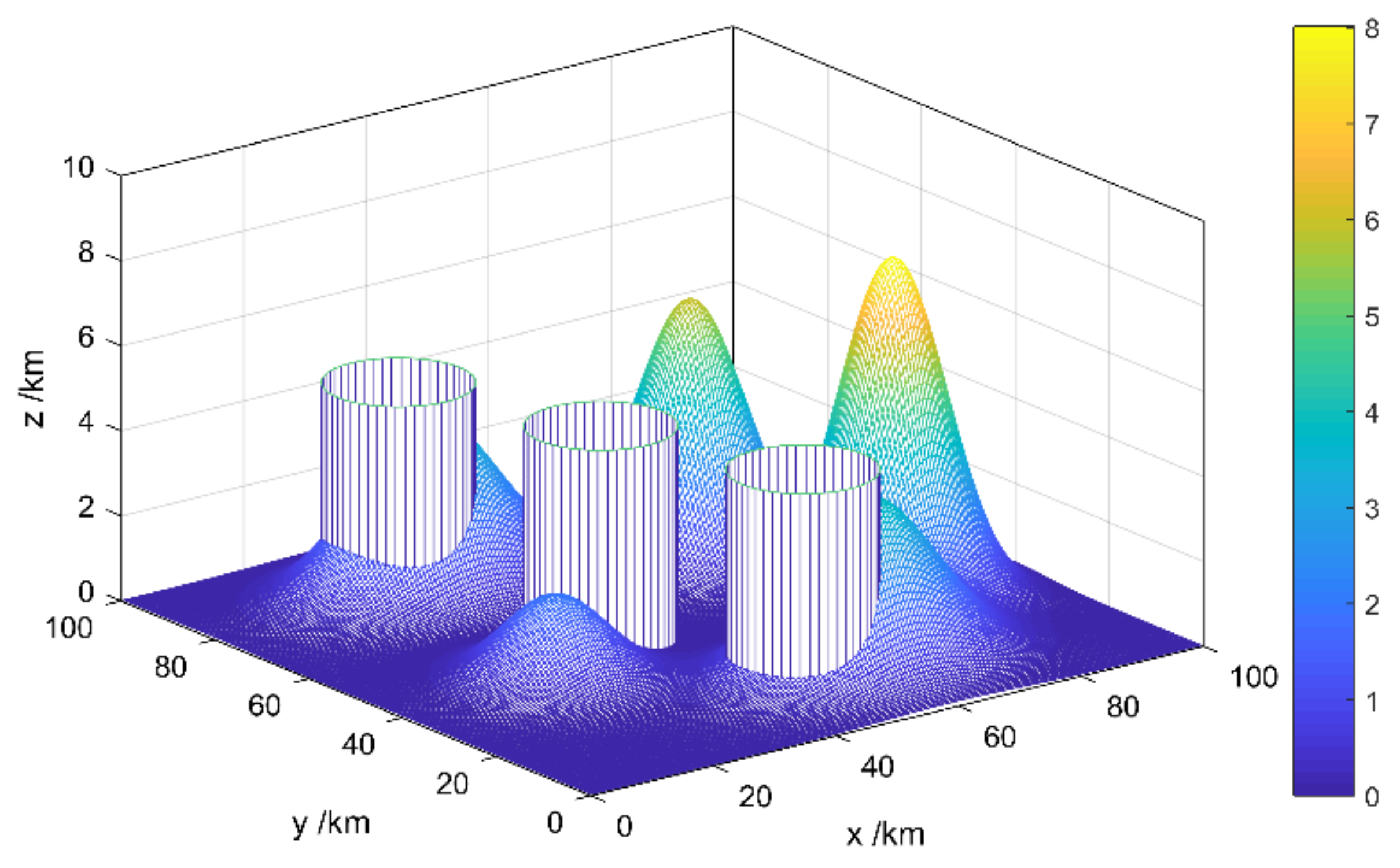
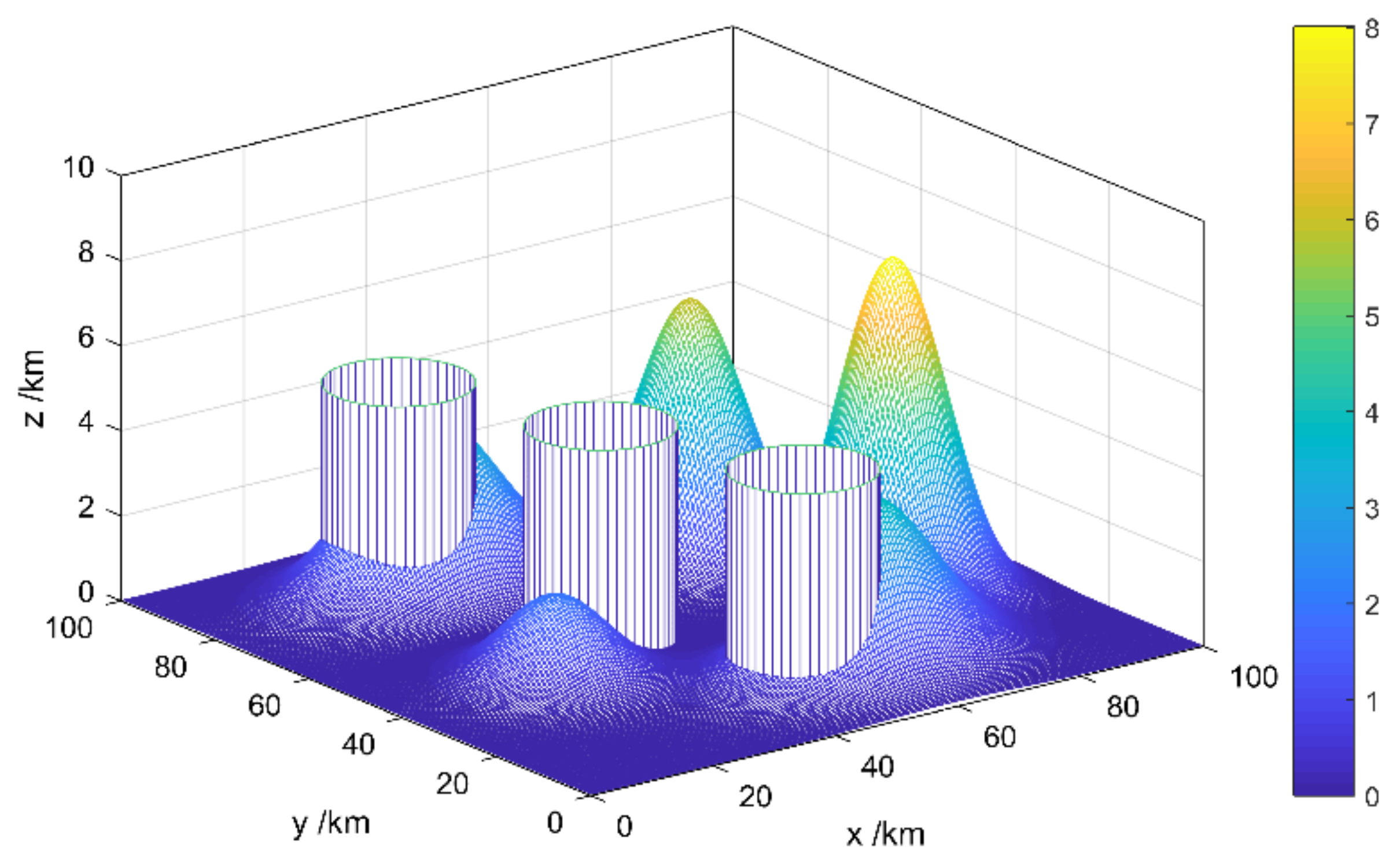
5.1. UAV Mission Environment Modeling
5.1.1. Terrain Constraints
5.1.2. Threat Constraints
5.2. UAV Path Planning Modeling
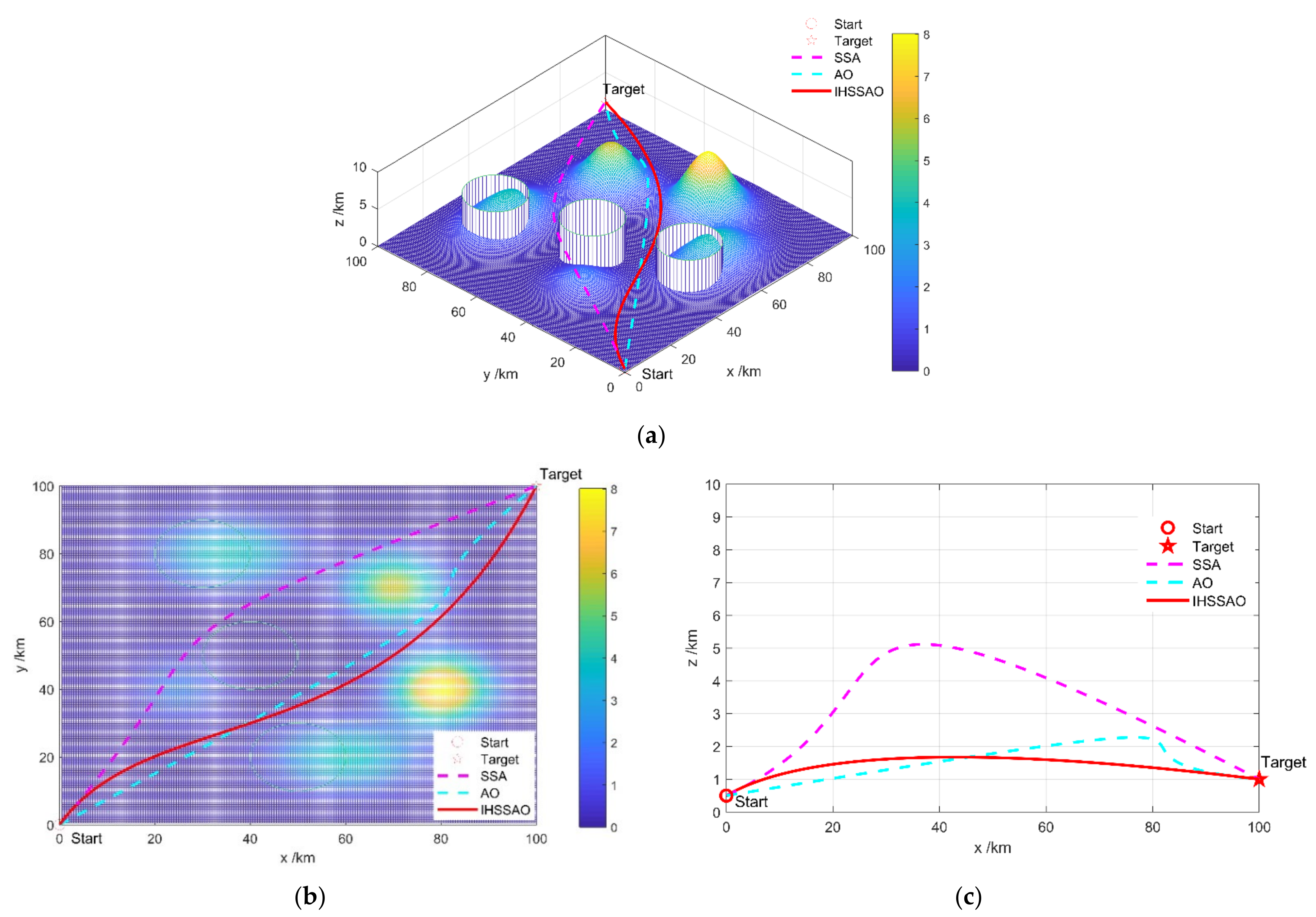
5.3. Simulation Results and Analysis of UAV Path Planning in Complex Terrain
5.3.1. Parameter Settings
5.3.2. Simulation Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, J.-S.; Lv, J.-X.; Yan, L.-J.; Weng, S.-W.; Chu, S.-C.; Xue, J.-K. Golden eagle optimizer with double learning strategies for 3D path planning of UAV in power inspection. Math. Comput. Simul. 2022, 193, 509–532. [Google Scholar] [CrossRef]
- Liu, G.Y.; Shu, C.; Liang, Z.W.; Peng, B.H.; Cheng, L.F. A Modified Sparrow Search Algorithm with Application in 3d Route Planning for UAV. Sensors 2021, 21, 1224. [Google Scholar] [CrossRef] [PubMed]
- Song, Q.S.; Li, S.B.; Yang, J.; Bai, Q.; Hu, J.J.; Zhang, X.X.; Zhang, A.S. Intelligent Optimization Algorithm-Based Path Planning for a Mobile Robot. Comput. Intell. Neurosci. 2021, 2021, 8025730. [Google Scholar] [CrossRef]
- Huang, C.; Fei, J.Y. UAV Path Planning Based on Particle Swarm Optimization with Global Best Path Competition. Int. J. Pattern Recognit. Artif. Intell. 2018, 32, 1859008. [Google Scholar] [CrossRef]
- Kobayashi, M.; Motoi, N. Local Path Planning: Dynamic Window Approach with Virtual Manipulators Considering Dynamic Obstacles. IEEE Access 2022, 10, 17018–17029. [Google Scholar] [CrossRef]
- Tang, Y.; Miao, Y.M.; Barnawi, A.; Alzahrani, B.; Alotaibi, R.; Hwang, K. A joint global and local path planning optimization for UAV task scheduling towards crowd air monitoring. Comput. Netw. 2021, 193, 107913. [Google Scholar] [CrossRef]
- Salama, O.A.A.; Eltaib, M.E.H.; Mohamed, H.A.; Salah, O. RCD: Radial Cell Decomposition Algorithm for Mobile Robot Path Planning. IEEE Access 2021, 9, 149982–149992. [Google Scholar] [CrossRef]
- Yuan, X.; Yuan, X.W.; Wang, X.H. Path Planning for Mobile Robot Based on Improved Bat Algorithm. Sensors 2021, 21, 4389. [Google Scholar] [CrossRef]
- Zhou, C.M.; Huang, B.D.; Franti, P. A review of motion planning algorithms for intelligent robots. J. Intell. Manuf. 2022, 33, 387–424. [Google Scholar] [CrossRef]
- Yang, S.X.; Meng, M. An efficient neural network approach to dynamic robot motion planning. Neural Netw. 2000, 13, 143–148. [Google Scholar] [CrossRef]
- Smart, W.D.; Kaelbling, L.P. Effective reinforcement learning for mobile robots. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 3404–3410. [Google Scholar]
- Mirjalili, S. The Ant Lion Optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H.L. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst.-Int. J. Esci. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Qu, C.Z.; Gai, W.D.; Zhong, M.Y.; Zhang, J. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning. Appl. Soft Comput. 2020, 89, 106099. [Google Scholar] [CrossRef]
- Lv, J.X.; Yan, L.J.; Chu, S.C.; Cai, Z.M.; Pan, J.S.; He, X.K.; Xue, J.K. A new hybrid algorithm based on golden eagle optimizer and grey wolf optimizer for 3D path planning of multiple UAVs in power inspection. Neural Comput. Appl. 2022. [Google Scholar] [CrossRef]
- Xiao, Y.; Sun, X.; Guo, Y.; Cui, H.; Wang, Y.; Li, J.; Li, S. An enhanced honey badger algorithm based on Lévy flight and refraction opposition-based learning for engineering design problems. J. Intell. Fuzzy Syst. 2022, 1–24. [Google Scholar] [CrossRef]
- Xiao, Y.; Sun, X.; Guo, Y.; Li, S.; Zhang, Y.; Wang, Y. An improved gorilla troops optimizer based on lens opposition-based learning and adaptive β-Hill climbing for global optimization. CMES-Comp. Model. Eng. Sci. 2022, 131, 815–850. [Google Scholar] [CrossRef]
- Huo, L.S.; Zhu, J.H.; Li, Z.M.; Ma, M.H. A Hybrid Differential Symbiotic Organisms Search Algorithm for UAV Path Planning. Sensors 2021, 21, 3037. [Google Scholar] [CrossRef]
- Ji, Y.S.; Zhao, X.C.; Hao, J.L. A Novel UAV Path Planning Algorithm Based on Double-Dynamic Biogeography-Based Learning Particle Swarm Optimization. Mob. Inf. Syst. 2022, 2022, 8519708. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Abd Elaziz, M.; Ewees, A.A.; Al-qaness, M.A.A.; Gandomi, A.H. Aquila Optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- AlRassas, A.M.; Al-qaness, M.A.A.; Ewees, A.A.; Ren, S.R.; Abd Elaziz, M.; Damasevicius, R.; Krilavicius, T. Optimized ANFIS Model Using Aquila Optimizer for Oil Production Forecasting. Processes 2021, 9, 1194. [Google Scholar] [CrossRef]
- Ma, L.; Li, J.; Zhao, Y. Population Forecast of China’s Rural Community Based on CFANGBM and Improved Aquila Optimizer Algorithm. Fractal Fract. 2021, 5, 190. [Google Scholar] [CrossRef]
- Kandan, M.; Krishnamurthy, A.; Selvi, S.A.M.; Sikkandar, M.Y.; Aboamer, M.A.; Tamilvizhi, T. Quasi oppositional Aquila optimizer-based task scheduling approach in an IoT enabled cloud environment. J. Supercomput. 2022, 78, 10176–10190. [Google Scholar] [CrossRef]
- Fan, Q.; Chen, Z.J.; Zhang, W.; Fang, X.H. ESSAWOA: Enhanced Whale Optimization Algorithm integrated with Salp Swarm Algorithm for global optimization. Eng. Comput. 2022, 38, 797–814. [Google Scholar] [CrossRef]
- Li, Y.C.; Han, M.X.; Guo, Q.L. Modified Whale Optimization Algorithm Based on Tent Chaotic Mapping and Its Application in Structural Optimization. Ksce J. Civ. Eng. 2020, 24, 3703–3713. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Yang, R.N.; Li, H.Y.; Fang, Y.H.; Huang, Z.Y.; Zhang, Y. Antlion optimizer algorithm based on chaos search and its application. J. Syst. Eng. Electron. 2019, 30, 352–365. [Google Scholar] [CrossRef]
- Huang, Y.H.; Zhang, J.; Wei, W.; Qin, T.; Fan, Y.C.; Luo, X.M.; Yang, J. Research on Coverage Optimization in a WSN Based on an Improved COOT Bird Algorithm. Sensors 2022, 22, 3383. [Google Scholar] [CrossRef]
- Khajehzadeh, M.; Taha, M.R.; Eslami, M. Opposition-based firefly algorithm for earth slope stability evaluation. China Ocean. Eng. 2014, 28, 713–724. [Google Scholar] [CrossRef]
- Wang, Z.S.; Ding, H.W.; Yang, J.J.; Wang, J.; Li, B.; Yang, Z.J.; Hou, P. Advanced orthogonal opposition-based learning-driven dynamic salp swarm algorithm: Framework and case studies. IET Control. Theory Appl. 2022, 16, 945–971. [Google Scholar] [CrossRef]
- Zhang, D.M.; Xu, H.; Wang, Y.R.; Song, T.T.; Wang, L.Q. Whale optimization algorithm for embedded Circle mapping and onedimensional oppositional learning based small hole imaging. Kongzhi Yu Juece/Control. Decis. 2021, 36, 1173–1180. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2015, 27, 495–513. [Google Scholar] [CrossRef]
- Dhiman, G.; Kaur, A. STOA: A bio-inspired based optimization algorithm for industrial engineering problems. Eng. Appl. Artif. Intell. 2019, 82, 148–174. [Google Scholar] [CrossRef]
- Kaur, S.; Awasthi, L.K.; Sangal, A.L.; Dhiman, G. Tunicate swarm algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Name | Dim | Range | Fmin |
|---|---|---|---|---|
| Sphere | 30 | [−100, 100] | 0 | |
| Schwefel 2.22 | 30 | [−10, 10] | 0 | |
| Schwefel 1.2 | 30 | [−100, 100] | 0 | |
| Schwefel 2.21 | 30 | [−100, 100] | 0 | |
| Rosenbrock | 30 | [−30, 30] | 0 | |
| Step | 30 | [−100, 100] | 0 | |
| Quartic | 30 | [−1.28, 1.28] | 0 |
| Function | Name | Dim | Range | Fmin |
|---|---|---|---|---|
| Schwefel 2.26 | 30 | [−500, 500] | −418.9829 × Dim | |
| Rastrigin | 30 | [−5.12, 5.12] | 0 | |
| Ackley | 30 | [−32, 32] | 0 | |
| Griewank | 30 | [−600, 600] | 0 | |
| Penalized | 30 | [−50, 50] | 0 | |
| Penalized2 | 30 | [−50, 50] | 0 |
| Function | Name | Dim | Range | Fmin |
|---|---|---|---|---|
| Foxholes | 2 | [−65, 65] | 0.998 | |
| Kowalik | 4 | [−5, 5] | 0.00030 | |
| Six-hump Camel Back | 2 | [−5, 5] | −1.0316 | |
| Branin | 2 | [−5, 5] | 0.398 | |
| Goldstein Price | 2 | [−2, 2] | 3 | |
| Hartman 3 | 3 | [−1, 2] | −3.8628 | |
| Hartman 6 | 6 | [0, 1] | −3.32 | |
| Langermann 5 | 4 | [0, 10] | −10.1532 | |
| Langermann 7 | 4 | [0, 10] | −10.4028 | |
| Langermann 10 | 4 | [0, 10] | −10.5363 |
| Algorithm | Parameters |
|---|---|
| WOA [13] | |
| HHO [14] | |
| SSA [16] | |
| MVO [34] | |
| STOA [35] | |
| TSA [36] | |
| AO [23] |
| Metric | WOA | HHO | SSA | MVO | STOA | TSA | AO | IHSSAO | |
|---|---|---|---|---|---|---|---|---|---|
| Avg | 3.07 × 10−72 | 3.72 × 10−94 | 1.53 × 10−7 | 1.17 × 100 | 8.28 × 10−7 | 2.46 × 10−21 | 1.56 × 10−104 | 0.00 × 100 | |
| Std | 1.37 × 10−71 | 1.84 × 10−93 | 1.29 × 10−7 | 3.35 × 10−1 | 1.41 × 10−6 | 5.54 × 10−21 | 8.52 × 10−104 | 0.00 × 100 | |
| Avg | 2.06 × 10−51 | 3.17 × 10−50 | 2.32 × 100 | 9.27 × 10−1 | 7.97 × 10−6 | 1.06 × 10−13 | 8.53 × 10−57 | 0.00 × 100 | |
| Std | 8.00 × 10−51 | 9.82 × 10−50 | 1.95 × 100 | 4.70 × 10−1 | 6.96 × 10−6 | 1.29 × 10−13 | 3.76 × 10−56 | 0.00 × 100 | |
| Avg | 4.24 × 104 | 1.07 × 10−76 | 1.72 × 103 | 1.92 × 102 | 8.82 × 10−2 | 8.91 × 10−5 | 1.58 × 10−101 | 0.00 × 100 | |
| Std | 1.51 × 104 | 5.82 × 10−76 | 9.89 × 102 | 6.60 × 101 | 1.57 × 10−1 | 2.42 × 10−4 | 8.63 × 10−101 | 0.00 × 100 | |
| Avg | 4.89 × 101 | 3.43 × 10−47 | 1.15 × 101 | 1.81 × 100 | 6.38 × 10−2 | 2.70 × 10−1 | 9.68 × 10−54 | 0.00 × 100 | |
| Std | 2.95 × 101 | 1.87 × 10−46 | 2.81 × 100 | 6.14 × 10−1 | 8.84 × 10−2 | 2.29 × 10−1 | 3.16 × 10−53 | 0.00 × 100 | |
| Avg | 2.80 × 101 | 1.02 × 10−2 | 2.76 × 102 | 6.11 × 102 | 2.84 × 101 | 2.81 × 101 | 5.80 × 10−3 | 2.49 × 10−5 | |
| Std | 5.37 × 10−1 | 1.14 × 10−2 | 4.50 × 102 | 8.88 × 102 | 4.74 × 10−1 | 7.85 × 10−1 | 1.05 × 10−2 | 1.11 × 10−4 | |
| Avg | 4.42 × 10−1 | 7.32 × 10−5 | 4.68 × 10−7 | 1.22 × 100 | 2.65 × 100 | 3.74 × 100 | 7.58 × 10−4 | 2.45 × 10−5 | |
| Std | 2.25 × 10−1 | 8.16 × 10−5 | 1.41 × 10−6 | 4.04 × 10−1 | 6.06 × 10−1 | 7.28 × 10−1 | 1.69 × 10−3 | 3.68 × 10−5 | |
| Avg | 2.53 × 10−3 | 1.59 × 10−4 | 1.89 × 10−1 | 3.02 × 10−2 | 5.66 × 10−3 | 1.20 × 10−2 | 1.08 × 10−4 | 4.30 × 10−5 | |
| Std | 3.51 × 10−3 | 1.20 × 10−4 | 7.17 × 10−2 | 1.29 × 10−2 | 3.24 × 10−3 | 4.71 × 10−3 | 1.14 × 10−4 | 3.86 × 10−5 | |
| Avg | −10,228.40 | −12,542.39 | −43,759.37 | −7419.26 | −5252.57 | −5819.64 | −9949.91 | −12,569.42 | |
| Std | 1.86 × 103 | 1.11 × 102 | 7.84 × 103 | 6.31 × 102 | 6.62 × 102 | 6.81 × 102 | 3.65 × 103 | 1.30 × 10−1 | |
| Avg | 3.79 × 10−15 | 0.00 × 100 | 5.29 × 101 | 1.12 × 102 | 9.92 × 100 | 1.81 × 102 | 0.00 × 100 | 0.00 × 100 | |
| Std | 1.44 × 10−14 | 0.00 × 100 | 1.81 × 101 | 2.56 × 101 | 1.38 × 101 | 4.76 × 101 | 0.00 × 100 | 0.00 × 100 | |
| Avg | 4.20 × 10−15 | 8.88 × 10−16 | 2.63 × 100 | 1.96 × 100 | 2.00 × 101 | 1.66 × 100 | 8.88 × 10−16 | 8.88 × 10−16 | |
| Std | 2.46 × 10−15 | 0.00 × 100 | 9.37 × 10−1 | 6.16 × 10−1 | 1.41 × 10−3 | 1.73 × 100 | 0.00 × 100 | 0.00 × 100 | |
| Avg | 0.00 × 100 | 0.00 × 100 | 2.21 × 10−2 | 8.73 × 10−1 | 3.64 × 10−2 | 7.19 × 10−3 | 0.00 × 100 | 0.00 × 100 | |
| Std | 0.00 × 100 | 0.00 × 100 | 1.61 × 10−2 | 7.88 × 10−2 | 5.36 × 10−2 | 8.13 × 10−3 | 0.00 × 100 | 0.00 × 100 | |
| Avg | 2.14 × 10−2 | 6.25 × 10−6 | 7.20 × 100 | 2.24 × 100 | 2.34 × 10−1 | 8.07 × 100 | 2.95 × 10−6 | 3.76 × 10−7 | |
| Std | 1.34 × 10−2 | 9.13 × 10−6 | 3.23 × 100 | 1.34 × 100 | 7.20 × 10−2 | 5.44 × 100 | 5.55 × 10−6 | 9.21 × 10−7 | |
| Avg | 5.03 × 10−1 | 9.14 × 10−5 | 1.61 × 101 | 2.17 × 10−1 | 1.91 × 100 | 3.13 × 100 | 1.50 × 10−5 | 2.17 × 10−6 | |
| Std | 2.76 × 10−1 | 1.61 × 10−4 | 1.52 × 101 | 1.40 × 10−1 | 2.03 × 10−1 | 5.68 × 10−1 | 2.45 × 10−5 | 1.00 × 10−5 | |
| Avg | 2.96 × 100 | 1.10 × 100 | 1.30 × 100 | 9.98 × 10−1 | 1.46 × 100 | 7.93 × 100 | 2.89 × 100 | 1.09 × 100 | |
| Std | 3.23 × 100 | 3.03 × 10−1 | 5.92 × 10−1 | 3.66 × 10−11 | 8.54 × 10−1 | 4.75 × 100 | 3.60 × 100 | 3.99 × 10−1 | |
| Avg | 6.23 × 10−4 | 3.79 × 10−4 | 1.21 × 10−3 | 1.11 × 10−2 | 1.65 × 10−3 | 7.66 × 10−3 | 4.89 × 10−4 | 2.78 × 10−4 | |
| Std | 2.69 × 10−4 | 1.69 × 10−4 | 8.83 × 10−4 | 1.82 × 10−2 | 3.55 × 10−3 | 1.29 × 10−2 | 7.91 × 10−5 | 3.89 × 10−5 | |
| Avg | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0295 | −1.0311 | −1.0316 | |
| Std | 3.16 × 10−9 | 1.55 × 10−9 | 2.89 × 10−14 | 4.02 × 10−7 | 2.57 × 10−6 | 8.02 × 10−3 | 5.78 × 10−4 | 5.32 × 10−15 | |
| Avg | 0.39789 | 0.39790 | 0.39789 | 0.39789 | 0.39808 | 0.39789 | 0.39841 | 0.39795 | |
| Std | 7.07 × 10−6 | 2.86 × 10−5 | 1.55 × 10−14 | 5.72 × 10−7 | 2.31 × 10−4 | 7.35 × 10−5 | 1.14 × 10−3 | 7.61 × 10−15 | |
| Avg | 3.0001 | 3.0000 | 3.0000 | 3.0000 | 3.0001 | 19.2000 | 3.0417 | 3.0000 | |
| Std | 1.21 × 10−4 | 3.62 × 10−7 | 1.79 × 10−13 | 2.46 × 10−6 | 8.29 × 10−5 | 3.04 × 101 | 4.91 × 10−4 | 2.12 × 10−10 | |
| Avg | −3.8536 | −3.8583 | −3.8628 | −3.8628 | −3.8551 | −3.8624 | −3.8547 | −3.8628 | |
| Std | 1.94 × 10−2 | 7.12 × 10−3 | 9.15 × 10−6 | 4.94 × 10−6 | 1.49 × 10−3 | 1.36 × 10−3 | 6.47 × 10−3 | 4.65 × 10−5 | |
| Avg | −3.1361 | −3.1408 | −3.2078 | −3.2737 | −2.8436 | −3.2517 | −3.1270 | −3.1515 | |
| Std | 2.28 × 10−1 | 9.11 × 10−2 | 1.44 × 10−1 | 6.02 × 10−2 | 5.71 × 10−1 | 6.74 × 10−2 | 1.34 × 10−1 | 1.06 × 10−1 | |
| Avg | −8.1795 | −5.3744 | −7.3534 | −6.6234 | −2.8881 | −6.1994 | −10.1360 | −10.1500 | |
| Std | 2.63 × 100 | 1.23 × 100 | 2.70 × 100 | 3.07 × 100 | 3.58 × 100 | 3.20 × 100 | 3.63 × 10−2 | 9.98 × 10−3 | |
| Avg | −7.4821 | −5.0033 | −7.3910 | −8.6779 | −6.4799 | −7.1649 | −10.3930 | −10.4012 | |
| Std | 2.99 × 100 | 4.30 × 10−1 | 2.68 × 100 | 2.97 × 100 | 4.10 × 100 | 3.54 × 100 | 1.86 × 10−2 | 3.49 × 10−3 | |
| Avg | −7.5302 | −5.2127 | −7.5969 | −9.2142 | −8.0707 | −7.6860 | −10.5180 | −10.5343 | |
| Std | 3.19 × 100 | 1.11 × 100 | 3.32 × 100 | 2.75 × 100 | 3.78 × 100 | 3.65 × 100 | 3.49 × 10−2 | 5.42 × 10−3 |
| Fn | IHSSAO vs. WOA | IHSSAO vs. HHO | IHSSAO vs. SSA | IHSSAO vs. MVO | IHSSAO vs. STOA | IHSSAO vs. TSA | IHSSAO vs. AO |
|---|---|---|---|---|---|---|---|
| 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | |
| 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | |
| 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | |
| 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | |
| 3.02 × 10−11 | 2.87 × 10−10 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 1.17 × 10−9 | |
| 3.02 × 10−11 | 1.86 × 10−6 | 3.26 × 10−1 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 9.51 × 10−6 | |
| 8.10 × 10−10 | 1.34 × 10−5 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 2.32 × 10−2 | |
| 2.72 × 10−11 | 6.92 × 10−5 | 2.72 × 10−11 | 2.72 × 10−11 | 2.72 × 10−11 | 2.72 × 10−11 | 2.72 × 10−11 | |
| 1.61 × 10−5 | NaN | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | NaN | |
| 1.09 × 10−8 | NaN | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | NaN | |
| NaN | NaN | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.27 × 10−5 | NaN | |
| 3.02 × 10−11 | 3.09 × 10−6 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 1.87 × 10−5 | |
| 3.02 × 10−11 | 4.44 × 10−7 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 4.94 × 10−5 | |
| 2.38 × 10−3 | 6.97 × 10−3 | 4.67 × 10−8 | 2.83 × 10−8 | 9.79 × 10−5 | 2.15 × 10−10 | 8.56 × 10−4 | |
| 1.03 × 10−3 | 3.96 × 10−8 | 1.10 × 10−8 | 5.46 × 10−9 | 1.03 × 10−6 | 1.37 × 10−6 | 3.11 × 10−3 | |
| 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 7.47 × 10−10 | 7.47 × 10−10 | |
| 1.21 × 10−12 | 7.47 × 10−10 | 1.16 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | |
| 4.57 × 10−9 | 3.34 × 10−11 | 3.02 × 10−11 | 4.20 × 10−10 | 3.65 × 10−8 | 7.73 × 10−6 | 1.91 × 10−1 | |
| 1.89 × 10−2 | 3.50 × 10−1 | 1.72 × 10−12 | 1.72 × 10−12 | 1.72 × 10−12 | 4.56 × 10−11 | 1.67 × 10−8 | |
| 5.59 × 10−5 | 3.71 × 10−3 | 3.03 × 10−2 | 3.16 × 10−5 | 5.97 × 10−5 | 1.44 × 10−3 | 4.29 × 10−3 | |
| 8.15 × 10−11 | 2.72 × 10−11 | 6.62 × 10−10 | 3.39 × 10−8 | 2.72 × 10−11 | 2.72 × 10−11 | 1.57 × 10−8 | |
| 2.37 × 10−10 | 3.02 × 10−11 | 3.79 × 10−10 | 1.81 × 10−8 | 3.69 × 10−11 | 3.02 × 10−11 | 1.78 × 10−4 | |
| 2.92 × 10−9 | 3.02 × 10−11 | 6.63 × 10−10 | 1.62 × 10−1 | 3.02 × 10−11 | 3.02 × 10−11 | 6.74 × 10−6 | |
| + | 22 | 19 | 22 | 22 | 23 | 23 | 19 |
| = | 1 | 3 | 0 | 0 | 0 | 0 | 3 |
| − | 0 | 1 | 1 | 1 | 0 | 0 | 1 |
| 50 | 100 | 500 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| SSA | AO | IHSSAO | SSA | AO | IHSSAO | SSA | AO | IHSSAO | |
| 7.81 × 10−1 | 3.02 × 10−103 | 0.00 × 100 | 1.44 × 103 | 5.05 × 10−100 | 0.00 × 100 | 9.75 × 104 | 1.52 × 10−100 | 0.00 × 100 | |
| 8.85 × 100 | 2.18 × 10−52 | 0.00 × 100 | 4.79 × 101 | 1.61 × 10−61 | 0.00 × 100 | 5.38 × 102 | 3.90 × 10−53 | 0.00 × 100 | |
| 1.00 × 104 | 3.56 × 10−103 | 0.00 × 100 | 5.46 × 104 | 6.3974 × 10−103 | 0.00 × 100 | 1.42 × 106 | 4.36 × 10−94 | 0.00 × 100 | |
| 1.93 × 101 | 5.45 × 10−60 | 0.00 × 100 | 2.84 × 101 | 2.37 × 10−58 | 0.00 × 100 | 4.06 × 101 | 4.93 × 10−53 | 0.00 × 100 | |
| 1.94 × 103 | 6.82 × 10−3 | 1.96 × 10−5 | 1.87 × 105 | 1.02 × 10−2 | 1.28 × 10−3 | 3.66 × 107 | 9.30 × 10−2 | 2.71 × 10−3 | |
| 9.78 × 10−1 | 8.21 × 10−4 | 4.21 × 10−5 | 1.47 × 103 | 2.41 × 10−4 | 5.14 × 10−5 | 9.44 × 104 | 5.29 × 10−4 | 9.14 × 10−5 | |
| 6.31 × 10−1 | 8.95 × 10−3 | 8.57 × 10−5 | 2.71 × 100 | 1.00 × 10−4 | 6.02 × 10−5 | 2.97 × 102 | 1.32 × 10−4 | 6.47 × 10−5 | |
| −66,521.07 | −9938.43 | −20,948.97 | −136,320.92 | −10,996.51 | −41,897.78 | −375,776.05 | −8215.47 | −209,486.77 | |
| 8.88 × 101 | 0.00 × 100 | 0.00 × 100 | 2.48 × 102 | 0.00 × 100 | 0.00 × 100 | 3.17 × 103 | 0.00 × 100 | 0.00 × 100 | |
| 4.63 × 100 | 8.88 × 10−16 | 8.88 × 10−16 | 1.02 × 101 | 8.88 × 10−16 | 8.88 × 10−16 | 1.43 × 101 | 8.88 × 10−16 | 8.88 × 10−16 | |
| 4.94 × 10−1 | 0.00 × 100 | 0.00 × 100 | 1.46 × 101 | 0.00 × 100 | 0.00 × 100 | 8.52 × 102 | 0.00 × 100 | 0.00 × 100 | |
| 1.43 × 101 | 4.86 × 10−6 | 1.65 × 10−7 | 3.50 × 101 | 2.18 × 10−6 | 3.64 × 10−7 | 1.61 × 106 | 7.83 × 10−6 | 5.47 × 10−7 | |
| 7.59 × 101 | 3.76 × 10−5 | 1.77 × 10−5 | 7.61 × 103 | 4.84 × 10−5 | 7.71 × 10−6 | 3.47 × 107 | 3.46 × 10−4 | 8.40 × 10−6 | |
| Function | Name | Dim | Range | Fmin |
|---|---|---|---|---|
| Simple multimodal functions | ||||
| F24 | Shifted and Rotated Rosenbrock’s Function | 10 | [−100, 100] | 400 |
| F25 | Shifted and Rotated Rastrigin’s Function | 10 | [−100, 100] | 500 |
| F26 | Shifted and Rotated Expanded Scaffer’s F6 Function | 10 | [−100, 100] | 600 |
| F27 | Shifted and Rotated Non-Continuous Rastrigin’s Function | 10 | [−100, 100] | 800 |
| Hybrid functions | ||||
| F28 | Hybrid Function 1 (N = 3) | 10 | [−100, 100] | 1100 |
| F29 | Hybrid Function 3 (N = 3) | 10 | [−100, 100] | 1300 |
| F30 | Hybrid Function 4 (N = 4) | 10 | [−100, 100] | 1400 |
| F31 | Hybrid Function 5 (N = 4) | 10 | [−100, 100] | 1500 |
| F32 | Hybrid Function 6 (N = 5) | 10 | [−100, 100] | 1700 |
| F33 | Hybrid Function 6 (N = 6) | 10 | [−100, 100] | 2000 |
| Composite Functions | ||||
| F34 | Composition Function 2 (N = 3) | 10 | [−100, 100] | 2200 |
| F35 | Composition Function 3 (N = 4) | 10 | [−100, 100] | 2300 |
| F36 | Composition Function 4 (N = 4) | 10 | [−100, 100] | 2400 |
| F37 | Composition Function 5 (N = 5) | 10 | [−100, 100] | 2500 |
| F38 | Composition Function 6 (N = 5) | 10 | [−100, 100] | 2600 |
| F39 | Composition Function 7 (N = 6) | 10 | [−100, 100] | 2700 |
| F40 | Composition Function 9 (N = 3) | 10 | [−100, 100] | 2900 |
| Fn | Metric | WOA | HHO | SSA | MVO | STOA | TSA | AO | IHSSAO |
|---|---|---|---|---|---|---|---|---|---|
| F24 | Mean | 4.50 × 102 | 4.37 × 102 | 4.19 × 102 | 4.22 × 102 | 4.44 × 102 | 5.37 × 102 | 4.29 × 102 | 4.18 × 102 |
| Std | 5.10 × 101 | 3.92 × 101 | 2.55 × 101 | 1.73 × 101 | 2.86 × 101 | 1.49 × 102 | 3.49 × 101 | 2.44 × 101 | |
| F25 | Mean | 5.54 × 102 | 5.60 × 102 | 5.37 × 102 | 5.22 × 102 | 5.31 × 102 | 5.60 × 102 | 5.35 × 102 | 5.29 × 102 |
| Std | 2.04 × 101 | 1.52 × 101 | 1.42 × 101 | 1.41 × 101 | 1.08 × 101 | 2.15 × 101 | 1.34 × 101 | 1.12 × 101 | |
| F26 | Mean | 6.43 × 102 | 6.42 × 102 | 6.21 × 102 | 6.12 × 102 | 6.15 × 102 | 6.37 × 102 | 6.20 × 102 | 6.19 × 102 |
| Std | 1.16 × 101 | 8.50 × 100 | 1.42 × 101 | 4.67 × 100 | 6.75 × 100 | 1.51 × 101 | 7.58 × 100 | 6.38 × 100 | |
| F27 | Mean | 8.40 × 102 | 8.33 × 102 | 8.32 × 102 | 8.26 × 102 | 8.31 × 102 | 8.53 × 102 | 8.30 × 102 | 8.25 × 102 |
| Std | 1.34 × 101 | 1.14 × 101 | 1.46 × 101 | 9.95 × 100 | 9.50 × 100 | 1.97 × 101 | 9.01 × 100 | 6.95 × 100 | |
| F28 | Mean | 1.24 × 103 | 1.21 × 103 | 1.29 × 103 | 1.16 × 103 | 1.27 × 103 | 3.95 × 103 | 1.25 × 103 | 1.19 × 103 |
| Std | 9.53 × 101 | 6.19 × 101 | 1.66 × 102 | 3.52 × 101 | 9.64 × 101 | 2.75 × 103 | 1.91 × 102 | 8.29 × 101 | |
| F29 | Mean | 1.62 × 104 | 2.08 × 104 | 3.63 × 104 | 1.67 × 104 | 2.37 × 104 | 1.71 × 106 | 2.00 × 104 | 1.49 × 104 |
| Std | 1.24 × 104 | 1.50 × 104 | 4.62 × 104 | 1.48 × 104 | 1.56 × 104 | 5.19 × 106 | 1.43 × 104 | 1.07 × 104 | |
| F30 | Mean | 2.89 × 103 | 1.84 × 103 | 5.10 × 103 | 3.41 × 103 | 5.19 × 103 | 4.23 × 103 | 2.81 × 103 | 2.30 × 103 |
| Std | 1.51 × 103 | 5.71 × 102 | 8.37 × 103 | 2.90 × 103 | 4.29 × 103 | 1.99 × 103 | 2.18 × 103 | 1.18 × 103 | |
| F31 | Mean | 1.03 × 104 | 7.22 × 103 | 1.32 × 104 | 2.52 × 103 | 6.17 × 103 | 1.14 × 104 | 7.66 × 103 | 5.87 × 103 |
| Std | 8.92 × 103 | 3.30 × 103 | 1.57 × 104 | 1.89 × 103 | 4.23 × 103 | 9.14 × 103 | 4.54 × 103 | 2.68 × 103 | |
| F32 | Mean | 1.81 × 103 | 1.80 × 103 | 1.82 × 103 | 1.79 × 103 | 1.78 × 103 | 1.85 × 103 | 1.78 × 103 | 1.75 × 103 |
| Std | 6.61 × 101 | 9.01 × 101 | 7.58 × 101 | 5.61 × 101 | 3.93 × 101 | 1.01 × 102 | 3.05 × 101 | 2.47 × 101 | |
| F33 | Mean | 2.22 × 103 | 2.17 × 103 | 2.15 × 103 | 2.13 × 103 | 2.15 × 103 | 2.20 × 103 | 2.14 × 103 | 2.12 × 103 |
| Std | 7.67 × 101 | 6.23 × 101 | 7.84 × 101 | 6.98 × 101 | 7.15 × 101 | 6.13 × 101 | 5.96 × 101 | 4.28 × 101 | |
| F34 | Mean | 2.40 × 103 | 2.39 × 103 | 2.44 × 103 | 2.35 × 103 | 2.90 × 103 | 2.64 × 103 | 2.31 × 103 | 2.28 × 103 |
| Std | 2.91 × 102 | 3.26 × 102 | 3.61 × 102 | 1.96 × 102 | 6.75 × 102 | 3.79 × 102 | 1.46 × 101 | 1.03 × 101 | |
| F35 | Mean | 2.67 × 103 | 2.68 × 103 | 2.65 × 103 | 2.66 × 103 | 2.64 × 103 | 2.71 × 103 | 2.65 × 103 | 2.63 × 103 |
| Std | 3.08 × 101 | 2.49 × 101 | 1.36 × 101 | 3.40 × 101 | 1.55 × 101 | 4.05 × 101 | 2.17 × 101 | 1.10 × 101 | |
| F36 | Mean | 2.77 × 103 | 2.78 × 103 | 2.79 × 103 | 2.75 × 103 | 2.76 × 103 | 2.82 × 103 | 2.75 × 103 | 2.74 × 103 |
| Std | 5.46 × 101 | 1.37 × 102 | 6.99 × 101 | 6.44 × 101 | 1.03 × 101 | 4.71 × 101 | 7.79 × 101 | 9.31 × 101 | |
| F37 | Mean | 2.96 × 103 | 2.94 × 103 | 2.94 × 103 | 2.93 × 103 | 2.95 × 103 | 3.08 × 103 | 2.93 × 103 | 2.93 × 103 |
| Std | 2.26 × 101 | 1.97 × 101 | 3.33 × 101 | 3.39 × 101 | 1.78 × 101 | 1.46 × 102 | 2.37 × 101 | 2.85 × 101 | |
| F38 | Mean | 3.59 × 103 | 3.70 × 103 | 3.06 × 103 | 3.17 × 103 | 3.40 × 103 | 3.81 × 103 | 3.07 × 103 | 3.02 × 103 |
| Std | 5.53 × 102 | 6.43 × 102 | 3.87 × 102 | 4.41 × 102 | 4.74 × 102 | 5.67 × 102 | 2.31 × 102 | 2.24 × 102 | |
| F39 | Mean | 3.15 × 103 | 3.20 × 103 | 3.14 × 103 | 3.12 × 103 | 3.10 × 103 | 3.19 × 103 | 3.11 × 103 | 3.10 × 103 |
| Std | 4.24 × 101 | 5.91 × 101 | 6.34 × 101 | 3.09 × 101 | 2.59 × 100 | 4.75 × 101 | 5.94 × 100 | 1.26 × 101 | |
| F40 | Mean | 3.42 × 103 | 3.38 × 103 | 3.29 × 103 | 3.26 × 103 | 3.25 × 103 | 3.34 × 103 | 3.28 × 103 | 3.24 × 103 |
| Std | 1.23 × 102 | 9.08 × 101 | 8.14 × 101 | 7.89 × 101 | 8.40 × 101 | 1.18 × 102 | 6.74 × 101 | 4.18 × 101 |
| Fn | WOA | HHO | SSA | MVO | STOA | TSA | AO | IHSSAO |
|---|---|---|---|---|---|---|---|---|
| F24 | 7 | 5 | 2 | 3 | 6 | 8 | 4 | 1 |
| F25 | 6 | 7 | 5 | 1 | 3 | 8 | 4 | 2 |
| F26 | 8 | 7 | 5 | 1 | 2 | 6 | 4 | 3 |
| F27 | 7 | 6 | 5 | 2 | 4 | 8 | 3 | 1 |
| F28 | 4 | 3 | 7 | 1 | 6 | 8 | 5 | 2 |
| F29 | 2 | 6 | 8 | 3 | 7 | 4 | 5 | 1 |
| F30 | 4 | 1 | 7 | 5 | 8 | 6 | 3 | 2 |
| F31 | 6 | 4 | 8 | 1 | 3 | 7 | 5 | 2 |
| F32 | 6 | 5 | 7 | 4 | 3 | 8 | 2 | 1 |
| F33 | 8 | 6 | 5 | 2 | 4 | 7 | 3 | 1 |
| F34 | 5 | 4 | 6 | 3 | 8 | 7 | 2 | 1 |
| F35 | 6 | 7 | 3 | 5 | 2 | 7 | 4 | 1 |
| F36 | 5 | 6 | 7 | 2 | 4 | 8 | 3 | 1 |
| F37 | 7 | 4 | 5 | 2 | 6 | 8 | 3 | 1 |
| F38 | 6 | 7 | 2 | 4 | 5 | 8 | 3 | 1 |
| F39 | 6 | 8 | 5 | 4 | 1 | 7 | 3 | 2 |
| F40 | 8 | 7 | 5 | 3 | 2 | 6 | 4 | 1 |
| Threat Sequence | Center Coordinates (km) | Radius (km) |
|---|---|---|
| 1 | (60, 160) | 20 |
| 2 | (80, 100) | 20 |
| 3 | (100, 40) | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, J.; Sha, Y.; Chen, Y.; Zhang, G.; Hu, X.; Bai, G.; Liu, J. IHSSAO: An Improved Hybrid Salp Swarm Algorithm and Aquila Optimizer for UAV Path Planning in Complex Terrain. Appl. Sci. 2022, 12, 5634. https://doi.org/10.3390/app12115634
Yao J, Sha Y, Chen Y, Zhang G, Hu X, Bai G, Liu J. IHSSAO: An Improved Hybrid Salp Swarm Algorithm and Aquila Optimizer for UAV Path Planning in Complex Terrain. Applied Sciences. 2022; 12(11):5634. https://doi.org/10.3390/app12115634
Chicago/Turabian StyleYao, Jinyan, Yongbai Sha, Yanli Chen, Guoqing Zhang, Xinyu Hu, Guiqiang Bai, and Jun Liu. 2022. "IHSSAO: An Improved Hybrid Salp Swarm Algorithm and Aquila Optimizer for UAV Path Planning in Complex Terrain" Applied Sciences 12, no. 11: 5634. https://doi.org/10.3390/app12115634
APA StyleYao, J., Sha, Y., Chen, Y., Zhang, G., Hu, X., Bai, G., & Liu, J. (2022). IHSSAO: An Improved Hybrid Salp Swarm Algorithm and Aquila Optimizer for UAV Path Planning in Complex Terrain. Applied Sciences, 12(11), 5634. https://doi.org/10.3390/app12115634