
A Single Assistive Profile Applied by a Passive Hip Flexion Device Can Reduce the Energy Cost of Walking in Older Adults




Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Experimental Design
2.3. Exoband Design
2.4. Exoband Force Setup
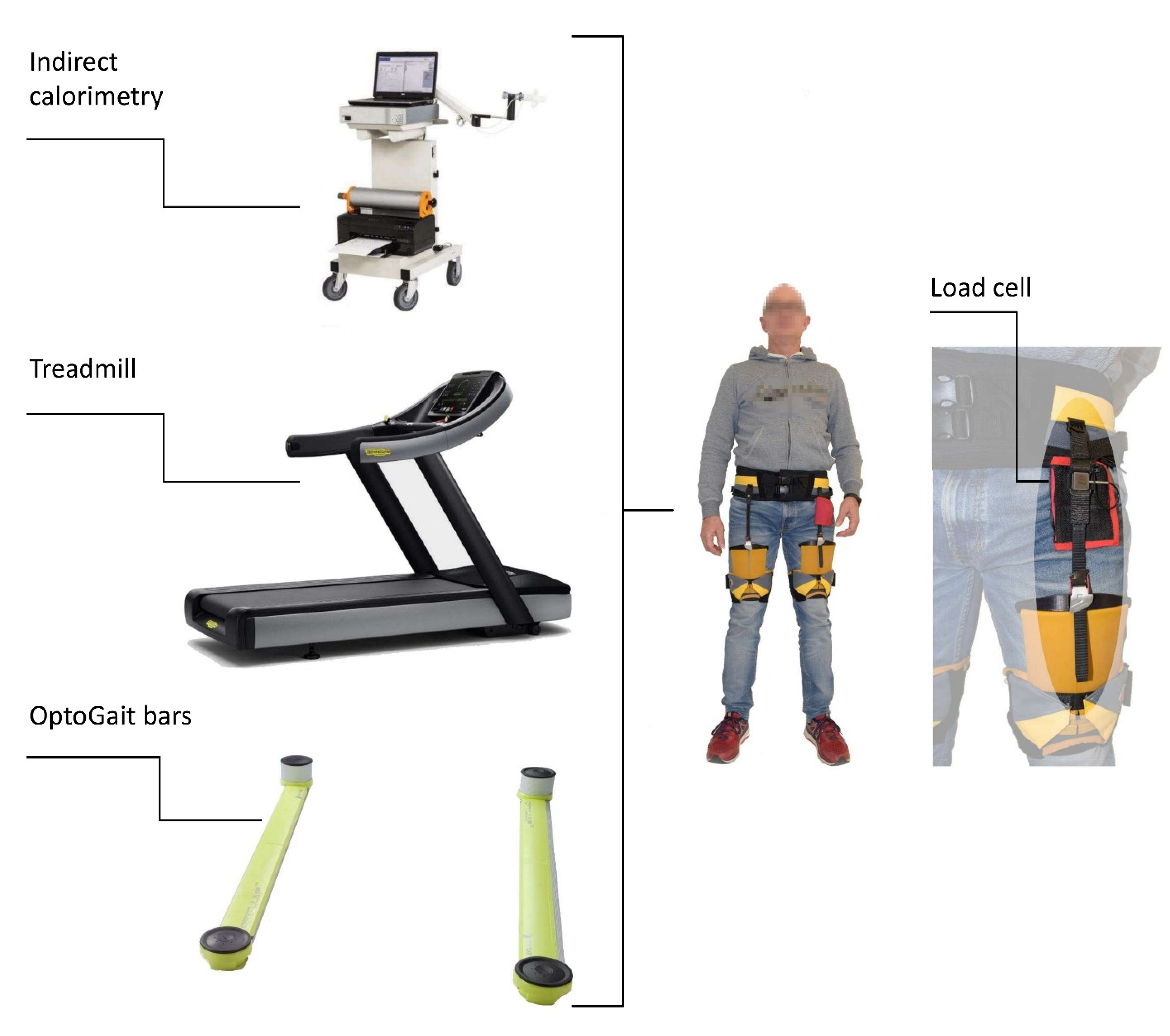
2.5. Data Collection and Analysis
2.6. Statistical Analysis
3. Results
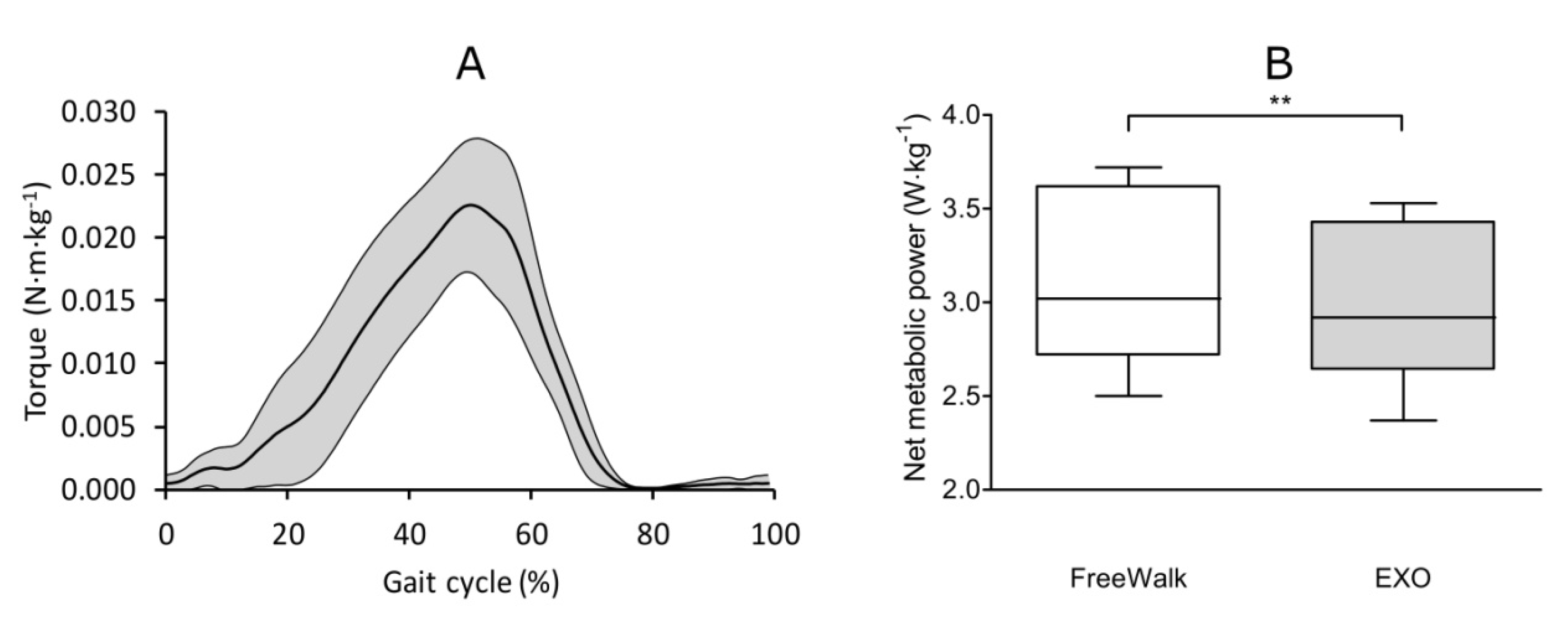
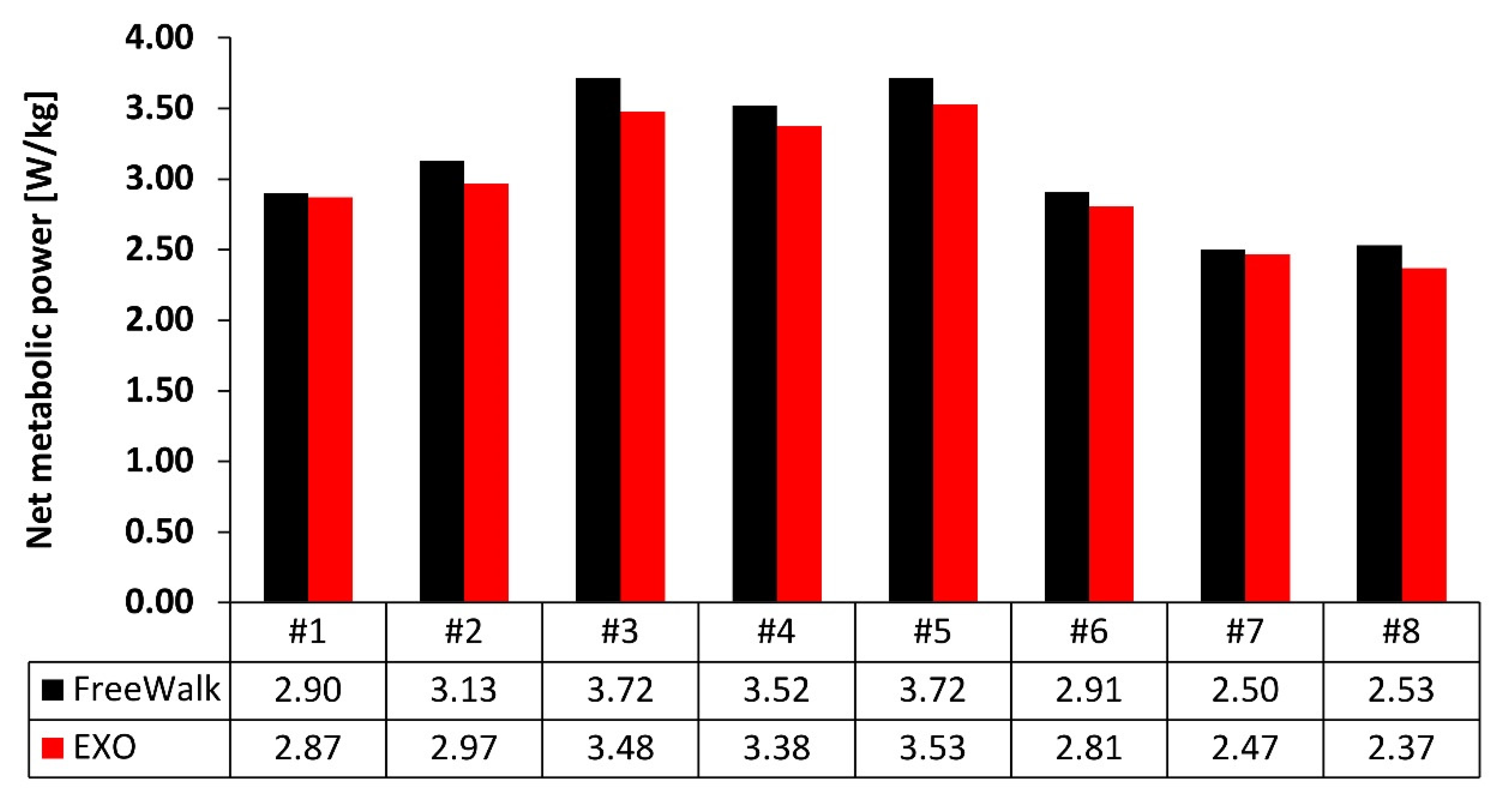
3.1. Metabolic Cost and Spatio-Temporal Parameters
3.2. Torque Assistance
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Studenski, S.; Perera, S.; Patel, K.; Rosano, C.; Faulkner, K.; Inzitari, M.; Brach, J.; Chandler, J.; Cawthon, P.; Connor, E.B.; et al. Gait speed and survival in older adults. JAMA J. Am. Med. Assoc. 2011, 305, 50–58. [Google Scholar] [CrossRef] [PubMed]
- Cesari, M.; Kritchevsky, S.B.; Penninx, B.W.H.J.; Nicklas, B.J.; Simonsick, E.M.; Newman, A.B.; Tylavsky, F.A.; Brach, J.S.; Satterfield, S.; Bauer, D.C.; et al. Prognostic value of usual gait speed in well-functioning older people-Results from the health, aging and body composition study. J. Am. Geriatr. Soc. 2005, 53, 1675–1680. [Google Scholar] [CrossRef] [PubMed]
- Brach, J.S.; VanSwearingen, J.M. Interventions to Improve Walking in Older Adults. Curr. Transl. Geriatr. Exp. Gerontol. Rep. 2013, 2, 230–238. [Google Scholar] [CrossRef] [PubMed]
- Franceschini, M.; Rampello, A.; Agosti, M.; Massucci, M.; Bovolenta, F.; Sale, P. Walking Performance: Correlation between Energy Cost of Walking and Walking Participation. New Statistical Approach Concerning Outcome Measurement. PLoS ONE 2013, 8. [Google Scholar] [CrossRef] [PubMed]
- Schrack, J.A.; Simonsick, E.M.; Ferrucci, L. The energetic pathway to mobility loss: An emerging new framework for longitudinal studies on aging. J. Am. Geriatr. Soc. 2010, 58, S329. [Google Scholar] [CrossRef]
- Wert, D.M.; Brach, J.S.; Perera, S.; VanSwearingen, J. The association between energy cost of walking and physical function in older adults. Arch. Gerontol. Geriatr. 2013, 57, 198–203. [Google Scholar] [CrossRef]
- Fritz, S.; Lusardi, M. White paper: “walking speed: The sixth vital sign”. J. Geriatr. Phys. Ther. 2009, 32, 2–5. [Google Scholar] [CrossRef]
- Giovacchini, F.; Vannetti, F.; Fantozzi, M.; Cempini, M.; Cortese, M.; Parri, A.; Yan, T.; Lefeber, D.; Vitiello, N. A light-weight active orthosis for hip movement assistance. In Proceedings of the Robotics and Autonomous Systems; Elsevier: Amsterdam, The Netherlands, 2015; Volume 73, pp. 123–134. [Google Scholar]
- Mooney, L.M.; Rouse, E.J.; Herr, H.M. Autonomous exoskeleton reduces metabolic cost of human walking. J. Neuroeng. Rehabil. 2014, 11. [Google Scholar] [CrossRef]
- Panizzolo, F.A.; Galiana, I.; Asbeck, A.T.; Siviy, C.; Schmidt, K.; Holt, K.G.; Walsh, C.J. A biologically-inspired multi-joint soft exosuit that can reduce the energy cost of loaded walking. J. Neuroeng. Rehabil. 2016, 13. [Google Scholar] [CrossRef]
- Collins, S.H.; Bruce Wiggin, M.; Sawicki, G.S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef]
- Seo, K.; Lee, J.; Lee, Y.; Ha, T.; Shim, Y. Fully autonomous hip exoskeleton saves metabolic cost of walking. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 4628–4635. [Google Scholar]
- Etenzi, E.; Borzuola, R.; Grabowski, A.M. Passive-elastic knee-ankle exoskeleton reduces the metabolic cost of walking. J. Neuroeng. Rehabil. 2020, 17. [Google Scholar] [CrossRef]
- Nasiri, R.; Ahmadi, A.; Ahmadabadi, M.N. Reducing the energy cost of human running using an unpowered exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 2026–2032. [Google Scholar] [CrossRef]
- Panizzolo, F.A.; Bolgiani, C.; Di Liddo, L.; Annese, E.; Marcolin, G. Reducing the energy cost of walking in older adults using a passive hip flexion device. J. Neuroeng. Rehabil. 2019, 16, 1–9. [Google Scholar] [CrossRef]
- Panizzolo, F.A.; Cimino, S.; Pettenello, E.; Belfiore, A.; Petrone, N.; Marcolin, G. Effect of a passive hip exoskeleton on walking distance in neurological patients. Assist. Technol. 2021. [Google Scholar] [CrossRef]
- Sawicki, G.S.; Beck, O.N.; Kang, I.; Young, A.J. The exoskeleton expansion: Improving walking and running economy. J. Neuroeng. Rehabil. 2020, 17, 25. [Google Scholar] [CrossRef] [PubMed]
- Panizzolo, F.A.; Freisinger, G.M.; Karavas, N.; Eckert-Erdheim, A.M.; Siviy, C.; Long, A.; Zifchock, R.A.; LaFiandra, M.E.; Walsh, C.J. Metabolic cost adaptations during training with a soft exosuit assisting the hip joint. Sci. Rep. 2019, 9. [Google Scholar] [CrossRef]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1283. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Kim, M.; Kuindersma, S.; Walsh, C.J. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Sci. Robot. 2018, 3. [Google Scholar] [CrossRef]
- Young, A.J.; Ferris, D.P. State of the art and future directions for lower limb robotic exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Dembia, C.L.; Silder, A.; Uchida, T.K.; Hicks, J.L.; Delp, S.L. Simulating ideal assistive devices to reduce the metabolic cost of walking with heavy loads. PLoS ONE 2017, 12. [Google Scholar] [CrossRef]
- Himann, J.E.; Cunningham, D.A.; Rechnitzer, P.A.; Paterson, D.H. Age-related changes in speed of walking. Med. Sci. Sports Exerc. 1988, 20, 161–166. [Google Scholar] [CrossRef]
- Oberg, T.; Karsznia, A.; Oberg, K. Basic Gait Parameters: Reference Data for Normal Subjects, 10–79 Years of Age. J. Rehabil. Res. 1993, 30. [Google Scholar]
- Brockway, J.M. Derivation of formulae used to calculate energy expenditure in man. Hum. Nutr. Clin. Nutr. 1987, 41, 463–471. [Google Scholar] [PubMed]
- Faul, F.; Erdfelder, E.; Lang, A.-G.; Buchner, A. G*Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef] [PubMed]
- Hopkins, W.G.; Marshall, S.W.; Batterham, A.M.; Hanin, J. Progressive statistics for studies in sports medicine and exercise science. Med. Sci. Sports Exerc. 2009, 41, 3–12. [Google Scholar] [CrossRef]
- Barazesh, H.; Sharbafi, M.A. A biarticular passive exosuit to support balance control can reduce metabolic cost of walking. Bioinspir. Biomim. 2020, 15. [Google Scholar] [CrossRef] [PubMed]
- Xiong, C.; Zhou, T.; Zhou, L.; Wei, T.; Chen, W. Multi-articular passive exoskeleton for reducing the metabolic cost during human walking. In Proceedings of the 2019 Wearable Robotics Association Conference, WearRAcon 2019, Scottsdale, AZ, USA, 26–28 March 2019; pp. 63–67. [Google Scholar]
- Kuo, A.D. A simple model of bipedal walking predicts the preferred speed-step length relationship. J. Biomech. Eng. 2001, 123, 264–269. [Google Scholar] [CrossRef] [PubMed]
- Sawicki, G.S.; Ferris, D.P. Mechanics and energetics of level walking with powered ankle exoskeletons. J. Exp. Biol. 2008, 211, 1402–1413. [Google Scholar] [CrossRef]
- Koller, J.R.; Jacobs, D.A.; Ferris, D.P.; Remy, C.D. Learning to walk with an adaptive gain proportional myoelectric controller for a robotic ankle exoskeleton. J. Neuroeng. Rehabil. 2015, 12. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FreeWalk | EXO | |
|---|---|---|
| Stance phase [%] | 62.8 ± 1.9 | 62.7 ± 1.8 |
| Swing phase [%] | 37.2 ± 1.9 | 37.3 ± 1.8 |
| Step length [cm] | 72.1 ± 4.3 | 71.9 ± 4.2 |
| Stride length [cm] | 144.2 ± 8.6 | 143.8 ± 8.4 |
| Study | Joint Assisted | Peak Torque [Nm/kg] | Mass [kg] | Net Metabolic Cost [%] |
|---|---|---|---|---|
| Collins et al. 2015 [11] | Hip | ~0.25 | 0.91 | −7.2 |
| Panizzolo et al. 2019 [15] | Hip | ~0.04 | 0.65 | −3.3 |
| Xiong et al. 2019 [29] | Hip and ankle | N/A | 1.95 | −7.6 |
| Etenzi et al. 2020 [13] | Ankle and knee | ~0.05 | 2.80 | +23 |
| Barazesh et al. 2020 [28] | Hip and knee | N/A | ~1.79 | −4.7 |
| Current study | Hip | ~0.02 | 0.63 | −4.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Panizzolo, F.A.; Annese, E.; Paoli, A.; Marcolin, G. A Single Assistive Profile Applied by a Passive Hip Flexion Device Can Reduce the Energy Cost of Walking in Older Adults. Appl. Sci. 2021, 11, 2851. https://doi.org/10.3390/app11062851
Panizzolo FA, Annese E, Paoli A, Marcolin G. A Single Assistive Profile Applied by a Passive Hip Flexion Device Can Reduce the Energy Cost of Walking in Older Adults. Applied Sciences. 2021; 11(6):2851. https://doi.org/10.3390/app11062851
Chicago/Turabian StylePanizzolo, Fausto Antonio, Eugenio Annese, Antonio Paoli, and Giuseppe Marcolin. 2021. "A Single Assistive Profile Applied by a Passive Hip Flexion Device Can Reduce the Energy Cost of Walking in Older Adults" Applied Sciences 11, no. 6: 2851. https://doi.org/10.3390/app11062851
APA StylePanizzolo, F. A., Annese, E., Paoli, A., & Marcolin, G. (2021). A Single Assistive Profile Applied by a Passive Hip Flexion Device Can Reduce the Energy Cost of Walking in Older Adults. Applied Sciences, 11(6), 2851. https://doi.org/10.3390/app11062851