
Accurate Measurements of Forest Soil Water Content Using FDR Sensors Require Empirical In Situ (Re)Calibration



Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Sites and Soil Characteristics
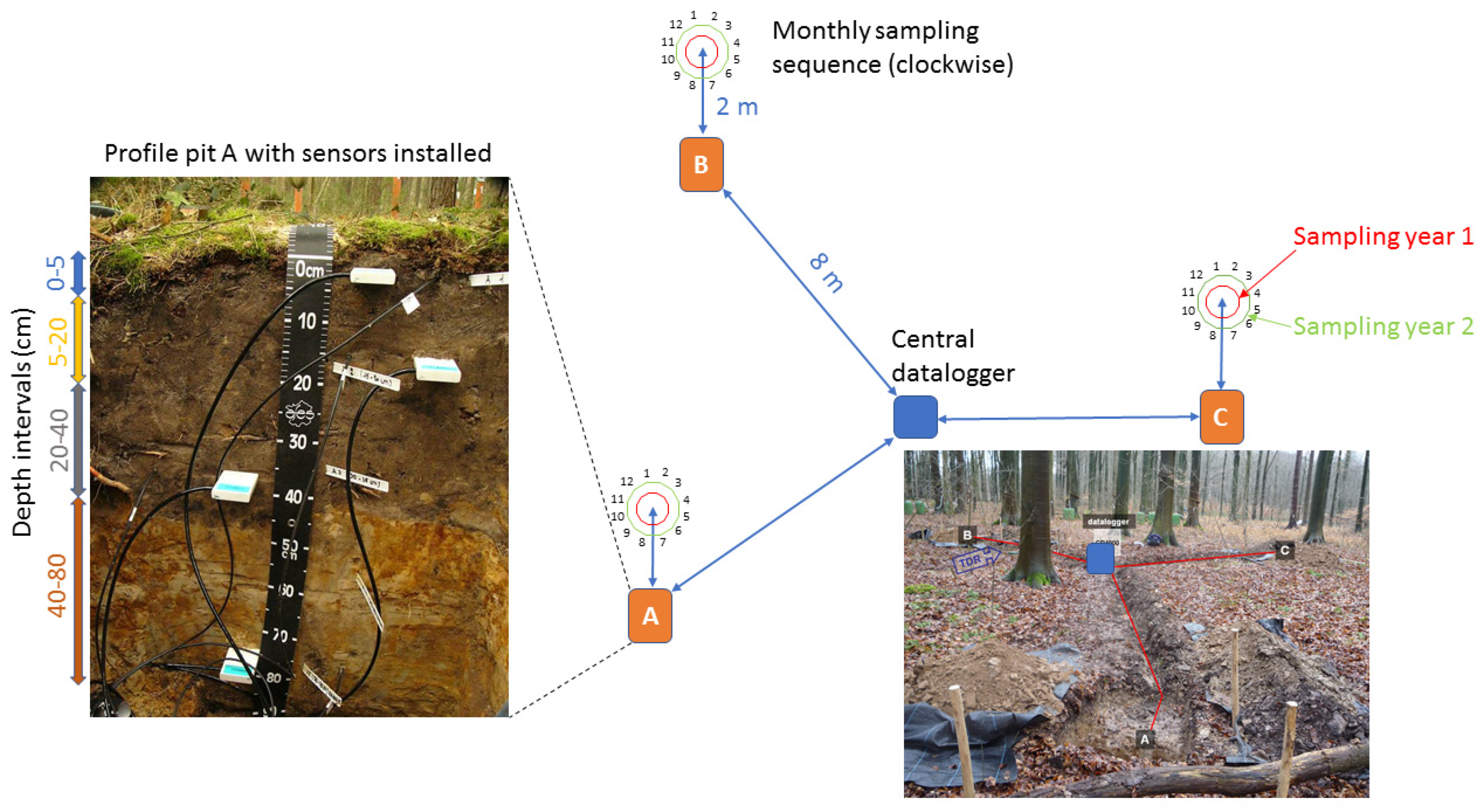
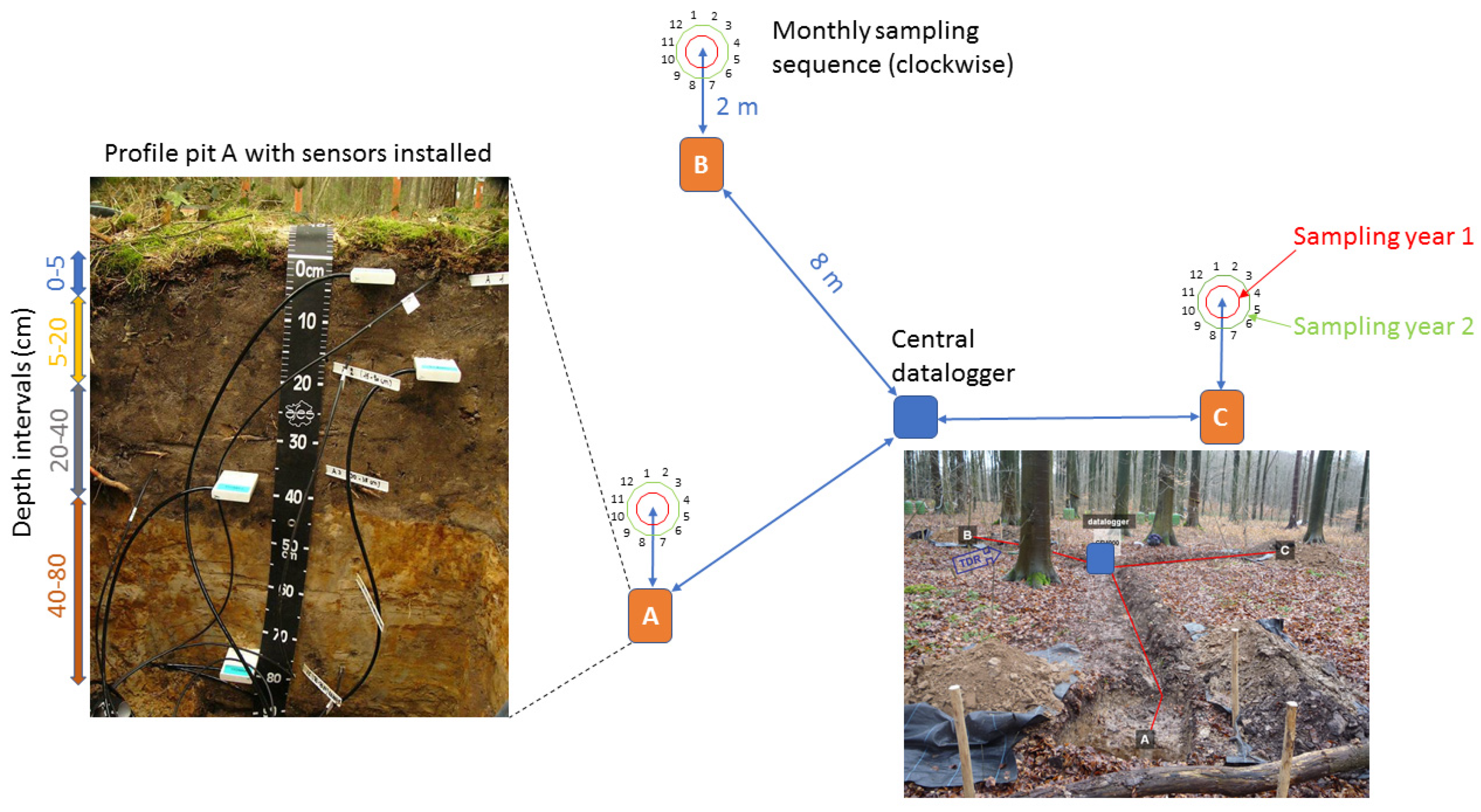
2.2. Monitoring Equipment: Soil Moisture and Temperature Sensors
2.3. Soil Sampling and Analysis
2.4. Calibration Dataset
2.5. Statistical Evaluation
3. Results
3.1. Validation of FDR Measurements
3.1.1. Reference Dataset
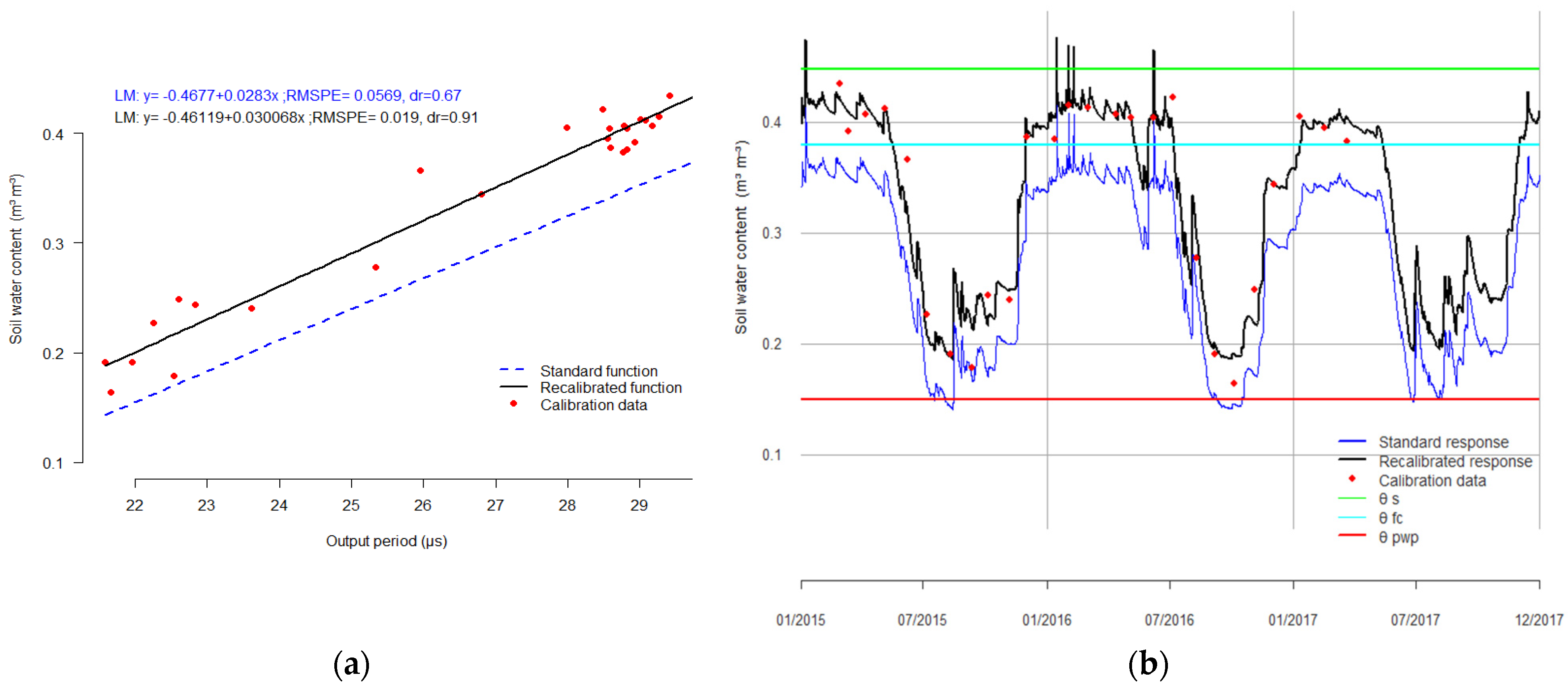
3.1.2. Calibration Testing
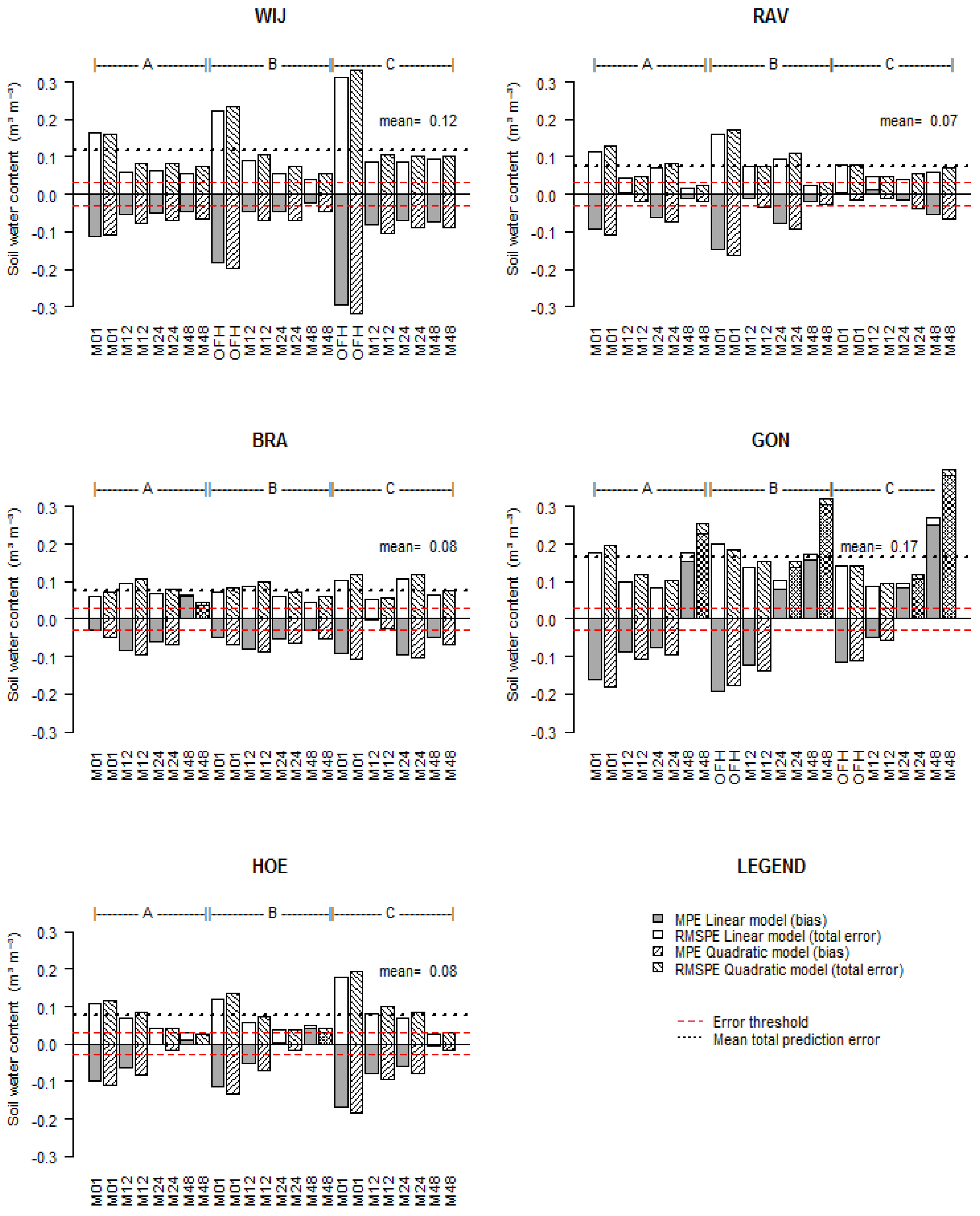
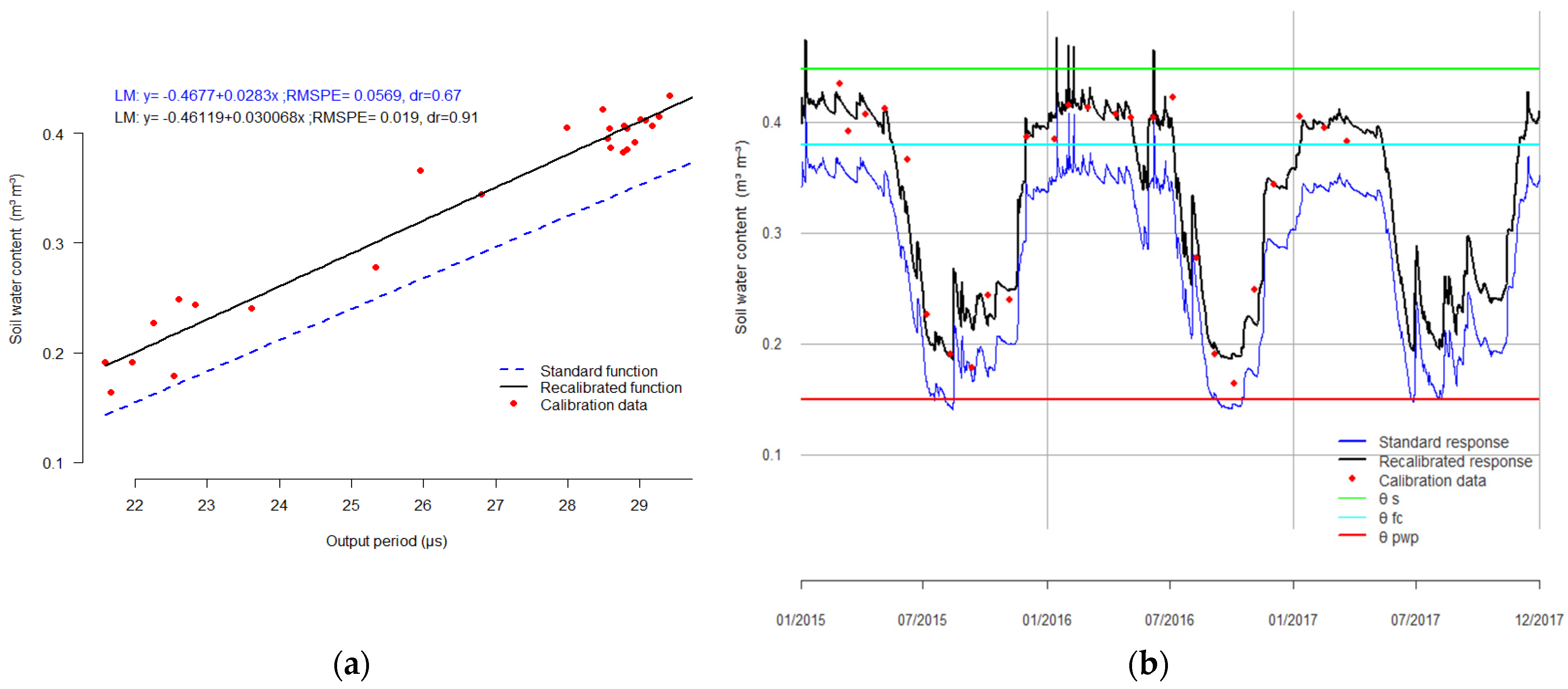
3.1.3. Validation of Standard Functions
Temperature Correction
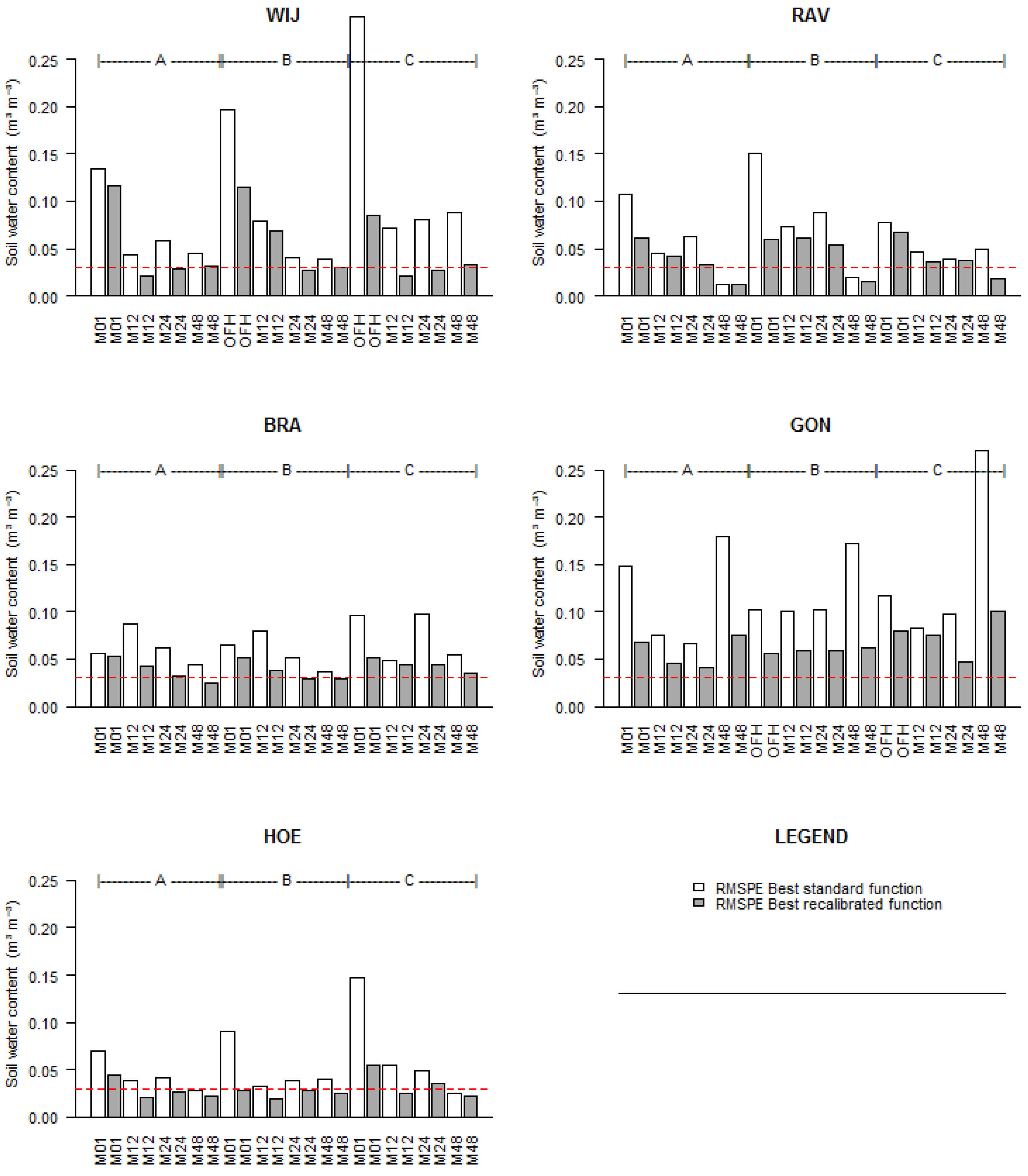
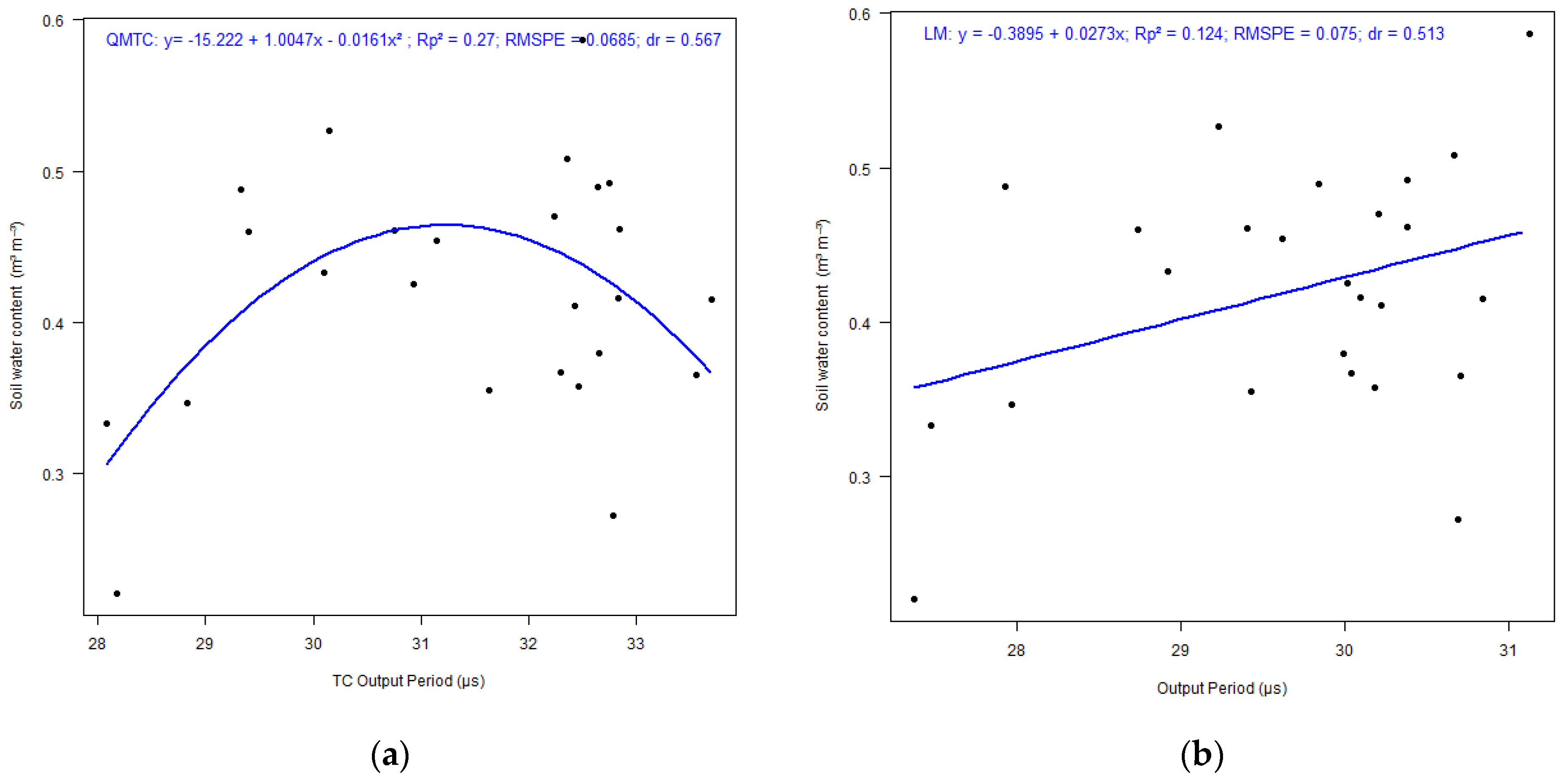
3.1.4. Validation of In Situ Recalibrated Functions
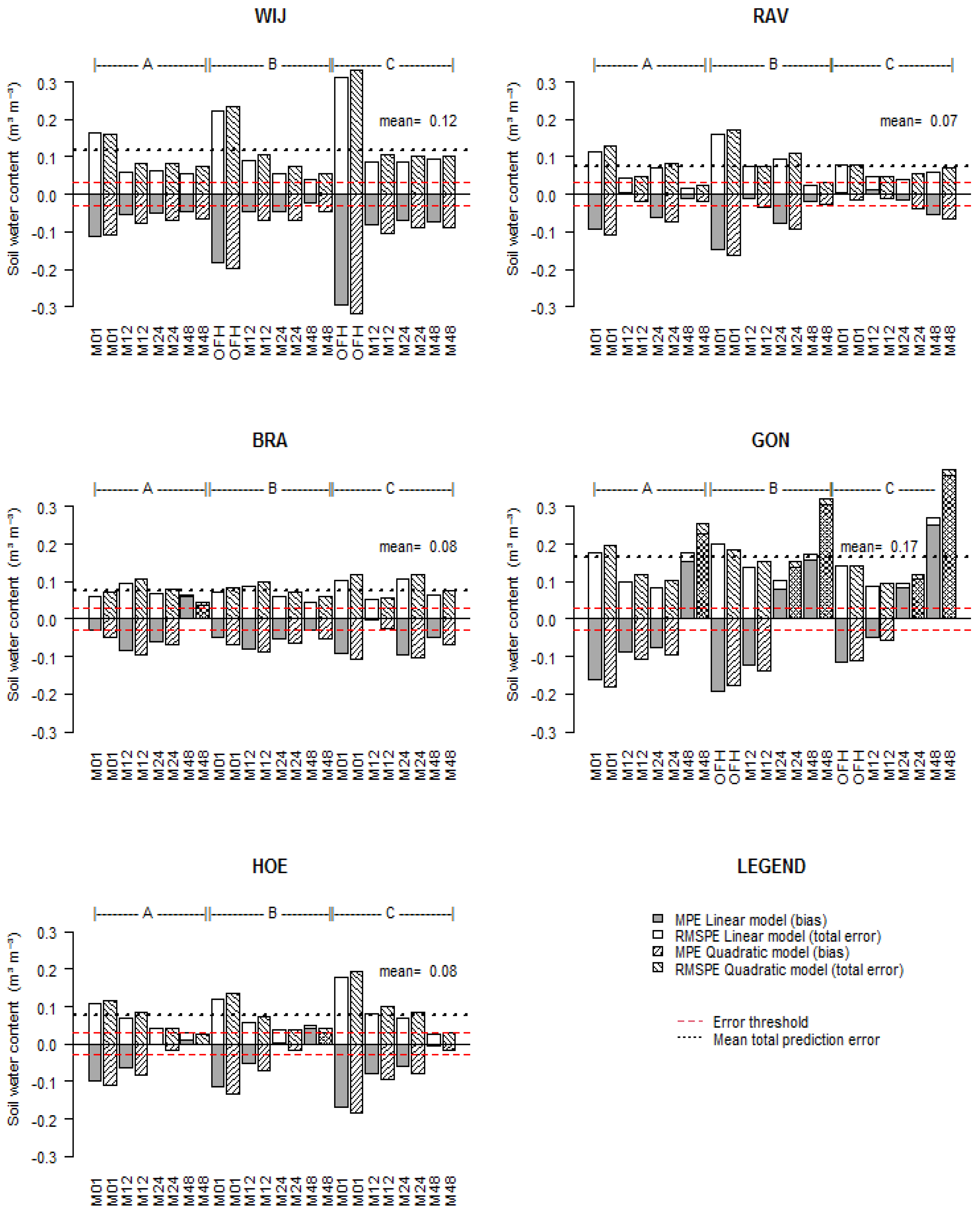
3.2. Explaining the Prediction Errors at the Plot Scale
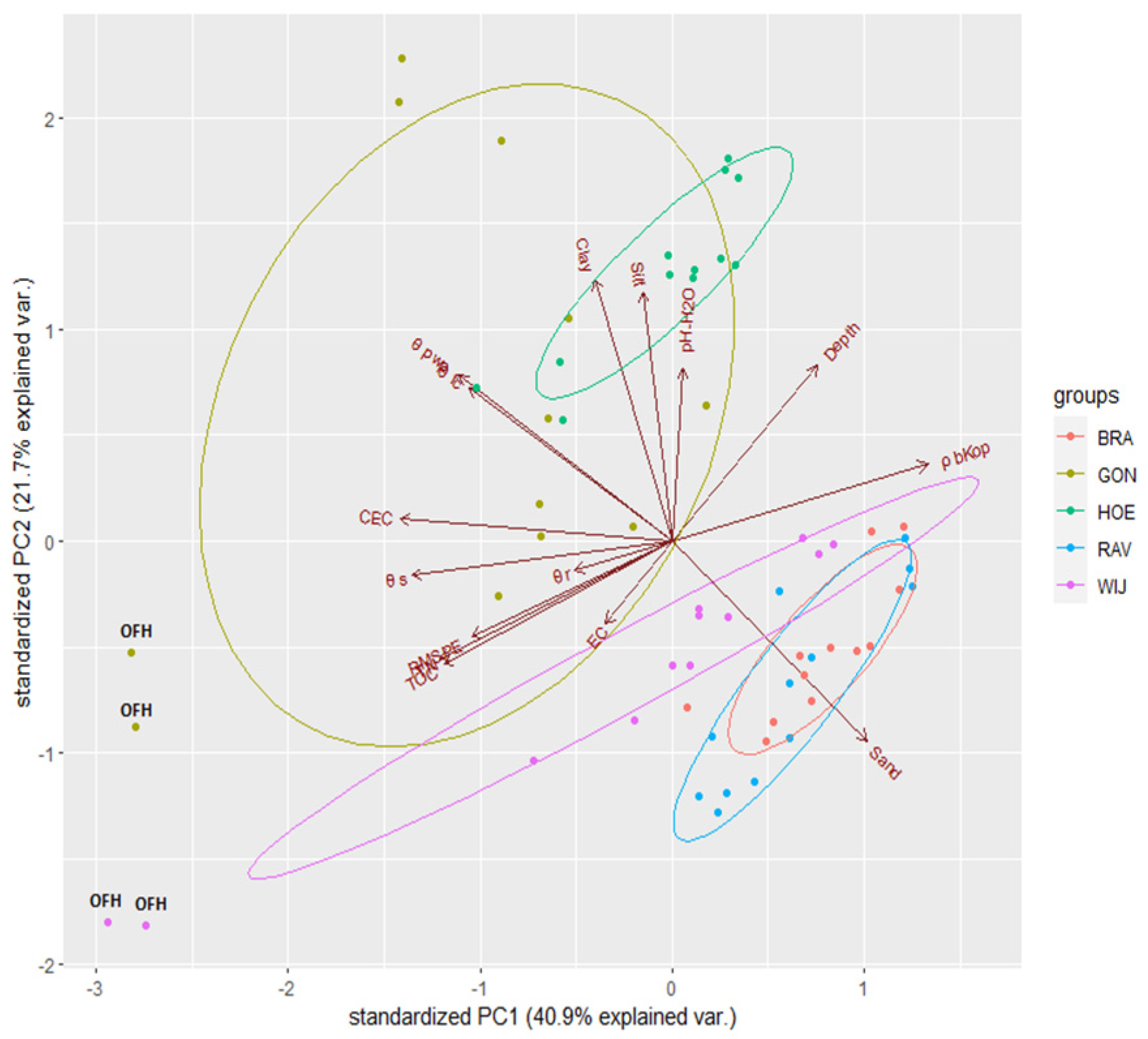
3.2.1. Contributors to Bias
3.2.2. Contributors to Overall Error
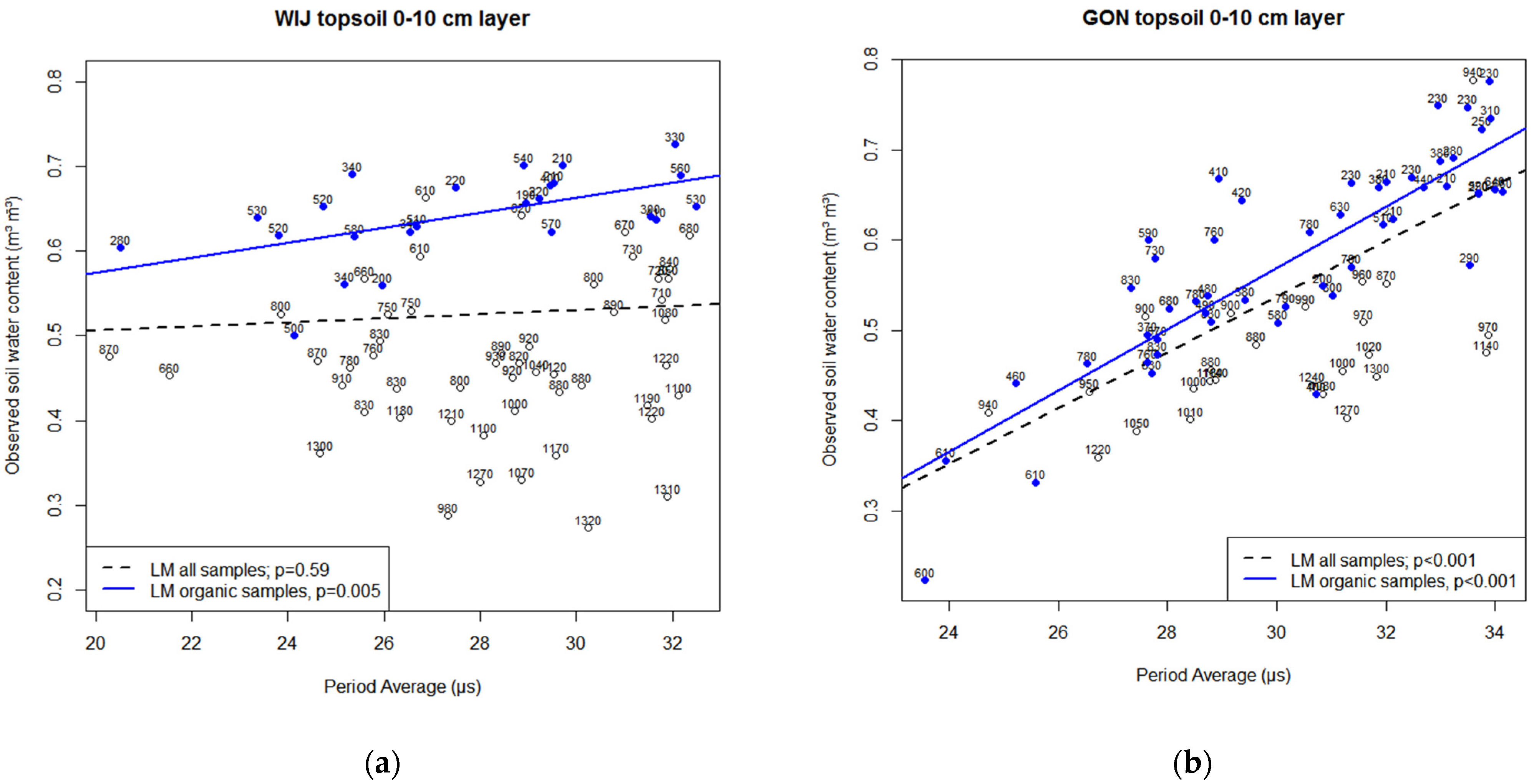
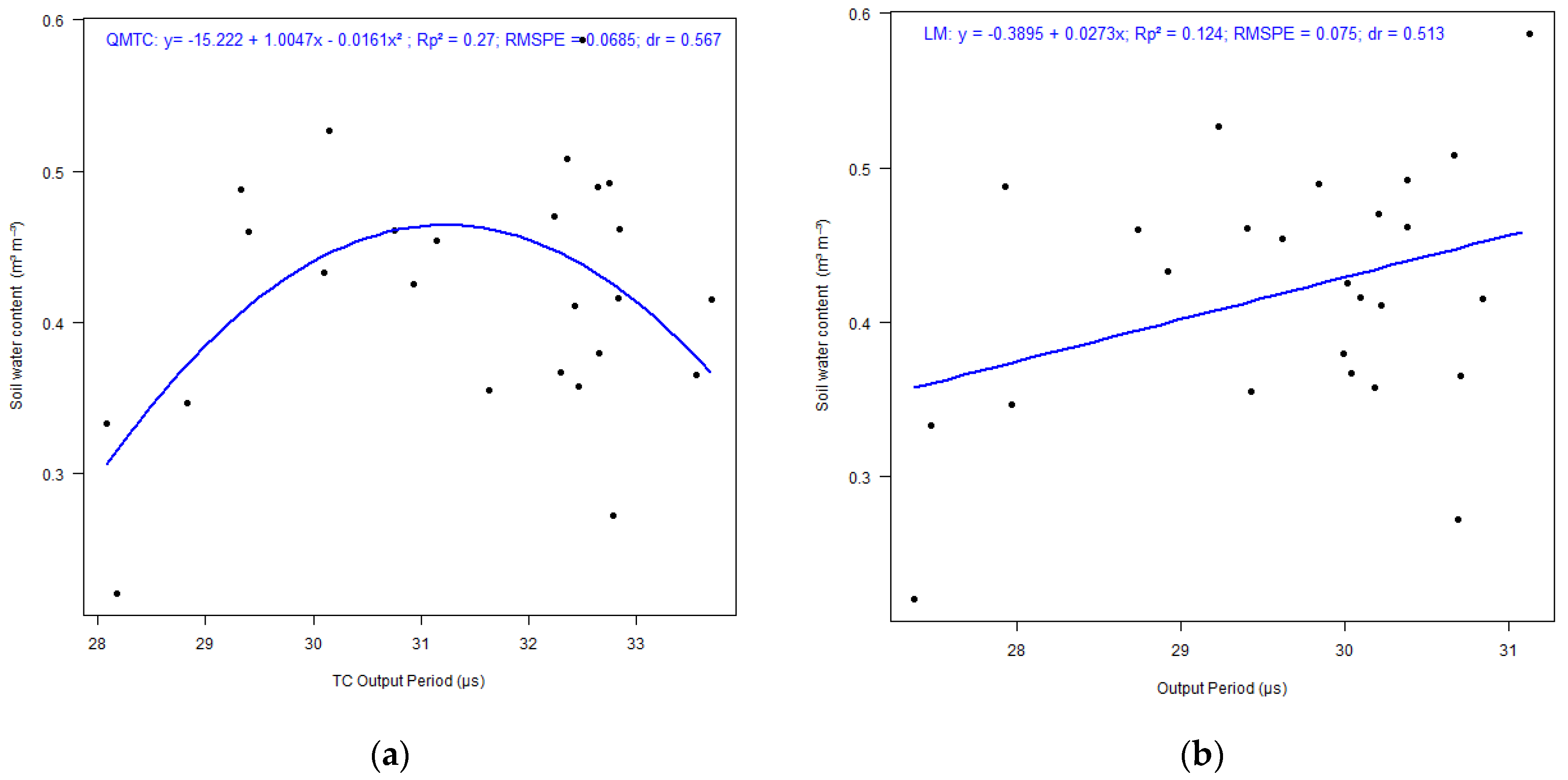
3.3. Improving the Prediction Errors in Organo-Mineral Topsoil Layers
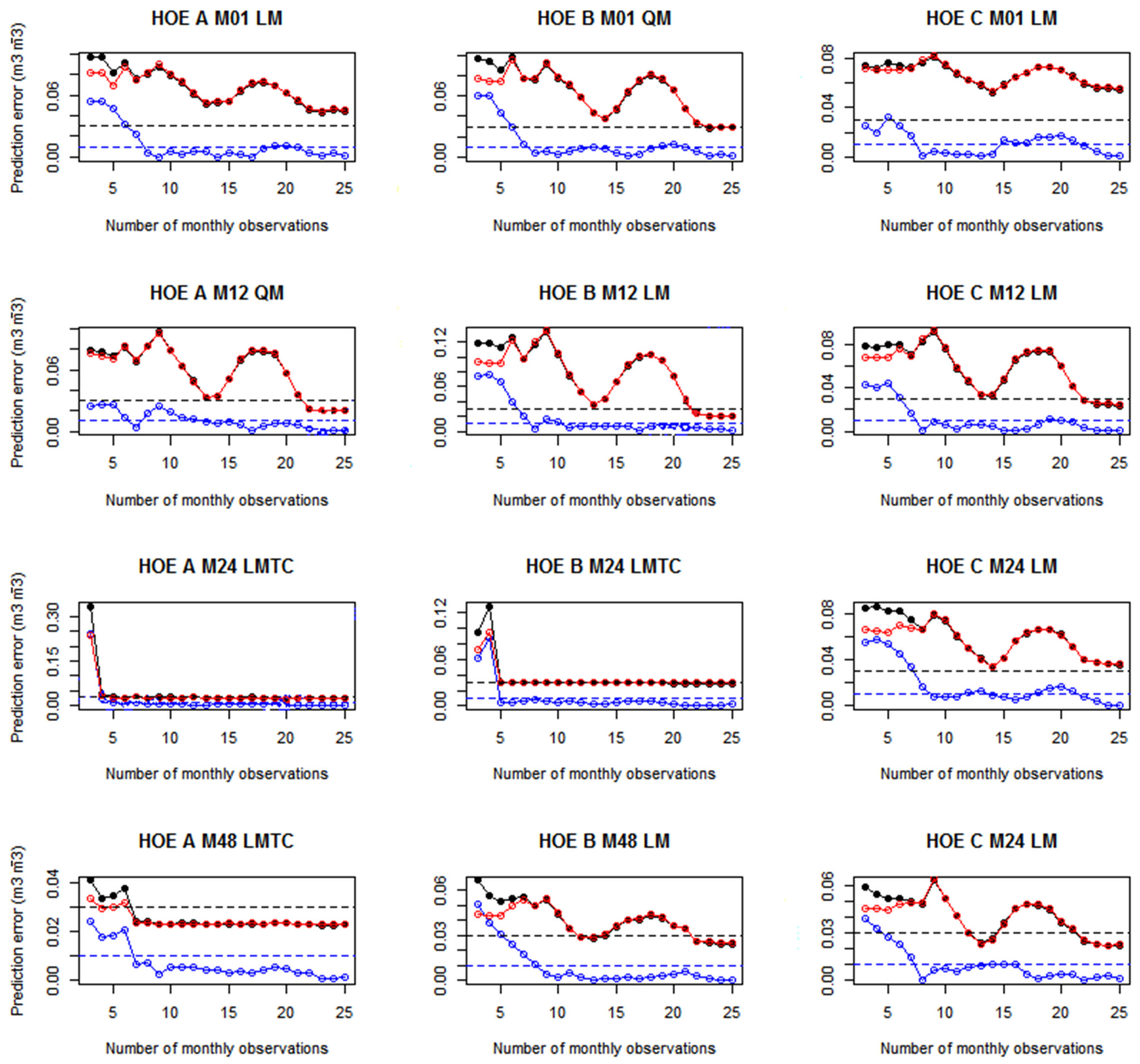
3.4. Requirements for Optimal Calibration
3.5. Final Calibration Functions
4. Discussion
4.1. Attainable Level of Predictive Accuracy
4.2. FDR Response to Soil Properties
4.3. Spatio-Temporal Variation of Soil Water Content
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | WIJ | RAV | BRA | GON | HOE |
|---|---|---|---|---|---|
| ICP Forests LII plot code 1 | 2_11 | 2_14 | 2_15 | 2_16 | 2_21 |
| Location | Wijnendale | Ravels | Brasschaat | Gontrode | Hoeilaart |
| Latitude [DD] | 51.06946 | 51.40306 | 51.30762 | 50.97501 | 50.74722 |
| Longitude [DD] | 3.03612 | 5.05694 | 4.51982 | 3.80433 | 4.41472 |
| Altitude [m asl] | 31 | 35 | 14 | 26 | 129 |
| MAT [°C] | 11 | 10.4 | 10.8 | 10.6 | 10.7 |
| MAP [mm] | 867 | 887 | 882 | 786 | 854 |
| Type | Deciduous broadleaved | Evergreen coniferous | Evergreen coniferous | Deciduous broadleaved | Deciduous broadleaved |
| EFTC 2 | 6.Beech forest | 14.Introduced tree species | 2.Nemoral coniferous forest | 5.Mesophytic deciduous forest | 6.Beech forest |
| Dom. tree species | Fagus sylvatica | Pinus nigra | Pinus sylvestris; Betula pendula | Quercus robur; Fagus sylvatica | Fagus sylvatica |
| Age [yr] | 86 | 91 | 92 | 103 | 112 |
| Top height 3 [m] | 30.57 | 27.96 | 22.36 | 31.01 | 37.18 |
| Basal area 4 [m2] | 30.97 | 42.56 | 28.53 | 36.39 | 33.30 |
| Stem density 5 [n/ha] | 152 | 404 | 576 | 548 | 224 |
| Humus system 6 | Mor | Mor | Mor | Moder | Moder |
| Reference Soil Group 7 | Umbrisol | Arenosol | Arenosol | Planosol | Retisol |
| Soil qualifiers 7 | Endogleyic, Folic, Endoaric, Endoraptic | Hyperdystric, Albic, Endogleyic, Folic, Humic | Hyperdystric, Albic, Brunic, Gleyic, Aric, Raptic | Eutric, Luvic, Folic, Clayic, Siltic, Ochric, Endoraptic | Hyperdystric, Glossic, Fragic, Abruptic, Cutanic, Differentic, Pantosiltic, Profondic |
| Parent Material | Eolian sands | Eolian sands | Eolian sands | Loamy loess on Tertiary clay | Loamy loess |
| WIJ | RAV | BRA | GON | HOE | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Layer | A | B | C | A | B | C | A | B | C | A | B | C | A | B | C |
| OFH | −2 | −4 | −3 | −4 | |||||||||||
| M01 | 2 | 1 | 1 | 2.5 | 3.5 | 0 | 7 | 4 | 5 | 5 | 4 | ||||
| M12 | 12.5 | 11 | 8 | 16 | 13 | 14 | 15 | 16 | 25 | 17 | 7 | 19 | 19 | 20 | 15 |
| M24 | 36 | 31 | 28 | 30 | 31 | 29 | 35 | 36 | 40 | 37 | 20 | 35 | 39 | 45 | 42 |
| M48 | 57 | 61 | 59 | 60 | 61 | 62 | 73 | 66 | 60 | 58 | 55 | 58 | 62 | 66 | 60 |
| Depth | Period Average (PA, µs) | Soil Temperature (ST, °C) 1 | Bulk Density (ρbKop, kg m−3) | Gravimetric SWC (Ɵm, g kg−1) | Volumetric SWC (Ɵv, m3 m−3) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Site | Seq. | Layer | n | Mean | CI95 Mean | Range | Mean | CI95 Mean | Range | Mean | CI95 Mean | Range | Mean | CI95 Mean | Range | Mean | CI95 Mean | Range |
| WIJ | 1 | OFH | 47 | 27.8 | [26.9, 28.7] | 20.5–32.5 | 11.5 | [9.2, 15.2] | 5.5–25.0 | 559 | [498, 616] | 190–840 | 1343 | [1139, 1609] | 493–3476 | 0.59 | [0.57, 0.61] | 0.41–0.73 |
| 1 | M01 | 28 | 28.7 | [27.6, 29.5] | 20.3–32.1 | 12.5 | [10.2, 16.2] | 6.4–24.2 | 1066 | [1010, 1122] | 870–1320 | 404 | [367, 442] | 208–593 | 0.42 | [0.39, 0.44] | 0.27–0.53 | |
| 2 | M12 | 75 | 24.2 | [23.8, 24.6] | 19.7–26.4 | 10.6 | [9.5, 11.8] | 6.2–15.4 | 1335 | [1290, 1358] | 420–1530 | 221 | [200, 301] | 117–1592 | 0.28 | [0.27, 0.30] | 0.14–0.67 | |
| 3 | M24 | 75 | 24.2 | [23.6, 24.9] | 18.4–30.0 | 10.5 | [9.6, 11.6] | 6.7–14.9 | 1317 | [1297, 1335] | 1110–1500 | 208 | [198, 218] | 117–335 | 0.27 | [0.26, 0.29] | 0.15–0.41 | |
| 4 | M48 | 75 | 24.6 | [23.9, 25.3] | 18.4–28.7 | 10.4 | [9.5, 11.4] | 7–14.5 | 1441 | [1418, 1461] | 1130–1620 | 195 | [182, 209] | 76.4–379 | 0.28 | [0.26, 0.29] | 0.11–0.46 | |
| RAV | 1 | OFH | 2 | 21.6 | - | 18.6–24.6 | 15.8 | - | 15.8–15.8 | 765 | - | 690–840 | 470 | - | 260–680 | 0.35 | - | 0.23–0.47 |
| 1 | M01 | 73 | 22.7 | [22.1, 23.4] | 17.8–29.4 | 10.2 | [8.8, 11.6] | 4.6–16.7 | 1434 | [1395, 1467] | 990–1660 | 179 | [165, 196] | 53.2–409 | 0.25 | [0.23, 0.27] | 0.07–0.43 | |
| 2 | M12 | 75 | 23.5 | [23.1, 24.0] | 18.4–26.3 | 10.4 | [9.2, 11.6] | 5.4–15.8 | 1461 | [1434, 1485] | 1150–1660 | 136 | [125, 148] | 43–262 | 0.2 | [0.18, 0.21] | 0.06–0.34 | |
| 3 | M24 | 75 | 21.7 | [21.3, 22.1] | 17.7–24.8 | 10.5 | [9.4, 11.7] | 5.8–15.6 | 1399 | [1376, 1422] | 1190–1670 | 143 | [133, 154] | 48–298 | 0.2 | [0.18, 0.21] | 0.06–0.36 | |
| 4 | M48 | 75 | 19.7 | [19.5, 20.1] | 17.9–26.4 | 10.4 | [9.4, 11.4] | 6.4–14.5 | 1602 | [1582, 1617] | 1310–1760 | 74.3 | [68.4, 82.6] | 27.9–213 | 0.12 | [0.11, 0.13] | 0.05–0.28 | |
| BRA | 1 | M01 | 75 | 21.7 | [21.3, 22.2] | 17.4–26.2 | 10.7 | [9.1, 12.4] | 4.1–17.7 | 1378 | [1337, 1407] | 640–1570 | 154 | [140, 177] | 49.1–603 | 0.2 | [0.19, 0.22] | 0.07–0.39 |
| 2 | M12 | 75 | 21.2 | [20.7, 21.6] | 17.0–25.5 | 10.7 | [9.3, 12.2] | 4.8–16.3 | 1440 | [1416, 1460] | 1140–1590 | 130 | [120, 142] | 38.4–301 | 0.19 | [0.17, 0.20] | 0.05–0.38 | |
| 3 | M24 | 75 | 20.2 | [19.9, 20.4] | 17.2–22.4 | 10.9 | [9.7, 12.2] | 5.7–16.0 | 1494 | [1476, 1513] | 1220–1700 | 115 | [106, 124] | 38.5–228 | 0.17 | [0.16, 0.19] | 0.06–0.33 | |
| 4 | M48 | 75 | 22.9 | [22.5, 23.3] | 18.2–26.6 | 10.7 | [9.6, 11.8] | 6.4–15.3 | 1549 | [1532, 1564] | 1280–1700 | 121 | [112, 129] | 48.8–201 | 0.19 | [0.17, 0.20] | 0.08–0.30 | |
| GON | 1 | OFH | 50 | 30.2 | [29.4, 31.0] | 23.6–34.1 | 10.5 | [8.7, 12.3] | 4.1–16.1 | 509 | [450, 570] | 200–830 | 1495 | [1255, 1787] | 370–3449 | 0.58 | [0.54, 0.61] | 0.22–0.78 |
| 1 | M01 | 25 | 30 | [29.1, 30.9] | 24.7–33.9 | 9.8 | [7.7, 12.1] | 5.7–15.6 | 1031 | [986, 1084] | 870–1300 | 469 | [431, 523] | 295–824 | 0.47 | [0.45, 0.52] | 0.36–0.78 | |
| 2 | M12 | 75 | 28 | [27.5, 28.5] | 22.2–31.1 | 10.3 | [9.1, 11.6] | 4.9–15.7 | 1095 | [1050, 1141] | 550–1440 | 400 | [366, 440] | 158–1036 | 0.41 | [0.39, 0.43] | 0.18–0.59 | |
| 3 | M24 | 75 | 31.1 | [29.8, 32.2] | 20.2–38.3 | 10.2 | [9.0, 11.4] | 5.3–15.2 | 1221 | [1177, 1261] | 530–1580 | 325 | [300, 356] | 115–804 | 0.38 | [0.36, 0.40] | 0.14–0.59 | |
| 4 | M48 | 75 | 38.6 | [37.9, 39.2] | 31.7–41.9 | 10.1 | [9.1, 11.2] | 5.7–14.7 | 1193 | [1149, 1241] | 720–1740 | 394 | [364, 423] | 151–683 | 0.45 | [0.42, 0.47] | 0.22–0.62 | |
| HOE | 1 | OFH | 2 | 29.6 | - | 28.9–30.2 | 4.8 | - | - | 775 | - | 700–850 | 818 | - | 674–962 | 0.62 | - | 0.57–0.68 |
| 1 | M01 | 76 | 27.7 | [27.1, 28.3] | 21.7–31.0 | 9.9 | [8.5, 11.3] | 4.5–15.4 | 1239 | [1209, 1268] | 900–1480 | 364 | [344, 386] | 182–660 | 0.44 | [0.42, 0.46] | 0.25–0.59 | |
| 2 | M12 | 78 | 27.1 | [26.5, 27.6] | 21.6–29.6 | 9.6 | [8.4, 11.0] | 4.6–15.1 | 1430 | [1410, 1451] | 1220–1700 | 255 | [242, 267] | 127–372 | 0.36 | [0.35, 0.38] | 0.16–0.48 | |
| 3 | M24 | 78 | 27.9 | [27.5, 28.2] | 23.4–29.4 | 9.7 | [8.5, 11.0] | 5.0–14.9 | 1539 | [1515, 1560] | 1290–1770 | 222 | [212, 232] | 133–365 | 0.34 | [0.33, 0.35] | 0.18–0.47 | |
| 4 | M48 | 78 | 29.2 | [29.0, 29.3] | 27.0–30.5 | 9.5 | [8.4, 10.6] | 5.2–14.2 | 1571 | [1554, 1587] | 1400–1710 | 218 | [212, 224] | 161–291 | 0.34 | [0.33, 0.35] | 0.23–0.43 | |
| Site | Profile | Layer | Best Model | AICcWt | 2nd Best Model | AICcWt | ER |
|---|---|---|---|---|---|---|---|
| WIJ | A | M01 | LM | 0.506 | LMTC | 0.250 | 2.03 |
| M12 | LMTC | 0.496 | LM | 0.305 | 1.63 | ||
| M24 | LMTC | 0.529 | LM | 0.264 | 2.00 | ||
| M48 | LM | 0.323 | LMTC | 0.242 | 1.33 | ||
| B | OFH | QM | 0.422 | LM | 0.249 | 1.70 | |
| M12 | QMTC | 0.504 | QM | 0.197 | 2.56 | ||
| M24 | LM | 0.392 | LMTC | 0.292 | 1.34 | ||
| M48 | LMTC | 0.440 | LM | 0.365 | 1.21 | ||
| C | OFH | LM | 0.400 | LMTC | 0.384 | 1.04 | |
| M12 | LM | 0.508 | LMTC | 0.282 | 1.80 | ||
| M24 | QMTC | 0.483 | QM | 0.451 | 1.07 | ||
| M48 | LM | 0.428 | LMTC | 0.352 | 1.21 | ||
| RAV | A | M01 | LM | 0.407 | LMTC | 0.391 | 1.04 |
| M12 | LMTC | 0.505 | LM | 0.258 | 1.96 | ||
| M24 | LM | 0.406 | LMTC | 0.399 | 1.02 | ||
| M48 | LMTC | 0.365 | LM | 0.287 | 1.27 | ||
| B | M01 | LM | 0.472 | LMTC | 0.320 | 1.47 | |
| M12 | LM | 0.281 | LMTC | 0.277 | 1.01 | ||
| M24 | LM | 0.392 | LMTC | 0.292 | 1.34 | ||
| M48 | LM | 0.520 | QM | 0.226 | 2.30 | ||
| C | M01 | LMTC | 0.432 | LM | 0.337 | 1.28 | |
| M12 | QM | 0.949 | QMTC | 0.042 | 22.8 | ||
| M24 | LM | 0.431 | LMTC | 0.217 | 1.98 | ||
| M48 | QM | 0.645 | QMTC | 0.314 | 2.05 | ||
| BRA | A | M01 | LM | 0.463 | LMTC | 0.329 | 1.41 |
| M12 | LM | 0.420 | LMTC | 0.370 | 1.14 | ||
| M24 | QM | 0.308 | LMTC | 0.251 | 1.23 | ||
| M48 | QM | 0.498 | LM | 0.240 | 2.07 | ||
| B | M01 | LM | 0.449 | LMTC | 0.259 | 1.73 | |
| M12 | LM | 0.419 | LMTC | 0.319 | 1.31 | ||
| M24 | LM | 0.427 | LMTC | 0.329 | 1.30 | ||
| M48 | LMTC | 0.413 | LM | 0.244 | 1.69 | ||
| C | M01 | LM | 0.412 | LMTC | 0.296 | 1.39 | |
| M12 | QMTC | 0.630 | LMTC | 0.169 | 3.73 | ||
| M24 | LMTC | 0.549 | LM | 0.255 | 2.16 | ||
| M48 | LM | 0.390 | LMTC | 0.341 | 1.14 | ||
| GON | A | M01 | LM | 0.712 | QM | 0.179 | 3.97 |
| M12 | QM | 0.314 | LM | 0.289 | 1.09 | ||
| M24 | LMTC | 0.427 | LM | 0.350 | 1.22 | ||
| M48 | LMTC | 0.498 | LM | 0.250 | 1.99 | ||
| B | OFH | LM | 0.667 | QM | 0.169 | 3.95 | |
| M12 | QMTC | 0.821 | LMTC | 0.092 | 8.90 | ||
| M24 | LMTC | 0.472 | LM | 0.305 | 1.55 | ||
| M48 | LM | 0.343 | LMTC | 0.336 | 1.02 | ||
| C | OFH | LM | 0.574 | LMTC | 0.217 | 2.65 | |
| M12 | QMTC | 0.558 | LM | 0.240 | 2.32 | ||
| M24 | LM | 0.657 | QM | 0.268 | 2.45 | ||
| M48 | QMTC | 0.488 | LM | 0.226 | 2.16 | ||
| HOE | A | M01 | LM | 0.552 | LMTC | 0.215 | 2.57 |
| M12 | QM | 0.468 | LM | 0.308 | 1.52 | ||
| M24 | LMTC | 0.690 | QMTC | 0.181 | 3.81 | ||
| M48 | LMTC | 0.395 | LM | 0.368 | 1.07 | ||
| B | M01 | QM | 0.374 | LM | 0.306 | 1.23 | |
| M12 | LM | 0.532 | QM | 0.296 | 1.80 | ||
| M24 | LMTC | 0.612 | QMTC | 0.228 | 2.68 | ||
| M48 | LM | 0.389 | LMTC | 0.264 | 1.47 | ||
| C | M01 | LM | 0.462 | LMTC | 0.287 | 1.61 | |
| M12 | LM | 0.530 | QM | 0.304 | 1.74 | ||
| M24 | LM | 0.630 | QM | 0.170 | 3.70 | ||
| M48 | LM | 0.720 | QM | 0.176 | 4.08 |
| Coefficients | Prediction Quality | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Site | Profile | Layer | Model | C0 | C1 | C2 | R2adj | RMSPE | dr |
| WIJ | A | M01 | LM | −0.606312 | 0.036363 | - | 0.102 | 0.1165 | 0.547 |
| M12 | LMTC | −0.242666 | 0.020704 | - | 0.787 | 0.0213 | 0.794 | ||
| M24 | LMTC | −0.136595 | 0.016481 | - | 0.822 | 0.0282 | 0.792 | ||
| M48 | LM | −0.361767 | 0.025925 | - | 0.859 | 0.0317 | 0.833 | ||
| B | OFH | LM | 0.39962 | 0.008767 | - | 0.276 | 0.0417 | 0.562 | |
| M12 | LMTC | −0.44317 | 0.028264 | - | 0.304 | 0.0763 | 0.596 | ||
| M24 | LM | −0.33985 | 0.024922 | - | 0.753 | 0.0278 | 0.751 | ||
| M48 | LMTC | −0.26083 | 0.020252 | - | 0.792 | 0.0307 | 0.78 | ||
| C | OFH | LM | 0.39962 | 0.008767 | - | 0.276 | 0.0417 | 0.562 | |
| M12 | LM | −0.2188 | 0.021074 | - | 0.674 | 0.0217 | 0.715 | ||
| M24 | QMTC | −0.9755 | 0.091207 | −0.0016 | 0.731 | 0.0278 | 0.748 | ||
| M48 | LM | −0.10914 | 0.016292 | - | 0.793 | 0.0329 | 0.787 | ||
| RAV | A | M01 | LM | 0.128851 | 0.004916 | - | 0.012 | 0.062 | 0.504 |
| M12 | LMTC | −0.30848 | 0.02074 | - | 0.47 | 0.0418 | 0.659 | ||
| M24 | LM | −0.31094 | 0.023671 | - | 0.527 | 0.0337 | 0.654 | ||
| M48 | LMTC | −0.40985 | 0.025594 | - | 0.718 | 0.0115 | 0.737 | ||
| B | M01 | LM | −0.22922 | 0.023997 | - | 0.418 | 0.0596 | 0.592 | |
| M12 | LM | −0.03778 | 0.010414 | - | 0.126 | 0.0606 | 0.519 | ||
| M24 | LM | −0.13118 | 0.016274 | - | 0.18 | 0.0533 | 0.582 | ||
| M48 | LM | −0.46501 | 0.029232 | - | 0.693 | 0.015 | 0.749 | ||
| C | M01 | LMTC | −0.08591 | 0.012619 | - | 0.271 | 0.0673 | 0.567 | |
| M12 | LM | −0.54236 | 0.030826 | - | 0.606 | 0.0462 | 0.686 | ||
| M24 | LM | −0.46445 | 0.028796 | - | 0.613 | 0.0379 | 0.723 | ||
| M48 | QM | −1.811908 | 0.159353 | −0.003051 | 0.827 | 0.0188 | 0.786 | ||
| BRA | A | M01 | LM | −0.46195 | 0.029329 | - | 0.572 | 0.0531 | 0.71 |
| M12 | LM | −0.4655 | 0.032457 | - | 0.569 | 0.0419 | 0.674 | ||
| M24 | QM | 3.513639 | −0.39108 | 0.01113 | 0.63 | 0.032 | 0.697 | ||
| M48 | QM | 2.004305 | −0.18441 | 0.00445 | 0.742 | 0.024 | 0.749 | ||
| B | M01 | LM | −0.37521 | 0.026302 | - | 0.45 | 0.0519 | 0.638 | |
| M12 | LM | −0.46384 | 0.032053 | - | 0.577 | 0.0382 | 0.688 | ||
| M24 | LM | −0.45503 | 0.030181 | - | 0.634 | 0.0291 | 0.707 | ||
| M48 | LMTC | −0.2654 | 0.020287 | - | 0.621 | 0.0297 | 0.665 | ||
| C | M01 | LM | −0.40277 | 0.029549 | - | 0.468 | 0.0511 | 0.664 | |
| M12 | QMTC | 2.685401 | −0.24947 | 0.00605 | 0.591 | 0.0438 | 0.659 | ||
| M24 | LMTC | −0.67844 | 0.042803 | - | 0.564 | 0.0446 | 0.649 | ||
| M48 | LM | −0.27922 | 0.021949 | - | 0.528 | 0.0357 | 0.627 | ||
| GON | A | M01 | LM | −0.70751 | 0.043 | - | 0.516 | 0.0677 | 0.618 |
| M12 | QM | 3.422366 | −0.27949 | 0.006171 | 0.697 | 0.0461 | 0.723 | ||
| M24 | LMTC | −0.28558 | 0.02309 | - | 0.803 | 0.0409 | 0.814 | ||
| M48 | LMTC | 0.064455 | 0.008269 | - | 0.239 | 0.0755 | 0.545 | ||
| B | OFH | LM | −0.450262 | 0.033966 | - | 0.716 | 0.0591 | 0.749 | |
| M12 | LMTC | −0.309709 | 0.02574 | - | 0.509 | 0.0588 | 0.625 | ||
| M24 | LMTC | −0.42131 | 0.022229 | - | 0.456 | 0.0589 | 0.616 | ||
| M48 | LM | 0.167012 | 0.008683 | - | 0.057 | 0.0618 | 0.513 | ||
| C | OFH | LM | −0.450262 | 0.033966 | - | 0.716 | 0.0591 | 0.749 | |
| M12 | LM | −0.389548 | 0.027291 | - | 0.124 | 0.075 | 0.513 | ||
| M24 | LM | −0.68547 | 0.032331 | - | 0.266 | 0.0468 | 0.558 | ||
| M48 | LM | 0.22404 | 0.004552 | - | 0.003 | 0.0998 | 0.495 | ||
| HOE | A | M01 | LM | −0.32741 | 0.026886 | - | 0.576 | 0.0442 | 0.685 |
| M12 | QM | −2.7324 | 0.202518 | −0.00324 | 0.916 | 0.0201 | 0.872 | ||
| M24 | LMTC | −0.95799 | 0.043073 | - | 0.73 | 0.0269 | 0.77 | ||
| M48 | LMTC | −0.64529 | 0.032059 | - | 0.705 | 0.0227 | 0.74 | ||
| B | M01 | QM | −1.56127 | 0.128421 | −0.00204 | 0.835 | 0.0287 | 0.793 | |
| M12 | LM | −0.46119 | 0.030068 | - | 0.955 | 0.019 | 0.91 | ||
| M24 | LMTC | −0.63709 | 0.032494 | - | 0.797 | 0.0288 | 0.779 | ||
| M48 | LM | −0.88683 | 0.0411 | - | 0.66 | 0.0244 | 0.718 | ||
| C | M01 | LM | 0.022978 | 0.016508 | - | 0.374 | 0.0547 | 0.602 | |
| M12 | LM | −0.29728 | 0.024898 | - | 0.865 | 0.0245 | 0.823 | ||
| M24 | LM | −0.35907 | 0.026401 | - | 0.67 | 0.0361 | 0.686 | ||
| M48 | LM | −0.83325 | 0.04117 | - | 0.749 | 0.0218 | 0.74 | ||
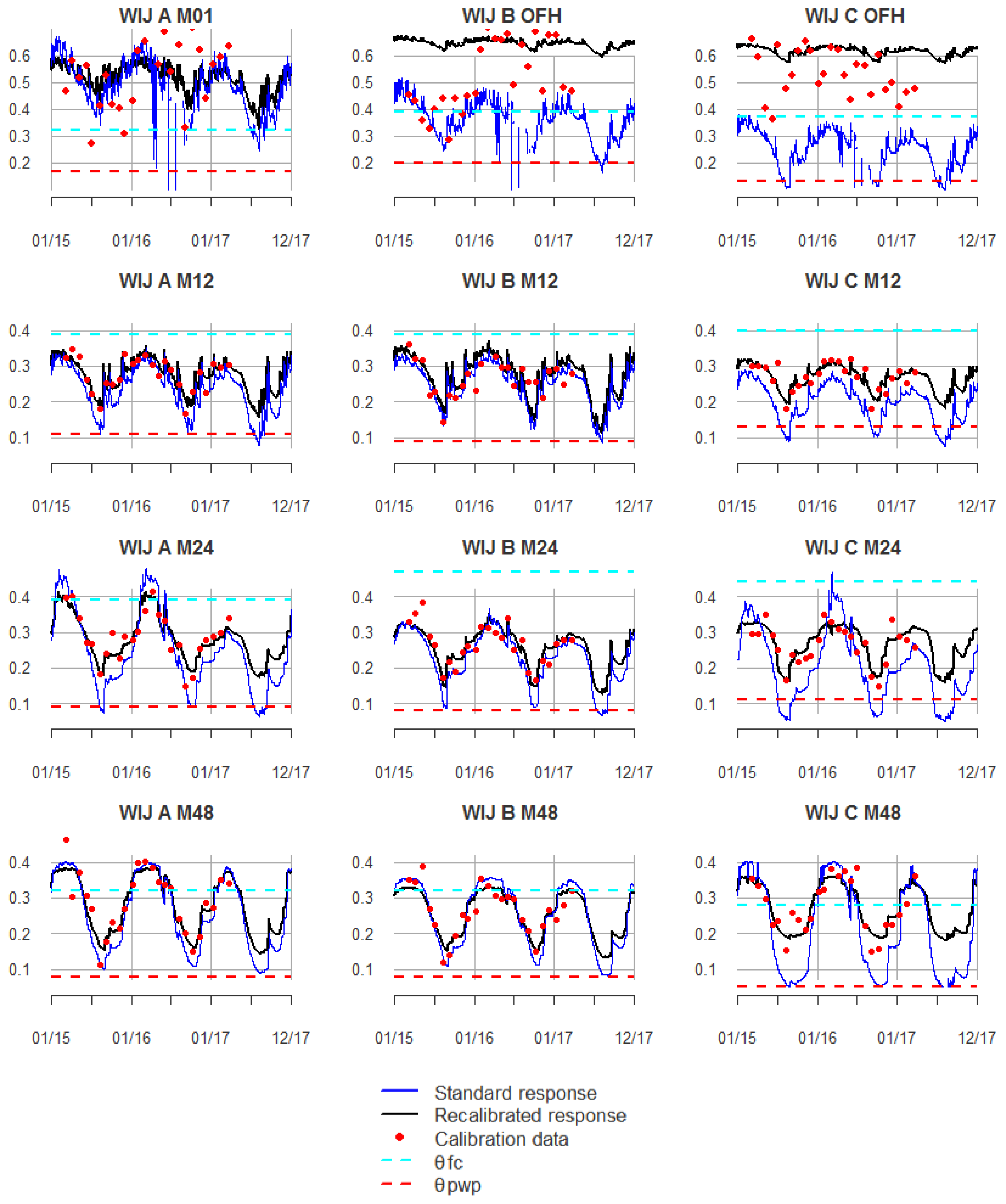
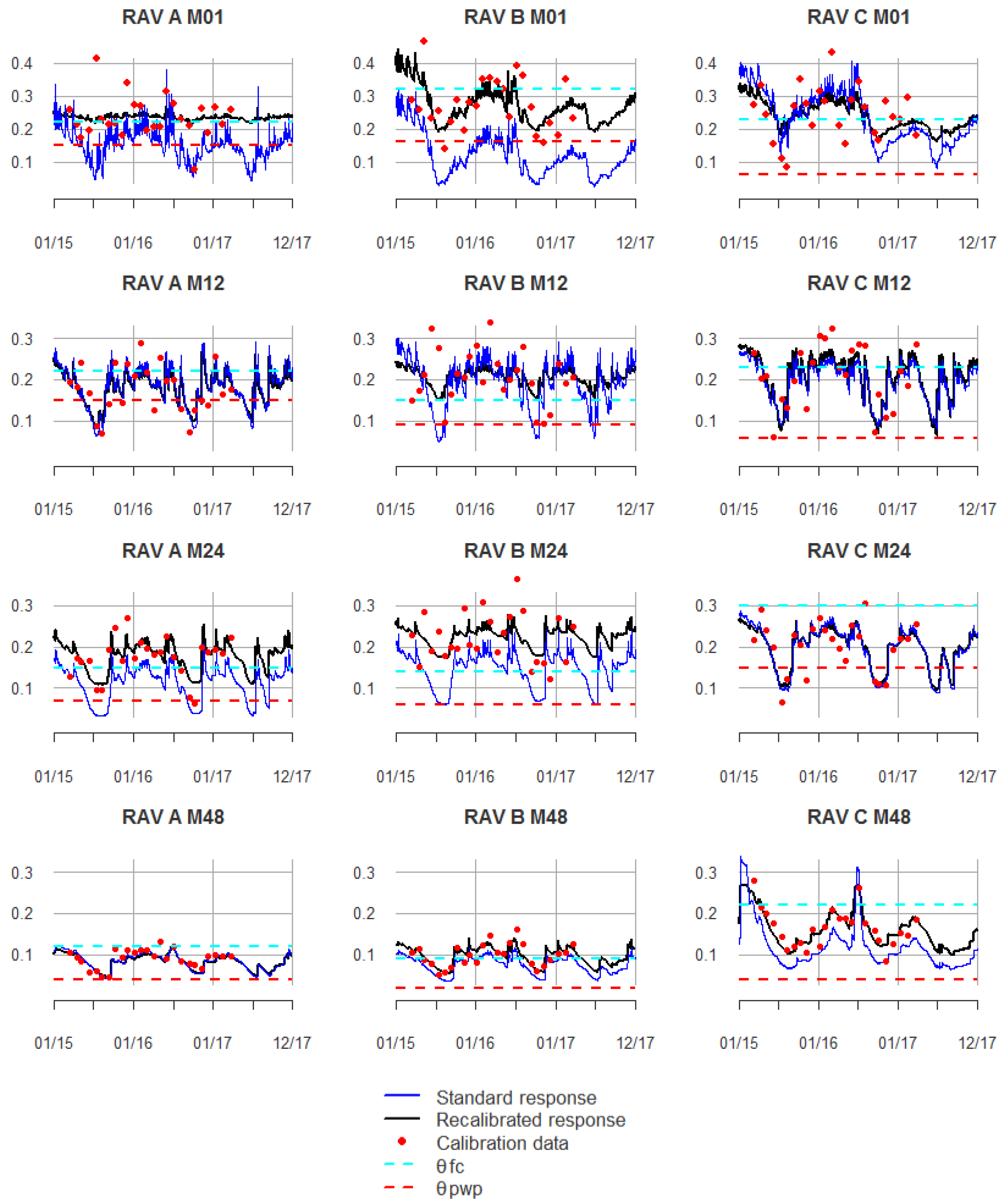
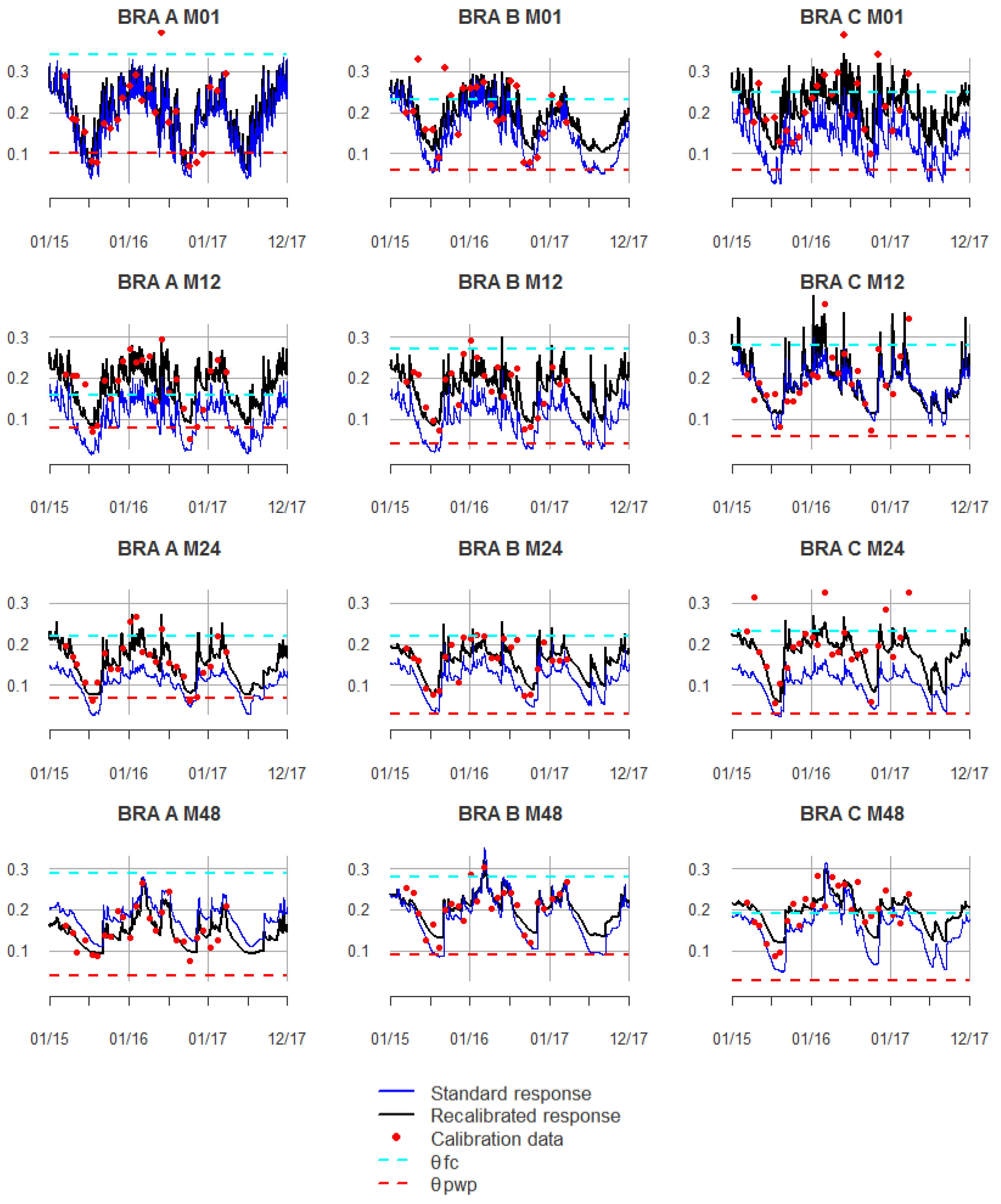
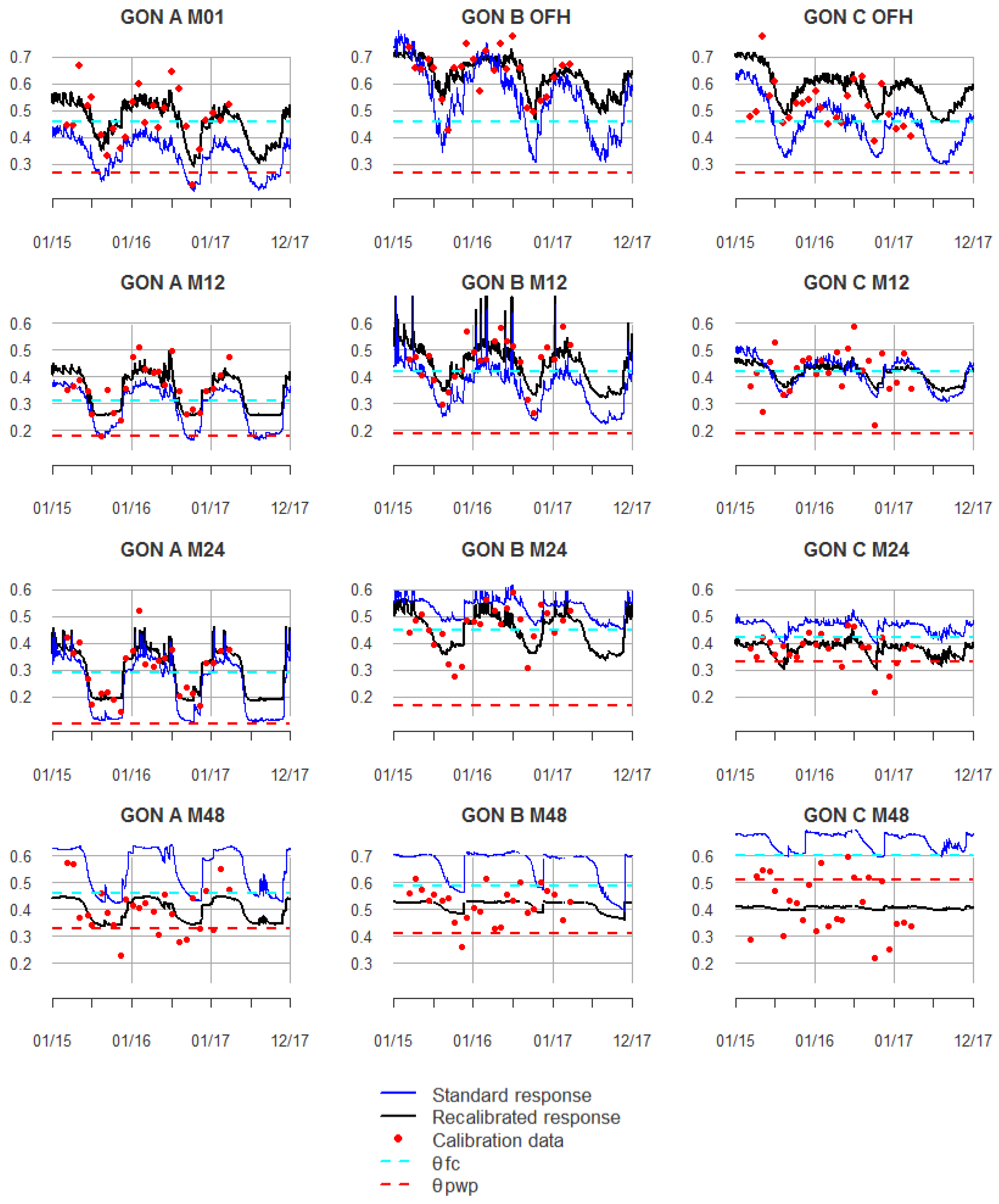
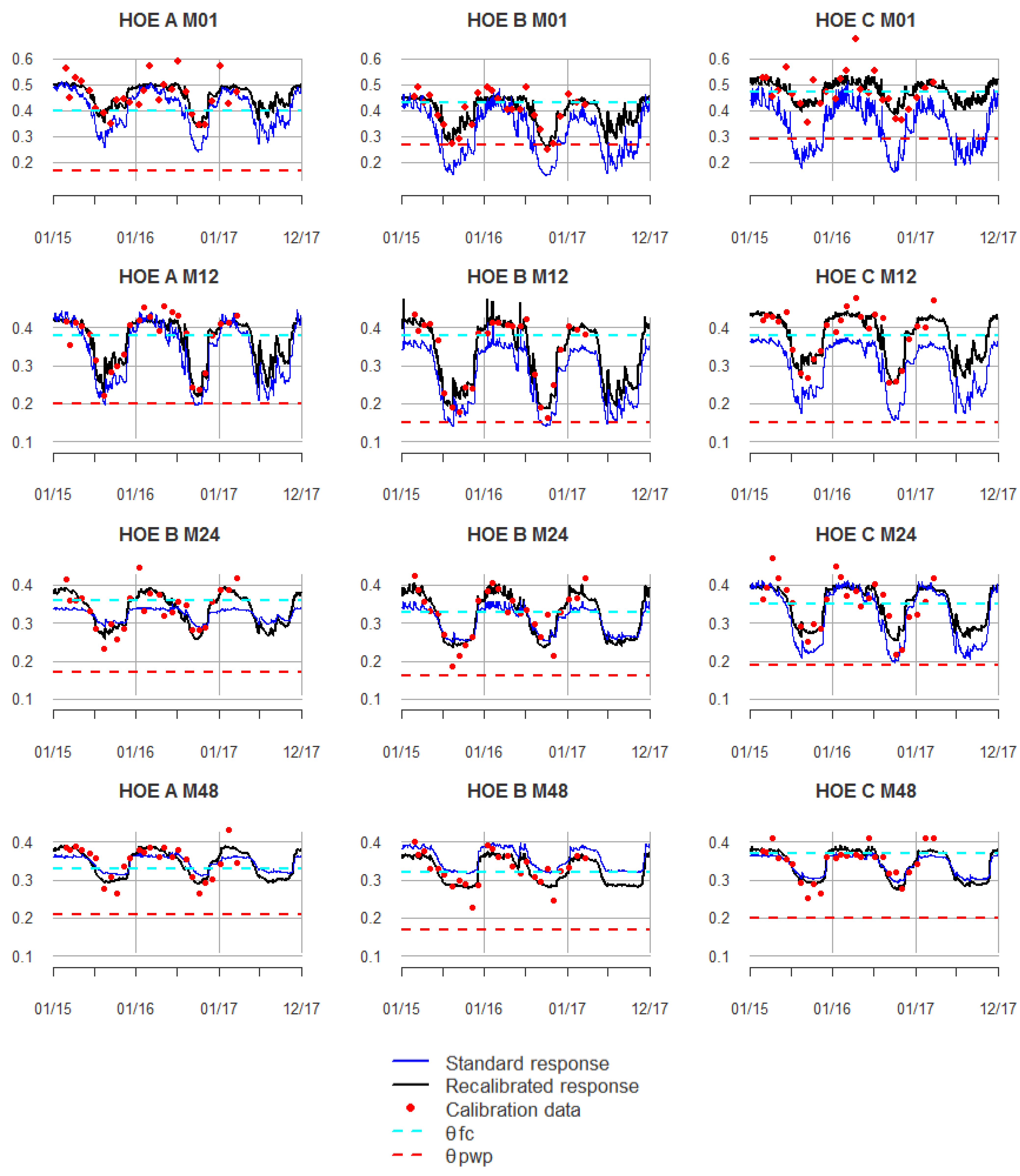
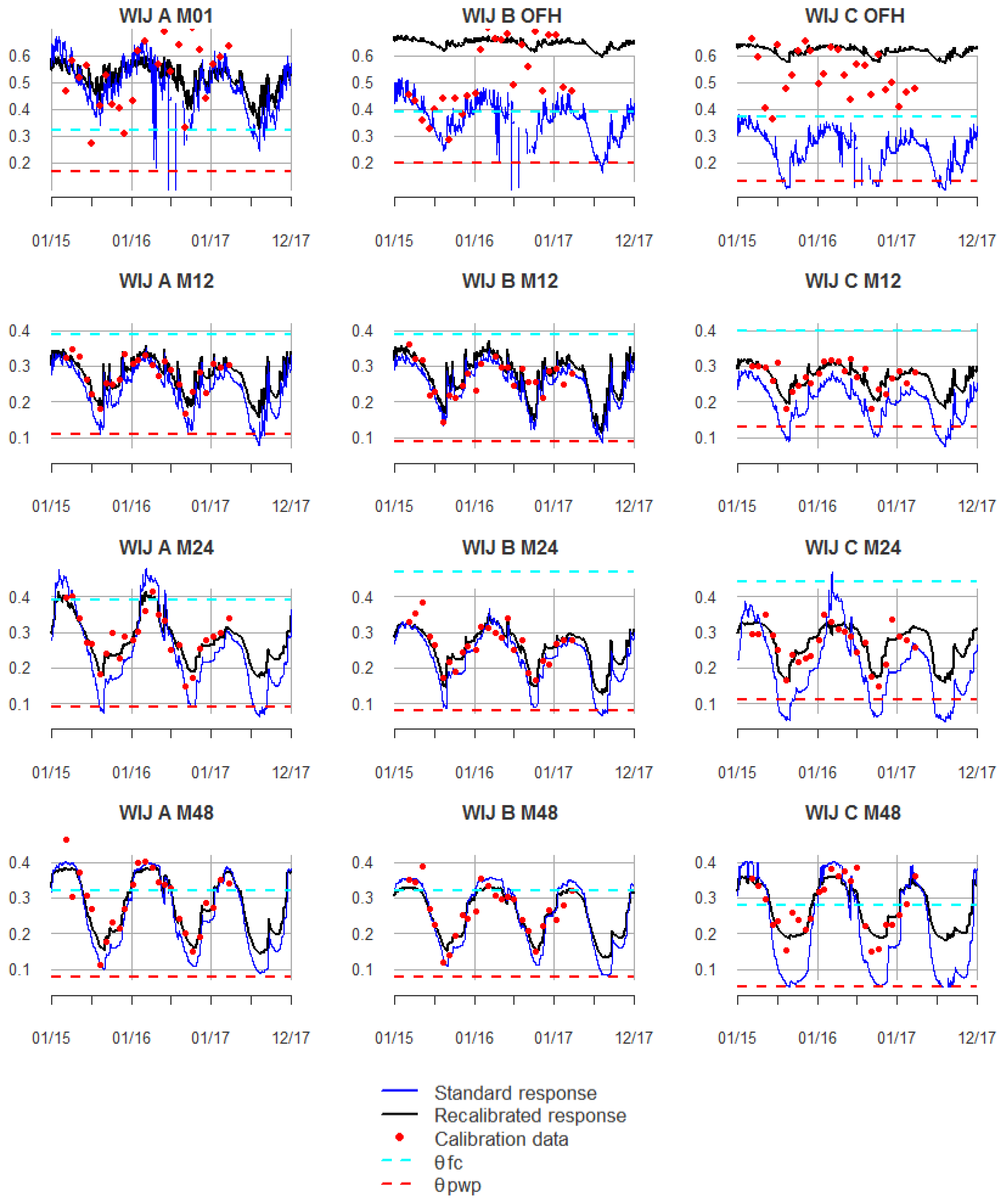
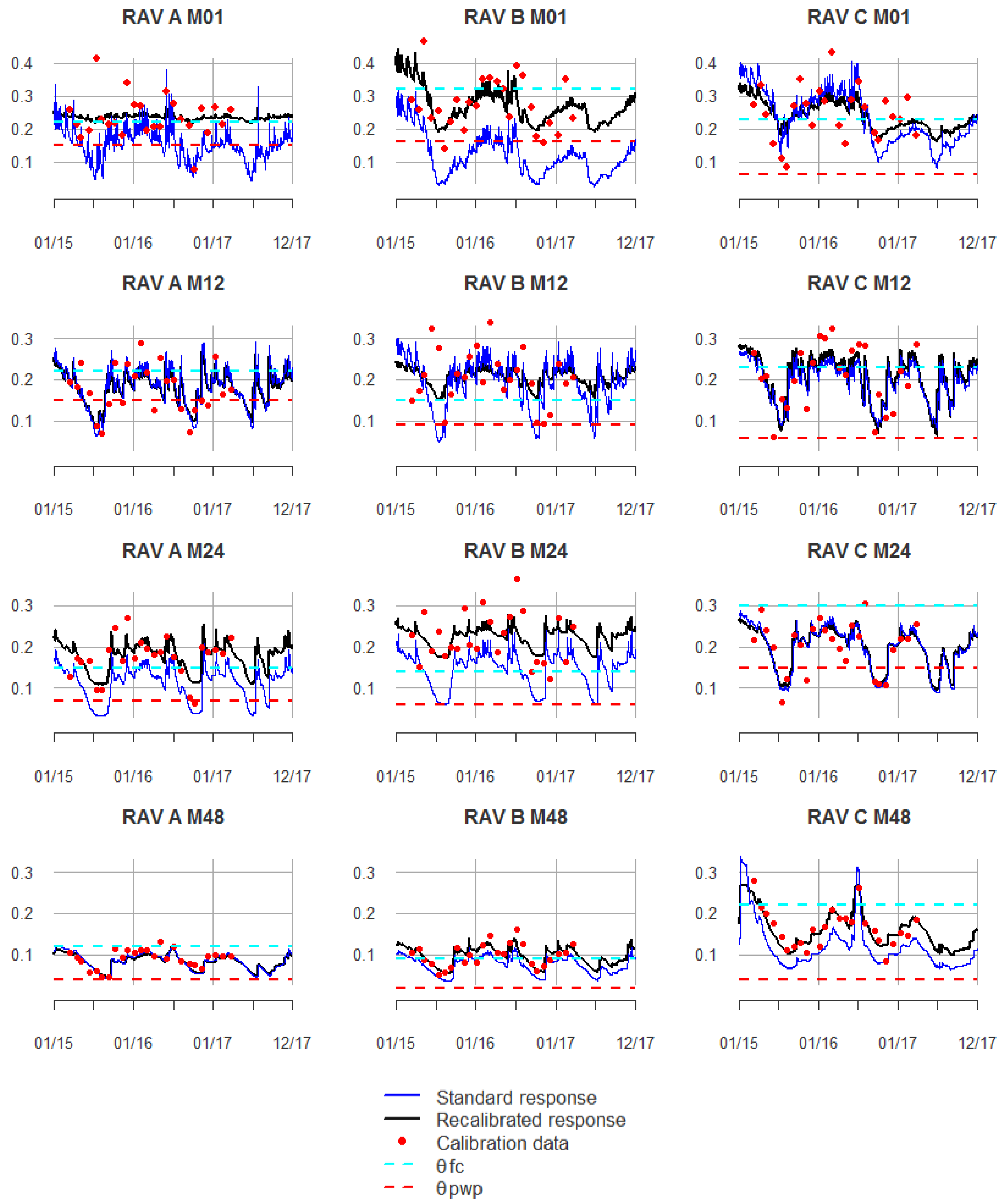
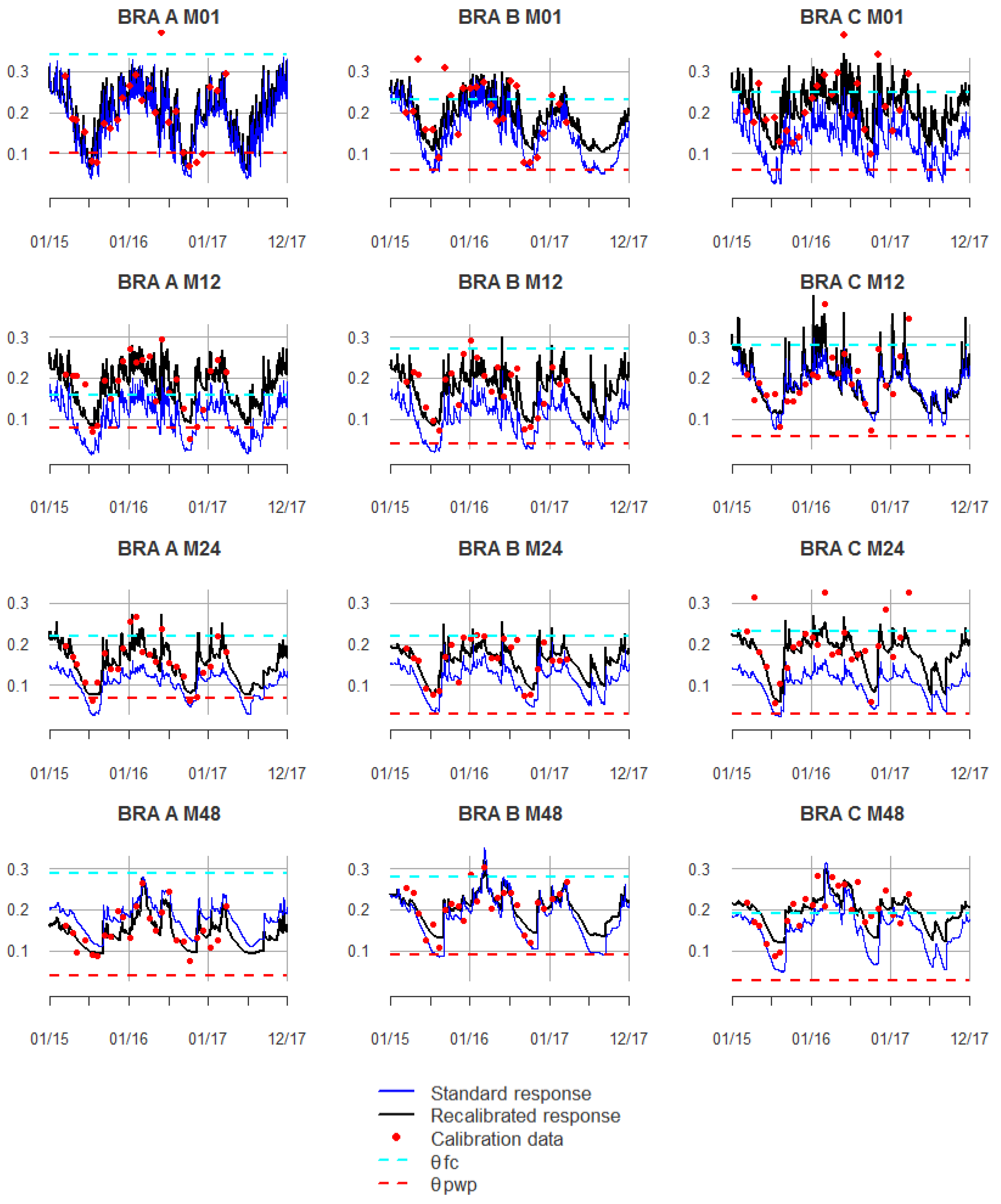
Appendix B. Standard and Recalibrated Soil Water Series


References
- Dong, Y.; Miller, S.; Kelley, L. Performance Evaluation of Soil Moisture Sensors in Coarse-and Fine-Textured Michigan Agricultural Soils. Agriculture 2020, 10, 598. [Google Scholar] [CrossRef]
- Kelleners, T.; Seyfried, M.; Blonquist, J., Jr.; Bilskie, J.; Chandler, D. Improved interpretation of water content reflectometer measurements in soils. Soil Sci. Soc. Am. J. 2005, 69, 1684–1690. [Google Scholar] [CrossRef]
- Logsdon, S. CS616 calibration: Field versus laboratory. Soil Sci. Soc. Am. J. 2009, 73, 1–6. [Google Scholar] [CrossRef]
- Varble, J.L.; Chávez, J. Performance evaluation and calibration of soil water content and potential sensors for agricultural soils in eastern Colorado. Agric. Water Manag. 2011, 101, 93–106. [Google Scholar] [CrossRef]
- Mittelbach, H.; Lehner, I.; Seneviratne, S.I. Comparison of four soil moisture sensor types under field conditions in Switzerland. J. Hydrol. 2012, 430, 39–49. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Schilling, B.; Weuthen, A.; Vereecken, H. Effective calibration of low-cost soil water content sensors. Sensors 2017, 17, 208. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Veldkamp, E.; O’Brien, J.J. Calibration of a frequency domain reflectometry sensor for humid tropical soils of volcanic origin. Soil Sci. Soc. Am. J. 2000, 64, 1549–1553. [Google Scholar] [CrossRef]
- Blonquist, J., Jr.; Jones, S.B.; Robinson, D.A. Standardizing characterization of electromagnetic water content sensors: Part 2. Evaluation of seven sensing systems. Vadose Zone J. 2005, 4, 1059–1069. [Google Scholar] [CrossRef]
- Czarnomski, N.M.; Moore, G.W.; Pypker, T.G.; Licata, J.; Bond, B.J. Precision and accuracy of three alternative instruments for measuring soil water content in two forest soils of the Pacific Northwest. Can. J. For. Res. 2005, 35, 1867–1876. [Google Scholar] [CrossRef] [Green Version]
- Vaz, C.M.; Jones, S.; Meding, M.; Tuller, M. Evaluation of standard calibration functions for eight electromagnetic soil moisture sensors. Vadose Zone J. 2013, 12, 1–16. [Google Scholar] [CrossRef]
- Hignett, C.; Evett, S.R.; Heng, L.K.; Moutonnet, P.; Nguyen, M.L. Field Estimation of Soil Water Content: A Practical Guide to Methods, Instrumentation, and Sensor Technology; IAEA: Vienna, Austria, 2008. [Google Scholar]
- De Vos, B. Capability of PlantCare Mini-Logger Technology for Monitoring of Soil Water Content and Temperature in Forest Soils; INBO: Geraardsbergen, Belgium, 2015; p. 82. [Google Scholar]
- Ruelle, P.; Laurent, J.P. CS616 (CS615) Water Content Reflectometer. In Field Estimation of Soil Water Content. A Practical Guide to Methods Instrumentation and Sensor Technology; Hignett, C., Evett, S., Eds.; International Atomic Energy Agency: Vienna, Austria, 2008; pp. 101–110. [Google Scholar]
- Rüdiger, C.; Western, A.W.; Walker, J.P.; Smith, A.B.; Kalma, J.D.; Willgoose, G.R. Towards a general equation for frequency domain reflectometers. J. Hydrol. 2010, 383, 319–329. [Google Scholar] [CrossRef]
- Udawatta, R.P.; Anderson, S.H.; Motavalli, P.P.; Garrett, H.E. Calibration of a water content reflectometer and soil water dynamics for an agroforestry practice. Agrofor. Syst. 2011, 82, 61–75. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef] [Green Version]
- Jackisch, C.; Germer, K.; Graeff, T.; Andrä, I.; Schulz, K.; Schiedung, M.; Haller-Jans, J.; Schneider, J.; Jaquemotte, J.; Helmer, P. Soil moisture and matric potential–an open field comparison of sensor systems. Earth Syst. Sci. Data 2020, 12, 683–697. [Google Scholar] [CrossRef] [Green Version]
- Ziche, D.; Riek, W.; Russ, A.; Hentschel, R.; Martin, J. Water Budgets of Managed Forests in Northeast Germany under Climate Change—Results from a Model Study on Forest Monitoring Sites. Appl. Sci. 2021, 11, 2403. [Google Scholar] [CrossRef]
- Raspe, S.; Fleck, S.; Beuker, E.; Preuhsler, T.; Bastrup-Birk, A. Meteorological Measurements. In Manual on Methods and Criteria for Harmonized Sampling, Assessment, Monitoring and Analysis of the Effects of Air Pollution on Forests; UNECE ICP Forests, Programme Coordinating Centre, Ed.; Thünen Institute of Forest Ecosystems: Eberswalde, Germany, 2008; 18p, Available online: http://www.icp-forests.org/manual.htm (accessed on 10 August 2021).
- Campbell Scientific. CS616 and CS625 Water Content Reflectometers, Instruction Manual 2020. Revision: 05/20. Available online: https://s.campbellsci.com/documents/eu/manuals/cs616_625%20-%20467.pdf (accessed on 13 January 2021).
- USDA. Keys to Soil Taxonomy, 12th ed.; Soil Survey Staff: Washington, DC, USA, 2014; 372p.
- Cockx, K.; Van Meirvenne, M.; De Vos, B. Using the EM38DD Soil Sensor to Delineate Clay Lenses in a Sandy Forest Soil. Soil Soc. Am. J. 2007, 71, 1314–1322. [Google Scholar] [CrossRef]
- IUSS Working Group WRB. World Reference Base for Soil Resources 2014, Update 2015 International Soil Classification System for Naming Soils and Creating Legends for Soil Maps; FAO: Rome, Italy, 2015. [Google Scholar]
- Giannetti, F.; Barbati, A.; Davide Mancini, L.; Bastrup-Birk, A.; Canullo, R.; Nocentini, S.; Chirici, G. European forest types: Toward an automated classification. Ann. For. Sci. 2018, 75, 6. [Google Scholar] [CrossRef] [Green Version]
- Zanella, A.; Ponge, J.-F.; Jabiol, B.; Sartori, G.; Kolb, E.; Le Bayon, R.-C.; Gobat, J.-M.; Aubert, M.; De Waal, R.; Van Delft, B. Humusica 1, article 5: Terrestrial humus systems and forms—Keys of classification of humus systems and forms. Appl. Soil Ecol. 2018, 122, 75–86. [Google Scholar] [CrossRef]
- Fleck, S.; Cools, N.; De Vos, B.; Meesenburg, H.; Fischer, R. The Level II aggregated forest soil condition database links soil physicochemical and hydraulic properties with long-term observations of forest condition in Europe. Ann. For. Sci. 2016, 73, 945–957. [Google Scholar] [CrossRef] [Green Version]
- Cools, N.; De Vos, B. Part X: Sampling and Analysis of Soil. In Manual on Methods and Criteria for Harmonized Sampling, Assessment Monitoring and Analysis of the Effects of Air Pollution on Forests; UNECE ICP Forests Programme Coordinating Centre, Ed.; Thünen Institute of Forest Ecosystems: Eberswalde, Germany, 2020; 115p, Available online: http://www.icp-forests.org/Manual.htm (accessed on 16 May 2021).
- Van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]
- De Vos, B.; Cools, N.; Ilvesniemi, H.; Vesterdal, L.; Vanguelova, E.; Carnicelli, S. Benchmark values for forest soil carbon stocks in Europe: Results from a large scale forest soil survey. Geoderma 2015, 251–252, 33–46. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria. Available online: http://www.R-project.org/ (accessed on 10 August 2021).
- Mazerolle, M.J.; AICcmodavg: Model Selection and Multimodel Inference Based on (Q)AIC(c). R Package Version 2.3-1. Available online: https://cran.r-project.org/package=AICcmodavg (accessed on 10 August 2021).
- Willmott, C.J.; Robeson, S.M.; Matsuura, K. A refined index of model performance. Int. J. Climatol. 2012, 32, 2088–2094. [Google Scholar] [CrossRef]
- De Vos, B.; Van Meirvenne, M.; Quataert, P.; Deckers, J.; Muys, B. Predictive quality of Pedotransfer functions for estimating bulk density of forest soils. Soil Sci. Soc. Am. J. 2005, 69, 500–510. [Google Scholar] [CrossRef]
- Schaap, M.; De Lange, L.; Heimovaara, T. TDR calibration of organic forest floor media. Soil Technol. 1997, 11, 205–217. [Google Scholar] [CrossRef]
- Kang, S.; van Iersel, M.W.; Kim, J. Plant root growth affects FDR soil moisture sensor calibration. Sci. Hortic. 2019, 252, 208–211. [Google Scholar] [CrossRef]
- Huisman, J.; Snepvangers, J.; Bouten, W.; Heuvelink, G. Monitoring temporal development of spatial soil water content variation: Comparison of ground penetrating radar and time domain reflectometry. Vadose Zone J. 2003, 2, 519–529. [Google Scholar] [CrossRef]
- Vereecken, H.; Huisman, J.; Pachepsky, Y.; Montzka, C.; Van Der Kruk, J.; Bogena, H.; Weihermüller, L.; Herbst, M.; Martinez, G.; Vanderborght, J. On the spatio-temporal dynamics of soil moisture at the field scale. J. Hydrol. 2014, 516, 76–96. [Google Scholar] [CrossRef]




| Thickness | Clay | Silt | Sand | Tex. Class | OLM 1 | ρb | pH- H2O | EC | TOC | TN | CEC 2 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Plot | Layer | cm | % | USDA | kg m−2 | kg m−3 | - | µS cm−1 | g kg−1 | g kg−1 | cmolc kg−1 | ||
| WIJ | OFH | 8.6 | - | - | - | - | 11.95 | 139 | 3.82 | - | 414.4 | 20.0 | 21.9 |
| M01 | 10 | 3.3 | 24.8 | 71.9 | SL | - | 1256 | 3.65 | 56.2 | 35.6 | 2.9 | 7.1 | |
| M12 | 10 | 3.8 | 23.8 | 72.4 | SL | - | 1335 | 3.24 | 64.5 | 18 | 1.2 | 8.9 | |
| M24 | 20 | 3.6 | 21.5 | 74.9 | LS | - | 1306 | 3.51 | 54.6 | 16.9 | 1.0 | 5.0 | |
| M48 | 40 | 5.9 | 21.9 | 72.2 | SL | - | 1505 | 3.83 | 41.9 | 10.1 | 0.7 | 4.3 | |
| RAV | OFH | 8.7 | - | - | - | - | 14.04 | 161 | 3.72 | - | 340.7 | 12.3 | 21.9 |
| M01 | 10 | 1.5 | 11.1 | 87.4 | S | - | 1453 | 3.76 | 169.2 | 18.9 | 0.7 | 1.35 | |
| M12 | 10 | 0.7 | 11.9 | 87.4 | S | - | 1429 | 3.85 | 142.7 | 21.3 | 0.6 | 4.7 | |
| M24 | 20 | 3.0 | 12.0 | 85.0 | LS | - | 1478 | 4.12 | 48.2 | 12.8 | 0.6 | 1.6 | |
| M48 | 40 | 1.4 | 12.4 | 86.2 | S | - | 1536 | 4.30 | 34.8 | 3.7 | <0.5 | 2.6 | |
| BRA | OFH | 7.4 | - | - | - | - | 11.10 | 150 | 3.93 | - | 392.5 | 14.0 | 18.3 |
| M01 | 10 | 2.0 | 5.9 | 92.2 | S | - | 1376 | 3.87 | 31.0 | 17.2 | 0.8 | 3.75 | |
| M12 | 10 | 1.8 | 5.9 | 92.3 | S | - | 1443 | 4.05 | 26.5 | 11.3 | 0.5 | 1.7 | |
| M24 | 20 | 1.0 | 6.2 | 92.8 | S | - | 1474 | 4.00 | 20.3 | 8.7 | <0.5 | 2.6 | |
| M48 | 40 | 1.6 | 5.4 | 93.0 | S | - | 1512 | 4.24 | 20.6 | 3.5 | <0.5 | 2.5 | |
| GON | OFH | 5.3 | - | - | - | - | 9.37 | 177 | 4.39 | - | 320.5 | 15.3 | 24.2 |
| M01 | 10 | 9.5 | 50.6 | 39.9 | SiL | - | 1128 | 3.71 | 99.6 | 52.6 | 3.0 | 13.4 | |
| M12 | 10 | 11.0 | 48.2 | 40.8 | L | - | 1367 | 3.78 | 90.7 | 17.9 | 1.2 | 8.8 | |
| M24 | 20 | 24.5 | 46.1 | 29.4 | L | - | 1416 | 3.90 | 68.1 | 10.5 | 0.6 | 9.4 | |
| M48 | 40 | 47.5 | 36.6 | 15.9 | C | - | 1441 | 4.24 | 53.8 | 5.7 | 0.5 | 14.9 | |
| HOE | OFH | 2.8 | - | - | - | - | 3.96 | 141 | 4.79 | - | 216.2 | 10.5 | 16.3 |
| M01 | 10 | 7.9 | 88.3 | 3.8 | Si | - | 1064 | 3.97 | 90.1 | 38.9 | 2.2 | 9.05 | |
| M12 | 10 | 14.4 | 81.8 | 3.8 | SiL | - | 1277 | 4.49 | 54.8 | 11.3 | 0.7 | 4.3 | |
| M24 | 20 | 13.5 | 81.3 | 5.2 | SiL | - | 1442 | 4.18 | 40.4 | 8.2 | 0.6 | 4.6 | |
| M48 | 40 | 19.1 | 76.9 | 4.0 | SiL | - | 1505 | 4.40 | 41.9 | 3.5 | <0.5 | 7.4 |
| Van Genuchten Parameters of Modeled Soil Water Retention Curve | Soil Moisture Characteristics | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| θr (m3 m−3) | θs (m3 m−3) | α (cm−1) | n | θfc (m3 m−3) | θpwp (m3 m−3) | ||||||||||||||
| Plot | Layer | A | B | C | A | B | C | A | B | C | A | B | C | A | B | C | A | B | C |
| WIJ | OFH | 0.150 | 0.150 | 0.058 | 0.665 | 0.689 | 0.769 | 0.150 | 0.150 | 0.150 | 1.405 | 1.296 | 1.297 | 0.32 | 0.39 | 0.37 | 0.17 | 0.20 | 0.13 |
| M02 | <0.001 | <0.001 | <0.001 | 0.503 | 0.517 | 0.529 | 0.021 | 0.021 | 0.029 | 1.261 | 1.297 | 1.227 | 0.39 | 0.39 | 0.40 | 0.11 | 0.09 | 0.13 | |
| M24 | <0.001 | <0.001 | 0.047 | 0.494 | 0.543 | 0.491 | 0.015 | 0.008 | 0.007 | 1.305 | 1.395 | 1.402 | 0.39 | 0.47 | 0.44 | 0.09 | 0.08 | 0.11 | |
| M48 | <0.001 | <0.001 | <0.001 | 0.385 | 0.346 | 0.390 | 0.011 | 0.007 | 0.019 | 1.314 | 1.446 | 1.371 | 0.32 | 0.30 | 0.28 | 0.08 | 0.04 | 0.05 | |
| RAV | OFH | 0.121 | 0.150 | 0.129 | 0.777 | 0.824 | 0.814 | 0.150 | 0.150 | 0.113 | 1.385 | 1.509 | 1.706 | 0.35 | 0.32 | 0.25 | 0.15 | 0.16 | 0.13 |
| M02 | 0.149 | 0.092 | 0.018 | 0.453 | 0.398 | 0.369 | 0.033 | 0.023 | 0.037 | 2.144 | 3.000 | 1.351 | 0.22 | 0.15 | 0.23 | 0.15 | 0.09 | 0.06 | |
| M24 | 0.067 | 0.063 | 0.044 | 0.449 | 0.463 | 0.388 | 0.021 | 0.023 | 0.045 | 2.924 | 3.000 | 1.178 | 0.15 | 0.14 | 0.30 | 0.07 | 0.06 | 0.15 | |
| M48 | 0.041 | 0.021 | <0.001 | 0.396 | 0.419 | 0.346 | 0.026 | 0.023 | 0.031 | 2.544 | 3.000 | 1.370 | 0.12 | 0.09 | 0.22 | 0.04 | 0.02 | 0.04 | |
| BRA | OFH | 0.096 | 0.637 | 0.150 | 1.258 | 0.36 | 0.17 | ||||||||||||
| M01 | <0.001 | 0.026 | <0.001 | 0.610 | 0.428 | 0.420 | 0.092 | 0.065 | 0.050 | 1.256 | 1.344 | 1.298 | 0.34 | 0.23 | 0.25 | 0.10 | 0.06 | 0.06 | |
| M12 | 0.074 | <0.001 | <0.001 | 0.401 | 0.453 | 0.459 | 0.049 | 0.039 | 0.047 | 1.801 | 1.366 | 1.310 | 0.16 | 0.27 | 0.28 | 0.08 | 0.04 | 0.06 | |
| M24 | 0.047 | <0.001 | <0.001 | 0.419 | 0.362 | 0.360 | 0.069 | 0.033 | 0.024 | 1.394 | 1.386 | 1.426 | 0.22 | 0.22 | 0.23 | 0.07 | 0.03 | 0.03 | |
| M48 | 0.005 | <0.001 | <0.001 | 0.320 | 0.371 | 0.332 | 0.005 | 0.031 | 0.040 | 1.488 | 1.226 | 1.386 | 0.29 | 0.28 | 0.19 | 0.04 | 0.09 | 0.03 | |
| GON | OFH | <0.001 | 0.795 | 0.150 | 1.141 | 0.46 | 0.27 | ||||||||||||
| M01 | <0.001 | 0.150 | 0.461 | 0.679 | 0.015 | 0.150 | 1.144 | 1.085 | 0.36 | 0.53 | 0.21 | 0.42 | |||||||
| M12 | <0.001 | <0.001 | 0.150 | 0.455 | 0.575 | 0.495 | 0.049 | 0.011 | 0.003 | 1.140 | 1.221 | 1.355 | 0.31 | 0.42 | 0.44 | 0.18 | 0.19 | 0.24 | |
| M24 | <0.001 | 0.150 | <0.001 | 0.363 | 0.471 | 0.539 | 0.005 | 0.001 | 0.134 | 1.312 | 1.933 | 1.066 | 0.29 | 0.45 | 0.42 | 0.10 | 0.17 | 0.33 | |
| M48 | <0.001 | 0.150 | <0.001 | 0.533 | 0.628 | 0.620 | 0.011 | 0.002 | 0.003 | 1.094 | 1.167 | 1.053 | 0.46 | 0.59 | 0.60 | 0.33 | 0.41 | 0.51 | |
| HOE | M01 | 0.055 | <0.001 | 0.150 | 0.507 | 0.490 | 0.552 | 0.006 | 0.005 | 0.006 | 1.312 | 1.139 | 1.236 | 0.40 | 0.43 | 0.47 | 0.17 | 0.27 | 0.29 |
| M12 | 0.109 | 0.116 | <0.001 | 0.436 | 0.448 | 0.424 | 0.003 | 0.003 | 0.002 | 1.318 | 1.642 | 1.313 | 0.38 | 0.38 | 0.38 | 0.20 | 0.15 | 0.15 | |
| M24 | 0.150 | <0.001 | <0.001 | 0.420 | 0.411 | 0.397 | 0.003 | 0.007 | 0.004 | 1.633 | 1.196 | 1.177 | 0.36 | 0.33 | 0.35 | 0.17 | 0.16 | 0.19 | |
| M48 | 0.045 | <0.001 | <0.001 | 0.395 | 0.420 | 0.396 | 0.011 | 0.014 | 0.002 | 1.149 | 1.173 | 1.203 | 0.33 | 0.32 | 0.37 | 0.21 | 0.17 | 0.20 | |
| Feature\Site | WIJ | RAV | BRA | GON | HOE |
|---|---|---|---|---|---|
| Date start sampling 1 | 11 March 2015 | 13 March 2015 | 13 March 2015 | 11 March 2015 | 27 February 2015 |
| Date end sampling | 21 March 2017 | 23 March 2017 | 23 March 2017 | 21 March 2017 | 21 March 2017 |
| Sampling frequency | monthly | monthly | monthly | monthly | monthly |
| Nb of sampling events | 25 | 25 | 25 | 25 | 26 |
| Nb of profiles | 3 | 3 | 3 | 3 | 3 |
| Nb of depths (layers) | 4 | 4 | 4 | 4 | 4 |
| Nb of calib. points | 300 | 300 | 300 | 300 | 300 |
| Attribute | Format/Unit | Description |
|---|---|---|
| TimeStamp | YYYY-mm-dd hh-mm-ss | Nearest FDR recording time to field sampling event (in UTC + 1) |
| PAi, j | μs | Period average raw sensor output for each profile i and depth j |
| ST j | °C | Soil temperature measured in profile i = 1 at depth j |
| ρb i, j | kg m−3 | Fine earth bulk density of profile i and depth j |
| θm i, j | g kg−1 | Soil water content by mass (gravimetric) |
| θv i, j | m3 m−3 | Soil water content by volume (volumetric) |
| Logger data | V, °C | Logger diagnostics: record ID, battery voltage, logger temperature |
| SITE | MPE | SDPE | RMSPE | dr |
|---|---|---|---|---|
| WIJ | 0.019 *** | 0.0008 NS | −0.015 *** | 0.14 *** |
| RAV | 0.016 *** | 0.0006 NS | −0.007 *** | 0.09 *** |
| BRA | 0.016 *** | −0.0013 * | −0.009 * | 0.08 * |
| GON | −0.030 NS | −0.0050 NS | −0.040 * | 0.16 ** |
| HOE | 0.015 *** | −0.0002 NS | −0.009 ** | 0.07 * |
| Site | Model | MPE | SDPE | RMSPE | dr |
|---|---|---|---|---|---|
| WIJ | LM | 0.026 *** | 0.007 *** | −0.012 *** | 0.096 *** |
| QM | 0.030 *** | 0.010 *** | −0.016 *** | 0.133 *** | |
| RAV | LM | 0.014 *** | 0.002 ** | −0.002 NS | 0.04 NS |
| QM | 0.013 *** | 0.002 NS | −0.004 * | 0.060 ** | |
| BRA | LM | 0.011 *** | 0.0004 NS | −0.005 NS | 0.04 NS |
| QM | 0.010 *** | −0.0002 NS | −0.006 * | 0.05 NS | |
| GON | LM | 0.084 *** | 0.014 * | 0.040 NS | −0.06 NS |
| QM | 0.140 ** | 0.040 * | 0.090 NS | 0.01 NS | |
| HOE | LM | 0.044 *** | 0.004 NS | 0.005 NS | −0.013 NS |
| QM | 0.055 *** | 0.011 * | −0.007 NS | 0.012 NS |
| Set 1 | Set 2 | ||
|---|---|---|---|
| Predictor | Rel.Inf | Predictor | Rel.Inf |
| ρbKop | 21.90 | θs | 15.66 |
| Depth | 9.80 | Depth | 11.48 |
| θs | 9.62 | θpwp | 9.64 |
| Clay | 9.45 | Clay | 8.98 |
| pH-H2O | 8.75 | EC | 8.25 |
| θr | 8.17 | pH-H2O | 7.96 |
| EC | 6.46 | CEC | 7.71 |
| θfc | 5.72 | θr | 7.58 |
| Sand | 5.44 | Sand | 6.76 |
| TOC | 4.55 | θfc | 6.01 |
| θpwp | 4.37 | ρb | 5.60 |
| TN | 2.91 | TOC | 3.17 |
| CEC | 2.86 | TN | 1.18 |
| WIJ | RAV | BRA | GON | HOE | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Layer | A | B | C | A | B | C | A | B | C | A | B | C | A | B | C |
| M01/OFH | 21 | 20 | 3 | 19 | 23 | 21 | 19 | 23 | 17 | 20 | 22 | 24 | 21 | 21 | 22 |
| M12 | 11 | 13 | 6 | 17 | 20 | 11 | 17 | 20 | 12 | 17 | 17 | 20 | 13 | 11 | 21 |
| M24 | 12 | 19 | 8 | 10 | 19 | 10 | 10 | 19 | 22 | 14 | 20 | 20 | 8 | 5 | 22 |
| M48 | 10 | 6 | 19 | 8 | 12 | 9 | 10 | 3 | 22 | 14 | 20 | 23 | 7 | 9 | 8 |
| WIJ | RAV | BRA | GON | HOE | |
|---|---|---|---|---|---|
| OFH | 2 | 4 | |||
| M01 | 16 | 5 | 3 | 5 | 3 |
| M12 | 6 | 4 | 2 | 5 | 1 |
| M24 | 1 | 3 | 2 | 4 | 2 |
| M48 | 1 | 1 | 2 | 10 | 1 |
| RMSPE (m3 m–3) | |||||
|---|---|---|---|---|---|
| Type of Soil | USDA Texture | Standard Function | Revised Function | Error Reduction | Reference |
| Sandy | Sand | 0.071 | 0.04 | −44% | This study |
| Sand | 0.017 | 0.006 | −65% | Dong et al. 2020 | |
| Sand | 0.058 | 0.016 | −72% | Vaz et al. 2013 | |
| Loamy sand | 0.068 | 0.035 | −49% | This study | |
| Loamy sand | 0.023 | 0.021 | −9% | Dong et al. 2020 | |
| Loamy sand | 0.034 | 0.004 | −88% | Varble & Chavez 2011 | |
| Sandy loam | 0.084 | 0.046 | −45% | This study | |
| Sandy clay loam | 0.039 | 0.012 | −69% | Vaz et al. 2013 | |
| Sandy clay loam | 0.049 | 0.034 | −31% | Vaz et al. 2013 | |
| Sandy clay loam | 0.156 | 0.043 | −72% | Vaz et al. 2013 | |
| Sandy clay loam | 0.147 | 0.021 | −86% | Varble & Chavez 2011 | |
| Loams | Loam | 0.102 | 0.052 | −49% | This study |
| Silt loam | 0.064 | 0.029 | −55% | This study | |
| Silt loam | 0.039 | Udawatta 2011 | |||
| Silt | 0.135 | 0.043 | −68% | This study | |
| Silty clay loam | 0.962 | 0.344 | −64% | Vaz et al. 2013 | |
| Silty clay loam | 0.04 | Udawatta 2011 | |||
| Clay loam | 0.157 | 0.043 | −73% | Vaz et al. 2013 | |
| Clay loam | 0.289 | 0.021 | −93% | Varble & Chavez 2011 | |
| Clay | Silty clay | 0.029 | Udawatta 2011 | ||
| Clay | 0.207 | 0.076 | −63% | This study | |
| Clay (heavy Clay) | 0.05–0.15 | 0.003–0.012 | −92% | Veldkamp 2000 | |
| Clay | 0.169 | 0.05 | −70% | Vaz et al. 2013 | |
| Organic | Organic | 0.218 | 0.05 | −77% | This study |
| Organic | 0.179 | 0.06 | −66% | Vaz et al. 2013 | |
| All soil types | 0.094 | 0.045 | −52% | This study | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Vos, B.; Cools, N.; Verstraeten, A.; Neirynck, J. Accurate Measurements of Forest Soil Water Content Using FDR Sensors Require Empirical In Situ (Re)Calibration. Appl. Sci. 2021, 11, 11620. https://doi.org/10.3390/app112411620
De Vos B, Cools N, Verstraeten A, Neirynck J. Accurate Measurements of Forest Soil Water Content Using FDR Sensors Require Empirical In Situ (Re)Calibration. Applied Sciences. 2021; 11(24):11620. https://doi.org/10.3390/app112411620
Chicago/Turabian StyleDe Vos, Bruno, Nathalie Cools, Arne Verstraeten, and Johan Neirynck. 2021. "Accurate Measurements of Forest Soil Water Content Using FDR Sensors Require Empirical In Situ (Re)Calibration" Applied Sciences 11, no. 24: 11620. https://doi.org/10.3390/app112411620
APA StyleDe Vos, B., Cools, N., Verstraeten, A., & Neirynck, J. (2021). Accurate Measurements of Forest Soil Water Content Using FDR Sensors Require Empirical In Situ (Re)Calibration. Applied Sciences, 11(24), 11620. https://doi.org/10.3390/app112411620