Abstract
As populations become concentrated in cities, traffic congestion increases, and urban air mobility (UAM) is being considered to face this problem. Accordingly, many institutions and companies around the world are developing UAM vehicles, building infrastructure, and researching flight operating systems. In this study, three holding area concepts have been designed that can control air traffic flows and avoid bad weather conditions when UAM vehicles are operating. These holding areas have been considered to allow UAM vehicles to fly by avoiding collisions with other UAM vehicles or structures such as buildings. After validating the turning radius analysis with existing aircraft, a case study on the holding area concept design for the Seoul–GyungIn area was performed to determine whether UAM vehicles can turn within a narrow radius. It was not possible for winged-type UAM vehicles to turn across the Han River at cruise speed. The holding area concepts and the turning procedure of this study can be used as guidelines when designing UAM corridors or UAM flight routes.
1. Introduction
Urban air mobility (UAM) is an operating system of an air vehicle that carries people or materials and operates at low altitudes in and out of the city [1]. In the low-altitude environment where UAM is operated, there are various obstacles (buildings, tower cranes, etc.), noise-sensitive areas, prohibited or restricted areas, etc. So, it is necessary to establish new airspaces and procedures to ensure safety. Therefore, UAM corridors are being designed based on the performance of the UAM vehicles so that they can be operated safely and efficiently at low altitudes. Communication, navigation, surveillance and information (CNSi) research and the establishment of a concept of operations are also in progress.
It is necessary to establish a low-altitude holding area in order for UAM vehicles to perform holding procedures at a narrow-low altitude or to return to an alternative vertiport other than the destination vertiport due to air traffic management or for the avoidance of bad weather conditions. However, the holding areas for existing aircraft (general and commercial aviation aircraft) do not have a defined radii or lengths, and it is impossible to apply them in the same way in low-altitude environments because legs are set at the time depending on the situation. In the low-altitude environment where there are many obstacles and the area is narrow, the holding area should be clearly defined, including its length and radius. In addition, the performance of the aircraft must be guaranteed so that procedures can be performed in the holding area at low altitude. In this study, a conceptual design of low-altitude holding areas for UAM operations has been created based on Seoul and the suburbs of Seoul, Korea. Additionally, configurations and the performance of the aircraft capable of performing procedures in the designed holding area have been analyzed. Figure 1 shows the concept of a holding area for conventional aircraft. The standard turning direction is right, and, in principle, the aircraft starts turning immediately after passing the holding fix.
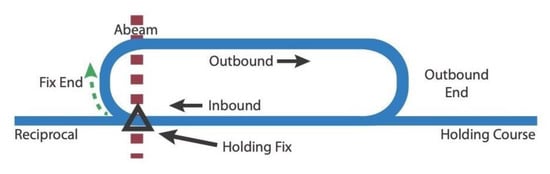
Figure 1.
FAA standard holding pattern [2].
2. UAM Vehicle and Airspace Environment Analysis
2.1. Characteristics Analysis by UAM Vehicle Type
UAM vehicles are classified into various types according to their operational purposes and characteristics. Most of them are being developed as vertical takeoff and landing (VTOL) vehicles that can be operated in urban environments. In addition, UAM vehicles are being developed in various configurations, and for this reason, their flight performances and procedures vary. For example, multicopter-type vehicles do not need transition modes. In addition, compared to winged-type aircraft, the flight speed is relatively slow and the turn rate is high. Conversely, for winged-type VTOL aircraft, transitions are required to switch from vertical takeoff and landing modes to cruise mode. At the same time, compared to multicopter vehicles, the flight speed is relatively high and the turn rate is low [3]. Table 1 shows the the classification and definition of vehicles according to their configurations.

Table 1.
UAM vehicle types [4].
Wingless-type vehicles are classified as multicopter types. These vehicles do not have fixed wings and are equipped with multiple propulsion units (motors and propellers). Winged-type vehicles with fixed wings are classified as the lift‒thrust type and vectored thrust type. First, the lift‒thrust-type vehicle is one in which the propulsion part for vertical takeoff and landing and the propulsion part for cruise mode operate independently. Due to its simple mechanical structure, it is lighter and cheaper than a vectored thrust-type vehicle. However, due to the propeller used for vertical takeoff and landing, it receives more drag. The vectored thrust-type vehicle includes tilt-prop and tilt-wing-type vehicles. It has complicated mechanical structures, making it the heaviest and most expensive, but it has the best flight performance because it is the fastest and can cover the longest distances [4].
Considering the holding of the vehicle, the wingless-type vehicle has good turning maneuverability due to its low speed and good turn rate. However, the winged-type vehicle has a high speed and a poor turn rate, so the turning maneuverability is not good.
2.2. UAM Airspace Environment Analysis through Concept of Operations (ConOps)
For this study, the characteristics of the low-altitude environment for operations of UAM vehicles have been analyzed through the UAM concept of operations. Conventional aircraft fly at high altitudes to avoid obstacles after takeoff. Therefore, they are not restricted by obstacles when cruising or performing various maneuvers such as holding, climbing and descending. Aircraft operating at high altitudes only need to maintain their separation from other nearby aircraft (traffic). The separation from other aircraft is under the charge of the air traffic controller (ATC). Additionally, the flight crew monitors the tracks of other aircraft visually and using radar.
Unlike the operations of conventional aircraft, UAM vehicles are exposed to various obstacles during operations. In particular, since UAM vehicles fly very close to urban buildings, structures, and natural obstacles, it is necessary to apply precision navigation systems and communication systems in UAM vehicles to enable more precise flight operations than for conventional aircraft. The U.S. Federal Aviation Administration (FAA) is establishing the concept that low-altitude unmanned aerial vehicles (drones) controlled by UTM (UAS traffic management) systems will operate at or below 400 ft above ground level (AGL). Additionally, UAM vehicles will operate within a UAM corridor when cruising above 400 ft AGL. Conventional aircraft operate over the entire airspace [5]. Figure 2 shows the FAA concept UAM, UTM, and air traffic management (ATM).
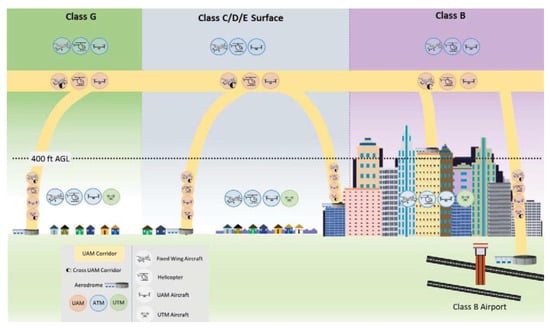
Figure 2.
FAA airspace concept for UAM, UTM and ATM [5].
Konkuk University and Korean Air are also establishing a similar concept of airspace by altitude. According to the concept they have established, UAM vehicles operate along the UAM corridor at altitudes between the airways of conventional aircraft and at or above 500 ft AGL. The provider services for UAM (PSU) manage the traffic flow through the urban air traffic management (UATM) systems so that UAM vehicles can operate safely. Below 500 ft AGL, low-altitude unmanned aerial vehicles operate, while conventional aircraft operate in airways or approved airspace. Figure 3 shows the interaction concept of ATM, UATM, and UTM [4].

Figure 3.
Airspace interaction concept [4].
In order for UAM vehicles, low-altitude unmanned aerial vehicles, and conventional aircraft to operate safely without collisions, flight track information should be exchanged through each traffic flow management system. For strategic collision avoidance, all vehicles and aircraft should submit operational flight plans, and for tactical collision avoidance, precise detect and avoid (DAA) systems should be applied in each vehicle and aircraft.
2.3. Establishment of Assumptions for UAM Flight Operations
Since UAM operating environments have not yet been fully developed or established to operate in low-altitude environments, operational assumptions are needed for this study. The assumptions for UAM vehicles to avoid collisions with other aircraft (current airplanes and unmanned aerial vehicles) and to operate safely are as follows [4]:
- Operations are carried out within the scope of established laws and policies.
- For safe operations, stakeholders also do their best to maintain safety and security.
- The UAM vehicle is designed and developed to be able to operate within certain airspaces and to satisfy required performances.
- It satisfies the communication navigation surveillance and information (CNSi) performances that are built for UAM operations by CNSi infrastructure agency.
- UAM can operate both controlled and uncontrolled zones within the range that allows strategic and tactical collision avoidance and separation. However, real-time information sharing should be available within ATM, UTM, and UATM.
- Various systems, infrastructure, and policies for UAM are flexibly applied according to the maturity level of development.
- During UAM operations, a situation must be considered in which all or part of the operating system (e.g., UATM systems, etc.) can suddenly shut down, so a backup system and an alternative system need to be installed.
In addition, for this study, specific assumptions are required for the conceptual design of holding areas for UAM vehicles. The current holding area is established at a high altitude not affected by obstacles, but holding areas for UAM vehicles are located in places where there are many obstacles and terrain constraints, so more conditions should be considered. Therefore, assumptions for UAM vehicles to enter the holding area and perform the procedure have been established as follows [6]:
- Holding areas are established in sections where the turning radius is permitted.
- UAM vehicles that satisfy the required performance can enter the holding area.
- When using the UAM corridor while cruising, autonomous flight is given priority, but the pilot can control the vehicle manually in the case of an abnormal situation.
- The UAM corridor size is based on CORUS’ RUNP-50m.
The assumptions about the concepts of UAM operations and holding areas established through this study can be changed as the concepts are expanded on in the future.
3. Holding Area Conceptual Design and Turning Performance Analysis
3.1. Holding Area Conceptual Design for Low-Altitude Environments
For UAM vehicles to fly safely in a low-altitude environment with many obstacles, UAM flight routes should be designed to ensure obstacle clearance and avoid noise-sensitive areas. Therefore, in this study, we aim to provide a conceptual design of the UAM holding area, which can be operated safely and efficiently in a low-altitude environment.
The characteristics of the UAM holding areas conceptually designed through this study are different from those of holding areas for current aircraft. In the holding procedure for conventional aircraft, the ‘1 min leg’ procedure is usually performed, in which each leg is flown for 1 min. Alternatively, the ‘mile leg’ procedure is performed, in which the aircraft flies for a set distance on each leg. Since the holding area for conventional aircraft is established at high altitudes, there is no risk of obstacles. If the 1 min leg procedure is followed, the length and shape of the holding area are not uniform due to the influence of wind. Therefore, when applied to the low-altitude environments in which UAM vehicles are operating, it may not be possible to secure a sufficient area to establish such holding areas due to the complex obstacles. Additionally, safety from obstacles cannot be guaranteed when UAM vehicles are performing holding procedures [6].
In order for UAM vehicles to safely operate in a low-altitude urban environment with many complex obstacles, UAM holding areas should be designed and established based on the vehicle performance and regional characteristics. Additionally, if the vehicle deviates from the flight route while performing the holding procedure, there is a high risk of encroaching on a prohibited area. Therefore, the vehicle operated must meet the required operational performance. In addition, UAM holding areas should be designed so that UAM vehicles can fly each leg based on distance, not time. This is because UAM vehicles can safely operate in a limited space through UAM holding areas. Additionally, the speed of UAM vehicles should be defined so that they can fly at a relatively low speed, and an appropriate bank angle and rate of turn standards should be established so that the vehicle does not deviate from the holding area [6].
Assumptions have been established for the conceptual design of UAM holding areas. The established assumptions are as follows and can be modified for a detailed UAM holding area design [6]:
- The UAM holding area serves as a link between UAM flight routes in opposite directions.
- The difference in altitude of the UAM flight routes is 1000 ft.
- Each UAM flight route is 100 m wide. (Apply RUNP-50) [7].
- The turning standard of UAM vehicles is the same right turn as that of conventional aircraft.
Through these considerations and assumptions, concepts of holding areas have been designed as shown in Figure 4. There are three conceptually designed holding areas, and they can be established differently depending on the regional characteristics. They are designed to be able to perform holding procedures at low altitudes, as well as to perform turning procedures in order to divert or fly over another flight route [6].
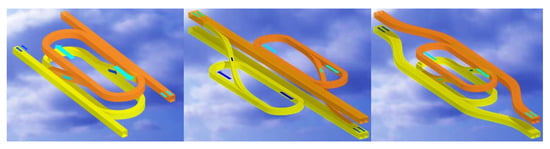
Figure 4.
UAM holding area concepts (left: 1/middle: 2/right: 3).
The holding area in concept 1 can be established in an area where each UAM flight route is set in the lateral direction or in a narrow area to avoid a prohibited area. Concept 1 has excellent space efficiency, but due to its complex design, it has the disadvantage of requiring precise situational awareness and the separation of UAM vehicles during the cruise, climb, and descent. Concept 1 is suitable for the UAM corridor of the Han River [6].
A holding area such as concept 2 can be established in areas where sufficient space is secured with few obstacles. Since the cruise flight route (enroute) is set in the longitudinal direction, there is an advantage that the turning section can be sufficiently secured. In addition, it has the advantage that the noise effect on the surrounding areas is small during cruising, but on the contrary, it has the disadvantage that it is impossible to build it in narrow areas [6].
A holding area such as concept 3 can be established in narrow areas that are sensitive to noise. Like concept 1, space can be used efficiently, and since the cruise route is set in the longitudinal direction, it has the advantage of having less of a noise effect on the surrounding area. However, due to the complicated structure of the holding area, precise situation awareness and separation of UAM vehicles is required, and all the UAM vehicles entering the holding area should reduce their speed, so the operational efficiency is reduced. Table 2 describes the three holding areas [6].
Table 2.
UAM holding area concepts [6].
3.2. Current Aircraft Turning Performance Analysis
In order to validate the turning performance in these holding areas, calculations have been performed to satisfy a bank angle of 25° or turn rate of 3°/s according to current aircraft flight procedure standards. Considering stalling, the maximum bank angle has been limited to 45° [8,9]. A Cessna 182T, a fixed-wing aircraft, and a Robinson R44, a rotary-wing aircraft, have been selected as the target aircraft for analysis. This is because these two aircraft are similar to the weight of UAM vehicles, so they are suitable for comparison when analyzing the turning performance of UAM vehicles. The bank angle, turning radius, and turn rate of the current aircraft at constant speed are as shown in Table 3 and the following equations.
Table 3.
Definition of variables.
For banked level turns by fixed-wing aircraft,
For the load factor,
For the turning radius of the banked level turn,
For the turn rate,
For rotorcraft, the turn rate and turning radius calculation is the same as for fixed-wing aircraft at the banked level turn.
First, the turning performance of the Cessna 182 aircraft was analyzed. The Cessna 182 is a four-seater, single-engine light aircraft with a maximum takeoff weight of 1406 kg and a cruising speed of 269 km/h [10]. The shape of Cessna 182 is shown in Figure 5, and its specifications are shown in Table 4.

Figure 5.
Cessna 182T [11].
Table 4.
Cessna 182 specifications (T Model) [10].
The result of the turning performance analysis of the Cessna 182T is shown in Figure 6. At a cruise speed of 74.7 m/s (about 269 km/h), the bank angle of 22° was calculated at a turn rate of 3°/s, and a turn rate of 3.5°/s was calculated at a bank angle of 25°. As a result of the turning radius calculation, the turning radius was derived as 1400 m when turning at a turn rate of 3°/s at cruise speed. When turning at a bank angle of 25°, the turning radius was calculated as 1220 m.
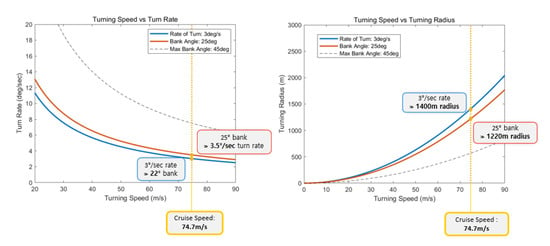
Figure 6.
Turning speed vs. turning rate (left) and turning speed vs. turning radius (right) of Cessna 182 aircraft.
To verify the validity of the calculation result, it has been compared with the result using the aircraft’s general turning performance (GTP) chart. The GTP chart is a graph that confirms how much turning radius is obtained by comparing the bank angle, rate of turn, and speed when an aircraft turns [12]. According to the GTP chart, when the Cessna 182 turns at a bank angle of 25° and cruise speed of 74.7 m/s (about 145 knots), it can turn with a radius of about 1280 m. With a difference of about 60 m, the result of the calculation is relatively similar to the actual situation. Figure 7 shows the GTP chart of the aircraft.
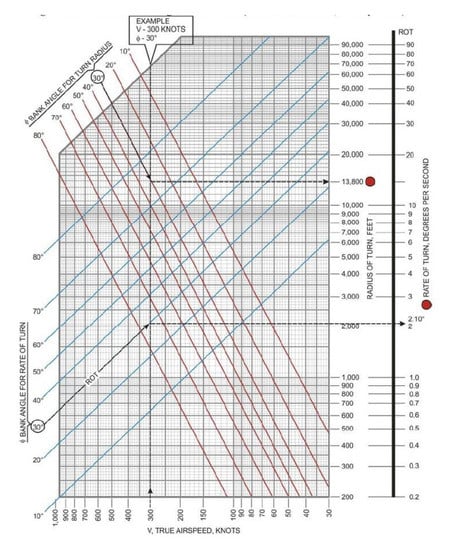
Figure 7.
General turning performance (GTP) chart [12].
Second, the turning performance has been analyzed using a Robinson R44 helicopter, which is most similar to multicopter-type UAM vehicles. The Robinson R44 is a lightweight helicopter that can carry up to three people, and the upgrade of a UAM using electric power is in progress [13]. A banked level turn analysis uses the same formula as that used for fixed-wing aircraft. The shape of Robinson R44 is shown in Figure 8, and its detailed specifications are shown in Table 5.

Figure 8.
Robinson R44 [14].
Table 5.
Robinson R44 specifications (Raven II) [15].
The result of the turning performance analysis of the Robinson R44 is shown in Figure 9. The cruise speed was not taken into account because rotorcraft can cruise at much lower airspeeds than fixed-wing aircraft. On the other hand, the bank angle can be applied as a more important factor when turning, because rotorcraft can turn in a narrow radius even with a small bank angle. Therefore, the Robinson R44 was able to turn within 400 m at any bank angle.
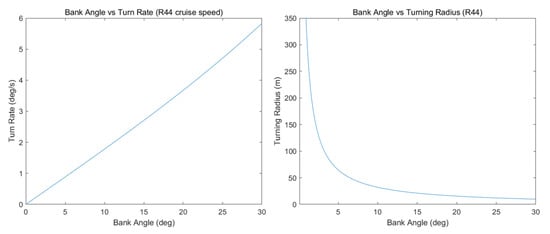
Figure 9.
Bank angle vs. turning radius (left) and bank angle vs. turn rate (right) of R44.
4. Case Study: Conceptual UAM Flight Routes and Establishment of Holding Areas
4.1. Analysis of Airspace Environment in Seoul–GyungIn Area
The target area of this study is the Seoul and GyungIn area. These areas were selected for the case study because the airspace structures such as prohibited areas, restricted areas, and danger areas are complex and there are control zones of two hub airports (Incheon International Airport and Gimpo International Airport). In addition, as 50% of the total population of Korea lives in the Seoul and GyungIn area, the possibility of using the service is high [16]. On the other hand, it is an optimal area for research and analysis for UAM flight routes and holding areas because there are various ground obstacles and noise-sensitive areas.
First, in terms of airspaces, the northern area of Seoul is surrounded by prohibited areas P-73A and P-73B, while R-75, a restricted area, surrounds the whole of Seoul in a polygonal shape. Since R-75 is set up to 10,000 ft AMSL (above mean sea level), prior approval is required for aircraft to enter Seoul. In addition, danger areas up to 1900 ft AGL (above ground level) have been established in Mokdong, Yeoksam, and Guui, etc. On the other hand, Incheon International Airport, Gimpo International Airport, and Seoul Air Base have a 5 NM (natural miles) radius control zone [1]. Figure 10 shows the various airspaces and noise-sensitive areas (marked in yellow) in the Seoul and GyungIn area.
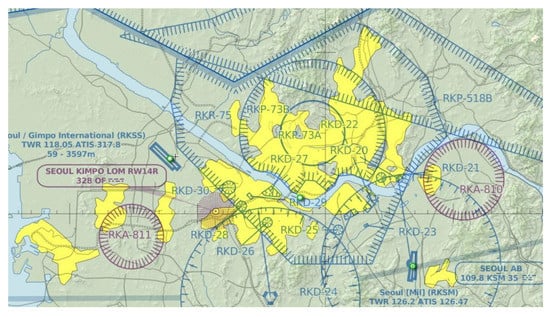
Figure 10.
Airspace of Seoul and GyungIn area [17].
In Seoul and its suburbs, VFR (visual flight rules) routes have been established for visual flight operations by helicopters and general aviation aircraft such as Cessna 172S. These flight routes enable safe flight operations by avoiding ground obstacles and specific airspaces. Each flight route has visual reporting points, and pilots are required to report each time they pass these points as they fly along these routes. Major VFR routes include the P-73 VFR route that surrounds the edge of Seoul, and the Han River Corridor (Yongsan Corridor, Nodeulseom Corridor) established along the Han River. In addition, Gimpo Airport VFR routes for arrival and departure from the airport have been established on the outskirts of Seoul [1]. Figure 11 shows the VFR routes in the Seoul and GyungIn area.
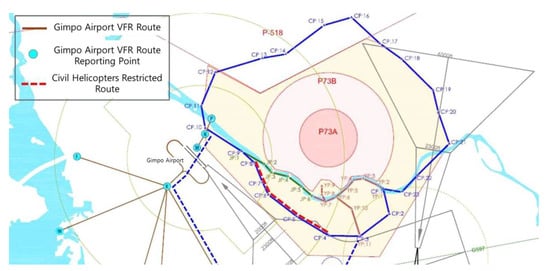
Figure 11.
VFR routes in Seoul and GyungIn area [18].
4.2. UAM Flight Routes Conceptual Design based on Seoul–GyungIn Area
To establish a holding area, UAM conceptual flight routes in the Seoul and GyungIn area have been established based on the UAM flight operations system, K-UAM roadmap published by the Korean government, and aeronautical information publications (AIP) [18,19]. The Seoul and GyungIn area comprises the cities with the highest population densities in Korea, and since it includes Incheon International Airport and Gimpo International Airport, it is highly possible that the first UAM operational services will be realized there. For this reason, UAM flight routes have been designed in the Seoul and GyungIn area. In Seoul, the VFR corridors of the Han River have been applied, and in the case of Incheon and western Gyeonggi-do, VFR flight routes connecting each visual reference point have been applied [16]. However, unlike conventional general aviation aircraft, UAM vehicles operate at low altitudes. Therefore, flight routes have been designed along rivers and major roads to avoid noise-sensitive areas and obstacles [1]. Figure 12 shows the UAM flight routes designed for the Seoul and GyungIn area.
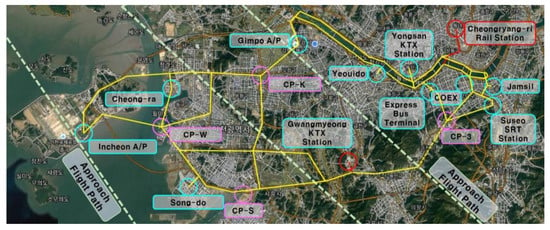
Figure 12.
UAM flight routes in Seoul and GyungIn area [1].
The UAM flight routes are managed by the monitoring and support of stakeholders such as Provider Services for UAM (PSU). For UAM vehicles to operate safely in low-altitude environments, an Urban Air Traffic Management (UATM) system should be established, and information should be exchanged through integration with current Air Traffic Management (ATM) providers [5]. In particular, in the Gimpo International Airport controlled area, it is possible to pass through visual reference points, but in order to pass through the center of the airport where current aircraft depart and arrive, it is necessary to open and close the UAM corridor. These procedures are carried out in collaboration between the PSU and air traffic controller (ATC).
In addition, if one UAM flight route is closed due to local severe weather or traffic jams, the Gimpo Airport UAM corridor and the Gwanaksan (Mt. Gwanak) UAM corridor have been established so that they could operate in other flight routes. These multiple flight routes are highly efficient because they allow continuous operation without the interruption of flights, even in local severe weather. In addition, since visual reference points and infrastructures are utilized, it is possible to quickly establish flight routes without many additional considerations [1].
4.3. Selecting Locations for Holding Area in Seoul–GyungIn Area
An analysis has been performed to determine where each holding area designed with the three concepts can be established. Each holding area concept should be applied to appropriate spaces according to its clear pros and cons. A concept 1 holding area can be established at three locations along the Han River Corridor [6]. There is a prohibited area to the north of the Han River, and there are many high-rise buildings to the south of the Han River. So, there are many restrictions to consider. Therefore, holding areas can be established in three places where straight flight routes for cruising are located so that the holding procedure could be performed within range of the Han River.
Compared to the other holding area concepts, concept 2 has fewer space constraints, so it can be established in relatively many places. In the case of the GyungIn area, compared to Seoul, the height of obstacles is not great, and establishing the holding area is relatively easy because there are open spaces and coasts. Therefore, concept 2 can be established between Yeongjongdo and Incheon, Songdo, Siheung, and Bucheon [6]. These holding areas can be utilized for detours due to bad weather conditions or for UAM vehicle flow management.
Concept 3 can be established in sections where the surrounding spaces are narrow and the speed of the UAM vehicle needs to be reduced for urban air traffic flow management. Anyang and Gwacheon, where spaces are narrow due to the mountainous terrain on both sides, and there is a need to reduce noise, and the west of Gangseo-gu, where Gimpo Airport is located, are suitable for concept 3 holding areas [6]. Figure 13 shows an example in which holding areas based on the three concepts can be established. The purple holding areas are concept 1, the light-blue holding areas are concept 2, and the green holding areas are concept 3. In particular, the holding areas around Gimpo Airport can be utilized when the UAM corridor passing through the airport is closed while the existing aircraft have to perform abnormal procedures, such as to go around.

Figure 13.
Concept of holding area location in Seoul and GyungIn area.
5. Case Study: UAM Vehicle’s Turning Performance Analysis and Validation
5.1. Selection of Holding Area Concept and UAM Vehicle for Turning Performance Analysis
A performance analysis has been conducted to confirm if UAM vehicles could turn within the radius of the conceptually designed holding areas. Additionally, in order for UAM vehicles to turn, an analysis has been performed on how to establish turning procedures such as the turning speed and back angle. A performance analysis of the turning radius is not necessary because conventional aircraft fly at a sufficiently high altitude without obstacles. However, since the holding areas for UAM established at low altitudes with many obstacles have a fixed radius, the UAM vehicles should be able to turn within that radius in order to perform holding procedures [6]. In addition, UAM vehicles should not be pushed out by crosswinds such that they deviate from the turning radius and should perform precise navigational flight. That is, the flight performance for turning should be satisfied.
In this study, the multicopter-type UAM vehicle, which is relatively easy to turn even in a narrow radius, has not been considered, and the performance has been analyzed mainly for fixed-wing-type UAM vehicles with high speeds and low turn rates compared to multicopter-type UAM vehicles. Additionally, among the three holding area concepts, the concept 1 holding area that requires the narrowest radius was targeted, and the turning radius was assumed to be 400 m (800 m in diameter) to enable flight operations within the width of the Han River [6]. The concept of the width of the Han River and the holding area applied to the Han River is shown in Figure 14. It is assumed in the performance analysis that the UAM vehicles are turning at a constant speed in fixed-wing mode.

Figure 14.
Han River width and applied holding area concept (concept 1) [6].
The UAM vehicles selected for the performance analysis of this study were the vectored thrust-type (tilt prop) UAM vehicle designed by Konkuk Aerospace Design · Airworthiness Institute (KADA) and the Optionally Piloted Personal Air Vehicle (OPPAV) designed by Korea Aerospace Research Institute (KARI), the same type of vehicle. The performance specifications of KADA’s UAM vehicle and KARI’s OPPAV are shown in Figure 15 and Table 6.

Figure 15.
KADA’s UAM vehicle (left) and KARI’s OPPAV (right) [20,21].
Table 6.
KADA’s UAM vehicle and KARI’s OPPAV specifications [20,21,22].
5.2. Turning Performance Analysis for Conceptual Holding Area Design Validation
Next, the turning performance of the UAM vehicle designed by KADA is analyzed. As shown in Figure 16, the bank angle was calculated as 17° at the turn rate of 3°/s and the turn rate was calculated as 4.7° at the bank angle of 25°. When turning at the cruise speed of 56.6 m/s (about 204 km/h), the turning radius at 3°/s was calculated as 1066 m, and the turning radius at 25° bank angle was calculated as 697 m. According to the calculation results, it is impossible for KADA’s UAM vehicle to turn within the range of 400 m, which is the turning radius defined by the cruise speed. In other words, when KADA’s UAM vehicle turns in the holding area of concept 1, it means that it must turn in a different way or via a different procedure.
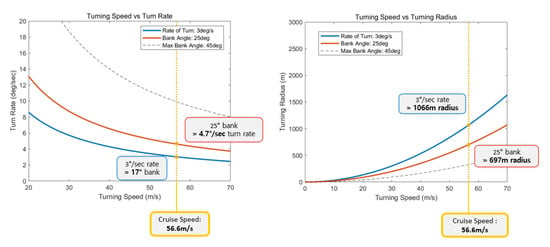
Figure 16.
Turning speed vs. turning rate (left) and turning speed vs. turning radius (right) of KADA’s UAM vehicle.
The turning performance of the OPPAV designed by KARI has also been analyzed. As a result of the calculation, the bank angle was 20° at the turn rate of 3°/s, and the turn rate was 3.9° at the bank angle of 25°. When performing the turn procedure at the OPPAV cruise speed of 66.9 m/s (about 241 km/h), the turning radius of 3°/s was calculated as 1328 m, and the turning radius at the bank angle of 25° was calculated as 981 m. Like KADA’s UAM vehicle, OPPAV cannot turn within a radius of 400 m at cruise speed. OPPAV also requires different methods or procedures when turning in the holding area of concept 1. The graph of the performance analysis calculation results of OPPAV is shown in Figure 17.
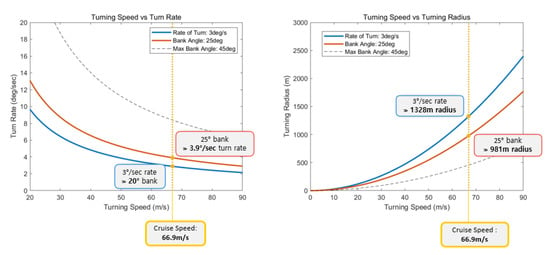
Figure 17.
Turning speed vs. turning rate (left) and turning speed vs. turning radius (right) of KARI’s OPPAV.
5.3. Analysis Results
From the analysis of the turning performance using the UAM vehicle designed by KADA and OPPAV designed by KARI, it was found that the two UAM vehicles could not turn within the 400 m radius, which is the radius of the holding area concept 1 that can be established in the Han River at cruising speed. On the other hand, the rotorcraft R-44 was able to turn at cruise speed even within a radius of 400 m. Therefore, in order for UAM vehicles to operate in the Han River, wingless-type UAM vehicles flying at low speeds should be operated, or winged-type UAM vehicles should be operated at lower speeds than the cruise speed before performing the turning procedure in the holding area. In other words, this means either that UAM vehicles that meet the required performance should be operated or that they should be operated by changing the procedure.
6. Conclusions
Through this study, three holding area concepts have been designed based on various airspace, terrain conditions and the performance of UAM vehicles. By analyzing the turning performance of two winged-type UAM vehicles, it has been verified as to whether the turning radius could be satisfied within the defined cruise speed. The result is that the wingless-type UAM vehicle was able to turn because it flew at a low speed, but the winged-type UAM vehicles were unable to turn within the specified turning radius.
However, the results of this study do not mean that winged-type UAM vehicles cannot be operated in the holding area. It is possible for them to operate by decelerating to a speed lower than the cruise speed, by changing the cruise mode of the UAM vehicle to the turning mode, or by performing the turning procedure for winged-type UAM vehicles. In addition, if the turning radius of the holding area is larger than the studied radius, it is possible to turn at a higher speed. In other words, the conclusion presented in this study is meaningful in that it is necessary to satisfy the performance factors and establish holding procedures for UAM vehicles to operate safely, rather than considering the possibility of operating winged-type UAM vehicles. In addition, the results of this study can be used as guidelines when designing UAM corridors or UAM flight routes. In particular, the designed holding area concepts can be used to determine the appropriate shape and design according to the cruise speed by adjusting the turning radius and distance.
Author Contributions
Conceptualization, Y.L. and J.L.; validation, Y.L. and J.L.; formal analysis, Y.L. and J.L.; investigation, Y.L.; resources, J.L.; data curation, Y.L. and J.L.; writing—original draft preparation, Y.L.; writing—review and editing, Y.L., J.L. and J.-W.L.; visualization, Y.L. and J.L.; supervision, J.-W.L.; project administration, J.-W.L.; funding acquisition, J.-W.L. All authors have read and agreed to the published version of the manuscript.
Funding
This study has been carried out with the support of the 2020 National Research Foundation Basic Research Project (No. 2020R1A6A1A03046811) and the Ministry of Land, Infrastructure and Transport/Research Project of the Land, Infrastructure and Korea Agency for Infrastructure Technology Advancement (No. 21ACTO-B151661-03).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare on conflict of interest.
References
- Lee, Y.J.; Kwag, T.H.; Jeong, G.M.; Ahn, J.H.; Chung, B.C.; Lee, J.W. Flight routes establishment through the operational concept analysis of Urban Air Mobility system. J. Korean Soc. Aeronaut. Space Sci. 2020, 48, 1021–1031. [Google Scholar] [CrossRef]
- Burnside, J. Hold Everything. Aviation Safety. Available online: https://www.aviationsafetymagazine.com/features/hold-everything/ (accessed on 14 September 2021).
- Baur, S.; Schickram, S.; Homulenko, A.; Martinez, N.; Dyskin, A. Roland Berger Focus—Urban Air Mobility; Roland Berger: Munich, Germany, 2018; pp. 13–14. [Google Scholar]
- Lee, J.W.; Gong, B.H. Urban Air Mobility (UAM) Concept of Operations v1.0—The Beginning of Next-Generation Urban Flight; Konkuk University and Korean Air: Seoul, Korea, 2021; pp. 7–15. [Google Scholar]
- Bradford, S. Concept of Operations v1.0—Urban Air Mobility (UAM); Federal Aviation Administration (FAA): Washington, DC, USA, 2020; pp. 4–5.
- Lee, J.S.; Lee, Y.J.; Kwag, T.H.; Kang, B.Y.; Min, J.S.; Lee, J.W. A study on the conceptual design of holding area for flight of Urban Air Mobility (UAM) and establishment of suitable places. In Proceedings of the 2021 KSAS Spring Conference, Samcheok, Korea, 2021; p. 7. [Google Scholar]
- European Union. U-space Concept of Operations. In CORUS Consortium; European Union: Brussels, Belgium, 2019; pp. 36–37. [Google Scholar]
- Section 3. En Route Procedures. Federal Aviation Administration (FAA). Available online: https://www.faa.gov/air_traffic/publications/atpubs/aim_html/chap5_section_3.html (accessed on 14 September 2021).
- Duncan, J.S. Airplane Flying Handbook; Federal Aviation Administration (FAA): Washington, DC, USA, 2016; p. 118.
- Cessna 182 Skylane. Wikipedia. Available online: https://en.wikipedia.org/wiki/Cessna_182_Skylane (accessed on 15 September 2021).
- Pingstone, A. File: Cessna182T Skylane N2231F Cotswold Airshow 2010 arp.jpg. Wikimedia Commons. Available online: https://commons.wikimedia.org/wiki/File:Cessna182t_skylane_n2231f_cotswoldairshow_2010_arp.jpg (accessed on 15 September 2021).
- Hoon, N.R. The Aviation Calculation. Blog: How to Fly. 24 August 2020. Available online: https://blog.daum.net/skyfalcon/47 (accessed on 28 September 2021).
- Thurber, M. Eco Helicopters Launching Urban Air Mobility Operations. AINonline. 25 September 2020. Available online: https://www.ainonline.com/aviation-news/general-aviation/2020-09-25/eco-helicopters-launching-urban-air-mobility-operations (accessed on 15 September 2021).
- R44 Raven II & Clipper II. Robinson Helicopter Company. Available online: https://robinsonheli.com/r44-specifications/ (accessed on 15 September 2021).
- Robinson R44. Wikipedia. 31 July 2021. Available online: https://en.wikipedia.org/wiki/Robinson_R44 (accessed on 15 September 2021).
- Kim, K.W. The Metropolitan Area’s Population Exceeds 50% of the Total Population of Korea for the First Time in History. Hani, 6 January 2020. Available online: https://www.hani.co.kr/arti/area/area_general/923381.html (accessed on 14 September 2021).
- SkyVector—Aeronautical Charts. SkyVector. Online. Available online: https://skyvector.com/ (accessed on 14 September 2021).
- AIP (Aeronautical Information Publication). ENR 1.2 Visual Flight Rules; Office of Civil Aviation: Seoul, Korea, 2018; p. 27.
- Joint Republic of Korean Government. K-UAM Roadmap; Joint Republic of Korean Government: Sejong, Korea, 2020; p. 21.
- Ahn, J.H.; Zin, W.T.; Lee, J.R.; Lee, Y.J.; Min, J.S.; Tyan, M.; Nah, S.H.; Lee, J.W. Performance operational analysis study on hydrogen fuel cell Urban Air Mobility. In Proceedings of the 2020 KSAS Fall Conference, Jeju, Korea, 18–20 November 2020; p. 7. [Google Scholar]
- OPPAV Development Group. OPPAV Configuration; OPPAV Development Group: Daejeon, Korea, 2020. [Google Scholar]
- KARI OPPAV. Electric VTOL News, Vertical Flight Society. Available online: https://evtol.news/kari-pav/ (accessed on 14 September 2021).



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).