
A Novel Approach of Modelling and Predicting Track Cycling Sprint Performance

Abstract
:1. Introduction
2. Materials and Methods
2.1. Physiological Model
2.2. Physical Model
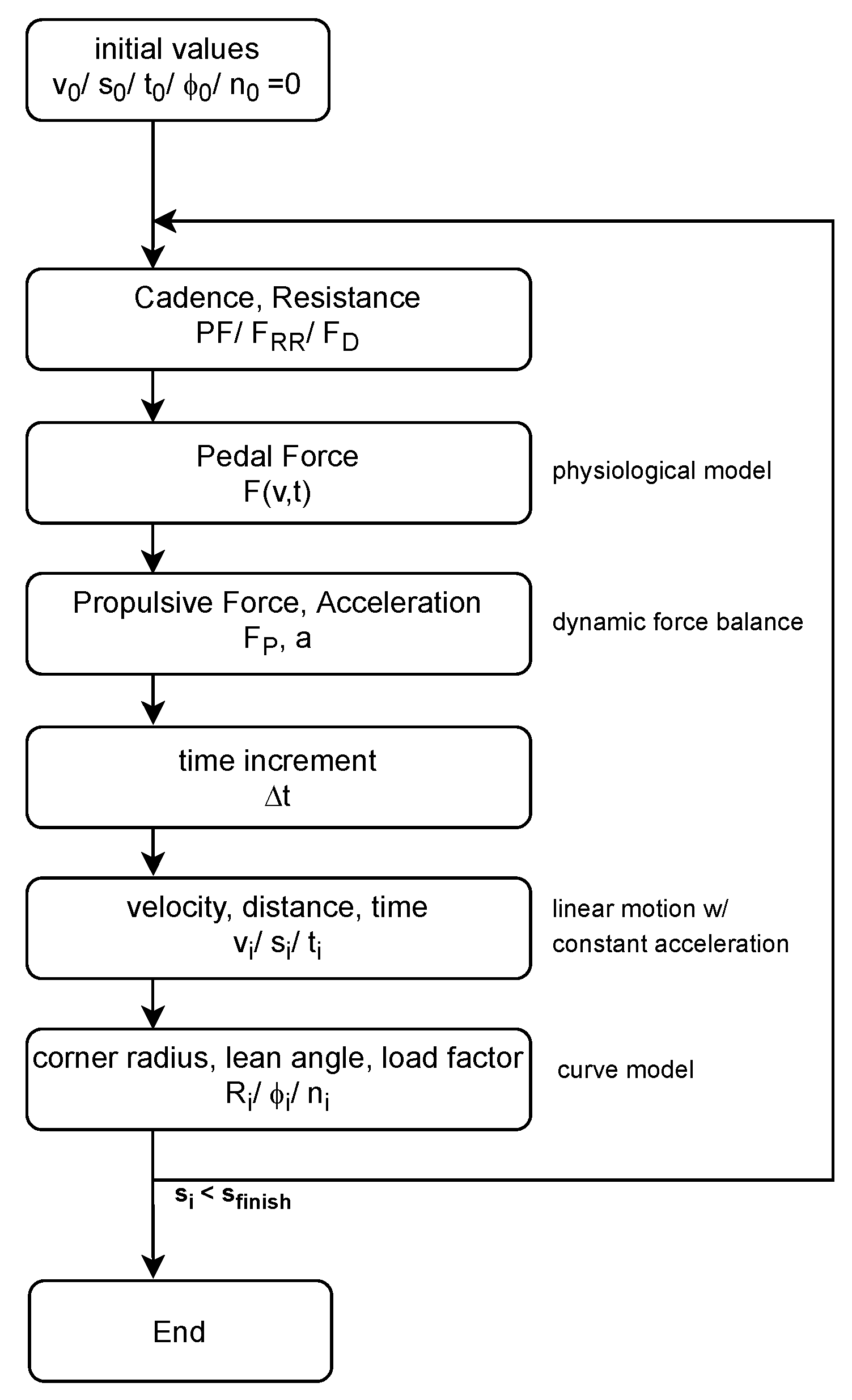
2.3. Implementation
2.4. Determination of Model Parameters
2.4.1. Track Cycling Time Trials
2.4.2. Exercise Protocol
2.4.3. Data Analysis
2.4.4. Statistics
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Craig, N.P.; Norton, K.I. Characteristics of track cycling. Sports Med. 2001, 31, 457–468. [Google Scholar] [CrossRef]
- Douglas, J.; Ross, A.; Martin, J.C. Maximal muscular power: Lessons from sprint cycling. Sports Med. Open 2021, 7, 48. [Google Scholar] [CrossRef]
- Dunst, A.K. Trends und Perspektiven im Radsport—Der Trend großer Übersetzungen und seine Konsequenz für das physiologische Anforderungsprofil im Bahnradsprint. Leistungssport 2021, 5, 34–37. [Google Scholar]
- Olds, T.S. Modelling Human Locomotion: Applications to Cycling. Sports Med. 2001, 31, 497–509. [Google Scholar] [CrossRef]
- Di Prampero, P.E.; Cortili, G.; Mognoni, P.; Saibene, F. Equation of motion of a cyclist. J. Appl. Physiol. 1979, 47, 201–206. [Google Scholar] [CrossRef]
- Olds, T.S.; Norton, K.I.; Craig, N.P. Mathematical model of cycling performance. J. Appl. Physiol. 1993, 75, 730–737. [Google Scholar] [CrossRef] [PubMed]
- Olds, T.S.; Norton, K.I.; Lowe, E.L.; Olive, S.; Ly, S. Modelling road-cycling performance. J. Appl. Physiol. 1995, 78, 1596–1611. [Google Scholar] [CrossRef] [PubMed]
- Fitton, B.; Symons, D. A mathematical model for simulating cycling: Applied to track cycling. Sports Eng. 2018, 21, 409–418. [Google Scholar] [CrossRef]
- Davies, C.T. Effect of air resistance on the metabolic cost and performance of cycling. Eur. J. Appl. Physiol. Occup. Physiol. 1980, 45, 245–249. [Google Scholar] [CrossRef]
- Kyle, C.R. The mechanics and aerodynamics of cycling. Med. Sci. Asp. Cycl. 1988, 235, 251. [Google Scholar]
- Lukes, R.; Carré, M.; Haake, S. Track Cycling: An Analytical Model. In The Engineering of Sport; Moritz, E.F., Haake, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 115–120. [Google Scholar]
- Martin, J.; Gardner, A.S.; Barras, M.; Martin, D.T. Modelling Sprint Cycling Using Field-Derived Parameters and Forward Integration. Med. Sci. Sports Exerc. 2006, 38, 592–597. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Underwood, L.; Jeremy, M. Mathematical model of track cycling: The individual pursuit. Procedia Eng. 2010, 2, 3217–3222. [Google Scholar] [CrossRef] [Green Version]
- Flyger, N.; Froncioni, A.M.; Martin, D.T.; Billaut, F.; Aughey, R.J.; James, C.; Martin, J.C. Modelling track cycling standing start performance: Combining energy supply and energy demand. In Proceedings of the ISBS Conference Proceedings Archive 31th International Conference on Biomechanics in Sports, Taipei, Taiwan, 7–11 July 2013. [Google Scholar]
- Martin, J.C.; Milliken, D.L.; Cobb, J.E.; McFadden, K.L.; Coggan, A.R. Validation of a Mathematical Model for Road Cycling Power. J. Appl. Biomech. 1998, 14, 276–291. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Quod, M.J.; Martin, D.T.; Martin, J.C.; Laursen, P.B. The power profile predicts road cycling MMP. Int. J. Sports Med. 2010, 31, 397–401. [Google Scholar] [CrossRef] [PubMed]
- Ferguson, H.A.; Harnsih, C.; Chase, J.G. Using Field Based Data to Model Sprint Track Cycling Performance. Sports Med. Open 2021, 7, 20. [Google Scholar] [CrossRef]
- Gardner, A.S.; Martin, D.T.; Jenkins, D.G.; Dyer, I.; Achten, J.; Barras, M.; Martin, J.C. Velocity-Specific Fatigue: Quantifying fatigue during variable velocity cycling. Med. Sci. Sports Exerc. 2009, 41, 904–911. [Google Scholar] [CrossRef]
- De Koning, J.J.; Bobbert, M.F.; Foster, C. Determination of optimal pacing strategy in track cycling with an energy flow model. J. Sci. Med. Sport 1999, 2, 266–277. [Google Scholar] [CrossRef]
- McCartney, N.; Heigenhauser, G.J.; Jones, N.L. Power output and fatigue of human muscle in maximal cycling exercise. J. Appl. Physiol. 1983, 55, 218–224. [Google Scholar] [CrossRef]
- Seow, C.Y. Hill’s equation of msucle performance and its hidden insight on molecular mechanisms. J. Gen. Physiol. 2013, 142, 561–573. [Google Scholar] [CrossRef] [Green Version]
- Dorel, S.; Hautier, C.A.; Rambaud, O.; Rouffet, D.; Van Praagh, E.L. Torque and power–velocity relationships in cycling: Relevance to track sprint performance in world-class cyclists. Int. J. Sports Med. 2005, 26, 739–746. [Google Scholar] [CrossRef]
- Gardner, A.S.; Martin, J.C.; Martin, D.T.; Barras, M.; Jenkins, D.G. Maximal torque- and power-pedaling rate relationships for elite sprint cyclists in laboratory and field tests. Eur. J. Appl. Physiol. 2007, 101, 287–292. [Google Scholar] [CrossRef] [PubMed]
- Martin, J.C.; Wagner, B.M.; Coyle, E.F. Inertial-load method determines maximal cycling power in a single exercise bout. Med. Sci. Sports Exerc. 1997, 29, 1505–1512. [Google Scholar] [CrossRef]
- Dorel, S. Maximal force-velocity and power-velocity characteristics in cycling: Assessment and relevance. In Biomechanics of Training and Testing; Morin, J.B., Samozino, P., Eds.; Springer: Cham, Switzerland, 2018; pp. 7–31. [Google Scholar]
- De Ruiter, C.; Jones, D.; Sargeant, A.; De Haan, A. The measurement of force/velocity relationships of fresh and fatigued human adductor pollicis muscle. Eur. J. Appl. Physiol. 1999, 80, 386–393. [Google Scholar] [CrossRef] [PubMed]
- De Ruiter, C.J.; Didden, W.J.M.; Jones, D.A.; De Haan, A. The force-velocity relationship of human adductor pollicis muscle during stretch and the effects of fatigue. J. Physiol. 2000, 526, 671–681. [Google Scholar] [CrossRef]
- Sargeant, A.J. Human power output and muscle fatigue. Int. J. Sports Med. 1994, 15, 116–121. [Google Scholar] [CrossRef]
- Bogdanis, G.C.; Papaspyrou, A.; Theos, A.; Maridaki, M. Influence of resistive load on power output and fatigue during intermittent sprint cycling exercise in children. Eur. J. Appl. Physiol. 2007, 101, 313–320. [Google Scholar] [CrossRef]
- Buttelli, O.; Seck, D.V.; Ewalle, H.; Jouanin, J.C.; Monod, H. Effect of fatigue on maximal velocity and maximal torque during short exhausting cycling. Eur. J. Appl. Physiol. Occup. Physiol. 1996, 73, 175–179. [Google Scholar] [CrossRef] [PubMed]
- Dunst, A.K.; Grüneberger, R.; Holmberg, H.-C. Modelling optimal cadence as a function of time during maximal sprint exercises can improve performance in elite track cyclists. J. Appl. Sci. 2021; under review. [Google Scholar]
- Dunst, A.K.; Hesse, C. Trends und Perspektiven im Radsport—Geschwindigkeitsbasiertes Training in der Praxis. Leistungssport, 2022; 1, in print. [Google Scholar]
- Dunst, A.K. Anwendung von Kraft-Geschwindigkeits-Profilen im Bahnradsport. In Kräftiger, Schneller, Ausdauernder—Entwicklung der Muskulären Leistung im Hochleistungstraining; Lehmann, F., Wenzel, U., Sandau, I., Eds.; Meyer & Meyer Verlag: Aachen, Germany, 2020; pp. 113–120. [Google Scholar]
- Monod, H.; Scherrer, J. The work capacity of a synergic muscular group. Ergonomics 1965, 8, 329–338. [Google Scholar] [CrossRef]
- Doma, K.; Leicht, A.S.; Schumann, M.; Nagata, A.; Senzaki, K.; Woods, C.E. Postactivation potentiation effect of overloaded cycling on subsequent cycling Wingate performance. J. Sports Med. Phys. Fit. 2019, 59, 217–222. [Google Scholar] [CrossRef] [PubMed]
- Mader, A.; Heck, H. Energiestoffwechselregulation, Erweiterung des theoretischen Konzepts und seiner Begründungen—Nachweis der praktischen Nützlichkeit der Simulation des Energiestoffwechsels. Brennpkt. Sportwiss. 1994, 8, 124–162. [Google Scholar]
- Morin, J.B.; Samozino, P.; Edouard, P.; Tomazin, K. Effect of fatigue on force production and force application technique during repeated sprints. J. Biomech. 2011, 44, 2719–2723. [Google Scholar] [CrossRef] [PubMed]
- Jovanovic, M.; Flanagon, E.P. From The Field–Reseached Applications of the Velocity Based Strength Training. Available online: Https://www.strengthandconditioning.org/jasc-22-2/1002-from-the-field-researched-applications-of-velocity-based-strength-training (accessed on 7 October 2019).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Athlete | a | A | c | R | ||
|---|---|---|---|---|---|---|
| STAND | 1 | −6.03 | 1581.51 | 50.17 | 0.00 | 0.93 |
| 2 | −4.63 | 1151.82 | 60.40 | 0.00 | 0.85 | |
| 3 | −7.42 | 2205.73 | 45.69 | 0.00 | 0.96 | |
| 4 | −8.01 | 2190.36 | 56.48 | 0.00 | 0.82 | |
| 5 | −6.80 | 1894.02 | 70.40 | 0.00 | 0.84 | |
| 6 | −7.30 | 2261.81 | 46.02 | 0.00 | 0.94 | |
| SIT | 1 | −4.80 | 754.93 | 77.50 | 340.84 | 0.91 |
| 2 | −4.14 | 912.37 | 86.26 | 0.22 | 0.94 | |
| 3 | −4.88 | 1121.83 | 19.90 | 675.15 | 0.95 | |
| 4 | −4.40 | 1165.73 | 31.22 | 410.83 | 0.93 | |
| 5 | −3.94 | 1107.77 | 28.13 | 414.44 | 0.96 | |
| 6 | −5.30 | 1315.08 | 40.09 | 432.45 | 0.94 |
| First Run | Second Run | ||||
|---|---|---|---|---|---|
| Athlete | k | R | k | R | |
| velocity | 1 | 1.002 | 0.997 | 1.009 | 0.996 |
| 2 | 1.003 | 0.997 | 1.002 | 0.997 | |
| 3 | 1.007 | 0.993 | 1.005 | 0.998 | |
| 4 | 1.003 | 0.995 | 0.998 | 0.998 | |
| 5 | 1.005 | 0.999 | 1.003 | 0.995 | |
| 6 | 1.001 | 0.999 | 1.004 | 0.995 | |
| power output | 1 | 0.969 | 0.959 | 0.988 | 0.975 |
| 2 | 0.973 | 0.958 | 0.992 | 0.969 | |
| 3 | 0.982 | 0.976 | 1.002 | 0.998 | |
| 4 | 0.994 | 0.968 | 0.973 | 0.979 | |
| 5 | 1.018 | 0.936 | 0.989 | 0.968 | |
| 6 | 0.965 | 0.952 | 0.971 | 0.941 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dunst, A.K.; Grüneberger, R. A Novel Approach of Modelling and Predicting Track Cycling Sprint Performance. Appl. Sci. 2021, 11, 12098. https://doi.org/10.3390/app112412098
Dunst AK, Grüneberger R. A Novel Approach of Modelling and Predicting Track Cycling Sprint Performance. Applied Sciences. 2021; 11(24):12098. https://doi.org/10.3390/app112412098
Chicago/Turabian StyleDunst, Anna Katharina, and René Grüneberger. 2021. "A Novel Approach of Modelling and Predicting Track Cycling Sprint Performance" Applied Sciences 11, no. 24: 12098. https://doi.org/10.3390/app112412098
APA StyleDunst, A. K., & Grüneberger, R. (2021). A Novel Approach of Modelling and Predicting Track Cycling Sprint Performance. Applied Sciences, 11(24), 12098. https://doi.org/10.3390/app112412098