
On the Influence of Human Factors on Safety of Remotely-Controlled Merchant Vessels



Abstract
1. Introduction
2. Materials and Methods
3. Results
4. Discussion
4.1. Results and Their Significance
4.2. Limitations
- Relatively small research sample—it has been decided by the authors that only persons directly involved in previous research (in academia or industry) on the development of MASS were involved in the herein expert study. This was done in order to avoid uninformed answers, as well as to improve their quality. However, such a condition caused significant narrowing of the research sample, as MASS remains a rather niche specialization within the entire maritime industry. Thus, the number of the experts that could qualify as participants was very limited. This factor could render the results unrepresentative. Moreover, the scarcity of data did not allow for a more advanced statistical analysis;
- Ambiguity of questions asked—the fact that the MASS experts were preferred for the study over persons involved in human factors analyses might bring about some misunderstandings of the survey. The explanation of how particular causal categories are defined was presented to the respondents before filling the questionnaire and was available to them at any moment of the survey. However, certain inevitable limitations are always embedded within the expert study such as this [43]; and
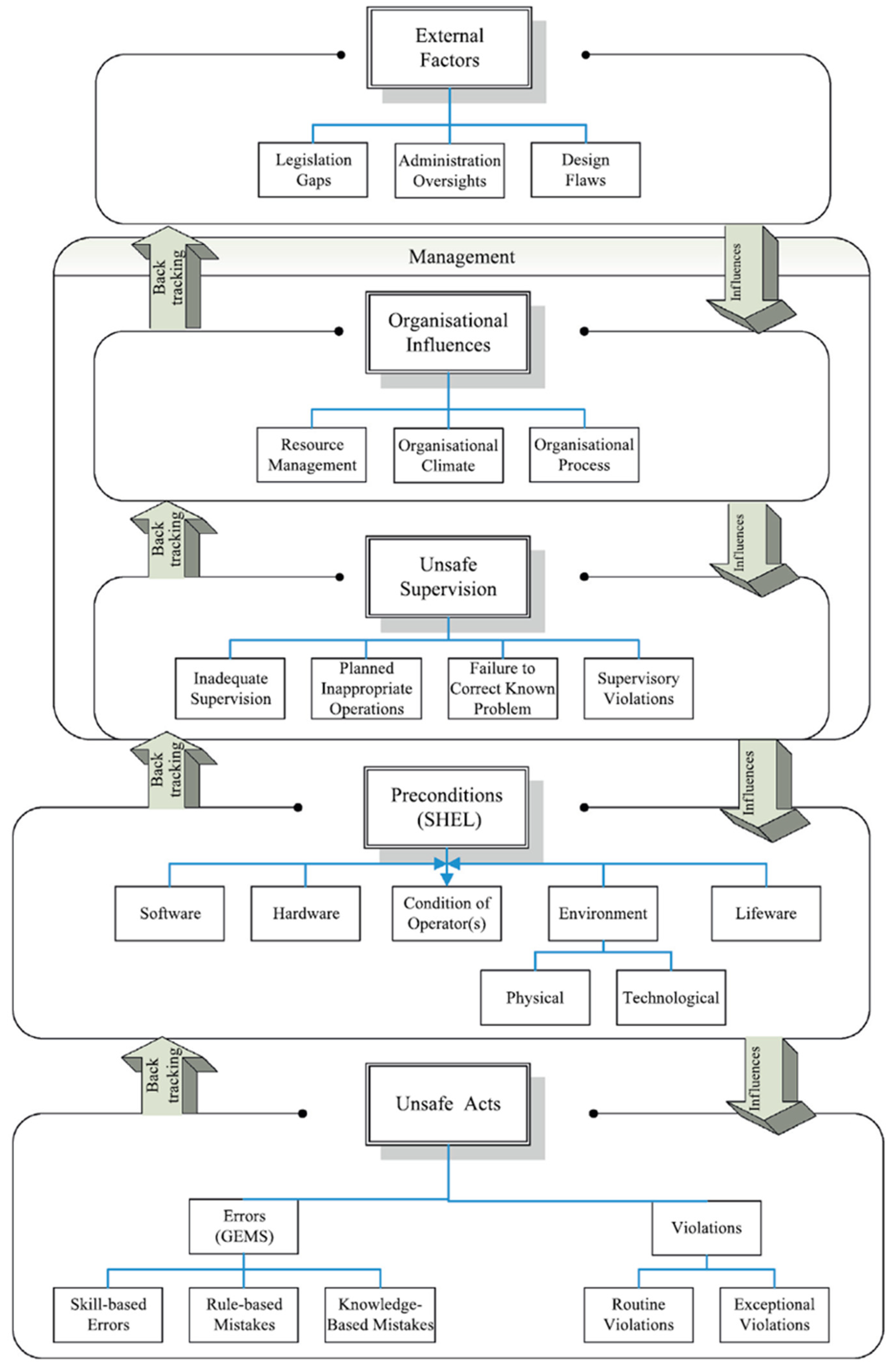
- Erroneous framework—the research used the maritime-oriented variant of a widely used HFACS framework as a foundation. However, HFACS–MA was developed in 2013 [31] and may not accurately reflect the subsequent development of the maritime industry in the direction of autonomy.
4.3. Further Research
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ME = 34.00 SD = 26.59 AV = 37.78 | External Factors | |||
|---|---|---|---|---|
| Legislation Gaps | Administration Oversights | Design Flaws | ||
| Organisational influences | Resource management | ME = 34.50 SD = 27.86 AV = 38.56 | ME = 44.50 SD = 23.19 AV = 47.88 | ME = 27.50 SD = 24.11 AV = 30.16 |
| Organisational climate | ME = 37.50 SD = 28.74 AV = 40.19 | ME = 37.00 SD = 28.12 AV = 41.28 | ME = 30.50 SD = 23.85 AV = 30.59 | |
| Organisational process | ME = 32.50 SD = 30.64 AV = 40.50 | ME = 31.50 SD = 23.17 AV = 37.37 | ME = 33.00 SD = 23.21 AV = 33.50 | |
| ME = 40.00 SD = 25.64 AV = 44.82 | Organisational Influences | |||
|---|---|---|---|---|
| Resource Management | Organisational Climate | Organisational Process | ||
| Unsafe supervision | Inadequate supervision | ME = 43.00 SD = 28.71 AV = 48.44 | ME = 41.50 SD = 28.92 AV = 45.25 | ME = 36.50 SD = 24.36 AV = 47.75 |
| Planned inappropriate operation | ME = 40.50 SD = 23.99 AV = 44.00 | ME = 41.00 SD = 21.18 AV = 43.22 | ME = 36.00 SD = 17.54 AV = 37.57 | |
| Failure to correct known problem | ME = 40.00 SD = 25.23 AV = 47.34 | ME = 39.00 SD = 25.55 AV = 42.81 | ME = 46.00 SD = 24.51 AV = 46.63 | |
| Supervisory violations | ME = 49.50 SD = 26.41 AV = 45.75 | ME = 36.50 SD = 28.19 AV = 43.50 | ME = 44.50 SD = 28.40 AV = 45.06 | |
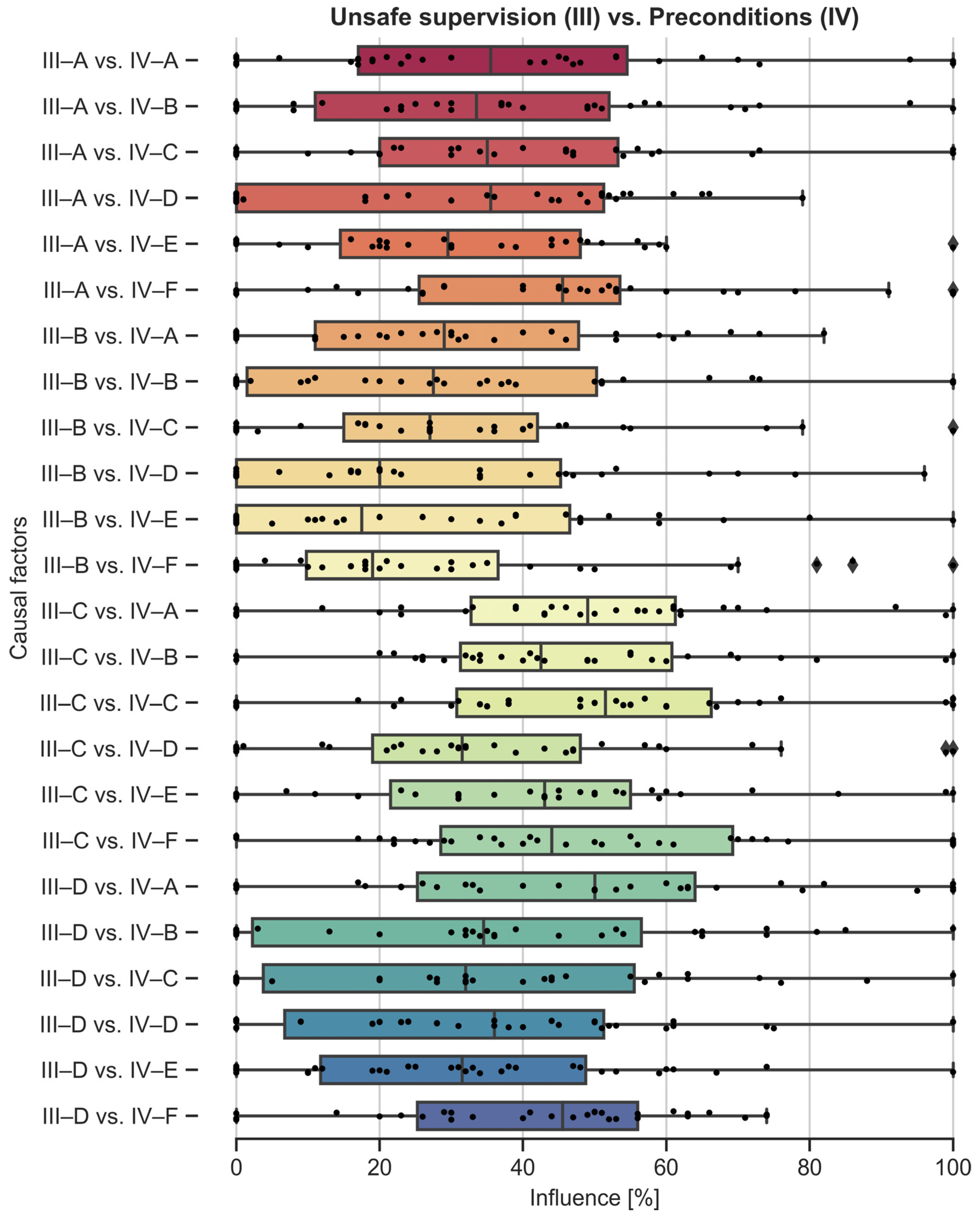
| ME = 34.00 SD = 27.03 AV = 36.33 | Unsafe Supervision | ||||
|---|---|---|---|---|---|
| Inadequate Supervision | Planned Inappropriate Operation | Failure to Correct Known Problem | Supervisory Violations | ||
| Preconditions | Condition of operator(s) | ME = 35.50 SD = 30.11 AV = 39.75 | ME = 29.00 SD = 23.90 AV = 30.44 | ME = 49.00 SD = 25.52 AV = 47.66 | ME = 50.00 SD = 29.92 AV = 48.03 |
| Software | ME = 33.50 SD = 27.38 AV = 35.53 | ME = 27.50 SD = 28.66 AV = 30.53 | ME = 42.50 SD = 25.29 AV = 47.44 | ME = 34.50 SD = 29.12 AV = 36.06 | |
| Hardware | ME = 35.00 SD = 26.28 AV = 37.72 | ME = 27.00 SD = 27.02 AV = 32.38 | ME = 51.50 SD = 28.76 AV = 48.72 | ME = 32.00 SD = 27.89 AV = 34.63 | |
| Physical environment | ME = 35.50 SD = 24.74 AV = 31.19 | ME = 20.00 SD = 25.73 AV = 27.03 | ME = 31.00 SD = 21.64 AV = 31.17 | ME = 36.00 SD = 26.28 AV = 33.75 | |
| Technological environment | ME = 29.00 SD = 20.00 AV = 28.52 | ME = 17.50 SD = 26.52 AV = 27.09 | ME = 43.00 SD = 26.49 AV = 40.47 | ME = 31.00 SD = 21.37 AV = 30.52 | |
| Liveware | ME = 45.00 SD = 25.60 AV = 41.03 | ME = 18.00 SD = 19.09 AV = 21.97 | ME = 44.00 SD = 27.50 AV = 48.81 | ME = 45.50 SD = 22.82 AV = 39.56 | |
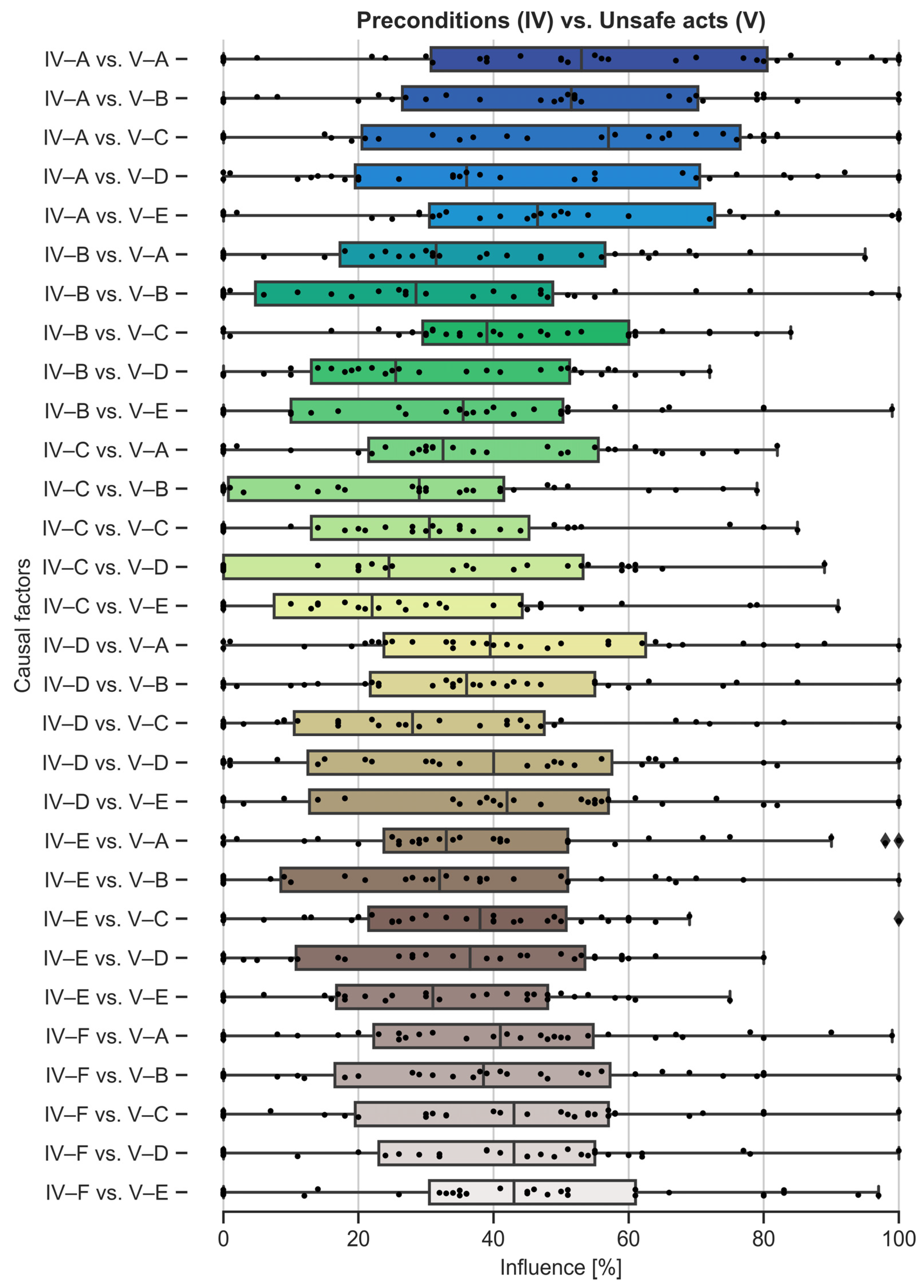
| ME = 36.00 SD = 26.98 AV = 37.73 | Preconditions | ||||||
|---|---|---|---|---|---|---|---|
| Condition of Operator(s) | Software | Hardware | Physical Environment | Technological Environment | Liveware | ||
| Unsafe acts | Skill-based errors | ME = 53.00 SD = 32.26 AV = 53.59 | ME = 31.50 SD = 25.73 AV = 35.75 | ME = 32.50 SD = 23.85 AV = 35.69 | ME = 39.50 SD = 26.00 AV = 43.16 | ME = 31.00 SD = 22.88 AV = 33.87 | ME = 41.00 SD = 26.40 AV = 40.06 |
| Rule-based mistakes | ME = 51.50 SD = 28.73 AV = 48.84 | ME = 28.50 SD = 27.95 AV = 32.44 | ME = 29.00 SD = 23.66 AV = 27.31 | ME = 36.00 SD = 24.87 AV = 37.84 | ME = 32.00 SD = 26.52 AV = 33.13 | ME = 38.50 SD = 27.40 AV = 39.19 | |
| Knowledge-based mistakes | ME = 57.00 SD = 31.39 AV = 48.81 | ME = 39.00 SD = 21.44 AV = 41.34 | ME = 30.50 SD = 23.43 AV = 30.59 | ME = 28.00 SD = 26.77 AV = 33.69 | ME = 36.00 SD = 19.54 AV = 34.45 | ME = 43.00 SD = 26.11 AV = 40.28 | |
| Routine violations | ME = 36.00 SD = 30.43 AV = 44.00 | ME = 25.50 SD = 22.05 AV = 30.63 | ME = 24.50 SD = 25.08 AV = 30.38 | ME = 40.00 SD = 27.80 AV = 37.09 | ME = 36.50 SD = 24.11 AV = 33.97 | ME = 43.00 SD = 25.43 AV = 38.84 | |
| Exceptional violations | ME = 46.50 SD = 30.19 AV = 49.38 | ME = 35.50 SD = 26.51 AV = 34.28 | ME = 22.00 SD = 24.85 AV = 27.44 | ME = 42.00 SD = 29.35 AV = 40.91 | ME = 31.00 SD = 20.75 AV = 31.63 | ME = 43.00 SD = 27.79 AV = 42.97 | |
References
- Kooij, C.; Colling, A.P.; Benson, C.L. When will autonomous ships arrive? A technological forecasting perspective. In Proceedings of the International Naval Engineering Conference and Exhibition (INEC), Glasgow, UK, 2–4 October 2018; Volume 14. [Google Scholar]
- Hogg, T.; Ghosh, S. Autonomous merchant vessels: Examination of factors that impact the effective implementation of unmanned ships. Aust. J. Marit. Ocean Aff. 2016, 8, 206–222. [Google Scholar] [CrossRef]
- Ahvenjärvi, S. The Human Element and Autonomous Ships. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 517–521. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. System-theoretic approach to safety of remotely-controlled merchant vessel. Ocean Eng. 2018, 152, 334–345. [Google Scholar] [CrossRef]
- Rødseth, Ø.J. Defining ship autonomy by characteristic factors. In Proceedings of the 1st International Conference on Maritime Autonomous Surface Ships, Busan, Korea, 8–9 November 2018; pp. 19–26. [Google Scholar]
- Rødseth, Ø.J.; Nordahl, H. Definitions for Autonomous Merchant Ships; Norwegian Forum for Autonomous Ships: Trondheim, Norway, 2017. [Google Scholar]
- International Maritime Organization, Maritime Safety Committee. Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (MASS); Maritime Safety Committee: London, UK, 2018. [Google Scholar]
- Chae, C.; Kim, M.; Kim, H. A Study on Identification of Development Status of MASS Technologies and Directions of Improvement. Appl. Sci. 2020, 10, 4564. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J. A method for uncertainty assessment and communication in safety-driven design—A case study of unmanned merchant vessel. Int. J. Saf. Sci. 2018, 2, 104–115. [Google Scholar] [CrossRef]
- Ringbom, H. Regulating Autonomous Ships—Concepts, Challenges and Precedents. Ocean Dev. Int. Law 2019, 50, 141–169. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Liu, Z.J.; Wu, Z.L.; Wang, F.W. Quantitative Processing of Situation Awareness for Autonomous Ships Navigation. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 25–31. [Google Scholar] [CrossRef]
- Ventikos, N.P.; Chmurski, A.; Louzis, K. A systems-based application for autonomous vessels safety: Hazard identification as a function of increasing autonomy levels. Saf. Sci. 2020, 131, 104919. [Google Scholar] [CrossRef]
- Porathe, T.; Hoem, Å.; Johnsen, S. At least as safe as manned shipping? Autonomous shipping, safety and “human error”. In Safety and Reliability–Safe Societies in a Changing World, Proceedings of ESREL 2018, Trondheim, Norway, 17–21 June 2018; Haugen, S., Ed.; CRC Press: Boca Raton, FL, USA, 2018; pp. 417–425. [Google Scholar]
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship—Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- Valdez Banda, O.A.; Kannos, S.; Goerlandt, F.; van Gelder, P.H.A.J.M.; Bergström, M.; Kujala, P. A systemic hazard analysis and management process for the concept design phase of an autonomous vessel. Reliab. Eng. Syst. Saf. 2019, 191, 106584. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Francis, F.J. A Review of the current Collision Regulations to accommodate Multiple Ship Situations and MASS. J. Physics Conf. Ser. 2019, 1357, 012011. [Google Scholar] [CrossRef]
- Veitch, E.; Hynnekleiv, A.; Lützhöft, M. The operator’s stake in shore control centre design: A stakeholder analysis for autonomous ships. In Proceedings of the RINA, Royal Institution of Naval Architects—International Conference on Human Factors 2020 Papers, London, UK, 19–20 February 2020; RINA: London, UK, 2020; pp. 23–30. [Google Scholar]
- Porathe, T.; Prison, J.; Man, Y. Situation awareness in remote control centres for unmanned ships. In Proceedings of the Human Factors in Ship Design & Operation, London, UK, 26–27 February 2014. [Google Scholar]
- Utne, I.B.; Rokseth, B.; Sørensen, A.J.; Vinnem, J.E. Towards supervisory risk control of autonomous ships. Reliab. Eng. Syst. Saf. 2020, 196, 106757. [Google Scholar] [CrossRef]
- Thieme, C.A.; Utne, I.B. Safety performance monitoring of autonomous marine systems. Reliab. Eng. Syst. Saf. 2017, 159, 264–275. [Google Scholar] [CrossRef]
- Burmeister, H.-C.; Bruhn, W.C.; Rødseth, Ø.J.; Porathe, T. Can unmanned ships improve navigational safety? In Proceedings of the Transport Research Arena, Paris, France, 14–17 February 2014. [Google Scholar]
- Ramos, M.A.; Utne, I.B.; Mosleh, A. Collision avoidance on maritime autonomous surface ships: Operators’ tasks and human failure events. Saf. Sci. 2019, 116, 33–44. [Google Scholar] [CrossRef]
- Yoshida, M.; Shimizu, E.; Sugomori, M.; Umeda, A. Regulatory Requirements on the Competence of Remote Operator in Maritime Autonomous Surface Ship: Situation Awareness, Ship Sense and Goal-Based Gap Analysis. Appl. Sci. 2020, 10, 8751. [Google Scholar] [CrossRef]
- Man, Y.; Lundh, M.; Porathe, T. Seeking Harmony in Shore-based Unmanned Ship Handling-From the Perspective of Human Factors, What Is the Difference We Need to Focus on from Being Onboard to Onshore? In Proceedings of the Advances in Human Aspects of Transportation: Part I, Boca Raton, FL, USA, 19–23 July 2014; Volume 7, p. 231. [Google Scholar]
- Zhang, M.; Zhang, D.; Yao, H.; Zhang, K. A probabilistic model of human error assessment for autonomous cargo ships focusing on human—Autonomy collaboration. Saf. Sci. 2020, 130, 104838. [Google Scholar] [CrossRef]
- Ramos, M.; Thieme, C.; Utne, I.; Mosleh, A. Human-System Concurrent Task Analysis for Maritime Autonomous Surface Ship Operation and Safety. Reliab. Eng. Syst. Saf. 2019, 195, 106697. [Google Scholar] [CrossRef]
- Man, Y.; Weber, R.; Cimbritz, J.; Lundh, M.; MacKinnon, S.N. Human factor issues during remote ship monitoring tasks: An ecological lesson for system design in a distributed context. Int. J. Ind. Ergon. 2018, 68, 231–244. [Google Scholar] [CrossRef]
- Baldauf, M.; Fischer, S.; Kitada, M.; Mehdi, R.A.; Al-Quhali, M.A.; Fiorini, M. Merging Conventionally Navigating Ships and MASS—Merging VTS, FOC and SCC? TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 495–501. [Google Scholar] [CrossRef]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Chen, S.; Wall, A.; Davies, P.; Yang, Z.; Wang, J.; Chou, Y. A Human and Organisational Factors (HOFs) analysis method for marine casualties using HFACS-Maritime Accidents (HFACS-MA). Saf. Sci. 2013, 60, 105–114. [Google Scholar] [CrossRef]
- Shappell, S.A.; Wiegmann, D.A. The Human Factors Analysis and Classification System—HFACS; Federal Aviation Administration: Oklahoma City, OK, USA, 2000.
- Zhang, M.; Zhang, D.; Goerlandt, F.; Yan, X.; Kujala, P. Use of HFACS and fault tree model for collision risk factors analysis of icebreaker assistance in ice-covered waters. Saf. Sci. 2019, 111, 128–143. [Google Scholar] [CrossRef]
- Chae, C. A study on FSA application for human errors of dynamic positioning vessels incidents. J. Navig. Port Res. 2017, 41, 259–268. [Google Scholar] [CrossRef]
- Lenné, M.G.; Salmon, P.M.; Liu, C.C.; Trotter, M. A systems approach to accident causation in mining: An application of the HFACS method. Accid. Anal. Prev. 2012, 48, 111–117. [Google Scholar] [CrossRef] [PubMed]
- Reinach, S.; Viale, A. Application of a human error framework to conduct train accident/incident investigations. Accid. Anal. Prev. 2006, 38, 396–406. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, W.; Zhou, J.; Zuo, Q.; Wu, R.; Tang, Z. The Failure Route between Active and Latent Error in Bus Accident. IEEE Access 2019, 7, 164941–164951. [Google Scholar] [CrossRef]
- Khan, R.U.; Yin, J.; Mustafa, F.S.; Liu, H. Risk Assessment and Decision Support for Sustainable Traffic Safety in Hong Kong Waters. IEEE Access 2020, 8, 72893–72909. [Google Scholar] [CrossRef]
- Larouzée, J.; Guarnieri, F. From theory to practice: Itinerary of Reasons’ Swiss Cheese Model. In Proceedings of the Safety and Reliability of Complex Engineered Systems: ESREL 2015, Zurich, Switzerland, 28 September 2015; pp. 817–824. [Google Scholar]
- Goerlandt, F. Maritime Autonomous Surface Ships from a risk governance perspective: Interpretation and implications. Saf. Sci. 2020, 128, 104758. [Google Scholar] [CrossRef]
- Wróbel, K.; Gil, M.; Montewka, J. Identifying research directions of a remotely-controlled merchant ship by revisiting her system-theoretic safety control structure. Saf. Sci. 2020, 129, 104797. [Google Scholar] [CrossRef]
- Xue, J.; Van Gelder, P.H.A.J.M.; Reniers, G.; Papadimitriou, E.; Wu, C. Multi-attribute decision-making method for prioritizing maritime traffic safety influencing factors of autonomous ships’ maneuvering decisions using grey and fuzzy theories. Saf. Sci. 2019, 120, 323–340. [Google Scholar] [CrossRef]
- Rae, A.; Alexander, R. Forecasts or fortune-telling: When are expert judgements of safety risk valid? Saf. Sci. 2017. [Google Scholar] [CrossRef]
- Relling, T.; Lützhöft, M.; Ostnes, R.; Hildre, H.P. A Human Perspective on Maritime Autonomy. In Proceedings of the International Conference on Augmented Cognition, Las Vegas, NV, USA, 5–20 July 2018; Schmorrow, D.D., Fidopiastis, C.M., Eds.; Springer Nature: Cham, Switzerland, 2018; pp. 350–362. [Google Scholar]
- Størkersen, K.V. Safety management in remotely controlled vessel operations. Mar. Policy 2020, 104349. [Google Scholar] [CrossRef]







| DoA | Description | Definition |
|---|---|---|
| 1 | Ship with automated processes and decision support | Seafarers are on board to operate and control shipboard systems and functions. Some operations may be automated. |
| 2 | Remotely controlled ship with seafarers on board | The ship is controlled and operated from another location, but seafarers are on board. |
| 3 | Remotely controlled ship without seafarers on board | Remotely controlled ship without seafarers on board: The ship is controlled and operated from another location. There are no seafarers on board. |
| 4 | Fully autonomous ship | The operating system of the ship is able to make decisions and determine actions by itself |
| Level & Factor Reference | Name | Description |
|---|---|---|
| I | External factors | |
| A | Legislation gaps | the deficiencies of existing rules or codes that guide the maritime industry and relevant authorities |
| B | Administration oversights | the deficiencies of the governing authorities in implementing the existence rules or codes, or the negligence in performing their duties |
| C | Design flaws | poor system design, such as poor consideration on ergonomics and maintainability of the system/components |
| II | Organisational influences | |
| A | Resource management | encompasses the realm of corporate-level decision making regarding the allocation and maintenance of organisational assets (such as personnel, money, equipment and facilities) |
| B | Organisational climate | the working atmosphere within the organisation which includes culture, policies and structure |
| C | Organisational process | refers to corporate decisions and rules that govern the everyday activities within the organisation. This includes the establishment/use of standard operational procedures, and formal methods for maintaining oversight of the workforce |
| III | Unsafe supervision | |
| A | Inadequate supervision | the factors that supervision fails to identify a hazard, recognize and control risk, provide guidance, training and/or oversight, etc., resulting in human error or an unsafe situation |
| B | Planned inappropriate operation | the factors that supervision fails to adequately assess the hazards associated with an operation and allow for unnecessary risks |
| C | Failure to correct known problem | the factors that supervision fails to correct known deficiencies in documents, processes or procedures, or fails to correct inappropriate or unsafe actions of individuals create an unsafe situation |
| D | Supervisory violations | the factors that supervision wilfully disregards instructions, guidance, rules or operating instructions whilst managing organisational assets create an unsafe situation |
| IV | Preconditions | |
| A | Condition of operator(s) | the conditions of an individual that have adverse influence to perform his/her job, i.e. mental and physiological status and mental/physical limitations of the practitioners |
| B | Software | the non-physical part of the system including organisational policies, procedures, manuals, checklist layouts, charts, maps, advisories and increasing computer programs |
| C | Hardware | the physical parts of the workplace. It includes the equipment of work stations, displays, controls and seats, etc. |
| D | Physical environment | The factors of nature environment which can affect the actions of individuals result in human error or an unsafe situation |
| E | Technological environment | The factors emphasize on the artificial environmental constructions, e.g. harbours, waterways and traffic control issues |
| F | Liveware | the peripheral livewares refer to system’s human–human interactions, including such factors as managements, supervision, crew interactions and communications |
| V | Unsafe acts | |
| A | Skill-based errors | errors involve slips and lapse. Slips are an unintentional action where the failure involves attention whilst lapses are an unintentional action where the failure involves memory |
| B | Rule-based mistakes | mistakes involve inappropriate matching of environmental signs to the situational component of well-tried troubleshooting rules |
| C | Knowledge-based mistakes | mistakes happen when an individual has run out of applicable problem-solving routines and is forced to work ‘on-line’, using slow, sequential, laborious and resource limited conscious processing |
| D | Routine violations | causal factors tend to be habitual by nature and often tolerated by governing authority. They occur every day as people regularly modify or do not strictly comply with work procedures, often because of poorly designed or defined work practices |
| E | Exceptional violations | causal factors tend to be a one-time breach of a work practice, such as safety regulations being deliberately ignored to carry out a task. Even so, the intention was not to commit a malevolent act but just to get the job done |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wróbel, K.; Gil, M.; Chae, C.-J. On the Influence of Human Factors on Safety of Remotely-Controlled Merchant Vessels. Appl. Sci. 2021, 11, 1145. https://doi.org/10.3390/app11031145
Wróbel K, Gil M, Chae C-J. On the Influence of Human Factors on Safety of Remotely-Controlled Merchant Vessels. Applied Sciences. 2021; 11(3):1145. https://doi.org/10.3390/app11031145
Chicago/Turabian StyleWróbel, Krzysztof, Mateusz Gil, and Chong-Ju Chae. 2021. "On the Influence of Human Factors on Safety of Remotely-Controlled Merchant Vessels" Applied Sciences 11, no. 3: 1145. https://doi.org/10.3390/app11031145
APA StyleWróbel, K., Gil, M., & Chae, C.-J. (2021). On the Influence of Human Factors on Safety of Remotely-Controlled Merchant Vessels. Applied Sciences, 11(3), 1145. https://doi.org/10.3390/app11031145