3. Results and Discussion of the Propulsion System Design
The main design goal is to achieve a propeller that is optimised for cruising, since cruising represents the majority of the mission time for the Wigeon eVTOL investigated herein. This approach does not necessarily result in the propeller design that will minimise the energy consumption over the whole mission but allows one to select a single design-point which will be reasonably close to the optimum without the need for an optimisation for the whole mission profile. However, sizing the propellers with only the cruise requirements results in small propellers that do not allow one to reach the necessary thrust requirements of other mission phases, such as hover. Thus, an extra factor is applied to the target design thrust to obtain a propeller whose thrust range is wide enough to satisfy all mission phases. The procedure to select this factor is to first try a factor of 1 that multiplies the cruise thrust, and then check the maximum available thrust with the resulting propeller geometry for the other mission phases, and accept the design if the design meets the thrust requirements. If not, the factor is increased and the procedure is iteratively repeated. With this, a factor of 2.6 is obtained as the minimum factor to achieve the necessary thrust for all mission stages other than cruising. This factor, applied to the cruise thrust of 153.63 N per propeller, results in a design thrust of 400 N per propeller. The flight conditions at the design point are a cruise speed of 72.19 m/s at a height of 1 km. The atmospheric values for density, temperature, and dynamic viscosity were obtained from the International Standard Atmosphere.
Before designing the blades, the propeller dimensions need to be defined. For the Wigeon, all clearances are assumed to be 0.3 m. This value was selected to be in the order of magnitude of the expected propeller radius, but it has not been a result of a detailed analysis since the effects of propeller clearance are not accounted for in this design framework; this is further explained in
Section 3.3. The effect that these clearances have on the propeller performance and noise are very complex and cannot be calculated with the tools presented in this preliminary design framework, and they remain as future work for further design stages of the aircraft. The half span and fuselage width came from aerodynamic and cabin design requirements detailed in the original project report [
3]. Only the number of propellers remains to be chosen in order to obtain the propeller radius. From the shortlisted possibilities of the number of propellers (8, 12, and 16), having eight propellers was ruled out because maximising the radius would lead to propellers with a 1 m radius, which would not be acceptable for ground clearance requirements when the wings are in the horizontal position. Having eight propellers with smaller (non-maximised) radius would be a solution to this, but it would eliminate the benefits of having less propellers. Having 16 propellers would lead to propellers with only 0.3 m of radius and a hover disk loading above 600 kg/m
. The small radius would already pose problems with the wing and nacelle blocking the slipstream. Moreover, a disk loading of 600 kg/m
is above the desired value for the Wigeon, as it is closer to the expected disk loadings of reference lift-fan architectures than to that of tilt-wing aircraft [
15]. Therefore, the selected number of propellers is 12, meaning 3 propellers per half wing.
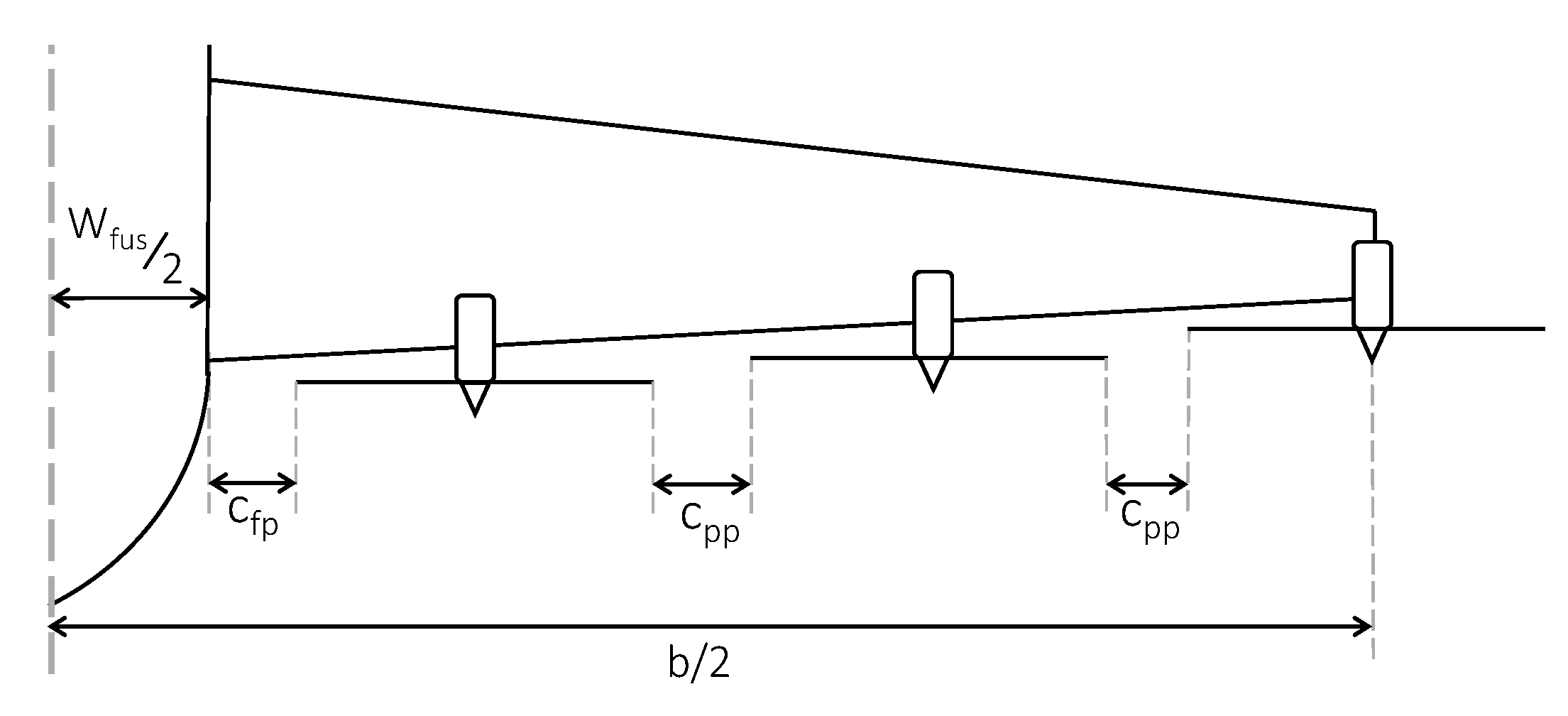
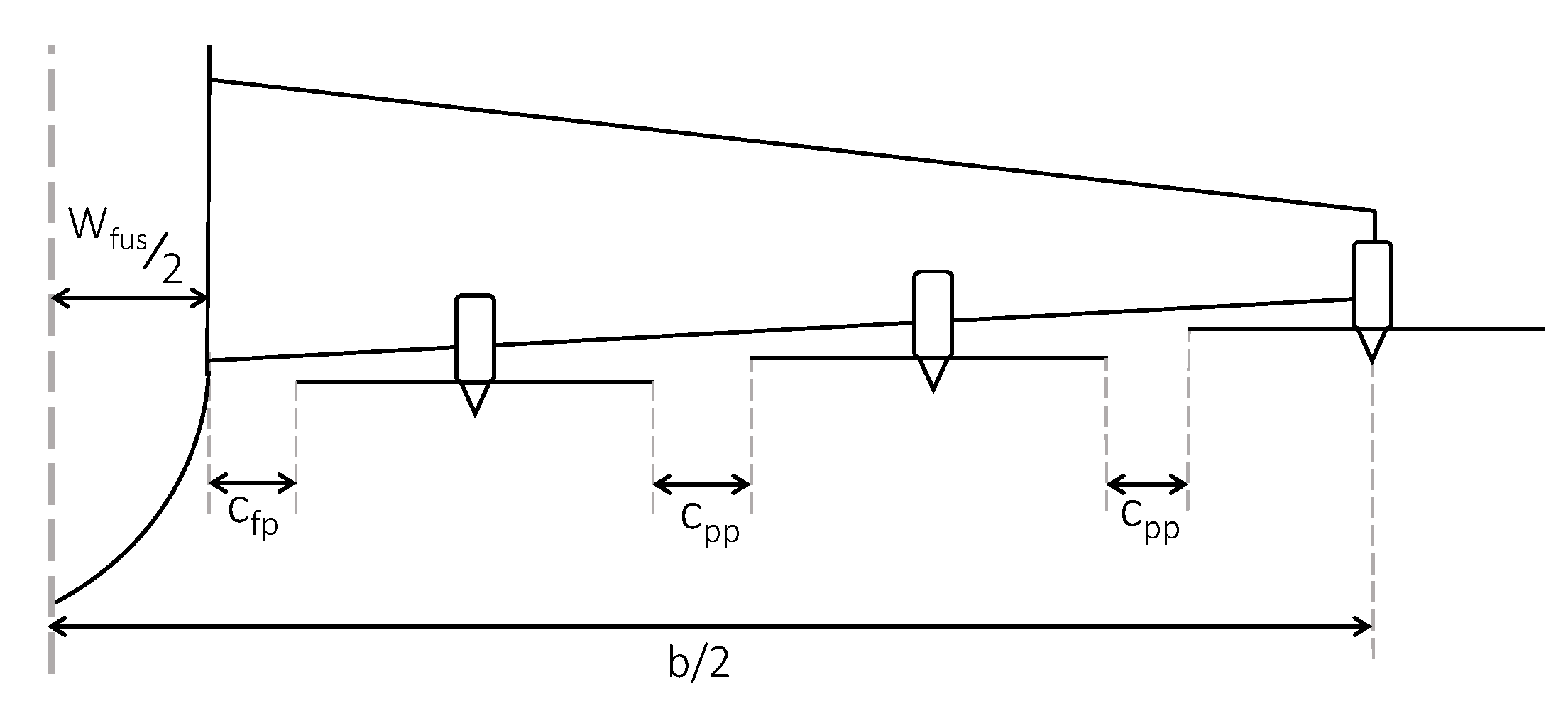
For 3 propellers per half wing—with clearances of 0.3 m, a fuselage width of 1.38 m and a span of 8.2 m—the final radius of the propellers is 0.5029 m, resulting in a disk loading of 317.25 kg/m
. These dimensions also define the spanwise positioning of the propellers, as defined in
Figure 5.
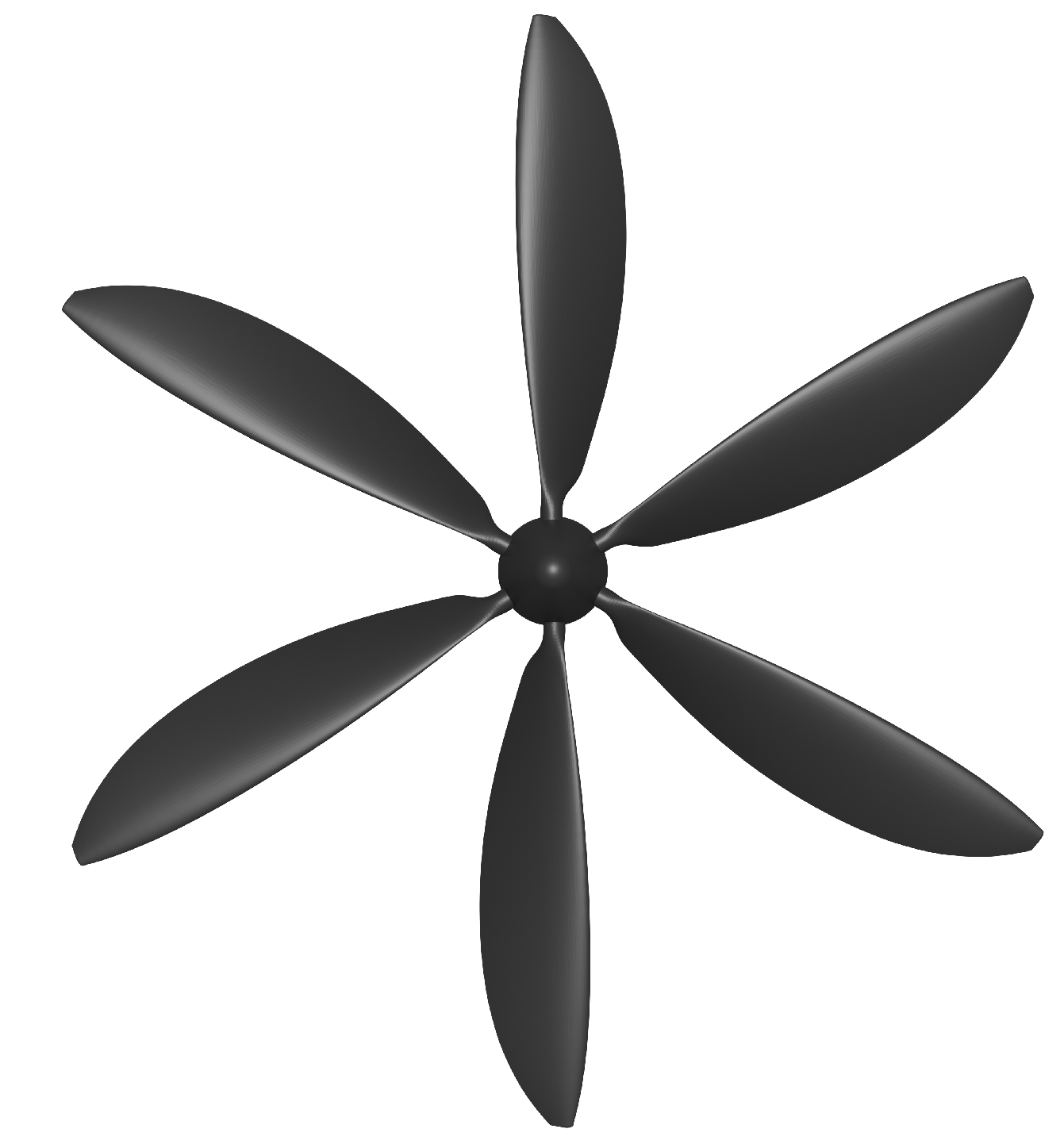
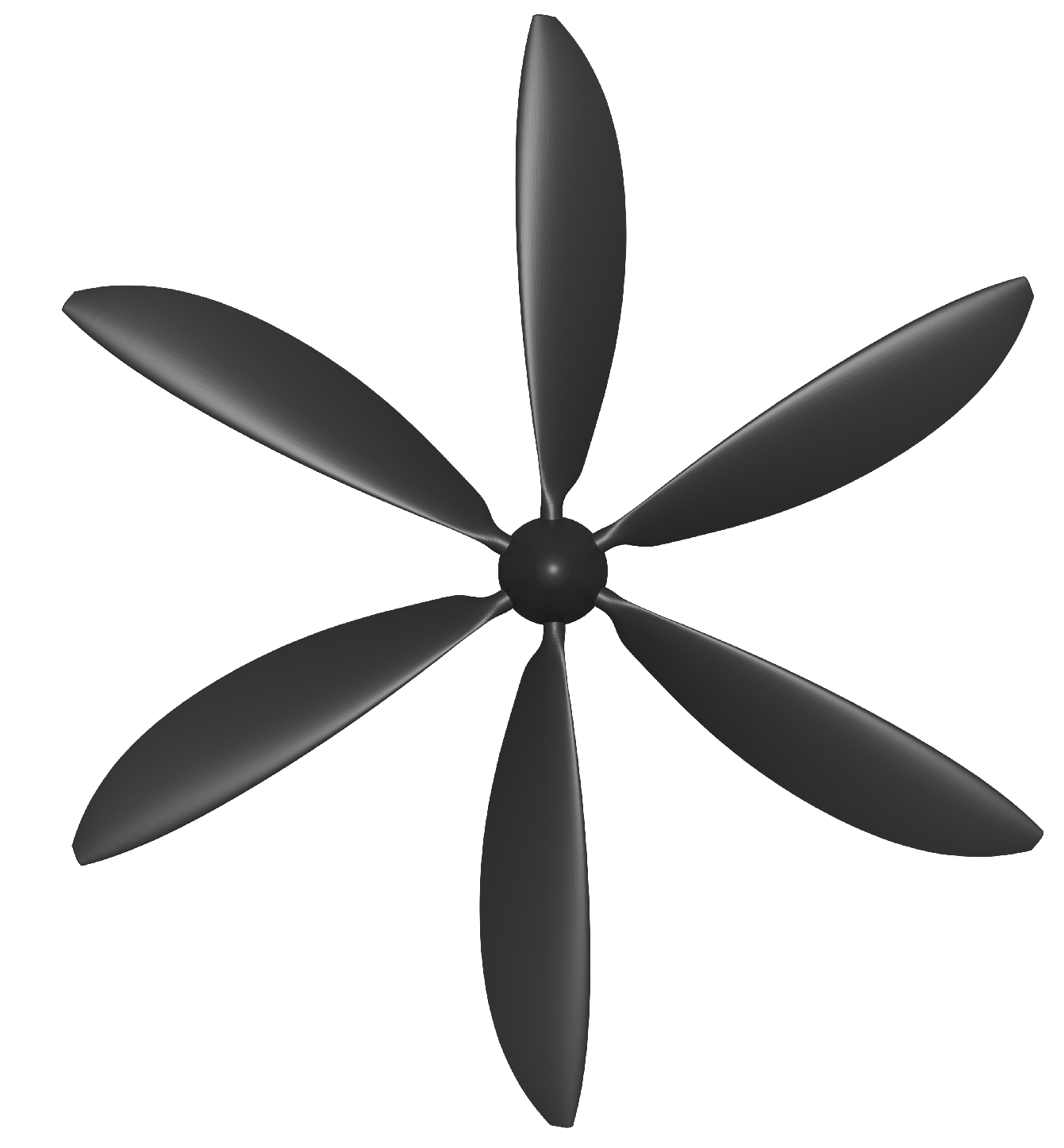
The chosen number of blades of the propeller is 6. This number is based on the noise and manufacturing considerations previously mentioned, and on that fact that more blades result in higher efficiency, as seen in the sensitivity analysis presented in
Section 3.2.1. Moreover, the non-dimensional hub radius,
0, is assumed to be 0.1.
The last parameter needed is the rpm at the design condition. The maximum allowable rpm level is 4791 based on a limit tip Mach number of 0.75. Going beyond this Mach number may result in shock waves at the tips that would lead to additional losses due to wave drag and to high noise levels. The exact maximum allowable Mach number beyond which shock waves develop depends on the airfoil and loading conditions of the blade, and may be in excess of 0.75, but this number is chosen to simplify the analysis procedure presented herein while ensuring that the maximum value is below a safe threshold. With this maximum value in mind, it was chosen to design the propellers for 1350 rpm at the design condition. This rpm value, below 30% of the maximum allowable number, is needed to ensure that there is enough rotational speed margin to meet the maximum thrust requirements at maximum rotational speed. The pitch of the blades is also altered to achieve this difference in thrust, but the wide range of thrust conditions cannot solely be achieved by pitch variation. The resulting propeller has an efficiency of 81% at the design condition and a solidity of 0.36. The propeller solidity represents how much area of the propeller disk is occupied by the blades. The reference pitch setting at the design condition, defined as the pitch at 70% of the propeller radius, is 66 degrees.
The next step to analyse the propellers is to see whether they can meet the maximum thrust requirement. For controllability in OEI conditions, the thrust-to-weight ratio needed is 1.5 (this requirement is obtained from a controllability analysis performed in the original project, as can be seen in [
3] for reference). With an MTOM of 3025 kg and 12 propellers, this results in a required maximum thrust of 3708 N per propeller. This value includes contingencies: the systems of the Wigeon are sized for an operating empty mass (OEM) 10% higher than the predicted one, to ensure that the design would work in the event that the predicted mass is underestimated, as specified in the original project [
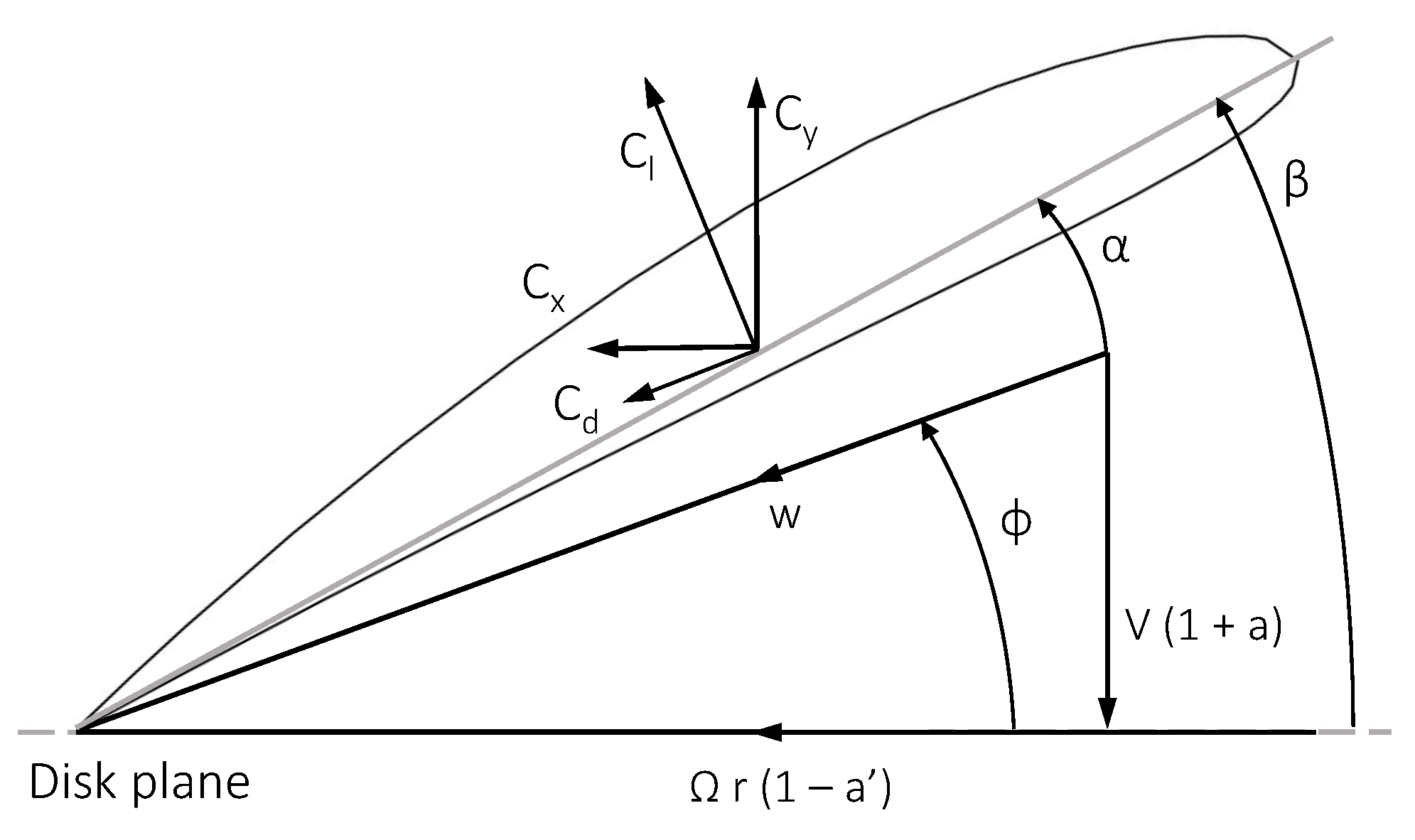
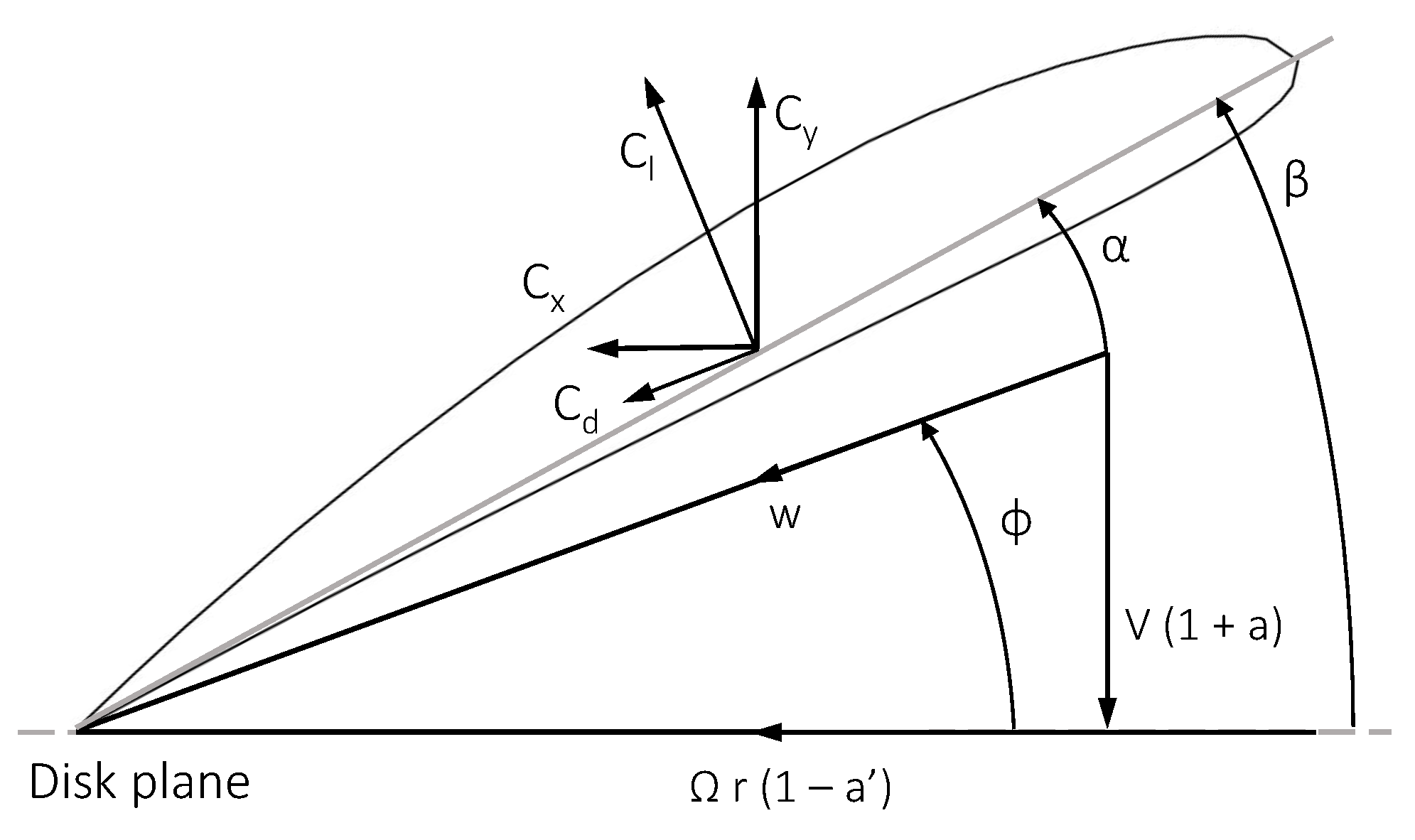
3]. In order to achieve this, the propellers are accelerated up to the maximum rpm (4791), and the blades are pitched down by 45 degrees with respect to the design condition; this means reducing
in
Figure 4. This results in a thrust of 3745 N per propeller. The efficiency of this condition is 39%, a low value which is expected due to the high disk loading, 317 kg/m
, and the low advance ratio, J = 0.12 (at the assumed 10 m/s inflow velocity). These values are obtained at a height of 500 metres, with the corresponding air density, temperature, and dynamic viscosity being obtained from the International Standard Atmosphere. The reason why this height was chosen instead of sea level was to allow for a safety margin and for controllability in higher operations. It is worth noting that the inflow speed for this condition was chosen to be 10 m/s. This is because the analysis method does not work for inflow speeds of 0 m/s. However, with lower inflow speed, the thrust of the propeller increases [
16] due to the increase in the angle of attack of the blades, which means that this is a conservative estimate. Having this conservative estimate for maximum thrust is also good for the design, since some of the effects are not modelled. The assumption of the thrust increasing under static conditions holds unless the propeller blades suffer significant separation under this condition. This cannot be analysed with the current tools, hence verifying the validity of this assumption for the obtained design remains a point of future work for further stages of the design—for example, by performing a numerical simulation at this condition with the obtained geometry from the design framework.
The next step was to analyse the propellers in stable hover. With an MTOM of 3024.8 kg (using contingencies) and 12 propellers, the thrust per propeller required to hover is 2472 N. By accelerating the propeller to 4000 rpm and reducing the pitch angle of the blades by 45 degrees, the necessary thrust was achieved. This was also calculated at a height of 500 metres above sea level. The efficiency at this condition was 41%, and the advance ratio was 0.15.
The last step is the nominal cruise condition analysis as the design point for a higher thrust level. To achieve the cruise thrust of 154 N, the pitch was kept at the design condition and the rpm of the propeller was reduced to 1090 rpm, resulting in a cruise thrust per propeller of 158 N. At this condition, the efficiency was 77%, four points lower than under the design condition and the advance ratio was 3.2.
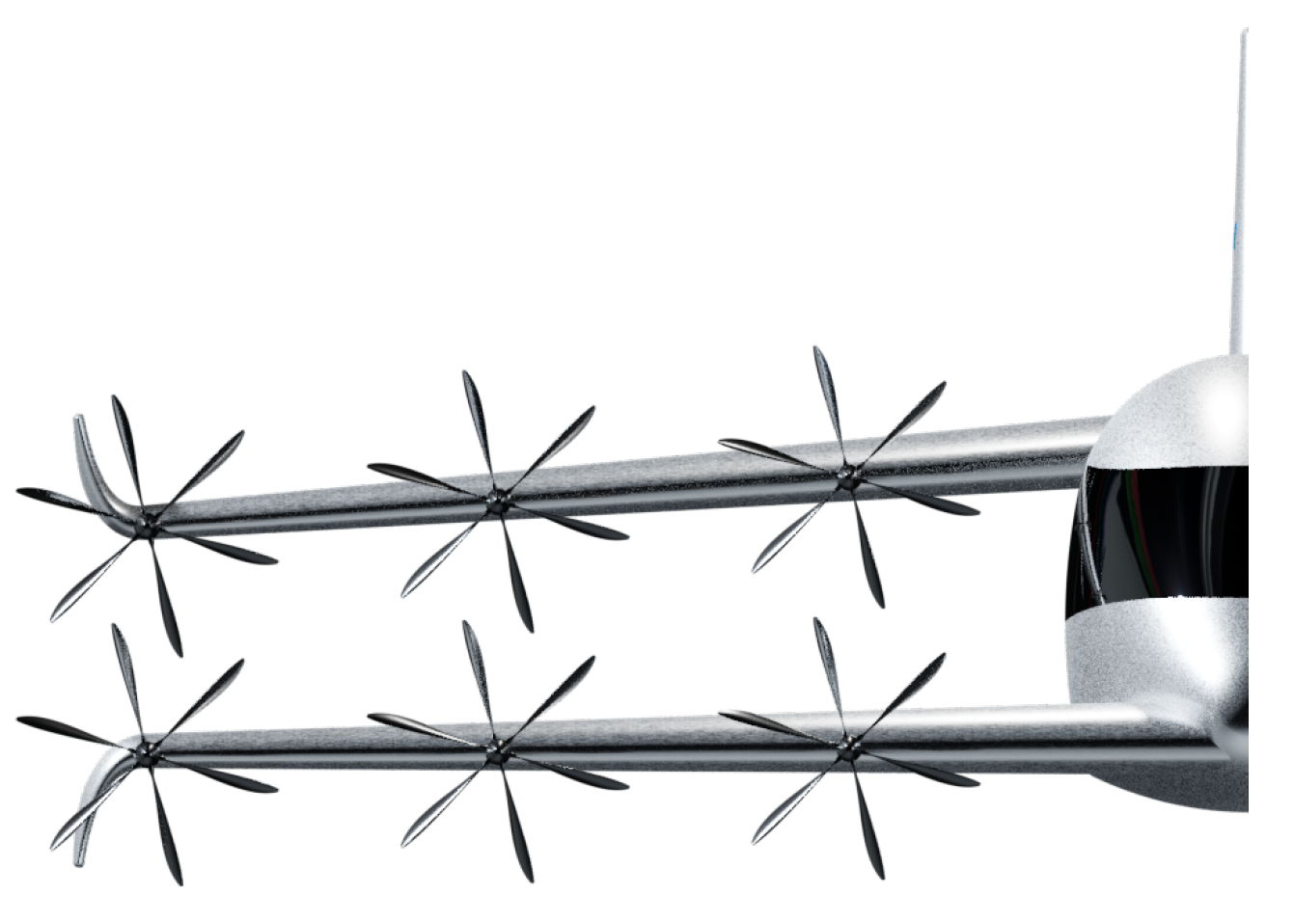
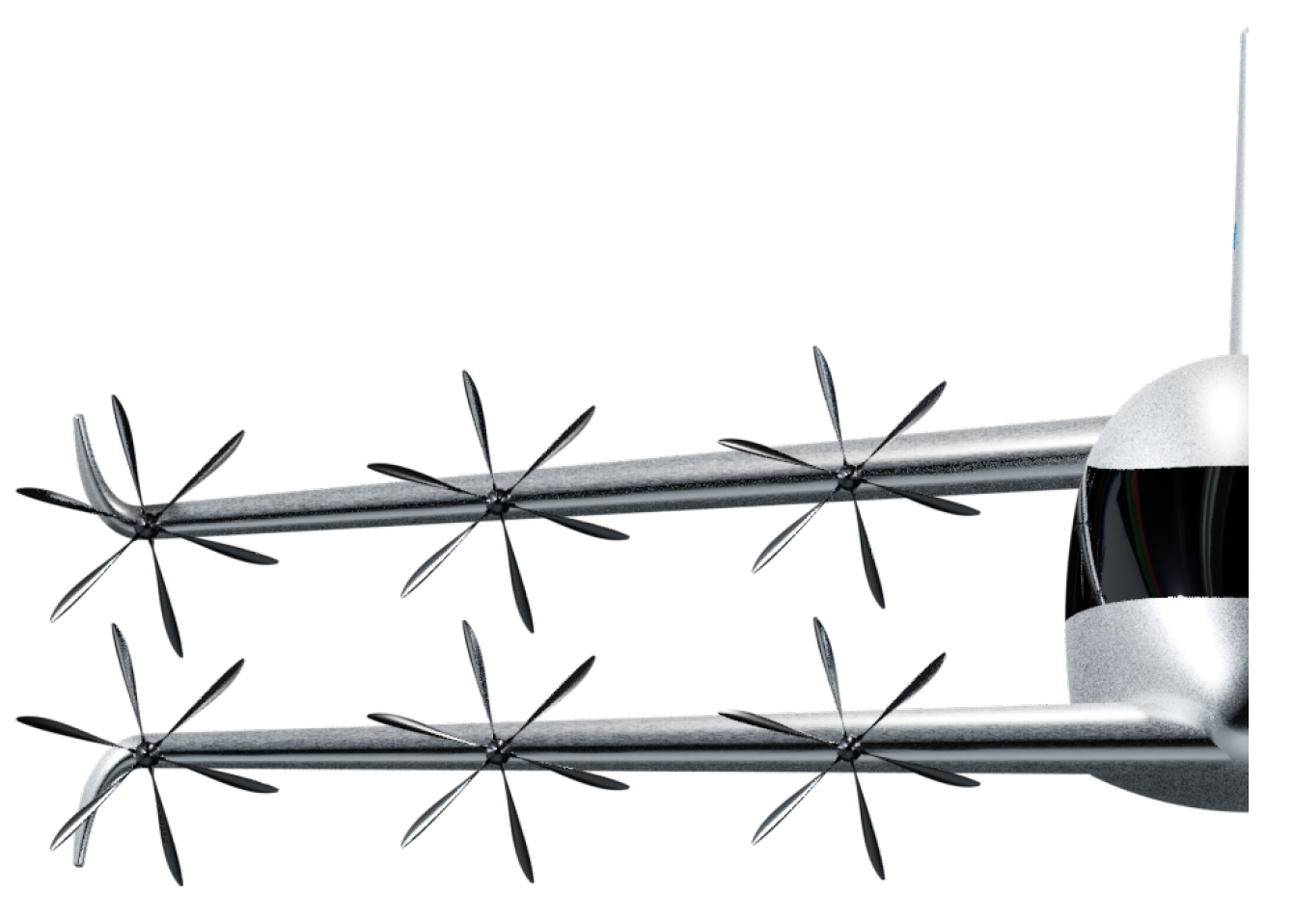
The positioning of the propellers is shown in
Figure 9. As can be seen, the overlap between the front and back propellers was minimised with the chosen number of propellers and their size to prevent the noise and performance penalties that slipstream ingestion brings. Note that the position of the wings stems not only from this consideration, but also from further aerodynamic considerations detailed in the original project [
3].
3.1. Noise Analysis Results
Under cruise conditions, the reference noise level
L1 for the Wigeon was determined to be 107 dB. The tip Mach number for the Wigeon is slightly below 0.3, for which
CMach is −19 dB. Using Equation (
12) with these values, the noise from one propeller during cruise at 100 m from the aircraft was determined to be 65.06 dB. The 100 m distance was chosen as a sample distance to evaluate the noise. Similarly, for 1000 m, the noise representing the cruise height is 45.03 dB. For the 12 propellers combined, the noise levels at 100 m and 1000 m are 75.85 dB and 55.83 dB, respectively. The semi-empirical method used was not developed for highly loaded propellers under hovering conditions, and as such, only cruise estimates were presented here. Since hovering is a critical part of the noise performance of eVTOLs, this remains an important point for future work, as mentioned in
Section 3.3.
3.2. Sensitivity Analysis
In order to see the effects of the input parameters on the results of the propeller design and analysis, a sensitivity analysis was performed.
3.2.1. Sensitivity of the Design Procedure
The first part of the sensitivity analysis concerns the blade design procedure explained in
Section 2.1. For this procedure, the sensitivity analysis was divided into two parts: one concerning the inputs that are not a design choice (freestream velocity which comes from the flight performance analysis performed in the original project [
3], and the propeller radius, which is bounded by the procedure laid down in
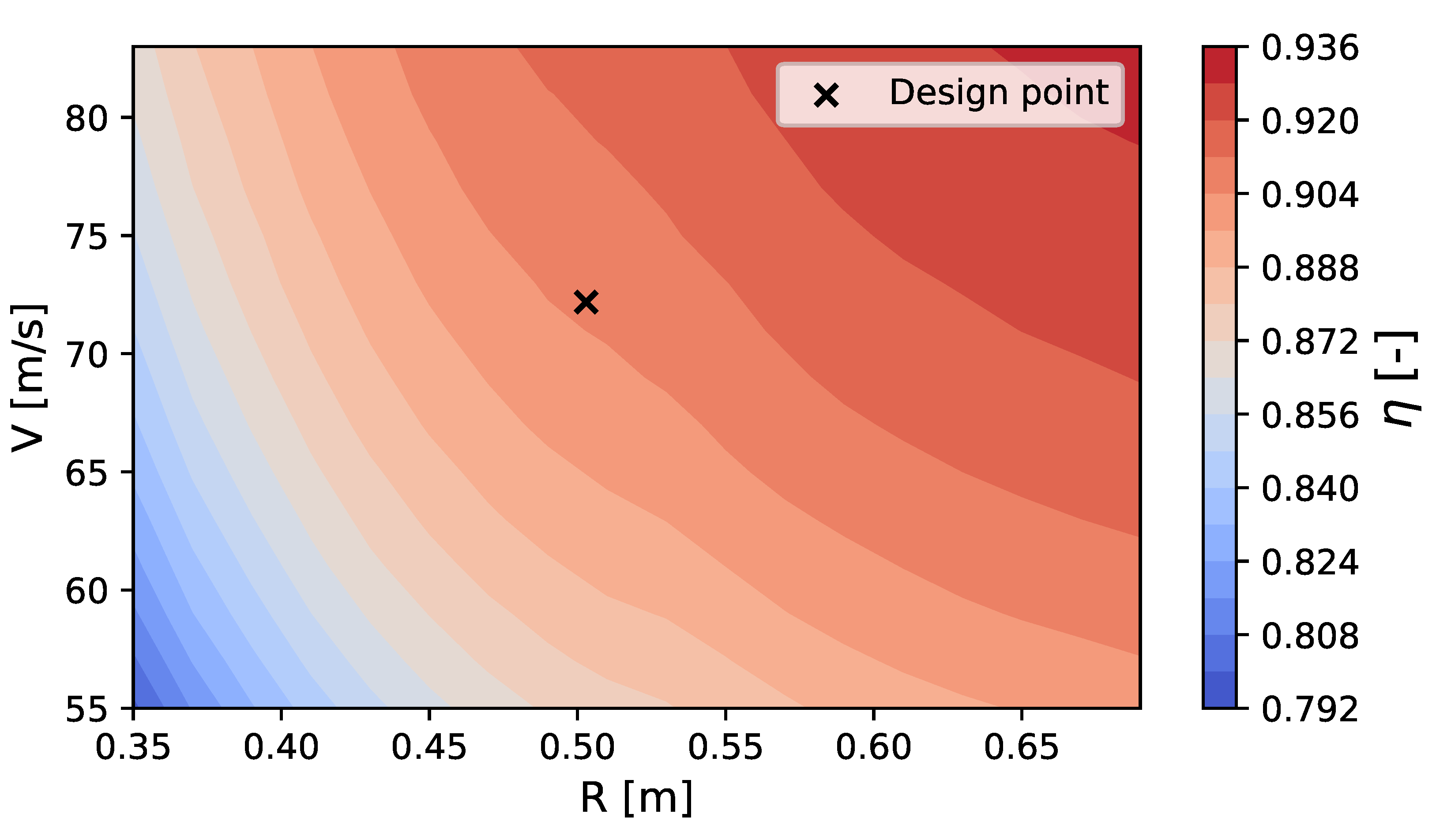
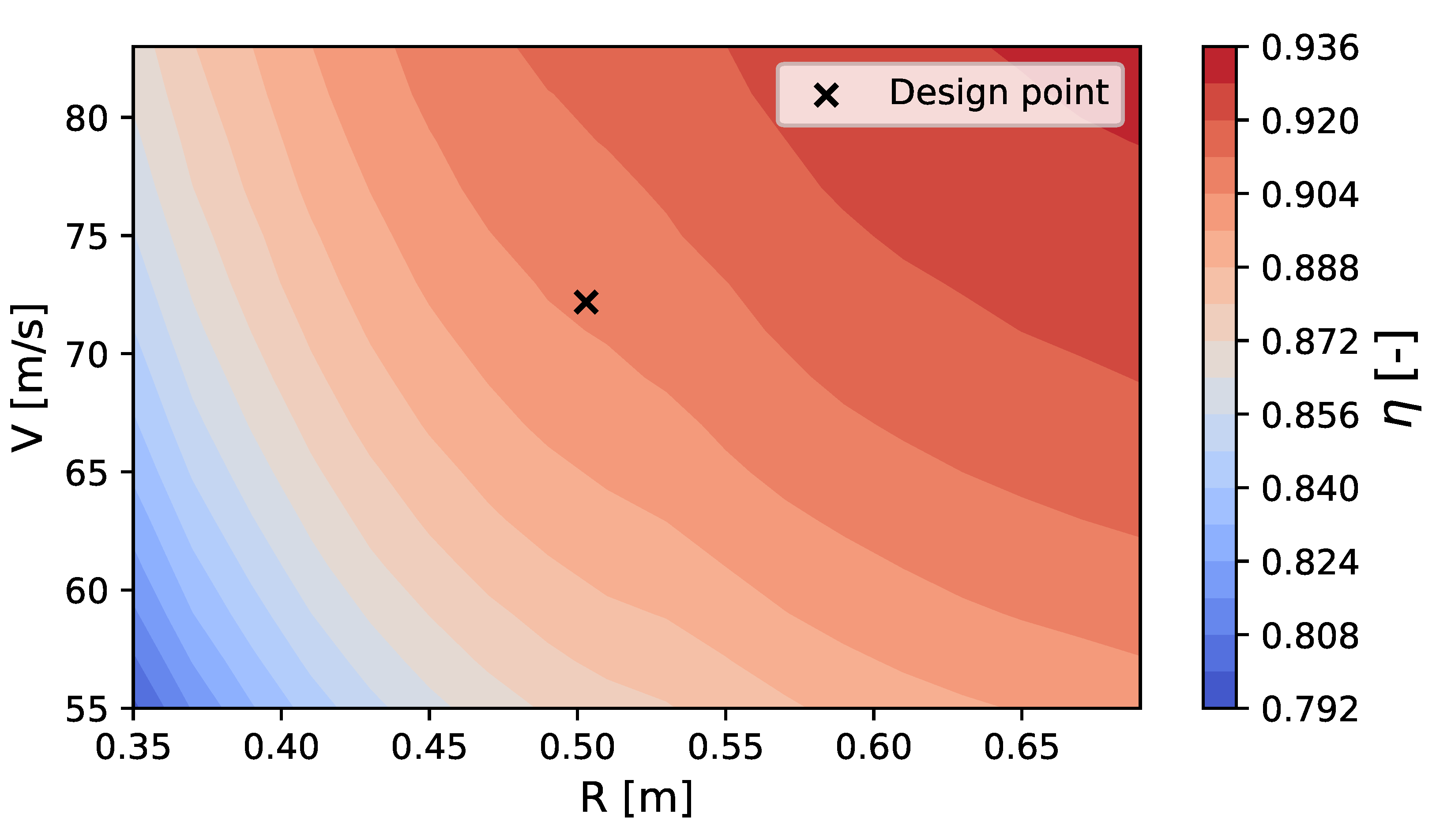
Section 2.2); and one concerning the design variables that can be freely chosen while designing the propeller (propeller rpm and number of blades). Since the goal of the procedure is to maximise efficiency at a given thrust setting, the parameter of interest is the efficiency of the propeller. The results of this sensitivity analysis can be seen in
Figure 10 and
Figure 11.
From
Figure 10, it can be seen that a higher radius increases efficiency, which is expected as it decreases disk loading. This leads to the design goal of maximising the radius of the propellers. The design point for the cruise speed
V, since it is selected based on requirements of the mission design in the original project [
3], and is affected by other design disciplines, could not be chosen during the design process of the propellers, but it is still important to analyse the effect that it has on propeller performance. The graph includes the final design point for cruising conditions.
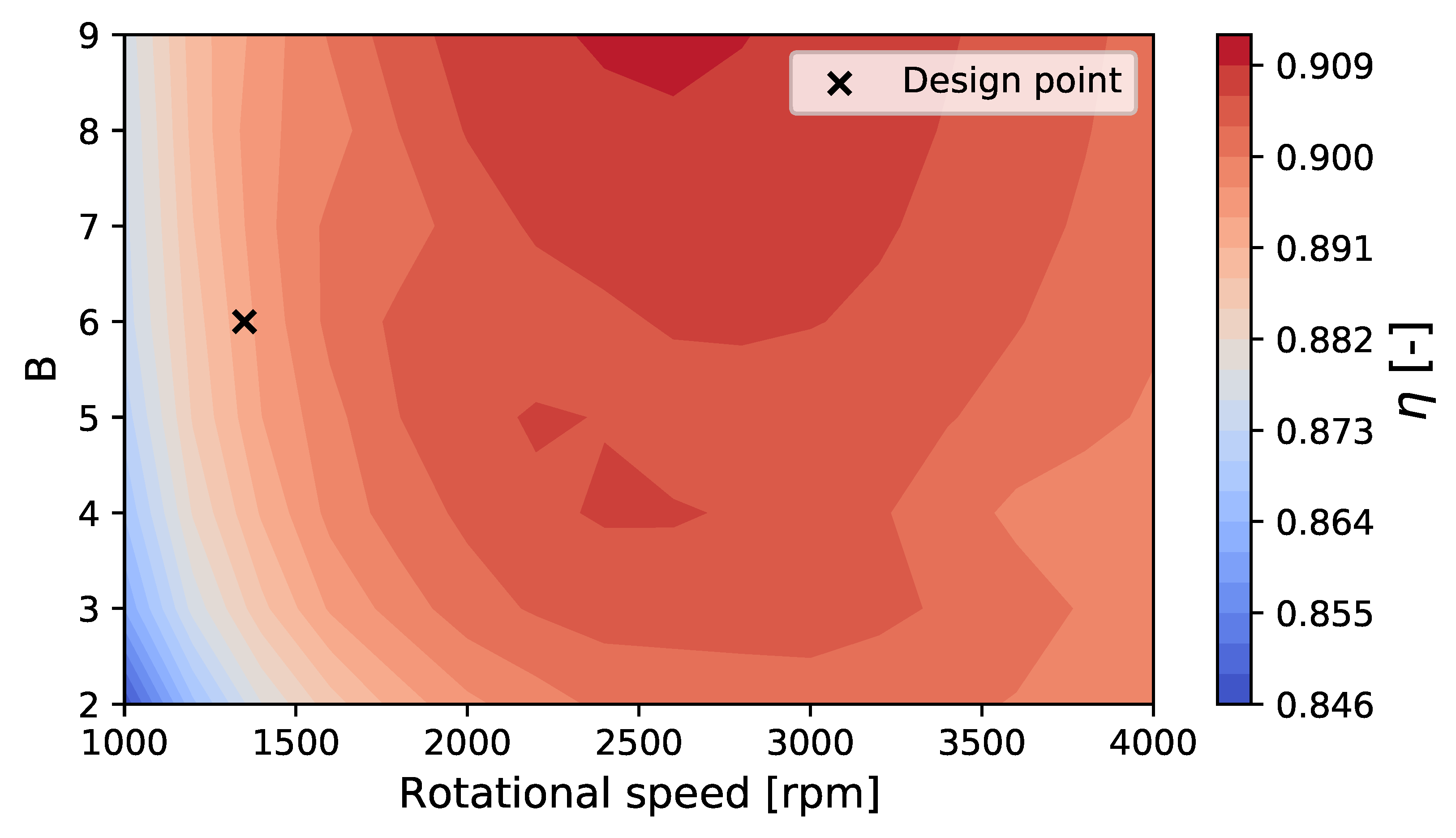
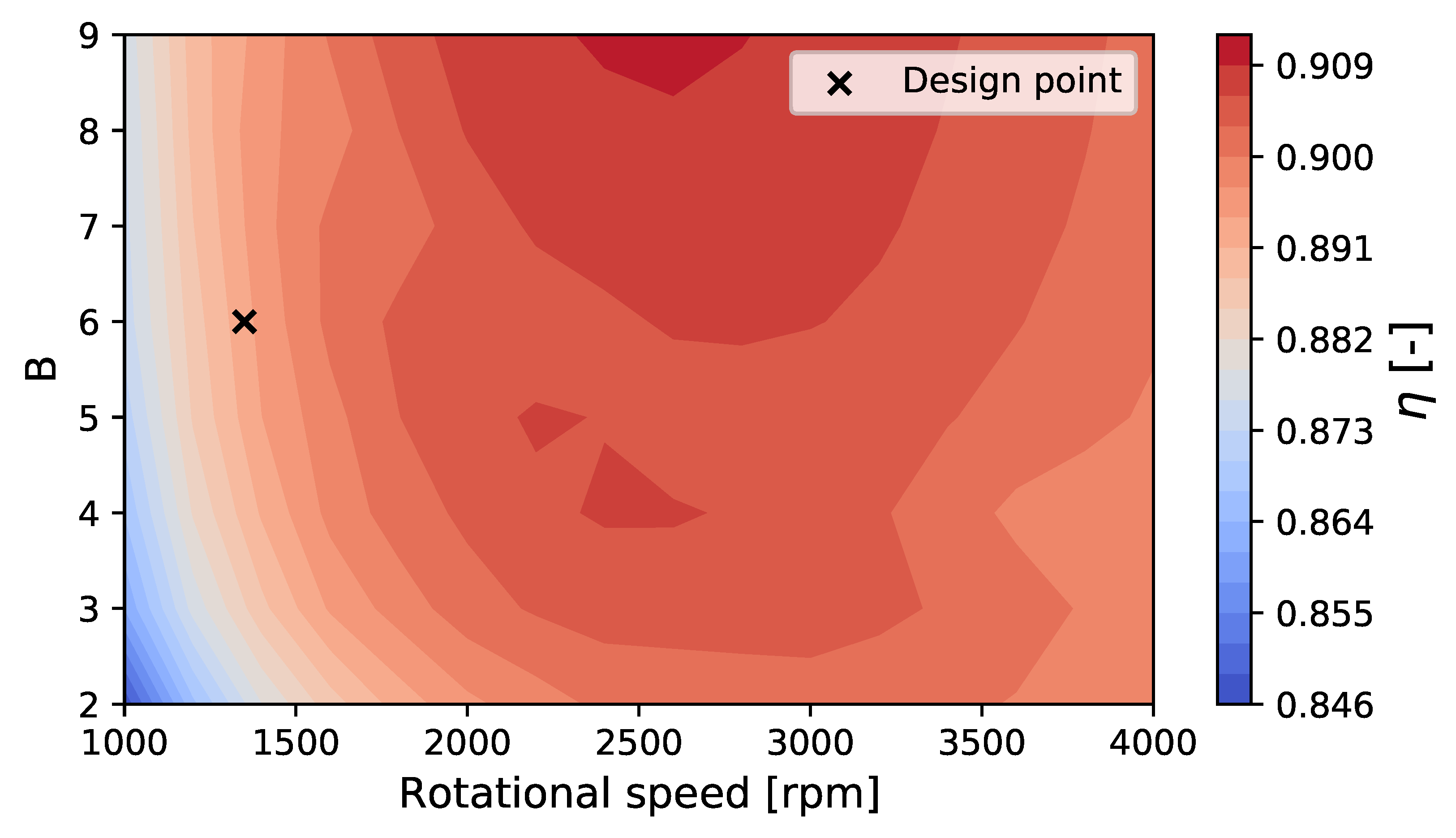
From
Figure 11, it can be seen that more blades mean more efficiency, which partly explains the reasoning behind the selected number of blades, as explained in
Section 3. The increase in efficiency is due to an increase in the induced efficiency of the blades [
6]. However, with the method shown in
Section 2.1, the total solidity of the propeller remains nearly constant independently of the selected number of blades, which results in blades with a lower chord length for a higher number of blades, which results in a decrease in profile efficiency due to the lower Reynolds number of the blade [
6]. Overall, the effect of the number of blades on the final result is not very high, especially close to the design point. For the rotational speed, the design value chosen was below the optimal one. The reason for this is that the thrust needed for cruising is very low compared to the maximum thrust required, and this last value needs to be achieved at a rotational speed of at most 4790 rpm, and thus this margin is needed.
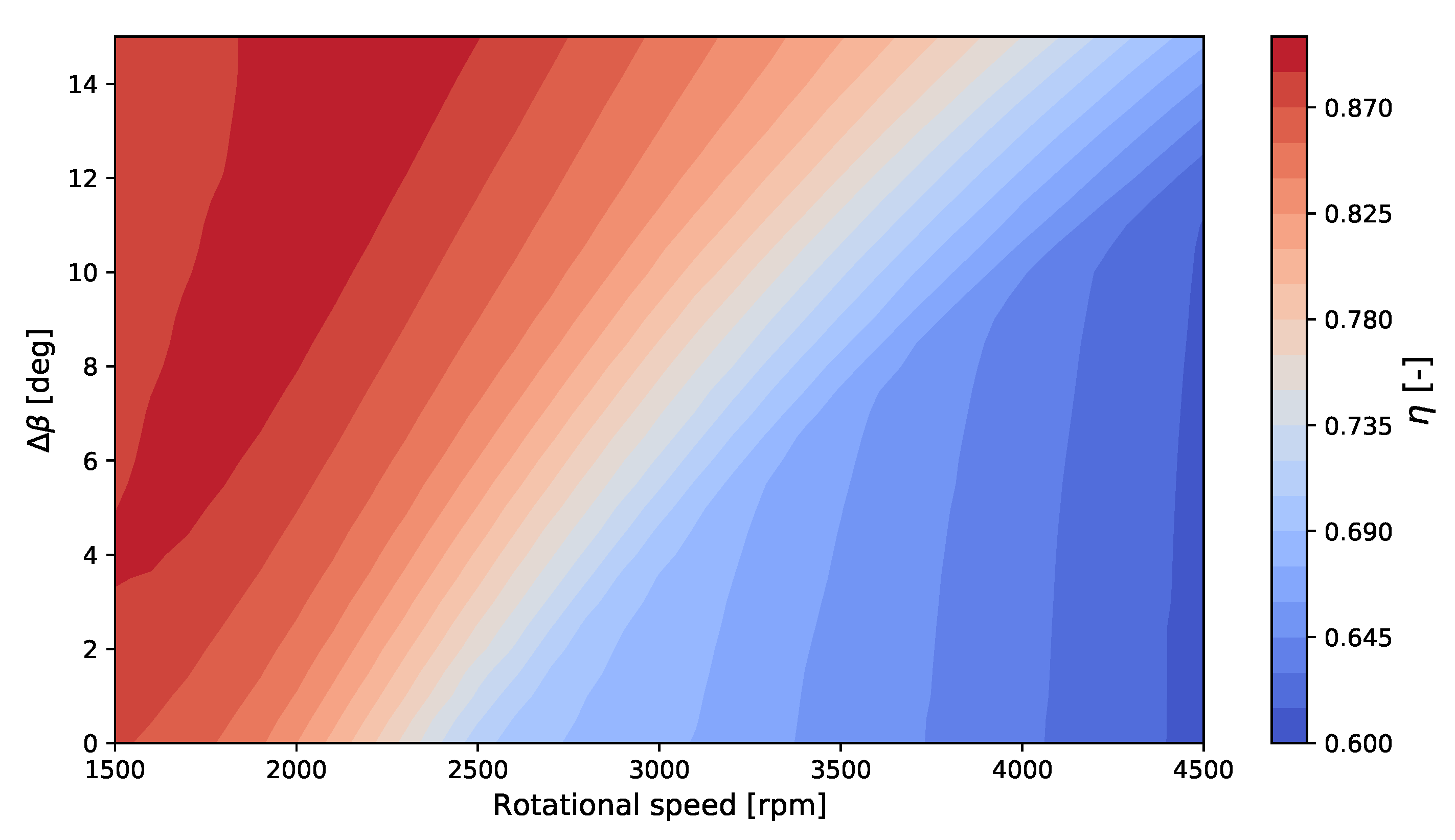
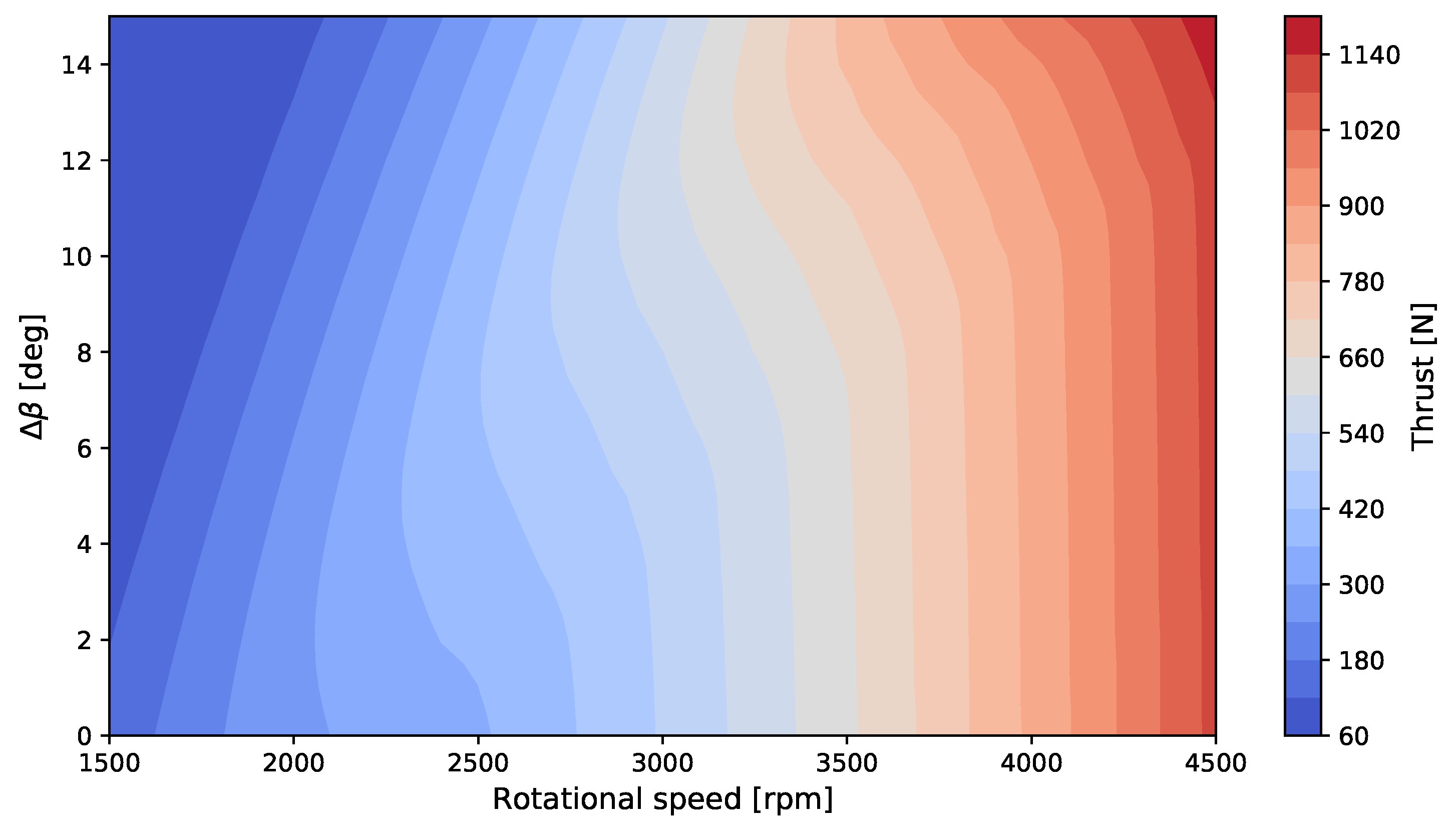
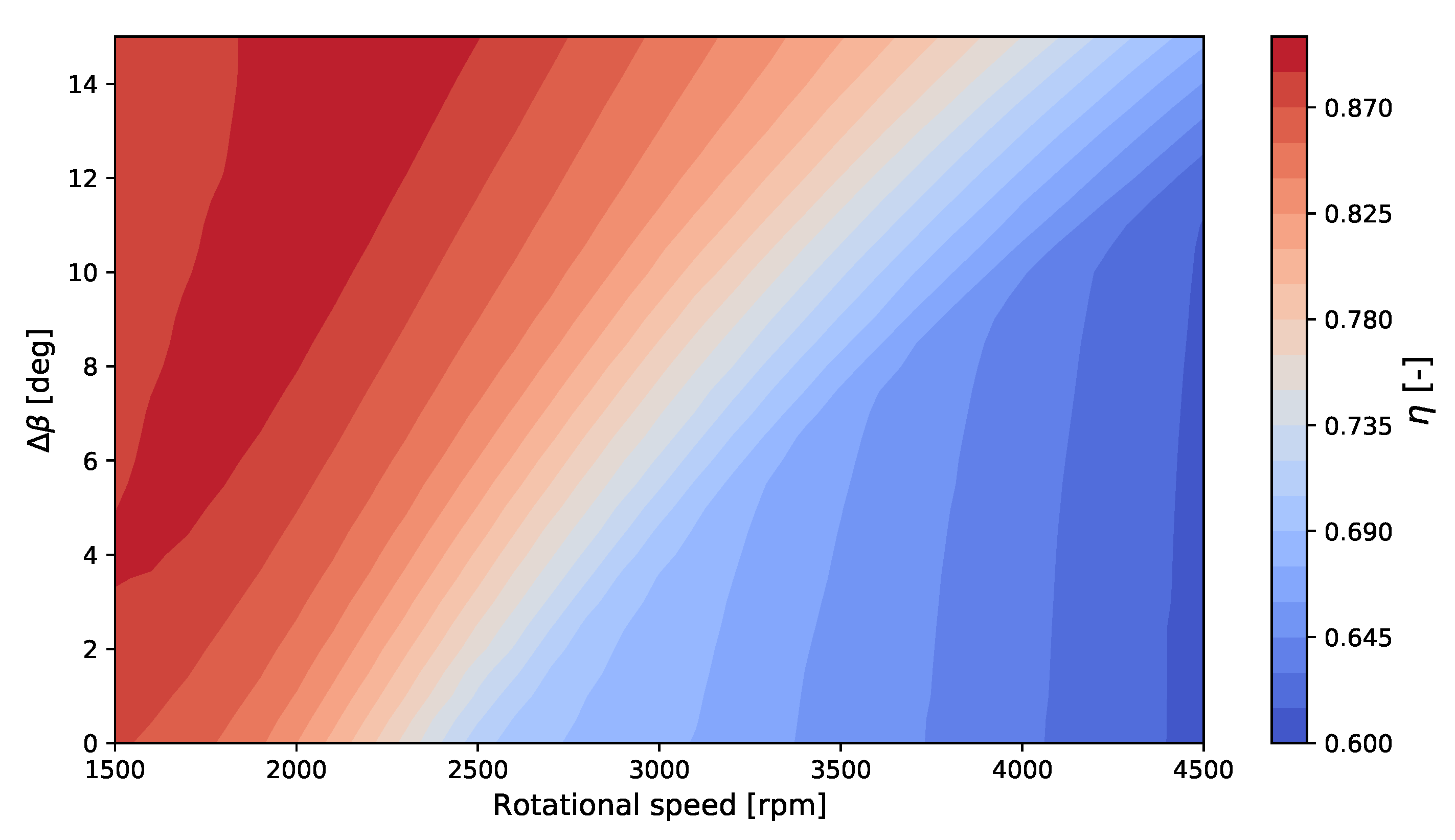
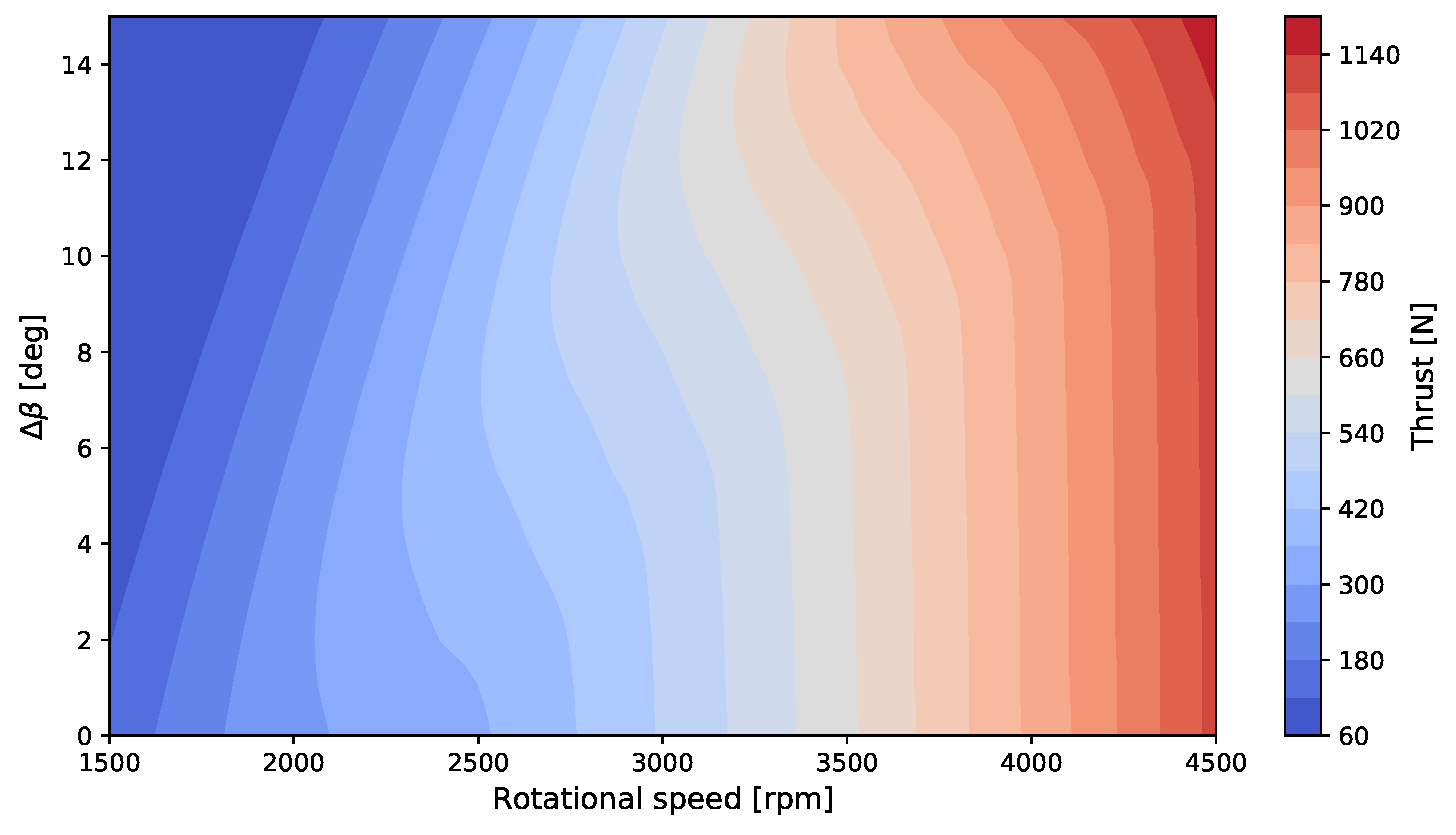
3.2.2. Sensitivity of the Propeller Analysis
The second part of the analysis concerns the procedure to analyse the propeller under off-design conditions. For this part, the sensitivity analysis was conducted for both the effect on propeller efficiency, shown in
Figure 12, and on thrust, shown in
Figure 13. These sensitivity analyses show the change in thrust and efficiency with a change in rpm and blade pitch. There is no design point included because this analysis is used to evaluate the performance under arbitrary conditions, not under the design ones. It can be seen that with an increase in rpm, the thrust increases, and thus the efficiency also decreases due to the higher disk loading, as expected. For changes in pitch, the results are no longer linear, because a change in pitch results in a change in the angle of attack of the blade, and thus the lift and drag coefficients, which in turn have an effect on the induction factors
a and
a′. These factors affect the velocity seen by the blade, which thus affects the flow angle
, and as a result, the aforementioned parameters are affected again. As a result, in order to obtain the best performance when selecting a change in pitch and rpm to meet the thrust requirements in the hover and maximum thrust conditions (
Section 3), the performance of the propeller is computed over a wide range of pitch angles, after which the best is selected.
3.3. Future Recommendations on the Propulsion Design
The proposed design methodology was intended as a preliminary design tool, and as such, several assumptions were made. While some of them were necessary to keep the method simple and sufficiently fast, there are points on the methodology which warrant further research.
Stall of blade sections: The aerodynamic data for the airfoil was computed in XFOIL, which loses accuracy in the post stall region of the lift polar. Since parts of the blades might be stalled during operation due to the wide range of operating conditions, it is important to ensure that the post-stall aerodynamic data of the airfoil is available and accurate. This is one of the points where the procedure needs improvement, and next steps could for example include the CFD simulations of the airfoil to obtain more accurate post-stall data.
Blade design method: The method used to design the blade geometry is not robust when the propellers are too highly loaded, where the iterative blade design procedure given in
Section 2.1 can fail to converge. The momentum theory approximation that assumes that the increase in flow velocity with respect to the freestream velocity at the disk plane is half the total increase at the wake is not always accurate and can result in convergence issues [
5]. Propellers with the moderate-to-high disk loading adopted for the Wigeon (317 kg/m
) can still be designed with this method, but a different approach would be needed if the chosen architecture features very highly loaded propellers or fans.
Effects of interactions: Due to the complexity of their analysis, the effects of propeller–wing and propeller–propeller interaction were not modelled in the present study. Since these interactions can have an effect on propeller performance, quantifying them is important for a more accurate design. For the Wigeon, a propeller lateral separation of 0.3 m was chosen, which corresponds to 30% of the radius. A study by de Vries et al. shows that, in horizontal flight, a distributed propulsion system using open rotors sees a drop in propeller efficiency of 1.5% for a separation between propeller tips of 2% of the propeller diameter [
8]. In a different study carried out by Zhou et al., it was shown that the thrust coefficient of two propellers with a tip separation of 5% of the propeller diameter is within 2% of that of a single propeller under static thrust conditions, although a significant increase in thrust fluctuation is seen [
9]. Zhou et al. also showed that an increase in noise was observed with decreasing separation [
9]. Based on the results from these studies, it is expected that the interaction effects will not cause significant deviation from the predicted performance with the chosen clearance; however, the sensitivity analysis on the effect of this clearance could not be performed with the available tools. In transition, these effects can be more significant [
7]. Another effect of propeller–propeller interaction is slipstream ingestion in the second row of propellers, located in the aft wing, and not considered in the present study. Quantifying this interaction is important because it can lead to more significant losses in the calculated thrust [
7], while yet negatively affecting noise. Finally, the effect of the propeller blockage due to the wing was not modelled, which can also affect propeller performance, while also affecting the positioning of the propellers with respect to the wing in terms of height and depth.
Airfoil selection: For the present study, a NACA4412 airfoil was assumed, but improved airfoil selection and optimisation were expected in further stages of the design. An early airfoil selection that is more tailored to the configuration and mission of the aircraft to be analysed could already be considered in the preliminary design.
Aeroacoustic simulation: The noise analysis presented herein was based on a semi-empirical method which might not be accurate for the Wigeon configuration, especially considering the propeller–wing, propeller–propeller, and wing–wing interactions. Hence, the next design phases should move towards more accurate aeroacoustic simulations of the aircraft based on the geometry obtained from the preliminary design.
The verification of the implementation of the numerical methods was included in [
3], in which the outputs from the blade design method were compared against actuator disk theory and against expected trends for the efficiency with a varying advance ratio. The output from the presented design framework allows one to build relatively accurate CAD models of the propellers which can then be used in numerical simulations to analyse the more complex phenomena which have not been included in the preliminary design and which can be used to assess the performance of specific designs obtained from the presented method.
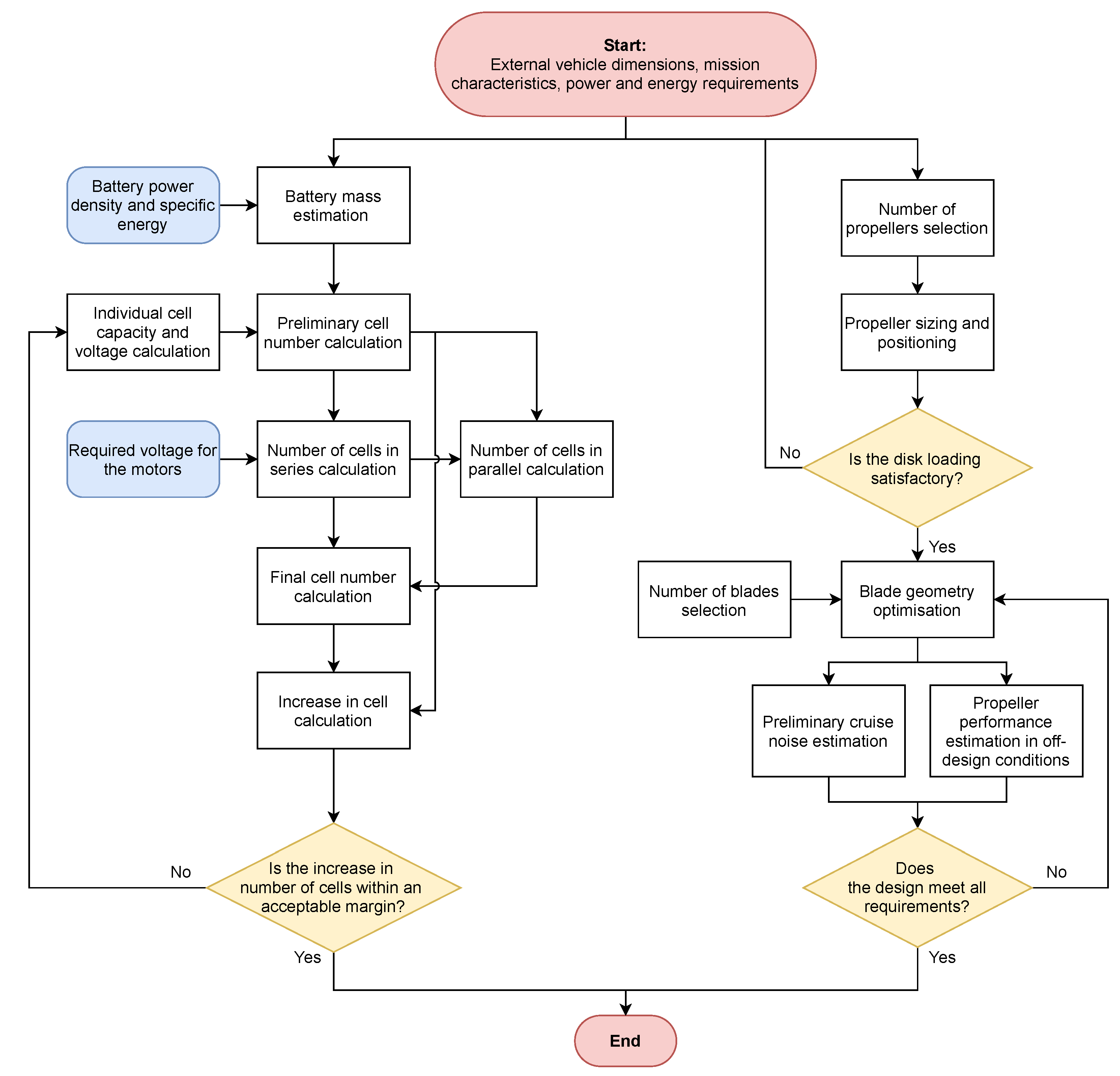
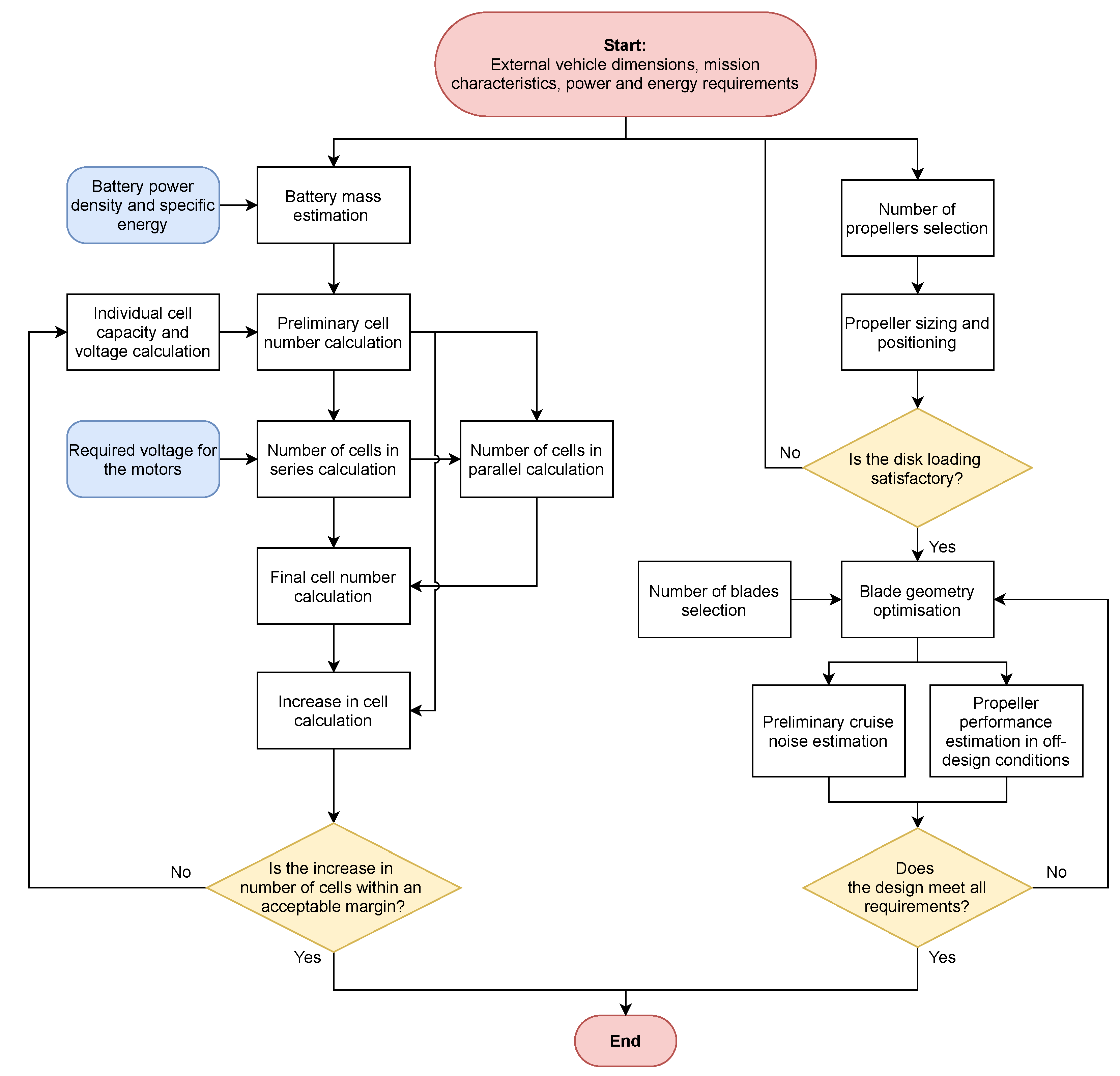
4. Power System Design Methodology
The goals of the preliminary power system design are to obtain a mass estimate for the power system and to develop an initial configuration for the batteries.
The method described herein is based on the required maximum power and required total energy. The inputs used to obtain the results mentioned in
Section 5 come from [
3], which is the original project for which the present methodology was developed. The following inputs are taken into account: the required energy stored, the required maximum power provided, the properties of individual battery cells, the division of battery cells for the motors and other systems, and redundancy.
4.1. Mass and Weight Calculations
The following formulae give the mass of the battery package, based on the required energy (Equation (
14)) and maximum power (Equation (
15)); where DoD stands for depth of discharge and EOLC stands for end-of-life capacity, both having a value between 0 and 1:
The mass of the final battery was the larger of the two values calculated with Equations (
14) and (
15). The volume of the battery can then be determined with Equation (
16):
where
is the specific energy in Wh/kg and
is the volumetric energy density in Wh/m
3.
After determining the mass and volume of the battery pack, the next step is to obtain the masses for the other parts of the powertrain. The two parts that are considered in the preliminary design are the motor controllers and the electric motors. This is done by multiplying the maximum power by the combined specific power of the motor controllers and the electric motors. This combined specific power is calculated with Equation (
17):
4.2. Battery Configuration
Not only is the size of the battery important for the design, but so are the specifications in terms of configuration. A battery consists of a number of battery cells. The number of cells depends on the properties of the individual cells and the required properties of the total battery.
Some parameters other than total battery size play a role in the preliminary design of the batteries, of which safety and ease of work are used in the preliminary design phase. A method that is considered to increase the safety consists of adding two motor controllers per motor, instead of one, allowing a redundant construction. However, duplicated motor controllers would result in a significant weight penalty given that each controller weighs approximately 11 kg based on the power density of [
17], thus resulting in a total weight increase of approximately 130 kg. In addition to this, the Wigeon eVTOL was designed to withstand a single motor failure, and thus the weight penalty was viewed as too high to accept additional redundancies. The original analysis for the OEI condition can be found in [
3].
Therefore, the main strategy adopted to achieve the safety of the power system for the present design consists of limiting the impact of battery failure. By having two batteries per electric motor, such redundancy can be achieved, such that in the case of a battery failure, the affected motor still has half of the original energy at its disposal. By assuming that all the battery packs are equal, a modular design can be achieved, making the aircraft easier to manufacture and maintain. The aircraft has an additional, dedicated battery for the non-propulsive parts of the power system, but this battery is not the focus of the preliminary design methodology presented herein.
There are two ways of connecting batteries: in series or in parallel. Batteries connected in series have the same current, and the total voltage of batteries in series is the sum of their individual voltages, represented by Equation (
18). Batteries connected in parallel, on the other hand, experience the same voltage and the total current is the sum of their individual currents.
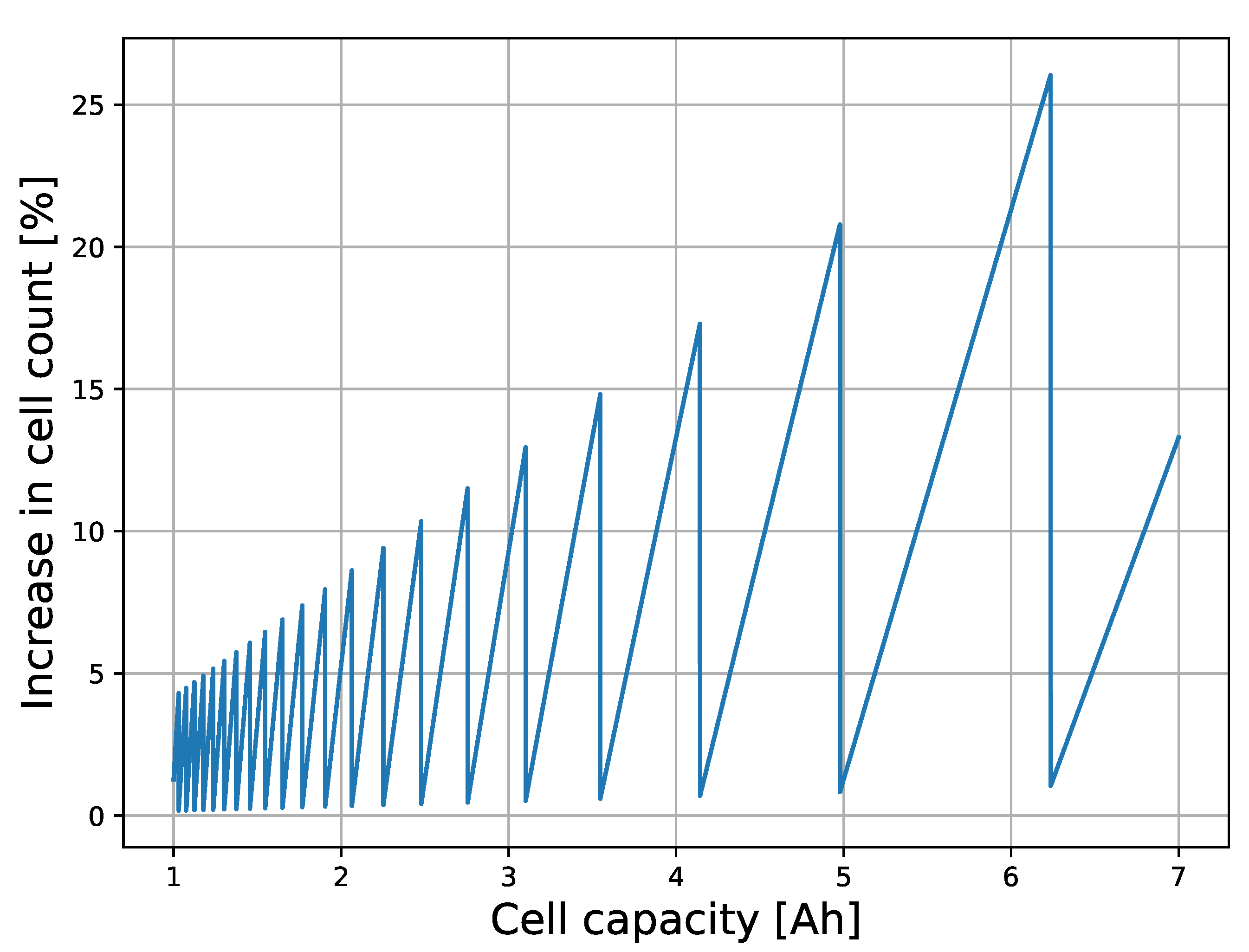
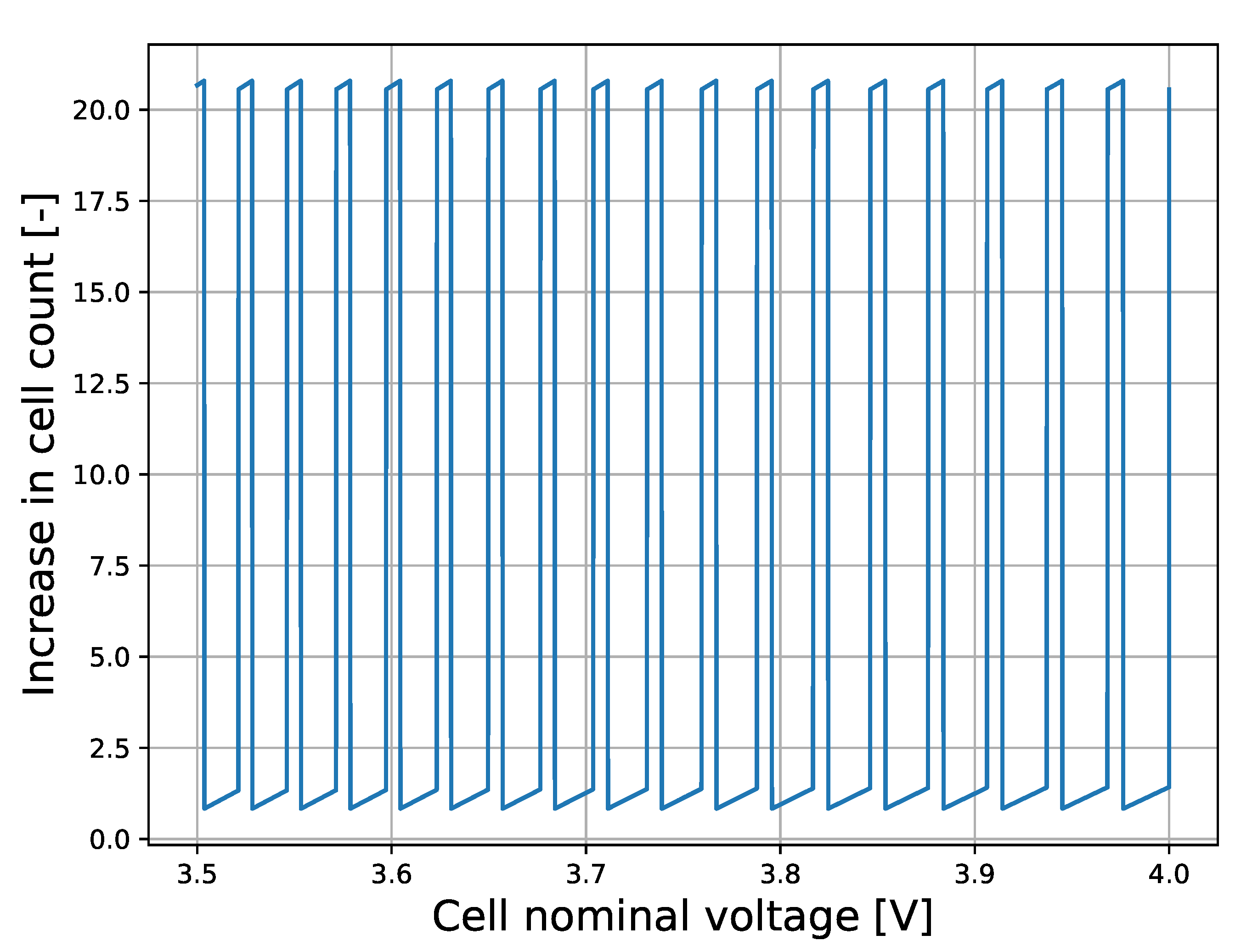
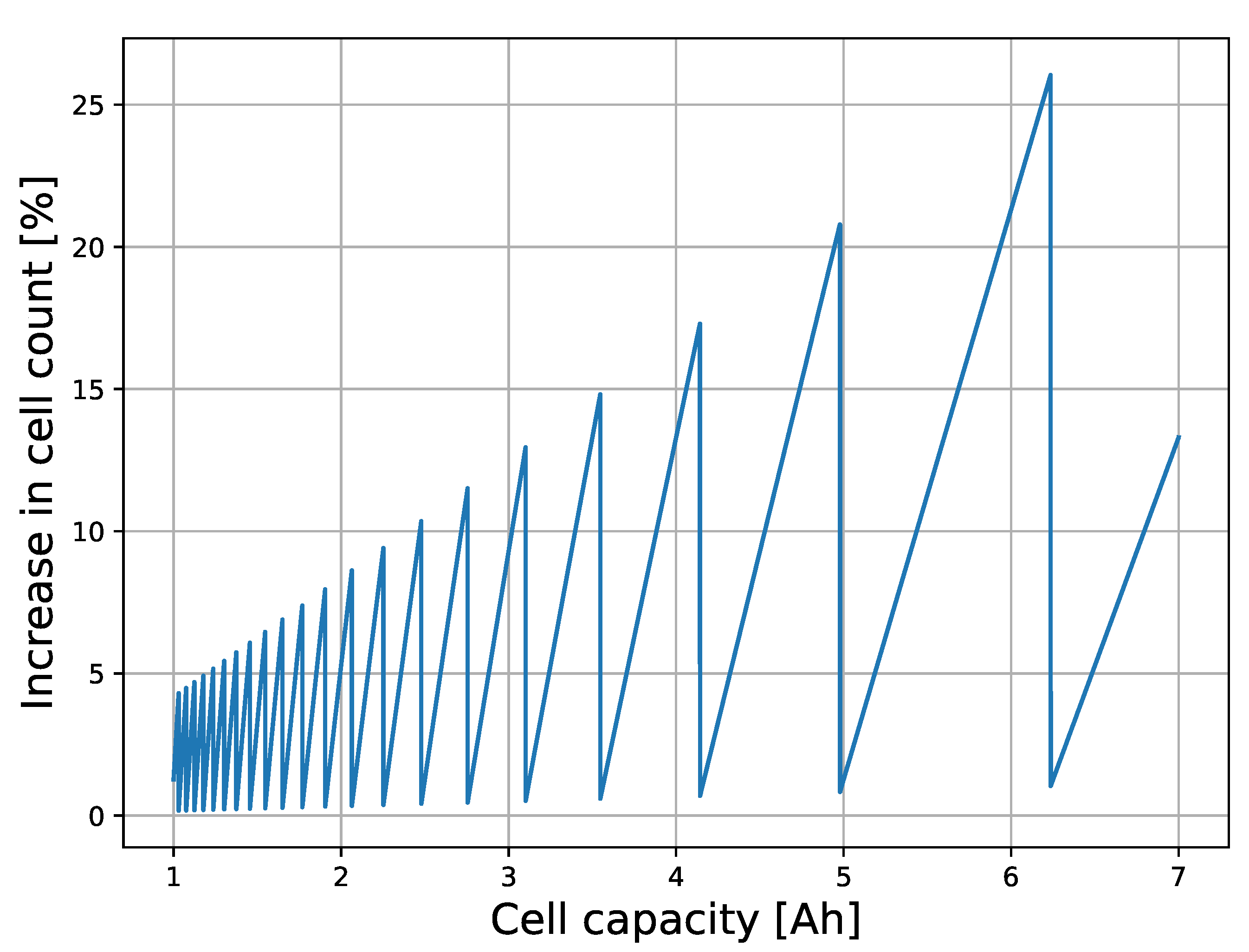
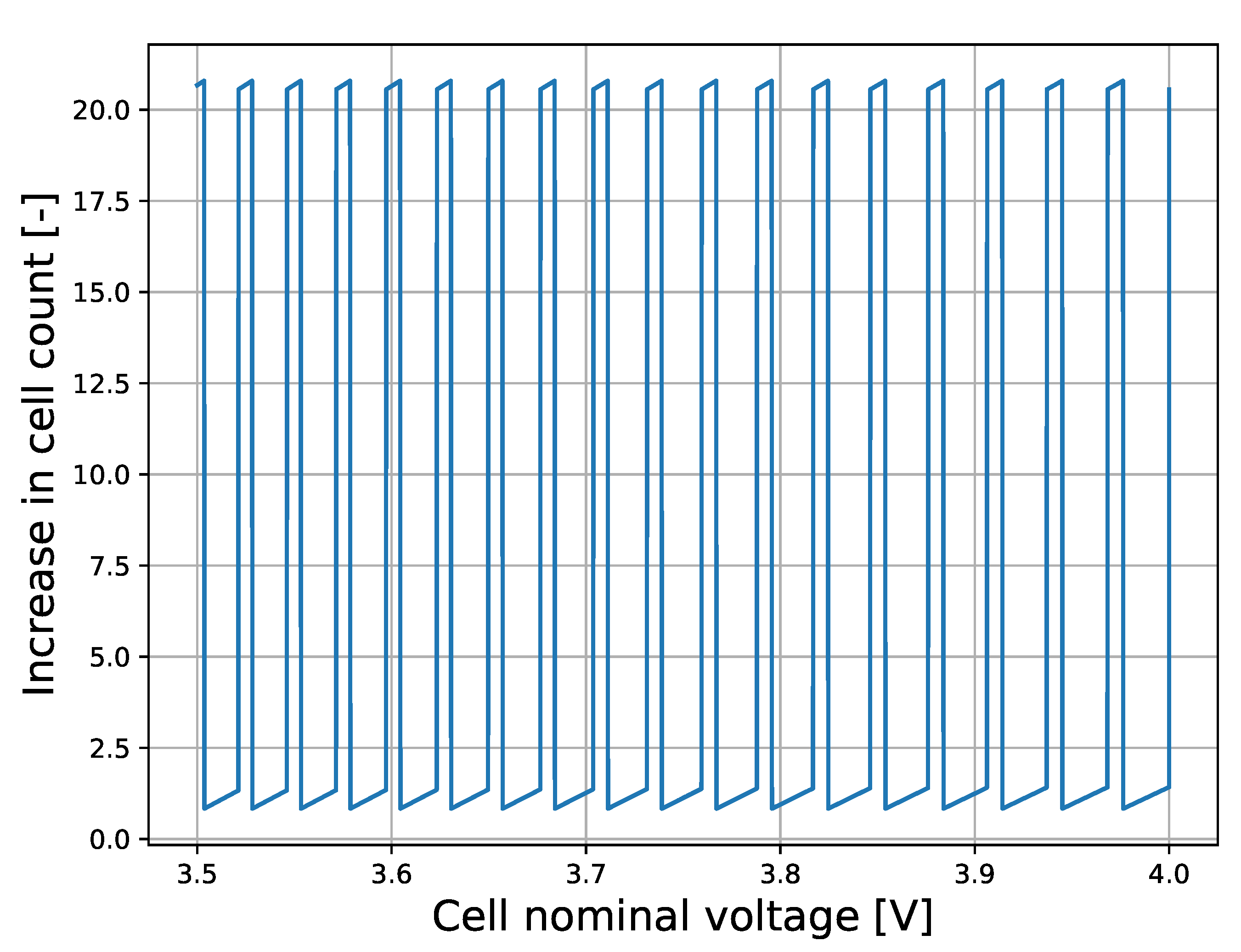
Equation (
19) gives the total energy
E stored in a single battery cell. This is found by multiplying the capacity
C and the nominal cell voltage
V. The values for
C and
V have a major influence on the relative increase in the number of cells. This effect is described in more detail in
Section 5.4. The values for
C and
V were chosen to minimise this increase:
Equation (
20) was used to calculate the number of cells required for the electric motors only based on the required energy for the propulsion system. Equation (
21) is used to calculate the number of cells for the remaining batteries. These values have to be rounded up to the next integer:
where
is the number of cells, %
is the percentage of energy that goes into the motors and
is the energy stored in a single cell. These two are separated as a consequence of the battery configuration, since both the propulsive and non-propulsive power storages need to have an integer number of cells.
The initial number of cells from Equation (
20) does not take into account the fact that a battery not only needs to provide energy, but also the correct voltage. The number of cells in series is determined by the required voltage for the electric motors, and can be found by rewriting Equation (
18) into Equation (
22). Dividing the total number of cells from Equation (
20) by the number of cells in series gives the number of cells in parallel, as stated in Equation (
23):
Since both the number of cells in parallel and in series are increased due to rounding, the total number of cells has increased. The new total number of battery cells of the power system can then be calculated using Equation (
24). The percentage increase in battery cells with respect to the original number from Equation (
20) can be calculated using Equation (
25):
Until this point, all calculations have been solely dependent on the total required energy. From here onwards, however, the required number of modules for the battery will take a leading role. However, the power system is being designed for a tandem-wing eVTOL aircraft with distributed propulsion and two batteries per motor to increase reliability. To ensure modularity, which is convenient for manufacturing and maintenance, it is required that all batteries have the same number of cells in parallel. This means that the number of cells in parallel has to be scaled up to the nearest number that is a multiple of the total number of individual batteries. This way, each battery has the same number of cells in parallel, therefore, they all have the same construction. This allows the batteries to be easily replaced, as all battery packs are identical.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}