Design and Implementation of a Real Time Control System for a 2DOF Robot Based on Recurrent High Order Neural Network Using a Hardware in the Loop Architecture


 ,
,  and
and 
Abstract
1. Introduction
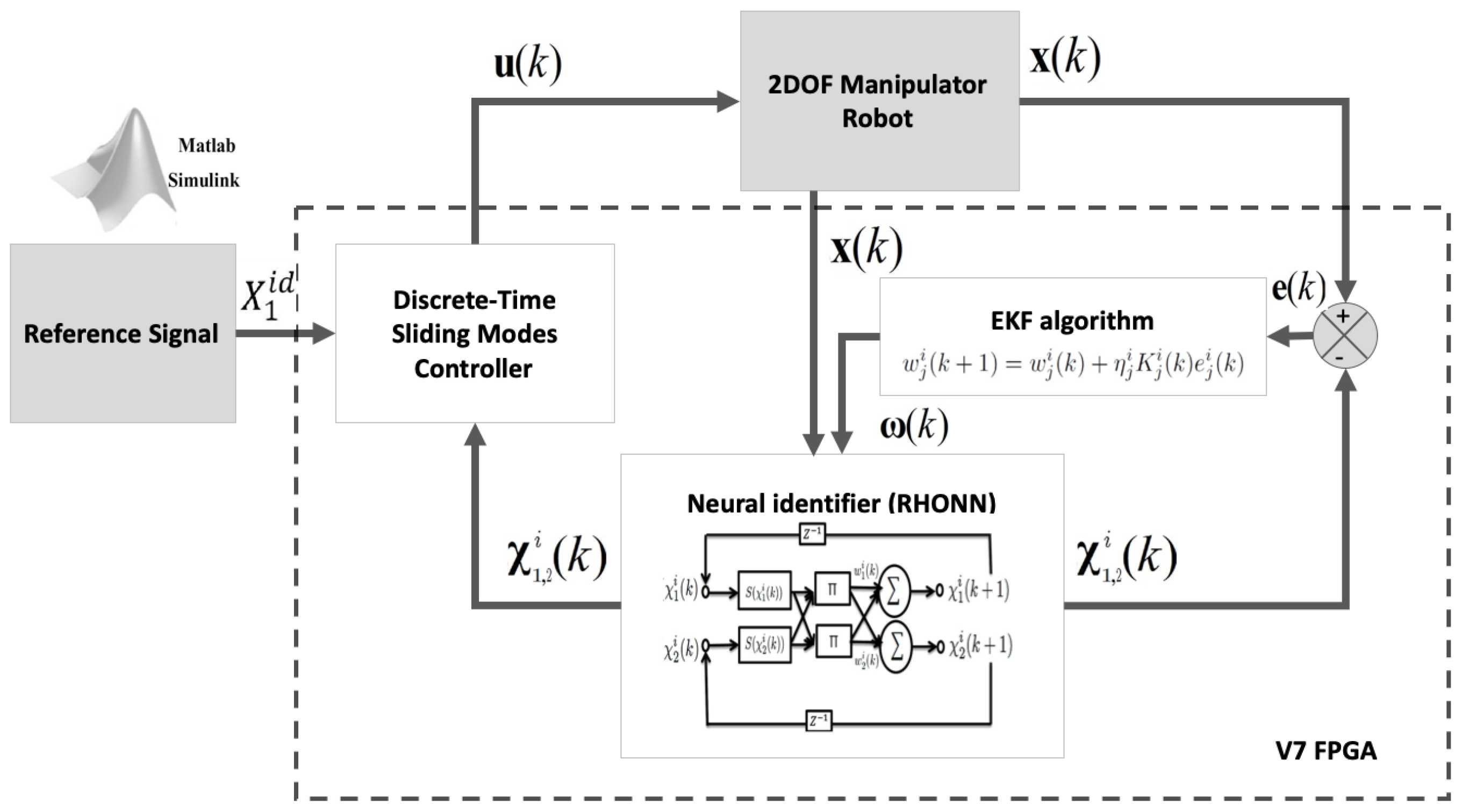
- The control system design and implementation for a 2DOF manipulator robot using a RHONN in a hardware-in-loop architecture.
- Is presented a methodology for identification and tracking of the 2DOF manipulator robot.
- A Real Time implementation on an FPGA of the proposed control system based in a RHONN with an EKF algorithm with an SMC.
- Inside the EKF the FPGA computes the associated state and measurement noise covariance matrices composed by the coupled variance between the plant states.
- The results are obtained with a hardware-in-loop architecture and the experiments and the results show the high performance of the system.
2. Discrete-Time 2DOF Robot Manipulator Model
3. Discrete-Time 2DOF Robot Manipulator Model
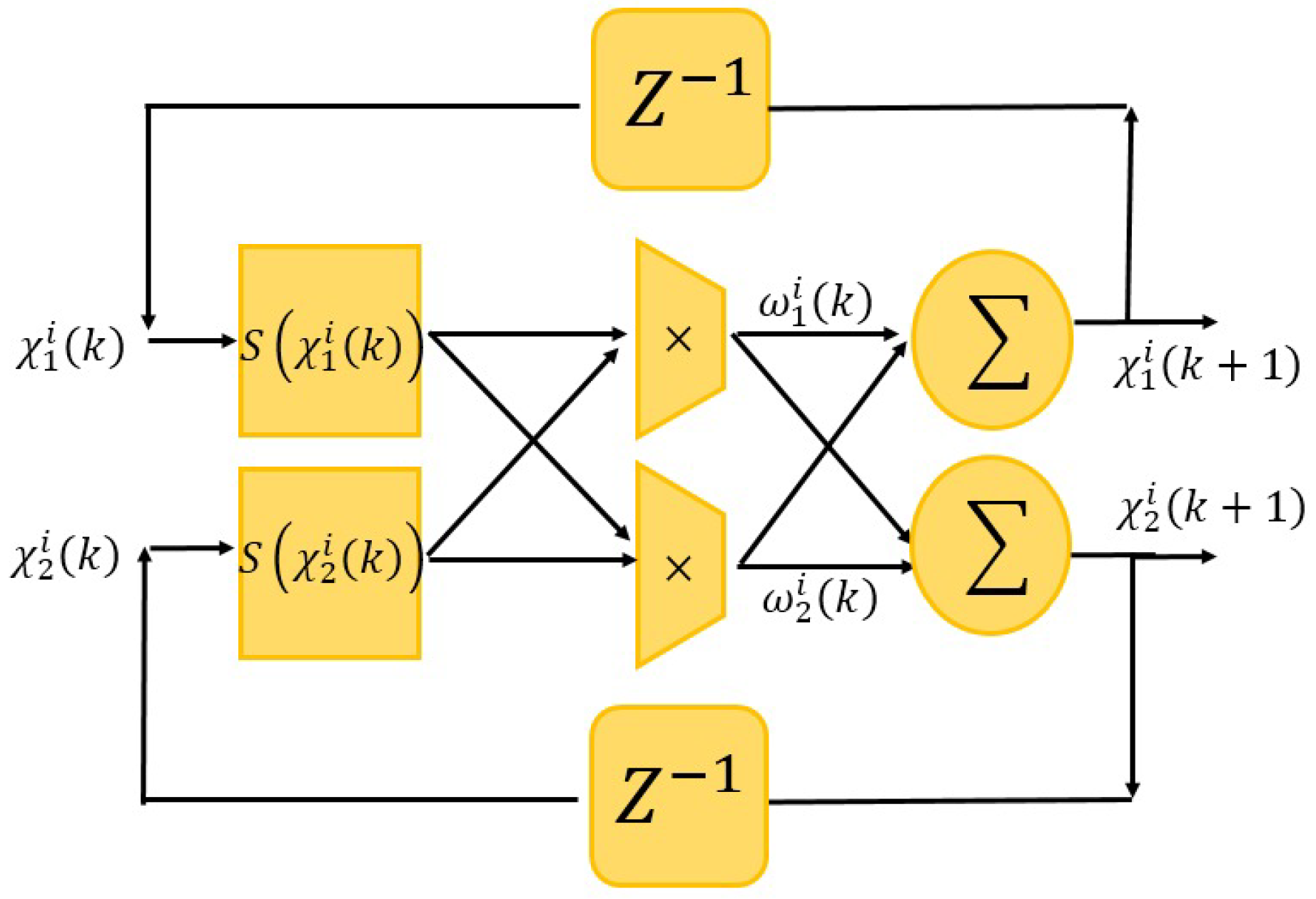
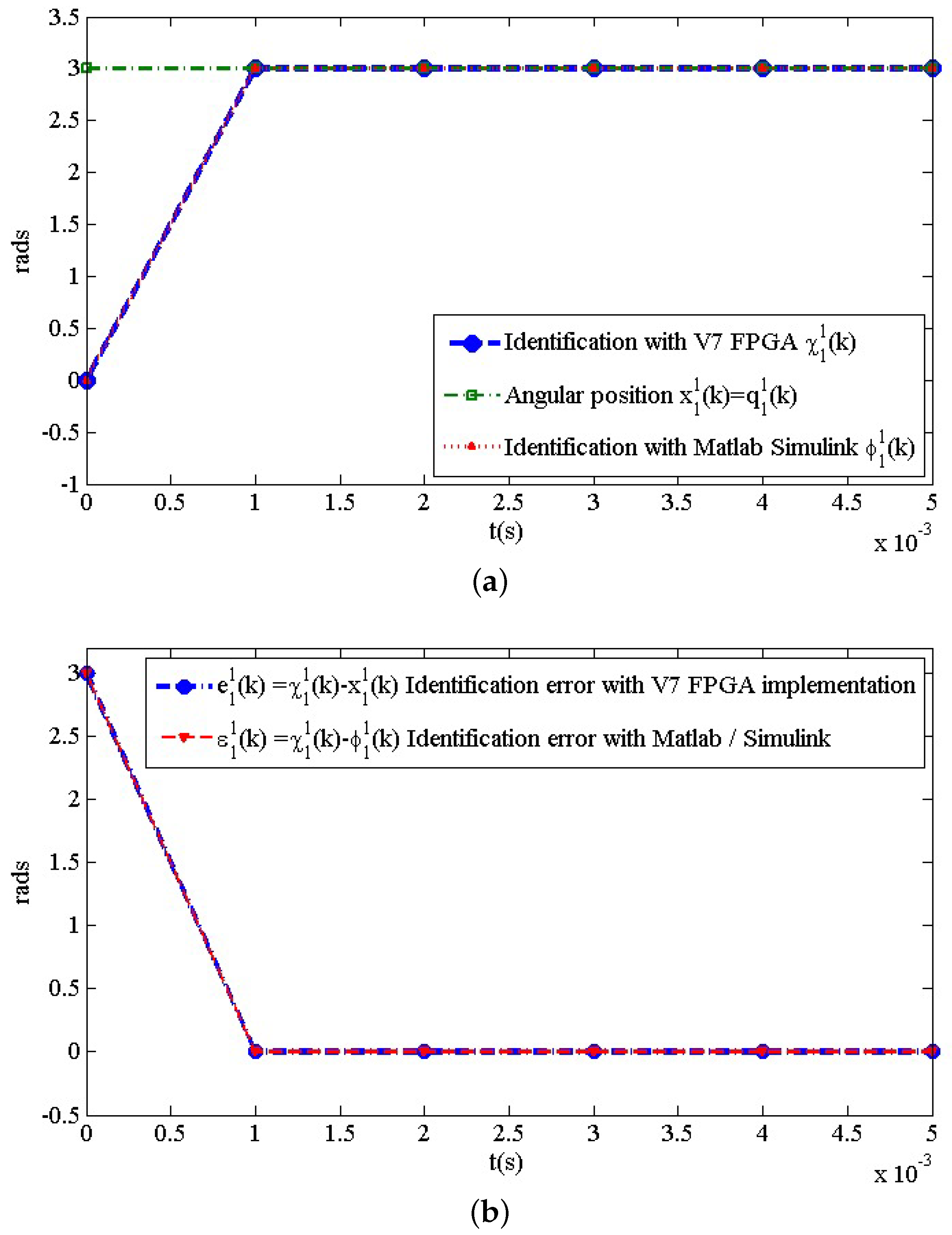
3.1. Neural Identification Method
3.2. Extended Kalman Filtering Training Algorithm
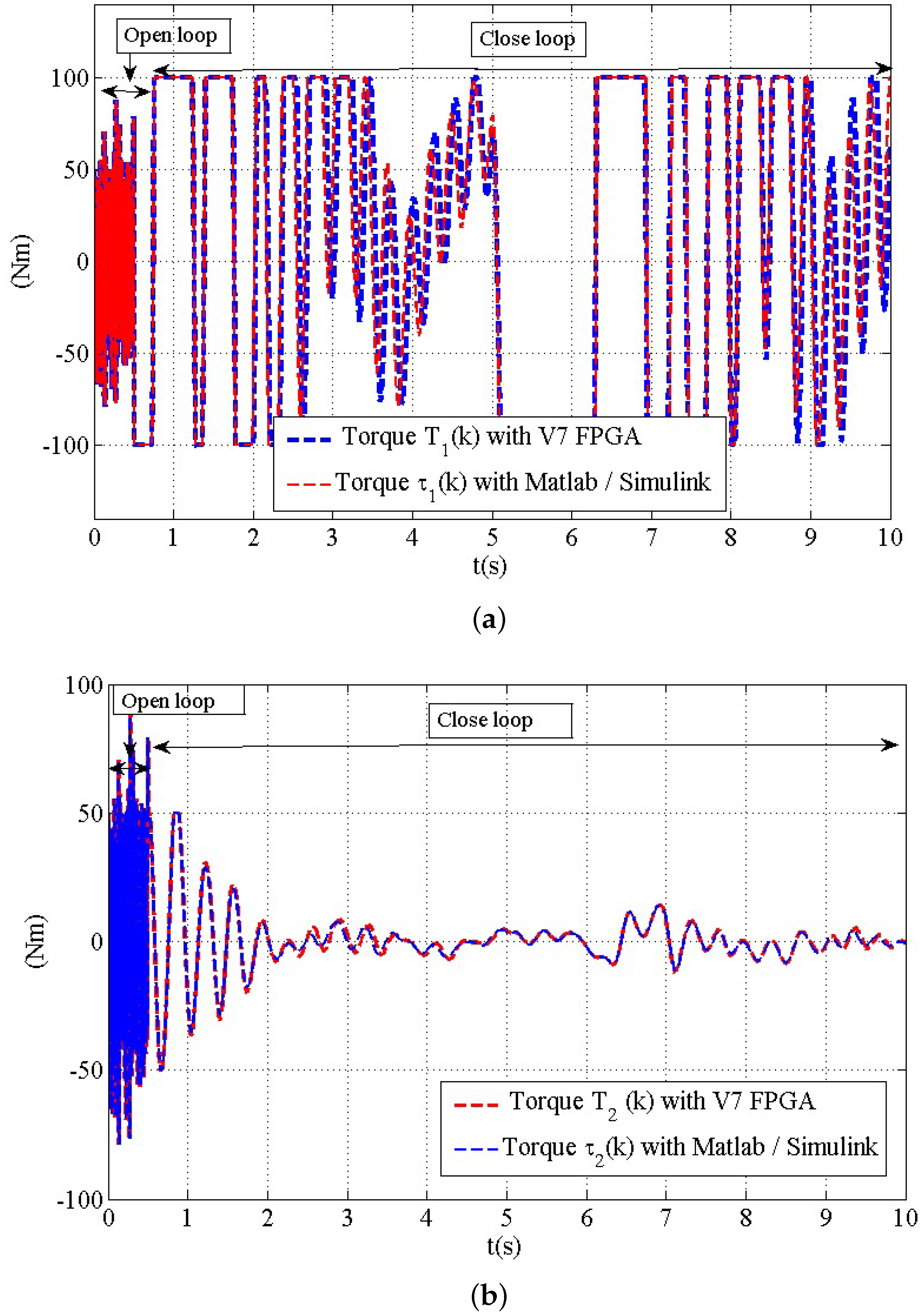
3.3. Discrete-Time Sliding Mode Controller
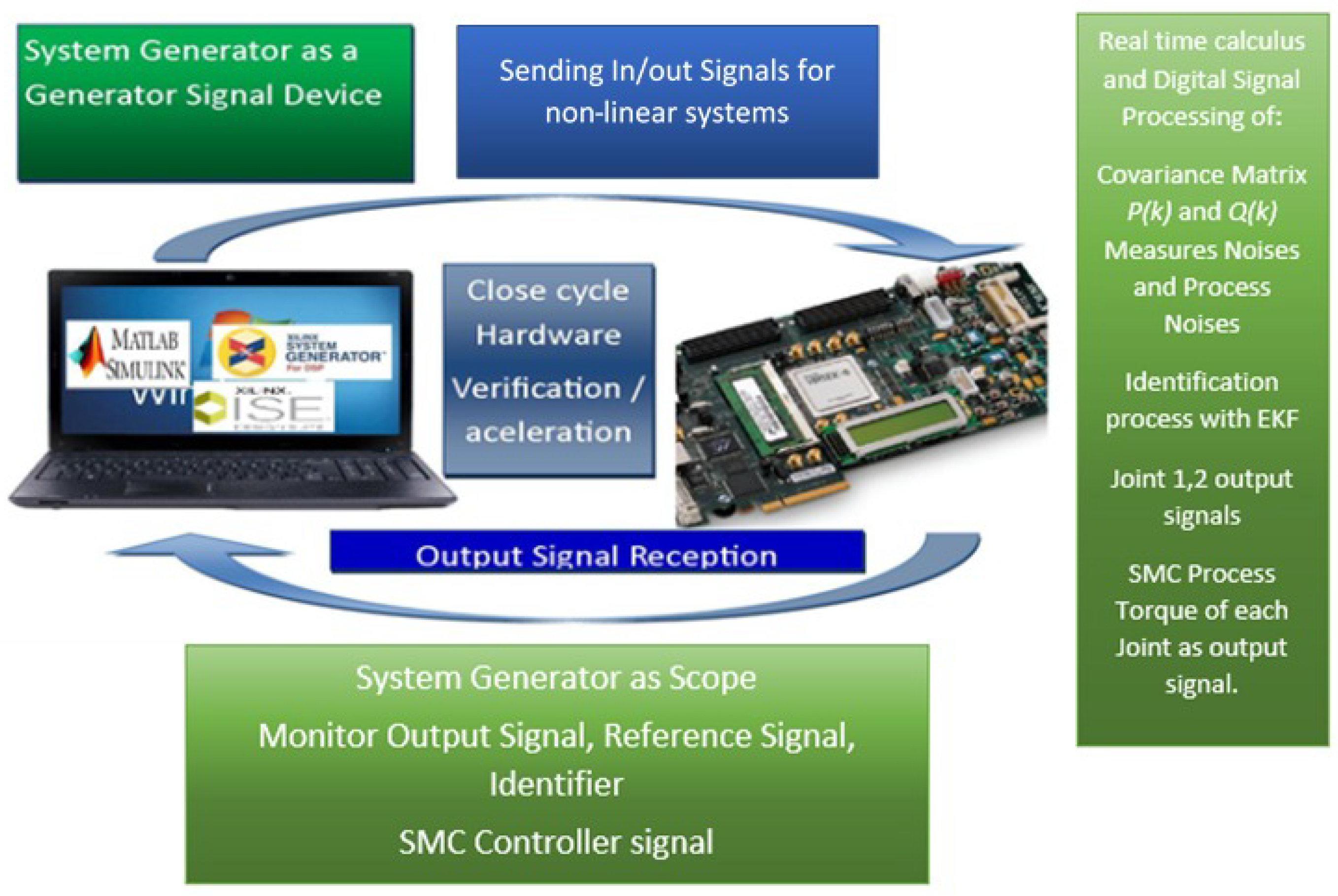
4. Real-Time Implementation and HIL Method
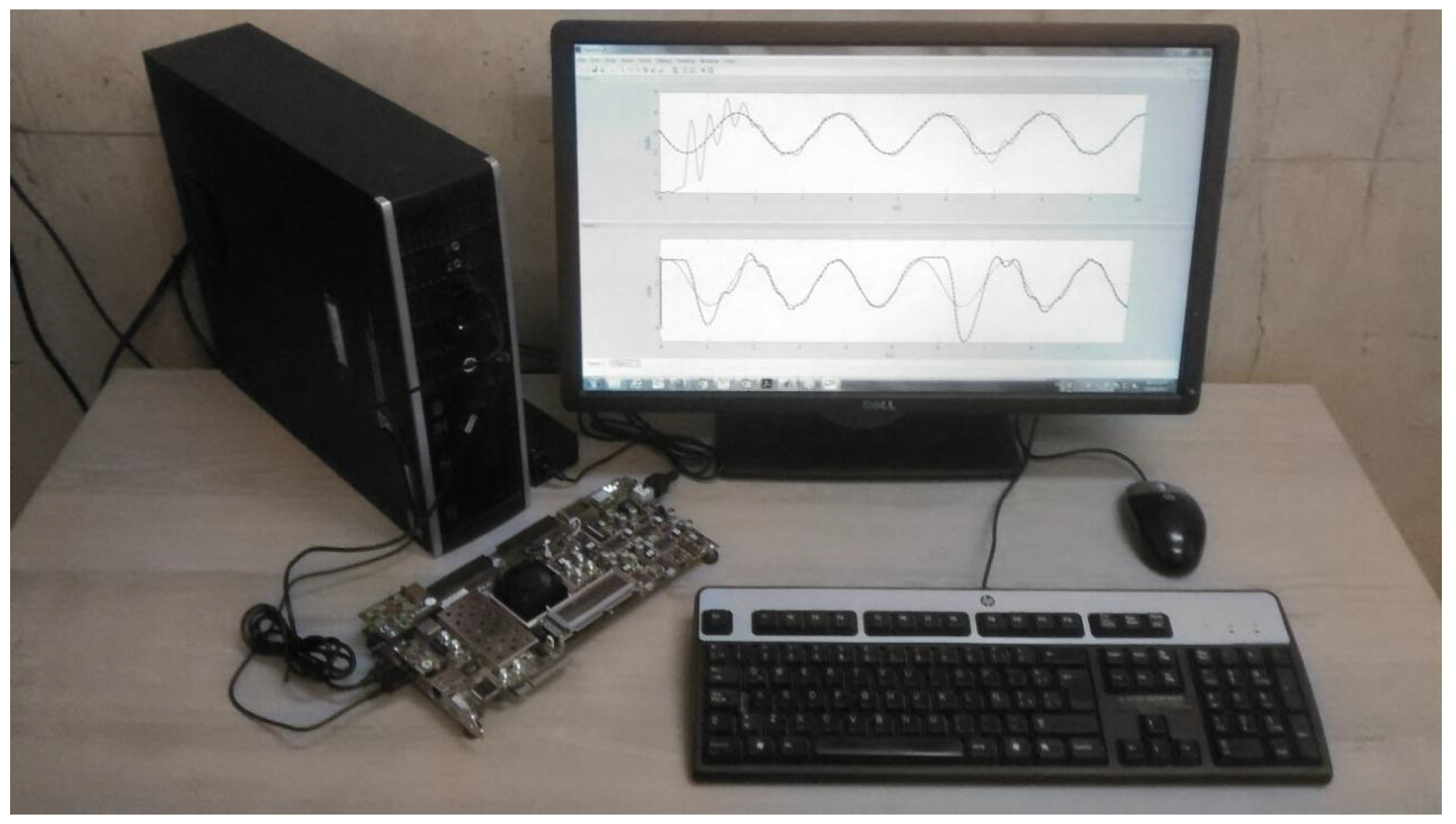
5. Experimental Test and Real Time Results
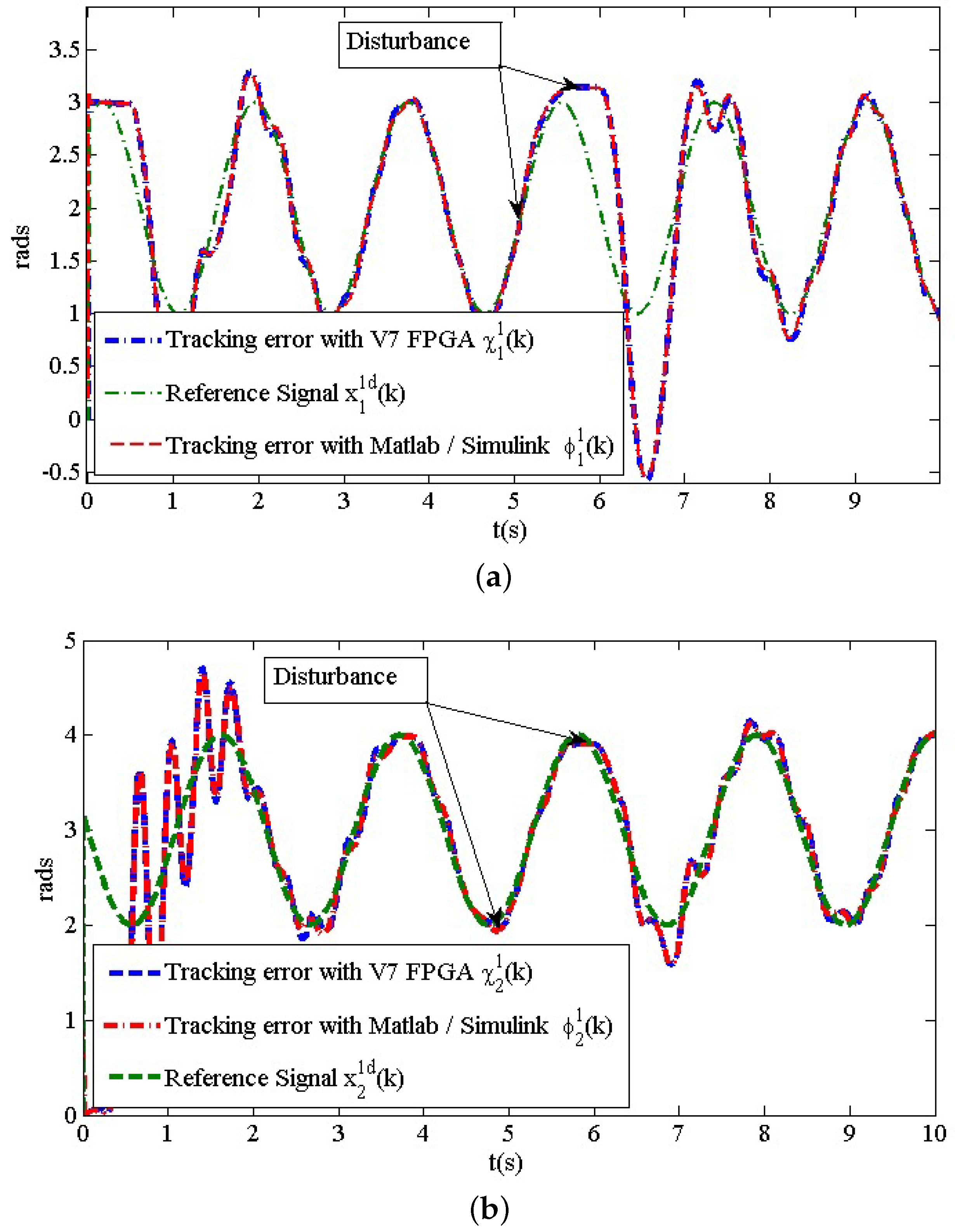
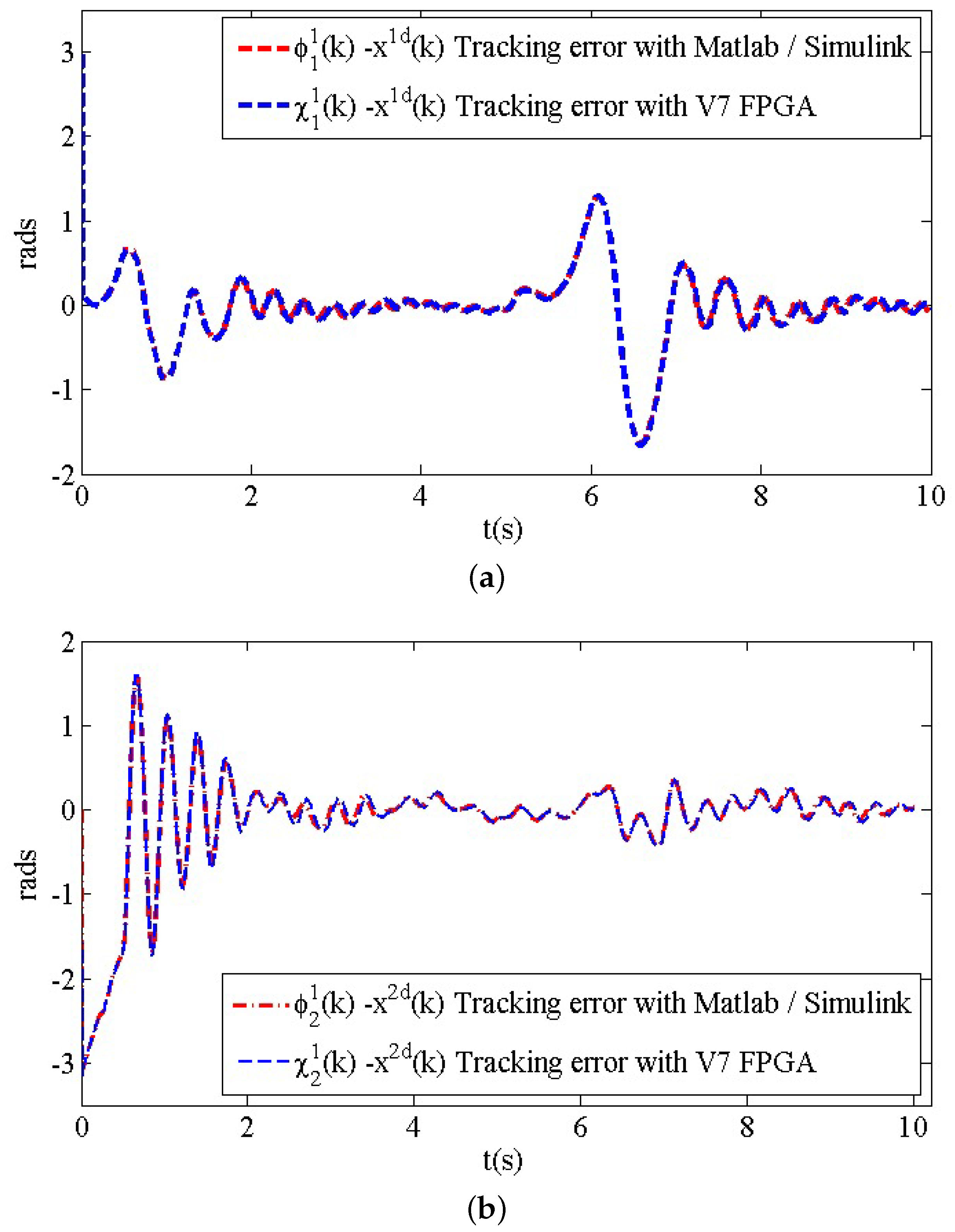
Tracking Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 2DOF | Two degrees of freedom |
| NN | Neural networks |
| EKF | Extended Kalman filter |
| SMC | Sliding-mode controller |
| RHONN | Recurrent high-order neural network |
| XSG | Xilinx system generator |
| HIL | Hardware-in-loop |
| KF | Kalman filtering |
| FPGA | Field programmable gate array |
| PCB | Printed circuit board |
| v7 | Virtex 7 FPGA |
| FF | Flip-flop |
| LUTS | Look-up table |
| IOBs | Input/output block |
| Mults/DSP48S | Floating-point multiplier circuit |
| TBUFs | 3-state buffer |
| BRAMs | Block RAM |
| Slices | Basic building block components in the FPGA fabric |
References
- Cleary, K.; Melzer, A.; Watson, V.; Kronreif, G.; Stoianovici, D. Interventional robotic systems: Applications and technology state-of-the-art. Minim. Invasive Ther. Allied Technol. 2006, 15, 101–113. [Google Scholar] [CrossRef] [PubMed]
- Madoński, R.; Kordasz, M.; Sauer, P. Application of a Disturbance-Rejection Controller for Robotic-Enhanced Limb Rehavbilitation Trainings. ISA Trans. 2014, 53, 899–908. [Google Scholar] [CrossRef] [PubMed]
- Hong, J.; Dohi, T.; Hashizume, M.; Konishi, K.; Hata, N. An ultrasound-driven needle-insertion robot for percutaneous cholecystostomy. Phys. Med. Biol. 2004, 49, 441–455. [Google Scholar] [CrossRef] [PubMed]
- Guerra, J.F.; García-Hernandez, R.; Llama, M.A. Decentralized Neural Block Control for a Robot Manipulator based in UKF training. In Proceedings of the 2019 International Conference on Electronics, Communications and Computers (CONIELECOMP), Cholula, Mexico, 27 February–1 March 2019; pp. 88–89. [Google Scholar]
- Vázquez, L.A.; Jurado, F.; Castañeda, C.E.; Alanis, A.Y. Real-Time Implementation of a Neural Integrator Backstepping Control via Recurrent Wavelet First Order Neural Network. Neural Process. Lett. 2018, 49, 1629–1648. [Google Scholar] [CrossRef]
- Slotine, J.E. The Robust Control of Robot Manipulators. Int. J. Robot. Res. 1985, 4, 49–64. [Google Scholar] [CrossRef]
- Utkin, I.; Chang, H.-C. Sliding Mode Control on Electro-Mechanical Systems. In Mathematical Problems in Engineering; CRC Press: New York, NY, USA, 1999. [Google Scholar]
- Garcia-Hernandez, R.; Sanchez, E.N.; Loukianov, A.G.; Bayro-Corrochano, E.; Santibanez, V. Decentralized Neural Identification and Control for Robotics Manipulators. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006. [Google Scholar]
- Safaric, R.; Rodic, J. Decentralized neural-network sliding-mode robot controller. In Proceedings of the 2000 26th Annual Conference of the IEEE Industrial Electronics Society, Nagoya, Japan, 22–28 October 2000; pp. 906–911. [Google Scholar]
- Zhang, J.; Li, Y.; Wu, X. Neural network identification and control for nonlinear dynamic systems with time delay. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 3524–3529. [Google Scholar]
- Wang, L.; Chen, Y.; Li, S.; Liu, C. 2DOF manipulator tracking control based on fuzzy CMAC neural network dynamic inversion. In Proceedings of the 2010 International Conference on Intelligent Computing and Integrated Systems, Guilin, China, 22–24 October 2010; pp. 315–318. [Google Scholar]
- Dávalos, U.G.; Castañeda, C.E.; Esquivel, P.; Jurado, F.Z.; Morfín, O.A. Recurrent Neural Identification on Xilinx system generator using V7 FPGA for a 2DOF robot manipulator. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016. [Google Scholar]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef]
- Castaneda, C.E.; Loukianov, A.G.; Sanchez, E.N.; Bernardino, C.-T. Discrete-time neural sliding-mode block control for a dc motor with controlled flux. IEEE Trans. Ind. Electron. 2012, 59, 1194–1207. [Google Scholar] [CrossRef]
- Jouila, A.; Nouri, K. An adaptive robust nonsingular fast terminal sliding mode controller based on wavelet neural network for a 2-DOF robotic arm. J. Frankl. Inst. 2020, 357, 13259–13282. [Google Scholar] [CrossRef]
- Bekir, C. Modelling and Controlling of a 3DOF Robot Manipulator with Artificial Neural Networks. Int. J. Sci. Res. Mech. Mater. Eng. 2018, 2, 2457. [Google Scholar]
- Andres, O.P.-L.; Ramon, G.-H.; Victor, S.; Jorge, V.C. Experimental Evaluation of a Sectorial Fuzzy Controller Plus Adaptative Neural Network Compensation Applied to a 2-DOF Robot Manipulator. In Proceedings of the 13th IFAC Workshop on Adaptative and Learning Control Systems ALCOS 2019, Winchester, UK, 4–6 December 2019. [Google Scholar]
- Jafar, T.; Afshar, S.J.; Muhammad, A.D. A new method for position control of a 2-DOF robot arm using neuro-fuzzy controller. Indian J. Sci. Technol. 2012, 5, 2253–2257. [Google Scholar]
- Bahoura, M.; Ezzaidi, H. FPGA-implementation of a sequential adaptive noise canceller using Xilinx System Generator. In Proceedings of the 2009 International Conference on Microelectronics—ICM, Marrakech, Morocco, 19–22 December 2009. [Google Scholar]
- Vasquez, V.; Echeverry, J.M.; Contreras, D.E. Design and Statistical Validation of Spark Ignition Engine Electronic Control Unit for Hardware-in-the-Loop Testing. IEEE Lat. Am. Trans. 2017, 15, 1376–1383. [Google Scholar] [CrossRef]
- Reyes, F.; Kelly, R. Experimental evaluation of identification schemes on a direct drive robot. Robotica 1997, 15, 563–571. [Google Scholar] [CrossRef]
- Spong, M.W.; Vidyasagar, M. Robot Dynamics and Control; Jhonn Wiley and Sons Inc.: New York, NY, USA, 1989. [Google Scholar]
- Kazantzis, N.; Kravaris, C. Time-discretization of nonlinear control systems via Taylor methods. Comput. Chem. Eng. 1999, 23, 763–784. [Google Scholar] [CrossRef]
- Jurado, F.; Flores, M.A.; Santibanez, V.; Llama, M.A.; Castaneda, C.E. Continuous-Time Neural Identification for a 2 DOF Vertical Robot Manipulator. In Proceedings of the 2011 IEEE Electronics, Robotics and Automotive Mechanics Conference, Cuernavaca, Morelos, Mexico, 15–18 November 2011. [Google Scholar]
- Castañeda, C.E.; Esquivel, P. Decentralized neural identifier and control for nonlinear systems based on extended Kalman filter. Neural Netw. 2012, 31, 81–87. [Google Scholar] [CrossRef] [PubMed]
- Loukianov, A.G. Robust block decomposition sliding mode control design. Math. Probl. Eng. 2002, 8, 349–365. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Utilization Summary | Neural Identifier (RHONN + EKF) | Control System (RHONN + EKF + SMC) | ||
|---|---|---|---|---|
| Used | % | Used | % | |
| Slices | 62,754 | 9 | 262,692 | 43 |
| FFs | 1983 | 13 | 3009 | 20 |
| BRAM | 0 | 0 | 0 | 0 |
| LUTs | 242,464 | 39 | 199,938 | 99 |
| IOB | 76 | 10 | 78 | 11 |
| Mults/DSP48s | 1818 | 64 | 2796 | 99 |
| TBUFs | 0 | 0 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Davalos-Guzman, U.; Castañeda, C.E.; Aguilar-Lobo, L.M.; Ochoa-Ruiz, G. Design and Implementation of a Real Time Control System for a 2DOF Robot Based on Recurrent High Order Neural Network Using a Hardware in the Loop Architecture. Appl. Sci. 2021, 11, 1154. https://doi.org/10.3390/app11031154
Davalos-Guzman U, Castañeda CE, Aguilar-Lobo LM, Ochoa-Ruiz G. Design and Implementation of a Real Time Control System for a 2DOF Robot Based on Recurrent High Order Neural Network Using a Hardware in the Loop Architecture. Applied Sciences. 2021; 11(3):1154. https://doi.org/10.3390/app11031154
Chicago/Turabian StyleDavalos-Guzman, Ulises, Carlos E. Castañeda, Lina Maria Aguilar-Lobo, and Gilberto Ochoa-Ruiz. 2021. "Design and Implementation of a Real Time Control System for a 2DOF Robot Based on Recurrent High Order Neural Network Using a Hardware in the Loop Architecture" Applied Sciences 11, no. 3: 1154. https://doi.org/10.3390/app11031154
APA StyleDavalos-Guzman, U., Castañeda, C. E., Aguilar-Lobo, L. M., & Ochoa-Ruiz, G. (2021). Design and Implementation of a Real Time Control System for a 2DOF Robot Based on Recurrent High Order Neural Network Using a Hardware in the Loop Architecture. Applied Sciences, 11(3), 1154. https://doi.org/10.3390/app11031154