
Fault Current and Voltage Estimation for Pole-to-Pole Faults in Modular Multilevel Converter Based DC Grids Considering AC Active Power



Abstract
1. Introduction
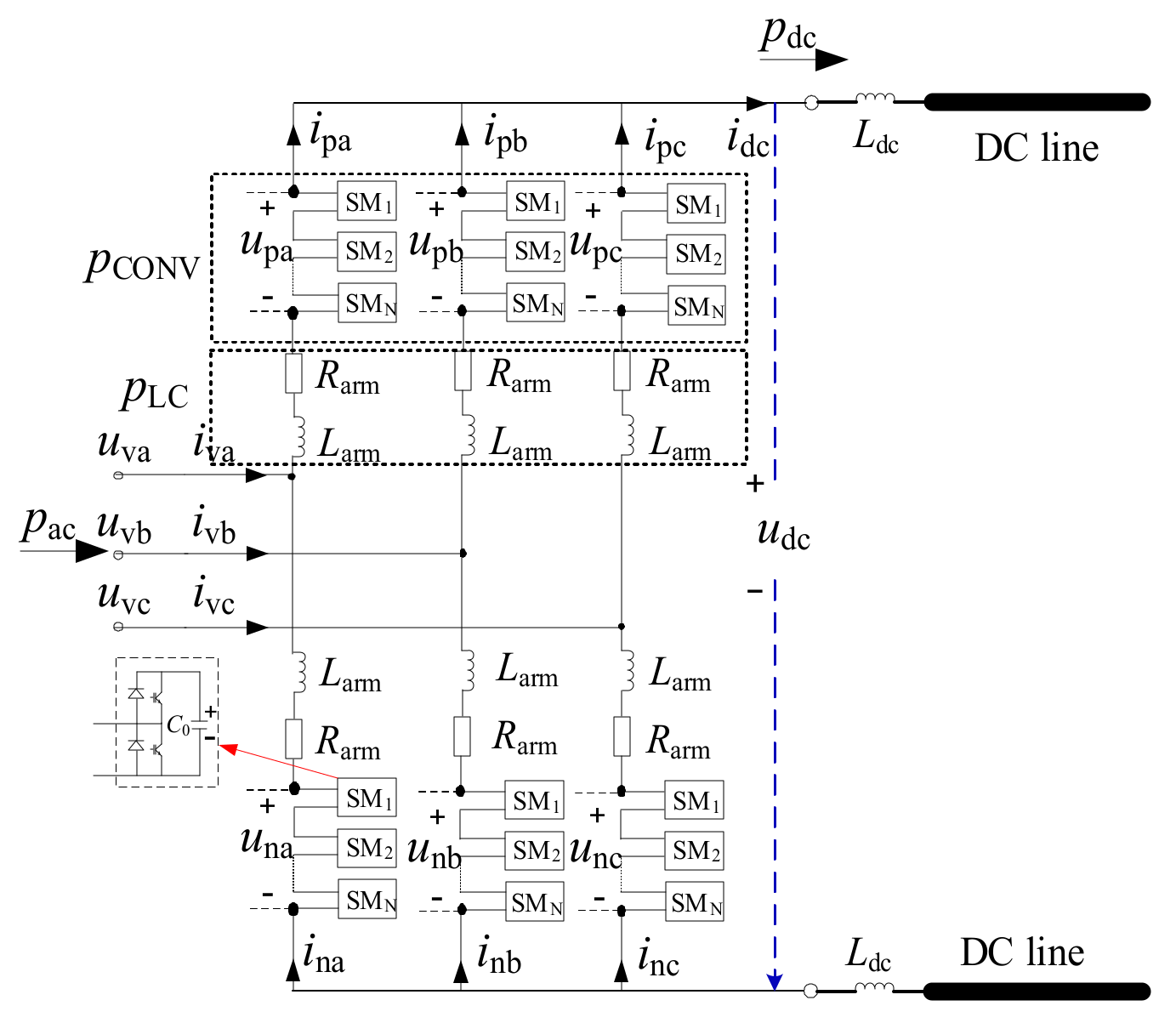
2. The Equivalent Model of MMC Considering AC Side Power and MMC Control
2.1. The Impact of AC Active Power and MMC Controllers
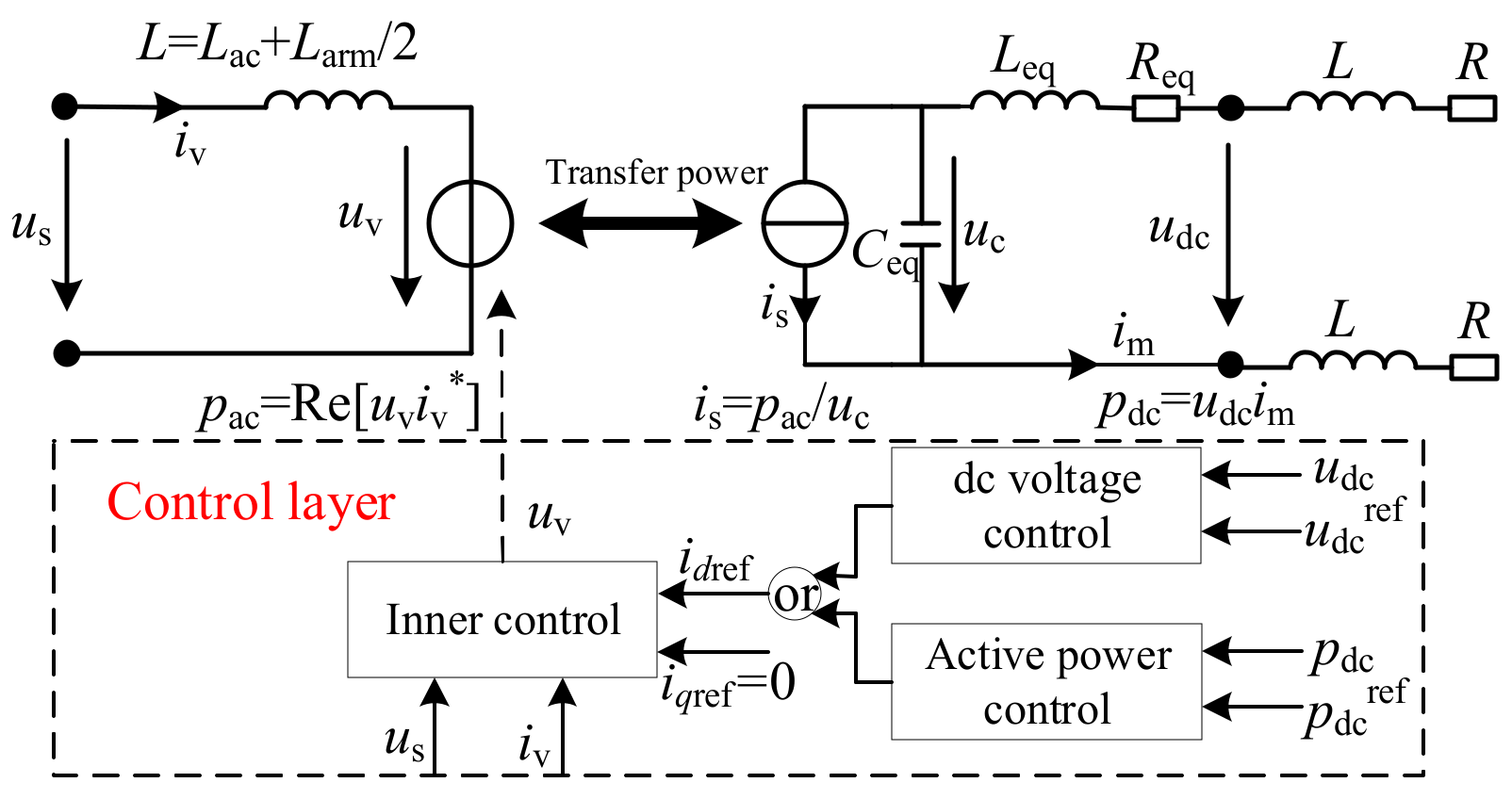
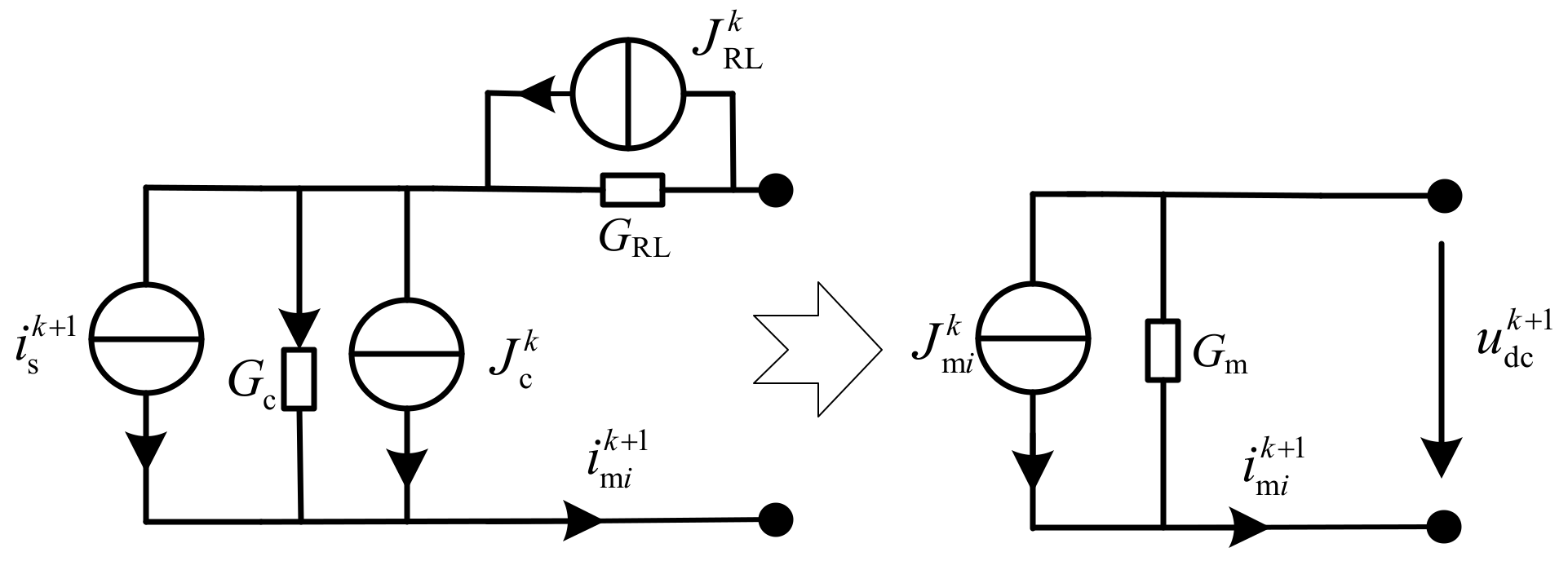
2.2. The Equivalent MMC Model Considering AC Active Power and MMC Controllers
2.3. The Model of MMC Controllers
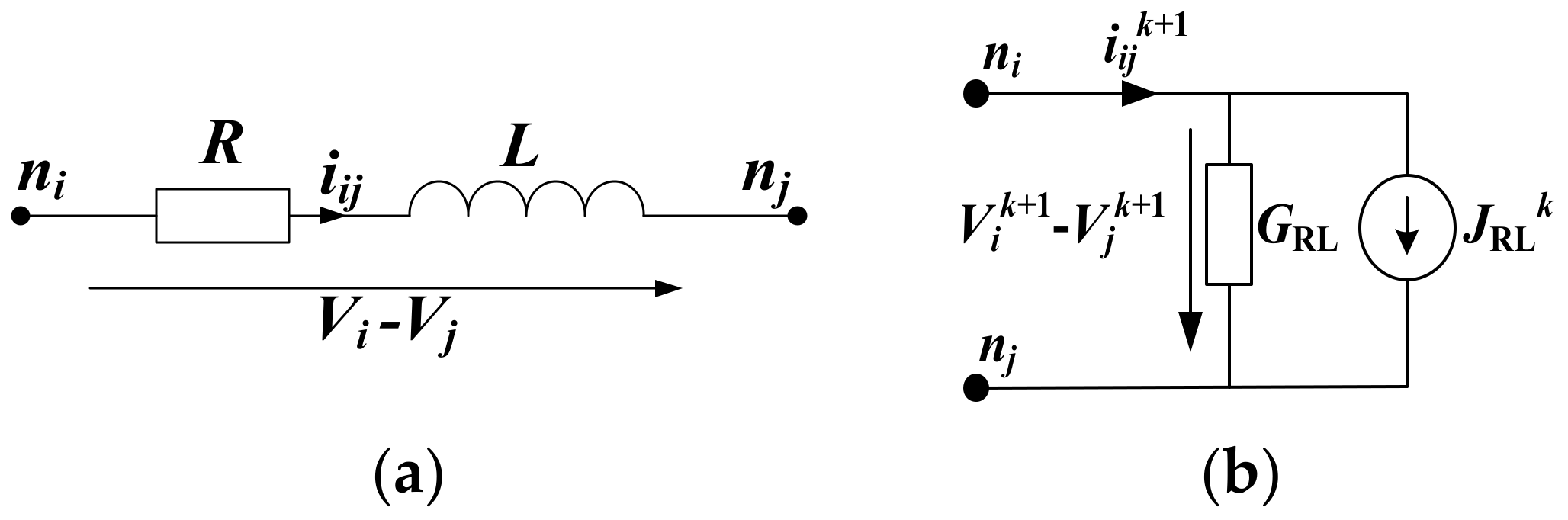
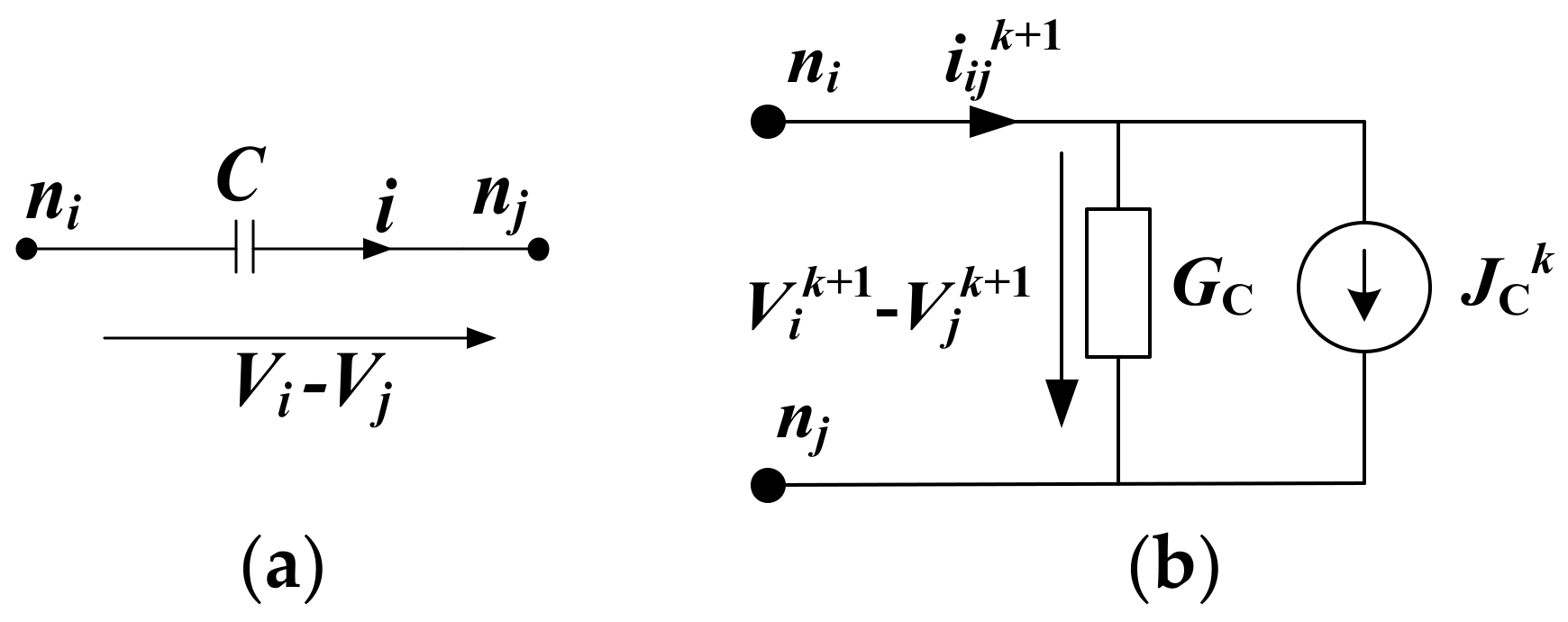
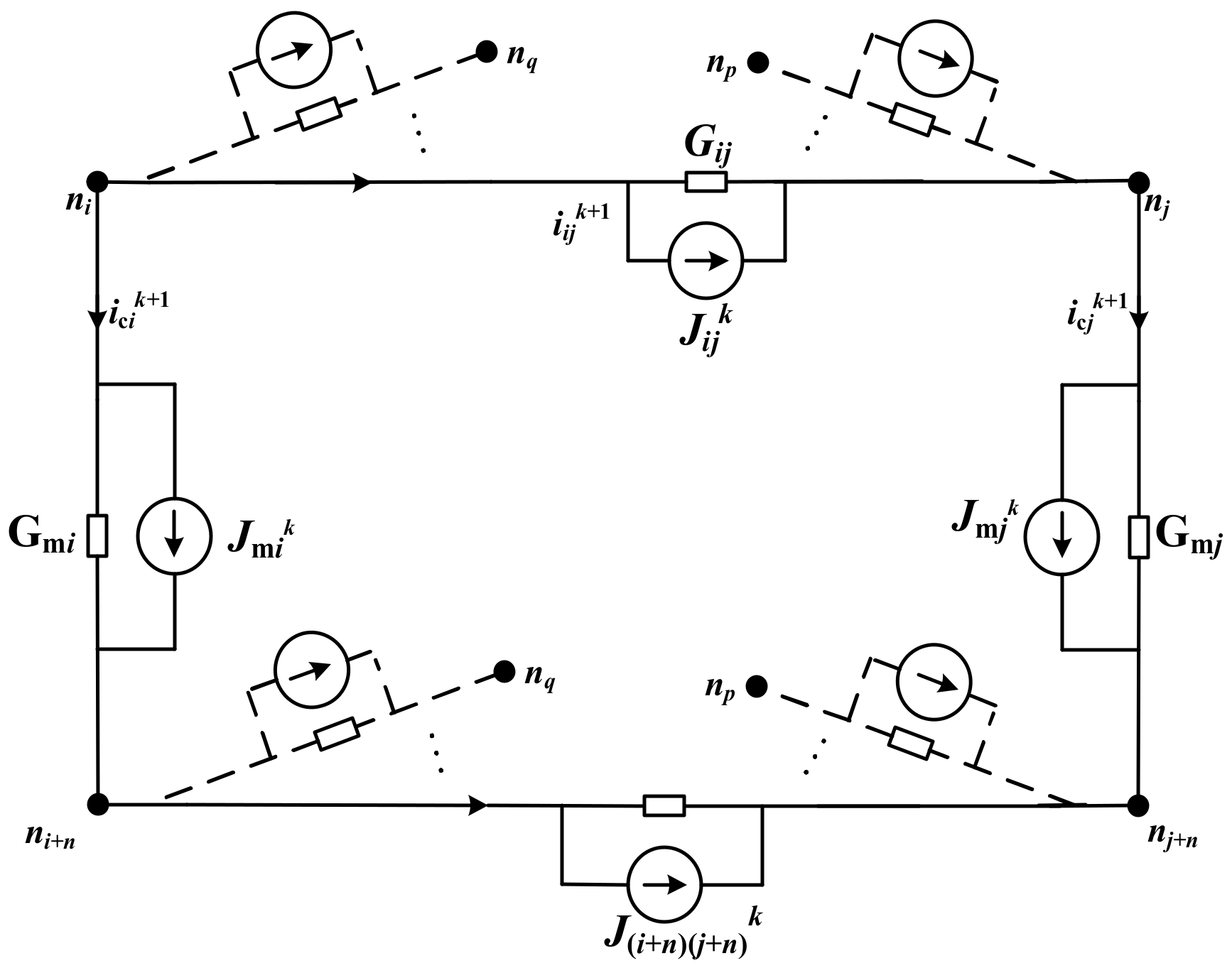
3. Discrete Adjoint Model of DC Grid
4. Short-Circuit Characteristic Calculation Method
4.1. Node Voltage Equations for the Pre-Fault DC Grid
- (1)
- Diagonal elements: The diagonal elements in G0 are the sum of admittances on branches directly connected to nodes, that is
- (2)
- Non-diagonal elements: The meaning of the non-diagonal elements is the negative value of the admittances of the branches directly connected to the two nodes.
4.2. Modification of the Matrices for the Fault DC Grid
5. Case Study
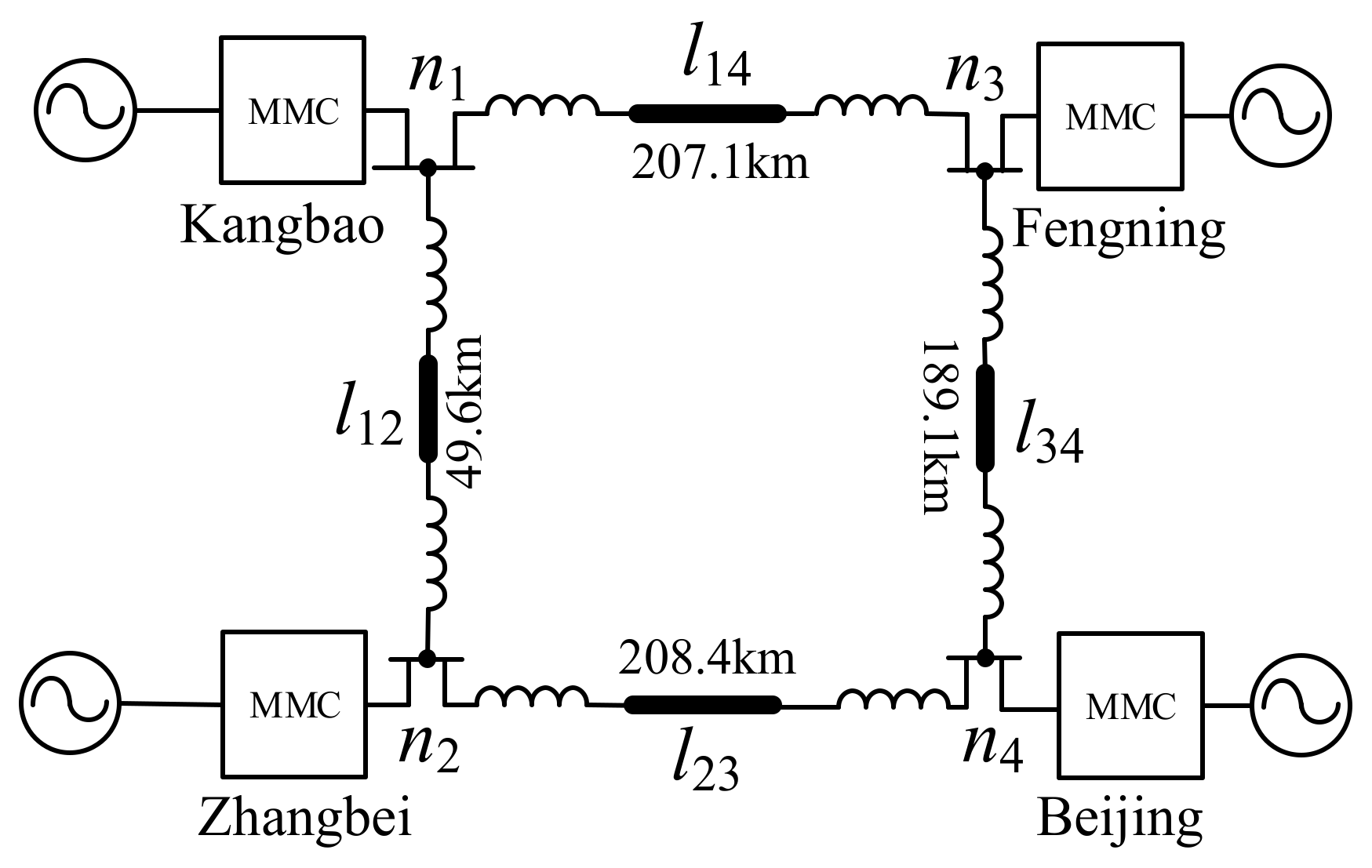
5.1. Description of the Test System
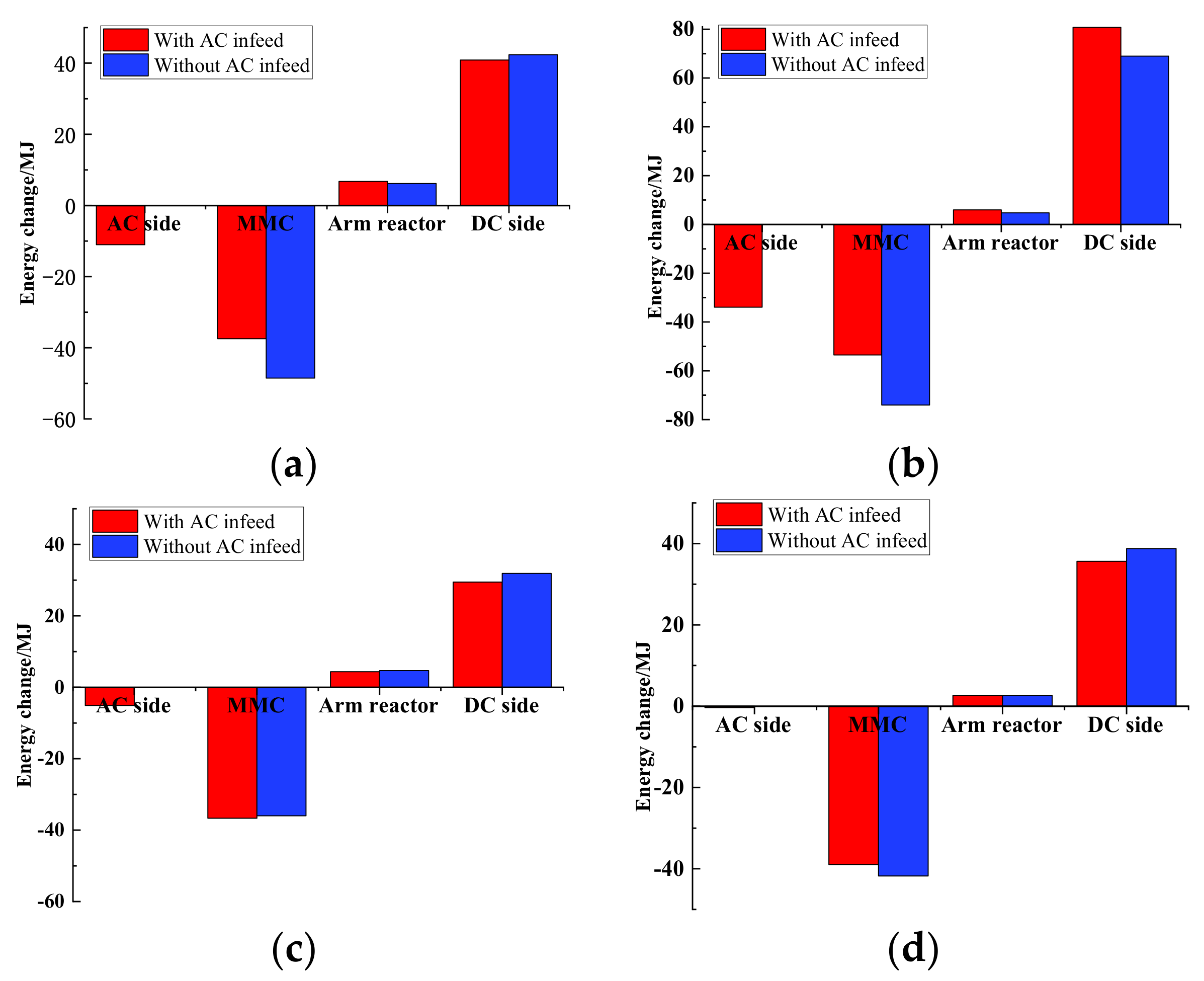
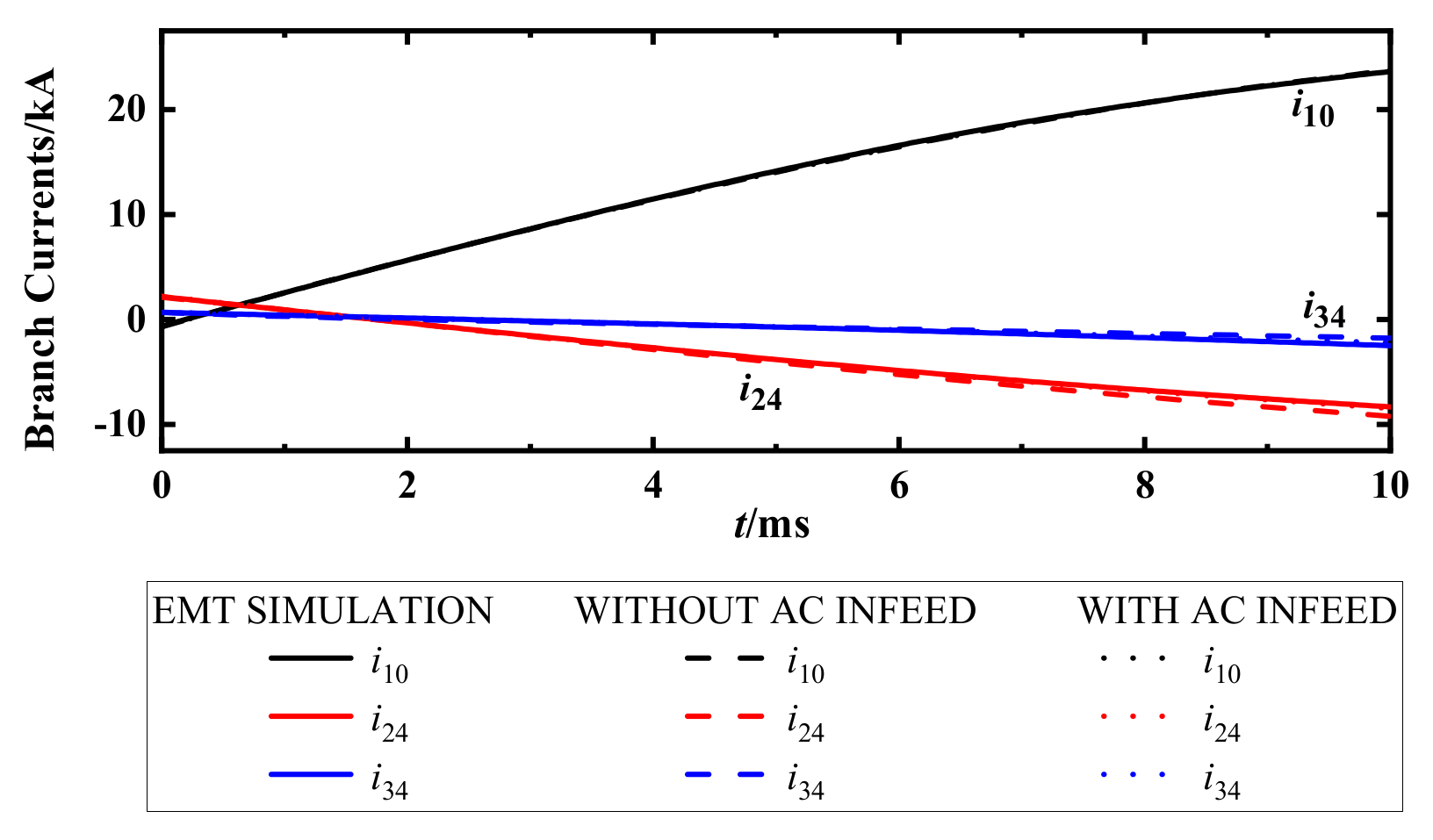
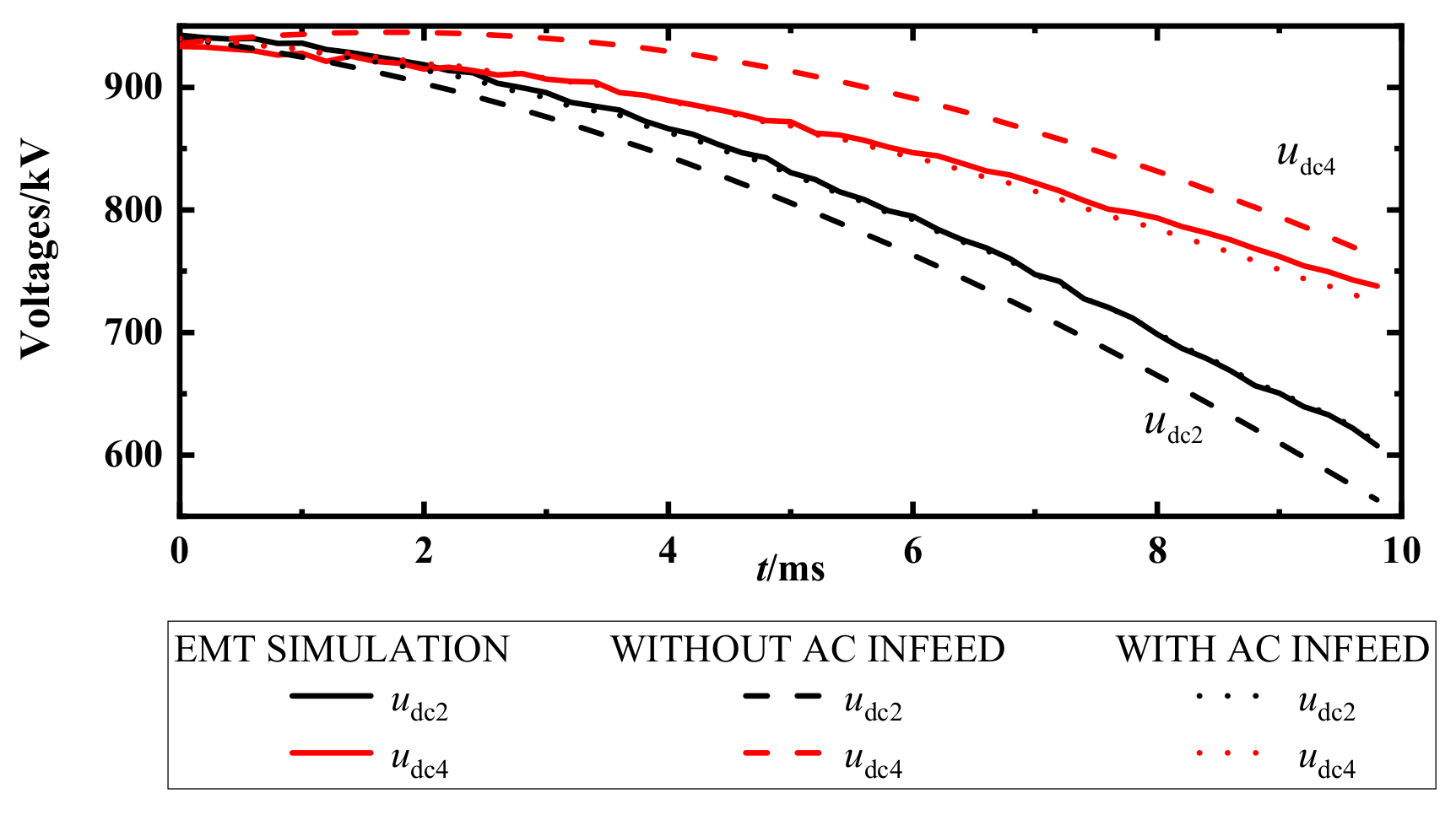
5.2. Influence of the AC Infeed
5.3. Accuracy Validation of the Proposed Method
5.4. Accuracy Enhancement of the Presented Method
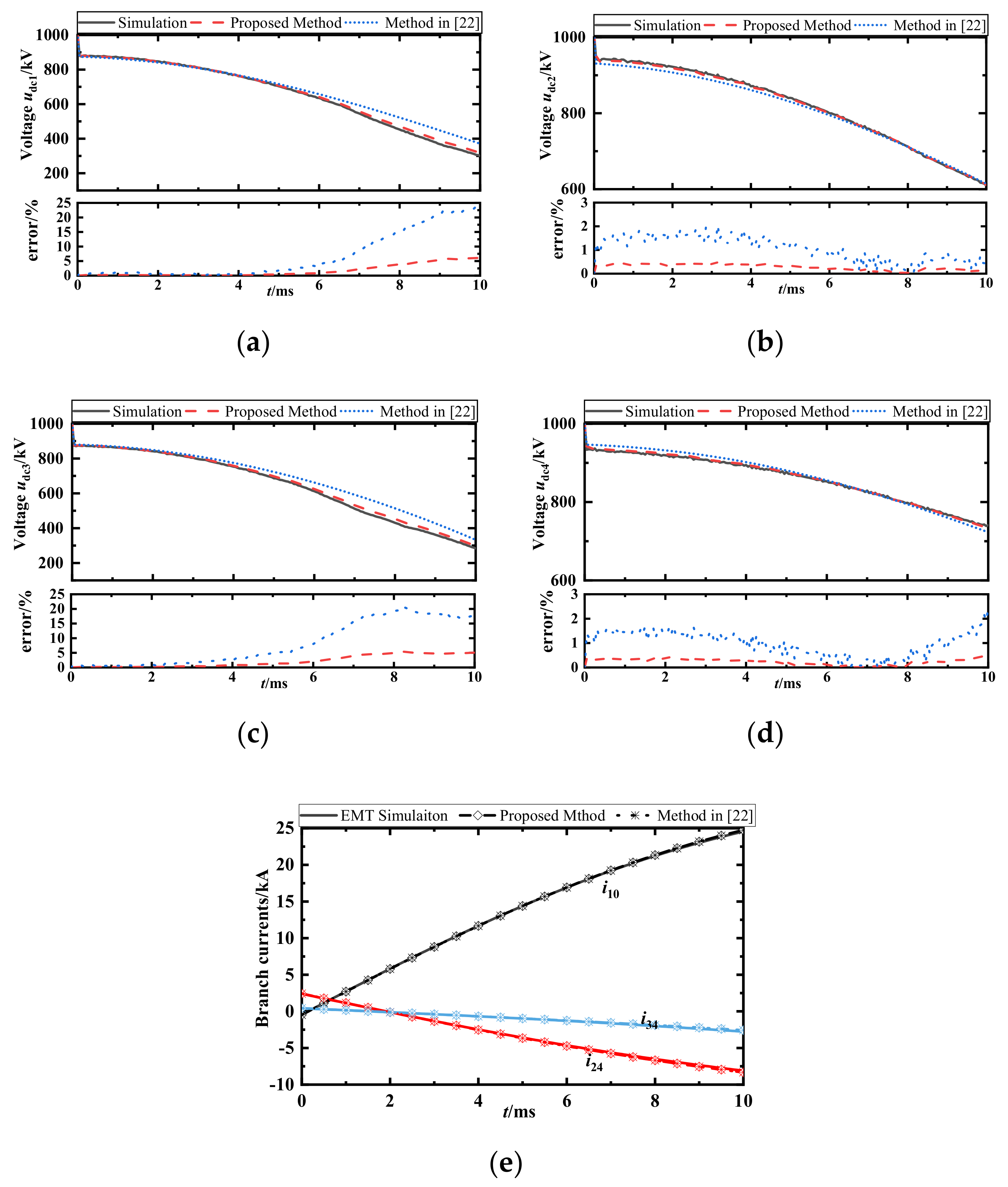
5.4.1. Pole-to-Pole Fault Near Station s1 under Constant Active Power Control
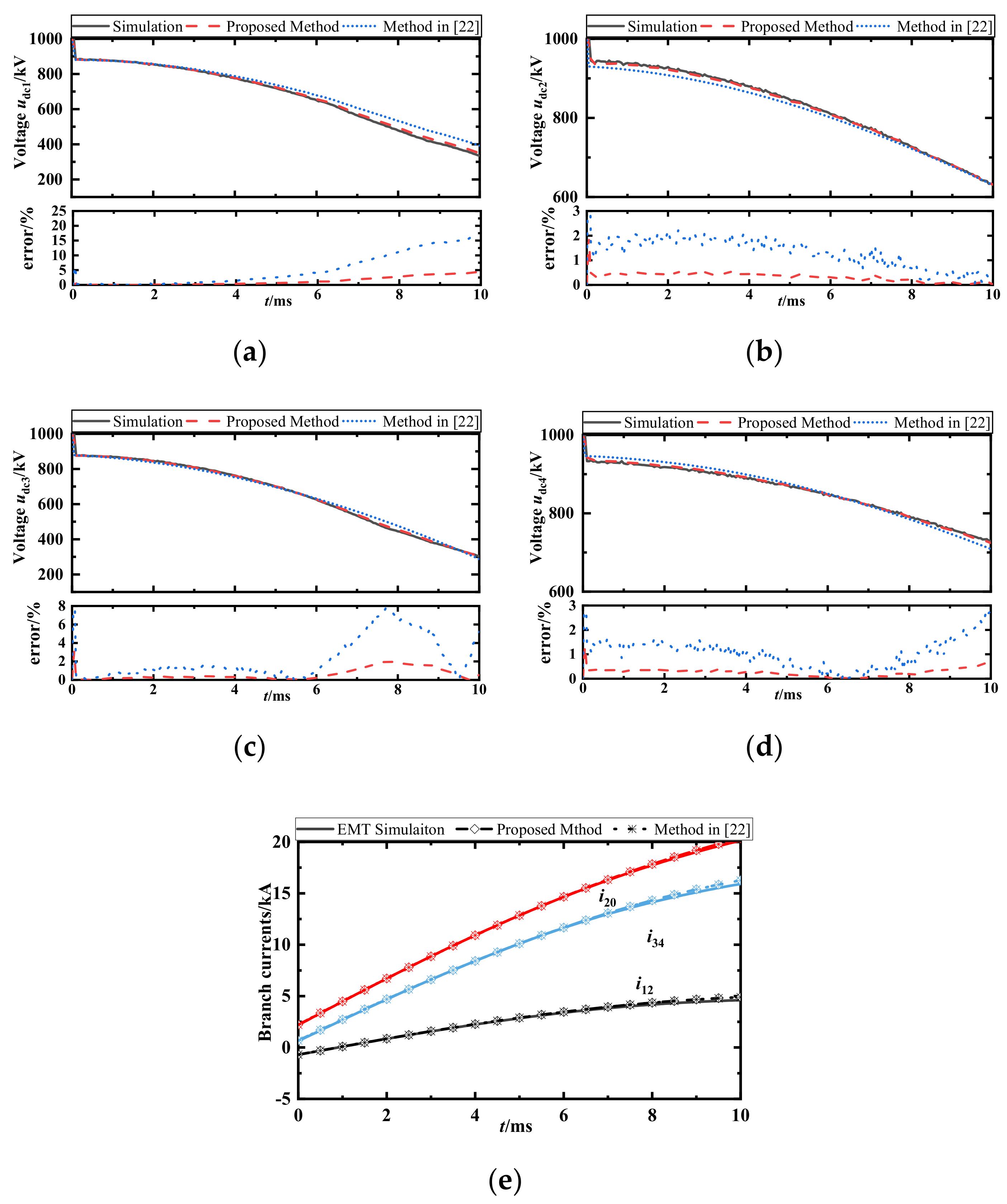
5.4.2. Pole-to-Pole Fault Near Station s4 under Constant DC Voltage Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nami, A.; Liang, J.; Dijkhuizen, F.; Demetriades, G.D. Modular multilevel converters for HVDC applications: Review on converter cells and functionalities. IEEE Trans. Power Electron. 2015, 30, 18–36. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Li, J.; Xu, X.; Liu, W. Comparative analysis of multilevel-high-frequency-link and multilevel-DC-link DC-DC transformers based on MMC and dual-active-bridge for MVDC application. IEEE Trans. Power Electron. 2018, 33, 2035–2049. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, M.; Ran, L. A compact MMC submodule structure with reduced capacitor size using the stacked switched capacitor architecture. IEEE Trans. Power Electron. 2016, 31, 6920–6936. [Google Scholar]
- Xu, Z. Modular Multilevel Converter-Based High Voltage DC Power Transmission Systems, 2nd ed.; China Machine Press: Beijing, China, 2016; pp. 378–380. [Google Scholar]
- Bucher, M.K.; Wiget, R.; Andersson, G.; Frank, M.C. Multiterminal HVDC networks—What is the preferred topology? IEEE Trans. Power Del. 2014, 29, 406–413. [Google Scholar] [CrossRef]
- Liu, G.; Xu, F.; Xu, Z.; Zhang, Z.; Tang, G. Assembly HVDC breaker for HVDC grids with modular multilevel converters. IEEE Trans. Power Electron. 2017, 32, 931–941. [Google Scholar] [CrossRef]
- Mokhberdoran, A.; Hertem, D.V.; Silva, N.; Leite, H.; Carvalho, A. Multi-port hybrid HVDC circuit breaker. IEEE Trans. Ind. Electron. 2017, 65, 309–320. [Google Scholar] [CrossRef]
- Shukla, A.; Demetriades, G. A survey on hybrid circuit-breaker topolo-gies. IEEE Trans. Power Del. 2015, 30, 627–641. [Google Scholar] [CrossRef]
- Shi, J.; Tang, Y.; Chen, L. The application of active superconducting DC fault current limiter in hybrid AC/DC power supply systems. IEEE Trans. Appl. Supercond. 2008, 18, 672–675. [Google Scholar]
- Li, C.; Gole, A.M.; Zhao, C. A fast dc fault detection method using dc reactor voltages in HVDC grids. IEEE Trans. Power Del. 2018, 33, 2254–2264. [Google Scholar] [CrossRef]
- Bucher, M.K.; Franck, C.M. Contribution of fault current sources in multi-terminal HVDC cable networks. IEEE Trans. Power Del. 2013, 28, 1796–1803. [Google Scholar] [CrossRef]
- Han, X.; Sima, W.; Yang, M.; Li, L.; Yuan, T.; Si, Y. Transient characteristics under ground and short-circuit faults in a ±500 kV MMC-based HVDC system with hybrid dc circuit breakers. IEEE Trans. Power Del. 2018, 33, 1378–1387. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, Z. Short-circuit current calculation and performance requirement of HVDC breakers for MMC-MTDC systems. IEEE Trans. Electr. Electron. Eng. 2016, 11, 168–177. [Google Scholar] [CrossRef]
- Tünnerhoff, P.; Ruffing, P.; Schnettler, A. Comprehensive fault type discrimination concept for bipolar full-bridge-based MMC HVDC sys-tems with dedicated metallic return. IEEE Trans. Power Del. 2018, 33, 330–339. [Google Scholar] [CrossRef]
- Li, C.; Zhao, C.; Xu, J.; Ji, Y.; Zhang, F. An A pole-to-pole short circuit fault current calculation method for dc grids. IEEE Trans. Power Syst. 2017, 32, 4943–4953. [Google Scholar] [CrossRef]
- Liu, S.; Xu, Z.; Hua, W.; Tang, G.; Xue, Y. Electromechanical transient modeling of modular multilevel converter based multi-terminal HVDC systems. IEEE Trans. Power Syst. 2014, 29, 72–83. [Google Scholar] [CrossRef]
- Li, Y.; Tang, G.; Ge, J.; He, Z.; Pang, H.; Yang, J.; Wu, Y. Modeling and damping control of modular multilevel converter based dc grid. IEEE Trans. Power Syst. 2018, 33, 723–735. [Google Scholar] [CrossRef]
- Li, R.; Xu, L.; Holliday, D.; Page, F.; Finney, S.J.; Williams, B.W. Continuous operation of radial multiterminal HVDC systems under dc fault. IEEE Trans. Power Del. 2016, 31, 351–361. [Google Scholar] [CrossRef]
- Eriksson, R. Current sharing in multi-terminal dc grids—The analytical approach. IEEE Trans. Power Syst. 2018, 33, 6278–6288. [Google Scholar] [CrossRef]
- Tang, L.; Dong, X. An approximate method for the calculation of transmission line fault current in MMC-HVDC grid. Proc. CSEE 2019, 39, 178–186. [Google Scholar]
- Duan, G.; Wang, Y.; Yin, T.; Yin, S.; Li, G.; Sun, S. DC short circuit current calculation for modular multilevel converter. Power Syst. Technol. 2018, 42, 2145–2152. [Google Scholar]
- Langwasser, M.; Carne, G.D.; Liserre, M.; Biskoping, M. Fault current estimation in multi-terminal HVdc grids considering MMC control. IEEE Trans. Power Syst. 2019, 34, 2179–2189. [Google Scholar] [CrossRef]
- Langwasser, M.; de Carne, G.; Biskoping, M.L.M. Improved fault current calculation method for pole-to-pole faults in MMC Multi-Terminal HVDC Grids Considering Control Dynamics. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 5529–5535. [Google Scholar]
- Trinh, N.; Zeller, M.; Wuerflinger, K.; Erlich, I. Generic Model of MMC-VSC-HVDC for interaction study with AC power system. IEEE Trans. Power Syst. 2016, 31, 27–34. [Google Scholar] [CrossRef]
- Wang, J.; Bai, H.M.Z. A submodule fault ride-through strategy for modular multilevel converters with nearest level modulation. IEEE Trans. Power Electron. 2018, 33, 1597–1608. [Google Scholar] [CrossRef]
- Shen, K.; Wang, S.; Zhao, D.; Zhao, G. A discrete-time low-frequency-ratio nearest level modulation strategy for modular multilevel converters with small number of power modules. IEEE Access 2019, 7, 25792–25803. [Google Scholar] [CrossRef]
- Liang, Y.; Liu, J.; Zhang, T.; Yang, Q. Arm current control strategy for MMC-HVDC under unbalanced conditions. IEEE Trans. Power Del. 2017, 32, 125–134. [Google Scholar] [CrossRef]
- Li, S.; Wang, X.; Yao, Z.; Li, T.; Peng, Z. Circulating current suppressing strategy for MMC-HVDC based on nonideal proportional resonant controllers under unbalanced grid conditions. IEEE Trans. Power Electron. 2015, 30, 387–397. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Values |
|---|---|
| Converter Stations | |
| Rated AC voltage (kV) | 230 (s1,s3)/525 (s2,s4) |
| Transformer impedance(p.u.) | 0.0176 (s1,s3)/0.0088 (s2,s4) |
| Smoothing reactor(mH) | 300 |
| Rated capacity(MW) | 1500 (s1,s3)/3000 (s2,s4) |
| Rated DC voltage | ±500 kV |
| Arm inductor(mH) | 40 (s1,s3)/75 (s2,s4) |
| SM capacitor(uF) | 10000 (s1,s3)/15000 (s2,s4) |
| Number of SMs per arm | 218 |
| DC transmission lines | |
| Resistance per unit length | 0.009735 Ω/km |
| Inductance per unit length | 0.0176 mH/km |
| Capacitance per unit length | 0.001367 μF/ km |
| Control mode | |
| s1 | Q = 0 MVar, P = −1500 MW |
| s2 | Q = 0 MVar, P = −3000 MW |
| s3 | Q = 0 MVar, P = 1500 MW |
| s4 | Q = 0 MVar, Udc = ±500 kV |
| Item | i10/kA | i20/kA | i13/kA | I24/kA | I34/kA |
| Value | −0.694 | 0.694 | 1.434 | 2.210 | 0.682 |
| Item | udc1/kV | udc2/kV | udc3/kV | udc4/kV | / |
| Value | 1008.72 | 1009.86 | 1002.39 | 1000.00 | / |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, H.; Zhang, J.; Yu, J.; Zhang, Z. Fault Current and Voltage Estimation for Pole-to-Pole Faults in Modular Multilevel Converter Based DC Grids Considering AC Active Power. Appl. Sci. 2021, 11, 2882. https://doi.org/10.3390/app11062882
Cai H, Zhang J, Yu J, Zhang Z. Fault Current and Voltage Estimation for Pole-to-Pole Faults in Modular Multilevel Converter Based DC Grids Considering AC Active Power. Applied Sciences. 2021; 11(6):2882. https://doi.org/10.3390/app11062882
Chicago/Turabian StyleCai, Hui, Junli Zhang, Jingqiu Yu, and Zheren Zhang. 2021. "Fault Current and Voltage Estimation for Pole-to-Pole Faults in Modular Multilevel Converter Based DC Grids Considering AC Active Power" Applied Sciences 11, no. 6: 2882. https://doi.org/10.3390/app11062882
APA StyleCai, H., Zhang, J., Yu, J., & Zhang, Z. (2021). Fault Current and Voltage Estimation for Pole-to-Pole Faults in Modular Multilevel Converter Based DC Grids Considering AC Active Power. Applied Sciences, 11(6), 2882. https://doi.org/10.3390/app11062882