
Transient Modeling and Recovery of Non-Stationary Fault Signature for Condition Monitoring of Induction Motors

 ,
,  ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
- For studying the impact of broken bars on different performance parameters, a WFA-based analytical model is developed. This model takes less simulation time to study the effect of low voltage and asymmetry on the machine’s performance. It also helps to plot the faulty theoretical patterns used as a benchmark for differentiation among fault and spatial harmonics;
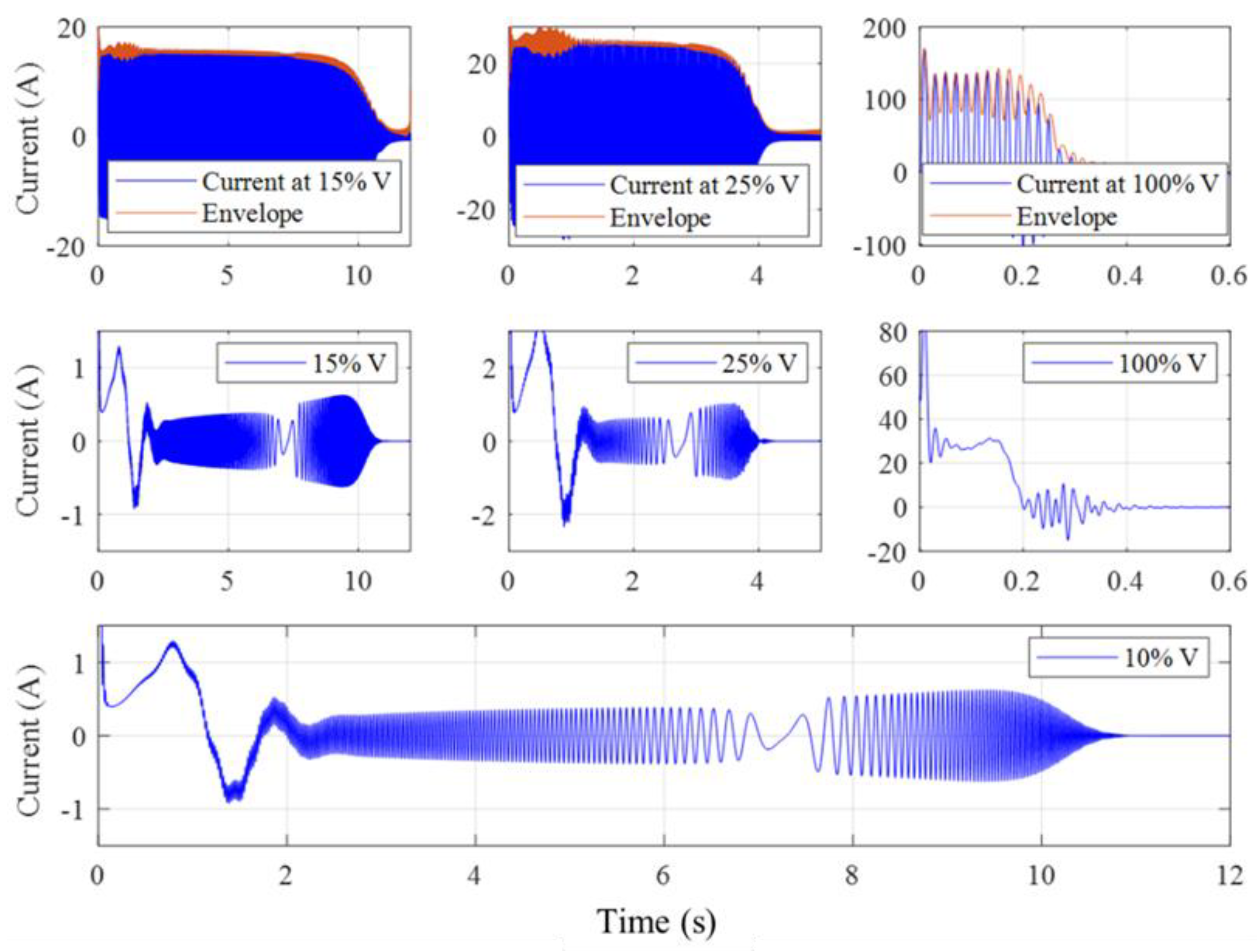
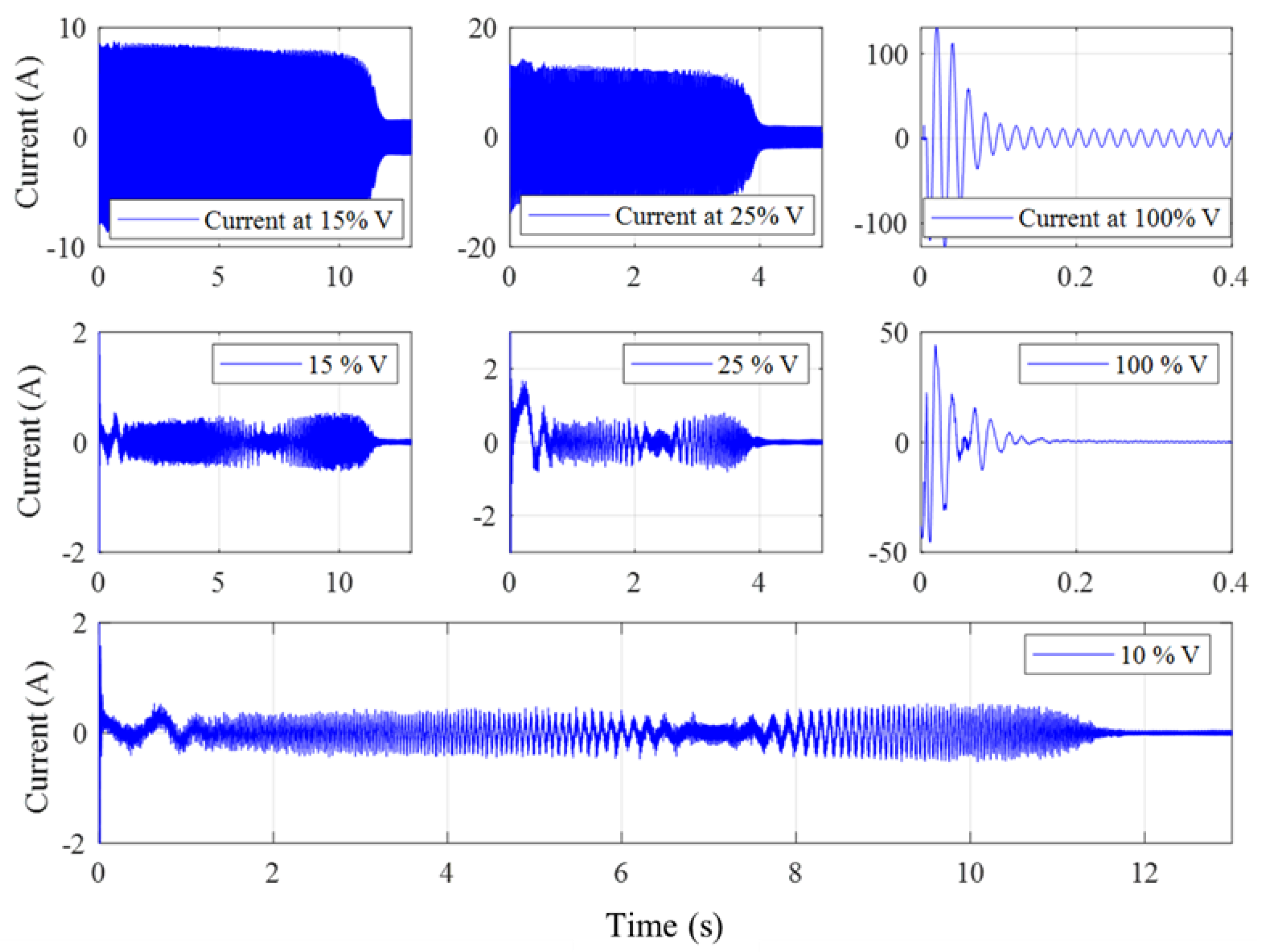
- Unlike most of the papers where a high inertia load or variable transformer is used, an industrial inverter-based low voltage test to extend the motor’s transient interval is proposed. It is also described how an industrial inverter can reduce the voltage while maintaining a constant rated frequency. Increasing the transient length of the motor startup current improves the time–frequency resolution of the spectrum;
- An algorithm to improve the spectrum’s legibility is proposed, which helps segregate various frequency patterns in the transient regime;
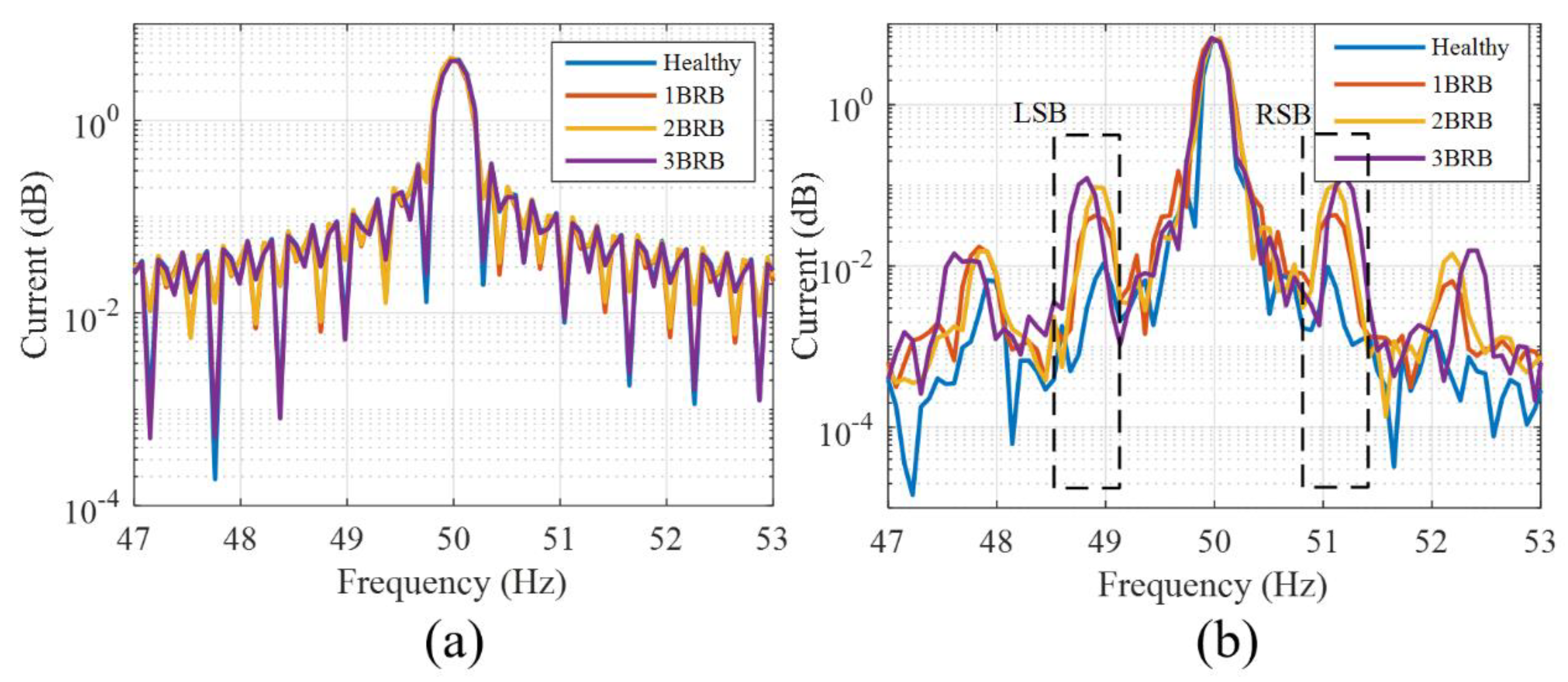
- The wavelet transform is preferred over the short-time Fourier transform (STFT) to avoid inherited FFT drawbacks. Moreover, a band-stop infinite impulse response (IIR) filter is used to attenuate the fundamental component, which improves the spectrum’s legibility;
- It is proposed that the selection of time–frequency regions with a 95% confidence interval (CI) in the form of a contour plot gives a more unambiguous indication of faulty patterns. By adjusting the level of the CI, the spatial and switching frequency-based patterns can be avoided. To the best of the author’s knowledge, this technique is not presented in the literature so far.
2. Theoretical Background
2.1. The Modeling of Induction Motor
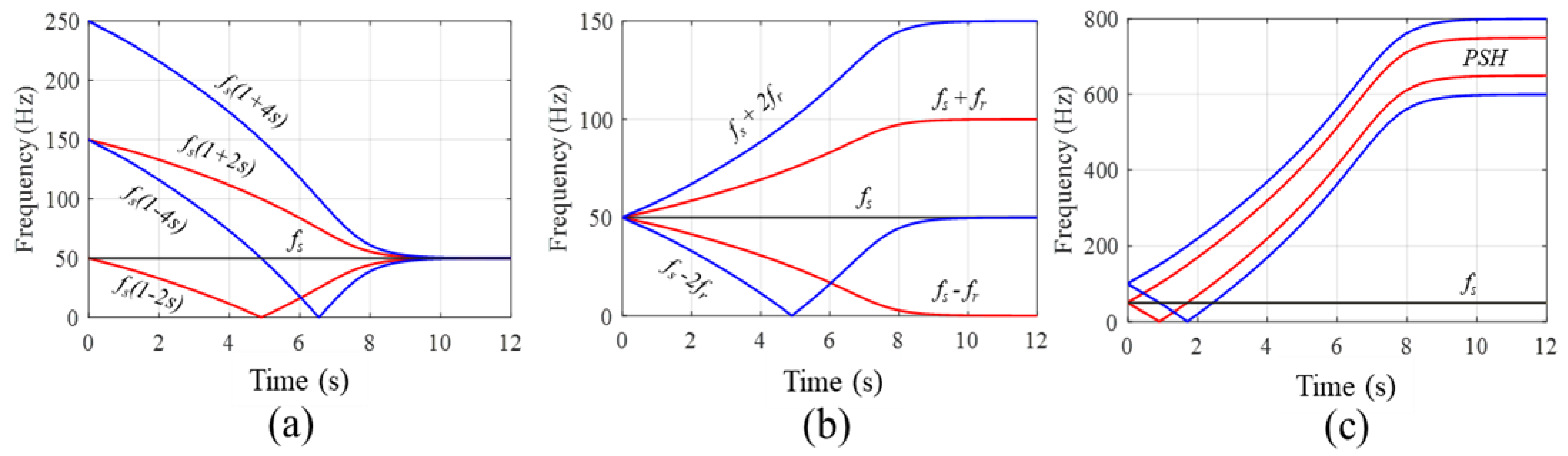
2.2. The Fault Signature Equations and Modulation
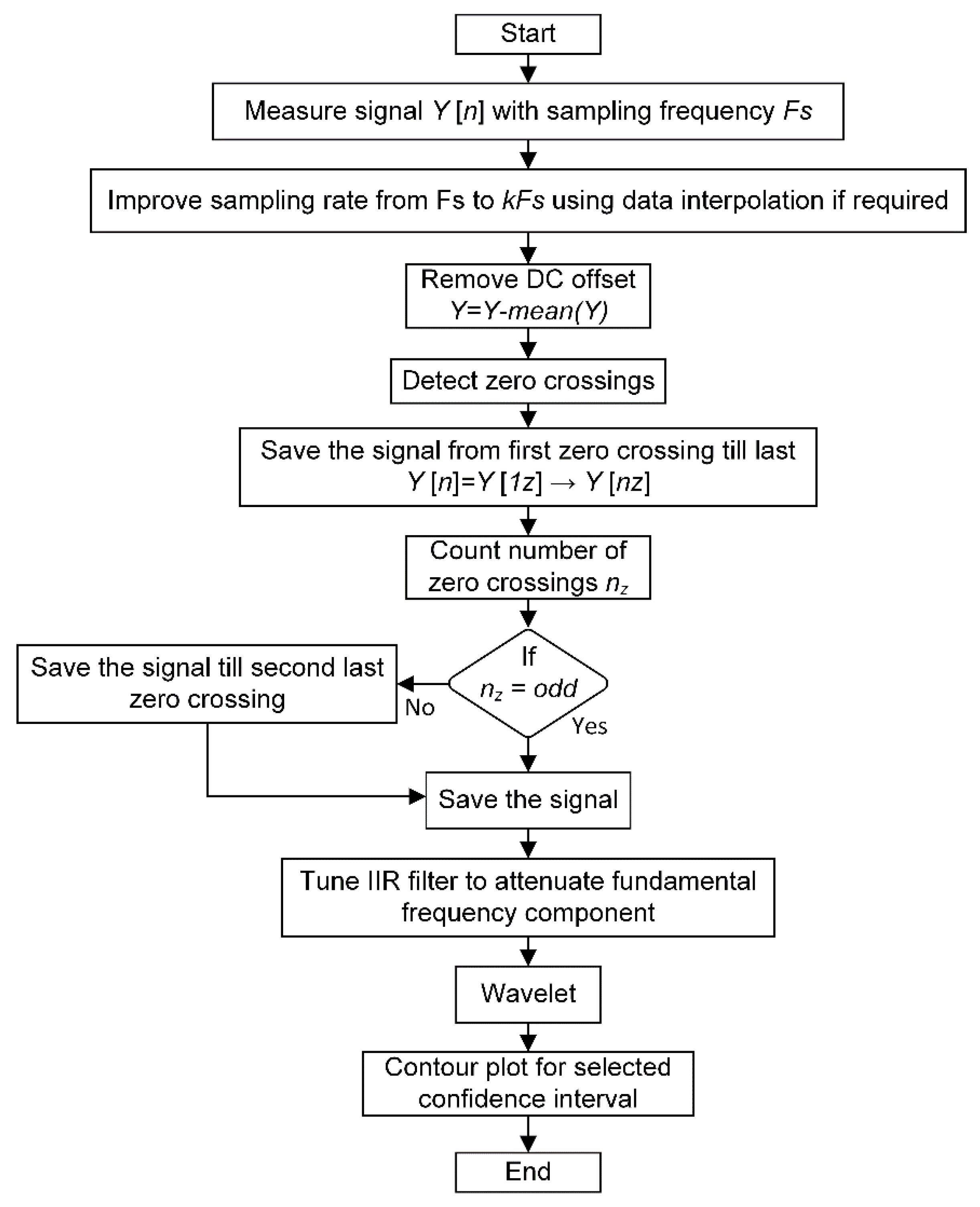
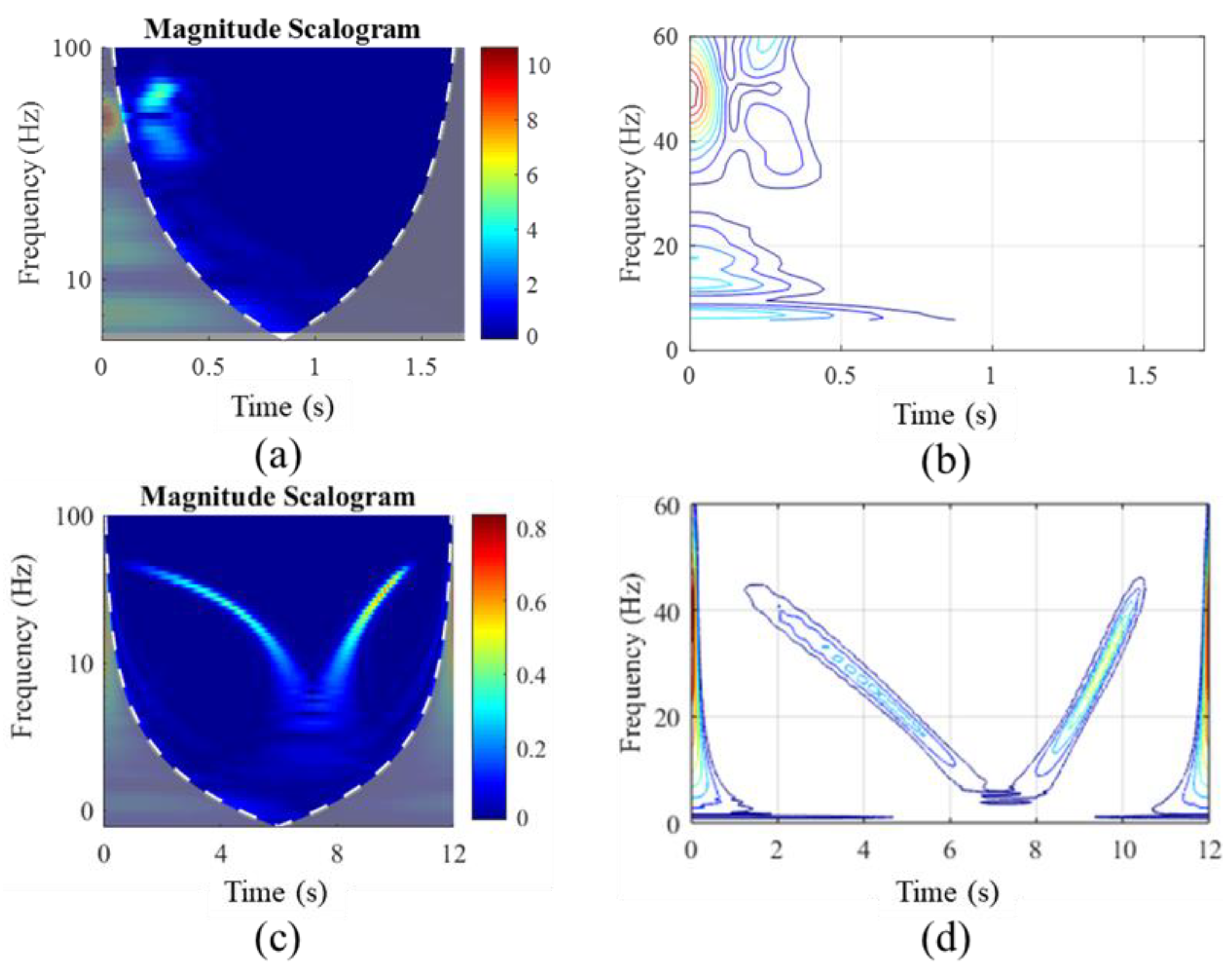
2.3. The Recovery of the Nonstationary Signal and Related Signal Processing
- Measure the signal with the sampling frequency, meeting the Nyquist criterion. The sampling frequency can be improved later using data interpolation. This is necessary for the accurate detection of zero-crossing points. Moreover, any small constant offset due to data acquisition devices should be removed to avoid a high-amplitude 0 Hz component in the spectrum. This is achieved by subtracting the mean value of the signal from itself;
- Most signal processing techniques, such as DTFT, are sensitive to signal discontinuities and the fractional number of acquired cycles. This problem is solved by counting the integral number of cycles using zero-crossing detection. Saving the signal from the first until the last zero crossings will remove the starting and ending fractional portions of the signal;
- Each sinusoidal signal has three zero crossings, which can be exploited to get the integral number of cycles. If the number of zero crossings is odd, then the signal consists of an integral number of cycles; otherwise, the samples from the second-last zero-crossing until the end should be discarded;
- The band-stop IIR filter is then tuned to suppress the fundamental component;
- The recovered signal shows good spectral legibility both for frequency (steady state) and time–frequency (transient) analysis.
3. Simulation Results
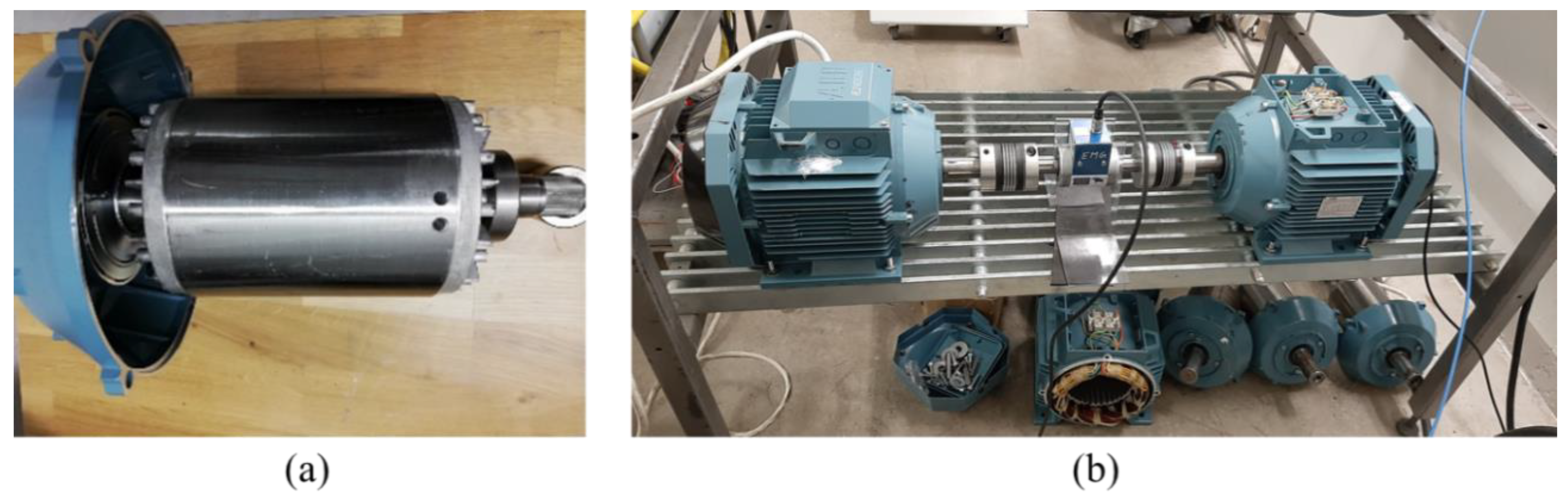
4. Practical Setup
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Bossio, G.R.; De Angelo, C.H.; Bossio, J.M.; Pezzani, C.M.; Garcia, G.O. Separating Broken Rotor Bars and Load Oscillations on IM Fault Diagnosis Through the Instantaneous Active and Reactive Currents. IEEE Trans. Ind. Electron. 2009, 56, 4571–4580. [Google Scholar] [CrossRef]
- Soualhi, A.; Clerc, G.; Razik, H. Detection and Diagnosis of Faults in Induction Motor Using an Improved Artificial Ant Clustering Technique. IEEE Trans. Ind. Electron. 2013, 60, 4053–4062. [Google Scholar] [CrossRef]
- Marques Cardoso, A.J.; Saraiva, E.S. On-line diagnostics of three-phase induction motors by Park’s vector. In Proceedings of the ICEM, Pisa, Italy, 12–14 September 1988; pp. 231–234. [Google Scholar]
- Oliveira, L.M.R.; Cardoso, A.J.M. Extended Park’s vector approach-based differential protection of three-phase power transformers. IET Electr. Power Appl. 2012, 6, 463. [Google Scholar] [CrossRef]
- Freire, N.M.A.; Estima, J.O.; Marques Cardoso, A.J. Open-Circuit Fault Diagnosis in PMSG Drives for Wind Turbine Applications. IEEE Trans. Ind. Electron. 2013, 60, 3957–3967. [Google Scholar] [CrossRef]
- Cruz, S.M.A.; Cardoso, A.J.M. Stator winding fault diagnosis in three-phase synchronous and asynchronous motors, by the extended Park’s vector approach. IEEE Trans. Ind. Appl. 2001, 37, 1227–1233. [Google Scholar] [CrossRef]
- Cruz, M.A.; Marques Cardoso, S.A.J. Rotor Cage Fault Diagnosis in Three-Phase Induction Motors by Extended Park’s Vector Approach. Electr. Mach. Power Syst. 2000, 28, 289–299. [Google Scholar]
- Ayhan, B.; Trussell, H.J.; Chow, M.Y.; Song, M.H. On the Use of a Lower Sampling Rate for Broken Rotor Bar Detection With DTFT and AR-Based Spectrum Methods. IEEE Trans. Ind. Electron. 2008, 55, 1421–1434. [Google Scholar] [CrossRef]
- Khezzar, A.; Kaikaa, M.Y.; El Kamel Oumaamar, M.; Boucherma, M.; Razik, H. On the Use of Slot Harmonics as a Potential Indicator of Rotor Bar Breakage in the Induction Machine. IEEE Trans. Ind. Electron. 2009, 56, 4592–4605. [Google Scholar] [CrossRef]
- Malekpour, M.; Phung, B.T.; Ambikairajah, E. Stator current envelope extraction for analysis of broken rotor bar in induction motors. In Proceedings of the 2017 IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 240–246. [Google Scholar]
- Belahcen, A.; Martinez, J.; Vaimann, T. Comprehensive computations of the response of faulty cage induction machines. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1510–1515. [Google Scholar]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Asad, B.; Vaimann, T.; Kallaste, A.; Belahcen, A. Harmonic Spectrum Analysis of Induction Motor With Broken Rotor Bar Fault. In Proceedings of the 2018 IEEE 59th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 12–13 November 2018; pp. 1–7. [Google Scholar]
- Asad, B.; Vaimann, T.; Belahcen, A.; Kallaste, A.; Rassõlkin, A.; Iqbal, M.N. Broken rotor bar fault detection of the grid and inverter-fed induction motor by effective attenuation of the fundamental component. IET Electr. Power Appl. 2019, 13, 2005–2014. [Google Scholar] [CrossRef]
- Puche-Panadero, R.; Pineda-Sanchez, M.; Riera-Guasp, M.; Roger-Folch, J.; Hurtado-Perez, E.; Perez-Cruz, J. Improved Resolution of the MCSA Method Via Hilbert Transform, Enabling the Diagnosis of Rotor Asymmetries at Very Low Slip. IEEE Trans. Energy Convers. 2009, 24, 52–59. [Google Scholar] [CrossRef]
- Pineda-Sanchez, M.; Riera-Guasp, M.; Antonino-Daviu, J.A.; Roger-Folch, J.; Perez-Cruz, J.; Puche-Panadero, R. Diagnosis of Induction Motor Faults in the Fractional Fourier Domain. IEEE Trans. Instrum. Meas. 2010, 59, 2065–2075. [Google Scholar] [CrossRef]
- Moussa, M.A.; Boucherma, M.; Khezzar, A. A Detection Method for Induction Motor Bar Fault Using Sidelobes Leakage Phenomenon of the Sliding Discrete Fourier Transform. IEEE Trans. Power Electron. 2017, 32, 5560–5572. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.-A. Diagnosis of Broken-Bar Fault in Induction Machines Using Discrete Wavelet Transform Without Slip Estimation. IEEE Trans. Ind. Appl. 2009, 45, 1395–1404. [Google Scholar] [CrossRef]
- Singh, S.; Kumar, N. Detection of Bearing Faults in Mechanical Systems Using Stator Current Monitoring. IEEE Trans. Ind. Inform. 2017, 13, 1341–1349. [Google Scholar] [CrossRef]
- Kang, M.; Kim, J.-M. Reliable Fault Diagnosis of Multiple Induction Motor Defects Using a 2-D Representation of Shannon Wavelets. IEEE Trans. Magn. 2014, 50, 1–13. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Martinez-Roman, J.; Matic, D. Fault Diagnosis of Rotating Electrical Machines in Transient Regime Using a Single Stator Current’s FFT. IEEE Trans. Instrum. Meas. 2015, 64, 3137–3146. [Google Scholar] [CrossRef]
- Antonino-Daviu, J. Electrical monitoring under transient conditions: A new paradigm in electric motors predictive maintenance. Appl. Sci. 2020, 10, 6137. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Spyropoulos, D.V.; Mitronikas, E. Advanced Detection of Rotor Electrical Faults in Induction Motors at Start-up. IEEE Trans. Energy Convers. 2020. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Panagiotou, P.A.; Lee, S. Bin Generation of Mechanical Frequency Related Harmonics in the Stray Flux Spectra of Induction Motors Suffering from Rotor Electrical Faults. IEEE Trans. Ind. Appl. 2020, 56, 4796–4803. [Google Scholar] [CrossRef]
- Cunha, C.C.M.; Lyra, R.O.C.; Filho, B. Simulation and Analysis of Induction Machines With Rotor Asymmetries. IEEE Trans. Ind. Appl. 2005, 41, 18–24. [Google Scholar] [CrossRef]
- Faiz, J.; Ojaghi, M. Unified winding function approach for dynamic simulation of different kinds of eccentricity faults in cage induction machines. IET Electr. Power Appl. 2009, 3, 461. [Google Scholar] [CrossRef]
- Nandi, S. Modeling of Induction Machines Including Stator and Rotor Slot Effects. IEEE Trans. Ind. Appl. 2004, 40, 1058–1065. [Google Scholar] [CrossRef]
- Marfoli, A.; Bolognesi, P.; Papini, L.; Gerada, C. Mid-Complexity Circuital Model of Induction Motor with Rotor Cage: A Numerical Resolution. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 277–283. [Google Scholar]
- Sudhoff, S.D.; Kuhn, B.T.; Corzine, K.A.; Branecky, B.T. Magnetic Equivalent Circuit Modeling of Induction Motors. IEEE Trans. Energy Convers. 2007, 22, 259–270. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Martinez-Roman, J.; Puche-Panadero, R.; Pineda-Sanchez, M.; Perez-Cruz, J.; Riera-Guasp, M. Induction machine model with space harmonics for fault diagnosis based on the convolution theorem. Int. J. Electr. Power Energy Syst. 2018, 100, 463–481. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Chinesta, F.; Pineda-Sanchez, M.; Aguado, J.V.; Borzacchiello, D.; Puche-Panadero, R. Induction machine model with finite element accuracy for condition monitoring running in real time using hardware in the loop system. Int. J. Electr. Power Energy Syst. 2019, 111, 315–324. [Google Scholar] [CrossRef]
- Asad, B.; Vaimann, T.; Kallaste, A.; Rassolkin, A.; Belahcen, A. Winding Function Based Analytical Model of Squirrel Cage Induction Motor for Fault Diagnostics. In Proceedings of the 2019 26th International Workshop on Electric Drives: Improvement in Efficiency of Electric Drives (IWED), Moscow, Russia, 30 January–2 February 2019; pp. 1–6. [Google Scholar]
- Asad, B.; Vaiman, T.; Belahcen, A.; Kallaste, A.; Rassolkin, A.; Iqbal, M.N. Modified Winding Function-based Model of Squirrel Cage Induction Motor for Fault Diagnostics. IET Electr. Power Appl. 2020, 14, 1722–1734. [Google Scholar] [CrossRef]
- Bellini, A.; Filippetti, F.; Franceschini, G.; Tassoni, C.; Kliman, G.B. Quantitative evaluation of induction motor broken bars by means of electrical signature analysis. IEEE Trans. Ind. Appl. 2001, 37, 1248–1255. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault | Modulating Frequencies |
|---|---|
| Broken Rotor Bars | |
| PSH and Eccentricity | More precisely: |
| Parameter | Symbol | Value |
|---|---|---|
| Number of poles | P | 4 |
| Number of phases | φ | 3 |
| Connection | - | Delta |
| Stator slots | Ns | 36, non-skewed |
| Rotor bars | Nb | 28, skewed |
| Rated voltage | V | 400 V@50 Hz |
| Rated current | I | 8.8 A |
| Rated power | Pr | 7.5 kW @ 50 Hz |
| Vrated (V) | frated (Hz) | V/Hz | fset (Hz) | Vout (V) |
|---|---|---|---|---|
| 300 | 300 | 1 | 50 | 50 |
| 300 | 150 | 2 | 50 | 100 |
| 300 | 100 | 3 | 50 | 150 |
| 300 | 75 | 4 | 50 | 200 |
| 300 | 60 | 5 | 50 | 250 |
| 300 | 50 | 6 | 50 | 300 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asad, B.; Vaimann, T.; Belahcen, A.; Kallaste, A.; Rassõlkin, A.; Ghafarokhi, P.S.; Kudelina, K. Transient Modeling and Recovery of Non-Stationary Fault Signature for Condition Monitoring of Induction Motors. Appl. Sci. 2021, 11, 2806. https://doi.org/10.3390/app11062806
Asad B, Vaimann T, Belahcen A, Kallaste A, Rassõlkin A, Ghafarokhi PS, Kudelina K. Transient Modeling and Recovery of Non-Stationary Fault Signature for Condition Monitoring of Induction Motors. Applied Sciences. 2021; 11(6):2806. https://doi.org/10.3390/app11062806
Chicago/Turabian StyleAsad, Bilal, Toomas Vaimann, Anouar Belahcen, Ants Kallaste, Anton Rassõlkin, Payam Shams Ghafarokhi, and Karolina Kudelina. 2021. "Transient Modeling and Recovery of Non-Stationary Fault Signature for Condition Monitoring of Induction Motors" Applied Sciences 11, no. 6: 2806. https://doi.org/10.3390/app11062806
APA StyleAsad, B., Vaimann, T., Belahcen, A., Kallaste, A., Rassõlkin, A., Ghafarokhi, P. S., & Kudelina, K. (2021). Transient Modeling and Recovery of Non-Stationary Fault Signature for Condition Monitoring of Induction Motors. Applied Sciences, 11(6), 2806. https://doi.org/10.3390/app11062806