
On the Design of a Decision Support System for Robotic Equipment Adoption in Construction Processes




Abstract
:
1. Introduction
2. Preliminaries on Decision Theoretic Expert Systems
3. Development of the Prototype
3.1. Problem Domain
- UC1: Collaborative semi-autonomous transport and delivery of material and tools.
- UC2: Supervised and collaborative drilling.
- UC3: Supervised and collaborative cutting.
- UC4: Semi-autonomous/teleoperated marking and spraying.
- UC5: Supervised/semi-autonomous documenting.
3.2. Knowledgebase
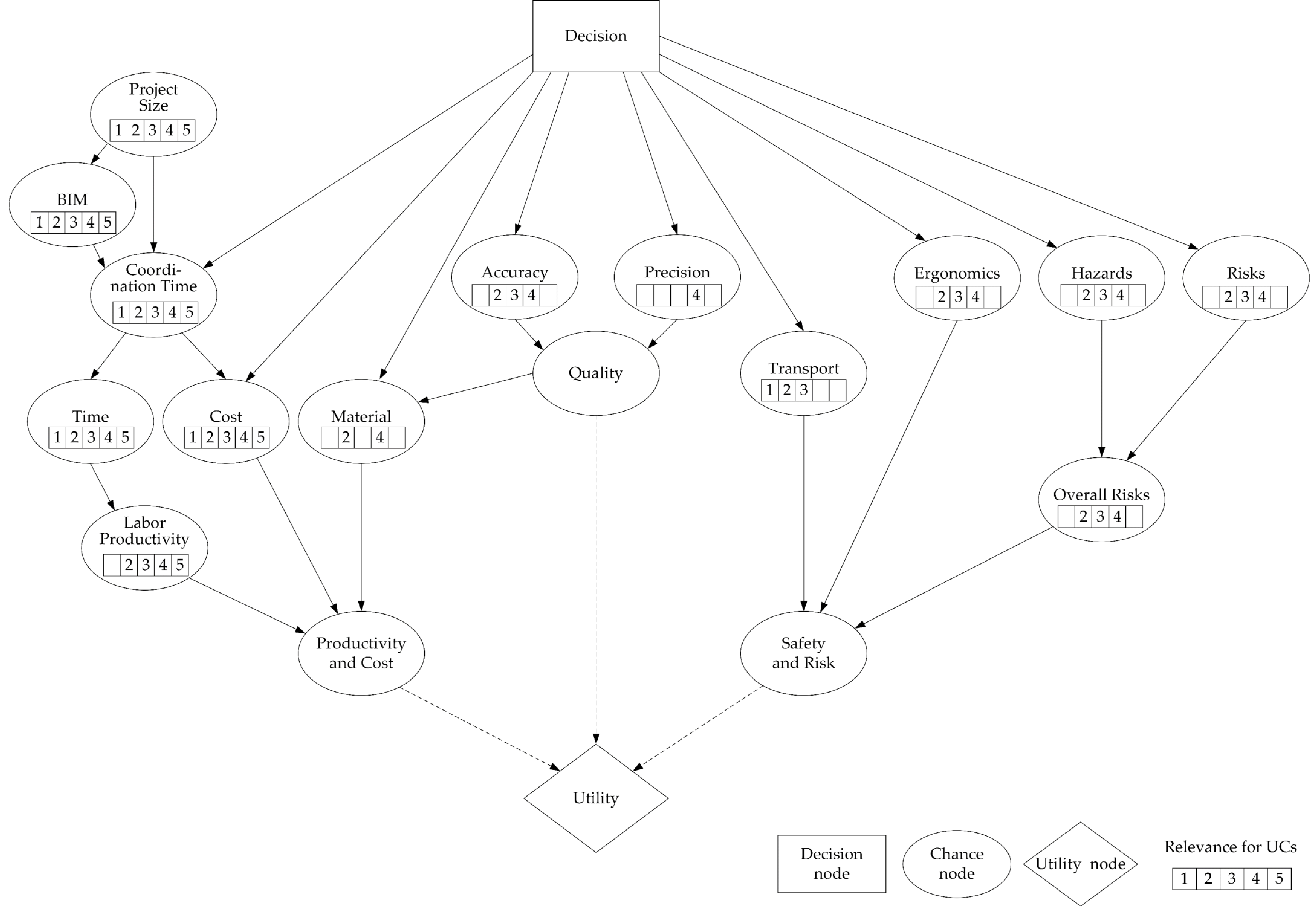
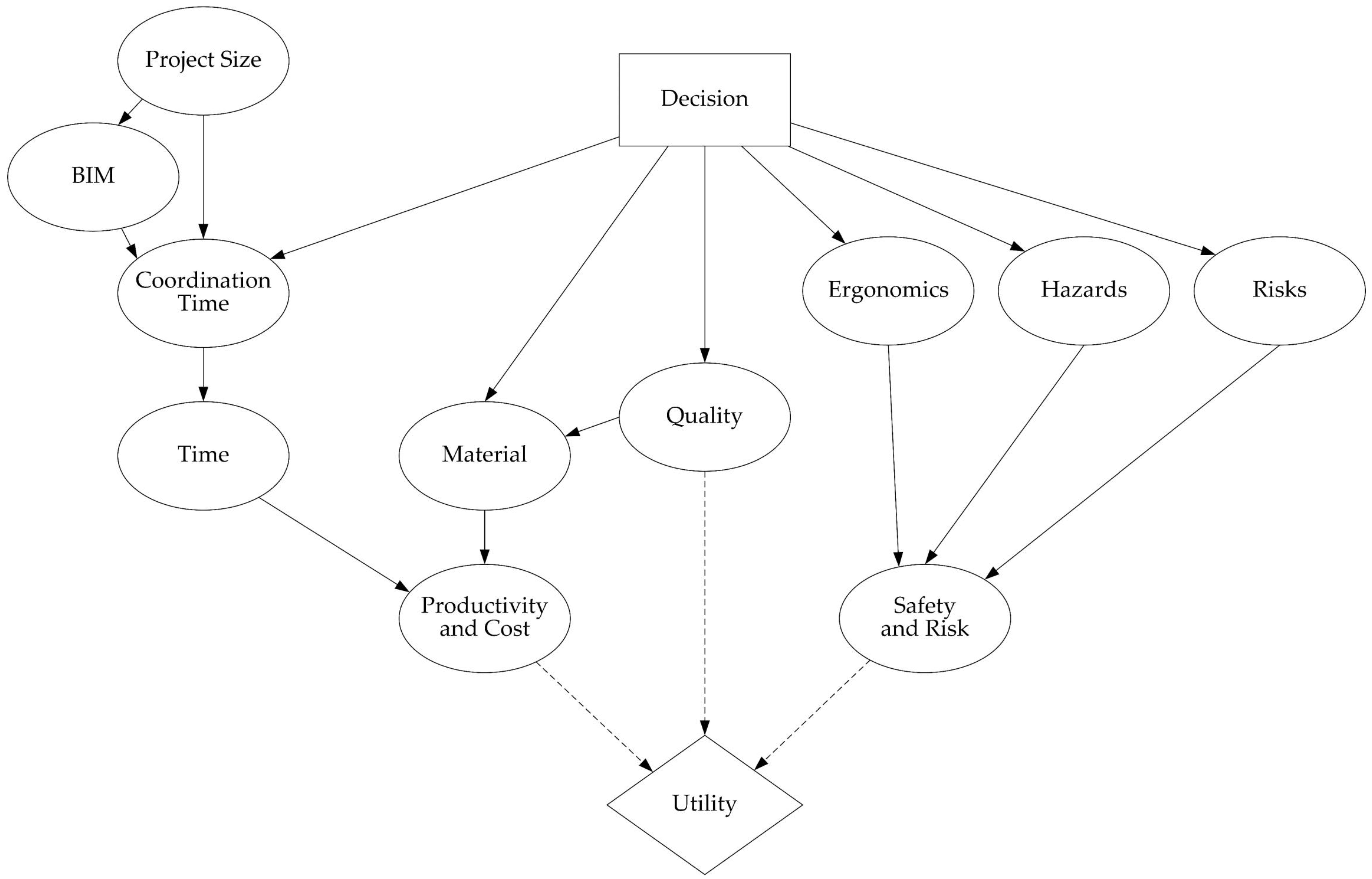
3.2.1. Qualitative Part
3.2.2. Quantitative Part
3.3. Inference Engine
3.3.1. MEU Computation
3.3.2. VOI Analysis
3.4. User Interaction
3.5. Evaluation
- if we consider equal weightings of preferences without adding evidence the preferred solution is the collaborative robot. Results change if we set evidence on the chance nodes BIM and PS. The conventional system is suggested if the BIM model is not available or if we have a small project. The robotic system is suggested if a BIM model is available or if we have a large project. Looking at the VPI we see that the best information to be acquired is the project size.
- if we focus on productivity and cost, the preferred solution is mostly the conventional system. Additionally, different settings of preferences and evidence have an impact on the decision and on the best information to be acquired by the user.
- if we focus on quality, the preferred solution is mostly the collaborative robot. The conventional system is mostly preferred if the BIM model is not available or if we have a small project.
- if we focus on safety, the preferred solution is mostly the collaborative robot. Here, the conventional manual process is suggested for only one preference setting and when the BIM model is not available or if we have a small project.
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dirican, C. The Impacts of Robotics, Artificial Intelligence On Business and Economics. Procedia—Soc. Behav. Sci. 2015, 195, 564–573. [Google Scholar] [CrossRef] [Green Version]
- Davila Delgado, J.M.; Oyedele, L.; Ajayi, A.; Akanbi, L.; Akinade, O.; Bilal, M.; Owolabi, H. Robotics and automated systems in construction: Understanding industry-specific challenges for adoption. J. Build. Eng. 2019, 26, 100868. [Google Scholar] [CrossRef]
- Pasetti Monizza, G.; Bendetti, C.; Matt, D.T. Parametric and Generative Design techniques in mass-production environments as effective enablers of Industry 4.0 approaches in the Building Industry. Autom. Constr. 2018, 92, 270–285. [Google Scholar] [CrossRef]
- Vähä, P.; Heikkilä, T.; Kilpeläinen, P.; Järviluoma, M.; Gambao, E. Extending automation of building construction—Survey on potential sensor technologies and robotic applications. Autom. Constr. 2013, 36, 168–178. [Google Scholar] [CrossRef]
- Carra, G.; Argiolas, A.; Bellissima, A.; Niccolini, M.; Ragaglia, M. Robotics in the Construction Industry: State of the Art and Future Opportunities. In Proceedings of the 35th International Symposium on Automation and Robotics in Construction (ISARC), Berlin, Germany, 20–25 July 2018; pp. 866–873. [Google Scholar]
- Aghimien, D.O.; Aigbavboa, C.O.; Oke, A.E.; Thwala, W.D. Mapping out research focus for robotics and automation research in construction-related studies: A bibliometric approach. J. Eng. Des. Technol. 2019, 18, 1063–1079. [Google Scholar] [CrossRef]
- Son, H.; Kim, C.; Kim, H.; Han, S.H.; Kim, M.K. Trend analysis of research and development on automation and robotics technology in the construction industry. KSCE J. Civ. Eng. 2010, 14, 131–139. [Google Scholar] [CrossRef]
- Bogue, R. What are the prospects for robots in the construction industry? Ind. Robot. Int. J. 2018, 45, 1–6. [Google Scholar] [CrossRef]
- Deloitte Global Powers of Construction. 2018. Available online: https://www2.deloitte.com/gr/en/pages/energy-and-resources/articles/deloitte-global-powers-of-construction-2018.html (accessed on 10 July 2021).
- Hampson, K.D.; Kraatz, J.A.; Sanchez, A.X. The Global Construction Industry and R&D. In R&D Investment and Impact in the Global Construction Industry; Routledge: New York, NY, USA, 2014; pp. 4–23. [Google Scholar]
- Arayici, Y.; Coates, P. A system engineering perspective to knowledge transfer: A case study approach of BIM adoption. Virtual Real.—Hum. Comput. Interact. 2012, 2006, 179–206. [Google Scholar]
- Brosque, C.; Skeie, G.; Fischer, M. Comparative Analysis of Manual and Robotic Concrete Drilling for Installation Hangers. J. Constr. Eng. Manag. 2021, 147. [Google Scholar] [CrossRef]
- Marcher, C.; Giusti, A.; Schimanski, C.P.; Matt, D.T. Application of Decision Support Systems for Advanced Equipment Selection in Construction. In Cooperative Design, Visualization, and Engineering; Luo, Y., Ed.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2019; Volume 11792, pp. 229–235. ISBN 978-3-030-30948-0. [Google Scholar]
- Dubois, A.; Gadde, L.-E. The construction industry as a loosely coupled system: Implications for productivity and innovation. Constr. Manag. Econ. 2002, 20, 621–631. [Google Scholar] [CrossRef]
- Hastak, M. Advanced automation or conventional construction process? Autom. Constr. 1998, 7, 299–314. [Google Scholar] [CrossRef]
- Marcher, C.; Giusti, A.; Matt, D.T. Decision Support in Building Construction: A Systematic Review of Methods and Application Areas. Buildings 2020, 10, 170. [Google Scholar] [CrossRef]
- Marzouk, M.; Abubakr, A. Decision support for tower crane selection with building information models and genetic algorithms. Autom. Constr. 2016, 61, 1–15. [Google Scholar] [CrossRef]
- Alshibani, A.; Elassir, H.; Al-Najjar, M.; Hamida, H. AHP based approach for crane selection of building construction in Saudi Arabia: A case study. In Proceedings of the Annual Conference–Canadian Society for Civil Engineering, Montreal, QC, Canada, 12–15 June 2019. [Google Scholar]
- Temiz, I.; Calis, G. Selection of Construction Equipment by using Multi-criteria Decision Making Methods. In Procedia Engineering; Elsevier Ltd.: Amsterdam, The Netherlands, 2017; Volume 196, pp. 286–293. [Google Scholar]
- Jankovic, I.; Djenadic, S.; Ignjatovic, D.; Jovancic, P.; Subaranovic, T.; Ristovic, I. Multi-criteria approach for selecting optimal dozer type in open-cast coal mining. Energies 2019, 12, 2245. [Google Scholar] [CrossRef] [Green Version]
- Zeynalian, M.; Dehaghi, I.K. Choice of optimum combination of construction machinery using modified advanced programmatic risk analysis and management model. Sci. Iran. 2018, 25, 1015–1024. [Google Scholar] [CrossRef] [Green Version]
- Kouch, A.M.; Illikainen, K.; Perälä, S. Key Factors of an Initial BIM Implementation Framework for Small and Medium-sized Enterprises (SMEs); International Association for Automation and Robotics in Construction (IAARC): Taipei, Taiwan, 2018; pp. 904–912. [Google Scholar]
- Azhar, S. Building Information Modeling (BIM): Trends, Benefits, Risks, and Challenges for the AEC Industry. Leadersh. Manag. Eng. 2011, 11, 241–252. [Google Scholar] [CrossRef]
- Follini, C.; Magnago, V.; Freitag, K.; Terzer, M.; Marcher, C.; Riedl, M.; Giusti, A.; Matt, D.T. Bim-integrated collaborative robotics for application in building construction and maintenance. Robotics 2021, 10, 2. [Google Scholar] [CrossRef]
- Giusti, A.; Magnago, V.; Siegele, D.; Terzer, M.; Follini, C.; Garbin, S.; Marcher, C.; Steiner, D.; Schweigkofler, A.; Riedl, M. BALTO: A BIM-Integrated Mobile Robot Manipulator for Precise and Autonomous Disinfection in Buildings against COVID-19. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 1730–1737. [Google Scholar]
- Brosque, C.; Skeie, G.; Örn, J.; Jacobson, J.; Lau, T.; Fischer, M. Comparison of construction robots and traditional methods for drilling, drywall, and layout tasks. In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–28 June 2020; pp. 1–14. [Google Scholar]
- Marcher, C.; Rauch, E.; Giusti, A.; Matt, D.T. Decision Support Systems in Building Construction–An Axiomatic Design Approach. In Proceedings of the IOP Conference Series: Materials Science and Engineering, The 14th International Conference on Axiomatic Design (ICAD 2021), Lisbon, Portugal, 23–25 June 2021; Volume 1174, p. 012004. [Google Scholar]
- Makovetskaya, E.; Deniskina, A.; Krylov, E.; Urumova, F. Organizational optimization of construction processes by virtue of robotization. In E3S Web of Conferences; Zheltenkov, A., Ed.; EDP Sciences: Les Ulis, France, 2019; Volume 91, p. 02036. [Google Scholar]
- Yan, R.-J.; Kayacan, E.; Chen, I.-M.; Tiong, L.K.; Wu, J. QuicaBot: Quality Inspection and Assessment Robot. IEEE Trans. Autom. Sci. Eng. 2019, 16, 506–517. [Google Scholar] [CrossRef]
- Suh, N.P. Axiomatic Design Theory for Systems. Res. Eng. Des. 1998, 10, 189–209. [Google Scholar] [CrossRef]
- Kjærulff, U.B.; Madsen, A.L. Bayesian Networks and Influence Diagrams: A Guide to Construction and Analysis, 2nd ed.; Information Science and Statistics; Springer: New York, NY, SUA, 2013; ISBN 978-1-4614-5103-7. [Google Scholar]
- Russell, S.J.; Norvig, P.; Davis, E. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice Hall Series in Artificial Intelligence; Prentice Hall: Upper Saddle River, NJ, USA, 2010; ISBN 978-0-13-604259-4. [Google Scholar]
- Howard, R.A.; Matheson, J.E. Influence Diagrams. Decis. Anal. 2005, 2, 127–143. [Google Scholar] [CrossRef] [Green Version]
- Liang, C.-J.; Kang, S.-C.; Lee, M.-H. RAS: A robotic assembly system for steel structure erection and assembly. Int. J. Intell. Rob. Appl. 2017, 1, 459–476. [Google Scholar] [CrossRef] [Green Version]
- Taghavi, M.; Iturralde, K.; Bock, T. Cable-driven parallel robot for curtain wall modules automatic installation. In Proceedings of the 35th International Symposium on Automation and Robotics in Construction (ISARC), Berlin, Germany, 20–25 July 2018; pp. 396–403. [Google Scholar]
- Hu, R.; Iturralde, K.; Linner, T.; Zhao, C.; Pan, W.; Pracucci, A.; Bock, T. A simple framework for the cost-benefit analysis of single-task construction robots based on a case study of a cable-driven facade installation robot. Buildings 2021, 11, 8. [Google Scholar] [CrossRef]
- Dakhli, Z.; Lafhaj, Z. Robotic mechanical design for brick-laying automation. Cogent Eng. 2017, 4, 1361600. [Google Scholar] [CrossRef]
- Lee, S.; Yu, S.; Choi, J.; Han, C. A methodology to quantitatively evaluate the safety of a glazing robot. Appl. Ergon. 2011, 42, 445–454. [Google Scholar] [CrossRef]
- Renooij, S.; Witteman, C. Talking probabilities: Communicating probabilistic information with words and numbers. Int. J. Approx. Reason. 1999, 22, 169–194. [Google Scholar] [CrossRef] [Green Version]
- van der Gaag, L.C.; Renooij, S.; Witteman, C.L.M.; Aleman, B.M.P.; Taal, B.G. Probabilities for a probabilistic network: A case study in oesophageal cancer. Artif. Intell. Med. 2002, 25, 123–148. [Google Scholar] [CrossRef]
- Gonzales, C.; Torti, L.; Wuillemin, P.-H. aGrUM: A Graphical Universal Model Framework. In Advances in Artificial Intelligence: From Theory to Practice; Benferhat, S., Tabia, K., Ali, M., Eds.; Springer International Publishing: Cham, Switzerland, 2017; Volume 10351, pp. 171–177. ISBN 978-3-319-60044-4. [Google Scholar]
- Liu, Q.; Ihler, A.T. Belief propagation for structured decision making. arXiv 2012, arXiv:1210.4897v1. [Google Scholar]
- Nilsson, D.; Lauritzen, S.L. Evaluating influence diagrams using LIMIDs. arXiv 2013, arXiv:1301.3881v1. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| 3.1 Problem domain Use of the collaborative robot or use of the conventional construction process? | ||
| 3.2 Knowledgebase | 3.3 Inference Engine | 3.4 User interaction |
| 3.2.1 Qualitative part | 3.3.1 MEU computation | Computation of results based on evidence and preferences. |
| Definition of the variables to be considered in the evaluation and definition of the relations between them. | Computation and selection of the decision that yields the MEU. | |
| 3.2.2 Quantitative part | 3.3.2 VOI analysis | |
| Definition of the numbers that are necessary for performing the computations. | Computation of which information should be acquired by the user. | |
| 3.5 Evaluation Evaluation of reasonableness of the output of the system. | ||
| KPI | Variable | Relevance | UC | Supporting Literature | Description | ||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||||
| 1 | Time | Productivity and Cost | x | x | x | x | x | [12,29,34] | Process time needed to perform the task |
| 2 | Cost | x | x | x | x | x | [12,26,28,34,35,36,37] | Average cost needed to perform the task | |
| 3 | Productivity | x | x | x | x | [28,29,35,36] | Labour productivity | ||
| 4 | Material | x | x | [36,37] | Consumption of material and resources needed to perform the task | ||||
| - | Coordination time | x | x | x | x | x | [26] | Time needed for preparing the execution of the task | |
| 5 | Accuracy | Quality | x | x | x | [12,26,28,29,35,36] | Number of errors | ||
| 6 | Precision | x | Quality of the performed work | ||||||
| 7 | Ergonomics | Safety and Risk | x | x | x | [12,26,37] | Reduction in unfavourable body postures during the execution of the task | ||
| 8 | Transports | x | x | x | Number of transport processes of heavy materials | ||||
| 9 | Hazards | x | x | x | [6] | Time of exposure to hazards and use of protection equipment | |||
| 10 | Risks | x | x | x | [36,38] | Reduction in the time of ladder use and working at heights | |||
| 11 | Overall risks | x | x | x | x | Overall assessment of risks that can lead to accidents | |||
| - | Project size | Project information | x | x | x | x | x | [28,37] | The project size can impact the decision of whether adopting a robot or not |
| - | BIM | x | x | x | x | x | [12,26] | The use of a BIM model is necessary for the deployment of the collaborative robot that is developed within the research project | |
| Variables | States of the Variables | ||
|---|---|---|---|
| Decision | Collaborative robot | Conventional method | |
| Ergonomics | 50% increase | unaltered | 50% reduction |
| Hazards | 80% reduction | unaltered | 80% increase |
| Risks | 50% reduction | unaltered | 50% increase |
| Material | 10% reduction | unaltered | 10% increase |
| BIM | available | not available | |
| Coordination time | 20% increase | unaltered | 10% reduction |
| Project size | <10,000 m3 | >10,000 m3 | |
| Time | 20% reduction | unaltered | 20% increase |
| Safety and Risk | 30% reduction in overall risk and increase in safety | unaltered | 30% increase in overall risk and reduction in safety |
| Quality | 20% reduction in errors and 30% reduction in variations | unaltered | 20% increase in errors and 30% increase in variations |
| Productivity and Cost | 20% increase in productivity and 10% reduction in cost | unaltered | 20% reduction |
| Quality (Q) | Decision (D) | Material (M) | ||
|---|---|---|---|---|
| Reduced | Unaltered | Increased | ||
| Increased | Conventional method | 0.05 | 0.90 | 0.05 |
| Collaborative robot | 0.90 | 0.05 | 0.05 | |
| Unaltered | Conventional method | 0.10 | 0.80 | 0.10 |
| Collaborative robot | 0.80 | 0.10 | 0.10 | |
| Reduced | Conventional method | 0.00 | 0.50 | 0.50 |
| Collaborative robot | 0.00 | 0.50 | 0.50 | |
| Productivity | uP | Quality | uQ | Safety | uS |
|---|---|---|---|---|---|
| Reduced | 0 | Reduced | 0 | Reduced | 0 |
| Unaltered | 100 | Unaltered | 100 | Unaltered | 100 |
| Increased | 100 | Increased | 100 | Increased | 100 |
| Preferences [%] | Result | Results with Evidence | VPI | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BIM | Project Size | |||||||||||||
| Not Available | Available | Small | Large | |||||||||||
| p | q | s | D | MEU | D | MEU | D | MEU | D | MEU | D | MEU | BIM | PS |
| 33 | 33 | 33 | R | 93.24 | C | 95.56 | R | 95.28 | C | 95.71 | R | 95.18 | 4.72 | 4.74 |
| 100 | 0 | 0 | C | 92.99 | C | 92.70 | C | 93.38 | C | 93.20 | C | 92.83 | 1.77 | 1.77 |
| 80 | 10 | 10 | C | 93.79 | C | 93.57 | C | 94.10 | C | 93.95 | C | 93.66 | 1.92 | 1.92 |
| 60 | 20 | 20 | C | 94.58 | C | 94.42 | C | 94.82 | C | 94.71 | C | 94.49 | 2.07 | 2.07 |
| 50 | 25 | 25 | C | 94.98 | C | 94.85 | R | 94.15 | C | 95.09 | R | 94.03 | 2.09 | 2.12 |
| 40 | 30 | 30 | C | 95.38 | C | 95.27 | R | 94.83 | C | 95.46 | R | 94.72 | 2.22 | 2.25 |
| 0 | 100 | 0 | R | 94.34 | R | 94.99 | R | 95.15 | R | 93.57 | R | 95.08 | 5.65 | 5.65 |
| 10 | 80 | 10 | R | 94.01 | C | 95.16 | R | 95.19 | C | 95.21 | R | 95.11 | 5.38 | 5.38 |
| 20 | 60 | 20 | R | 93.68 | C | 95.33 | R | 95.23 | C | 95.42 | R | 95.14 | 5.10 | 5.11 |
| 25 | 50 | 25 | R | 93.51 | C | 95.41 | R | 95.24 | C | 95.53 | R | 95.16 | 4.96 | 4.98 |
| 30 | 40 | 30 | R | 93.35 | C | 95.50 | R | 95.26 | C | 95.64 | R | 95.17 | 4.81 | 4.84 |
| 0 | 0 | 100 | R | 99.91 | R | 99.91 | R | 99.91 | R | 99.91 | R | 99.91 | 0.00 | 0.00 |
| 10 | 10 | 80 | R | 97.91 | R | 97.19 | R | 98.52 | R | 97.23 | R | 98.49 | 1.06 | 1.06 |
| 20 | 20 | 60 | R | 95.90 | R | 94.48 | R | 97.13 | R | 94.56 | R | 97.07 | 2.14 | 2.14 |
| 25 | 25 | 50 | R | 94.90 | R | 93.13 | R | 96.43 | R | 93.22 | R | 96.36 | 2.68 | 2.68 |
| 30 | 30 | 40 | R | 93.90 | C | 95.90 | R | 95.74 | C | 96.04 | R | 95.65 | 4.22 | 4.24 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marcher, C.; Giusti, A.; Matt, D.T. On the Design of a Decision Support System for Robotic Equipment Adoption in Construction Processes. Appl. Sci. 2021, 11, 11415. https://doi.org/10.3390/app112311415
Marcher C, Giusti A, Matt DT. On the Design of a Decision Support System for Robotic Equipment Adoption in Construction Processes. Applied Sciences. 2021; 11(23):11415. https://doi.org/10.3390/app112311415
Chicago/Turabian StyleMarcher, Carmen, Andrea Giusti, and Dominik T. Matt. 2021. "On the Design of a Decision Support System for Robotic Equipment Adoption in Construction Processes" Applied Sciences 11, no. 23: 11415. https://doi.org/10.3390/app112311415
APA StyleMarcher, C., Giusti, A., & Matt, D. T. (2021). On the Design of a Decision Support System for Robotic Equipment Adoption in Construction Processes. Applied Sciences, 11(23), 11415. https://doi.org/10.3390/app112311415