
Railway Vehicle Wheel Flat Detection with Multiple Records Using Spectral Kurtosis Analysis





Abstract
1. Introduction
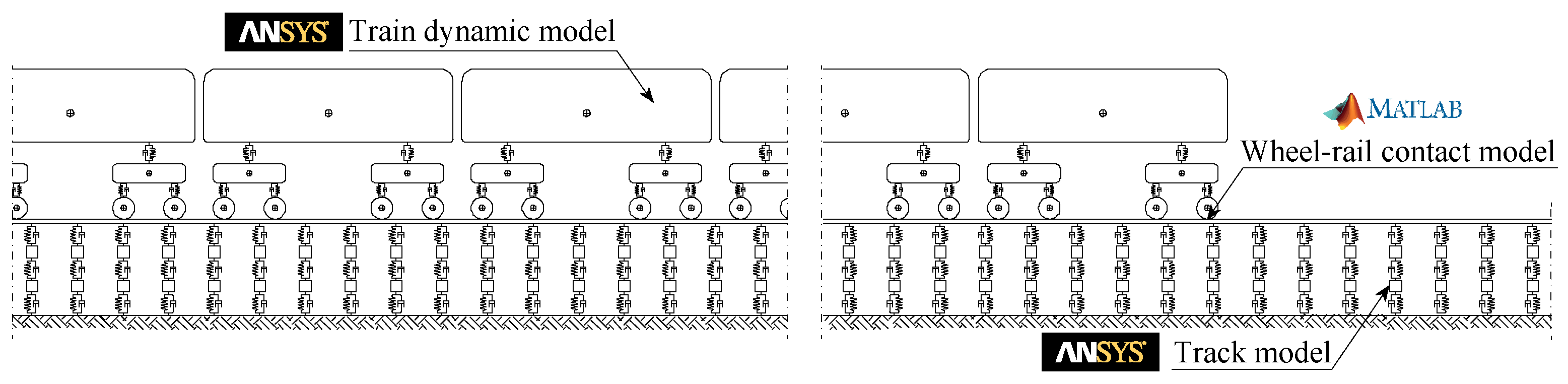
2. Train-Track Dynamic Interaction Modeling
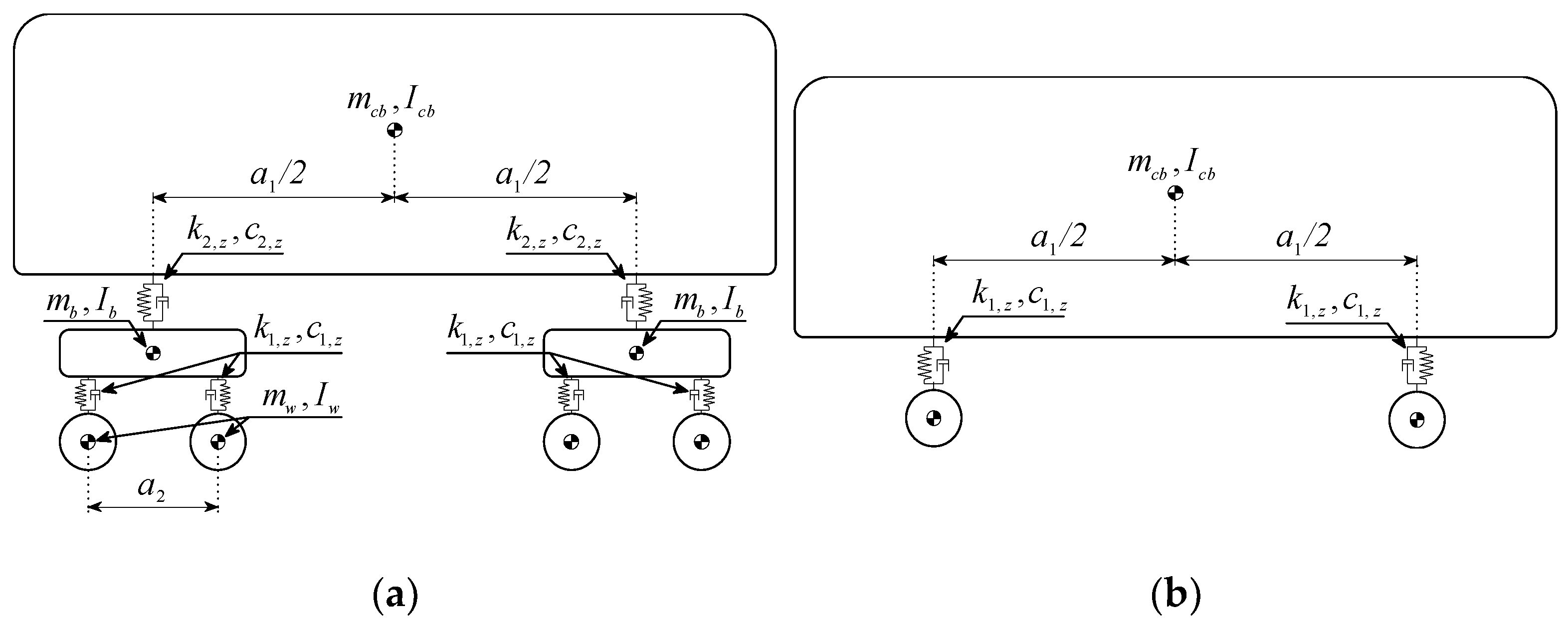
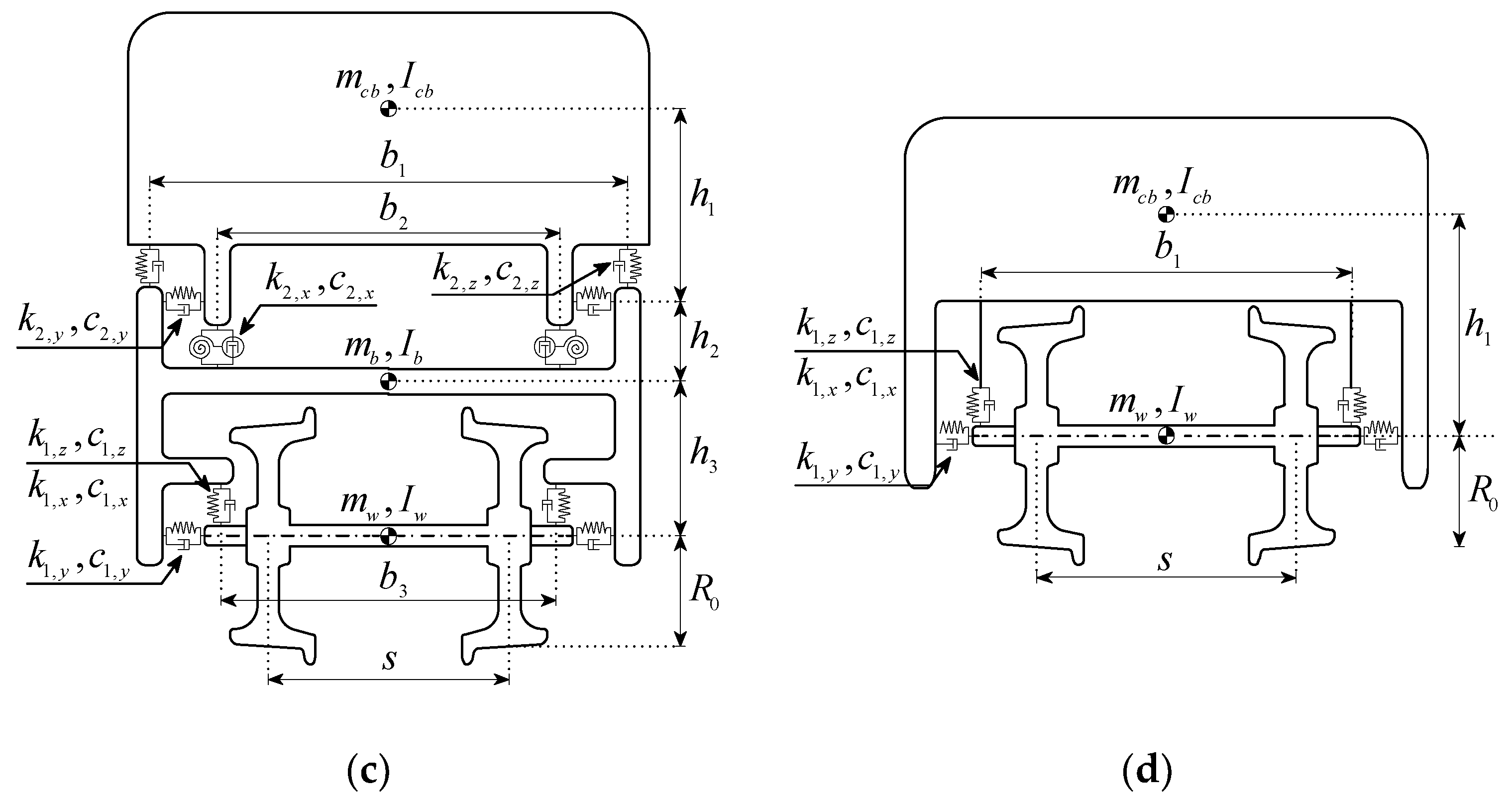
2.1. Numerical Modeling for Alfa Pendular Vehicle and Freight Wagon
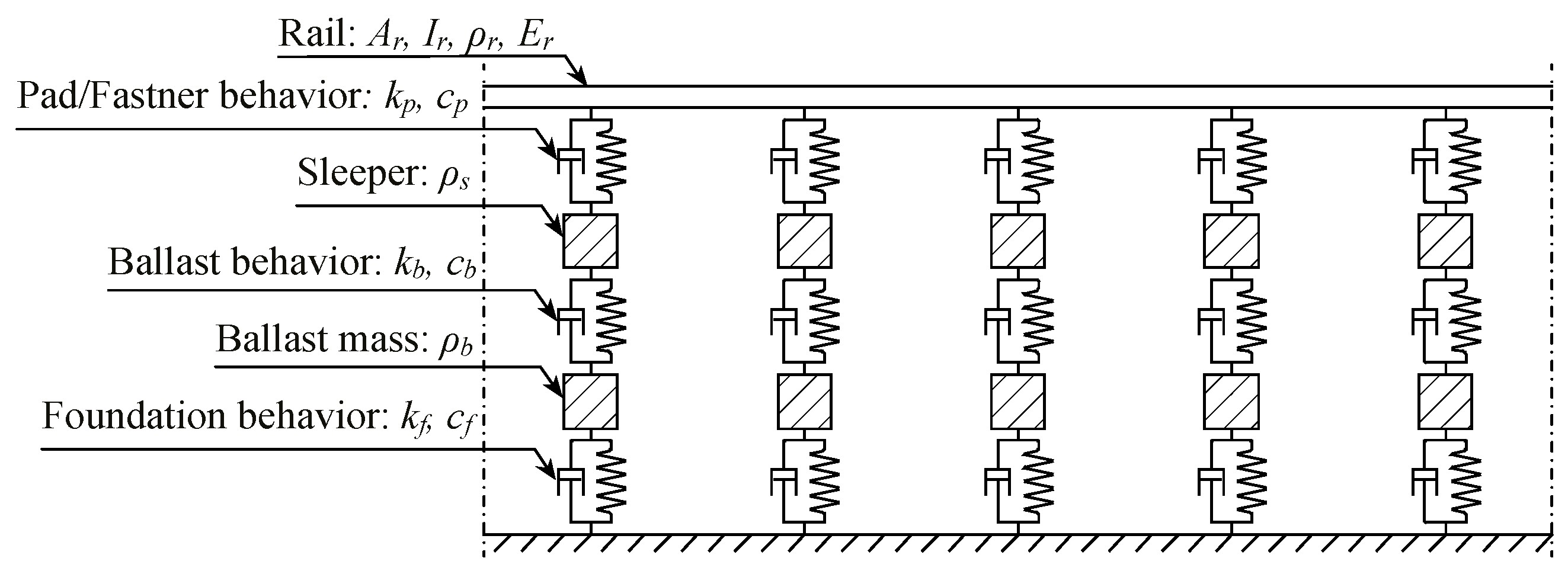
2.2. Railway Track
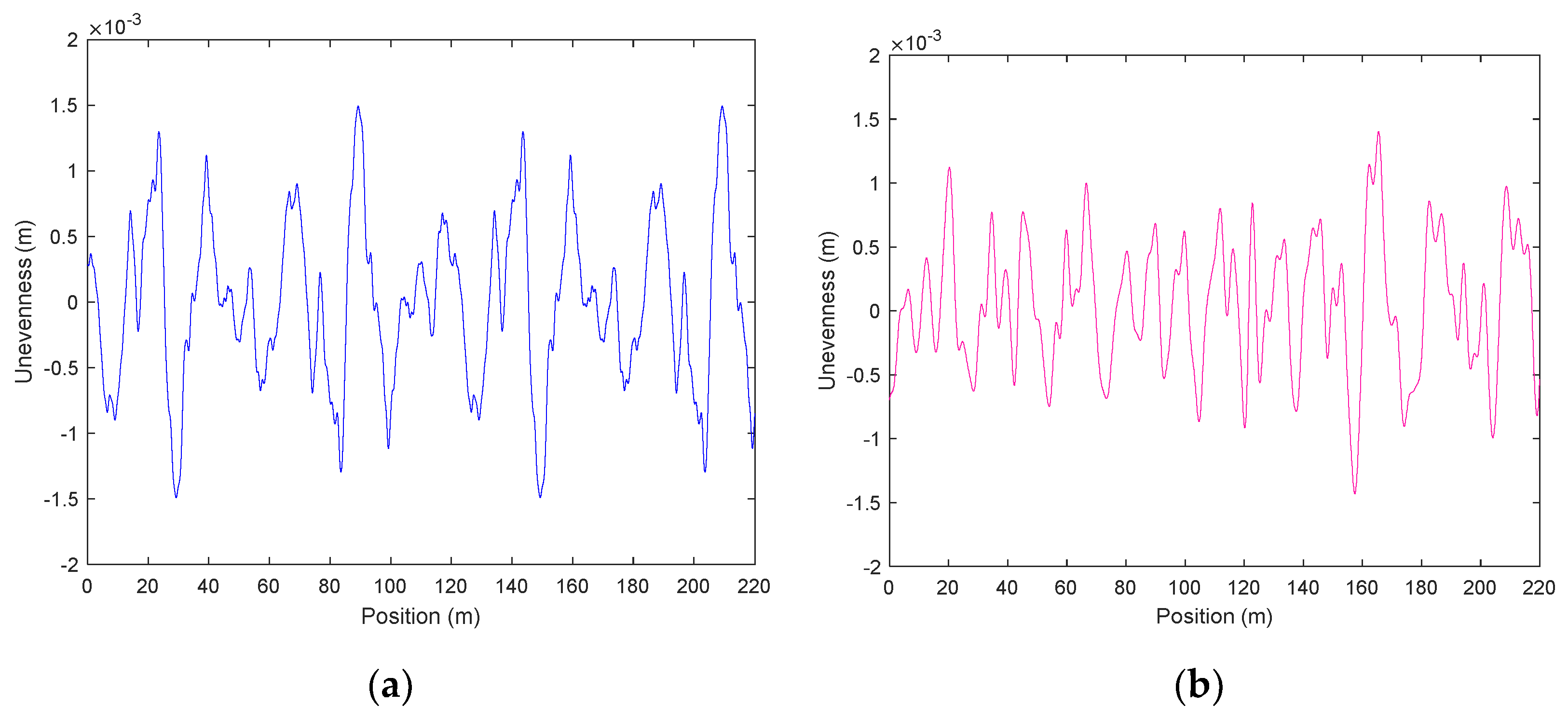
2.3. Train-Track Interaction
2.4. System Description
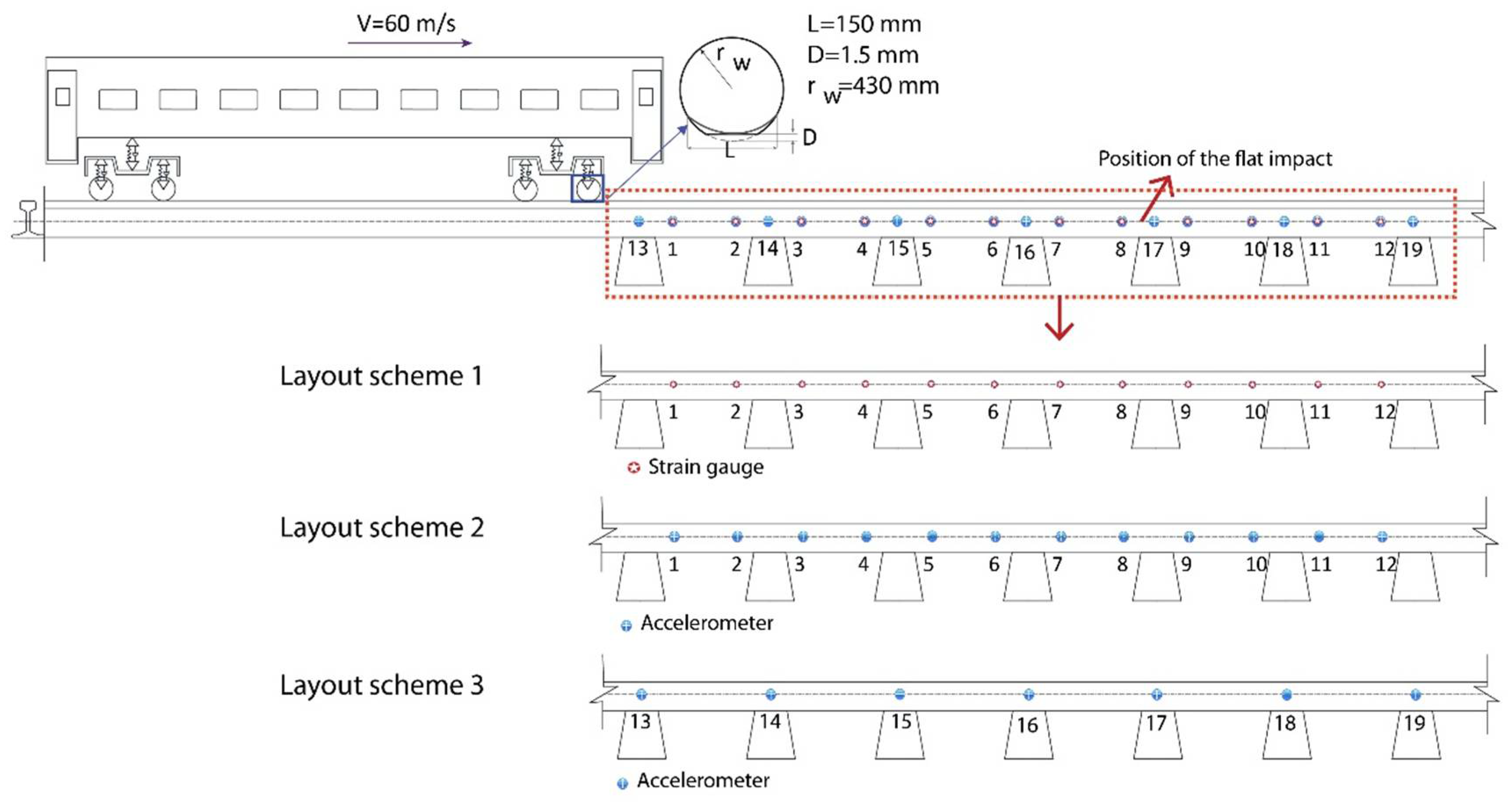
2.4.1. Layout Scheme of Multisensor Arrays
2.4.2. Flat Geometry
3. Methodology for Flat Detection
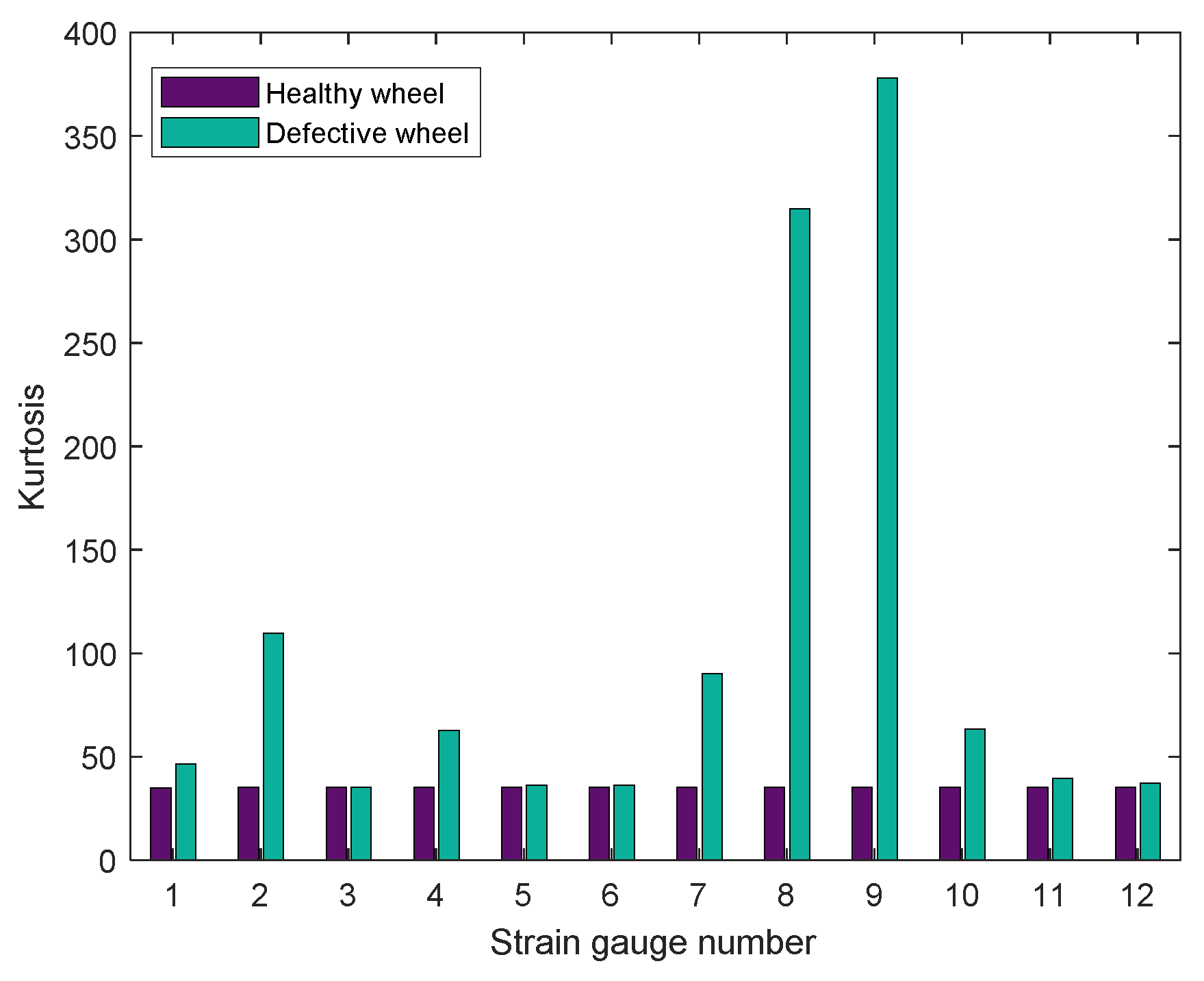
3.1. Definition of Kurtosis
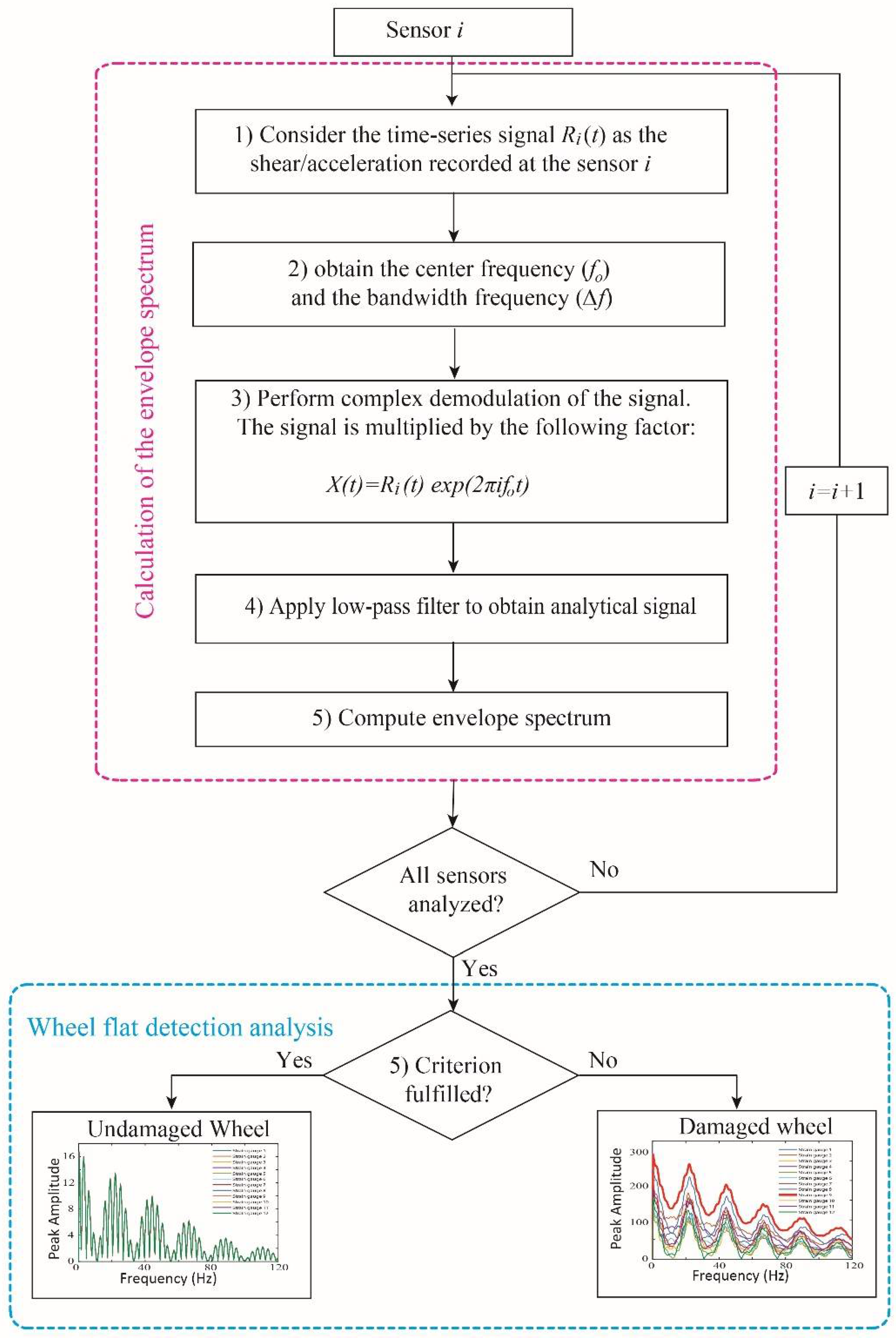
3.2. Envelope Spectrum Approach to Detect a Wheel with Spectral Kurtosis Analysis
- Time-series signal R(t) is considered, as the response recorded (shear or acceleration) in positions 1 to 19 (presented in Figure 5).
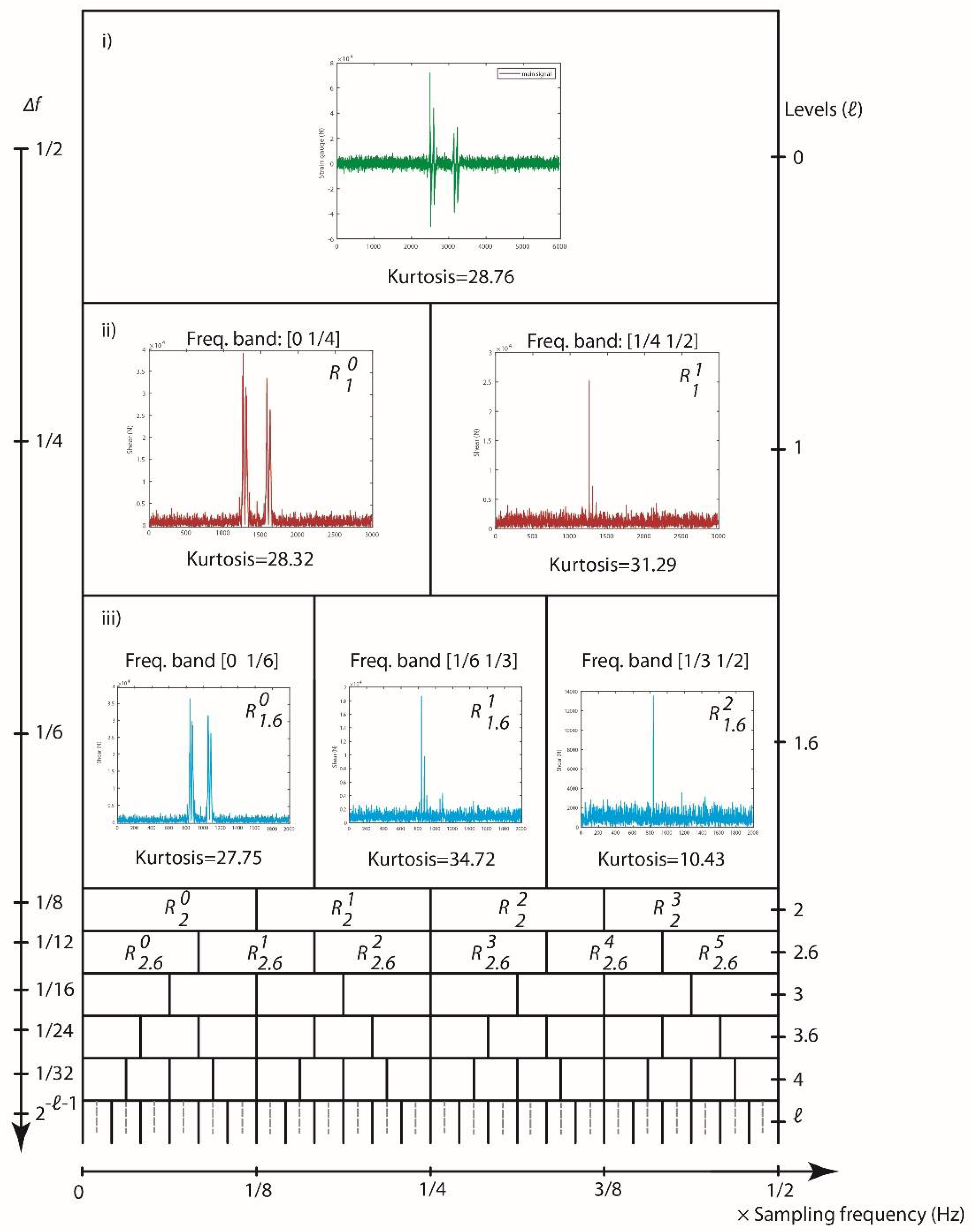
- Consider h as a low-pass prototype filter. Then construct two low-pass and high-pass analysis filters and , from h, in the frequency bands [0 ] and [ ] of the sampling frequency, respectively, as follow:
- 3.
- The idea of this step is to define three additional bandpass filters with frequency bands [0 ], [] and [] of the sampling frequency, as follow:
- 4.
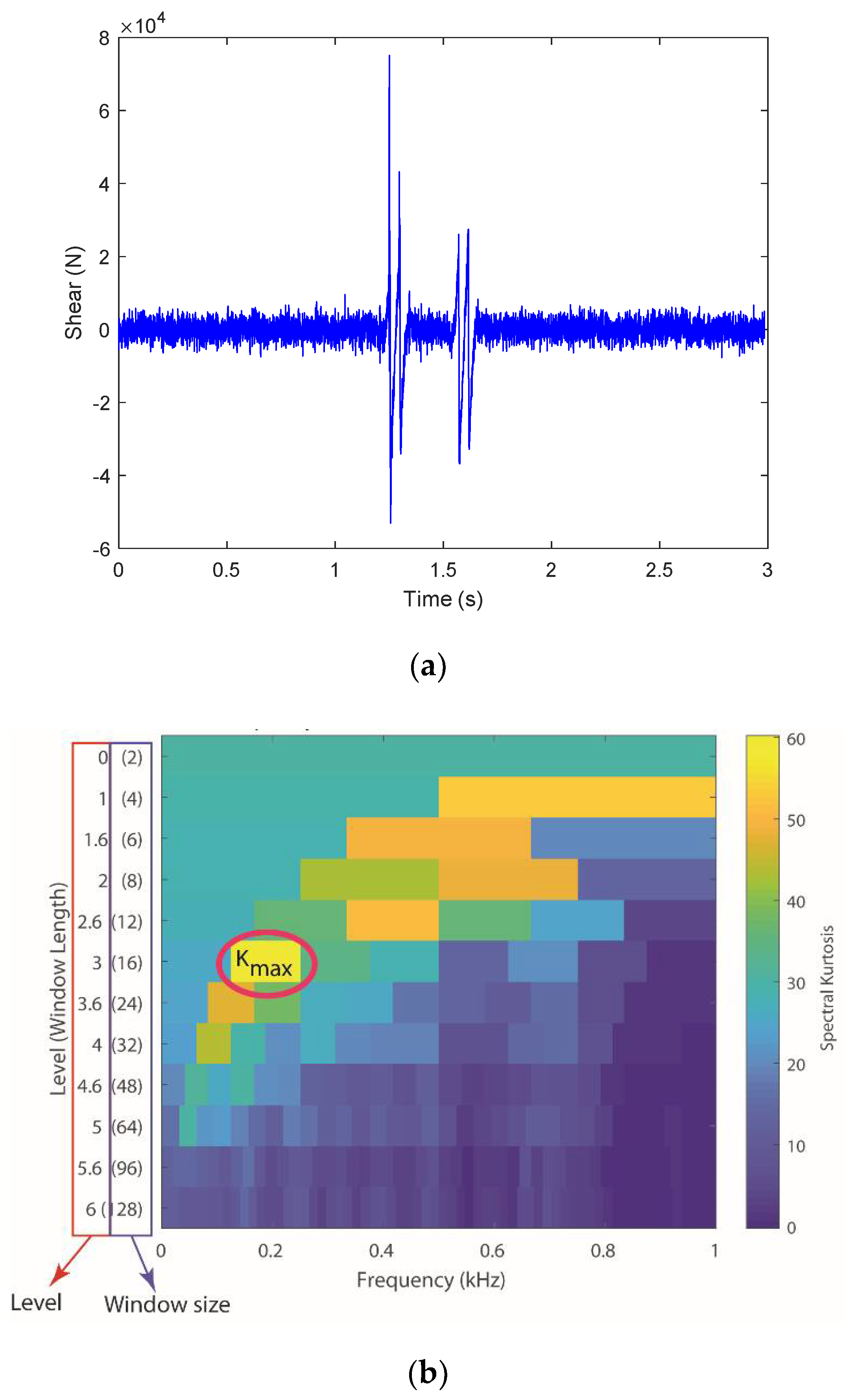
- After filtering with the above low-pass and bandpass filters, each signal obtained from section (ii) is taken into account as the main signal () and this process is iterated from down to level . The kurtogram would finally be estimated by computing the kurtosis for all sequence signals. The framework to obtain the kurtogram is depicted in Figure 7. Moreover, the center frequency and bandwidth frequency for the level with the highest kurtosis can be obtained by the following equations [60,61]:where is the bandwidth, is the sampling frequency, and is the center frequency.
4. Sensitivity of Layout Schemes to the Unevenness Profile of the Rail and the Different Types of Trains
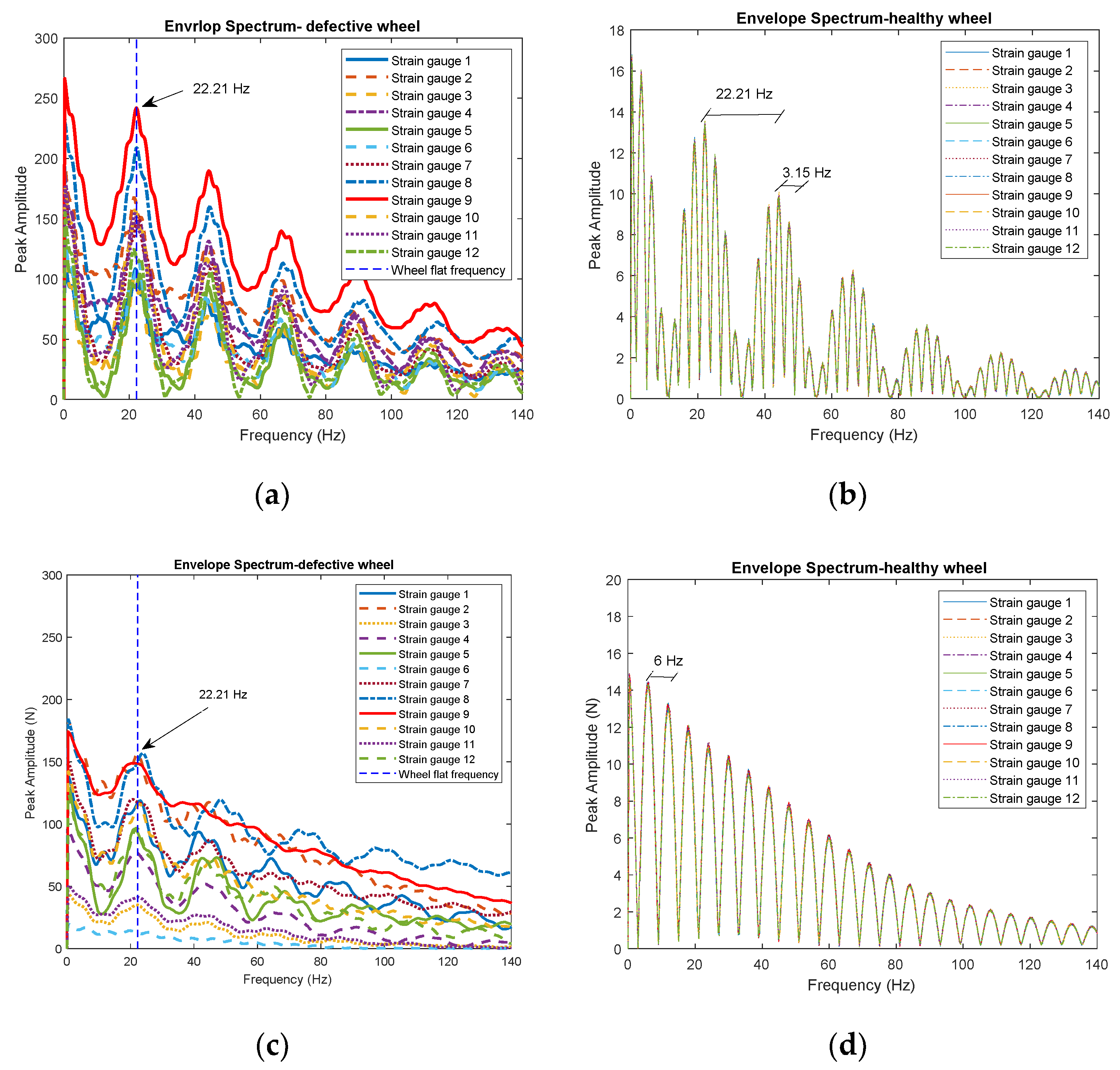
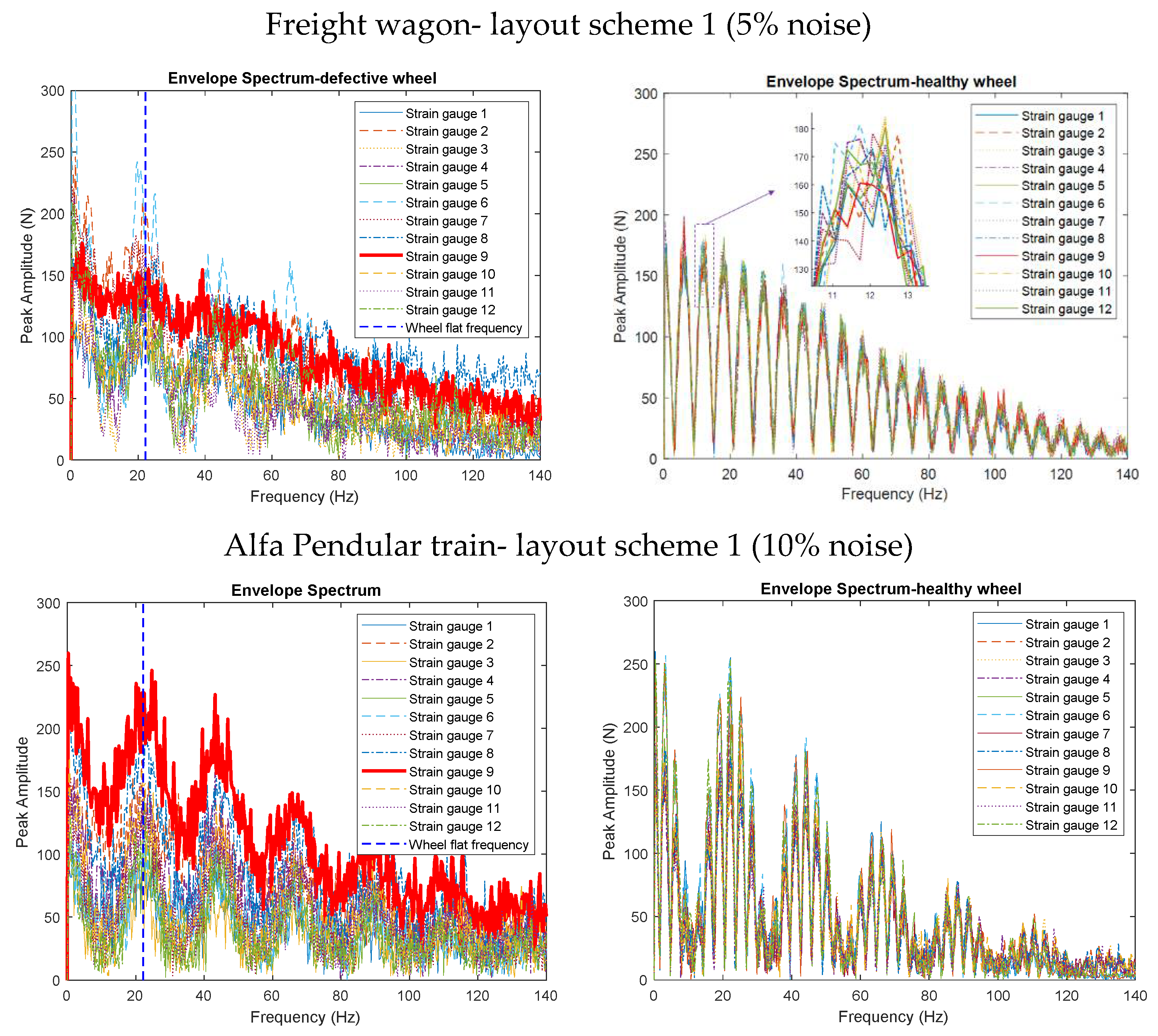
4.1. Track Response Obtained by the Strain Gauge Setup
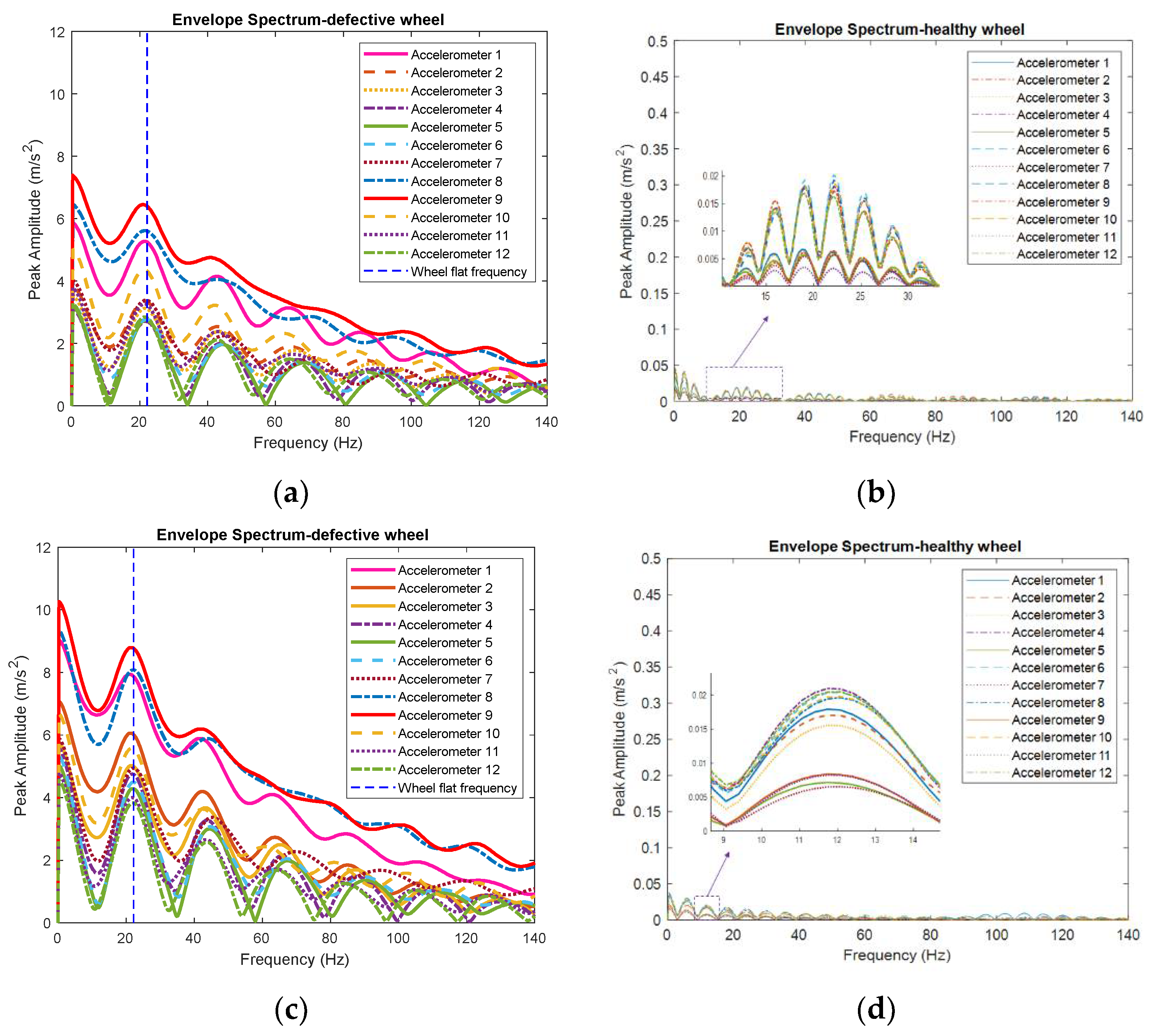
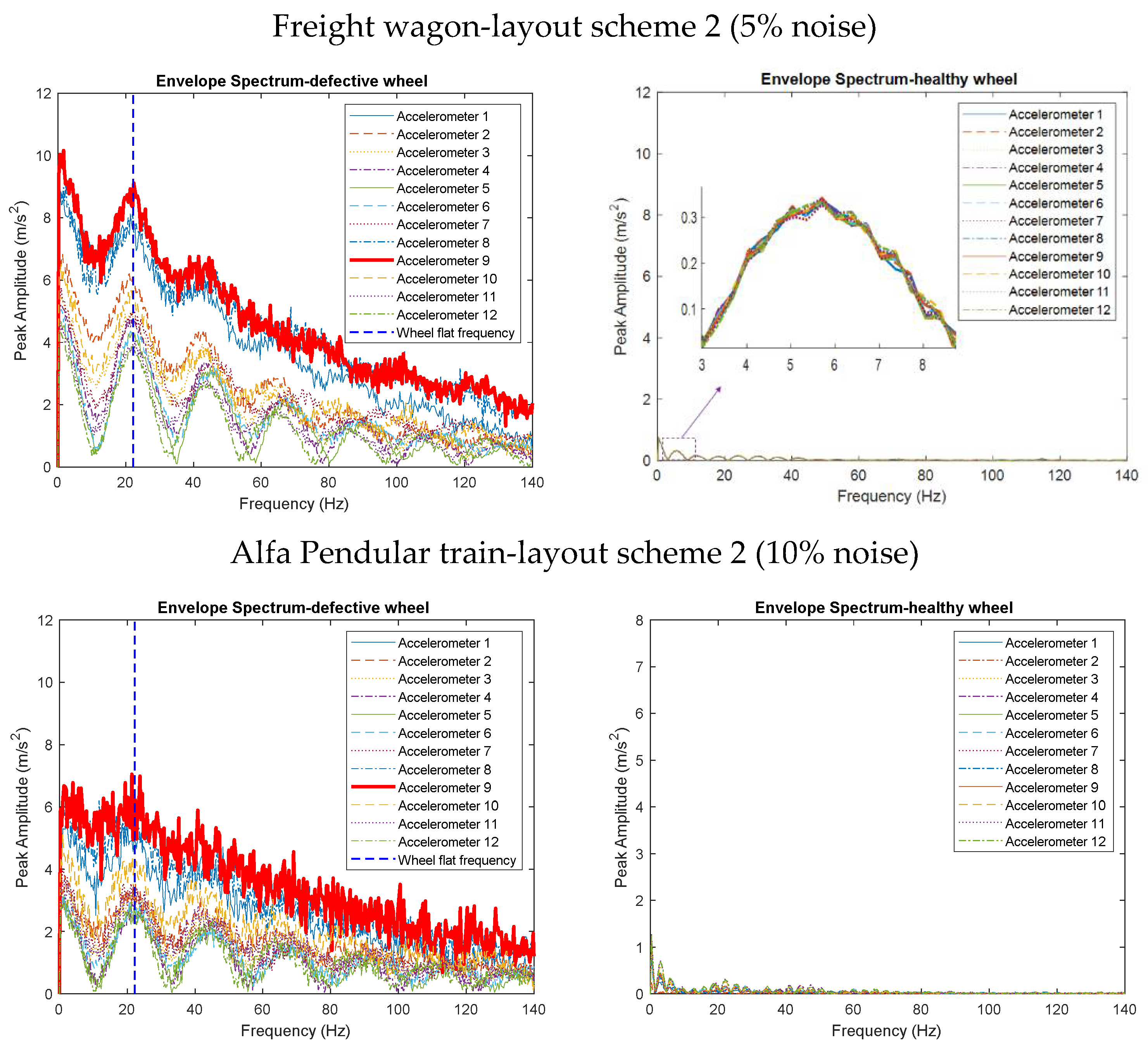
4.2. Track Response Obtained by the Accelerometers
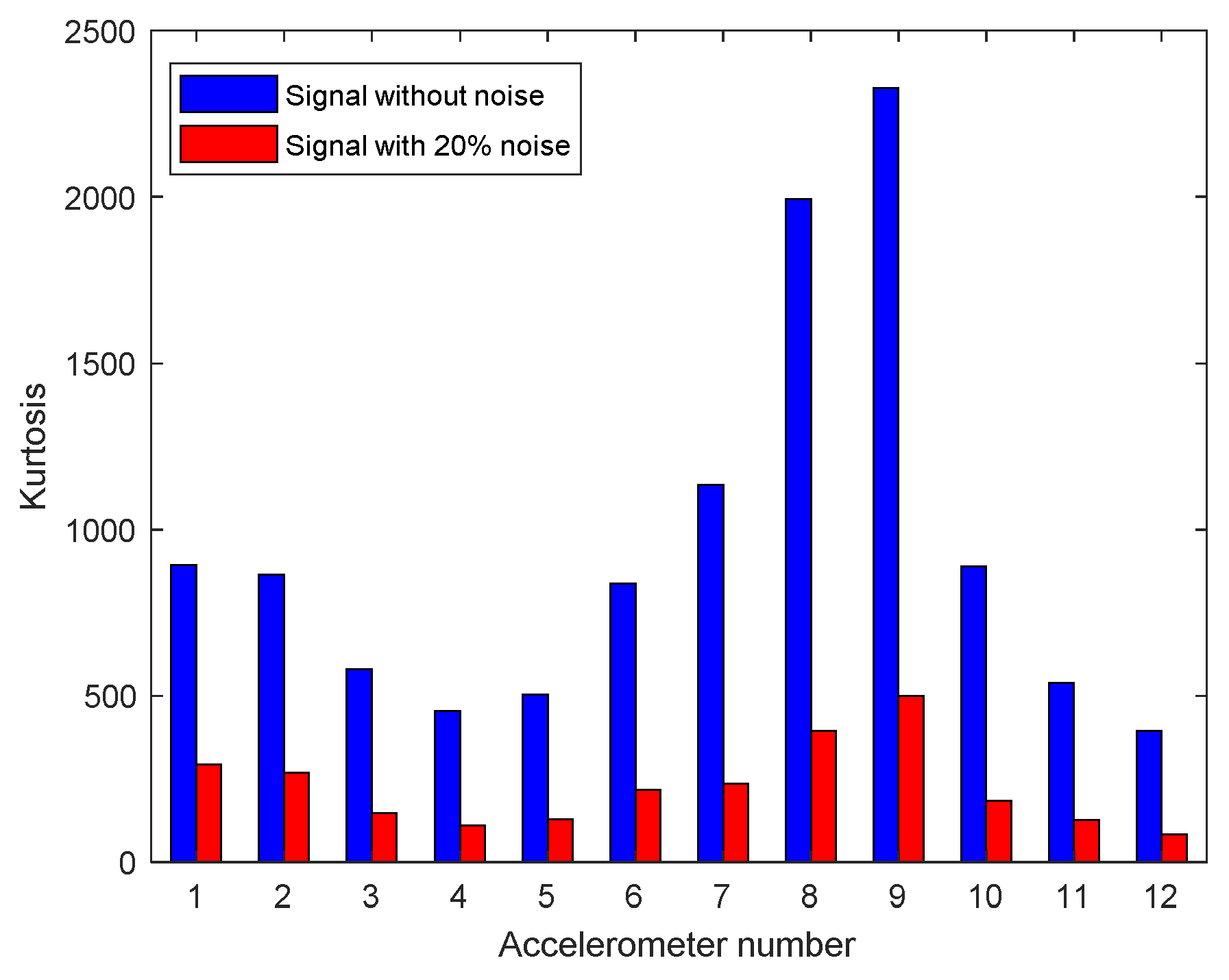
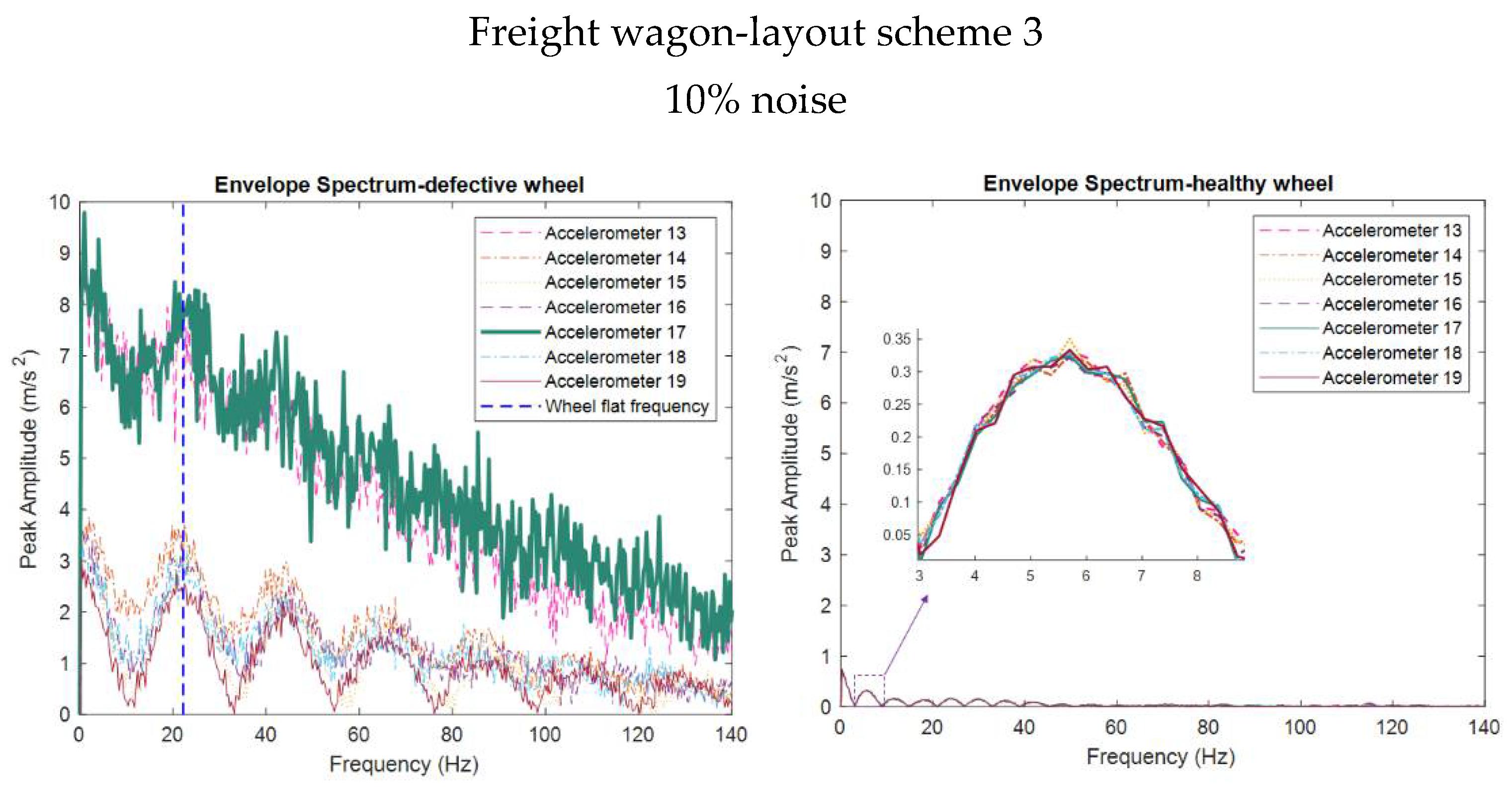
5. Sensitivity of the Layout Schemes to the Signal Noise
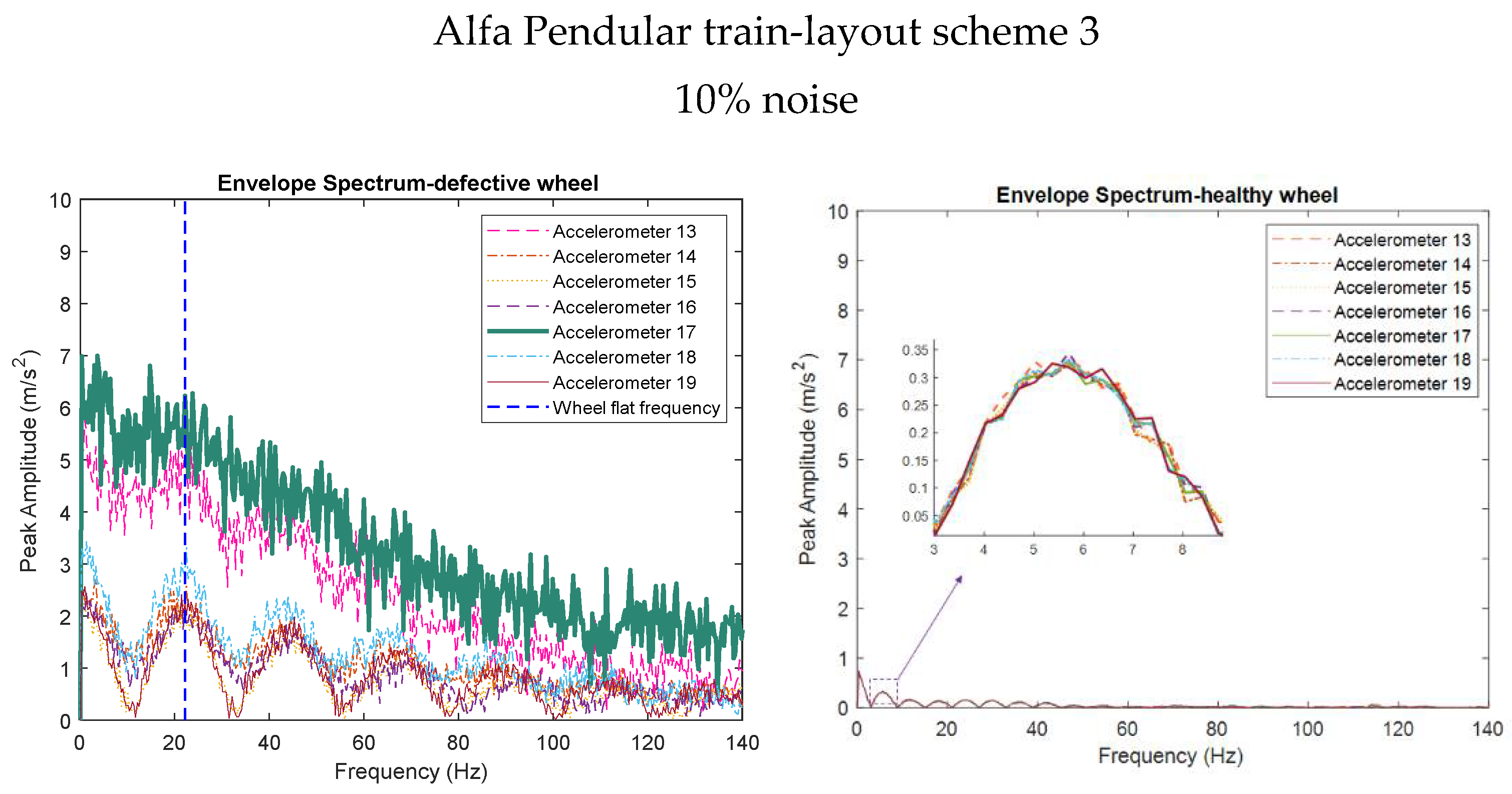
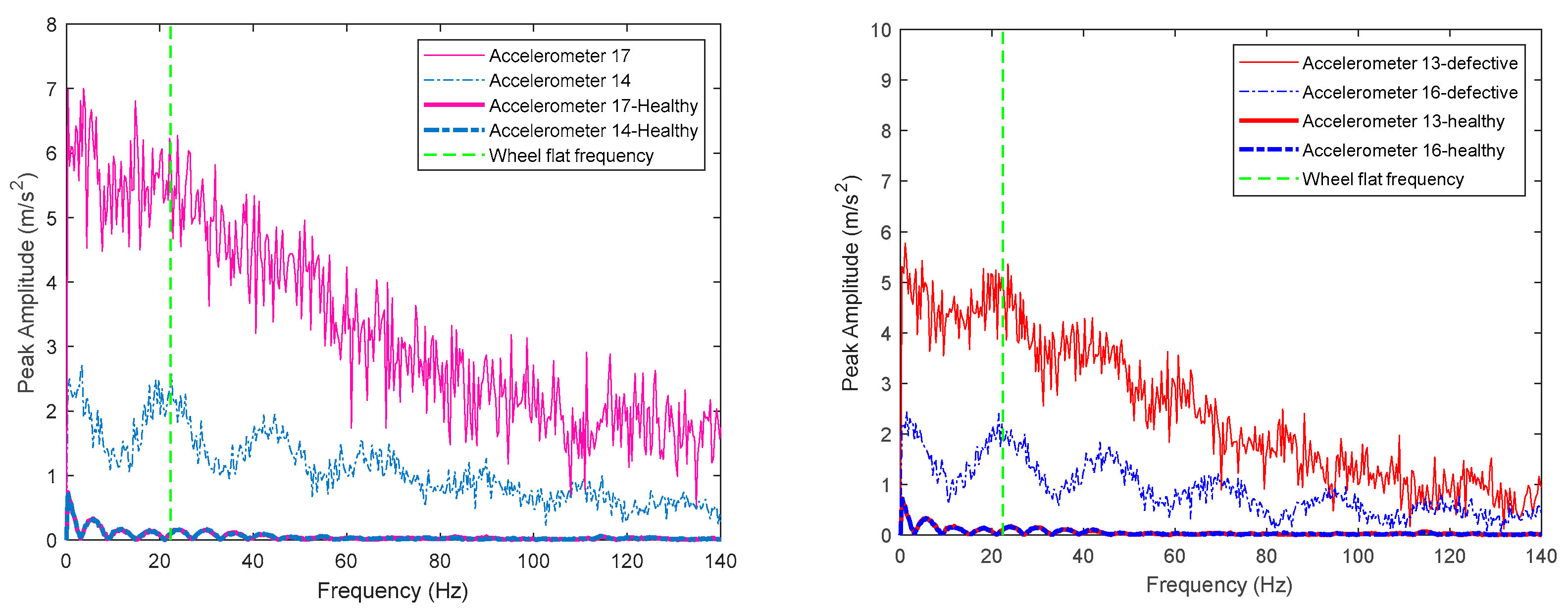
6. Sensitivity of the Layout Schemes to the Number and Location of the Accelerometers
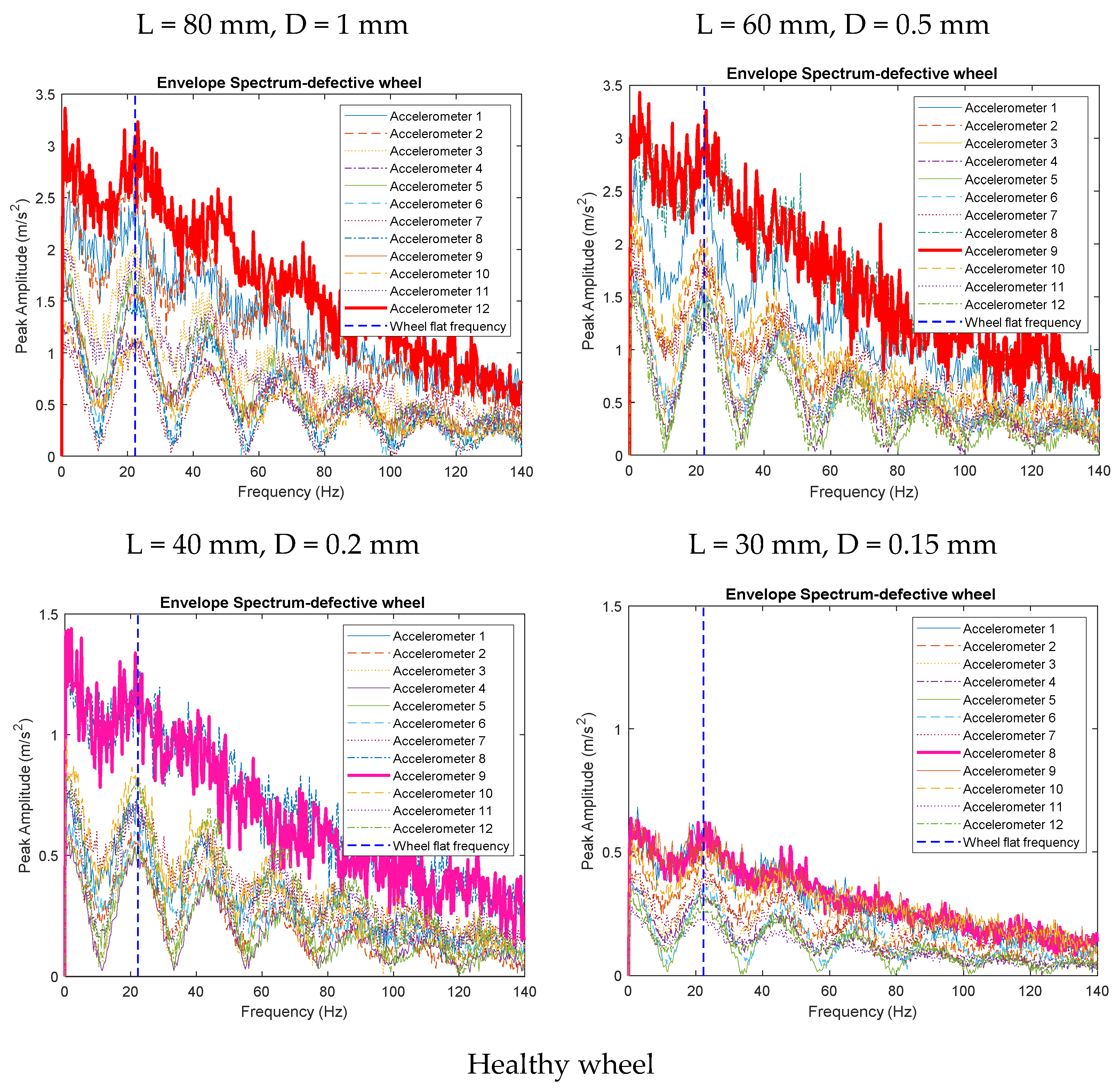
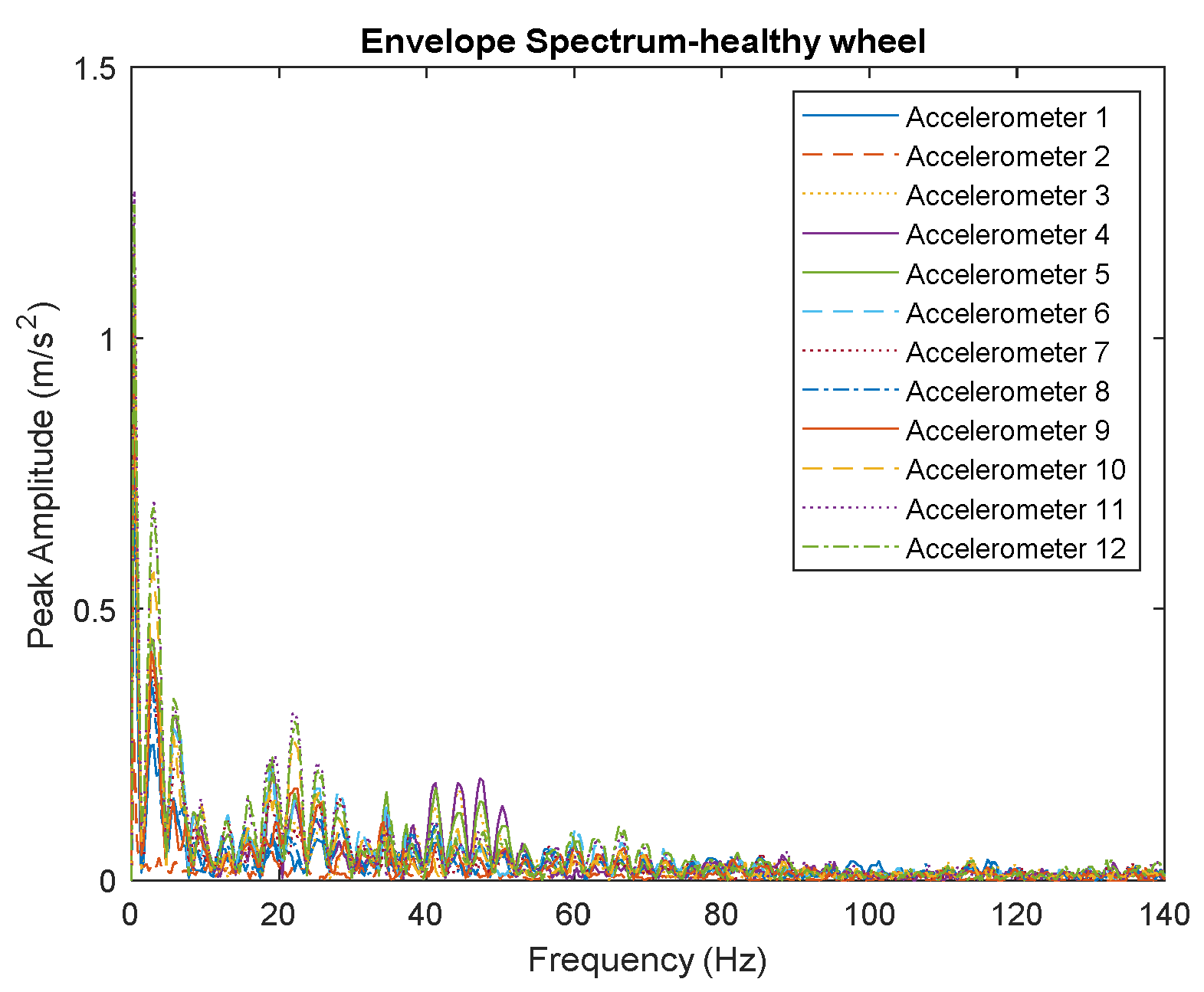
7. Sensitivity of the Layout Schemes to the Severity of the Flat
8. Conclusions
- The methodology proposed in this work to detect wheel flats and distinguish defective from healthy wheels is based on the envelope spectrum analysis. In this regard, extracting the impulsive signal with amplitude modulation proved a critical preprocessing step before performing the envelope spectrum. In this study, the center frequency and the bandwidth frequency of the signal were obtained first, and then this information was used as input to detect defective wheels through the envelope spectrum approach.
- In situations where the signal is significantly contaminated by noise, the use of a layout scheme composed of accelerometers is clearly more advantageous than using the strain gauges to perform an envelope spectrum to detect defective wheels. When the envelope spectrum is performed with the acceleration as input, there are significant differences in the amplitudes of the envelope spectrum response obtained in a scenario with healthy wheels and in a scenario with a defective one.
- This finding confirms the importance of kurtosis to obtain the center frequency because the impulse signal obtained with the accelerometer is more obvious than that obtained with the strain gauge. Moreover, in noised contaminated signals, the impulse signal is even more visible due to the defective wheel, and with kurtosis, the center frequency and bandwidth would be obtained more accurately.
- To detect a defective wheel, there is no need to install 12 strain gauges or accelerometers along the perimeter of a wheel since, according to the results obtained in this work, it is clear that the same results are achieved with only two accelerometers on the rail web.
- The results show that the system, regardless of the position of the sensors and the severity of the flat, is always effective in detecting wheel flats, which is a major advantage regarding the installing process.
Author Contributions
Funding
Conflicts of Interest
References
- Nielsen, J.C.O.; Johansson, A. Out-of-round railway wheels-a literature survey. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2000, 214, 79–91. [Google Scholar] [CrossRef]
- Barke, D.W.; Chiu, W.K. A Review of the Effects of Out-Of-Round Wheels on Track and Vehicle Components. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2005, 219, 151–175. [Google Scholar] [CrossRef]
- Johansson, A.; Andersson, C. Out-of-round railway wheels—A study of wheel polygonalization through simulation of three-dimensional wheel–rail interaction and wear. Veh. Syst. Dyn. 2005, 43, 539–559. [Google Scholar] [CrossRef]
- Nielsen, J. Out-of-Round Railway Wheels; Chalmers University of Technology: Göteborg, Sweden, 2009. [Google Scholar]
- Fesharakifard, R.; Dequidt, A.; Tison, T.; Coste, O. Dynamics of railway track subjected to distributed and local out-of-round wheels. Mech. Ind. 2013, 14, 347–359. [Google Scholar] [CrossRef]
- Lan, Q.; Dhanasekar, M.; Handoko, Y.A. Wear damage of out-of-round wheels in rail wagons under braking. Eng. Fail. Anal. 2019, 102, 170–186. [Google Scholar] [CrossRef]
- Dukkipati, R.V.; Dong, R. Impact Loads due to Wheel Flats and Shells. Veh. Syst. Dyn. 1999, 31, 1–22. [Google Scholar] [CrossRef]
- Wu, T.; Thompson, D. A hybrid model for the noise generation due to railway wheel flats. J. Sound Vib. 2002, 251, 115–139. [Google Scholar] [CrossRef]
- Uzzal, R.U.A.; Ahmed, W.; Rakheja, S. Dynamic analysis of railway vehicle-track interactions due to wheel flat with a pitch-plane vehicle model. J. Mech. Eng. 2008, 39, 86–94. [Google Scholar] [CrossRef]
- Vale, C. Influência da Qualidade dos Sistemas Ferroviários no Comportamento Dinâmico e no Planeamento da Manutenção Preventiva de Vias de Alta Velocidade. Ph.D. Thesis, Faculty of Engineering of the University of Porto, Porto, Portugal, 2010. (In Portuguese). [Google Scholar]
- Li, Y.; Liu, J.; Wang, Y. Railway Wheel Flat Detection Based on Improved Empirical Mode Decomposition. Shock. Vib. 2016, 2016, 1–14. [Google Scholar] [CrossRef]
- Alemi, A.; Corman, F.; Pang, Y.; Lodewijks, G. Reconstruction of an informative railway wheel defect signal from wheel–rail contact signals measured by multiple wayside sensors. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 233, 49–62. [Google Scholar] [CrossRef]
- Palo, M. Condition Monitoring of Railway Vehicles, A Study on Wheel Condition for Heavy Haul Rolling Stock; Operation and Maintenance Engineering Luleå University of Technology: Luleå, Sweden, 2012. [Google Scholar]
- Baasch, B.; Heusel, J.; Roth, M.; Neumann, T. Train Wheel Condition Monitoring via Cepstral Analysis of Axle Box Accelerations. Appl. Sci. 2021, 11, 1432. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Z.; Liu, Z.; Wang, R. A spatial coupling model to study dynamic performance of pantograph-catenary with vehicle-track excitation. Mech. Syst. Signal Process. 2021, 151, 107336. [Google Scholar] [CrossRef]
- Luo, R. Anti-sliding control simulation of railway vehicle braking. Chin. J. Mech. Eng. 2008, 44, 35–40. [Google Scholar] [CrossRef]
- Bosso, N.; Gugliotta, A.; Zampieri, N. Wheel flat detection algorithm for onboard diagnostic. Measurement 2018, 123, 193–202. [Google Scholar] [CrossRef]
- Cavuto, A.; Martarelli, M.; Pandarese, G.; Revel, G.; Tomasini, E.P. Train wheel diagnostics by laser ultrasonics. Measurement 2016, 80, 99–107. [Google Scholar] [CrossRef]
- Amini, A.; Entezami, M.; Papaelias, M. Onboard detection of railway axle bearing defects using envelope analysis of high frequency acoustic emission signals. Case Stud. Nondestruct. Test. Eval. 2016, 6, 8–16. [Google Scholar] [CrossRef]
- Zhang, Z.; Entezami, M.; Stewart, E.; Roberts, C. Enhanced fault diagnosis of roller bearing elements using a combination of empirical mode decomposition and minimum entropy deconvolution. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 231, 655–671. [Google Scholar] [CrossRef]
- Meixedo, A.; Goncalves, A.; Calcada, R.; Gabriel, J.; Fonseca, H.; Martins, R. Weighing in motion and wheel defect detection of rolling stock. In Proceedings of the 2015 3rd Experiment International Conference (exp.at’15), Ponta Delgada, Portugal, 2–4 June 2015. [Google Scholar]
- Amini, A.; Entezami, M.; Huang, Z.; Rowshandel, H.; Papaelias, M. Wayside detection of faults in railway axle bearings using time spectral kurtosis analysis on high-frequency acoustic emission signals. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef]
- Colaço, A.; Costa, P.A.; Connolly, D.P. The influence of train properties on railway ground vibrations. Struct. Infrastruct. Eng. 2016, 12, 517–534. [Google Scholar] [CrossRef]
- Mosleh, A.; Meixedo, A.; Costa, P.; Calçada, R. Trackside Monitoring Solution for Weighing in Motion of Rolling Stock. In Proceedings of the TESTE2019—2nd Conference on Testing and Experimentations in Civil Engineering—Proceedings, Porto, Portugal, 19–21 February 2019. [Google Scholar] [CrossRef]
- Mosleh, A.; Costa, P.A.; Calçada, R. A new strategy to estimate static loads for the dynamic weighing in motion of railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 234, 183–200. [Google Scholar] [CrossRef]
- Kouroussis, G.; Kinet, D.; Moeyaert, V.; Dupuy, J.; Caucheteur, C. Railway structure monitoring solutions using fibre Bragg grating sensors. Int. J. Rail Transp. 2016, 4, 135–150. [Google Scholar] [CrossRef]
- Alexandrou, G.; Kouroussis, G.; Verlinden, O. A comprehensive prediction model for vehicle/track/soil dynamic response due to wheel flats. J. Rail Rapid Transit 2016, 230, 1088–1104. [Google Scholar] [CrossRef]
- Mosleh, A.; Costa, P.; Calçada, R. Development of a Low-Cost Trackside System for Weighing in Motion and Wheel Defects Detection. Int. J. Railw. Res. 2020, 7, 1–9. [Google Scholar]
- Stratman, B.; Yongming, L.; Sankaran, M. Structural Health Monitoring of Railroad Wheels Using Wheel Impact Load Detectors. J. Fail. Anal. Preven. 2007, 7, 218–225. [Google Scholar] [CrossRef]
- Liu, X.; Ni, Y. Wheel tread defect detection for high-speed trains using FBG-based online monitoring techniques. Smart Struct. Syst. 2018, 21, 687–694. [Google Scholar]
- Gao, R.; He, Q.; Feng, Q. Railway Wheel Flat Detection System Based on a Parallelogram Mechanism. Sensors 2019, 19, 3614. [Google Scholar] [CrossRef]
- Liang, M.; Bozchalooi, I.S. An energy operator approach to joint application of amplitude and frequency-demodulations for bearing fault detection. Mech. Syst. Signal Process. 2010, 24, 1473–1494. [Google Scholar] [CrossRef]
- Zhou, C.; Gao, L.; Xiao, H.; Hou, B. Railway Wheel Flat Recognition and Precise Positioning Method Based on Multisensor Arrays. Appl. Sci. 2020, 10, 1297. [Google Scholar] [CrossRef]
- Merainani, B.; Benazzouz, D.; Rahmoune, C. Early detection of tooth crack damage in gearbox using empirical wavelet transform combined by Hilbert transform. J. Vib. Control. 2017, 23, 1623–1634. [Google Scholar] [CrossRef]
- Lv, Y.; Ge, M.; Zhang, Y.; Yi, C.; Ma, Y. A Novel Demodulation Analysis Technique for Bearing Fault Diagnosis via Energy Separation and Local Low-Rank Matrix Approximation. Sensors 2019, 19, 3755. [Google Scholar] [CrossRef]
- Meixedo, A.; Goncalves, A.; Calcada, R.; Gabriel, J.; Fonseca, H.; Martins, R. On-line monitoring system for tracks. In Proceedings of the 3rd Experiment International Conference: Online Experimentation, Ponta Delgada, Portugal, 2–4 June 2015. [Google Scholar]
- Mosleh, A.; Montenegro, P.; Costa, P.A.; Calçada, R. An approach for wheel flat detection of railway train wheels using envelope spectrum analysis. Struct. Infrastruct. Eng. 2020, 1–20. [Google Scholar] [CrossRef]
- ANSYS®. Academic Research, Release 19.2; ANSYS Inc.: Canonsburg, PA, USA, 2018. [Google Scholar]
- Neto, J.; Montenegro, P.A.; Vale, C.; Calçada, R. Evaluation of the train running safety under crosswinds—A numerical study on the influence of the wind speed and orientation considering the normative Chinese hat model International. J. Rail Transp. 2020, 1–28. [Google Scholar] [CrossRef]
- Neto, J.; Montenegro, P.A.; Calçada, R. An innovative approach for an inverse dynamic model of a freight wagon. In Proceedings of the 1st International Symposium on Risk Analysis and Safety of Complex Structures and Components, Porto, Portugal, 1–2 July 2019. [Google Scholar]
- European Standard. Railway Applications Railway Applications—Track-Rail-Part1: Vignole Railway 46 kg/m and above; peEN 13674–1, Final Draft; European Union: Brussels, Belgium, 2002. [Google Scholar]
- Zhai, W.; Wang, K.; Cai, C. Fundamentals of vehicle-track coupled dynamics. Veh. Syst. Dyn. 2009, 47, 1349–1376. [Google Scholar] [CrossRef]
- ERRI D 214/RP 5. Rail Bridges for Speeds > 200 km/h: NUMERICAL Investigation of the Effect of Track Irregularities at Bridge Resonance; European Rail Research Institute: Utrecht, The Netherlands, 1999. [Google Scholar]
- UIC 774-3-R. Track/Bridge Interaction—Recommendations for Calculation, 2nd ed.; International Union of Railways (UIC): Paris, France, 2001. [Google Scholar]
- Wu, Y.D.; Yang, Y.B. Steady-state response and riding comfort of trains moving over a series of simply supported bridges. Eng. Struct. 2003, 25, 251–265. [Google Scholar] [CrossRef]
- ERRI D 202/RP 11. Improved Knowledge of Forces in CWR Track (Including Switches): Parametric Study and Sensivity Analysis of Cwerri; European Rail Research Institute: Utrecht, The Netherlands, 1999. [Google Scholar]
- Auersch, L. Dynamic interaction of various beams with the underlying soil—Finite and infinite, half-space and Winkler models. Eur. J. Mech. A/Solids 2008, 27, 933–958. [Google Scholar] [CrossRef]
- Neves, S.; Montenegro, P.; Azevedo, A.; Calçada, R. A direct method for analyzing the nonlinear vehicle–structure interaction. Eng. Struct. 2014, 69, 83–89. [Google Scholar] [CrossRef]
- Montenegro, P.A.; Neves, S.G.M.; Azevedo, A.F.M.; Calçada, R. A nonlinear vehicle-structure interaction methodology with wheel-rail detachment and reattachment. In Proceedings of the COMPDYN 2013—4th ECCOMAS Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Kos, Greece, 12–14 June 2013. [Google Scholar]
- Neves, S.; Azevedo, A.; Calçada, R. A direct method for analyzing the vertical vehicle–structure interaction. Eng. Struct. 2012, 34, 414–420. [Google Scholar] [CrossRef]
- Montenegro, P.; Neves, S.; Calçada, R.; Tanabe, M.; Sogabe, M. Wheel-rail contact formulation for analyzing the lateral train-structure dynamic interaction. Comput. Struct. 2015, 152, 200–214. [Google Scholar] [CrossRef]
- Hertz, H. Ueber die Berührung fester elastischer Körper [On the contact of elastic solids]. J. Reine Angew. Math. 1882, 92, 156–171. [Google Scholar]
- Kalker, J.J. Book of Tables for the Hertzian Creep-Force Law; Delft University of Technology: Budapest, Hungary, 1996. [Google Scholar]
- MATLAB®. Release R2018a; The MathWorks Inc.: Natick, MA, USA, 2018. [Google Scholar]
- Montenegro, P.A. A Methodology for the Assessment of the Train Running Safety on Bridges; Faculty of Engineering of the University of Porto: Porto, Portugal, 2015. [Google Scholar]
- Abell, M.L.; Braselton, J.P.; Rafter, J.A. Statistics with Mathematica; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Brandt, A. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Entezami, M.; Roberts, C.; Weston, P.; Stewart, E.; Amini, A.; Papaelias, M. Perspectives on railway axle bearing condition monitoring. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2019, 234, 17–31. [Google Scholar] [CrossRef]
- Hasan, T. Complex Demodulation: Some Theory and Applications. Handb. Stat. 1983, 3, 125–156. [Google Scholar]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Car body mass, mcb | 35,640 kg |
| Car body roll moment of inertia, Icb,x | 55,120 kg·m2 |
| Car body pitch moment of inertia, Icb,y | 1,475,000 kg·m2 |
| Car body yaw moment of inertia, Icb,z | 1,477,000 kg·m2 |
| Bogie mass, mb | 2829 kg |
| Bogie roll moment of inertia, Ib,x | 2700 kg·m2 |
| Bogie pitch moment of inertia, Ib,y | 1931.49 kg·m2 |
| Bogie yaw moment of inertia, Ib,z | 3878.76 kg·m2 |
| Wheelset mass, mw | 1711 kg |
| Wheelset roll moment of inertia, Iw,x | 733.4303 kg·m2 |
| Wheelset yaw moment of inertia, Iw,z | 733.4303 kg·m2 |
| Stiffness of the primary longitudinal suspension, k1,x | 44,981,000 N/m |
| Stiffness of the primary transversal suspension, k1,y | 30,948,200 N/m |
| Stiffness of the primary vertical suspension, k1,z | 1,652,820 N/m |
| Damping of the primary vertical suspension, c1,z | 16,739 N·s/m |
| Stiffness of the secondary longitudinal suspension, k2,x | 4,905,000 N/m |
| Stiffness of the secondary transversal suspension, k2,y | 2,500,000 N/m |
| Stiffness of the secondary vertical suspension, k2,z | 734,832 N/m |
| Damping of the secondary longitudinal suspension, c2,x | 400,000 N·s/m |
| Damping of the secondary transversal suspension, c2,y | 17,500 N·s/m |
| Damping of the secondary vertical suspension, c2,z | 35,000 N·s/m |
| The static load transmitted by each wheel | 64,000 N |
| Longitudinal distance between bogies, a1 | 19 m |
| Longitudinal distance between wheelsets, a2 | 2.7 m |
| Transversal distance between vertical secondary suspensions, b1 | 2.144 m |
| Transversal distance between longitudinal secondary suspensions, b2 | 2.846 m |
| Transversal distance between primary suspensions, b3 | 2.144 m |
| Vertical distance between car body center and secondary suspension, h1 | 0.936 m |
| Vertical distance between bogie center and secondary suspension, h2 | 0.142 m |
| Vertical distance between bogie center and wheelset center, h3 | 0.065 m |
| Nominal rolling radius, rw | 0.43 m |
| Gauge, s | 1.67 m |
| Parameter | Value |
|---|---|
| Car body mass, mcb | 41,100 kg |
| Car body roll moment of inertia, Icb,x | 48,997.023 kg·m2 |
| Car body pitch moment of inertia, Icb,y | 673,322.463 kg·m2 |
| Car body yaw moment of inertia, Icb,z | 665,107.6 kg·m2 |
| Wheelset mass, mw | 1246.52 kg |
| Wheelset roll moment of inertia, Iw,x | 311.839 kg·m2 |
| Wheelset yaw moment of inertia, Iw,z | 311.839 kg·m2 |
| Stiffness of the longitudinal suspension, k1,x | 44,981,000 N/m |
| Stiffness of the transversal suspension, k1,y | 30,948,200 N/m |
| Stiffness of the vertical suspension, k1,z | 1,860,000 N/m |
| Damping of the vertical suspension, c1,z | 16,739 N·s/m |
| The static load transmitted by each wheel | 107,000 N |
| Longitudinal distance between wheelsets, a1 | 6 m |
| Transversal distance between vertical suspensions, b1 | 2.17 m |
| Vertical distance between car body center and suspension, h1 | 1.867 m |
| Nominal rolling radius, rw | 0.43 m |
| Gauge, s | 1.67 m |
| Parameter | Value | ||
|---|---|---|---|
| Rail | Ar (m2) | 7.67 × 10−4 | [41] |
| ρr (kg/m3) | 7850 | [41] | |
| Ir (m4) | 30.38 × 10−6 | [41] | |
| νr | 0.28 | [41] | |
| Er (N/m2) | 210 × 109 | [41] | |
| Rail pad, longitudinal | Kp (N/m) | 20 × 106 | [42] |
| Cp (N·s/m) | 50 × 103 | [42] | |
| Rail pad, lateral | Kp (N/m) | 20 × 106 | [42] |
| Cp (N·s/m) | 50 × 103 | [42] | |
| Rail pad, vertical | Kp (N/m) | 500 × 106 | [43] |
| Cp (N·s/m) | 200 × 103 | [43] | |
| Sleeper | ρs (kg/m3) | 2590 | |
| νs | 0.2 | ||
| Es (N/m2) | 40.9 × 109 | ||
| Ballast, longitudinal | Kb,x (N/m) | 9000 × 103 | [44] |
| Cb,x (N·s/m) | 15 × 103 | [45] | |
| Ballast, lateral | Kb,y (N/m) | 2250 × 103 | [46] |
| Cb,y (N·s/m) | 15 × 103 | [45] | |
| Ballast, vertical | Kb,z (N/m) | 30 × 106 | [46] |
| Cb,z (N·s/m) | 15 × 103 | [45] | |
| Foundation, longitudinal | Kf,x (N/m) | 20 × 106 | [47] |
| Cf,x (N·s/m) | 5.01 × 102 | [47] | |
| Foundation, lateral | Kf,y (N/m) | 20 × 106 | [47] |
| Cf,y (N·s/m) | 5.01 × 102 | [47] | |
| Foundation, vertical | Kf,z (N/m) | 20 × 106 | [47] |
| Cf,z (N·s/m) | 5.01 × 102 | [47] | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mosleh, A.; Montenegro, P.A.; Costa, P.A.; Calçada, R. Railway Vehicle Wheel Flat Detection with Multiple Records Using Spectral Kurtosis Analysis. Appl. Sci. 2021, 11, 4002. https://doi.org/10.3390/app11094002
Mosleh A, Montenegro PA, Costa PA, Calçada R. Railway Vehicle Wheel Flat Detection with Multiple Records Using Spectral Kurtosis Analysis. Applied Sciences. 2021; 11(9):4002. https://doi.org/10.3390/app11094002
Chicago/Turabian StyleMosleh, Araliya, Pedro Aires Montenegro, Pedro Alves Costa, and Rui Calçada. 2021. "Railway Vehicle Wheel Flat Detection with Multiple Records Using Spectral Kurtosis Analysis" Applied Sciences 11, no. 9: 4002. https://doi.org/10.3390/app11094002
APA StyleMosleh, A., Montenegro, P. A., Costa, P. A., & Calçada, R. (2021). Railway Vehicle Wheel Flat Detection with Multiple Records Using Spectral Kurtosis Analysis. Applied Sciences, 11(9), 4002. https://doi.org/10.3390/app11094002