
A Hybrid Approach for an Efficient Estimation and Control of Permanent Magnet Synchronous Motor with Fast Dynamics and Practically Unavailable Measurements

 , , , ,
, , , ,  ,
,  , and
, and 
Abstract
:1. Introduction
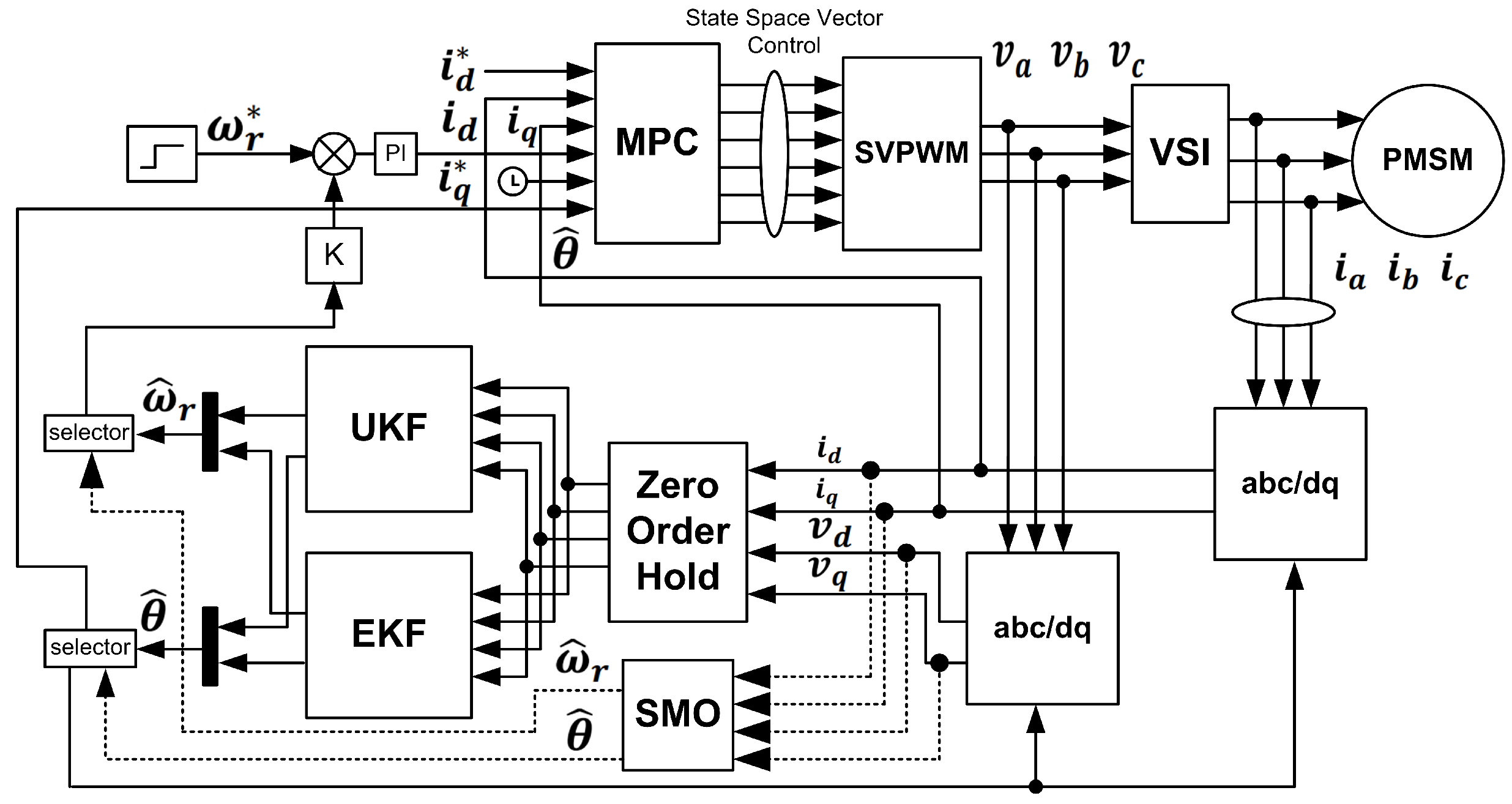
- A hybrid approach, MPC-UKF, is tuned to a challenging PMSM control and estimation problem in order to efficiently deal with the issues of fastly varying dynamics, severe nonlinearities, random uncertainties, and unavailability of measurements [22].
- The MPC and the UKF are efficient control and estimation algorithms, respectively, and extension of these as a combination creates a novel solution to the challenges. Parametric invariance, disturbance rejection, and improved accuracy and estimates are the advantages of our proposed novel hybrid technique [23].
- In an effort to closely replicate the practical PMSM dynamics and to have more realistic findings with respect to the actual experimental setup, the practical factors, such as disturbances and uncertainties, process and measurement noise, have been taken into account. Such efforts certainly allow the observer, the UKF, to provide more accurate estimates that are otherwise sacrificed due to inappropriate, inaccurate, or incomplete system information. The UKF is successfully tuned to estimate speed and position of PMSM based on the direct available states, currents, and voltages.
- The MPC-UKF approach is compared with the combination of the MPC with state-of-the-art observer technique, the Sliding Mode Observer (SMO), and also with the more traditional approach, the EKF, in terms of robustness and reliability.
2. Modeling of Permanent Magnet Synchronous Motor
3. Description of Control Schemes
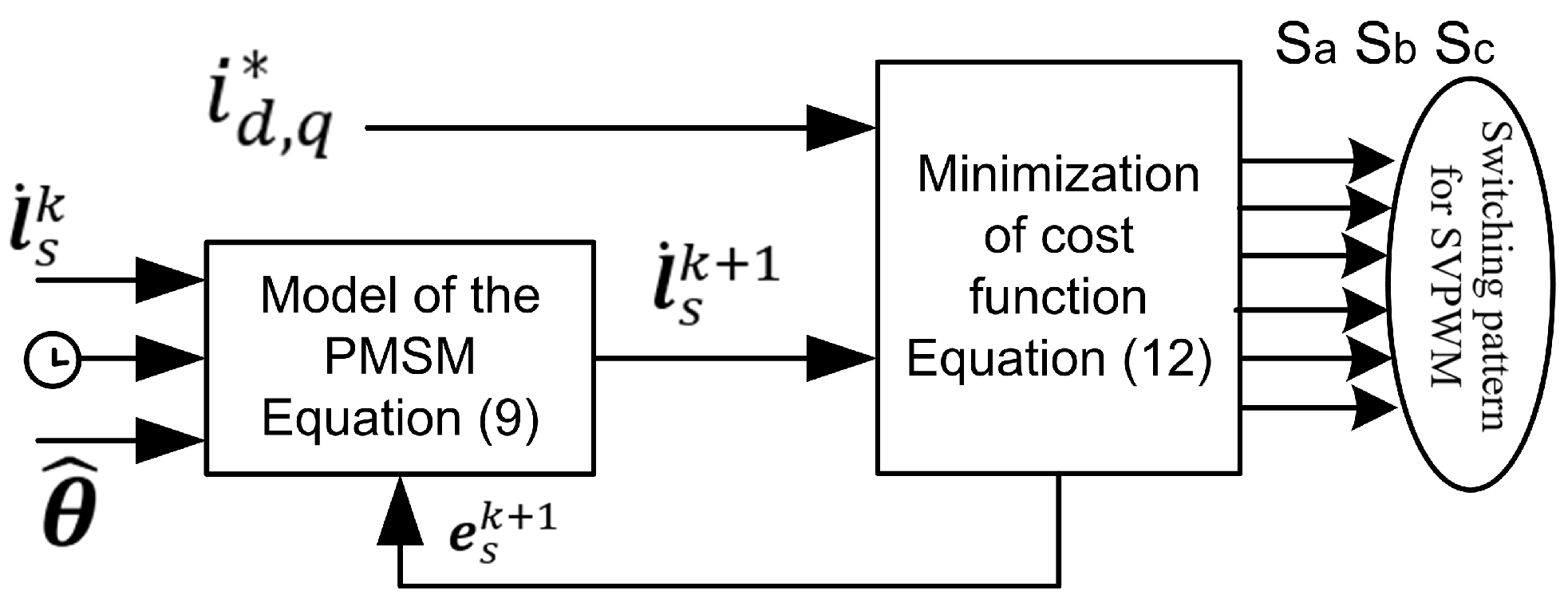
3.1. Modeling of Model Predictive Control
3.2. Integrating SMO with MPC
3.3. Integrating EKF with MPC
- Step 1:
- Prediction
- Step 2:
- Measurement
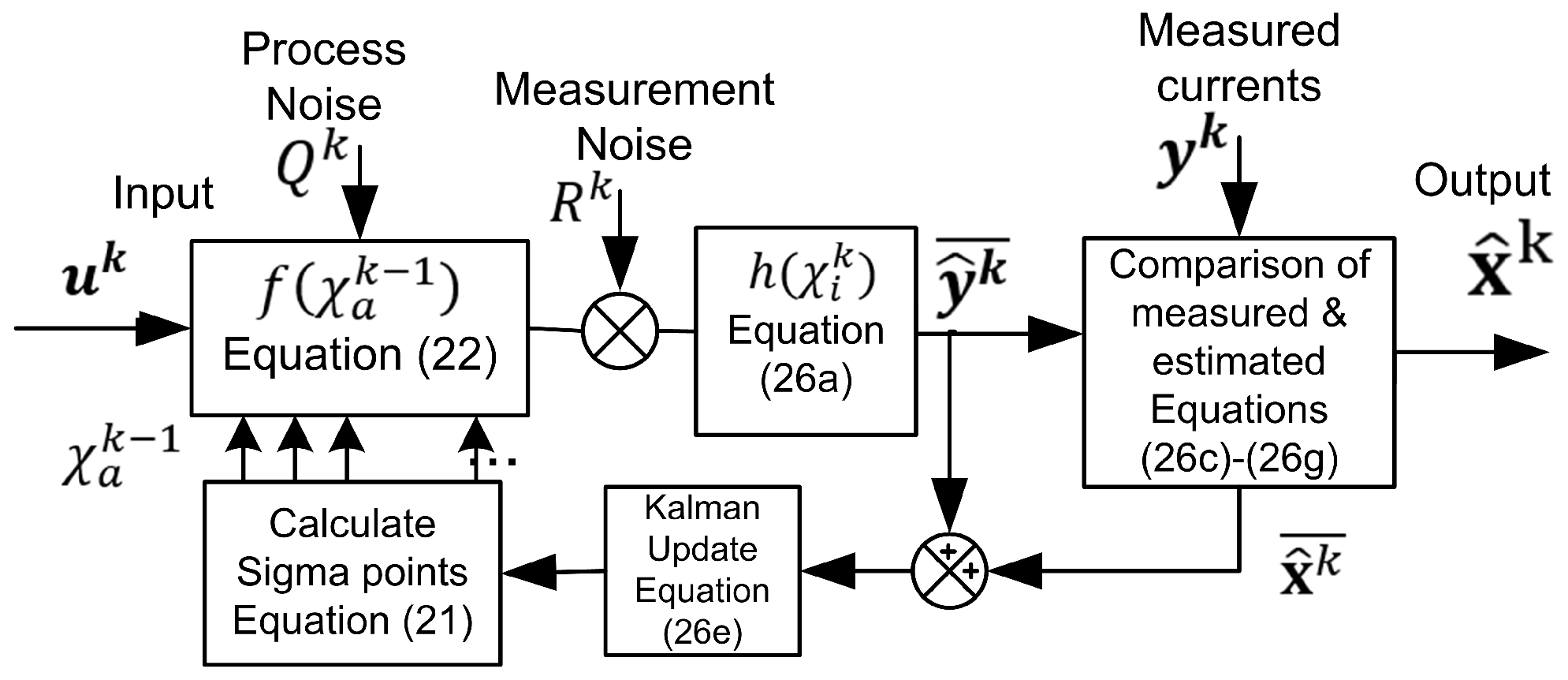
3.4. Integrating UKF with MPC
- Step 1:
- Initialization
- Step 2:
- Calculation of Sigma Points
- Step 3:
- Propagation of Sigma Points through nonlinear function
- Step 4:
- Prediction mean and covariance
- Step 5:
- Measurement update
4. Results and Discussions
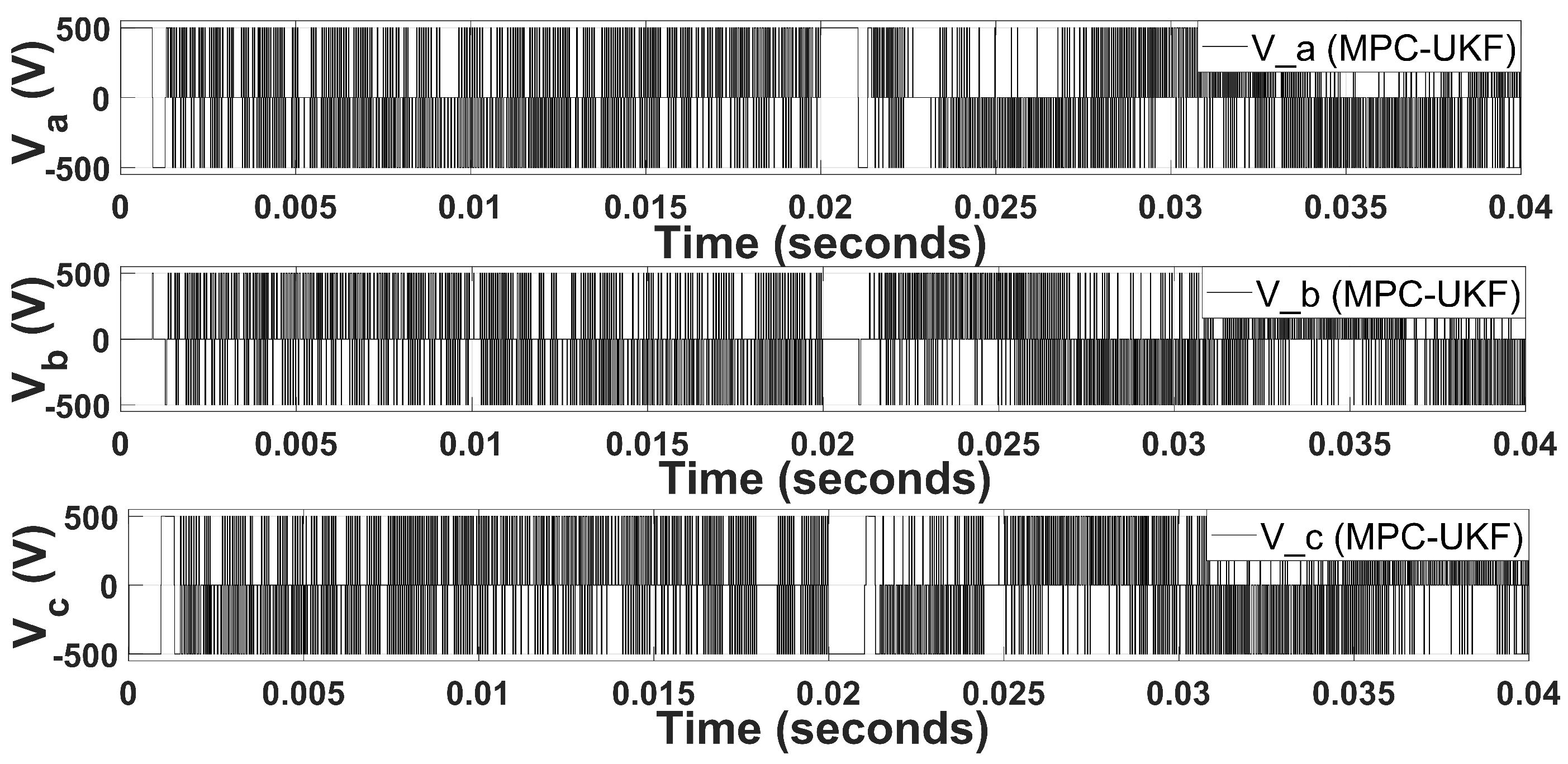
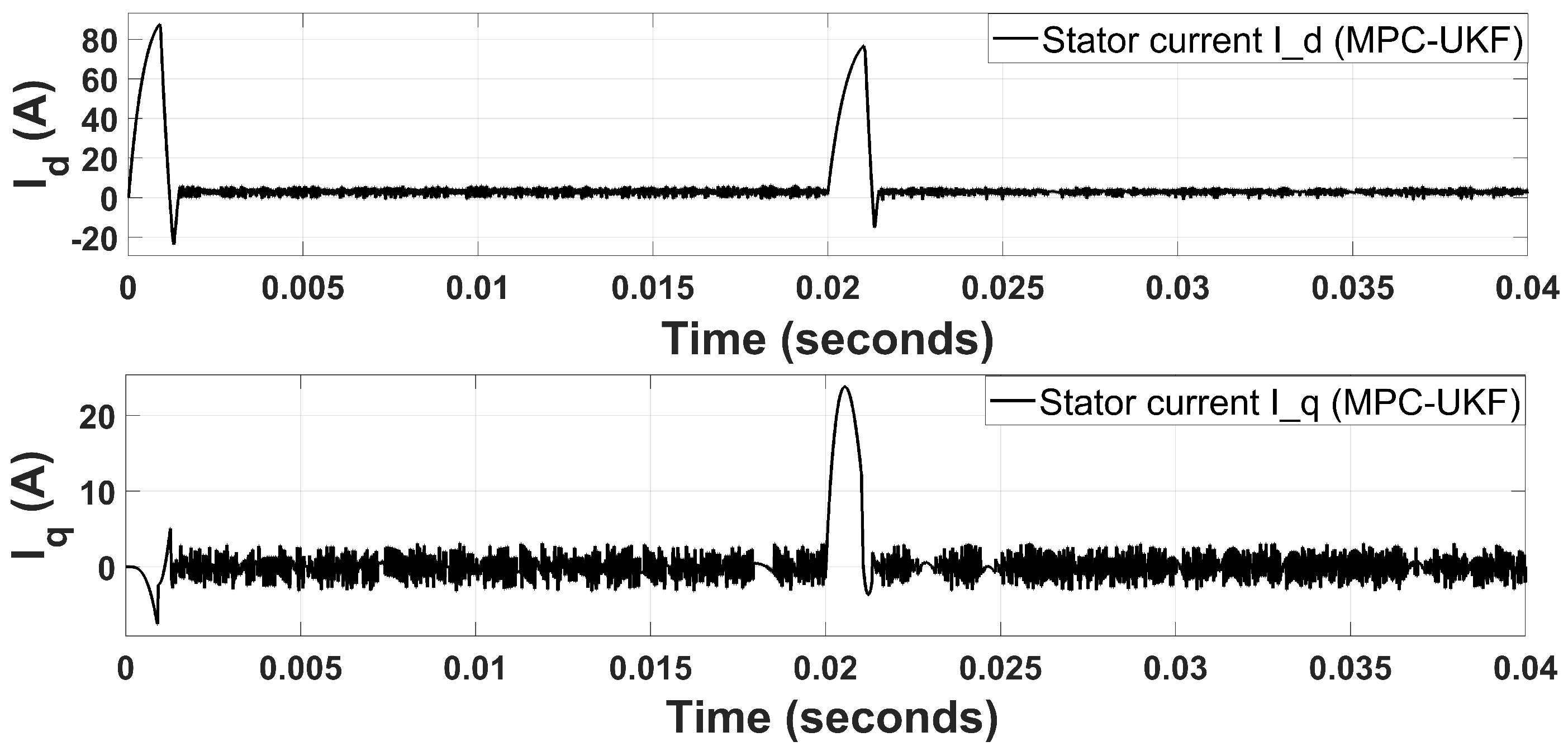
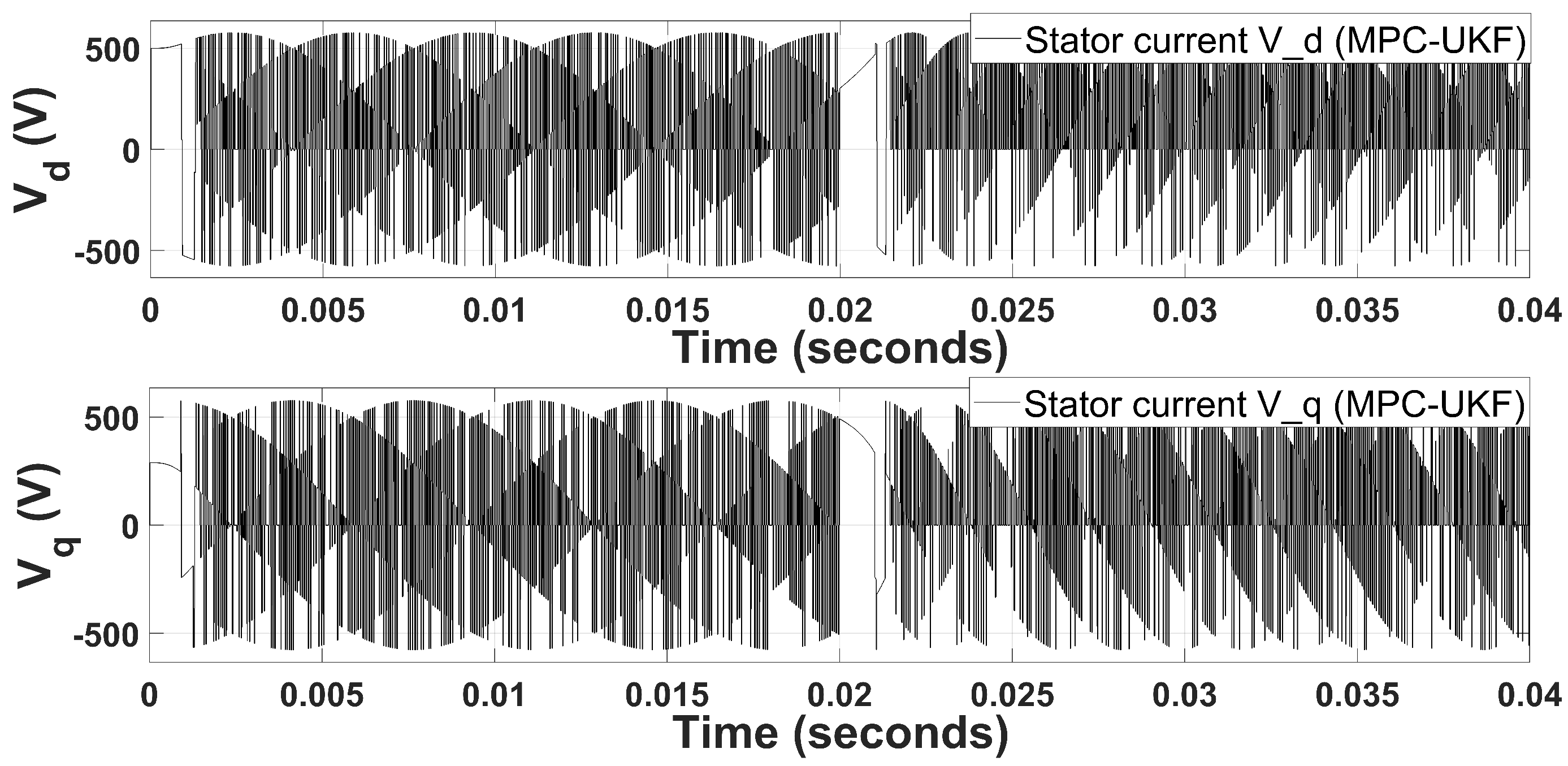
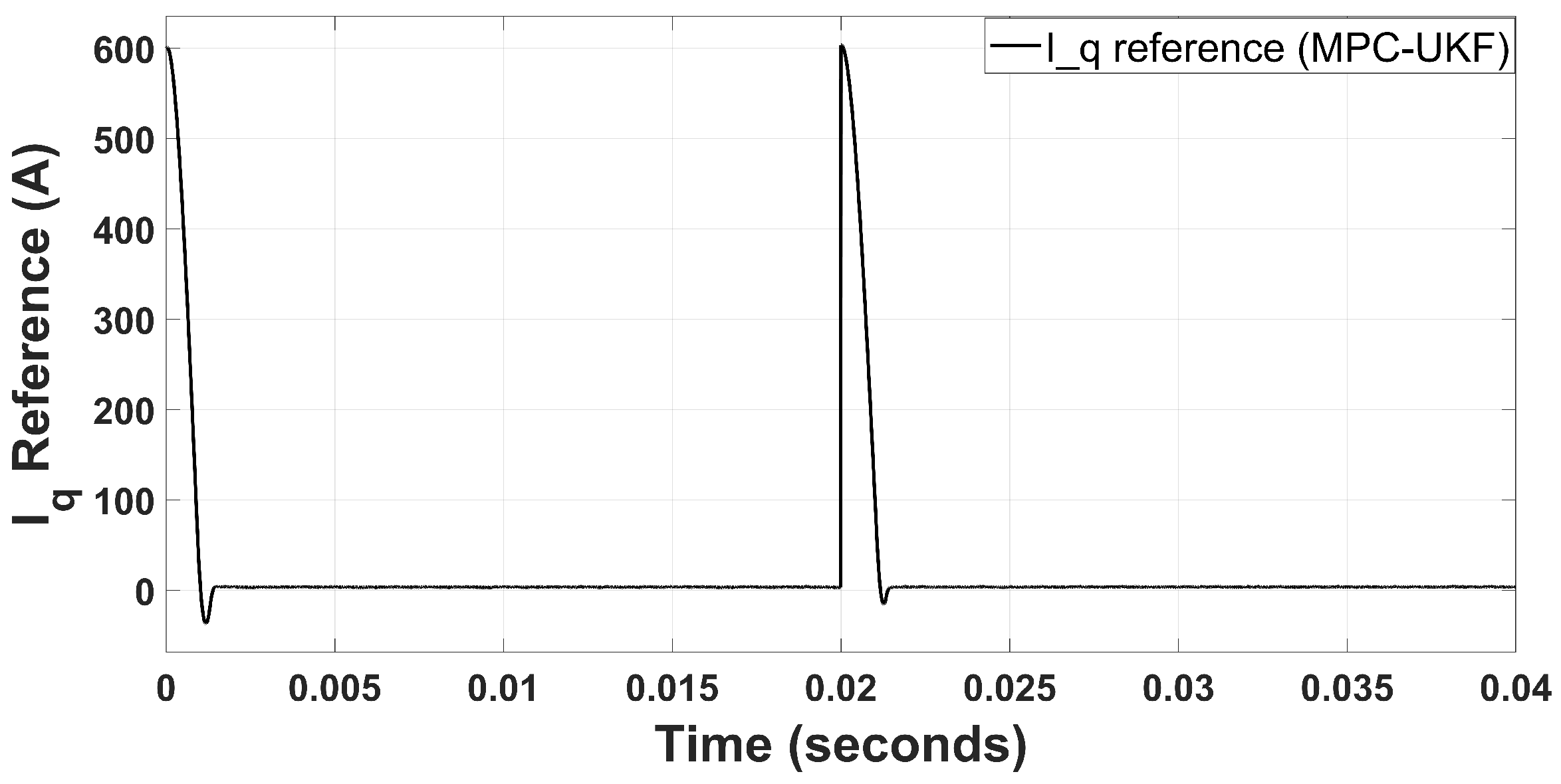
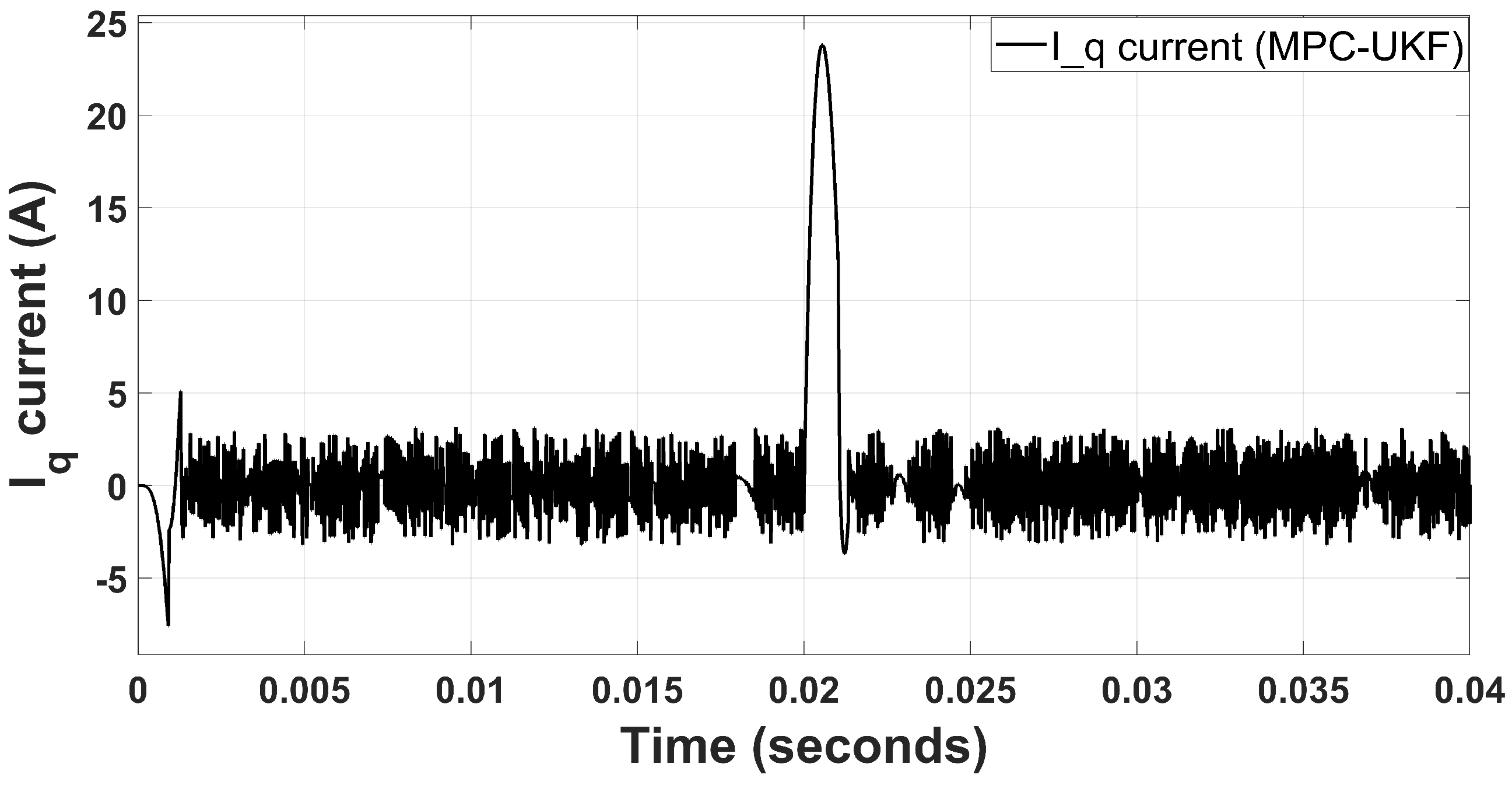
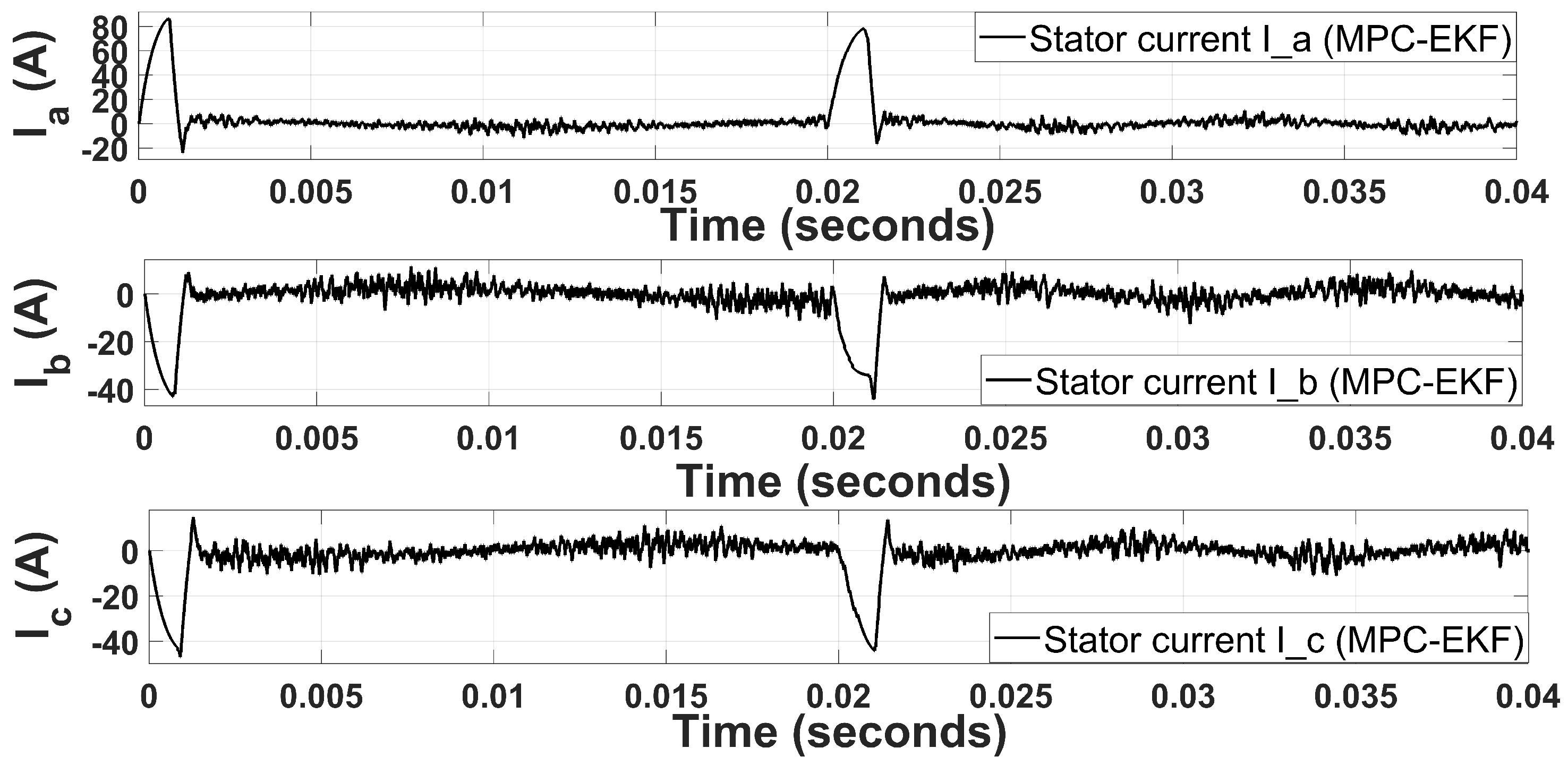
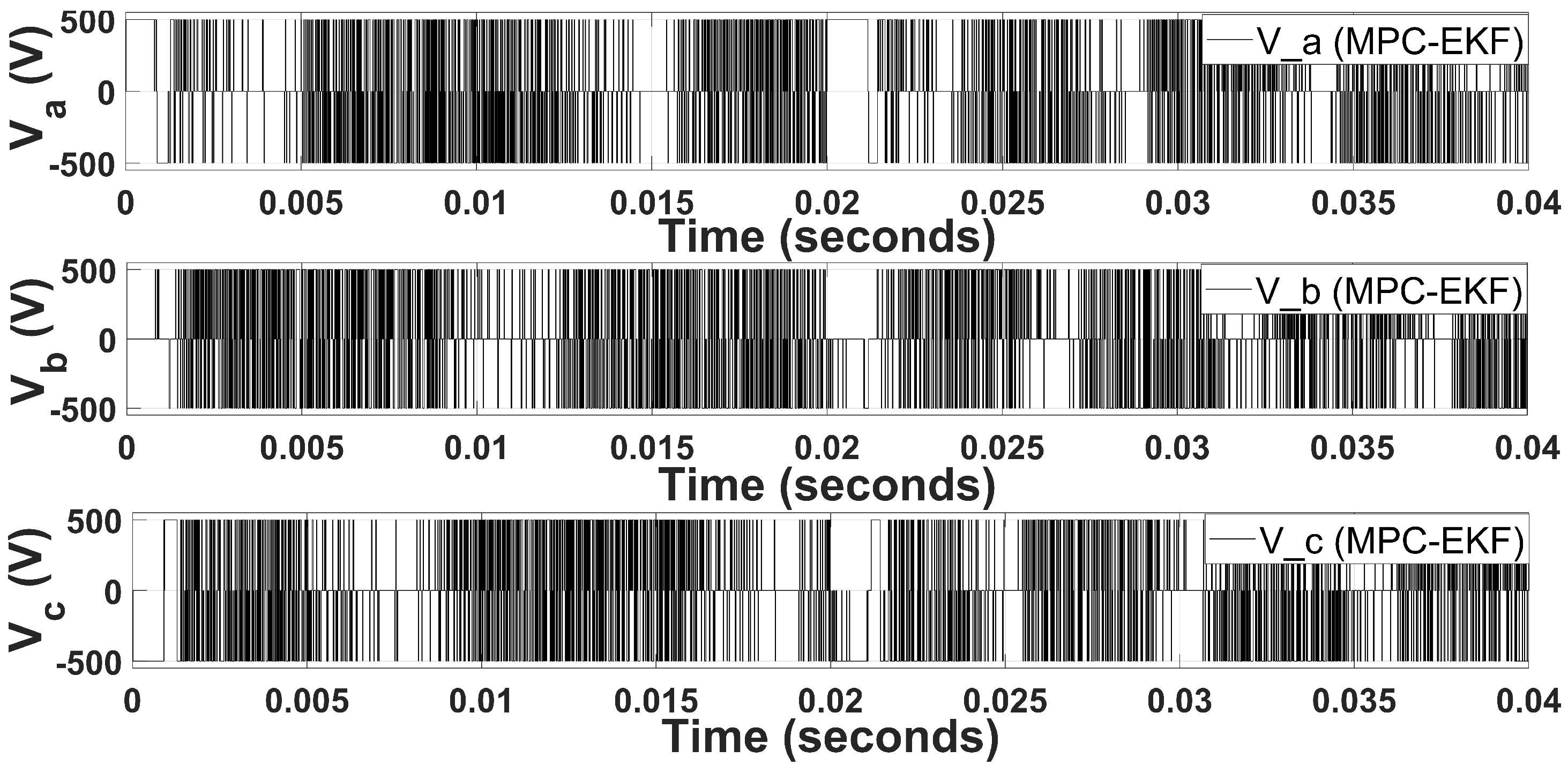
4.1. Stator Current and Voltage Comparison
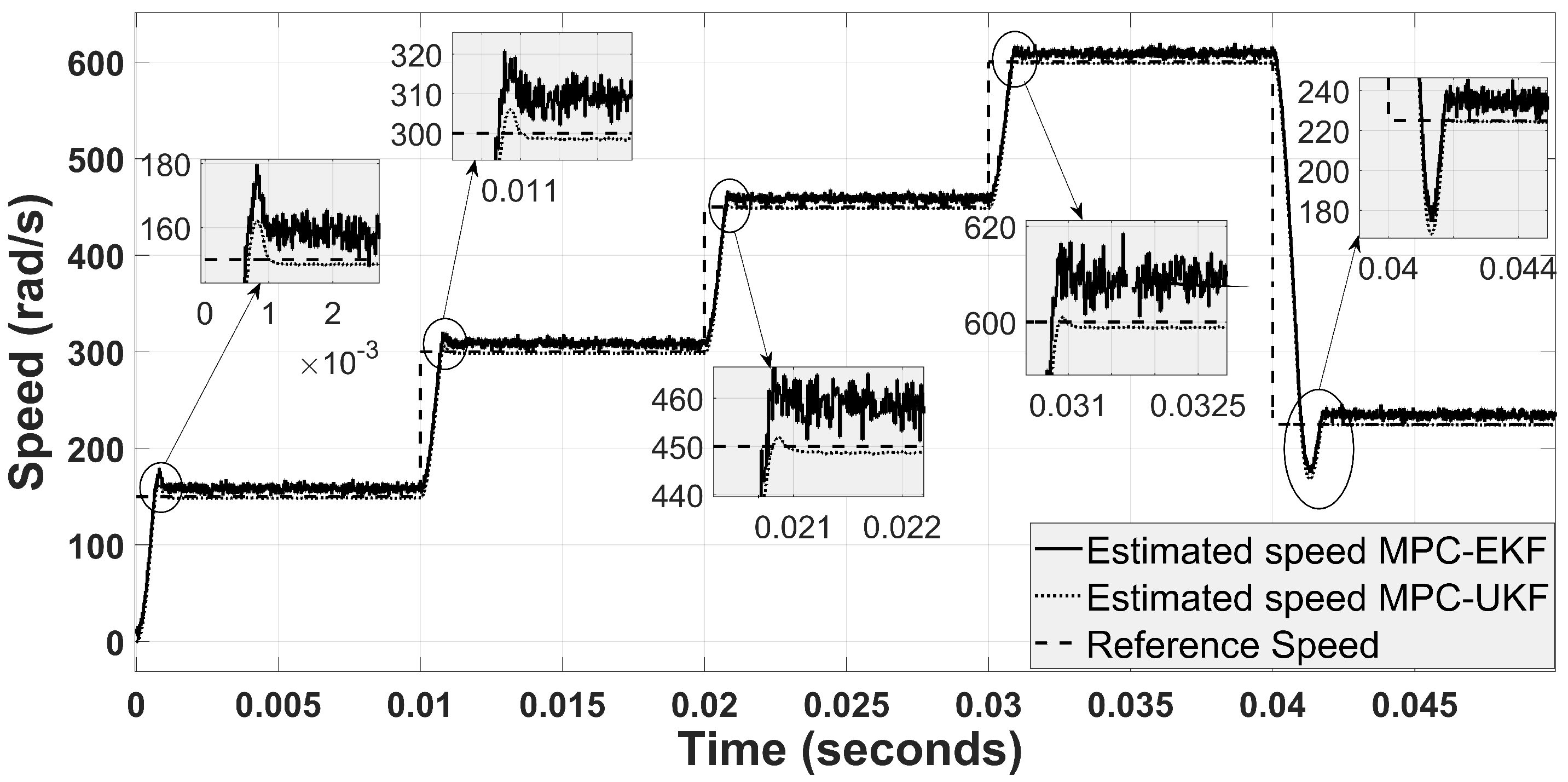
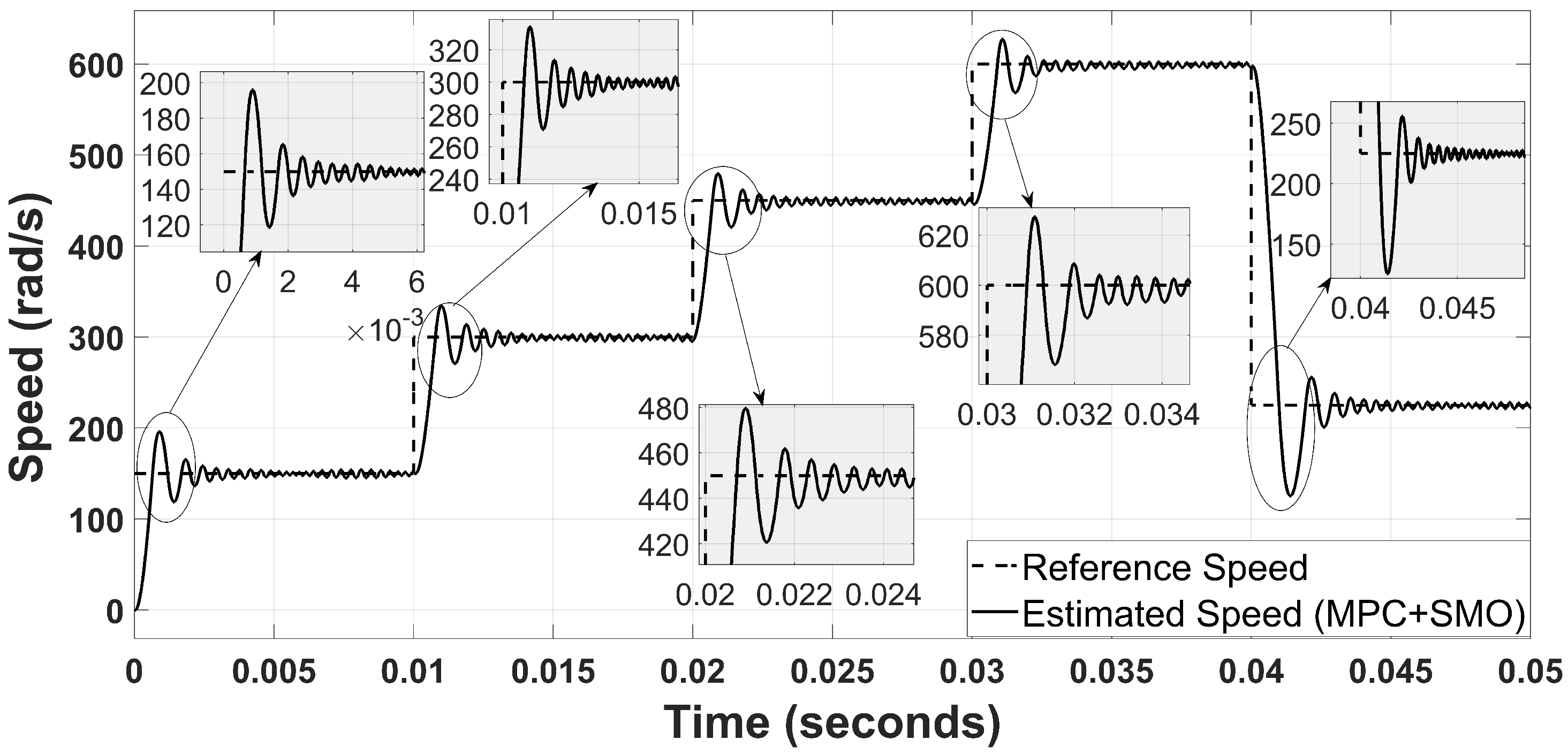
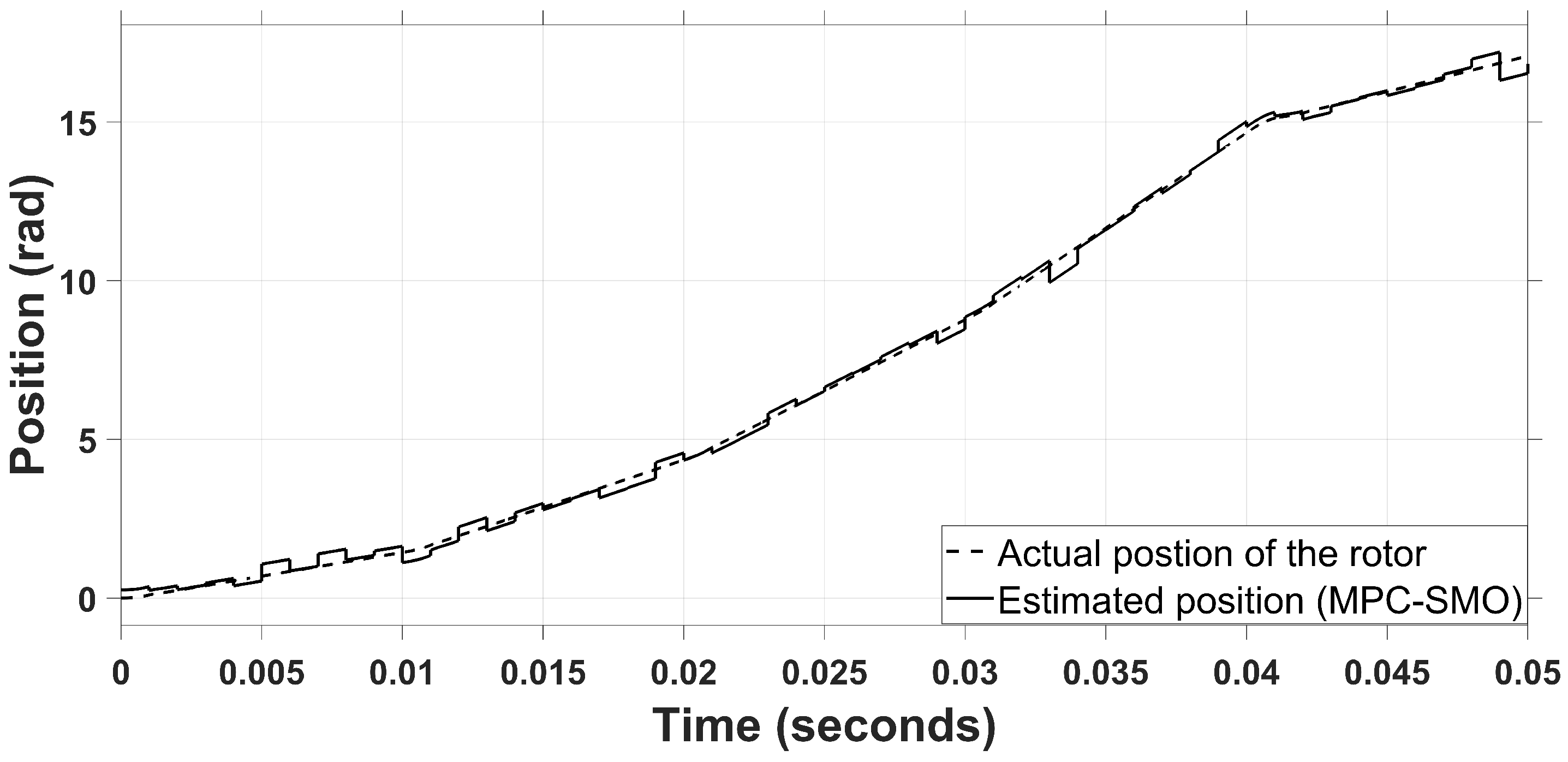
4.2. Speed and Position Comparison
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Ali, S.M.; Jawad, M.; Guo, F.; Mehmood, A.; Khan, B.; Glower, J.; Khan, S.U. Exact feedback linearization-based permanent magnet synchronous generator control. Int. Trans. Electr. Energy Syst. 2016, 26, 1917–1939. [Google Scholar] [CrossRef]
- Blazek, V.; Slanina, Z.; Petruzela, M.; Hrbáč, R.; Vysockỳ, J.; Prokop, L.; Misak, S.; Walendziuk, W. Error Analysis of Narrowband Power-Line Communication in the Off-Grid Electrical System. Sensors 2022, 22, 2265. [Google Scholar] [CrossRef]
- Yin, Z.; Li, G.; Zhang, Y.; Liu, J.; Sun, X.; Zhong, Y. A speed and flux observer of induction motor based on extended Kalman filter and Markov chain. IEEE Trans. Power Electron. 2016, 32, 7096–7117. [Google Scholar] [CrossRef]
- Mehmood, C.A.; Nasim, R.; Ali, S.M.; Jawad, M.; Usman, S.; Khan, S.; Salahuddin, S.; Ihsan, M.A.; Khawja, A. Robust speed control of interior permanent magnet synchronous machine “fractional order control”. In Proceedings of the IEEE International Conference on Electro/Information Technology, Milwaukee, WI, USA, 5–7 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 197–201. [Google Scholar]
- Xu, D.; Wang, B.; Zhang, G.; Wang, G.; Yu, Y. A review of sensorless control methods for AC motor drives. CES Trans. Electr. Mach. Syst. 2018, 2, 104–115. [Google Scholar] [CrossRef]
- Wang, F.; Mei, X.; Rodriguez, J.; Kennel, R. Model predictive control for electrical drive systems—An overview. CES Trans. Electr. Mach. Syst. 2017, 1, 219–230. [Google Scholar] [CrossRef]
- Borsje, P.; Chan, T.; Wong, Y.; Ho, S.L. A comparative study of Kalman filtering for sensorless control of a permanent-magnet synchronous motor drive. In Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15 May 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 815–822. [Google Scholar]
- Yin, Z.; Li, G.; Du, C.; Sun, X.; Liu, J.; Zhong, Y. An adaptive speed estimation method based on a strong tracking extended Kalman filter with a least-square algorithm for induction motors. J. Power Electron. 2017, 17, 149–160. [Google Scholar] [CrossRef]
- Madhukar, P.S.; Prasad, L. State Estimation using Extended Kalman Filter and Unscented Kalman Filter. In Proceedings of the 2020 International Conference on Emerging Trends in Communication, Control and Computing (ICONC3), Lakshmangarh, India, 21–22 February 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar]
- Zerdali, E. Adaptive extended Kalman filter for speed-sensorless control of induction motors. IEEE Trans. Energy Convers. 2018, 34, 789–800. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Z.; Huang, W.; Kennel, R.; Xie, W.; Wang, F. Encoderless sequential predictive torque control with SMO of 3L-NPC converter-fed induction motor drives for electrical car applications. In Proceedings of the 2019 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Quanzhou, China, 31 May–2 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Zerdali, E.; Barut, M. The comparisons of optimized extended Kalman filters for speed-sensorless control of induction motors. IEEE Trans. Ind. Electron. 2017, 64, 4340–4351. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T.; Kennel, R. On the choice of norm in finite control set model predictive control. IEEE Trans. Power Electron. 2017, 33, 7105–7117. [Google Scholar] [CrossRef]
- Abokhalil, A. Rotor Position Estimation of PMSM for Low and High Rotor Speed. J. Eng. Res. 2021, 9, 161–170. [Google Scholar]
- Haykin, S. Kalman Filtering and Neural Networks; John Wiley & Sons: Hoboken, NJ, USA, 2004; Volume 47. [Google Scholar]
- Duan, Z.; Akhtar, J.; Ghous, I.; Jawad, M.; Khosa, I.; Ali, K. Improving the tracking of subatomic particles using the unscented Kalman filter with measurement redundancy in high energy physics experiments. IEEE Access 2019, 7, 61728–61737. [Google Scholar] [CrossRef]
- Wang, F.; Davari, S.A.; Chen, Z.; Zhang, Z.; Khaburi, D.A.; Rodríguez, J.; Kennel, R. Finite control set model predictive torque control of induction machine with a robust adaptive observer. IEEE Trans. Ind. Electron. 2016, 64, 2631–2641. [Google Scholar] [CrossRef]
- Szabat, K.; Wróbel, K.; Dróżdż, K.; Janiszewski, D.; Pajchrowski, T.; Wójcik, A. A fuzzy unscented Kalman filter in the adaptive control system of a drive system with a flexible joint. Energies 2020, 13, 2056. [Google Scholar] [CrossRef]
- Wang, W.; Lu, Z.; Hua, W.; Wang, Z.; Cheng, M. A Hybrid Dual-Mode Control for Permanent-Magnet Synchronous Motor Drives. IEEE Access 2020, 8, 105864–105873. [Google Scholar] [CrossRef]
- Zawirski, K.; Janiszewski, D.; Muszynski, R. Unscented and extended Kalman filters study for sensorless control of PM synchronous motors with load torque estimation. Bull. Pol. Acad. Sci. Tech. Sci. 2013, 61, 793–801. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, Z. Multi-stage Series Model Predictive Control for PMSM Drives. IEEE Trans. Veh. Technol. 2021, 70, 6591–6600. [Google Scholar] [CrossRef]
- Jafarzadeh, S.; Lascu, C.; Fadali, M.S. State estimation of induction motor drives using the unscented Kalman filter. IEEE Trans. Ind. Electron. 2011, 59, 4207–4216. [Google Scholar] [CrossRef]
- Li, J.; Zhang, L.H.; Niu, Y.; Ren, H.P. Model predictive control for extended Kalman filter based speed sensorless induction motor drives. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 2770–2775. [Google Scholar]
- Zhang, X.; Zhao, Z. Model Predictive Control for PMSM Drives with Variable Dead-Zone Time. IEEE Trans. Power Electron. 2021, 36, 10514–10525. [Google Scholar] [CrossRef]
- Maanani, Y.; Menacer, A.; Harzelli, I. Comparative Study Between Sensorless Vector Control and Nonlinear Control for PMSM Based on Extended Kalman Filter (EKF). In Proceedings of the International Conference on Engineering Technologies (ICENTE’17), Konya, Turkey, 20–24 December 2017; pp. 173–185. [Google Scholar]
- Martin, C.; Arahal, M.R.; Barrero, F.; Durán, M.J. Five-phase induction motor rotor current observer for finite control set model predictive control of stator current. IEEE Trans. Ind. Electron. 2016, 63, 4527–4538. [Google Scholar] [CrossRef]
- Toso, F.; Da Ru, D.; Alotto, P.; Bolognani, S. A moving horizon estimator for the speed and rotor position of a sensorless pmsm drive. IEEE Trans. Power Electron. 2018, 34, 580–587. [Google Scholar] [CrossRef]
- Wei, Y.; Wei, Y.; Gao, Y.; Qi, H.; Guo, X.; Li, M.; Zhang, D. A Variable Prediction Horizon Self-tuning Method for Nonlinear Model Predictive Speed Control on PMSM Rotor Position System. IEEE Access 2021, 9, 78812–78822. [Google Scholar] [CrossRef]
- Yang, C.; Shi, W.; Chen, W. Comparison of unscented and extended Kalman filters with application in vehicle navigation. J. Navig. 2017, 70, 411–431. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F.; Zarri, L.; Bogado, B.; Prieto, I.G.; Arahal, M.R. Comparative study of predictive and resonant controllers in fault-tolerant five-phase induction motor drives. IEEE Trans. Ind. Electron. 2015, 63, 606–617. [Google Scholar] [CrossRef]
- Moon, C.; Kwon, Y.A. Sensorless speed control of a permanent magnet synchronous motor using an unscented Kalman filter with compensated covariances. J. Adv. Mar. Eng. Technol. 2020, 44, 42–47. [Google Scholar] [CrossRef]
- Lešić, V.; Vašak, M.; Stojičić, G.; Perić, N.; Joksimović, G.; Wolbank, T.M. State and parameter estimation for field-oriented control of induction machine based on unscented Kalman filter. In Proceedings of the International Symposium on Power Electronics Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 409–414. [Google Scholar]
- Sel, A.; Sel, B.; Kasnakoglu, C. GLSDC Based Parameter Estimation Algorithm for a PMSM Model. Energies 2021, 14, 611. [Google Scholar] [CrossRef]
- Xu, B.; Mu, F.; Shi, G.; Ji, W.; Zhu, H. State estimation of permanent magnet synchronous motor using improved square root UKF. Energies 2016, 9, 489. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, L.; Ji, W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives. IEEE Trans. Transp. Electrif. 2021, 7, 2753–2762. [Google Scholar] [CrossRef]
- Liu, L.; Ding, S.; Yu, X. Second-order sliding mode control design subject to an asymmetric output constraint. IEEE Trans. Circuits Syst. II Express Briefs 2020, 68, 1278–1282. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Techniques | Types | Benefits | Drawbacks |
|---|---|---|---|
| Direct calculation [4] | Fast, dynamic, and Simple | Parametric variation error | |
| Open Loop | Determination of stator inductance [5] | Zero speed estimation | Inaccurate at high stator current, valid for salient motors |
| Back EMF integration [7] | Fast, Robust, and accurate at high frequency | Difficult to calculate back EMF, not accurate at low speeds | |
| EKF [9] | Reduced computation time and noise rejection | Low speed, poor performance | |
| Closed Loop | MRAS [10] | Adaptation at high speed, machine model not required | Parametric sufferance |
| SMO [11] | Robust, parametric invariance and no steady state error | Stand still or zero speed performance is poor | |
| Low Frequency injection [12] | Applicable even for non-salient motors | Dynamic performance is poor, saturation problem | |
| Non-ideal property-based | High Frequency injection [13] | Coordinate transformation not required | Not applicable for higher inertia motor, slow dynamic response |
| INFORM [14] | Parameter invariance | Flux distortion and current ripples cause estimation error |
| Notation | Description | Notation | Description |
|---|---|---|---|
| Damping coefficient | Normalized trapezoidal function | ||
| RMS value of phase back EMF | Estimated speed and reference speed | ||
| Phase armature current and Phase Terminal Voltages | Updated currents and Estimated position | ||
| Direct-axis and Quadrature-axis currents | Synchronous rotating frame stator voltage | ||
| Direct axis and Quadrature axis voltages | State space vectors | ||
| Neutral voltage | Synchronous rotating frame stator current vector | ||
| Current and voltage constraints | Current predictive error and Current predictive vector value | ||
| Inertia of the rotor and number of poles | Correction factor and Sigma point matrix | ||
| Phase self-inductance and Mutual Inductance | Scaling parameter and Covariance matrix | ||
| d-axis and q-axis magnetizing inductances | Spread of sigma points around the mean | ||
| Phase resistance and Sampling Time | k | Secondary scaling parameter | |
| Motor electromagnetic and loading torques | Weights for mean and covariance | ||
| Rotor position angle or position | Predicted mean and predicted covariance | ||
| Amplitude of stator permanent magnet flux linkage | Transformed sigma points in measurement space | ||
| Electrical velocity and Permeability in air gap | Mean in measurement space | ||
| Error and control weighting coefficient matrics | Jacobian of the matrix and Kalman gain | ||
| Covariance matrices for process and measurement noises | Predicted covariance matrix | ||
| Process noise vector and Measurement noise vector | Cross-correlation matrix between actual and predicted spaces | ||
| Maximum rotor current | Function that maps our sigma points to measurement space | ||
| Torque constant and Back EMF constant | Covariance in measurement space |
| Symbol | Description | Value |
|---|---|---|
| amplitude of flux linkages | Wb | |
| viscous friction coefficient | Nms/rad | |
| col2 text | col3 text | |
| direct axis inductance | H | |
| quadrature axis inductance | H | |
| number of poles | 4 | |
| resistance of the stator | 5 | |
| sampling time | s | |
| J | moment of inertia | kg cm2 |
| Dynamic Property | MPC-UKF | MPC-EKF | MPC-SMO | Percentage Improvement for UKF |
|---|---|---|---|---|
| Step 1 (0–25% of rated speed) | ||||
| Speed peak time | 0.75 ms | 1.07 ms | 1.59 ms | 29.90% |
| Speed settling time | 0.97 ms | 1.15 ms | 3.50 ms | 15.65% |
| Speed overshoot | 1.26% | 1.78% | 24.9% | 29.21% |
| Step 2 (25–50% of rated speed) | ||||
| Speed peak time | 0.68 ms | 1 ms | 1.48 ms | 32% |
| Speed settling time | 0.67 ms | 0.87 ms | 3.06 ms | 22.98% |
| Speed overshoot | 0.92% | 1.43% | 19.6% | 35.66% |
| Step 3 (50–75% of rated speed) | ||||
| Speed peak time | 0.65 ms | 0.91 ms | 2.05 ms | 28.57% |
| Speed settling time | 0.34 ms | 0.52 ms | 2.59 ms | 34.61% |
| Speed overshoot | 0.56% | 0.99% | 15.4% | 43.43% |
| Step 4 (75–100% of rated speed) | ||||
| Speed peak time | 0.42 ms | 0.61 ms | 2.60 ms | 31.14% |
| Speed settling time | 0.26 ms | 0.35 ms | 2.36 ms | 25.71% |
| Speed overshoot | 0.29% | 0.78% | 11.56% | 62.82% |
| Step 5 (40% of rated speed) | ||||
| Speed peak time | 1.21 ms | 1.36 ms | 4.89 ms | 11.03% |
| Speed settling time | 0.97 ms | 1.15 ms | 3.50 ms | 15.65% |
| Speed overshoot | 1.26% | 1.78% | 24.9% | 29.21% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahzad, K.; Jawad, M.; Ali, K.; Akhtar, J.; Khosa, I.; Bajaj, M.; Elattar, E.E.; Kamel, S. A Hybrid Approach for an Efficient Estimation and Control of Permanent Magnet Synchronous Motor with Fast Dynamics and Practically Unavailable Measurements. Appl. Sci. 2022, 12, 4958. https://doi.org/10.3390/app12104958
Shahzad K, Jawad M, Ali K, Akhtar J, Khosa I, Bajaj M, Elattar EE, Kamel S. A Hybrid Approach for an Efficient Estimation and Control of Permanent Magnet Synchronous Motor with Fast Dynamics and Practically Unavailable Measurements. Applied Sciences. 2022; 12(10):4958. https://doi.org/10.3390/app12104958
Chicago/Turabian StyleShahzad, Kashif, Muhammad Jawad, Khurram Ali, Jahanzeb Akhtar, Ikramullah Khosa, Mohit Bajaj, Ehab E. Elattar, and Salah Kamel. 2022. "A Hybrid Approach for an Efficient Estimation and Control of Permanent Magnet Synchronous Motor with Fast Dynamics and Practically Unavailable Measurements" Applied Sciences 12, no. 10: 4958. https://doi.org/10.3390/app12104958
APA StyleShahzad, K., Jawad, M., Ali, K., Akhtar, J., Khosa, I., Bajaj, M., Elattar, E. E., & Kamel, S. (2022). A Hybrid Approach for an Efficient Estimation and Control of Permanent Magnet Synchronous Motor with Fast Dynamics and Practically Unavailable Measurements. Applied Sciences, 12(10), 4958. https://doi.org/10.3390/app12104958