
Adaptive Predictive Functional Control of X-Y Pedestal for LEO Satellite Tracking Using Laguerre Functions



Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
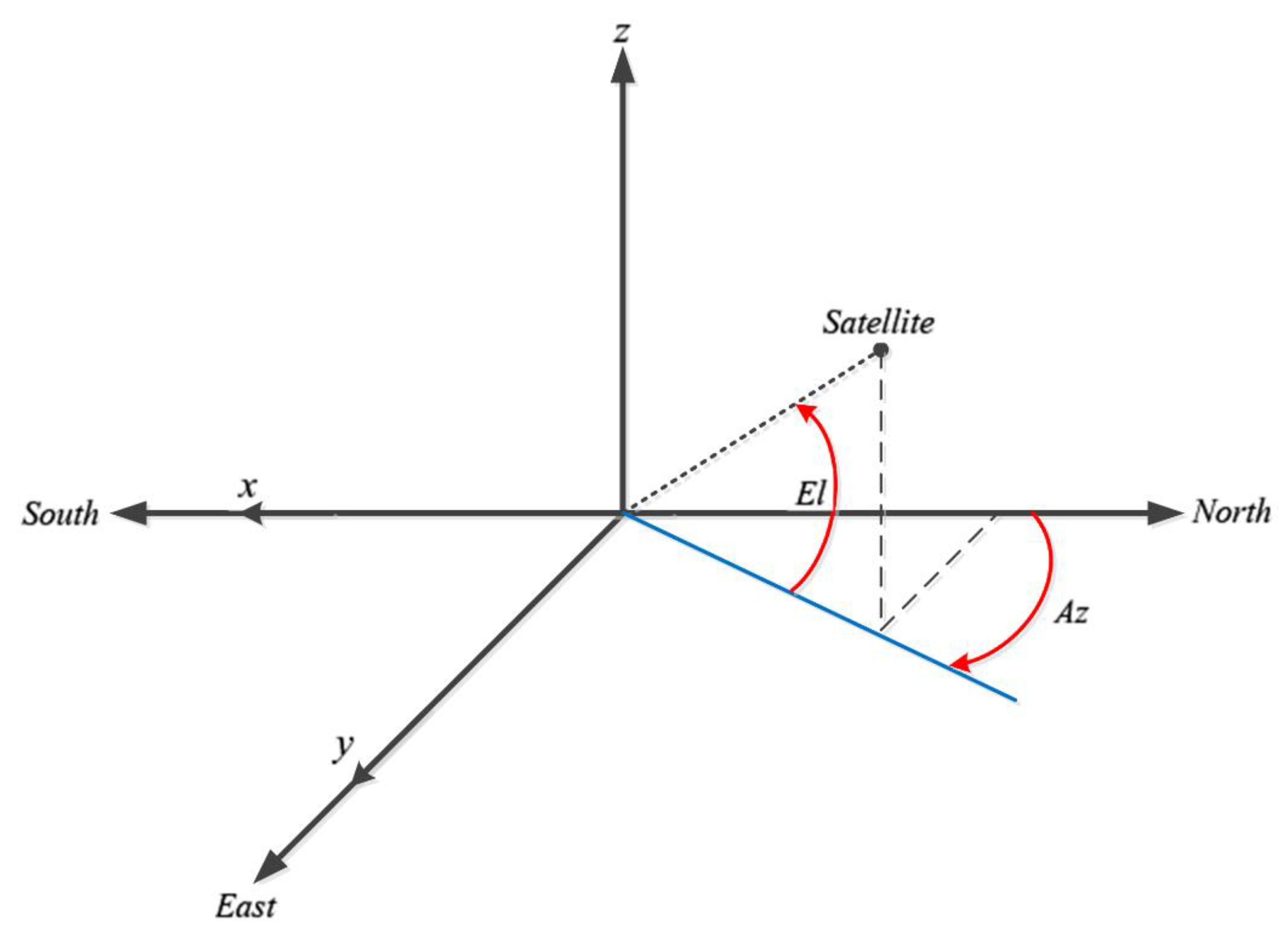
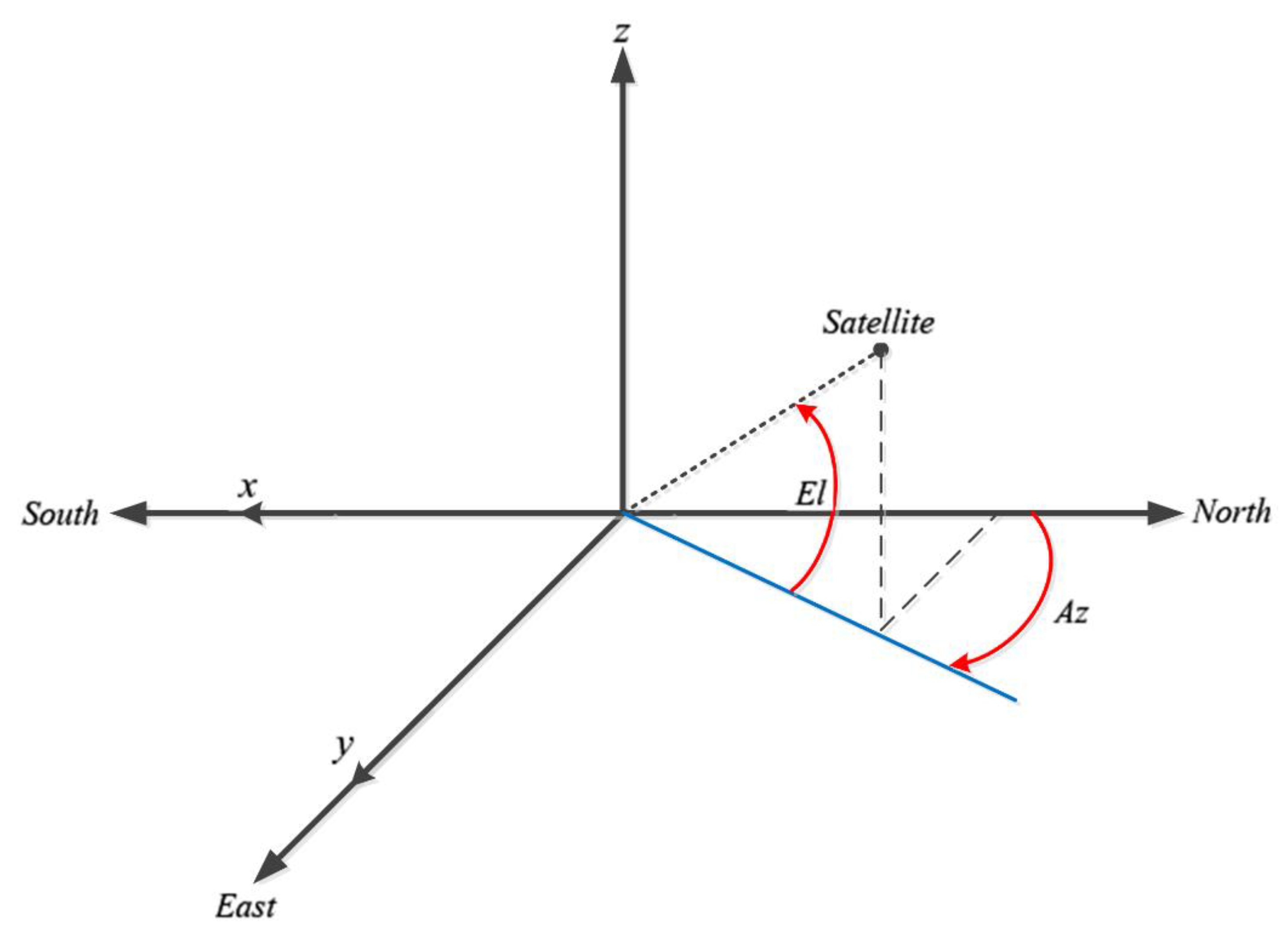
2.1. X-Y Pedestal System
2.2. Unstructured System Identification Using Laguerre Functions
2.3. Predictive Functional Control (PFC)
2.4. PFC Law
2.5. Stability Analysis
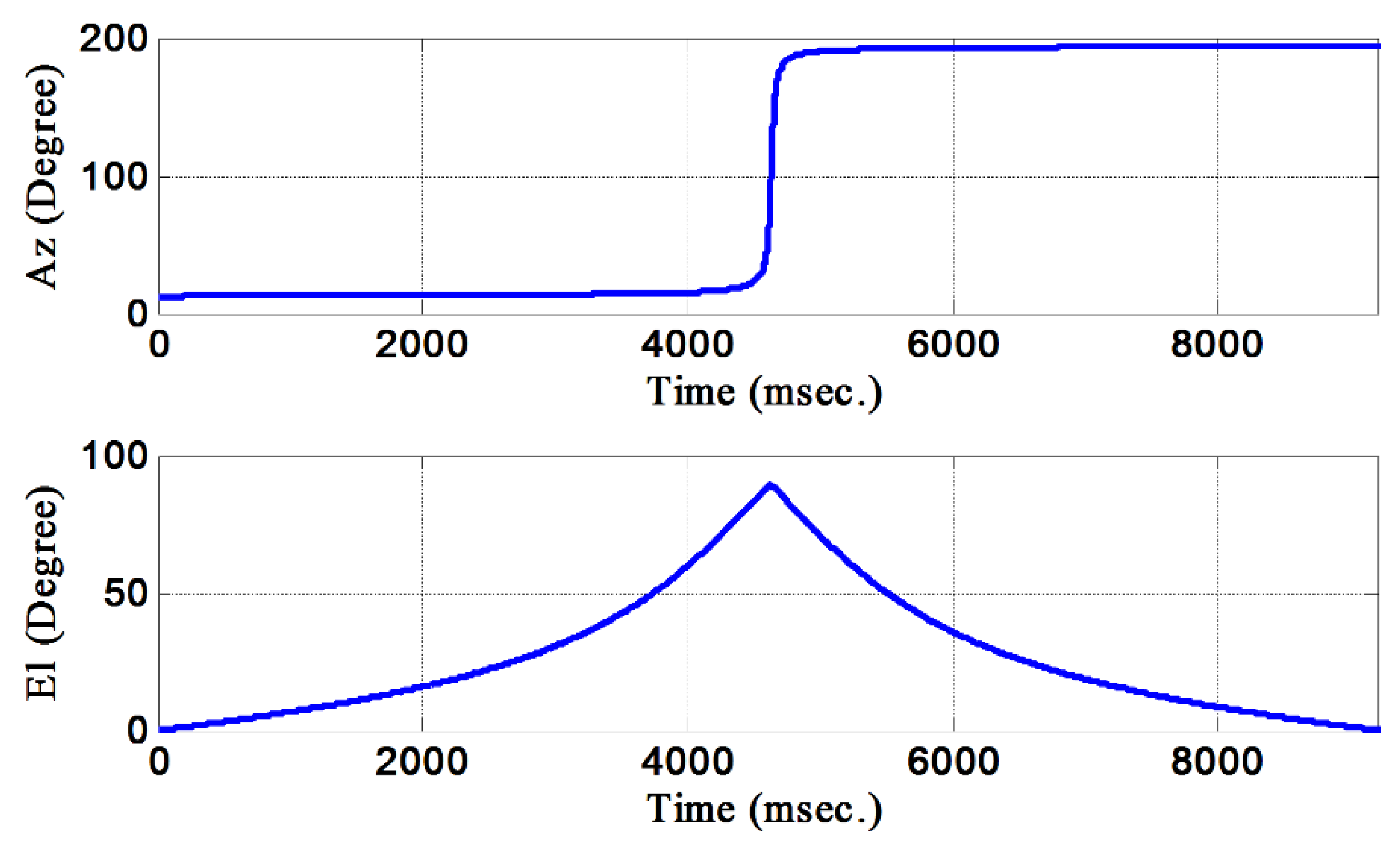
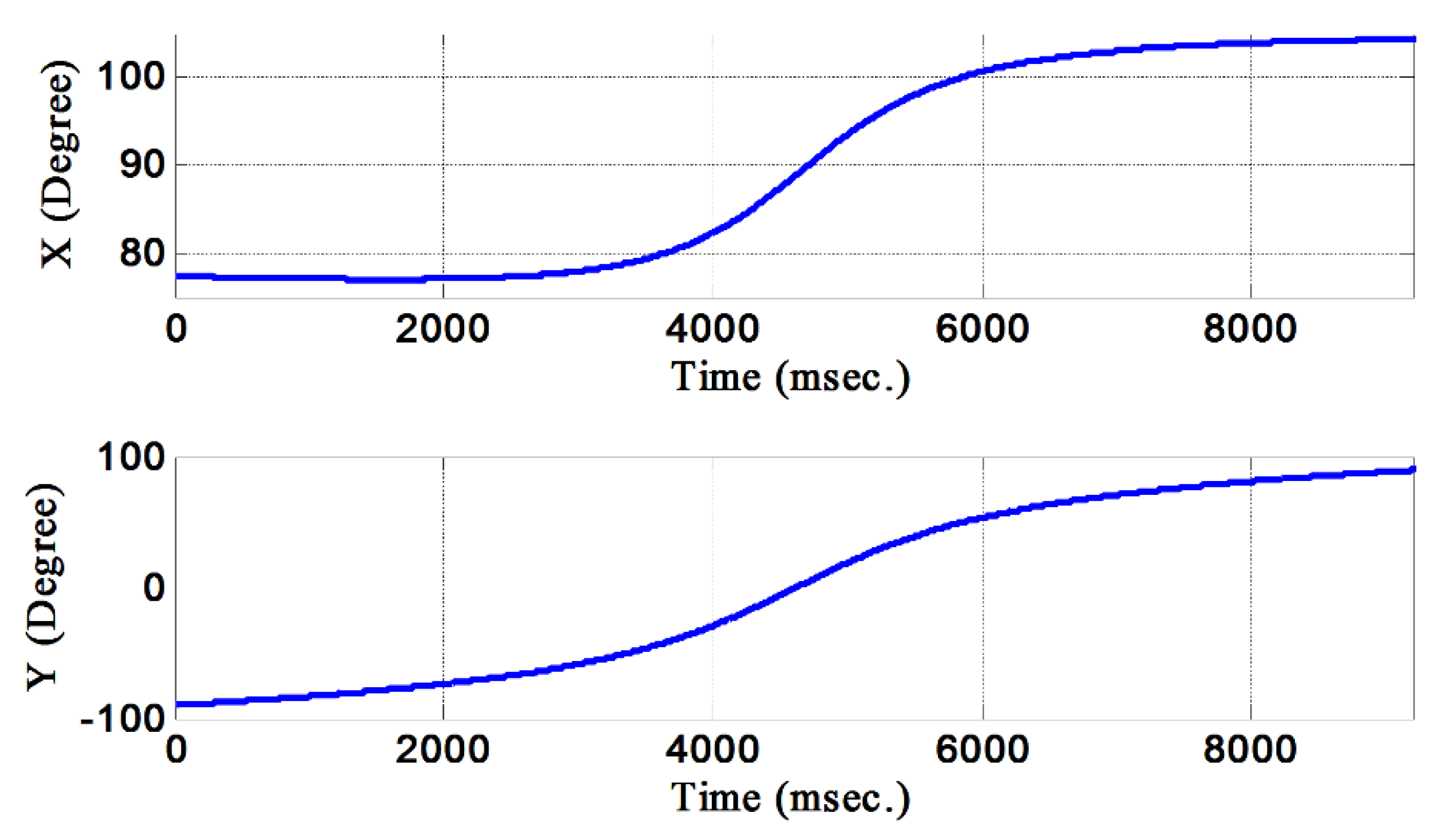
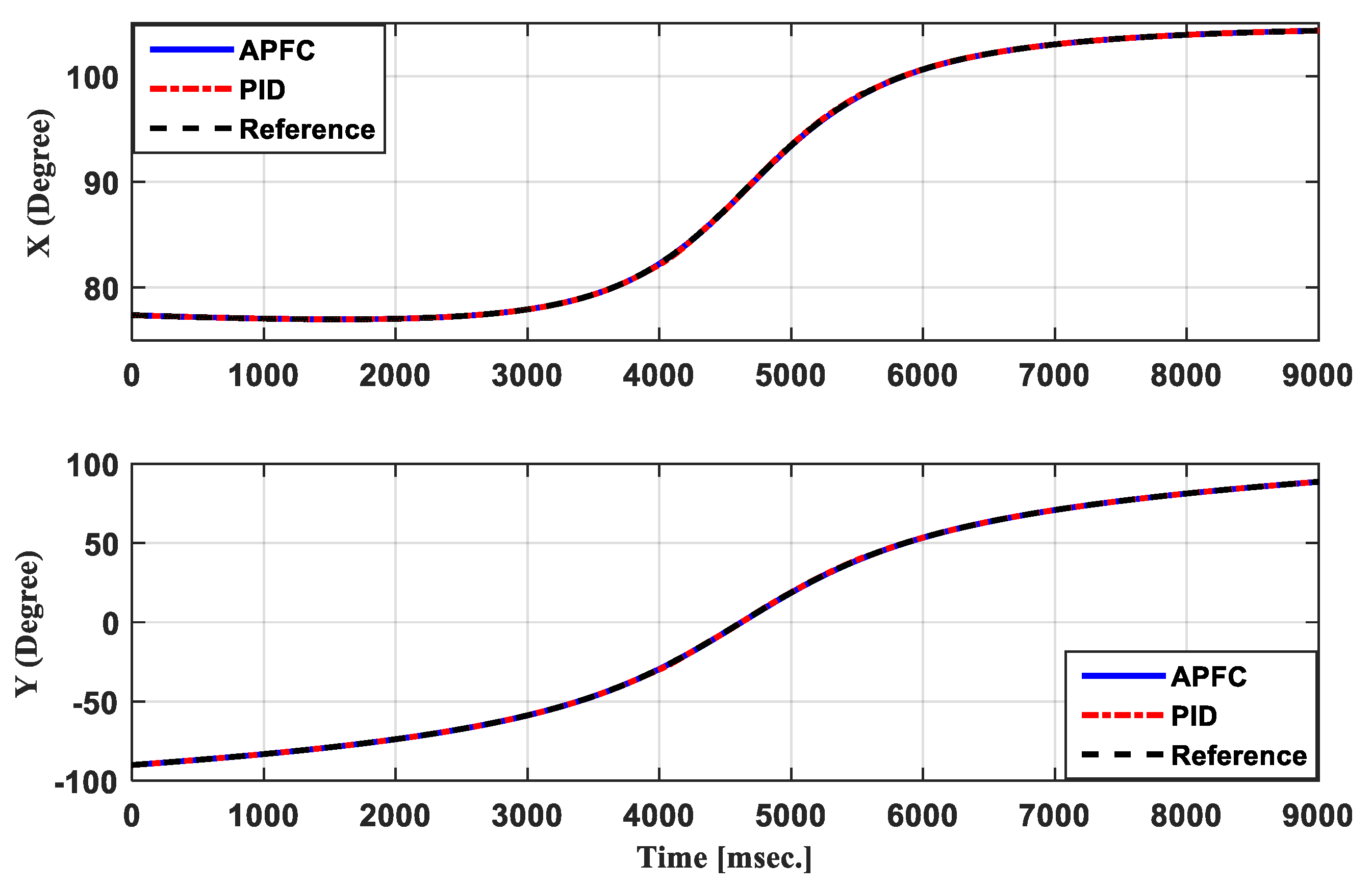
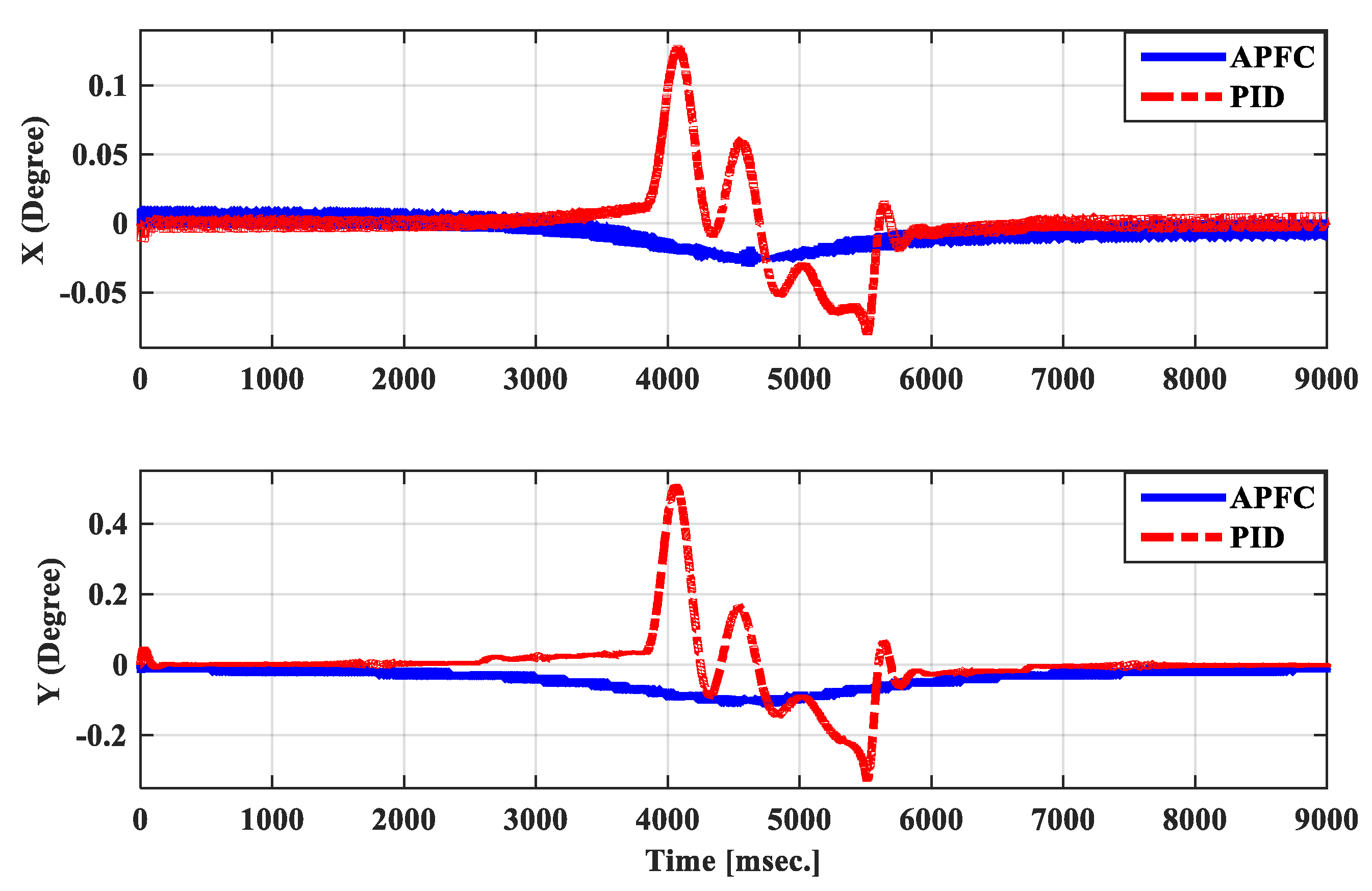
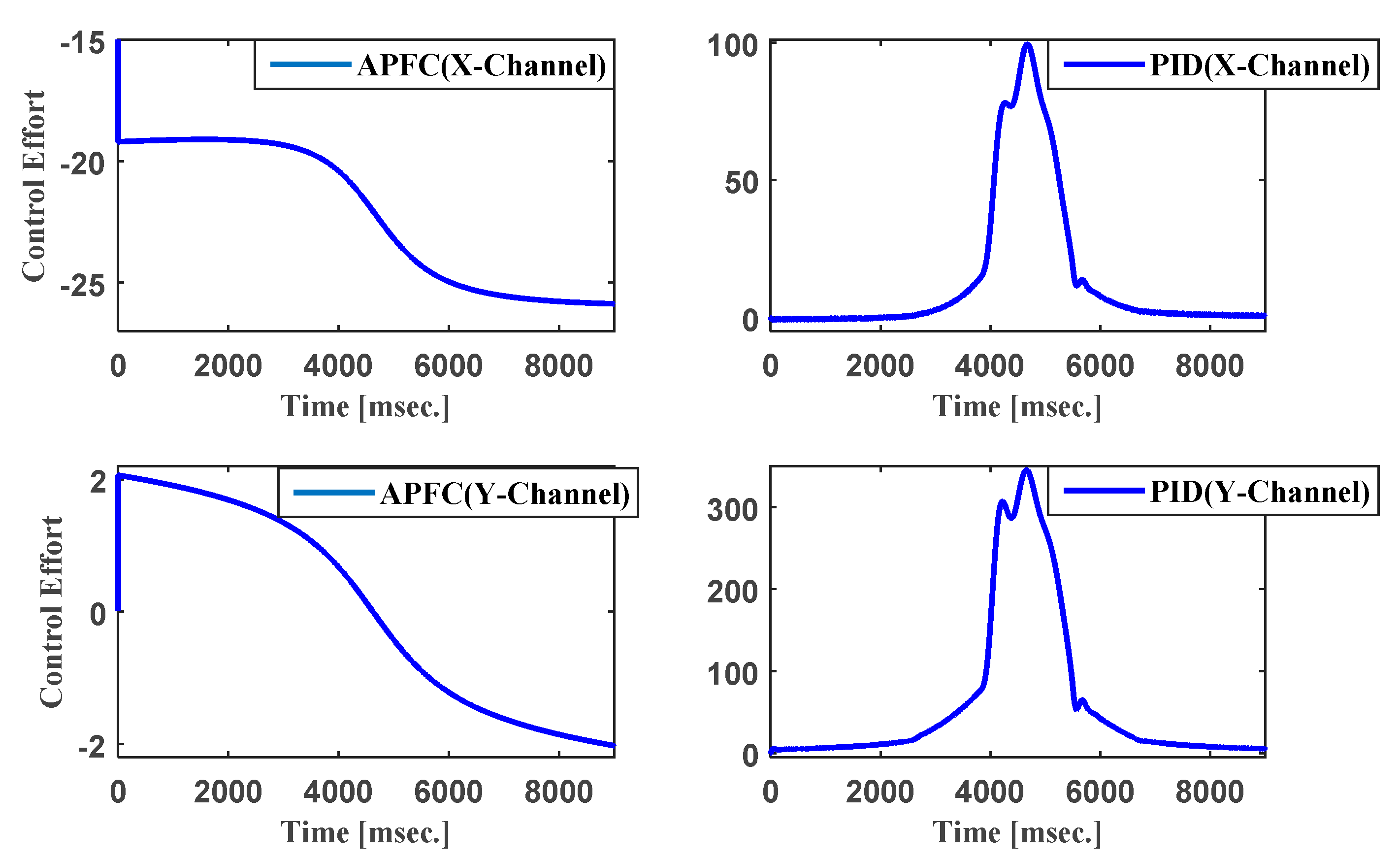
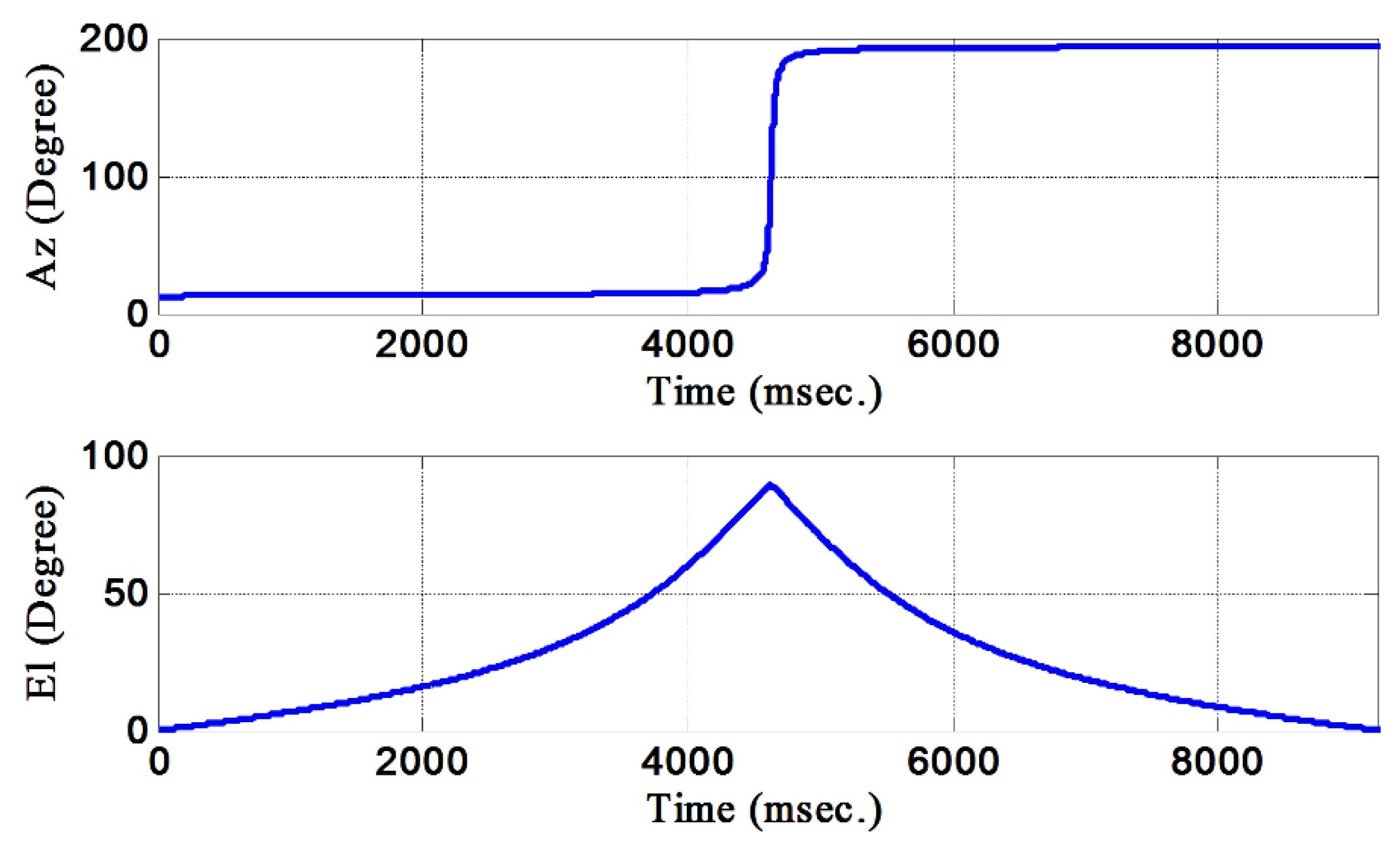
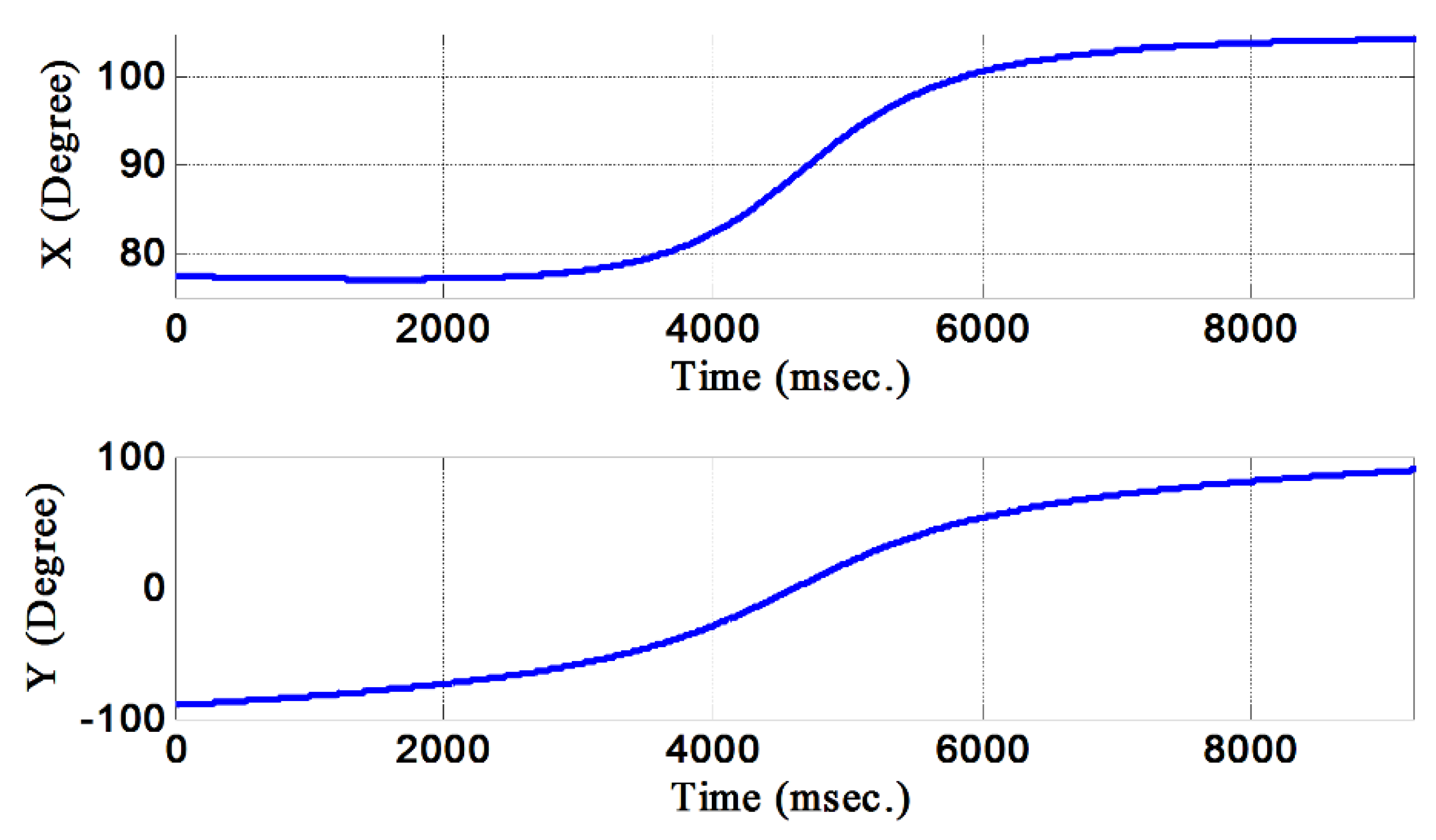
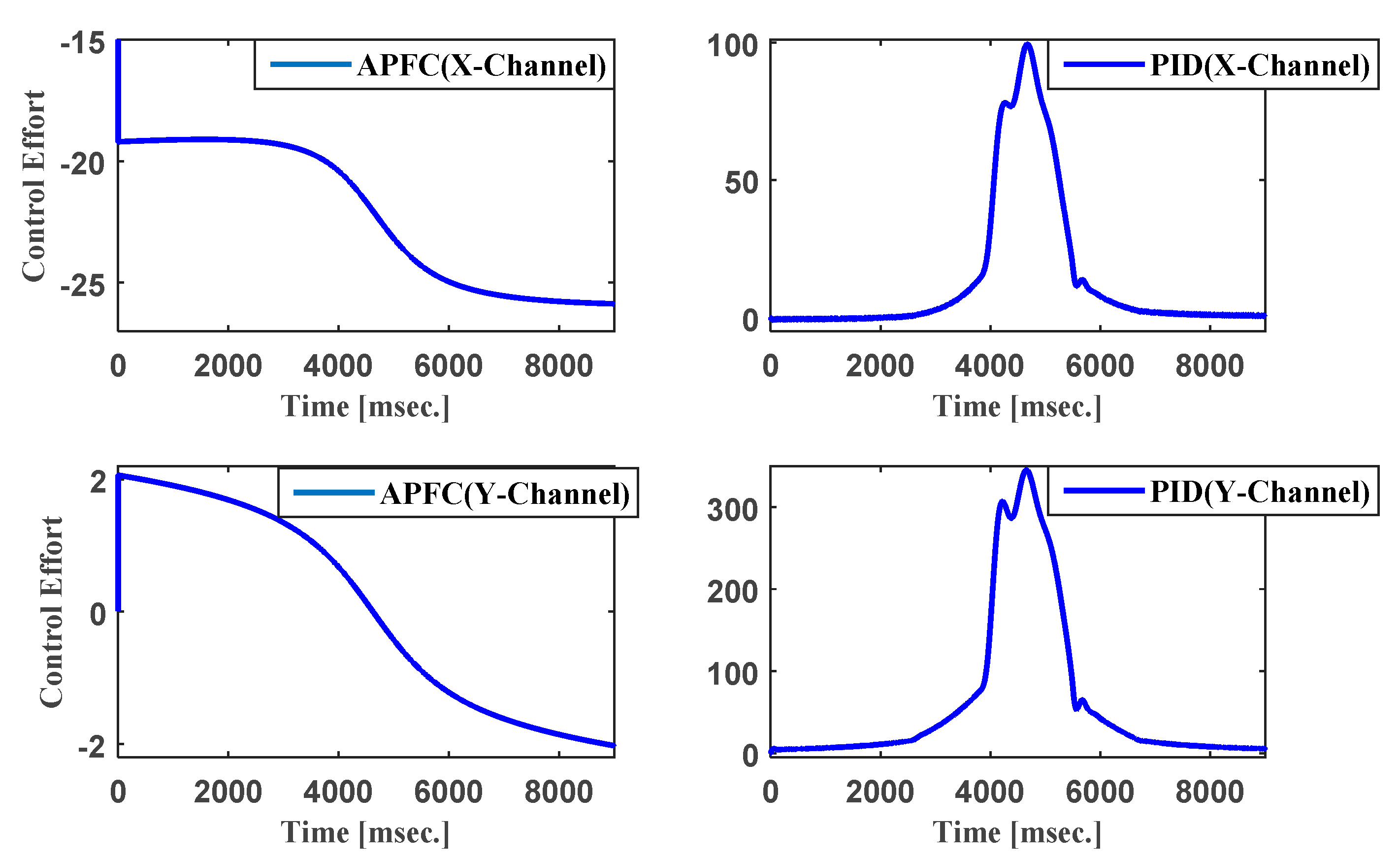
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value | Dimension |
|---|---|---|---|
| mass of link- | |||
| mass of link- | |||
| gravity acceleration | |||
| link- center of mass | |||
| th element of inertia matrix of link- | |||
| th element of inertia matrix of link- | |||
| th element of inertia matrix of link- | |||
| th element of inertia matrix of link- | |||
| length of link- |
References
- Tavassoli Hozouri, B. Eliminating Keyhole Problems in an X–Y Gimbal Assembly. U.S. Patent Application No. 11/405,892, 2007. Wo/2007/121393. Available online: https://patentimages.storage.googleapis.com/7a/9d/b7/07b45dcc3309d5/US20070241244A1.pdf (accessed on 30 August 2021).
- Taheri, A.; Shoorehdeli, M.A.; Bahrami, H.; Fatehi, M.H. Implementation and control of X–Y pedestal using dual-drive technique and feedback error learning for LEO satellite tracking. IEEE Trans. Control Syst. Technol. 2014, 22, 1646–1657. [Google Scholar]
- Looney, C.H.; Carlson, D.J.G. Coverage Diagrams for X–Y and Elevation-Over-Azimuth Antenna Mounts; Tech. Report No.: NASA-TN-D-2963; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 1965.
- Rolinski, A.J.; Carlson, D.J.; Coates, R.J. Satellite-Tracking Characteristics of the X–Y Mount for Data Acquisition Antennas; Tech. Report No.: NASA TN D-1697; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 1964.
- Rolinski, A.J.; Carlson, D.J.; Coates, R.J. The X–Y antenna mount for data acquisition from satellites. IRE Trans. Space Electron. Telemetry 1962, SET-8 (2), 159–163. [Google Scholar] [CrossRef]
- Reisenfeld, S.; Aboutanios, E.; Willey, K.; Eckert, M.; Clout, R.; Thoms, A. The Design of the FedSat Ka Fast Tracking Earth Stations; Univ. Technol; Cooperative Research Centre for Satellite Systems Faculty of Engineering: Atlanta, GA, USA, 2008. [Google Scholar]
- Tehrani, N.M.; Javanfar, E.; Vali, A.; Tehrani, H.M. Full extracting kinematic and dynamic equations of X/Y pedestal with velocity analysis. Proc. Int. Conf. Autom. Control 2014, 215–221. [Google Scholar] [CrossRef]
- Aström, K.J.; Hagglund, T.; Hang, C.C.; Ho, W.K. Automatic tuning and adaptation for PID controllers-a survey. Control Eng. Pract. 1993, 1, 699–714. [Google Scholar] [CrossRef]
- Zhang, R.; Xue, A.; Gao, F. PID Control Using Extended Non-Minimal State Space Model Optimization; Model Predictive Control; Springer: Singapore, 2019. [Google Scholar]
- Wang, L. PID Control System Design and Automatic Tuning Using Matlab/Simulink; Wiley-IEEE Press: Hoboken, NJ, USA, 2020. [Google Scholar]
- Huang, C.-N.; Chung, A. An intelligent design for a PID controller for nonlinear systems. Asian J. Control 2016, 18, 447–455. [Google Scholar] [CrossRef]
- Ghahramani, A.; Karbasi, T.; Nasirian, M.; Sedigh, A.K. Predictive control of a two degrees of freedom XY robot (satellite tracking pedestal) and comparing GPC and GIPC algorithms for satellite tracking. In Proceedings of the 2nd International Conference on Control, Instrumentation and Automation, Shiraz, Iran, 27–29 December 2011; pp. 865–870. [Google Scholar]
- Ghahramani, A.; Karbasi, T.; Nasirian, M.; Sedigh, A.K. Predictive control of earth station antenna (XY pedestal). In Proceedings of the 2nd International Conference on Control, Instrumentation and Automation, Shiraz, Iran, 27–29 December 2011; pp. 344–349. [Google Scholar]
- Wang, H.; Zhao, X.; Tian, Y. Trajectory tracking control of XY table using sliding mode adaptive control based on fast double power reaching law. Asian J. Control 2016, 18, 2263–2271. [Google Scholar] [CrossRef]
- Camacho, E.F.; Bordons, C. Model Predictive Control, 2nd ed.; Springer: London, UK, 2007. [Google Scholar]
- Rossiter, J.A. Model-Based Predictive Control: A Practical Approach; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Paulson, J.A.; Buehler, E.A.; Braatz, R.D.; Mesbah, A. Stochastic model predictive control with joint chance constraints. Int. J. Control 2020, 93, 126–139. [Google Scholar] [CrossRef]
- Zhang, Z.; Rossiter, J.A.; Xie, L.; Su, H. Predictive functional control for integrator systems. J. Frankl. Inst. 2020, 357, 4171–4186. [Google Scholar] [CrossRef]
- Wu, S.; Hou, P.; Zou, H. An improved constrained predictive functional control for industrial processes: A chamber pressure process study. Meas. Control 2020, 53, 833–840. [Google Scholar] [CrossRef]
- Ridong, Z.; Anke, X.; Furong, G. Model Predictive Control: Approaches Based on the Extended State Space Model and Extended Non-minimal State Space Mode; Springer: Singapore, 2019. [Google Scholar]
- Satoh, T.; Saito, N.; Nagase, J.-Y.; Saga, N. Predictive functional control of an axis positioning system with an estimator-based internal model. Control Eng. Pract. 2019, 86, 1–10. [Google Scholar] [CrossRef]
- Richalet, J.; O’Donovan, D. Predictive Functional Control Principles and Industrial Applications; Springer: London, UK, 2009. [Google Scholar]
- Astrom, K.J.; Wittenmark, B. Adaptive Control, 2nd ed.; Dover Publication: New York, NY, USA, 2008. [Google Scholar]
- Wang, L.P. Discrete model predictive controller design using Laguerre functions. J. Process Contr. 2004, 14, 131–142. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Z.; Wang, Y.; Li, M.; Qin, T. Adaptive predictive control algorithm based on Laguerre functional model. Int. J. Adapt. Control Signal Process. 2006, 20, 53–76. [Google Scholar] [CrossRef]
- Hidayat, E.; Medvedev, A. Laguerre domain identification of continuous linear time-delay systems from impulse response data. Automatica 2012, 48, 2902–2907. [Google Scholar] [CrossRef]
- Xu, M.; Li, X.; Liu, H.; Hao, Y. Adaptive predictive functional control with stochastic search. Proc. IEEE Int. Conf. Inform. Acquisition 2006, 1354–1358. [Google Scholar] [CrossRef]
- Xu, M.; Liu, H.; Li, X.; Li, S. A steady adaptive predictive functional control with chaotic optimization. Proc. Sixth Int. Conf. Intell. Syst. Design Appl. 2006, 2, 137–141. [Google Scholar]
- Ridong, Z.; Shuqing, W. Predictive functional controller with a similar proportional integral optimal regulator structure: Comparison with traditional predictive functional controller and application to heavy oil coking equipment. Chin. J. Chem. Eng. 2007, 15, 247–253. [Google Scholar]
- Dadkhah Tehrani, R.; Ferdowsi, M.H. Adaptive predictive functional control with similar PI structure using unstructured system identification based on Laguerre functions. Int. J. Control Theory Comput. Model 2012, 2, 1–13. [Google Scholar] [CrossRef]
- Plewa, P. Hardy’s inequality for Laguerre expansions of Hermite type. J. Fourier Anal. Appl. 2019, 25, 1855–1873. [Google Scholar] [CrossRef] [Green Version]
- Rossiter, J.A.; Aftab, M.S. A Comparison of Tuning Methods for Predictive Functional Control. Processes 2021, 9, 1140. [Google Scholar] [CrossRef]
- Rossiter, J.A.; Abdullah, M. Using Laguerre functions to improve the tuning and performance of predictive functional control. Int. J. Control 2021, 94, 202–214. [Google Scholar] [CrossRef] [Green Version]
- Ljung, L. System Identification Theory for the User, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Zhou, H.; Ma, G.; Yan, G.; Sun, X. Incremental recursive least-squares identification for the systems under poor observation condition. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 1649–1652. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dadkhah Tehrani, R.; Givi, H.; Crunteanu, D.-E.; Cican, G. Adaptive Predictive Functional Control of X-Y Pedestal for LEO Satellite Tracking Using Laguerre Functions. Appl. Sci. 2021, 11, 9794. https://doi.org/10.3390/app11219794
Dadkhah Tehrani R, Givi H, Crunteanu D-E, Cican G. Adaptive Predictive Functional Control of X-Y Pedestal for LEO Satellite Tracking Using Laguerre Functions. Applied Sciences. 2021; 11(21):9794. https://doi.org/10.3390/app11219794
Chicago/Turabian StyleDadkhah Tehrani, Reza, Hadi Givi, Daniel-Eugeniu Crunteanu, and Grigore Cican. 2021. "Adaptive Predictive Functional Control of X-Y Pedestal for LEO Satellite Tracking Using Laguerre Functions" Applied Sciences 11, no. 21: 9794. https://doi.org/10.3390/app11219794
APA StyleDadkhah Tehrani, R., Givi, H., Crunteanu, D.-E., & Cican, G. (2021). Adaptive Predictive Functional Control of X-Y Pedestal for LEO Satellite Tracking Using Laguerre Functions. Applied Sciences, 11(21), 9794. https://doi.org/10.3390/app11219794