
Risks and Benefits of Crew Reduction and/or Removal with Increased Automation on the Ship Operator: A Licensed Deck Officer’s Perspective


Abstract
1. Introduction
2. Background
2.1. Why Autonomous Shipping
2.2. Autonomous Shipping Projects
2.3. Defined Officer and Crew Positions
- Bridge Watch. Typical watch rotation consists of 4 h on watch, 8 h off watch throughout a 24 h day. 6 h on watch and 6 h off watch [31] is also common, but more so on inland waterways and tug vessels
- 3/M typically stands the 0800–1200 and 2000–2400 bridge watch and is normally the Damage Control Officer. This is the person in charge of all fire-fighting and chemical, biological, and radiological defense (CBR-D) equipment onboard the vessel
- 2/M normally stands the 0000–0400 and 1200–1600 bridge watch and is the vessel’s Navigator. These responsibilities include voyage planning and updating and maintaining all navigational equipment onboard. They are also responsible for onboard survival craft equipment, which includes: lifeboats, life-rings, emergency communication devices, and pyrotechnics
- A minimum of two Mates onboard must be licensed to operate and maintain the Global Maritime Distress Safety System (GMDSS), which contains all emergency and routine communication equipment onboard. The GMDSS station is normally located in a designated area on the bridge deck
- C/M normally stands the 0400–0800 and 1600–2000 and is also the Cargo Mate. He/she maintains a Management level license and is in charge of the stability of the vessel in-port and underway as well as cargo operations and cargo inspections. The C/M has many other ancillary duties including crew training, vessel maintenance, waste disposal, and overtime management. The C/M is in charge of all unlicensed Deck crew, which typically consists of three unlicensed Able-Bodied Seamen (AB’s) under the guidance of the senior unlicensed seafarer, the Bosun’s Mate (BOS’N)
- Typically the 1A/E through 3A/E stand watch in the engine room
- Unlicensed members of the Engineering Department, similar to that of OSs and ABs, are called Wipers and Qualified Members of the Engineering Department (QMEDs), respectively.
- Unmanned engine rooms still have a Licensed Engineer on shift for standby 24 h a day.
2.4. Risks of Reducing Crew on Crew and Vessel Safety
2.4.1. Navigational Accidents and Human Error
2.4.2. Fatigue
2.4.3. Mariner Experience and Situational Awareness
2.4.4. Ship Regulation, Insurance, and Liability
3. Materials and Methods
- Strongly Disagree
- Disagree
- Neither Disagree/Agree
- Agree
- Strongly Agree
4. Results
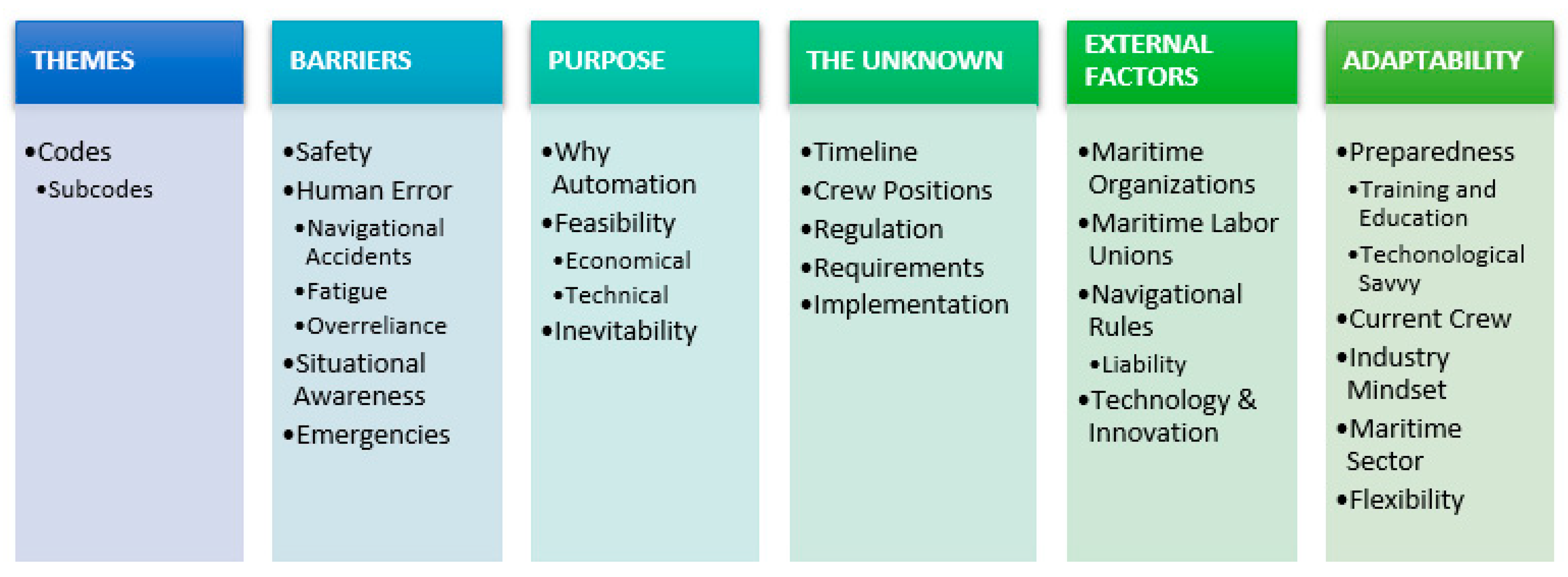
5. Discussion
5.1. Barriers
5.2. Purpose
5.3. The Unknown
5.4. External Factors
5.5. Adaptability
5.6. Limitations
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sharma, A.; Kim, T.; Nazir, S. Catching up with Time? Examining the STCW Competence Framework for Autonomous Shipping. In Proceedings of the Ergoship Conference, Haugesund, Denmark, 24–25 September 2019; p. 7. [Google Scholar]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the Assessment of Potential Impact of Unmanned Vessels on Maritime Transportation Safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Blanke, M.; Henriques, M.; Bang, J. A Pre-Analysis on Autonomous Ships; Technical University of Denmark: Kopenhagen, Denmark, 2017; p. 27. [Google Scholar]
- Montewka, J.; Wróbel, K.; Heikkilä, E.; Valdez-Banda, O.; Goerlandt, F.; Haugen, S. Challenges, Solution Proposals and Research Directions in Safety and Risk Assessment of Autonomous Shipping. In Proceedings of the Probabilistic Safety Assessment and Management PSAM 14, Los Angeles, CA, USA, 16–21 September 2018; p. 12. [Google Scholar]
- Goerlandt, F. Maritime Autonomous Surface Ships from a Risk Governance Perspective: Interpretation and Implications. Saf. Sci. 2020, 128, 104758. [Google Scholar] [CrossRef]
- Mallam, S.C.; Nazir, S.; Sharma, A. The Human Element in Future Maritime Operations—Perceived Impact of Autonomous Shipping. Ergonomics 2020, 63, 334–345. [Google Scholar] [CrossRef] [PubMed]
- Fonseca, T.; Lagdami, K.; Schroder-Hinrichs, J.-U. Emergent Technologies and Maritime Transport: Challenges and Opportunities. In Proceedings of the 20th Commemorative Annual General Assembly of the International Association of Maritime Universities (IAMU), Tokyo, Japan, 30 October–1 November 2019; World Maritime University: Tokyo, Japan; p. 14. [Google Scholar]
- Wong, A. Autonomous Ships. PSA Int. 2017. Available online: https://www.globalpsa.com/autonomous-ships/ (accessed on 15 April 2021).
- Gu, Y.; Goez, J.C.; Guajardo, M.; Wallace, S.W. Autonomous Vessels: State of the Art and Potential Opportunities in Logistics; Centre for Applied Research at NHH: Bergen, Norway, 2019; p. 44. [Google Scholar]
- Danish Maritime Authority. Analysis of Regulatory Barriers to the Use of Autonomous Ships; Danish Maritime Authority: Korsor, Denmark, 2017; p. 141. [Google Scholar]
- Ahvenjarvi, S. The Human Element and Autonomous Ships. Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 517–521. [Google Scholar] [CrossRef]
- Kretschmann, L.; Burmeister, H.-C.; Jahn, C. Analyzing the Economic Benefit of Unmanned Autonomous Ships: An Exploratory Cost-Comparison between an Autonomous and a Conventional Bulk Carrier. Res. Transp. Bus. Manag. 2017, 25, 76–86. [Google Scholar] [CrossRef]
- Allianz Global Corporate & Specialty. Safety and Shipping Review 2019; Allianz Global Corporate & Specialty SE: Munich, Germany, 2019; p. 52. [Google Scholar]
- Burmeister, H.; Bruhn, W.; Rodseth, O. Can Unmanned Ships Improve Navigational Safety? In Proceedings of the TRA2014 Transport Research Arena, Paris, France, 14–17 April 2014; p. 10. [Google Scholar]
- World Maritime University. Transport. 2040: Automation, Technology, Employment—The Future of Work; World Maritime University: Malmo, Sweden, 2019; p. 169. [Google Scholar]
- Kooij, I.C.; Colling, A.P.; Benson, C.L. When Will Autonomous Ships Arrive? A Technological Forecasting Perspective. In Proceedings of the IMarEST’s 14th International Naval Engineering Conference and Exhibition (INEC 2018), Glasgow, UK, 2–4 October 2018; p. 11. [Google Scholar]
- Rødseth, O.J.; Burmeister, H.-C. Risk Assessment for an Unmanned Merchant Ship. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 8. [Google Scholar] [CrossRef]
- Maritime Unmanned Navigation through Intelligence in Networks (MUNIN). Research in Maritime Autonomous Systems Project Results and Technology Potentials; MUNIN: Hamburg, Germany, 2016. [Google Scholar]
- Colling, A.P.; Hekkenberg, R.G. A Multi-Scenario Simulation Transport Model to Assess the Economics of Semi-Autonomous Platooning Concepts. In Proceedings of the International Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT), Tullamore, Ireland, 25 March 2019; Technische Universität Hamburg-Harburg: Hamburg, Germany, 2019; pp. 132–145. [Google Scholar]
- Meersman, H.; Moschouli, E.; Sys, C.; Van de Voord, E.; Vanelslander, T.; van Hassel, E.; Friedhoff, B.; Hekkenberg, R.G.; Hoyer, K.; Tenzer, M. Developing Performance Indicators for a Logistics Model for Vessel Platooning. In Proceedings of the WCTRS, Special Interest Group 2, Antwerp, Belgium, 3–4 May 2018; pp. 1–10. [Google Scholar]
- NOVIMAR Vessetrain. NOVIMAR and the Vessel Train Concept. Available online: https://novimar.eu/concept/ (accessed on 5 March 2019).
- Bergman, J. MOL Autonomous Shipping Project Targets 2025 for “Practical Use” of Vessels. Available online: https://www.rivieramm.com/news-content-hub/news-content-hub/mol-autonomous-shipping-project-targets-2025-for-practical-use-of-vessels-23778 (accessed on 7 March 2019).
- Cowan, D. Autonomous Ships: Are They the Future of the Seven Seas? Available online: https://www.raconteur.net/finance/autonomous-ships (accessed on 4 April 2019).
- Skredderberget, A. The First Ever Zero Emission, Autonomous Ship. Available online: https://www.yara.com/knowledge-grows/game-changer-for-the-environment/ (accessed on 7 March 2019).
- Nordal, K. Yara Birkeland. Available online: https://www.yara.com/news-and-media/press-kits/yara-birkeland-press-kit/ (accessed on 24 March 2019).
- Hall, M. Ocean Infinity Unveils Fleet of Robot Exploration Vessels. 2020. Offshore Technology, Oil and Gas News and Market Analysis. Available online: https://www.offshore-technology.com/news/ocean-infinity-unveils-fleet-of-robot-exploration-vessels (accessed on 10 March 2020).
- Amos, J. Ocean Infinity: Exploration Company Goes for Robot Boats at Scale. Available online: https://www.bbc.com/news/science-environment-51451577/ (accessed on 23 March 2020).
- Sea Trials Begin for Mayflower Autonomous Ship’s “AI Captain”. Available online: https://newsroom.ibm.com/2020-03-05-Sea-Trials-Begin-for-Mayflower-Autonomous-Ships-AI-Captain (accessed on 15 March 2021).
- Rosendaal, J. Antwerps containerschip ‘Deseo’ semi-autonoom op Westerschelde. Nieuwsblad Transport. Available online: https://www.nieuwsbladtransport.nl/binnenvaart/2021/02/24/antwerps-containerschip-deseo-semi-autonoom-op-westerschelde/ (accessed on 15 March 2021).
- Safety 4 Sea. Semi-Autonomous Sailings Take Place Onboard Shortsea Ship in Belgium. 2021. Available online: https://safety4sea.com/watch-semi-autonomous-sailings-take-place-onboard-shortsea-ship-in-belgium/ (accessed on 15 March 2021).
- Code of Federal Regulations, Title 46 Shipping; Office of the Federal Register, Bernan Press/CFR: Lanham, MD, USA, 2020.
- National Maritime Center. 2020. Available online: https://www.dco.uscg.mil/national_maritime_center/ (accessed on 15 March 2021).
- A Look Inside the Steward Department. Out 2 Sea. Available online: https://out2sea.com/look-inside-steward-department/ (accessed on 16 December 2019).
- Belhumeur, K. What Are the Duties of a Steward on a Ship? Career Trend. 2018. Available online: https://careertrend.com/info-8536298-duties-steward-ship.html (accessed on 16 December 2019).
- European Maritime Safety Agency. Annual Overview of Marine Casualties and Incidents 2020; European Maritime Safety Agency: Lisbon, Portugal, 2020; p. 147. [Google Scholar]
- European Maritime Safety Agency. Annual Overview of Marine Casualties and Incidents 2018; European Maritime Safety Agency: Lisbon, Portugal, 2018; p. 175. [Google Scholar]
- Autonomous Shipping and What It Means for Global Trade. Available online: https://www.cbinsights.com/research/autonomous-shipping-trends/ (accessed on 25 April 2019).
- Kent, J. Risk = Likelihood × Impact. Available online: https://www.cio.com/article/3111304/risk-likelihood-x-impact.html (accessed on 5 June 2020).
- International Maritime Organization. Guidelines on Fatigue; International Maritime Organization: London, UK, 2019. [Google Scholar]
- Belokas, A. STCW Rest Periods: Problems and Best Practices. Available online: https://safety4sea.com/stcw-rest-periods-problems-and-best-practices/ (accessed on 16 March 2021).
- Baumler, R.; Bhatia, B.S.; Kitada, M. Ship First: Seafarers’ Adjustment of Records on Work and Rest Hours. Mar. Policy 2020, 104186. [Google Scholar] [CrossRef]
- Hetherington, C.; Flin, R.; Mearns, K. Safety in Shipping: The Human Element. J. Saf. Res. 2006, 37, 401–411. [Google Scholar] [CrossRef] [PubMed]
- National Transportation Safety Board. Reduce Fatigue-Related Accidents. Available online: https://www.ntsb.gov/safety/mwl/Pages/mwl1-2016.aspx (accessed on 18 December 2018).
- Xhelilaj, E.; Lapa, K. The Role Ofhuman Fatigue Factor towards Maritime Casualties. Constanta Marit. Univ. Ann. 2010, 13, 3–29. [Google Scholar]
- Squire, D. The Human Element in Shipping. In Alert! The International Maritime Human Element Bulletin; The Nautical Institute and Lloyd’s Register: London, UK, 2013; p. 20. [Google Scholar]
- Singh, M. A Chief Engineer Explains the Importance of Situational Awareness Using Real Life Incidences. Marine Insight. Available online: https://www.marineinsight.com/marine-safety/a-chief-engineer-explains-the-importance-of-situational-awareness-using-real-life-incidences/ (accessed on 2 April 2019).
- Sandhaland, H.; Oltedal, H.; Eid, J. Situation Awareness in Bridge Operations—A Study of Collisions between Attendant Vessels and Offshore Facilities in the North Sea. Saf. Sci. 2015, 79, 277–285. [Google Scholar] [CrossRef]
- Kooij, C.; Loonstijn, M.; Hekkenberg, R.; Visser, K. Towards Autonomous Shipping: Operational Challenges of Unmanned Short Sea Cargo Vessels. In Proceedings of the 13th International Marine Design Conference (IMDC 2018), Helsinki, Finland, 10–14 June 2018; ResearchGate: Berlin, Germany; Taylor & Francis Group: Milton Park, Oxfordshire, UK, 2018; Volume 2, pp. 871–880. [Google Scholar]
- Matthews, C. Unmanned “Ghost” Ships Are Coming. Available online: http://theconversation.com/unmanned-ghost-ships-are-coming-83324 (accessed on 21 May 2020).
- Allianz Global Corporate & Specialty. Shipping Safety–Human Error Comes in Many Forms. Available online: https://www.agcs.allianz.com/news-and-insights/expert-risk-articles/human-error-shipping-safety.html (accessed on 30 May 2020).
- Allianz Global Corporate & Specialty. Allianz Report: Companies Face Rising Liability Losses around Environmental, Cyber, Product Defect and Recall Risks. Available online: https://www.agcs.allianz.com/news-and-insights/news/global-claims-review-2017.html (accessed on 15 April 2019).
- Punch, K.F. Survey Research: The Basics; Sage Publications: London, UK, 2003; ISBN 1-4462-0495-2. [Google Scholar]
- Kretschmann, L.; Rodseth, O.; Tjora, A.; Fuller, B.S.; Noble, H.; Horahan, J. Maritime Unmanned Navigation through Intelligence in Networks Funding Scheme: SST.2012.5.2-5: E-Guided Vessels: The ‘Autonomous’ Ship; Qualitative Assessment, MUNIN: Hamburg, Germany, 2015. [Google Scholar]
- Bernard, H.R. Social Research Methods: Qualitative and Quantitative Approaches, 2nd ed.; SAGE: Thousand Oaks, CA, USA, 2013; ISBN 978-1-4129-7854-5. [Google Scholar]
- Maguire, M.; Delahunt, B. Doing a Thematic Analysis: A Practical, Step-by-Step Guide for Learning and Teaching Scholars. Irel. J. High. Educ. 2017, 9, 14. [Google Scholar]
- Clarke, V.; Braun, V. Teaching Thematic Analysis: Overcoming Challenges and Developing Strategies for Effective Learning. Psychologist 2013, 26, 120–123. [Google Scholar]
- Clifford, N.; Cope, M.; Gillespie, T.; French, S.; Longhurst, R. Key Methods in Geography, 3rd ed.; SAGE: Thousand Oaks, CA, USA, 2016; ISBN 978-1-4739-0897-0. [Google Scholar]
- Emad, G.R.; Khabir, M.; Shahbakhsh, M. Shipping 4.0 and Training Seafarers for the Future Autonomous and Unmanned Ships. In Proceedings of the 21th Marine Industries Conference (MIC2019), Qeshm Island, Iran, 1–2 January 2020. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
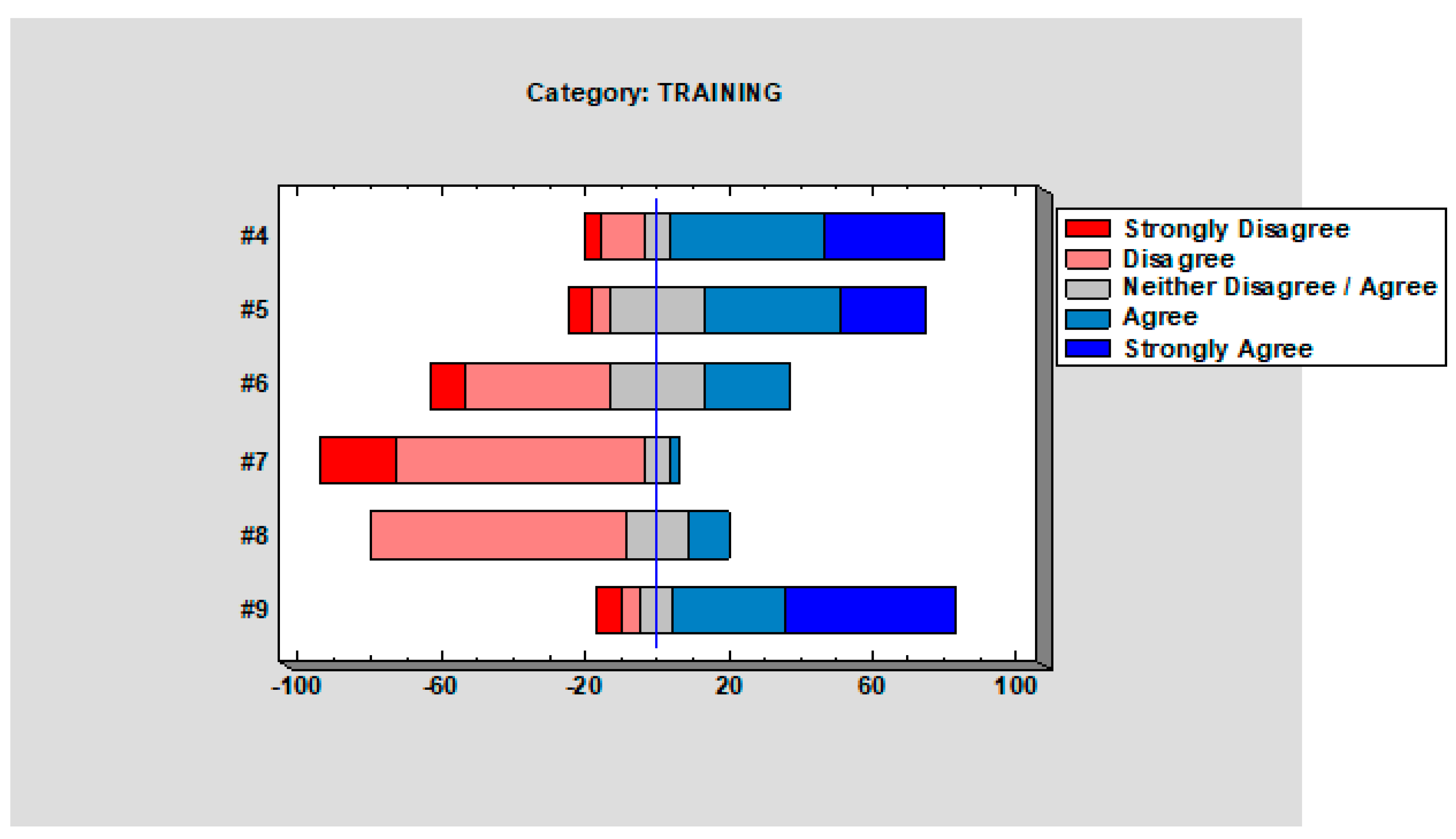
| Question Number | Training Category Survey Questions | Mean & Median Answer |
|---|---|---|
| 4 | The skill sets required for Licensed Deck Officers will significantly change in the future due to autonomous shipping | AGREE |
| 5 | Licensed Deck Officer training will change significantly in the next 10 years by the onset of autonomous shipping | AGREE |
| 6 | Current sailing Licensed Deck Officers are adequately prepared for industry changes due to autonomous shipping | NEITHER DISAGREE/AGREE |
| 7 | Current Shipping Companies, Unions, and Merchant Mariner educational facilities are adequately prepared for industry changes regarding autonomous shipping | DISAGREE |
| 8 | Current midshipmen/cadets training are adequately prepared for industry changes regarding autonomous shipping | DISAGREE |
| 9 | Shore side control centers that will remotely control vessels will require operators who possess the experience and credentials similar to current Licensed Deck Officers | AGREE |
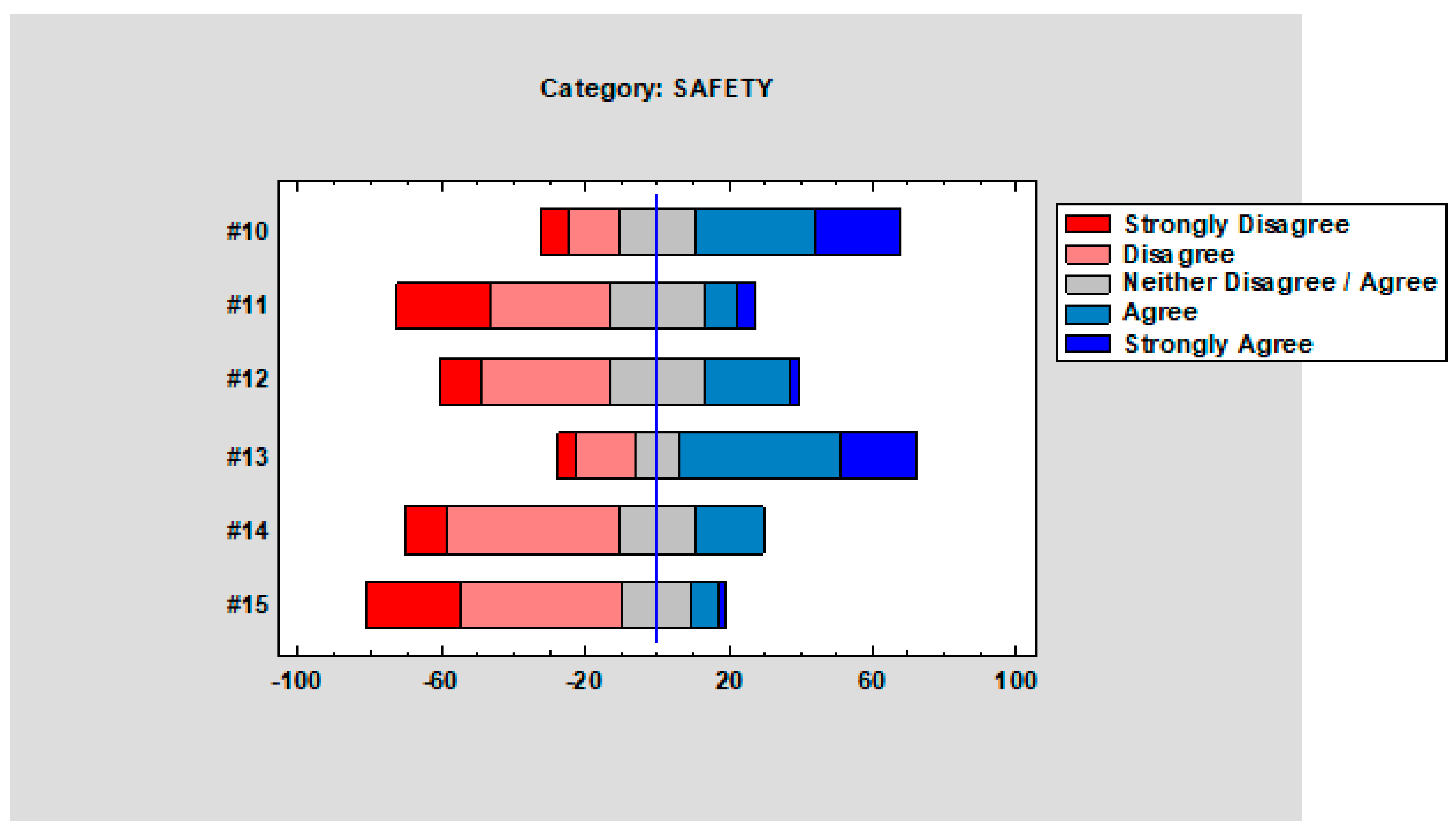
| Question Number | Safety Category Survey Questions | Mean & Median Answer |
|---|---|---|
| 10 | Reducing Licensed Deck Officers onboard vessels with a proportional increase of automation will increase sensor over-reliance and increase information overflow for the Deck Officers | AGREE |
| 11 | Reducing Licensed Deck Officers onboard vessels with a proportional increase of automation will reduce the percentage of navigational accidents | DISAGREE |
| 12 | Reducing Licensed Deck Officers onboard with a proportional increase of automation will reduce human fatigue | NEITHER DISAGREE/AGREE |
| 13 | Reducing the amount of Licensed Deck Officers onboard with a proportional increase of automation will increase Deck Officer complacency | AGREE |
| 14 | Reducing the amount of Licensed Deck Officers onboard with a proportional increase of automation will decrease the daily duties and demands of the Deck Officer | DISAGREE |
| 15 | Reducing the amount of Licensed Deck Officers onboard with a proportional increase of automation is safe | DISAGREE |
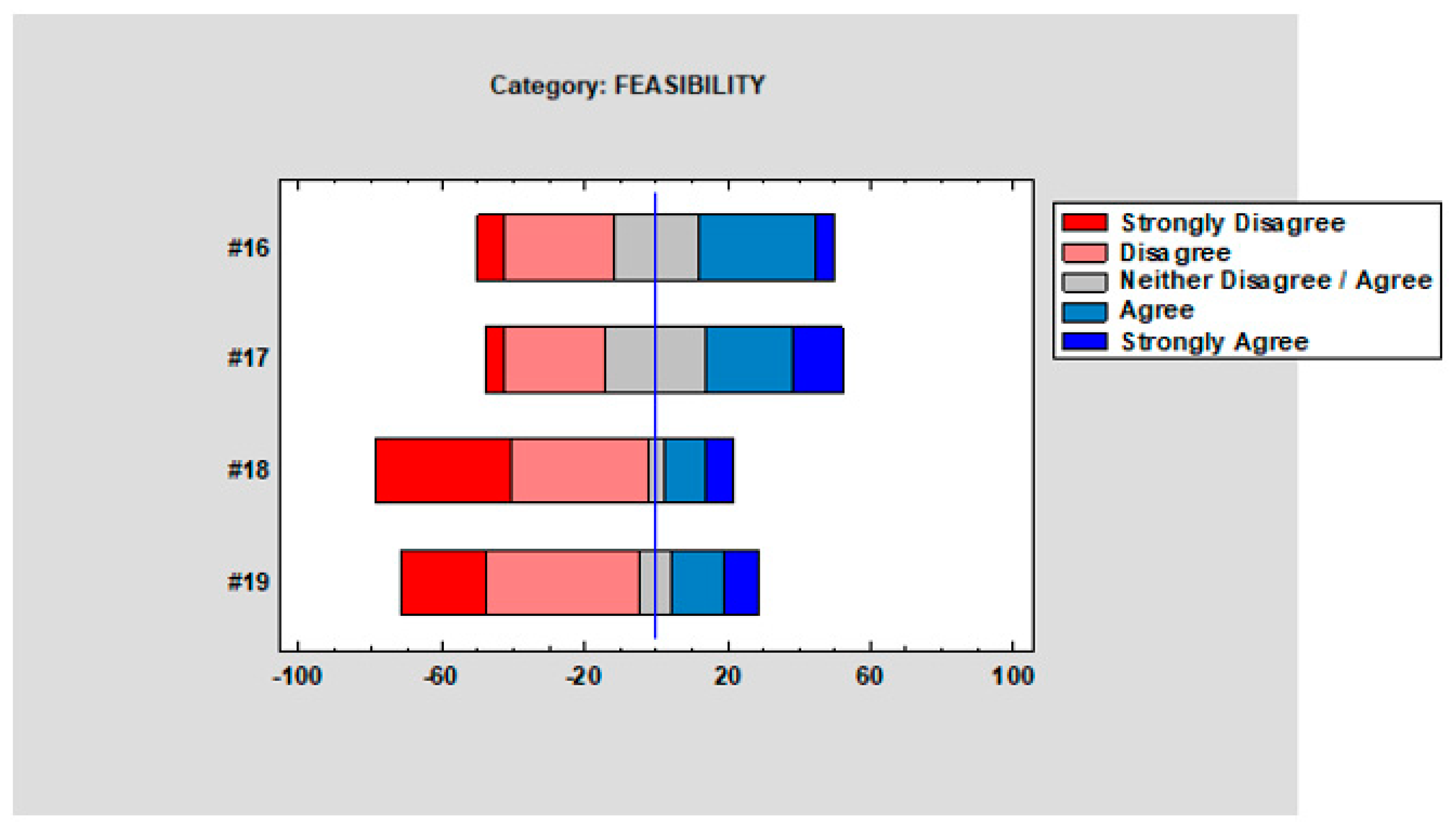
| Question Number | Feasibility Category Survey Questions | Mean & Median Answer |
|---|---|---|
| 16 | Reducing the amount of Licensed Deck Officers onboard with a proportional increase of automation is feasible | NEITHER DISAGREE/AGREE |
| 17 | Reducing the amount of Licensed Deck Officers onboard with a proportional increase of automation is economical | NEITHER DISAGREE/AGREE |
| 18 | Onboard situational awareness can be effectively replicated with advances in simulation | DISAGREE |
| 19 | In the future, vessels have a practical potential to be safely operational as fully autonomous | DISAGREE |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hannaford, E.; Hassel, E.V. Risks and Benefits of Crew Reduction and/or Removal with Increased Automation on the Ship Operator: A Licensed Deck Officer’s Perspective. Appl. Sci. 2021, 11, 3569. https://doi.org/10.3390/app11083569
Hannaford E, Hassel EV. Risks and Benefits of Crew Reduction and/or Removal with Increased Automation on the Ship Operator: A Licensed Deck Officer’s Perspective. Applied Sciences. 2021; 11(8):3569. https://doi.org/10.3390/app11083569
Chicago/Turabian StyleHannaford, Elspeth, and Edwin Van Hassel. 2021. "Risks and Benefits of Crew Reduction and/or Removal with Increased Automation on the Ship Operator: A Licensed Deck Officer’s Perspective" Applied Sciences 11, no. 8: 3569. https://doi.org/10.3390/app11083569
APA StyleHannaford, E., & Hassel, E. V. (2021). Risks and Benefits of Crew Reduction and/or Removal with Increased Automation on the Ship Operator: A Licensed Deck Officer’s Perspective. Applied Sciences, 11(8), 3569. https://doi.org/10.3390/app11083569