
Allowable Pitch Angle of Aerodynamic Imbalance Due to Individual Pitch Movement for Ultimate Loads on Offshore Wind Turbine Using Artificial Neural Network

Abstract
:1. Introduction
2. Integrated Loads Analysis
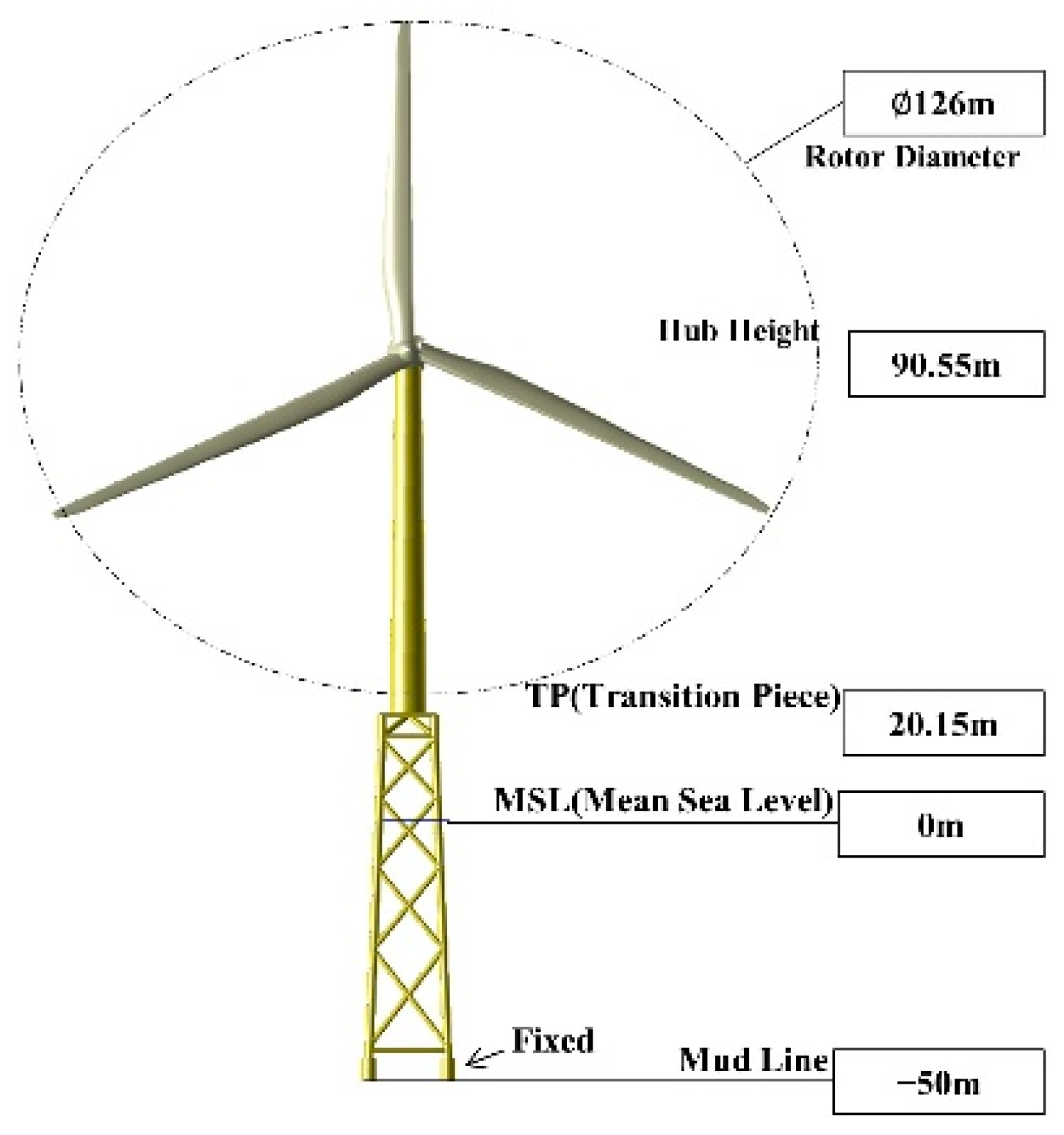
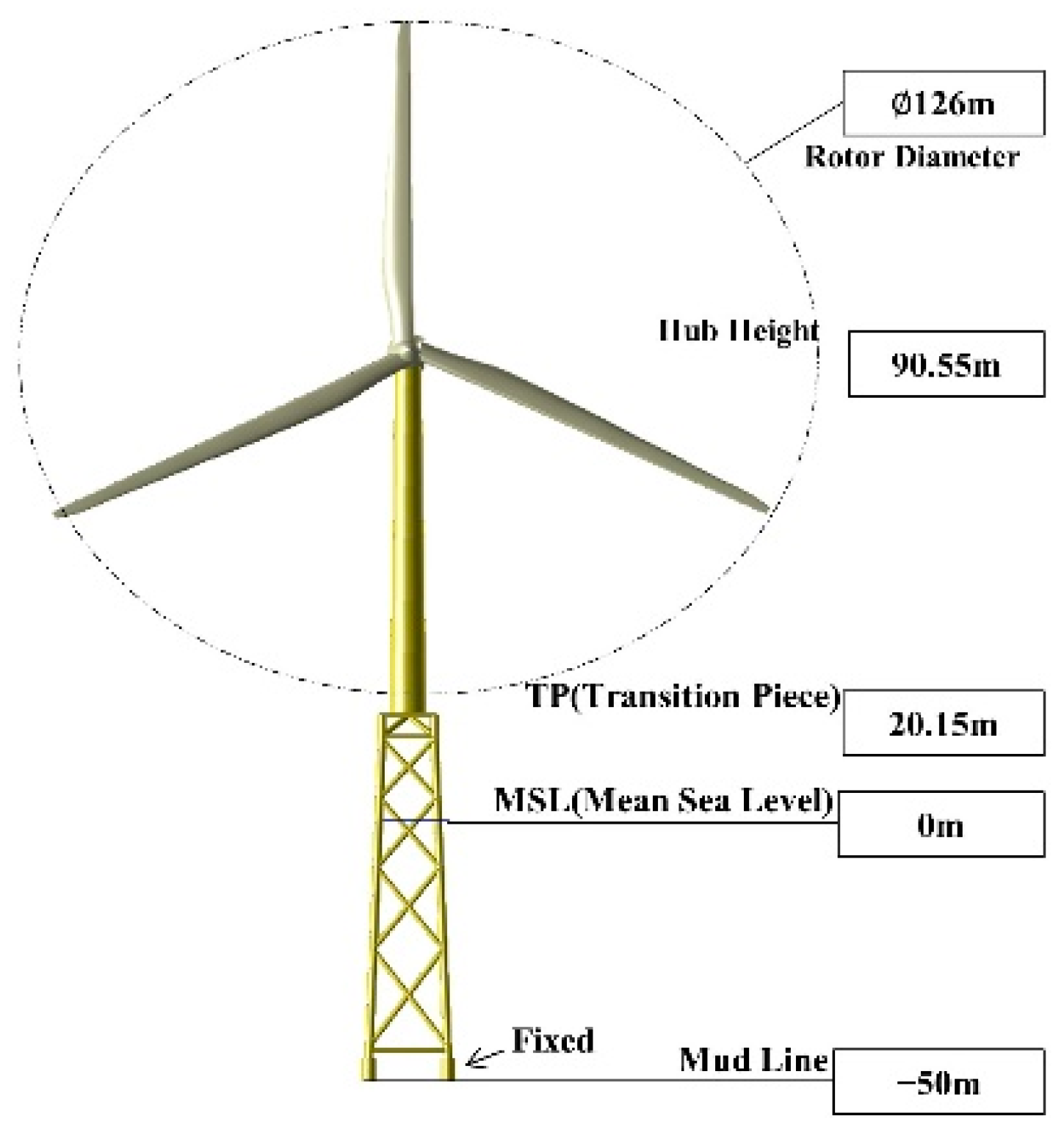
2.1. Offshore Wind Turbine Model
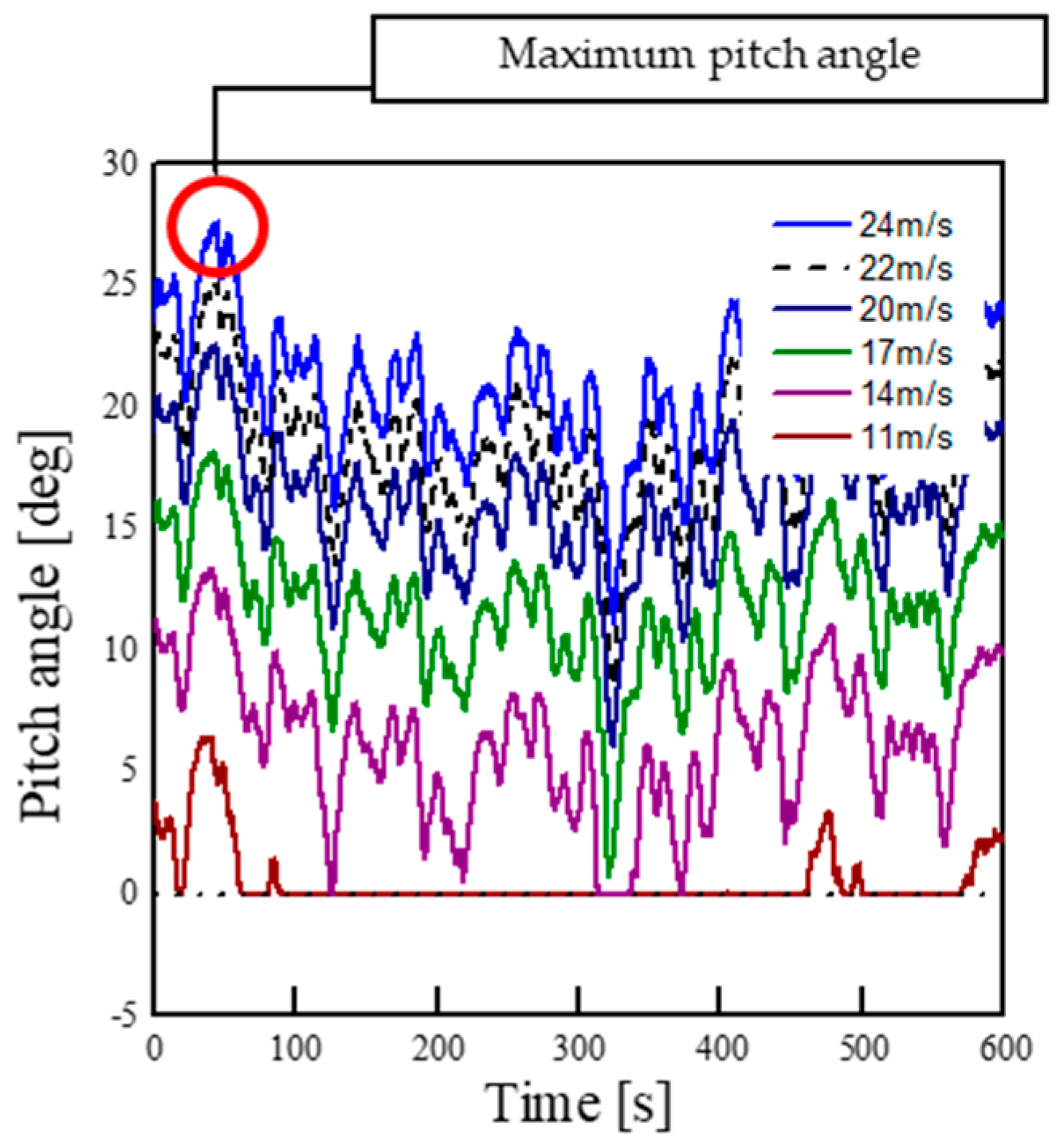
2.2. Ultimate Load Analysis Condition
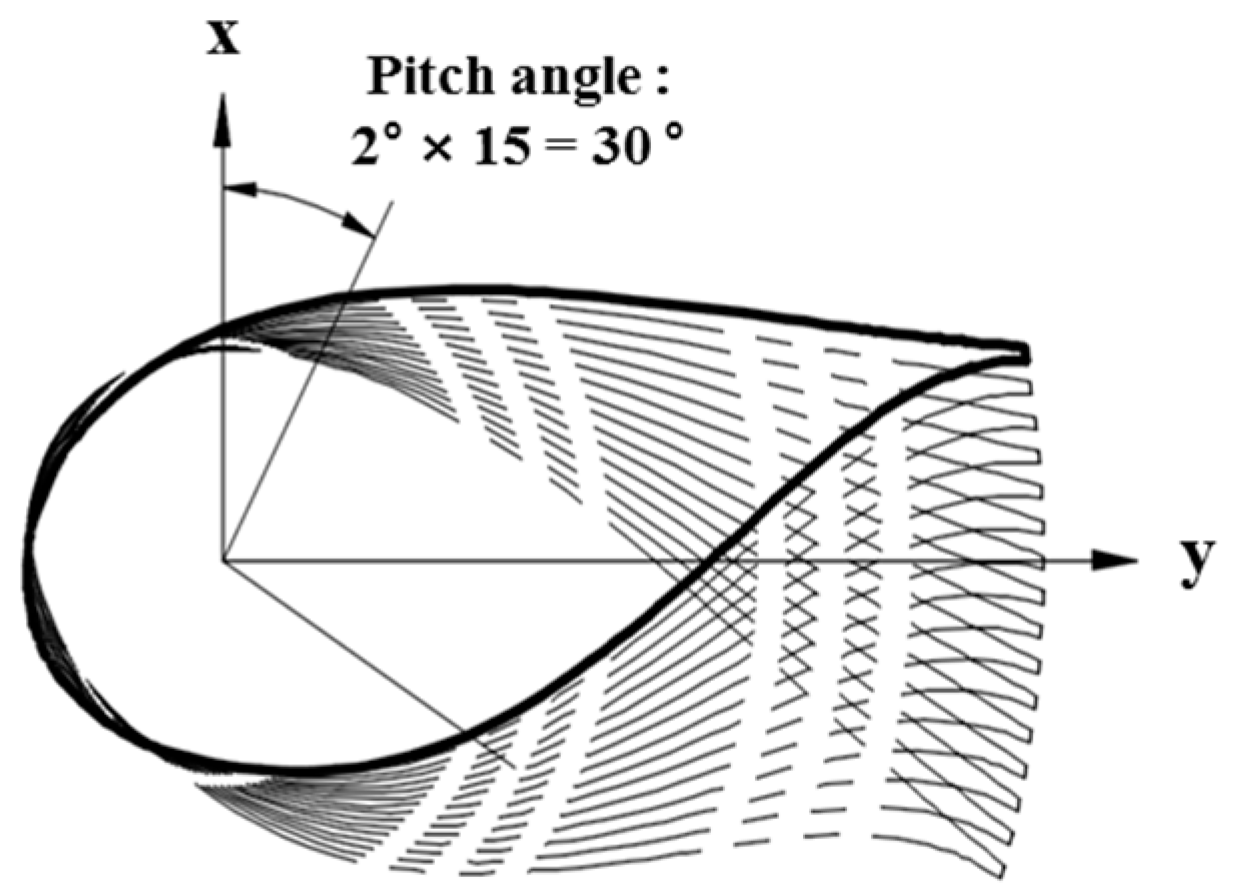
2.3. Aerodynamic Imbalance Condition
3. Results and Discussion
3.1. Ultimate Load Analysis for CPC
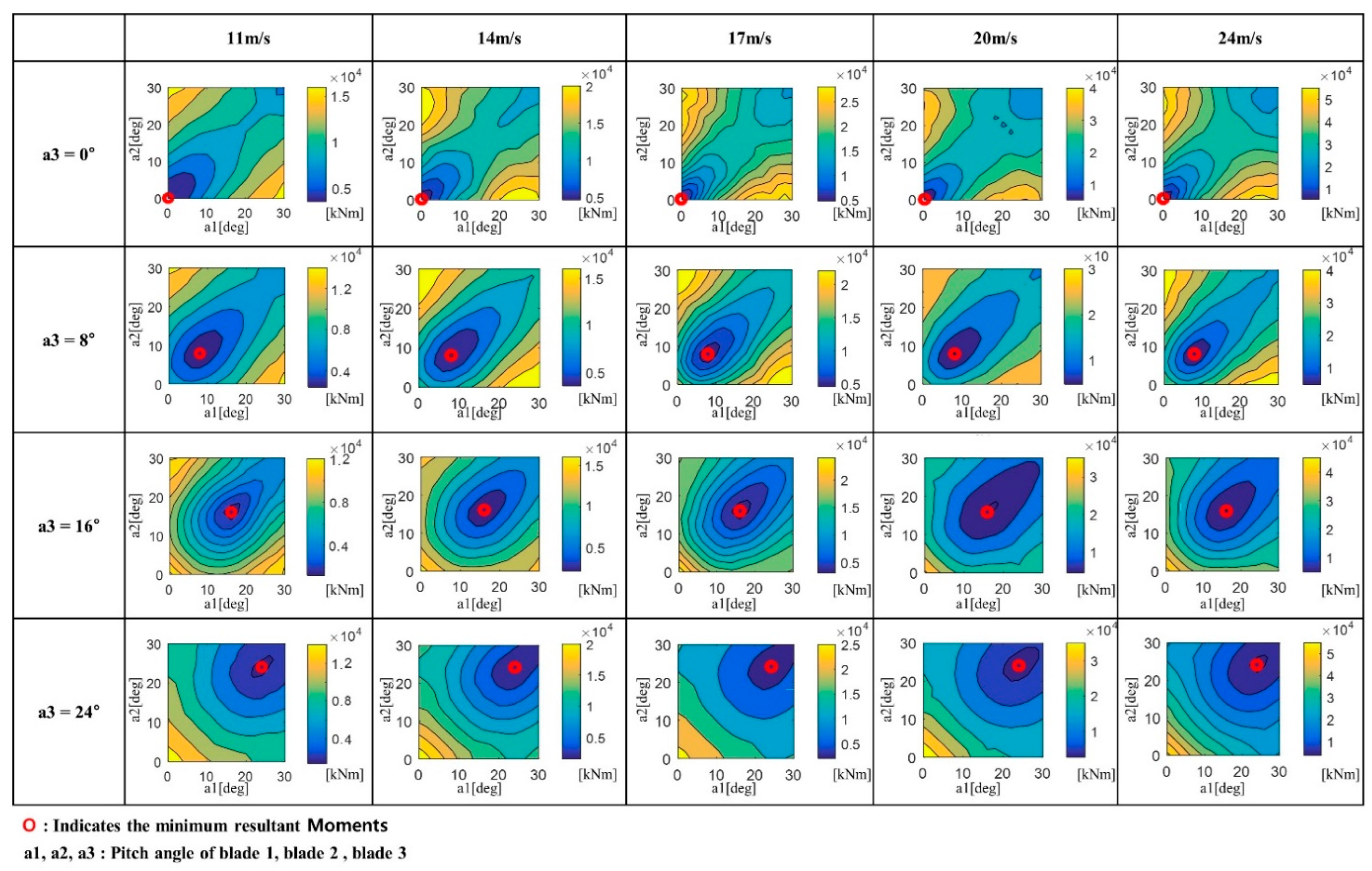
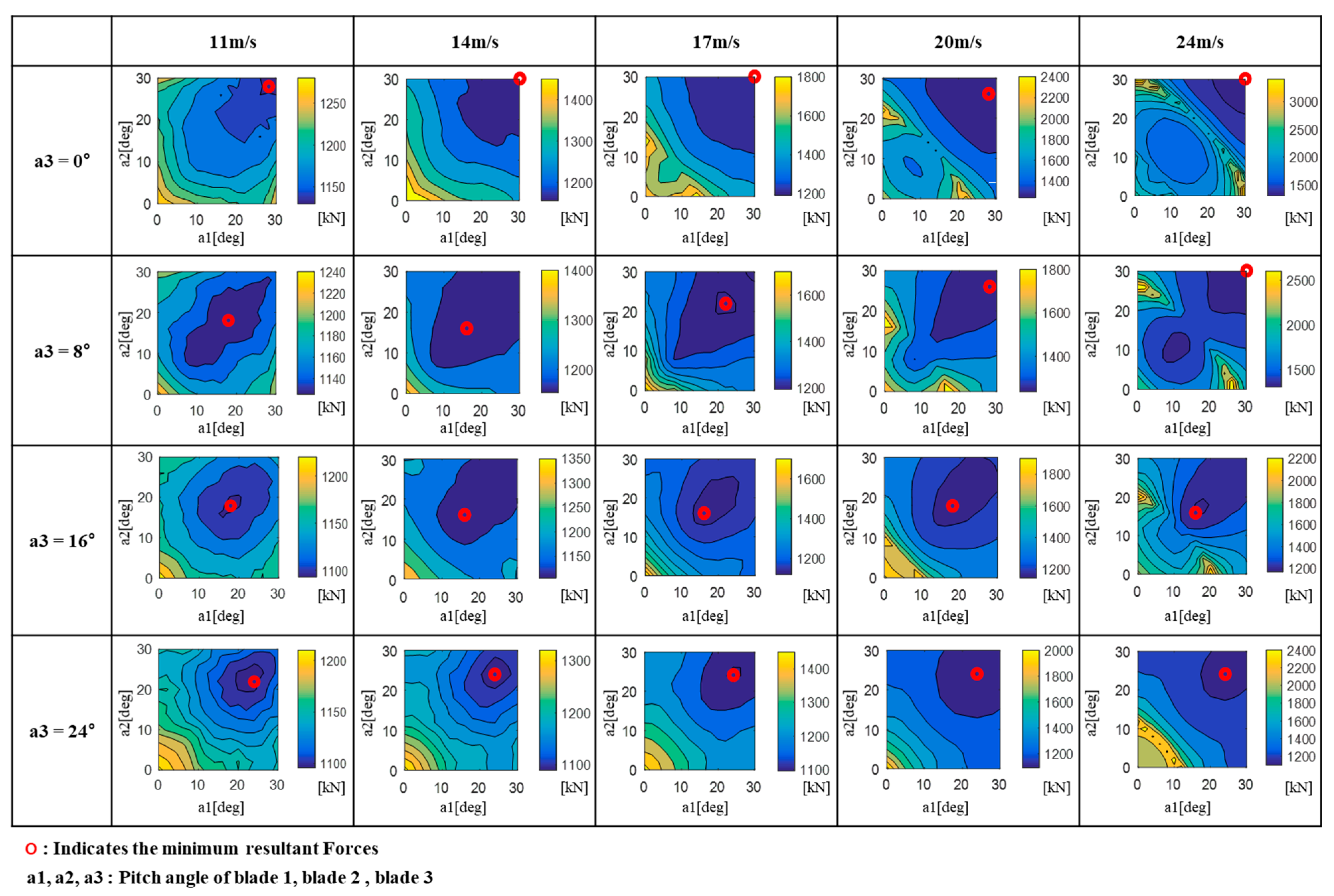
3.2. Ultimate Load Analysis under Aerodynamic Imbalance
3.3. Allowable Pitch Angle (APA) Region
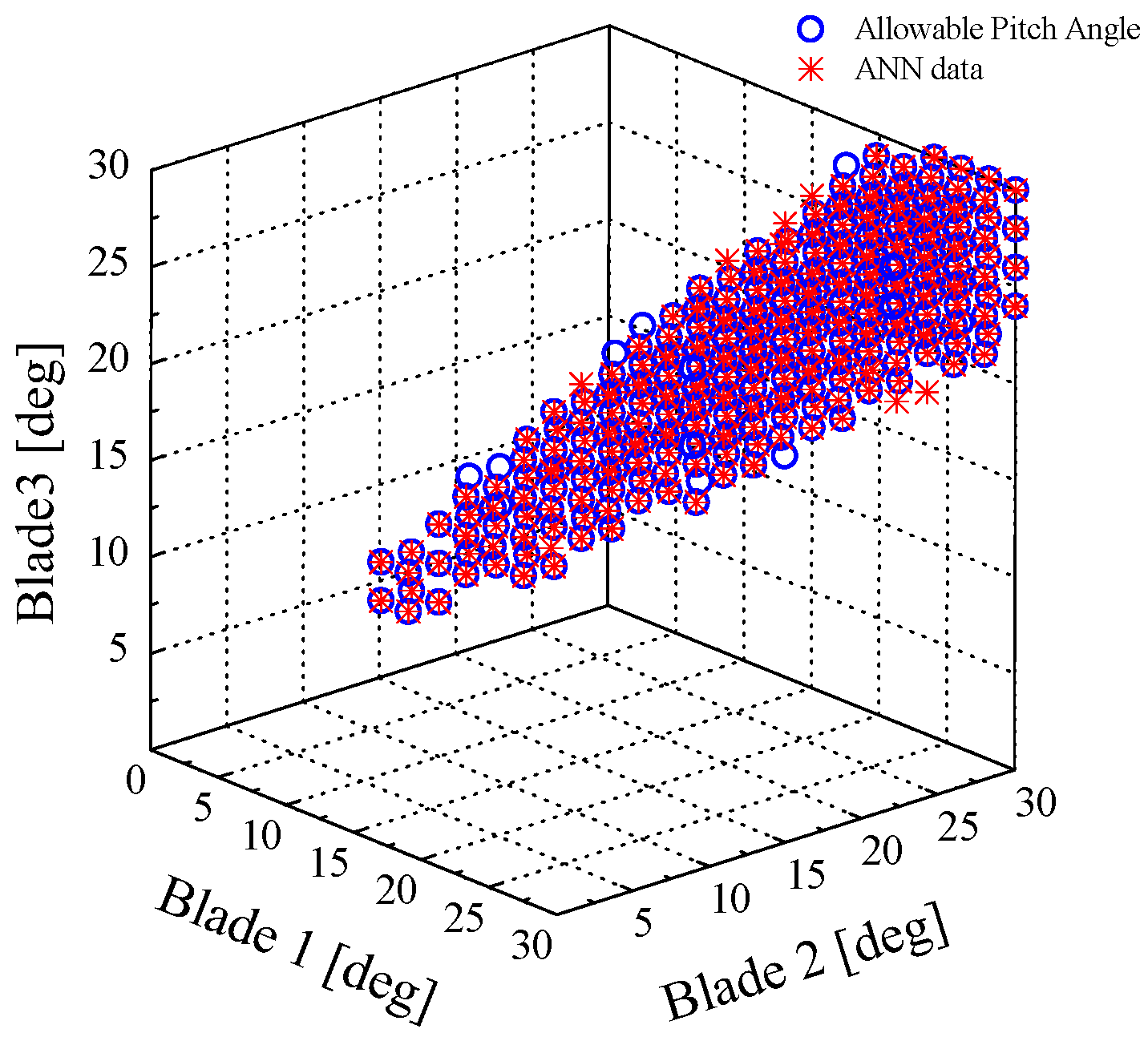
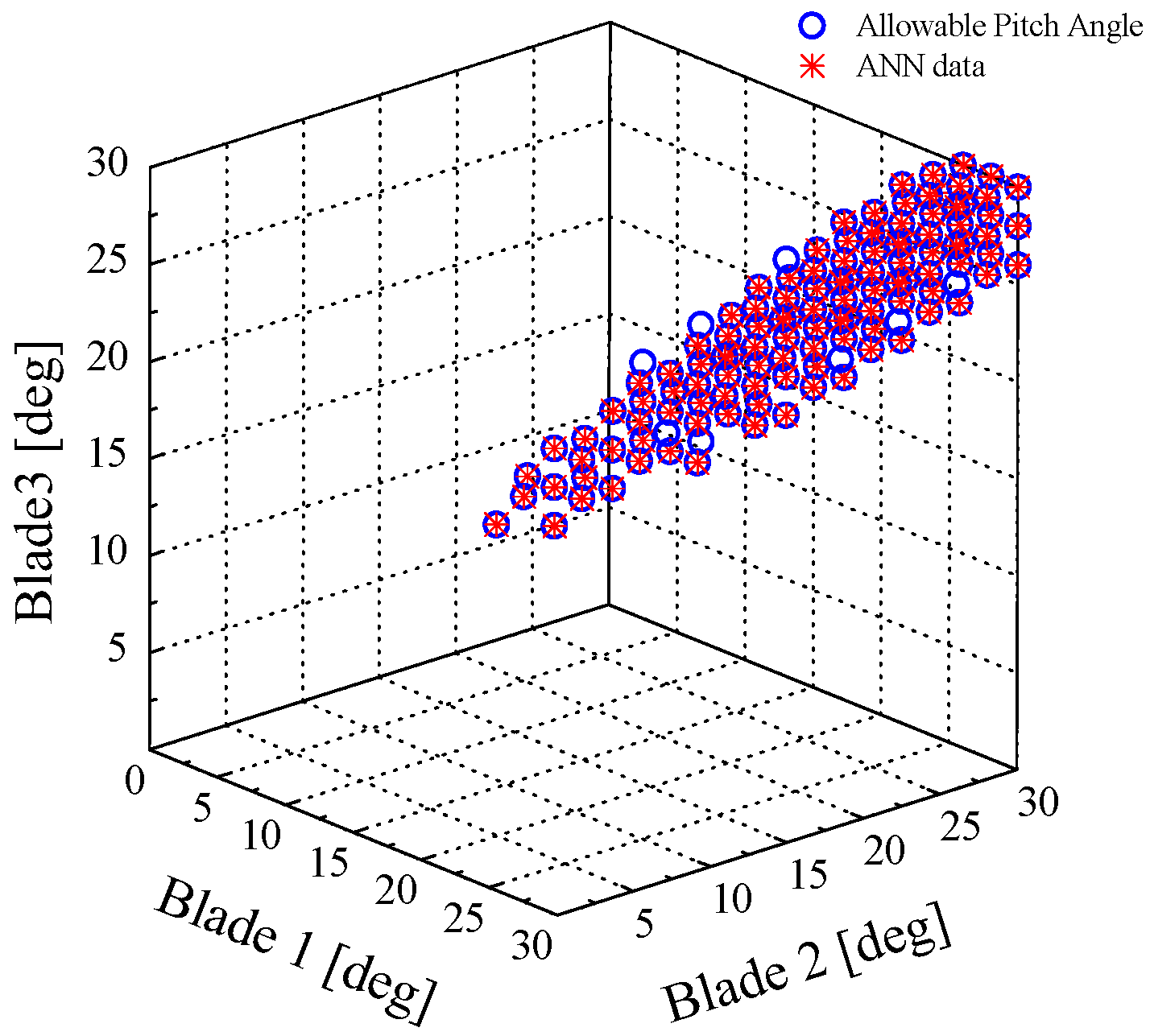
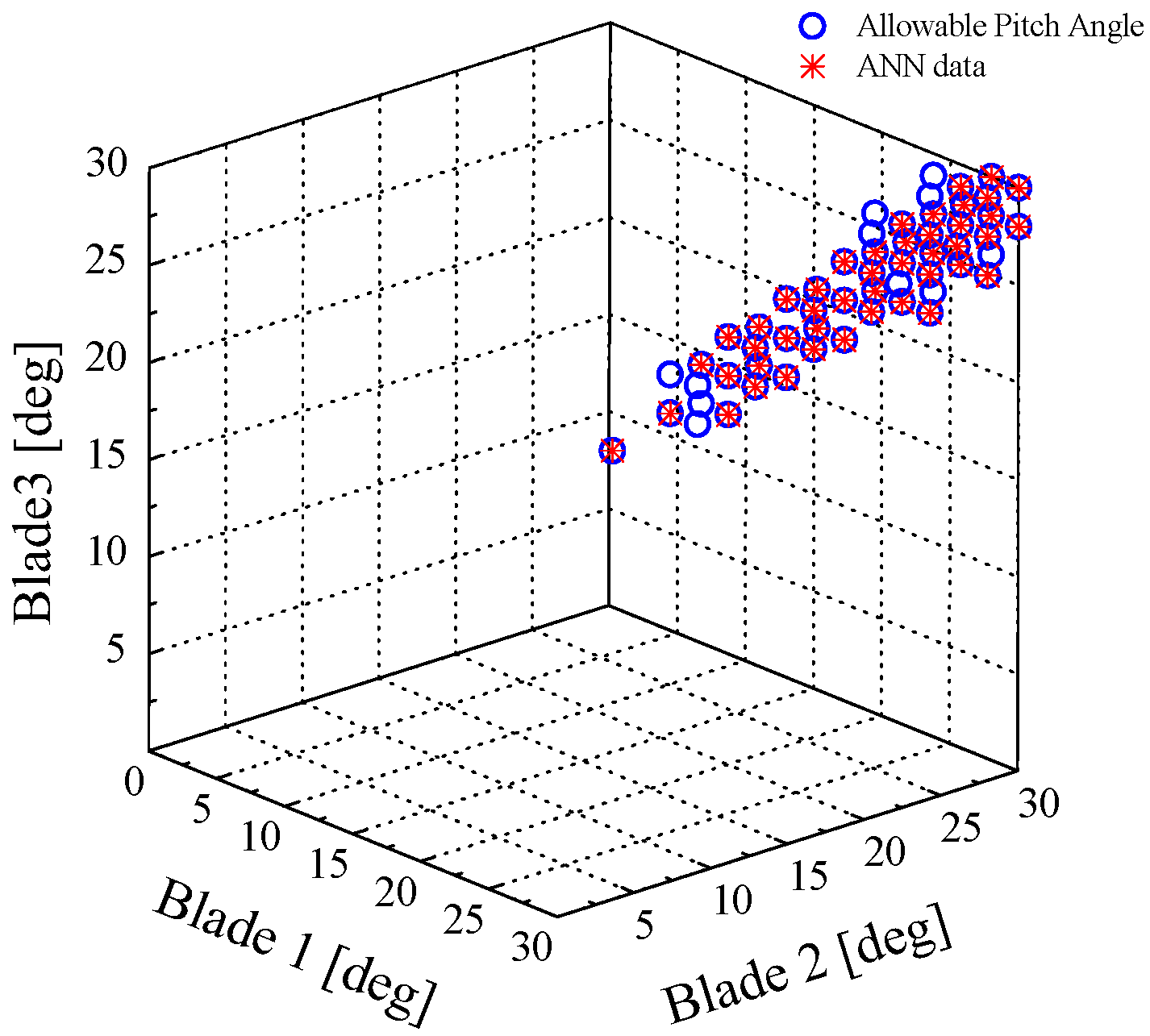
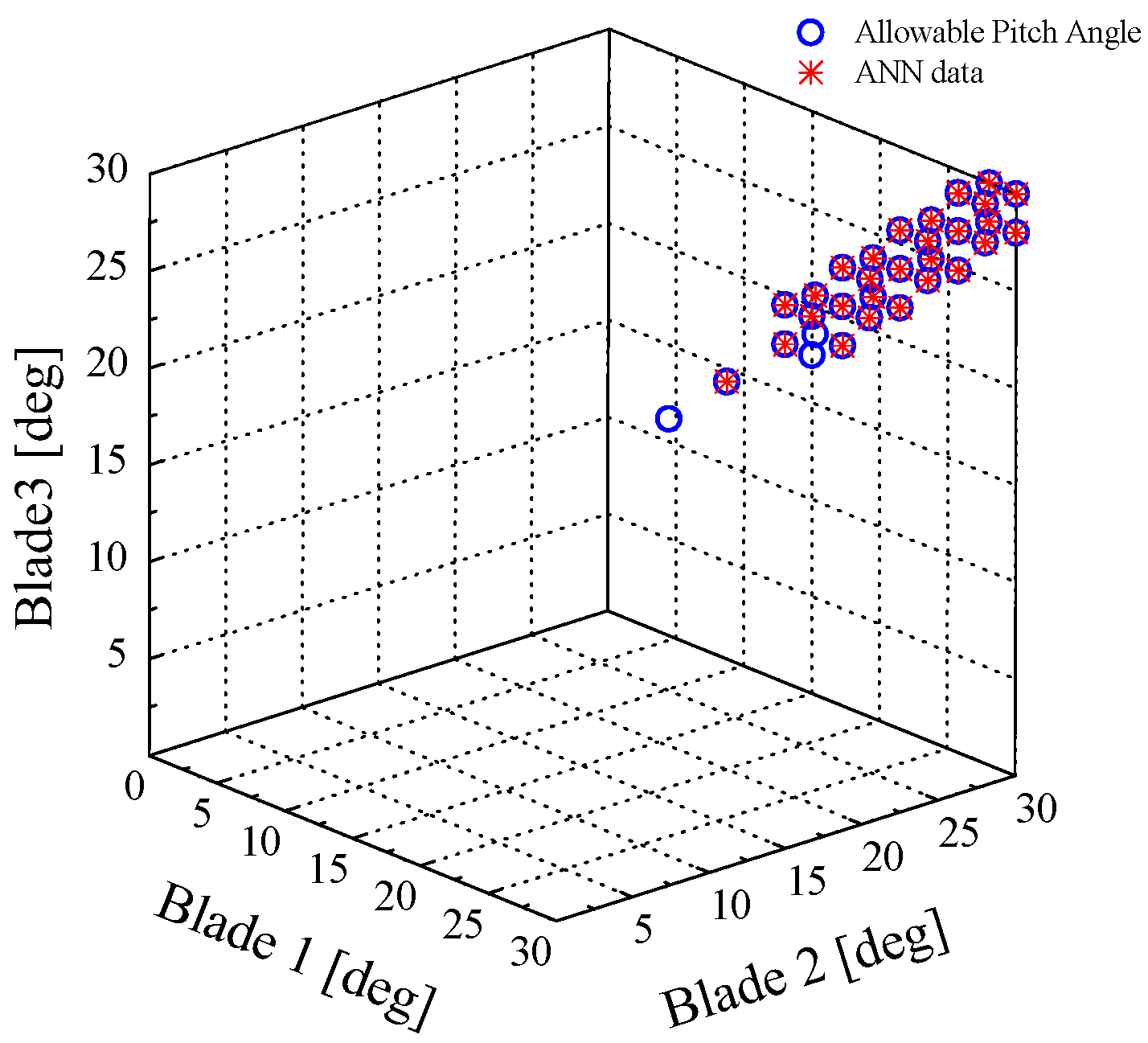
3.4. Pattern Analysis for APA Using Machine Learning
4. Conclusions
- (1)
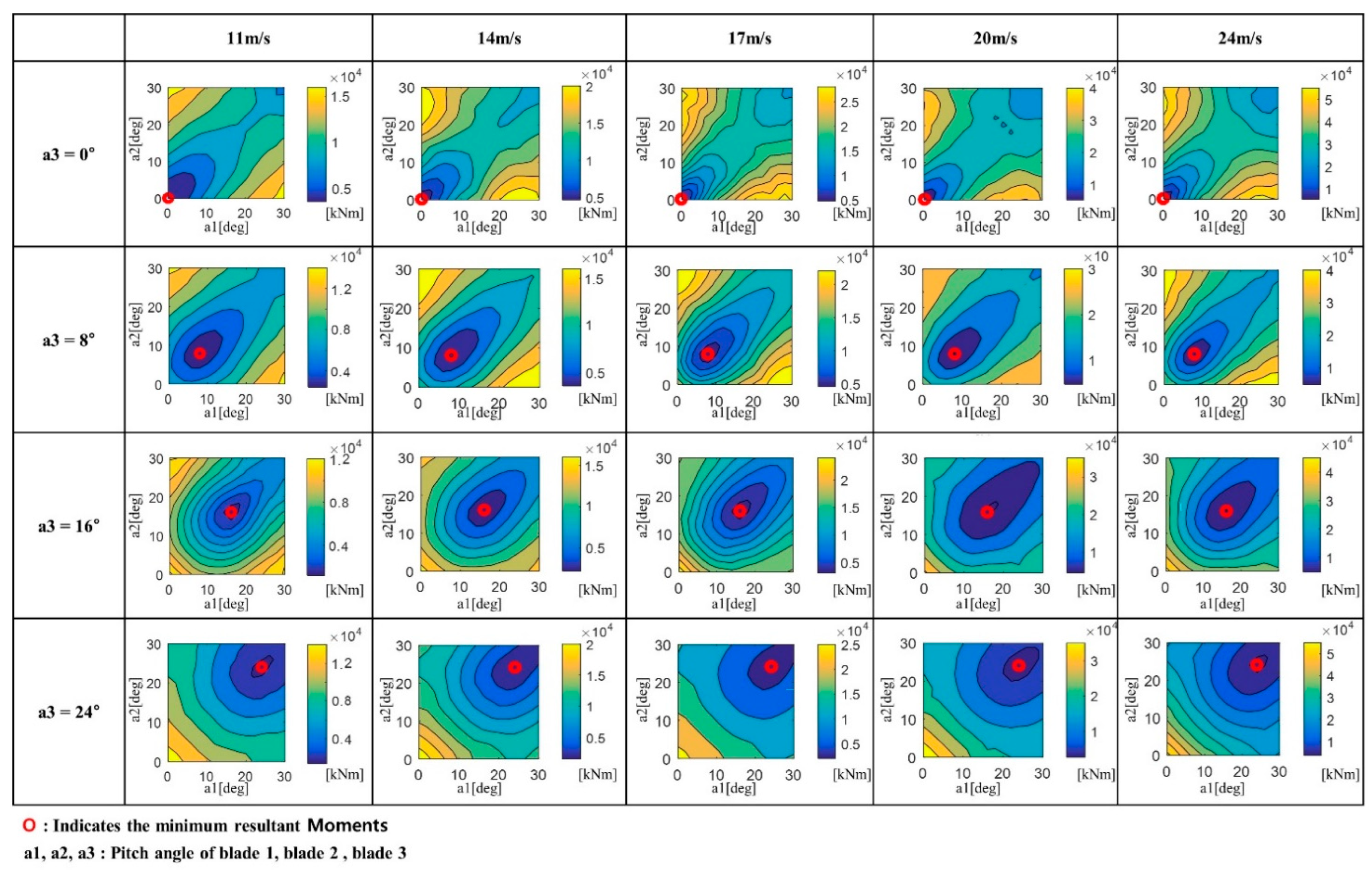
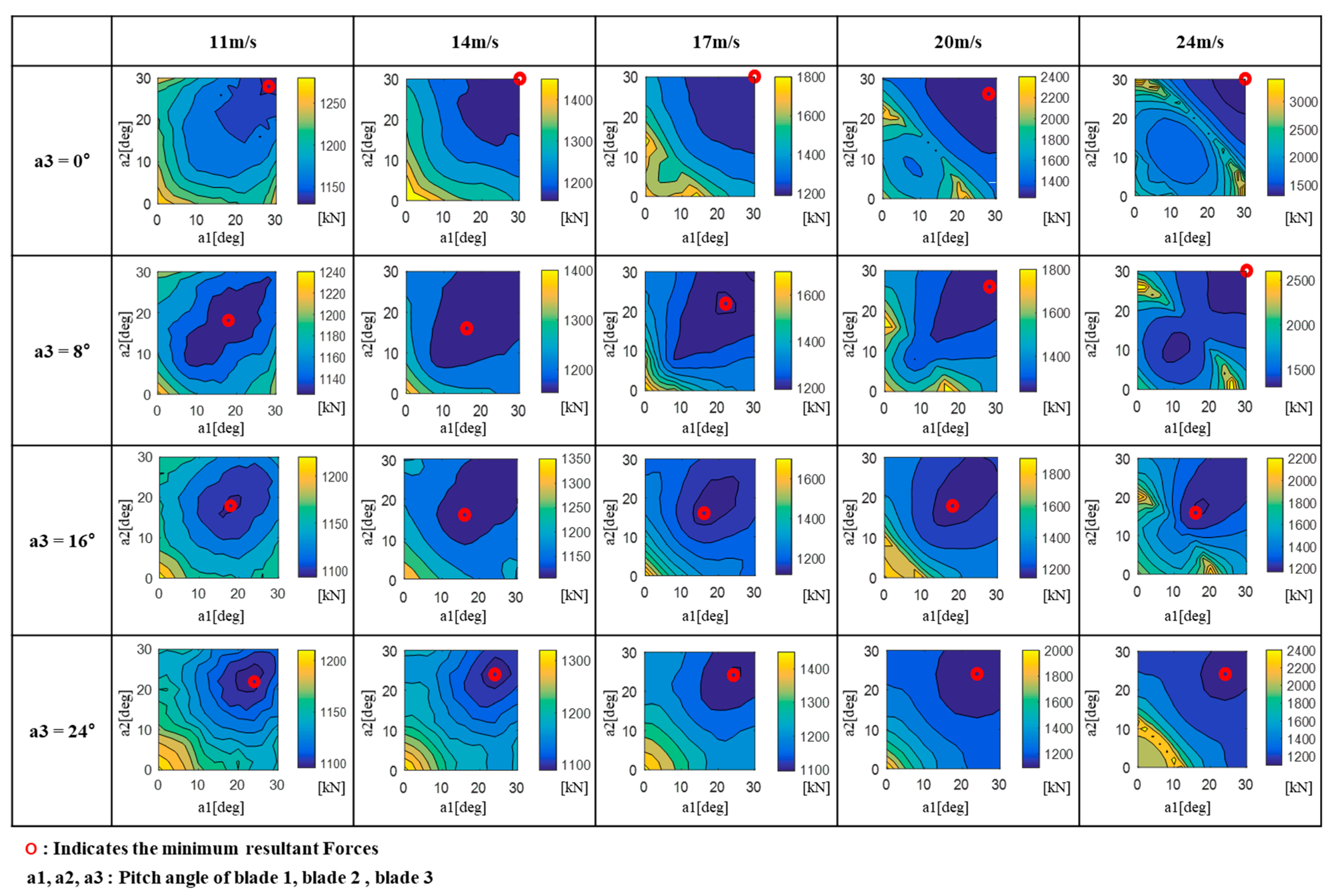
- The results of the ultimate load analysis under aerodynamic imbalance indicate that the difference in the resultant moment tends to increase largely as the relative difference of pitch angle between the blades increases. On the other hand, the resultant force is insignificant compared to the resultant moment.
- (2)
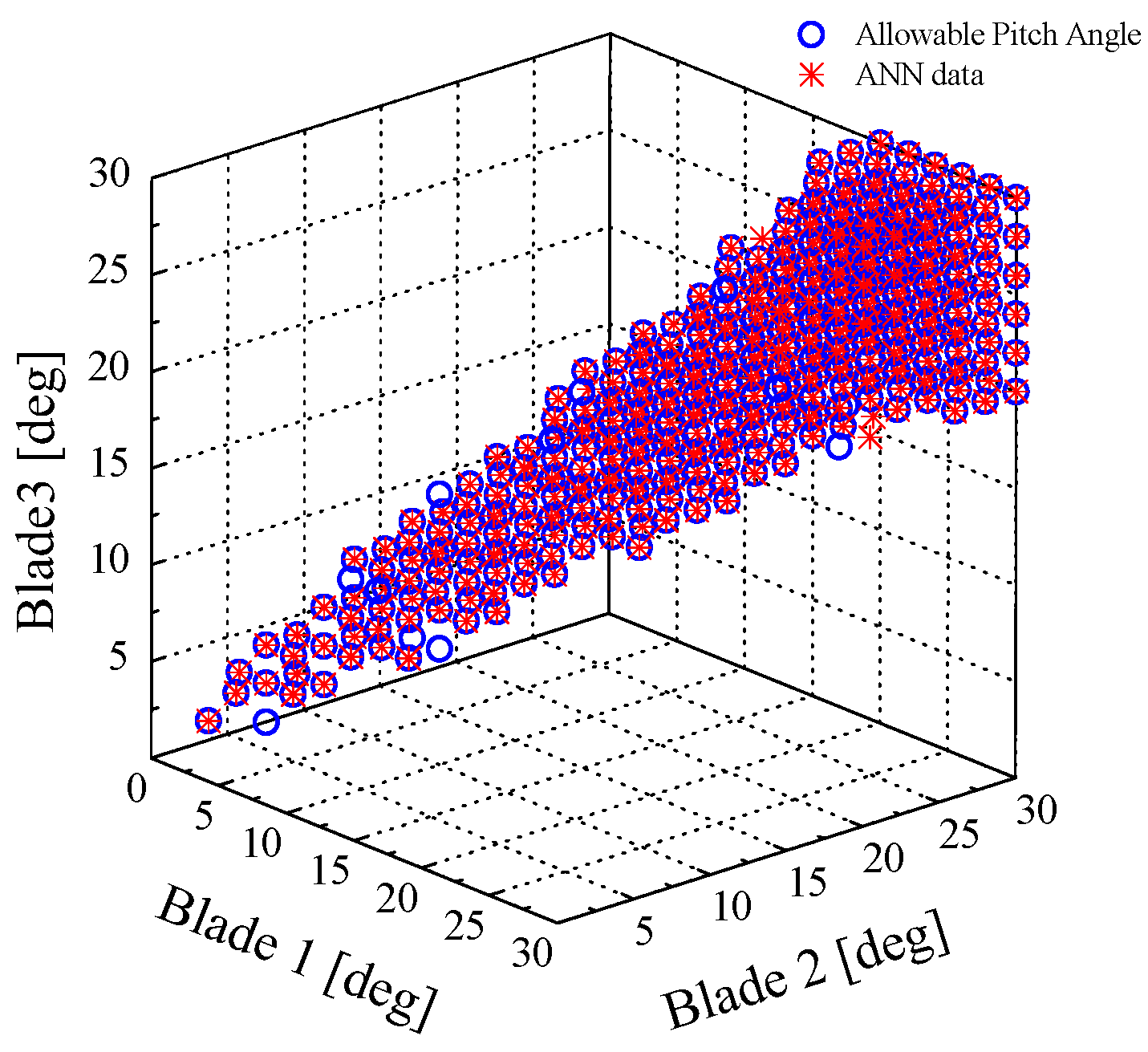
- We proposed a procedure to determine the APA region for each wind speed, and also determined that the proposed APA region expands like a cone as the pitch angle increases. This seems to occur when reducing the load of the wind turbine due to the aerodynamic stall with the increase in the APA. In addition, we identified that the relative difference in the pitch angle between the blades was only possible in a small area. This approach may be used to reduce the blade loads due to the relative pitch angle deviation under aerodynamic imbalance.
- (3)
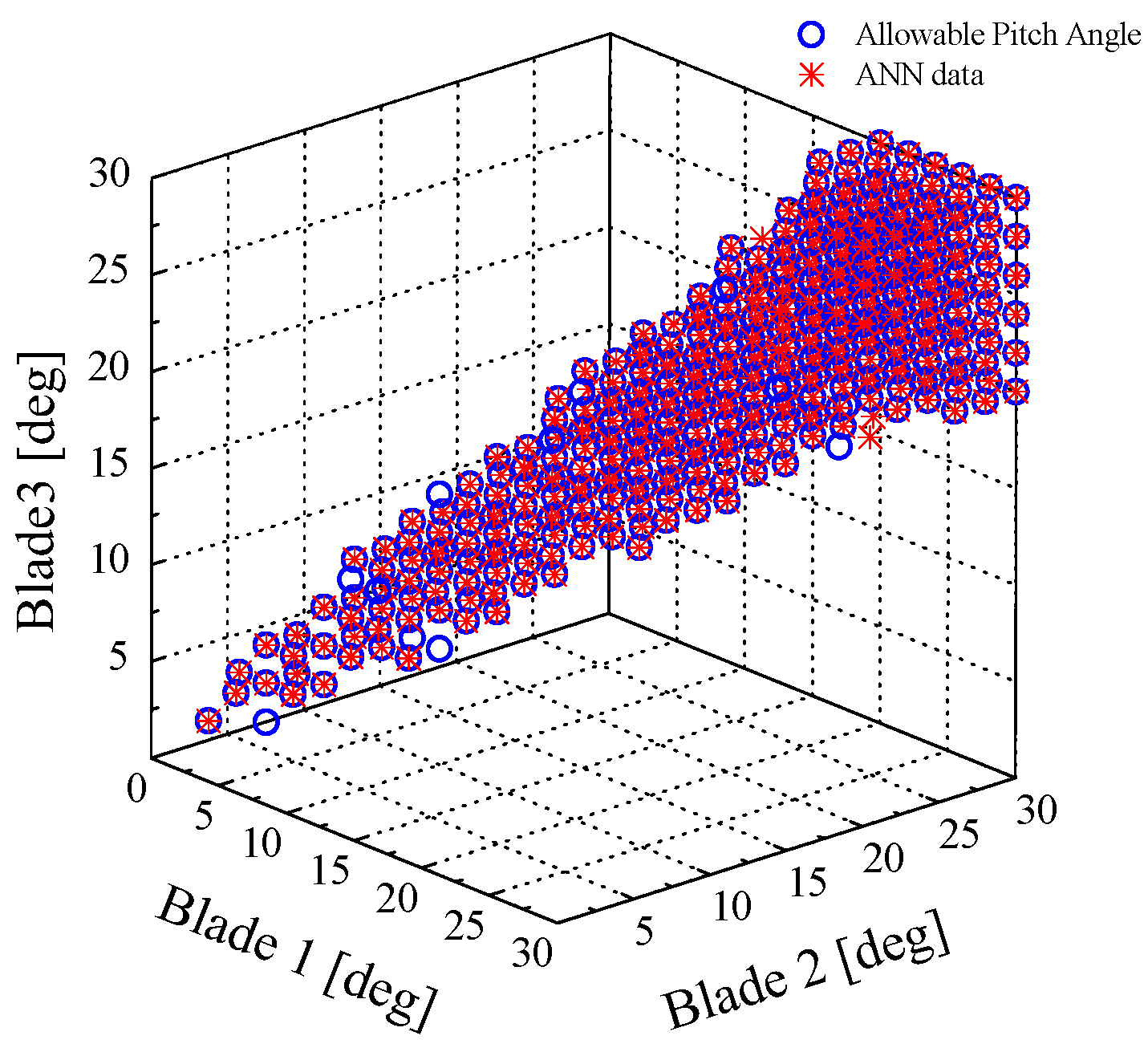
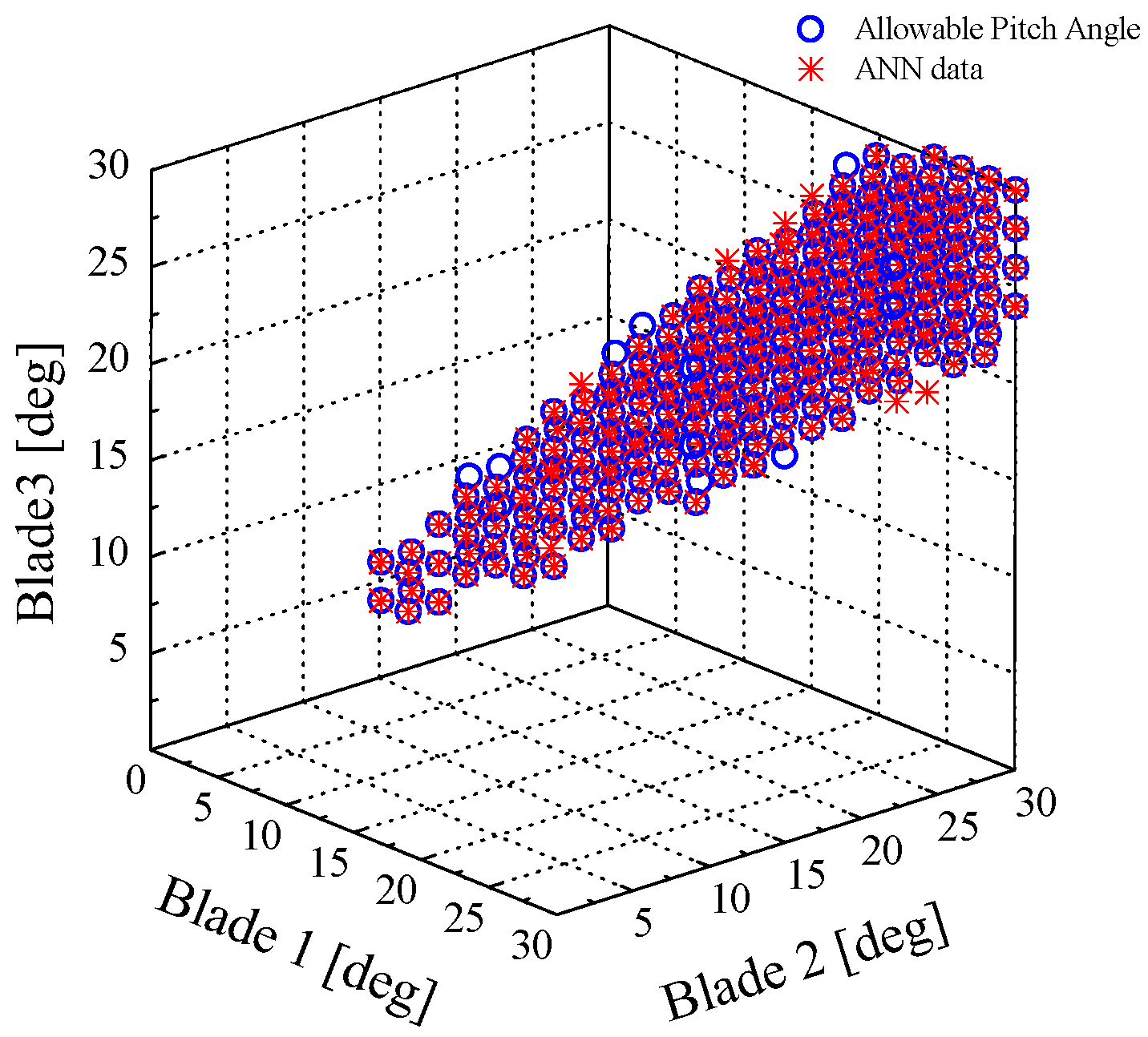
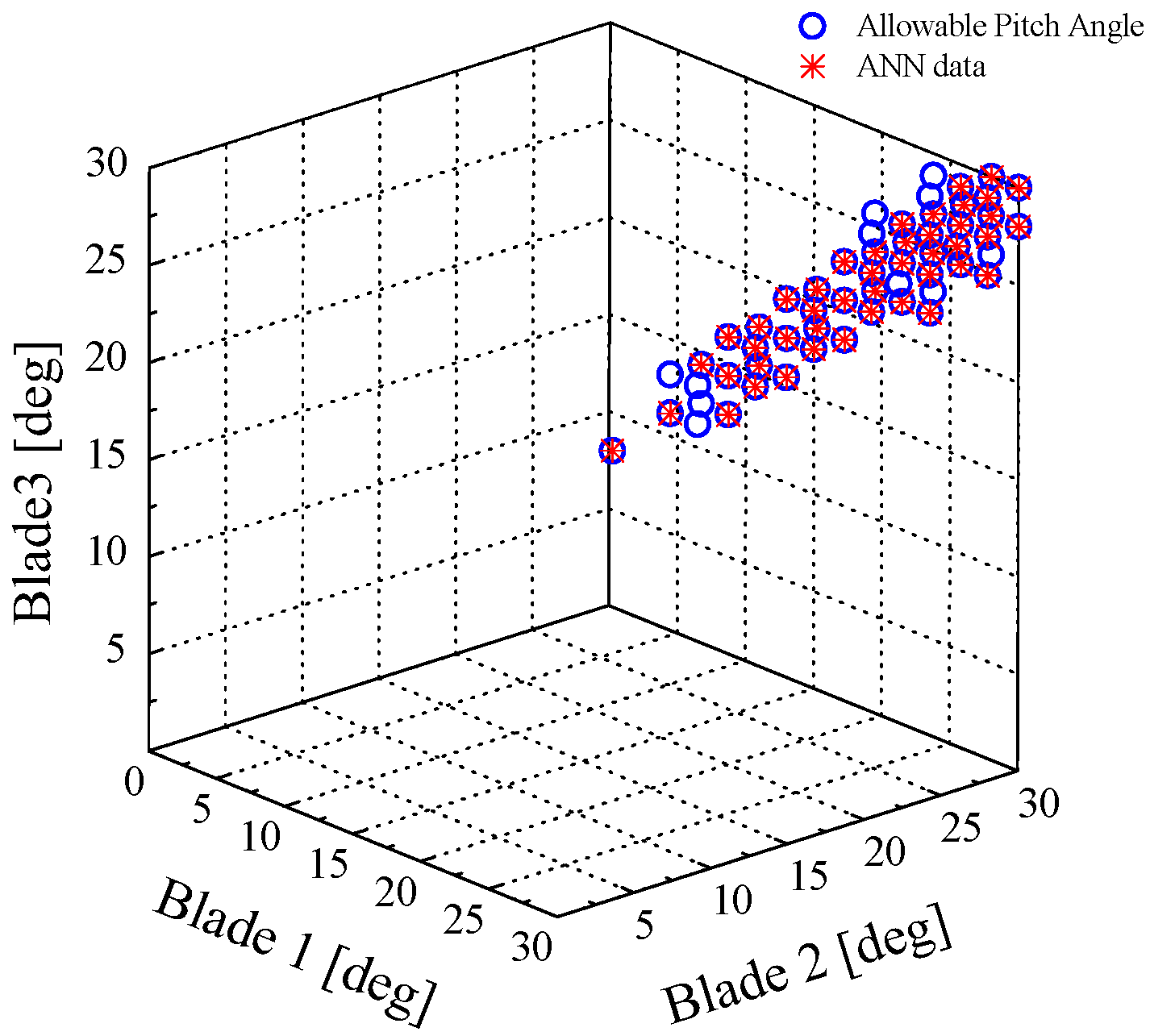
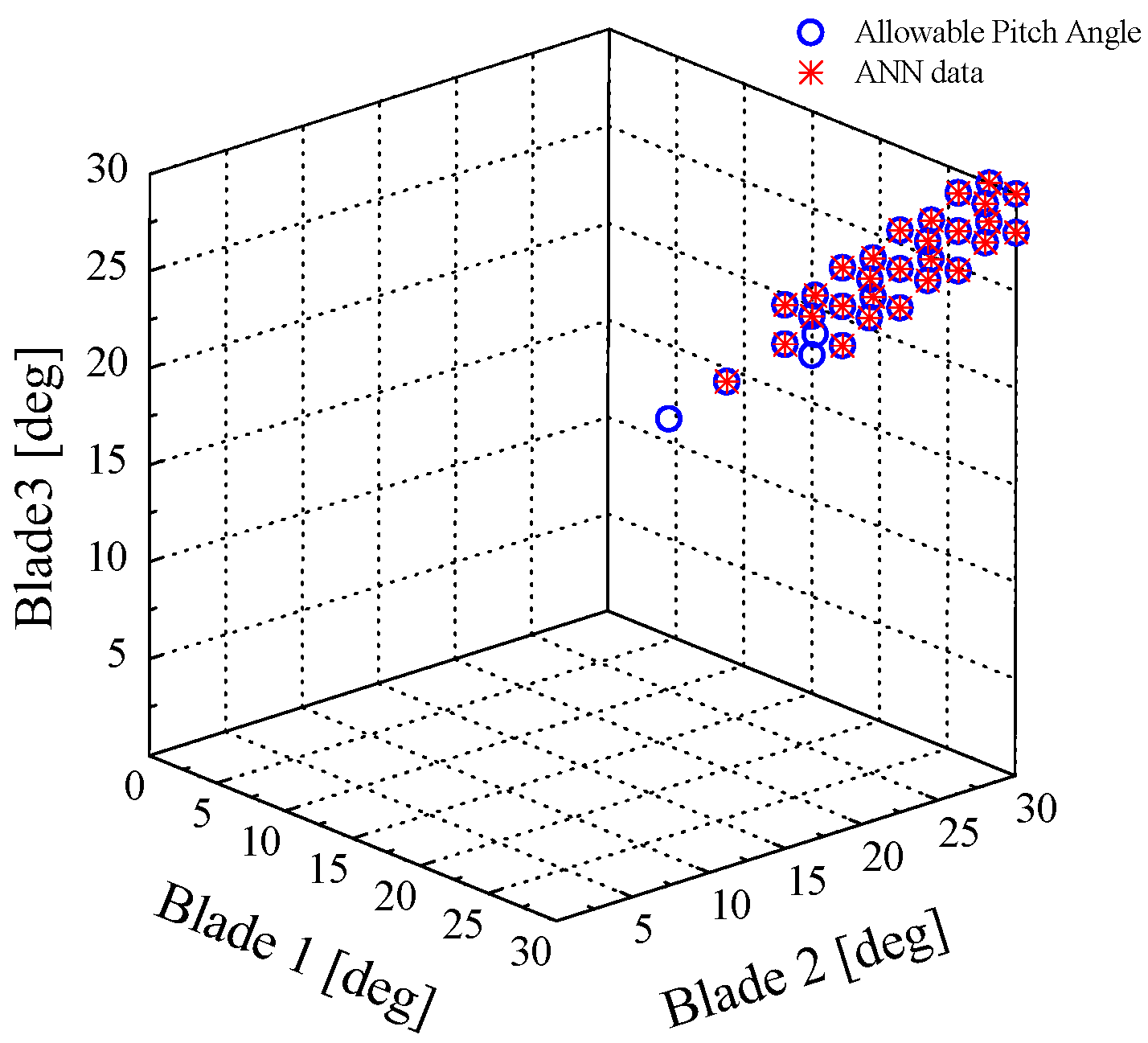
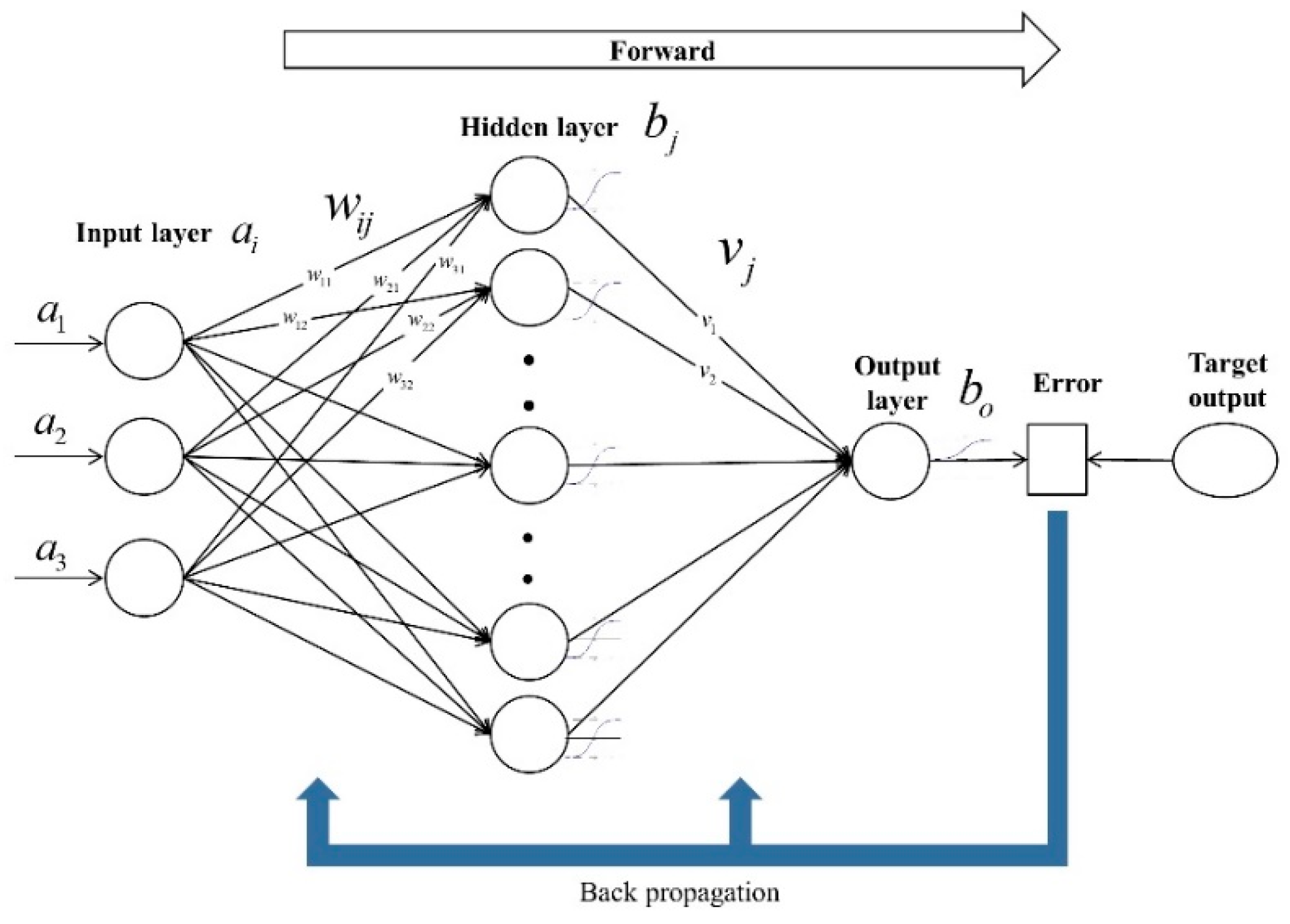
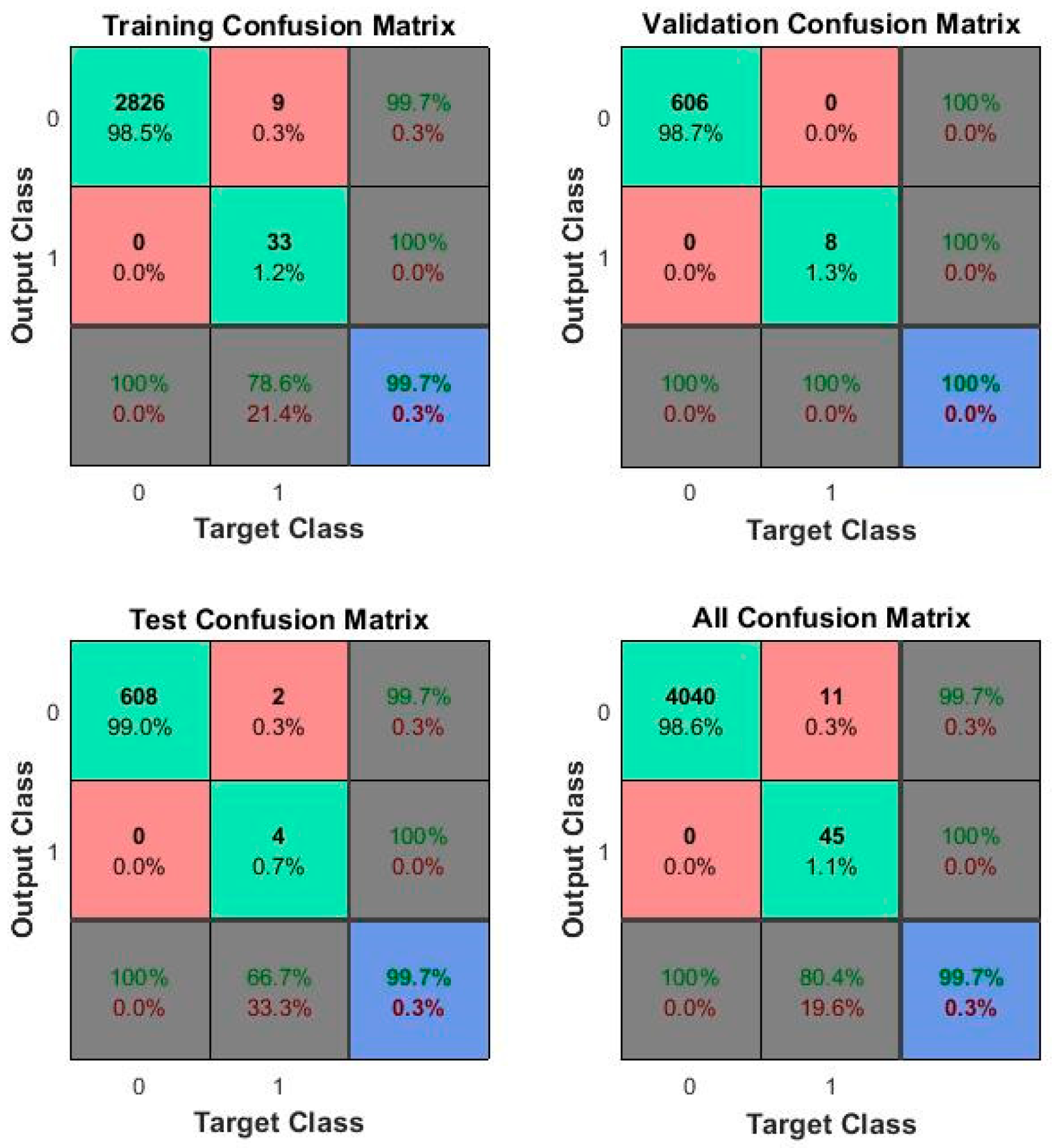
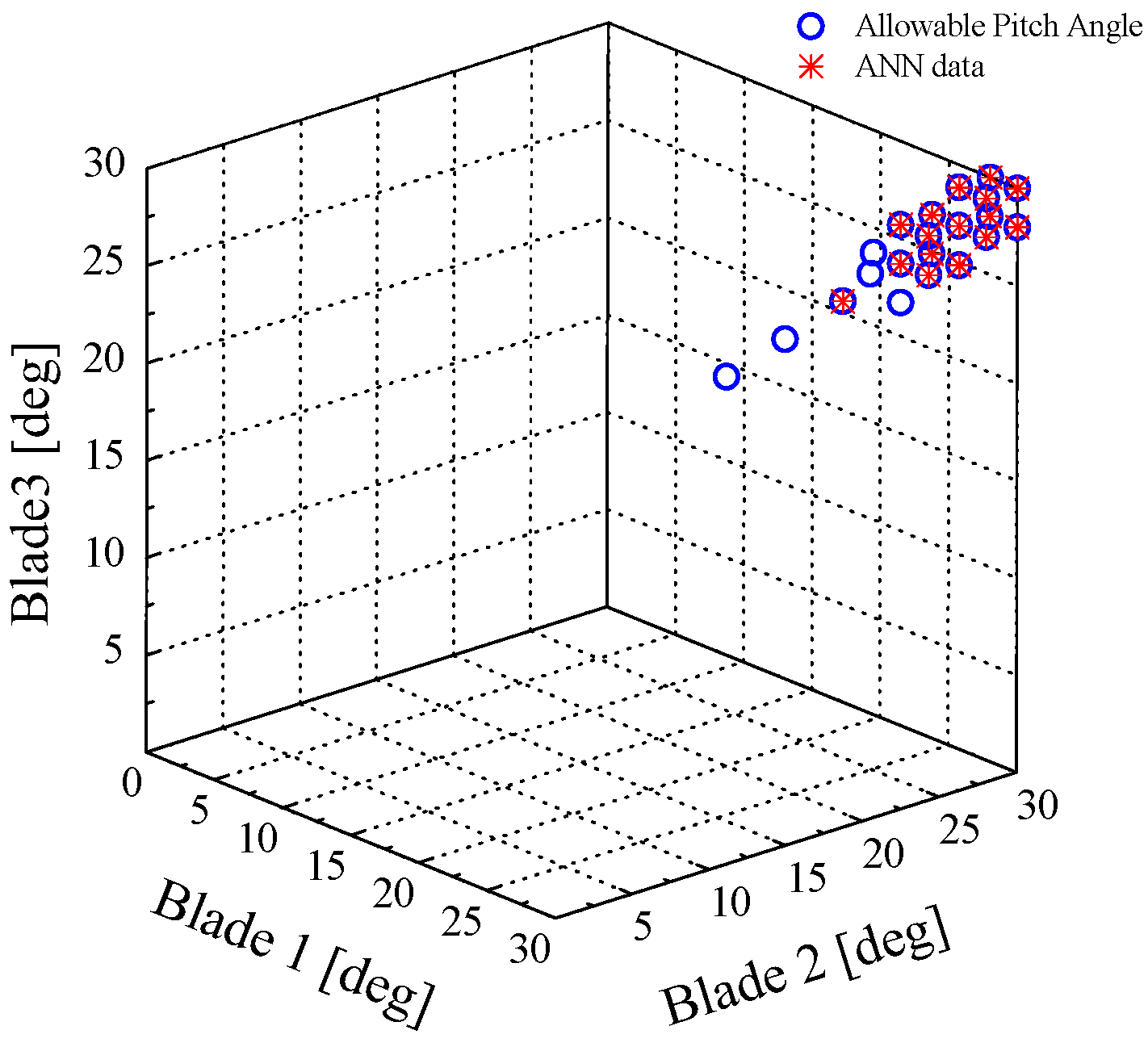
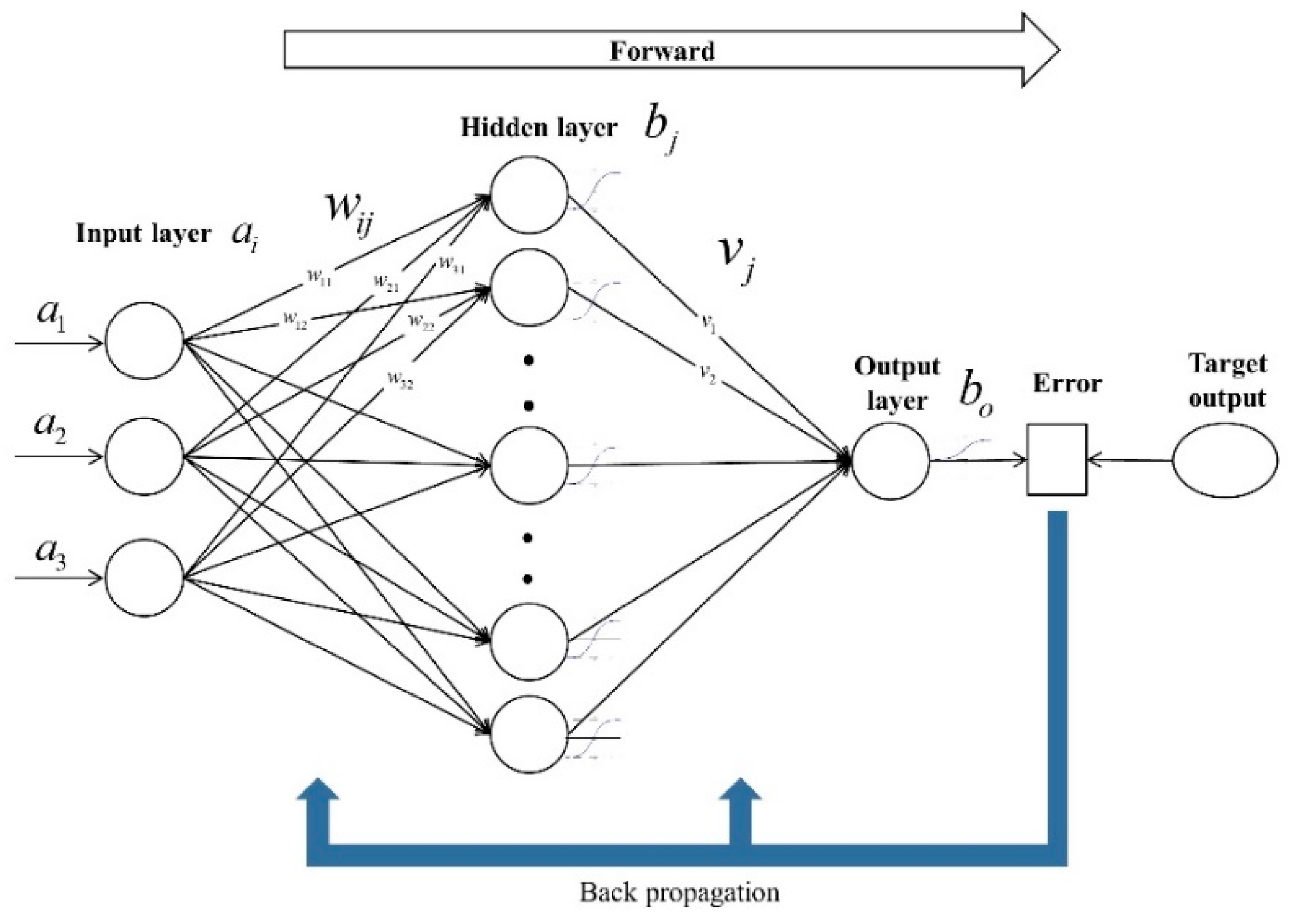
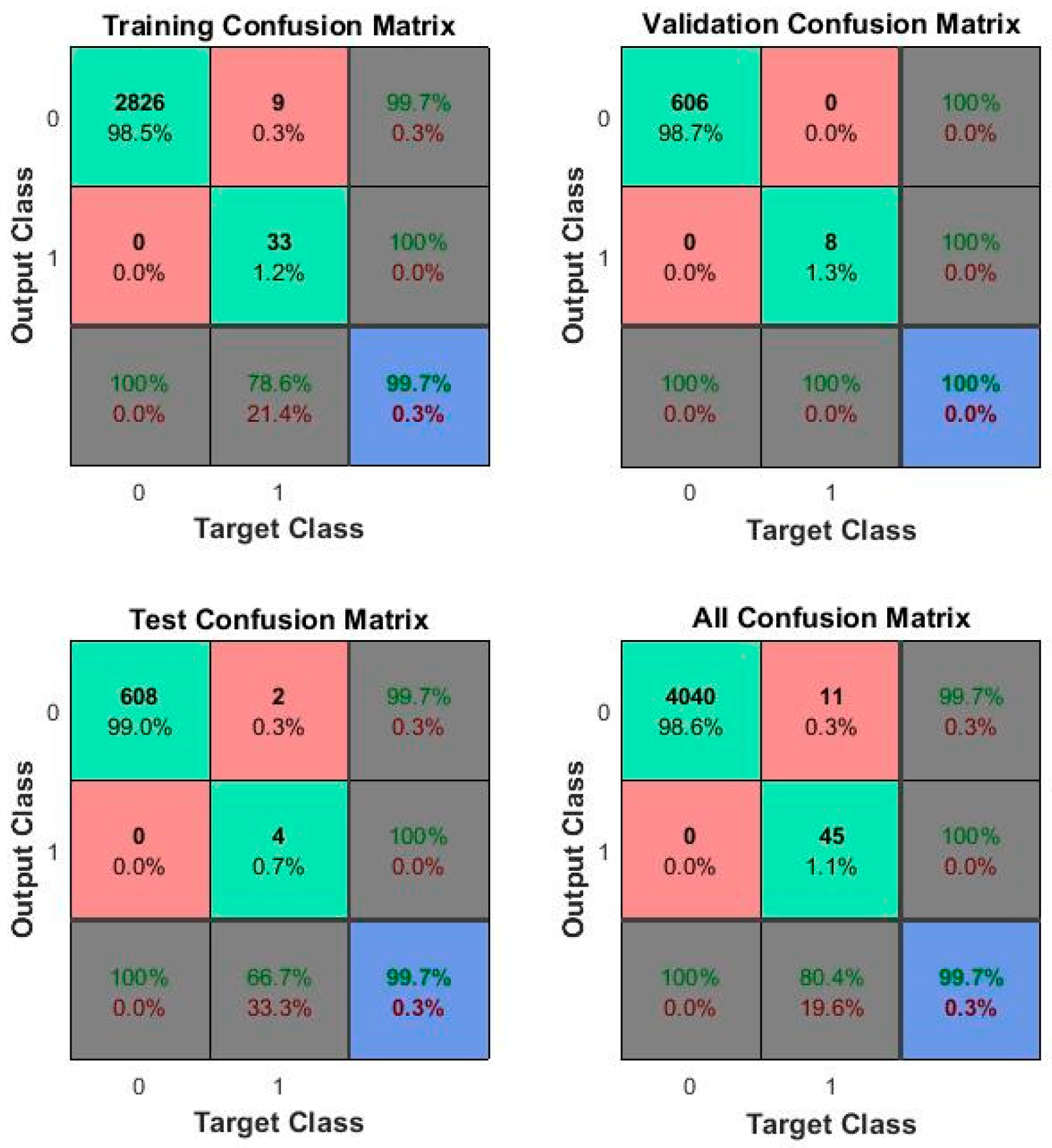
- We proposed the pattern analysis procedure to implement the meta models for APA region at each wind speed using the artificial neural network (ANN), which is one of the machine learning techniques. The prediction results for the APA region using the ANN very well matched the APA analysis results by ultimate loads analysis. This approach may be used to reduce blade loads due to the relative pitch angle deviation under aerodynamic imbalance.
- (4)
- This decision can only be generalized to this wind turbine. Applicability to other wind turbines will require further testing and studies. In addition, further studies considering comparative evaluations with other researchers’ IPCs are recommended.
Author Contributions
Funding
Conflicts of Interest
References
- Pire, T.; Le Sourne, H.; Echeverry, S.; Rigo, P. Analytical formulations to assess the energy dissipated at the base of an offshore wind turbine jacket impacted by a ship. Mar. Struct. 2018, 59, 192–218. [Google Scholar] [CrossRef]
- Nagel, T.; Julien, C.; Wirth, A.; Bonamy, C. On the multi-scale interactions between an offshore-wind-turbine wake and the ocean-sediment dynamics in an idealized framework—A numerical investigation. Renew. Energy 2018, 115, 783–796. [Google Scholar] [CrossRef]
- Taylor, J.W.; Jeon, J.Y. Probabilistic forecasting of wave height for offshore wind turbine maintenance. Eur. J. Oper. Res. 2018, 267, 877–890. [Google Scholar] [CrossRef]
- Rezaeiha, A.; Pereira, R.; Kotsonis, M. Fluctuations of angle of attack and lift coefficient and the resultant fatigue loads for a large Horizontal Axis Wind turbine. Renew. Energy 2017, 114, 904–916. [Google Scholar] [CrossRef]
- Engelen, T. Design Model and Load Reduction Assessment for Multi- rotational Mode Individual Pitch Control. In Proceedings of the European Wind Energy Conference (EWEC 2006), Athens, Greece, 27 February–2 March 2006. [Google Scholar]
- Bossanyi, E. Individual Blade Pitch Control for Load Reduction. Wind Energy 2003, 6, 119–128. [Google Scholar] [CrossRef]
- Larsen, T.J.; Madsen, H.A.; Thomsen, K. Active Load Reduction Using Individual Pitch, Based on Local Blade Flow Measurements. Wind Energy 2005, 8, 67–80. [Google Scholar] [CrossRef]
- Sarkar, S.; Fitzgerald, B.; Basu, B. Individual Blade Pitch Control of Floating Offshore Wind Turbines for Load Mitigation and Power Regulation. IEEE Trans. Control. Syst. Technol. 2021, 29, 305–315. [Google Scholar] [CrossRef]
- Aghaeinezhad, S.M.; Taghizadeh, M.; Mazare, M.; Kazemi, M.G. Individual Pitch Angle Control of a Variable Speed Wind Turbine Using Adaptive Fractional Order Non-Singular Fast Terminal Sliding Mode Control. Int. J. Precis. Eng. Manuf. 2021, 22, 511–522. [Google Scholar] [CrossRef]
- Lara, M.; Garrido, J.; Ruz, M.L.; Vázquez, F. Adaptive Pitch Controller of a Large-Scale Wind Turbine Using Multi-Objective Optimization. Appl. Sci. 2021, 11, 2844. [Google Scholar] [CrossRef]
- Hanifi, S.; Liu, X.; Lin, Z.; Lotfian, S. A Critical Review of Wind Power Forecasting Methods—Past, Present and Future. Energies 2020, 13, 3764. [Google Scholar] [CrossRef]
- Robertson, A.N.; Shaler, K.; Sethuraman, L.; Jonkman, J. Sensitivity analysis of the effect of wind characteristics and turbine properties on wind turbine loads. Wind. Energy Sci. 2019, 4, 479–513. [Google Scholar] [CrossRef] [Green Version]
- Niebsch, J.; Ramlau, R.; Nguyen, T.T. Mass and Aerodynamic Imbalance Estimates of Wind Turbines. Energies 2010, 3, 696–710. [Google Scholar] [CrossRef] [Green Version]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009.
- Vemula, N.K. Design Solution for the Upwind Reference Offshore Support Structure; Ramboll: Esbjerg, Denmark, 2010. [Google Scholar]
- Cordle, A.; Kaufer, D.; Vorpahl, F.; Fischer, T. Final Report for WP4.3: Enhancement of Design Methods and Standards; Garrad Hassan and Partners Ltd.: Bristol, UK, 2011. [Google Scholar]
- Kim, B.S.; Jin, J.W.; Bitkina, O.; Kang, K.W. Ultimate load characteristics of NREL 5-MW offshore wind turbines with different substructures. Int. J. Energy Res. 2016, 40, 639–650. [Google Scholar] [CrossRef]
- GL Garrad Hassan. GH-BladedTM. version 4.1.
- Demuth, H.; Beale, M.; Hagan, M. Neural Network ToolboxTM User’s Guide; The MathWorks: Natick, MA, USA, 2009. [Google Scholar]
- Moller, M.F. A scaled conjugate gradient algorithm for fast supervised learning. Neural Netw. 1993, 6, 525–533. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated power | 5 MW |
| Class | IB |
| No. of blade | 3 |
| Blade length | 61.5 m |
| Hub height | 90.55 m |
| Tower height | 88.15 m |
| Cut-in, Rated, Cut-out wind speed | 3 m/s, 11.4 m/s, 25 m/s |
| Cut-in, Rated rotational speed | 6.9 rpm, 12.1 rpm |
| Rotor overhang | 5 m |
| Rotor position | Upwind |
| Transmission | Gearbox |
| Power control | Pitch/Permanently stuck |
| Fixed/Variable | Variable |
| Gear ratio | 97 |
| Substructure type | Jacket |
| Wind Condition | Steady State (Constant Wind) |
| Wind shear | 0.1 |
| Tower shadow factor | 1 |
| Yaw position error | 8° |
| Wind speed (m/s) | 11, 14, 17, 20, 22, 24 |
| Individual pitch angle (Deg.) | 0, 2, 4, ···, 30 |
| Pitch control | Fixed pitch |
| No. of blade | 3 |
| Total number of cases |
| Steady Wind Speed (m/s) | MRc (kNm) | FRc (kN) | Pitch Angles |
|---|---|---|---|
| 11 | 3677 | 1280 | 0° |
| 14 | 4469 | 1227 | 6.3° |
| 17 | 4516 | 1179 | 11.6° |
| 20 | 4581 | 1154 | 15.9° |
| 22 | 4632 | 1143 | 18.5° |
| 24 | 4706 | 1133 | 20.8° |
| a3 (Blade 3) | a1 (Blade 1), a2 (Blade 2) | |||||
|---|---|---|---|---|---|---|
| 11 m/s | 14 m/s | 17 m/s | 20 m/s | 22 m/s | 24 m/s | |
| 4° | 2°~6° | |||||
| 6° | 4°~10° | |||||
| 8° | 6°~12° | 8°~10° | ||||
| 10° | 6°~14° | 8°~14° | ||||
| 12° | 8°~18° | 10°~16° | 12°~14° | |||
| 14° | 10°~20° | 10°~20° | 12°~16° | |||
| 16° | 12°~22° | 12°~22° | 14°~20° | 16° | ||
| 18° | 12°~26° | 14°~24° | 16°~22° | 18°~20° | ||
| 20° | 14°~30° | 14°~26° | 16°~24° | 18°~22° | 20° | 20° |
| 22° | 16°~30° | 16°~30° | 18°~26° | 20°~24° | 22°~24° | 22° |
| 24° | 18°~30° | 18°~30° | 20°~28° | 22°~28° | 22°~26° | 24°~26° |
| 26° | 20°~30° | 20°~30° | 22°~30° | 24°~30° | 24°~28° | 24°~28° |
| 28° | 20°~30° | 22°~30° | 24°~30° | 24°~30° | 26°~30° | 26°~30° |
| 30° | 20°~30° | 22°~30° | 26°~30° | 26°~30° | 28°~30° | 28°~30° |
| Steady Wind Speed (m/s) | Moment | ||
|---|---|---|---|
| Success Rate (%) | Neuron Number | ||
| Stationaryhub | 11 | 99.5 | 10 |
| 14 | 99.4 | 10 | |
| 17 | 99.8 | 10 | |
| 20 | 99.7 | 10 | |
| 22 | 100 | 20 | |
| 24 | 99.8 | 10 | |
| Average | 99.7 | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, B.-S.; Jung, D.-Y.; Jang, Y.-J.; Kang, K.-W. Allowable Pitch Angle of Aerodynamic Imbalance Due to Individual Pitch Movement for Ultimate Loads on Offshore Wind Turbine Using Artificial Neural Network. Appl. Sci. 2022, 12, 5177. https://doi.org/10.3390/app12105177
Kim B-S, Jung D-Y, Jang Y-J, Kang K-W. Allowable Pitch Angle of Aerodynamic Imbalance Due to Individual Pitch Movement for Ultimate Loads on Offshore Wind Turbine Using Artificial Neural Network. Applied Sciences. 2022; 12(10):5177. https://doi.org/10.3390/app12105177
Chicago/Turabian StyleKim, Bae-Sung, Dae-Yi Jung, Yun-Jung Jang, and Ki-Weon Kang. 2022. "Allowable Pitch Angle of Aerodynamic Imbalance Due to Individual Pitch Movement for Ultimate Loads on Offshore Wind Turbine Using Artificial Neural Network" Applied Sciences 12, no. 10: 5177. https://doi.org/10.3390/app12105177
APA StyleKim, B.-S., Jung, D.-Y., Jang, Y.-J., & Kang, K.-W. (2022). Allowable Pitch Angle of Aerodynamic Imbalance Due to Individual Pitch Movement for Ultimate Loads on Offshore Wind Turbine Using Artificial Neural Network. Applied Sciences, 12(10), 5177. https://doi.org/10.3390/app12105177