
Adaptive Sliding Mode Control for a Robotic Manipulator with Unknown Friction and Unknown Control Direction



Abstract
1. Introduction
2. Problem Formulation and Preliminary
2.1. Manipulator Dynamics Description
2.2. Nussbaum Function
3. Control Design
3.1. Adaptive Sliding Mode Control
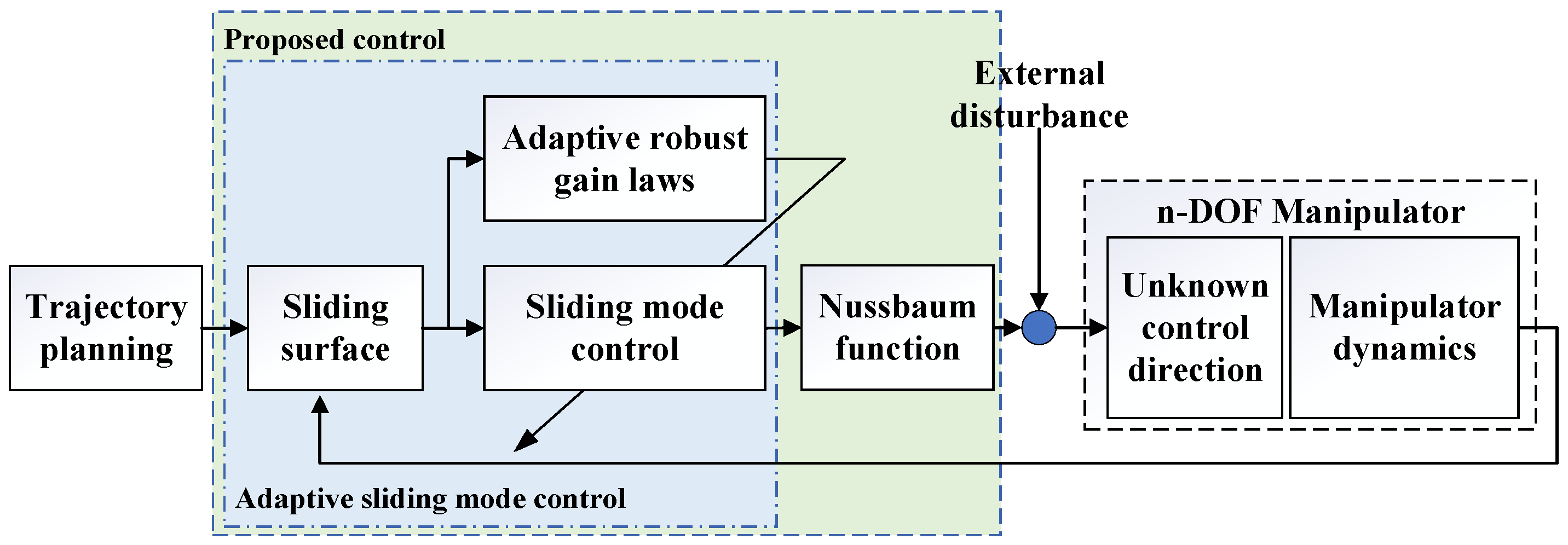
3.2. Proposed Control
4. Numerical Simulations
4.1. Simulation Descriptions
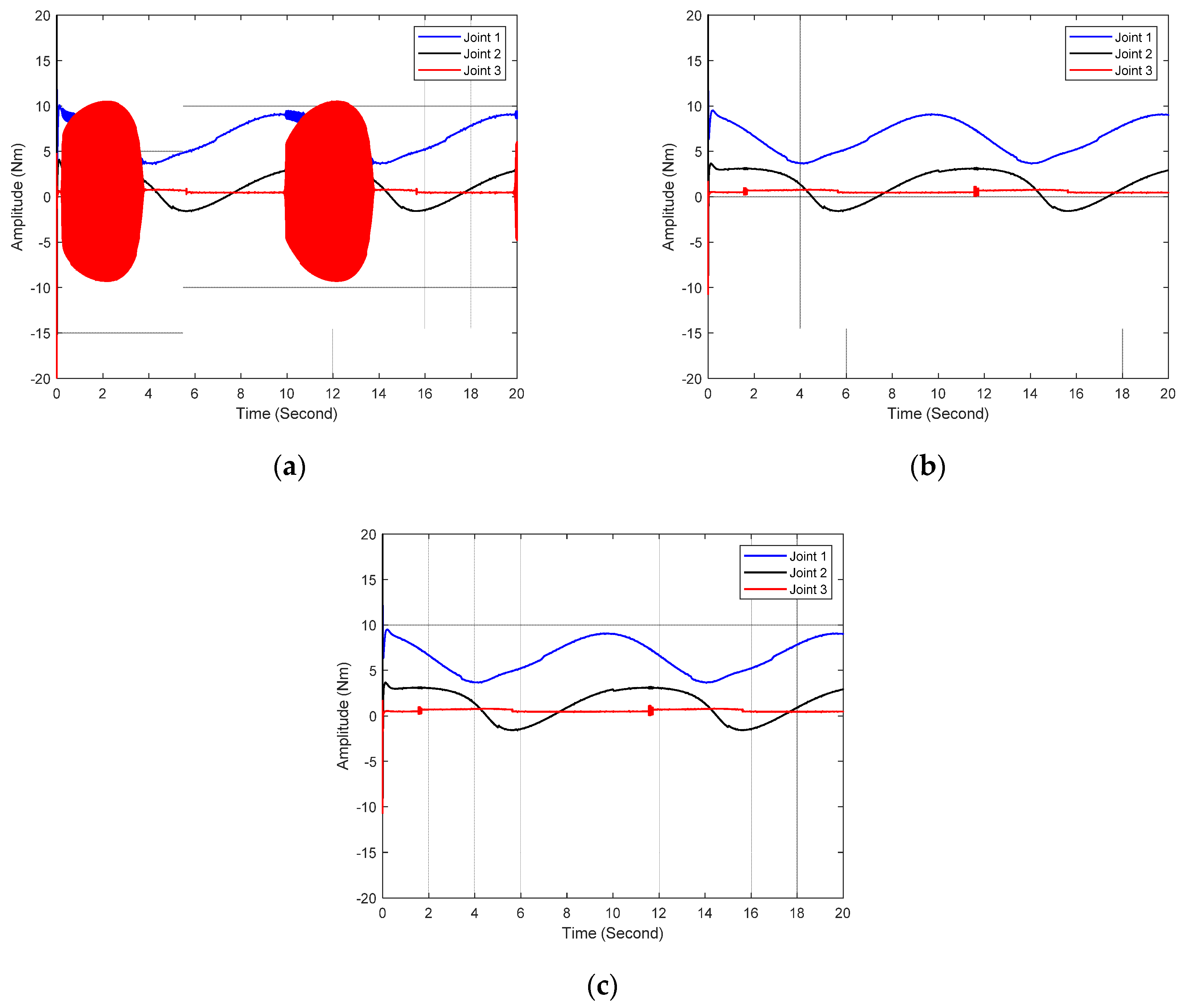
4.2. Simulation Comparisons
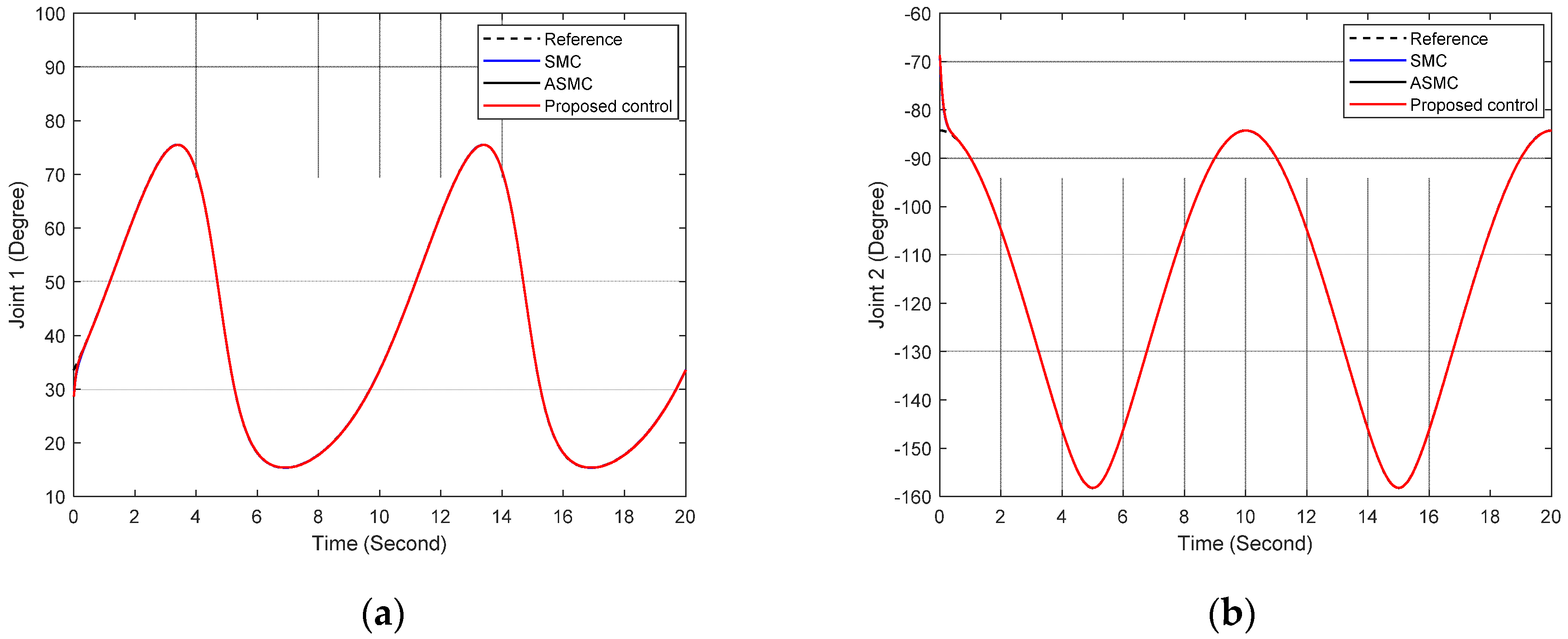
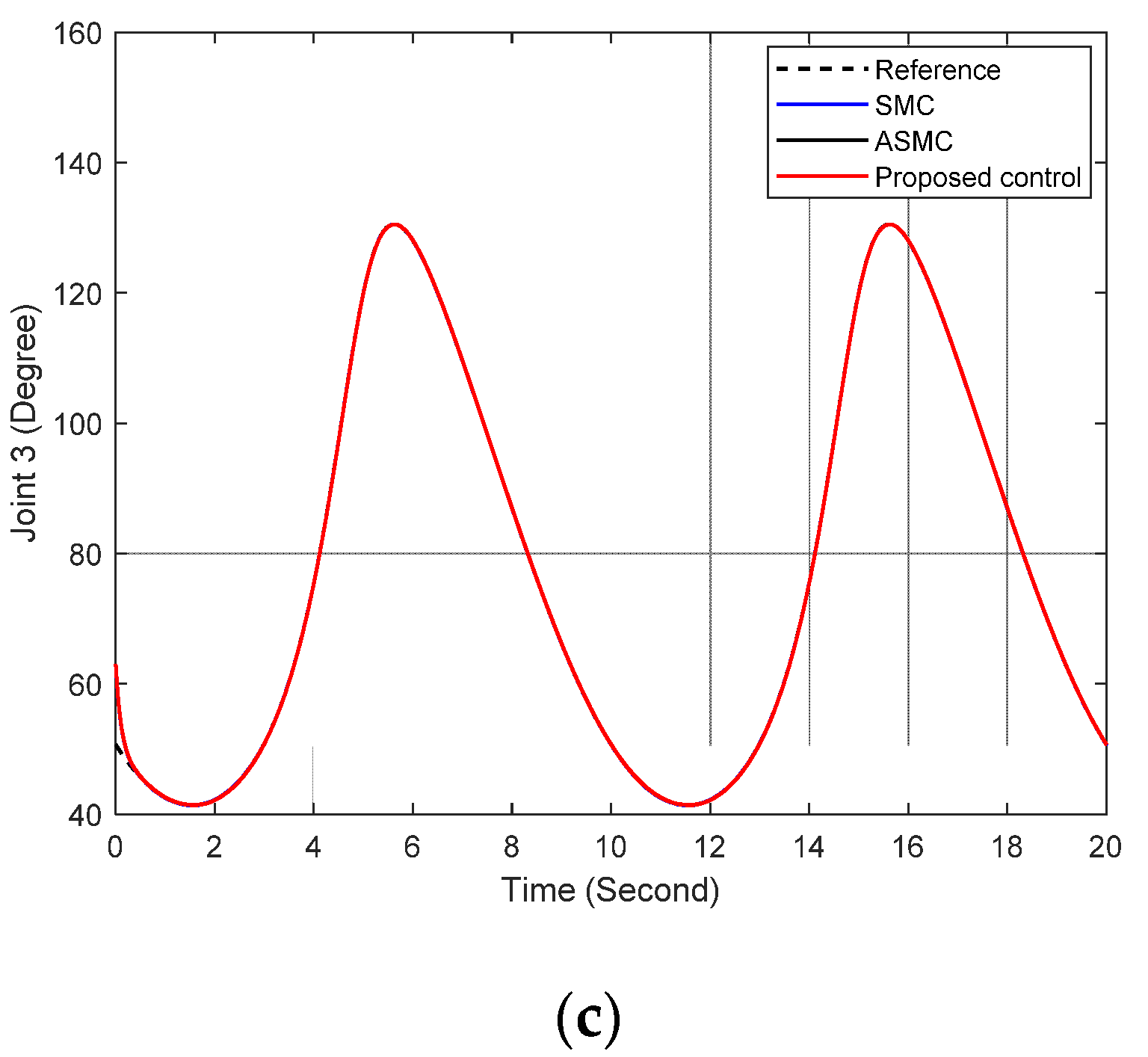
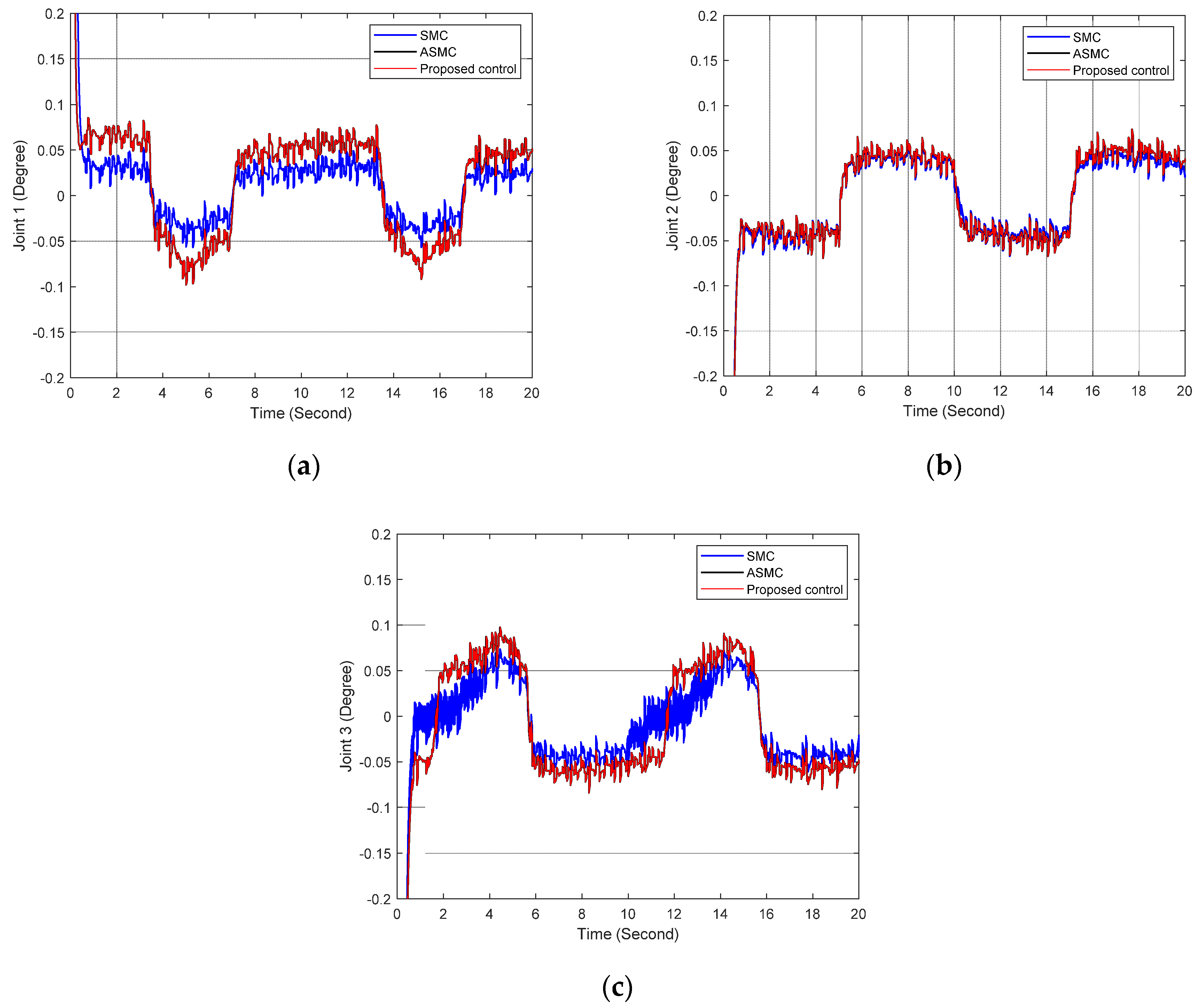
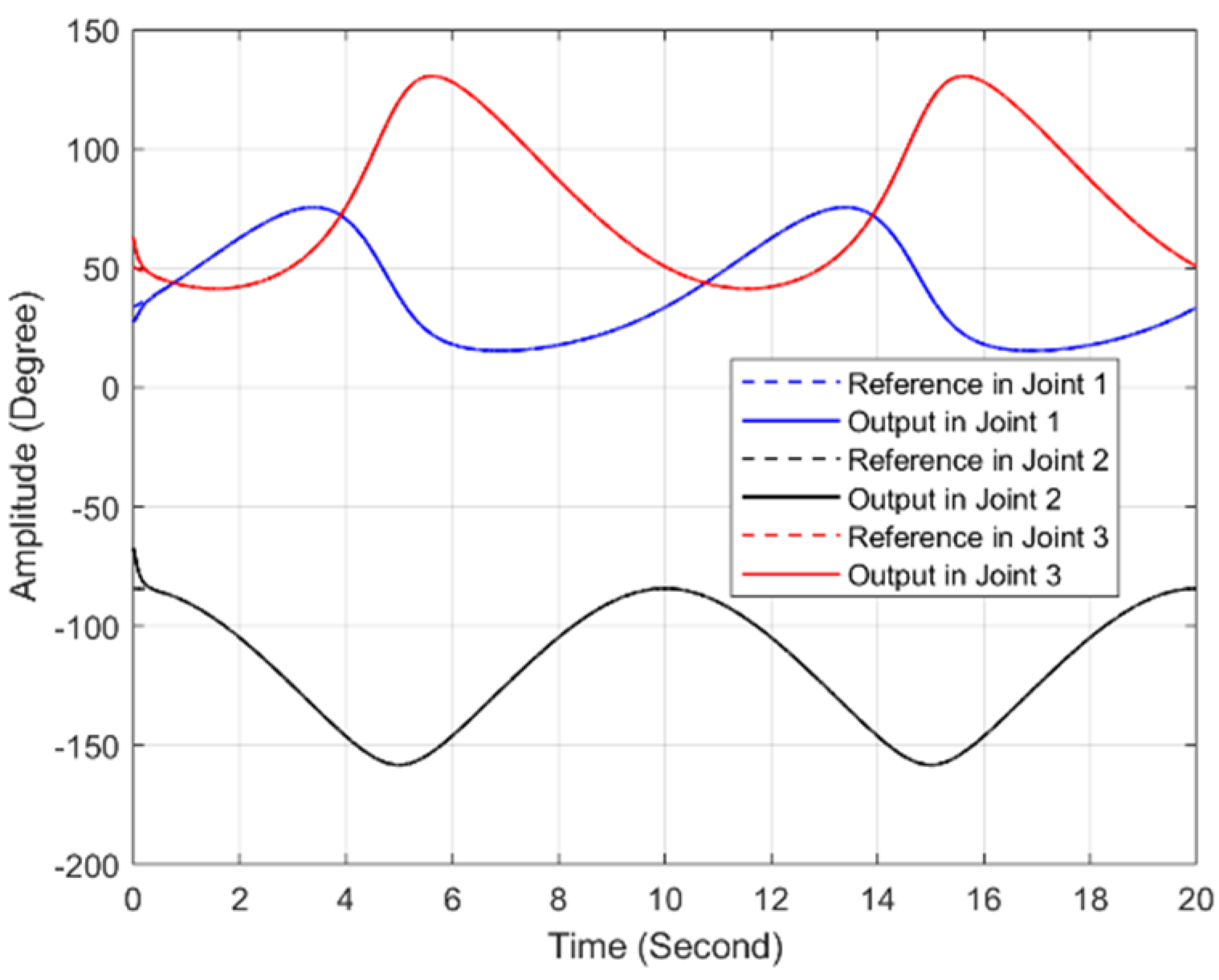
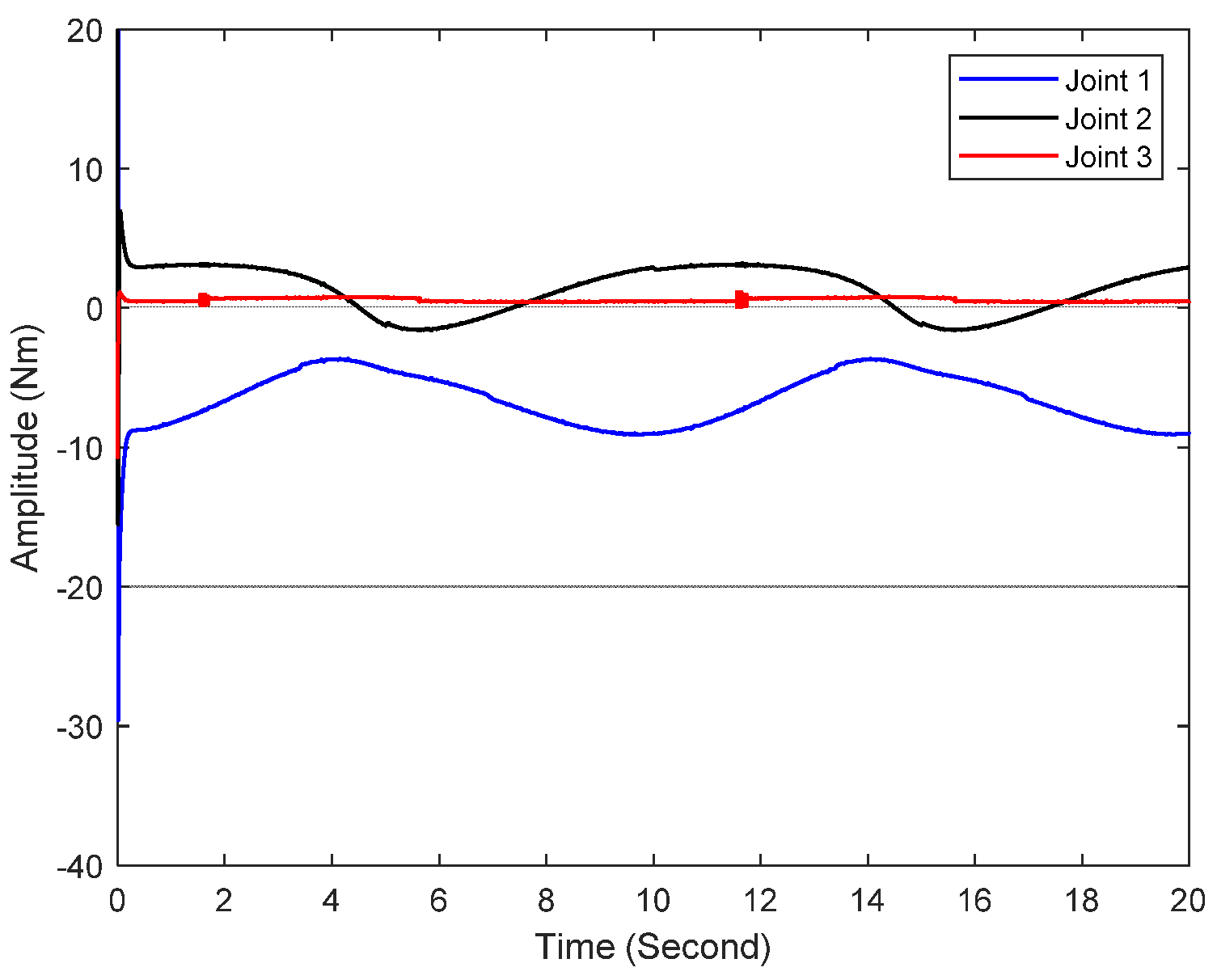
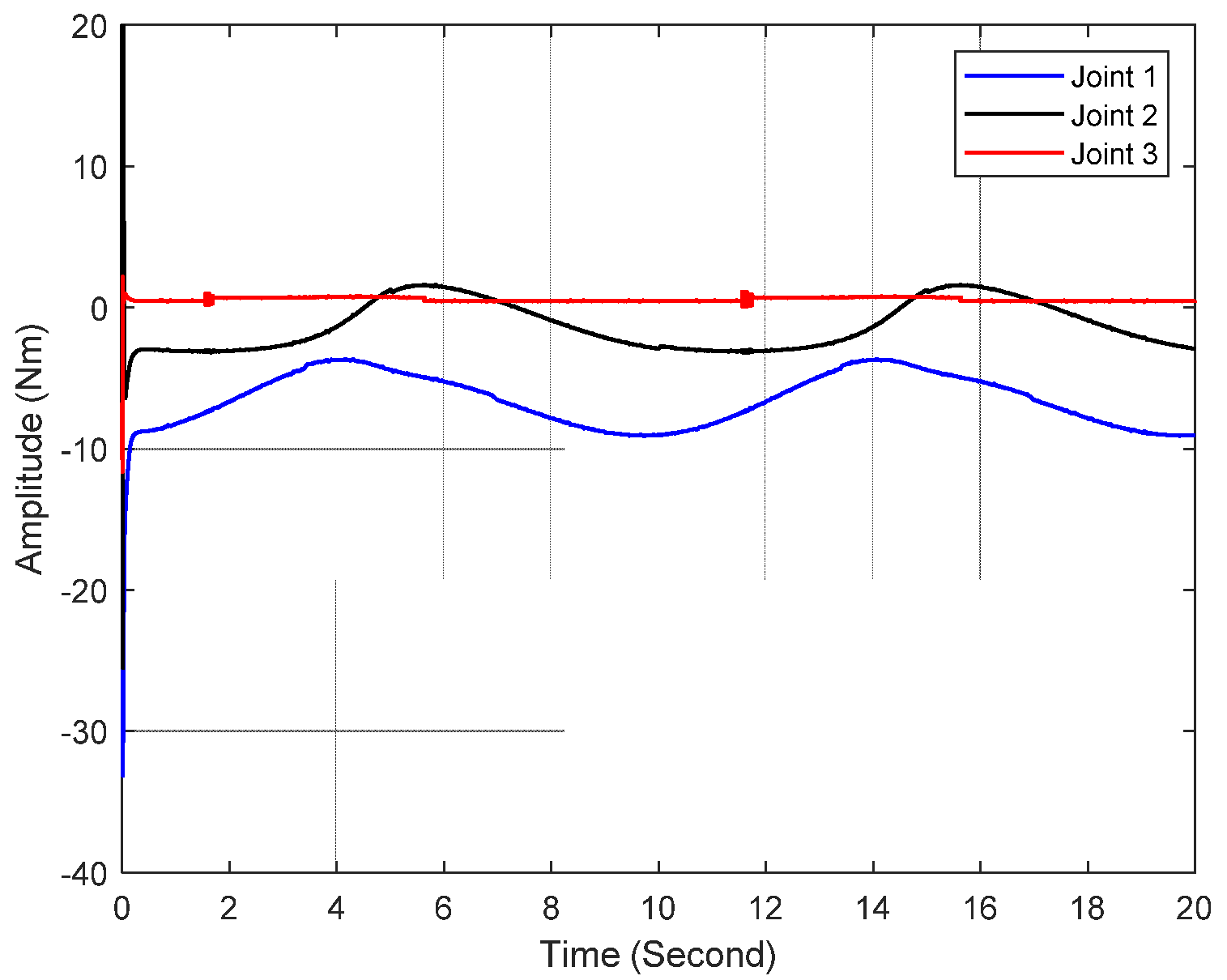
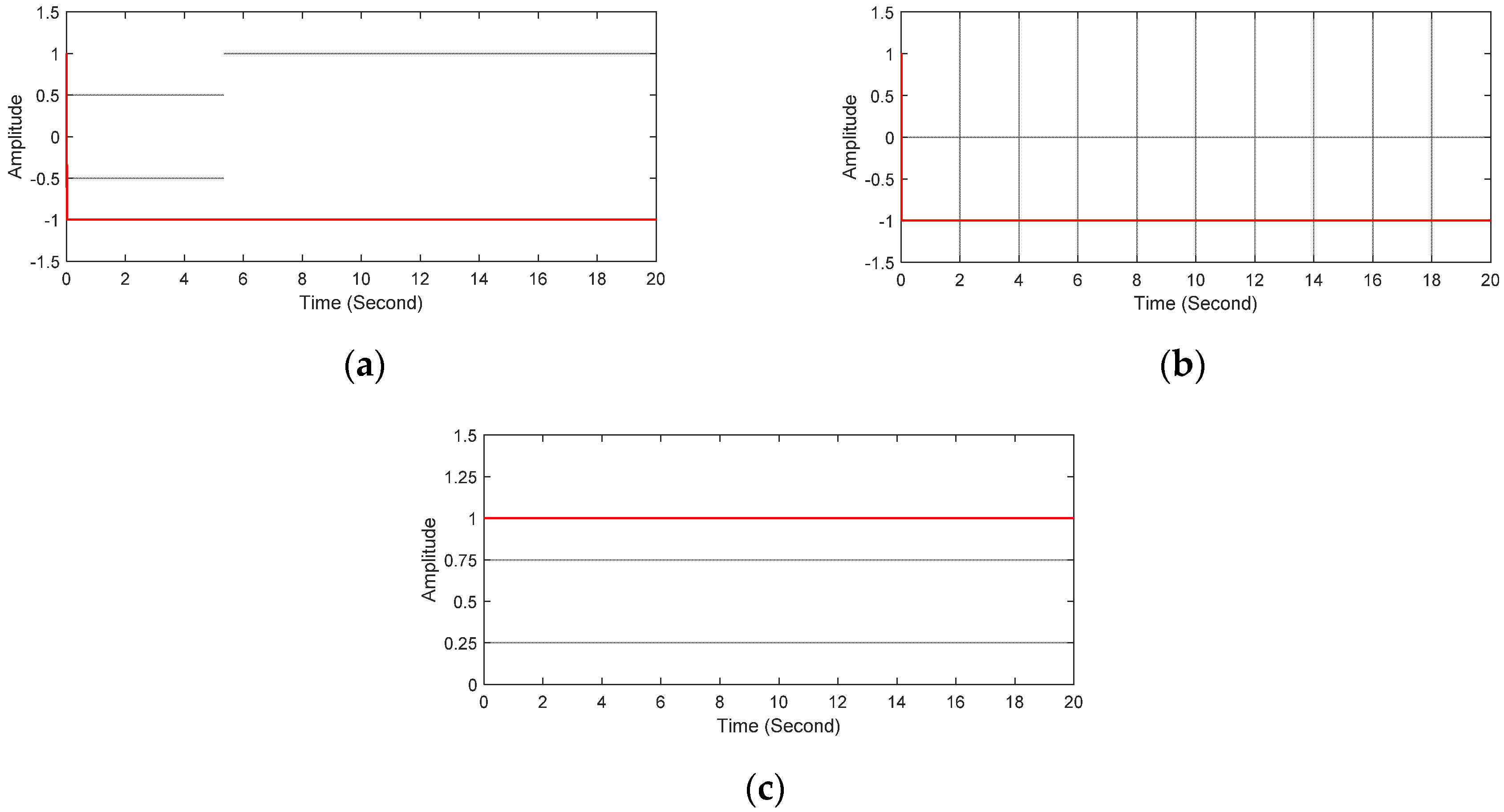
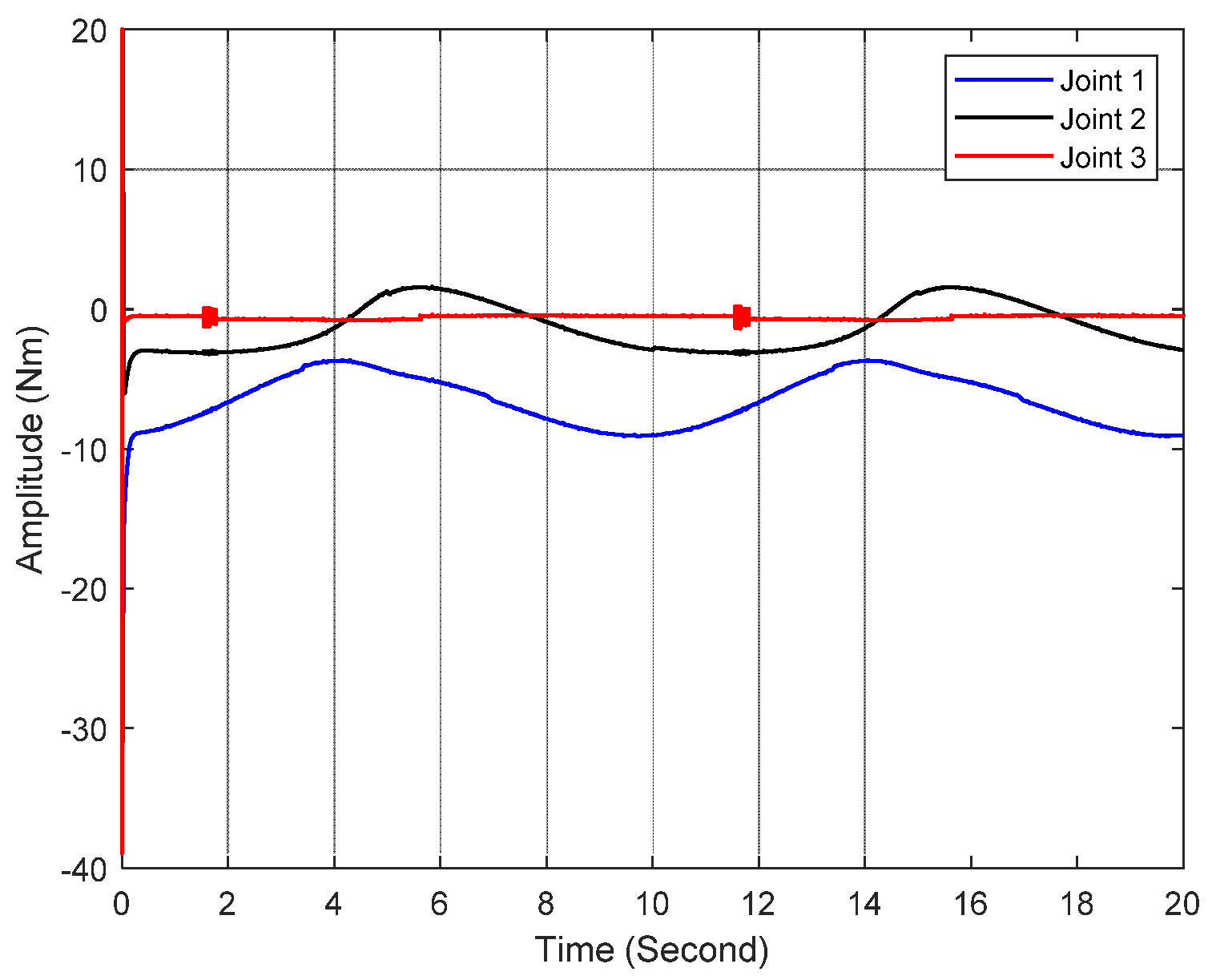
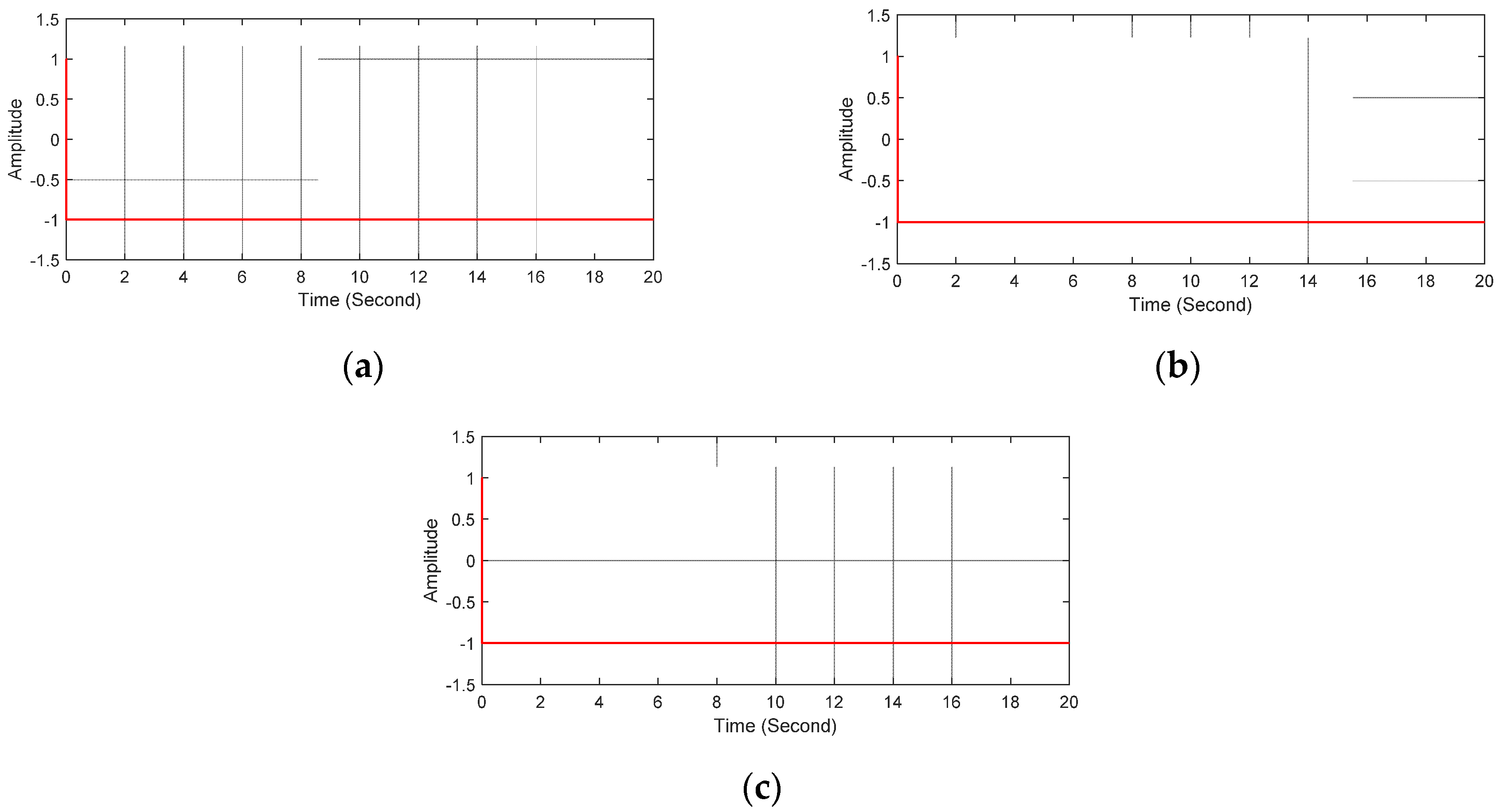
4.3. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zanchettin, A.M.; Rocco, P.; Robertsson, A.; Johansson, R. Exploiting task redundancy in industrial manipulators during drilling operations. Proc. IEEE Int. Conf. Robot. Autom. 2011, 128–133. [Google Scholar] [CrossRef]
- Kazerooni, H.; Bausch, J.J.; Kramer, B.M. An Approach to Automated Deburring by Robot Manipulators. J. Dyn. Syst. Meas. Control. 1986, 108, 354–359. [Google Scholar] [CrossRef]
- Li, G.; Huang, H.; Guo, H.; Li, B. Dynamic Modeling and Control for a Deployable Grasping Manipulator. IEEE Access 2019, 7, 23000–23011. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, T.; Chen, F.; Hu, Y.; Su, C.Y.; Fukuda, T. Reinforcement Learning of Manipulation and Grasping Using Dynamical Movement Primitives for a Humanoidlike Mobile Manipulator. IEEE/ASME Trans. Mechatron. 2018, 23, 121–131. [Google Scholar] [CrossRef]
- Tran, D.T.; Dao, H.V.; Dinh, T.Q.; Ahn, K.K. Output feedback control via linear extended state observer for an uncertain manipulator with output constraints and input dead-zone. Electronics 2020, 9, 1355. [Google Scholar] [CrossRef]
- Tran, D.-T.; Truong, H.-V.-A.; Ahn, K.K. Adaptive backstepping sliding mode control based RBFNN for a hydraulic manipulator including actuator dynamics. Appl. Sci. 2019, 9, 1265. [Google Scholar] [CrossRef]
- Yen, V.T.; Nan, W.Y.; van Cuong, P. Robust Adaptive Sliding Mode Neural Networks Control for Industrial Robot Manipulators. Int. J. Control. Autom. Syst. 2019, 17, 783–792. [Google Scholar] [CrossRef]
- Van, M.; Mavrovouniotis, M.; Ge, S.S. An adaptive backstepping nonsingular fast terminal sliding mode control for robust fault-tolerant control of robot manipulators. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 49, 1448–1458. [Google Scholar] [CrossRef]
- Le, Q.D.; Kang, H.-J. Finite-Time Fault-Tolerant Control for a Robot Manipulator Based on Synchronous Terminal Sliding Mode Control. Appl. Sci. 2020, 10, 2998. Available online: https://www.mdpi.com/2076-3417/10/9/2998 (accessed on 25 April 2020). [CrossRef]
- Lee, J.; Chang, P.H.; Jin, M. Adaptive Integral Sliding Mode Control With Time-Delay Estimation for Robot Manipulators. IEEE Trans. Ind. Electron. 2017, 64, 6796–6804. [Google Scholar] [CrossRef]
- Tran, D.T.; Ba, D.X.; Ahn, K.K. Adaptive Backstepping Sliding Mode Control for Equilibrium Position Tracking of an Electrohydraulic Elastic Manipulator. IEEE Trans. Ind. Electron. 2020, 67, 3860–3869. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems; CRC Press: Boca Ration, FL, USA, 2009. [Google Scholar]
- Perruquetti, W.; Barbot, J.-P. Sliding Mode Control in Engineering; CRC Press: Boca Ration, FL, USA, 2002. [Google Scholar]
- Roopaei, M.; Jahromi, M.Z. Chattering-free fuzzy sliding mode control in MIMO uncertain systems. Nonlinear Anal. Theory Methods Appl. 2009, 71, 4430–4437. [Google Scholar] [CrossRef]
- Amer, A.F.; Sallam, E.A.; Elawady, W.M. Adaptive fuzzy sliding mode control using supervisory fuzzy control for 3 DOF planar robot manipulators. Appl. Soft Comput. J. 2011, 11, 4943–4953. [Google Scholar] [CrossRef]
- Jung, S. Improvement of Tracking Control of a Sliding Mode Controller for Robot Manipulators by a Neural Network. Int. J. Control. Autom. Syst. 2018, 16, 937–943. [Google Scholar] [CrossRef]
- Zhao, L.; Li, Q.; Liu, B.; Cheng, H. Trajectory Tracking Control of a One Degree of Freedom Manipulator Based on a Switched Sliding Mode Controller with a Novel Extended State Observer Framework. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1110–1118. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, S.; Yan, F.; Chen, B. Sliding Mode Control of A Newly Designed Cable-Driven Manipulator with Time Delay Estimation. In Proceedings of the 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; No. 51705243. pp. 1605–1609. [Google Scholar]
- Roy, S.; Kar, I.N. Adaptive sliding mode control of a class of nonlinear systems with artificial delay. J. Franklin Inst. 2017, 354, 8156–8179. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Lin, C.; Yu, H. Adaptive Neural Command Filtering Control for Nonlinear MIMO Systems with Saturation Input and Unknown Control Direction. IEEE Trans. Cybern. 2020, 50, 2536–2545. [Google Scholar] [CrossRef] [PubMed]
- Zhai, D.; An, L.; Li, X.; Zhang, Q. Adaptive fault-tolerant control for nonlinear systems with multiple sensor faults and unknown control directions. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 4436–4446. [Google Scholar] [CrossRef]
- Wang, H.; Karimi, H.R.; Liu, P.X.; Yang, H. Adaptive neural control of nonlinear systems with unknown control directions and input dead-zone. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1897–1907. [Google Scholar] [CrossRef]
- Xu, B.; Qi, R.; Jiang, B. Adaptive Fault-Tolerant Control for HSV with Unknown Control Direction. IEEE Trans. Aerosp. Electron. Syst. 2019. [Google Scholar] [CrossRef]
- Habibi, H.; Nohooji, H.R.; Howard, I. Adaptive PID control of wind turbines for power regulation with unknown control direction and actuator faults. IEEE Access 2018, 6, 37464–37479. [Google Scholar] [CrossRef]
- Xia, J.; Zhang, J.; Feng, J.; Wang, Z.; Zhuang, G. Command Filter-Based Adaptive Fuzzy Control for Nonlinear Systems With Unknown Control Directions. IEEE Trans. Syst. Man Cybern. Syst. 2019, 1–9. [Google Scholar] [CrossRef]
- Wang, C.; Wen, C.; Guo, L. Adaptive Consensus Control for Nonlinear Multi-Agent Systems With Unknown Control Directions and Time-Varying Actuator Faults. IEEE Trans. Autom. Control. 2020, 1. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, H. Adaptive Fuzzy Tracking Control of Nonlinear Switched Stochastic Systems With Prescribed Performance and Unknown Control Directions. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 590–599. [Google Scholar] [CrossRef]
- Ge, S.S.; Wang, J. Robust adaptive neural control for a class of perturbed strict feedback nonlinear systems. IEEE Trans. Neural Netw. 2002, 13, 1409–1419. [Google Scholar] [CrossRef]
- Boulkroune, A.; Tadjine, M.; M’Saad, M.; Farza, M. Fuzzy adaptive controller for MIMO nonlinear systems with known and unknown control direction. Fuzzy Sets Syst. 2010, 161, 797–820. [Google Scholar] [CrossRef]
- Ramezani, Z.; Arefi, M.M.; Zargarzadeh, H.; Jahed-Motlagh, M.R. Neuro observer-based control of pure feedback MIMO systems with unknown control direction. IET Control Theory Appl. 2017, 11, 213–224. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Variable | Description |
|---|---|---|---|
| Length of the 1st link | Mass of the 1st link | ||
| Length of the 2nd link | Mass of the 2nd link | ||
| Length of the 3rd link | Mass of the 3rd link | ||
| Gravity constant |
| Controllers | Parameters |
|---|---|
| SMC | , , |
| ASMC | , , , , |
| Proposed control | , , , , |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.-H.; Tran, M.S.; Tran, D.-T. Adaptive Sliding Mode Control for a Robotic Manipulator with Unknown Friction and Unknown Control Direction. Appl. Sci. 2021, 11, 3919. https://doi.org/10.3390/app11093919
Han S-H, Tran MS, Tran D-T. Adaptive Sliding Mode Control for a Robotic Manipulator with Unknown Friction and Unknown Control Direction. Applied Sciences. 2021; 11(9):3919. https://doi.org/10.3390/app11093919
Chicago/Turabian StyleHan, Seung-Hun, Manh Son Tran, and Duc-Thien Tran. 2021. "Adaptive Sliding Mode Control for a Robotic Manipulator with Unknown Friction and Unknown Control Direction" Applied Sciences 11, no. 9: 3919. https://doi.org/10.3390/app11093919
APA StyleHan, S.-H., Tran, M. S., & Tran, D.-T. (2021). Adaptive Sliding Mode Control for a Robotic Manipulator with Unknown Friction and Unknown Control Direction. Applied Sciences, 11(9), 3919. https://doi.org/10.3390/app11093919