
The EU-SENSE System for Chemical Hazards Detection, Identification, and Monitoring

 ,
, {kind=link}
{kind=link}
Abstract
:1. Introduction
2. Chemical Sensors Overview
- Ion mobility spectrometry (IMS): A sensor draws an air sample into the reaction area, where it is ionized. A detector plate registers the time at which the ions cross the tube. The plot of the ion current that is generated over a given period indicates the concentration of the agent [19]. IMS was infrequent until the first IM-MS (ion mobility–mass spectrometry) instruments were launched onto the market [20];
- Flame photometry: This kind of sensor burns an air sample, which emits light of a specific wavelength, which is extracted by an optical filter. Most known elements produce a wavelength that is sufficiently characteristic to allow for an accurate identification [21];
- Infrared spectroscopy (IR spectroscopy): A gas is exposed to radiation in the range of 2.5–25 micrometres, which passes through it and is then absorbed in wavelengths characteristic for certain elements. IR spectroscopy is used in sensors detecting blisters and nerve agent vapours. IR-based sensors used in field conditions evaluate whether the sample contains a given chemical, rather than providing full identification. A rapidly emerging technique is atomic force microscopy-based infrared spectroscopy (AFM-IR) [22];
3. Methods
3.1. EU-SENSE Case Study
3.1.1. EU-SENSE Project Rationale and Objectives
- Contributing to better situational awareness of the CBRN practitioners through the development of a novel network of chemical sensors;
- Improving the reconnaissance capabilities of the novel network of chemical sensors using machine learning algorithms (to reduce the false alarm rate) and the application of contaminant dispersion models, showcasing the usability of the EU-SENSE network to CBRN practitioners to validate the system, and maximizing its exploitation potential. The objective also involves the preparation of training sessions with CBRN practitioners [31].
3.1.2. Heterogeneous Sensor Node Components
- Airsense IMS detector with ammonia chemistry with integrated photon ionisation detector (PID);
- Airsense IMS detector with water chemistry with integrated electrochemical cell (EC);
- Proengin AP4C flame photometric detector (FPD);
- TNO SRD metal oxide detector prototype.
3.1.3. Chemical Agents to Be Detected
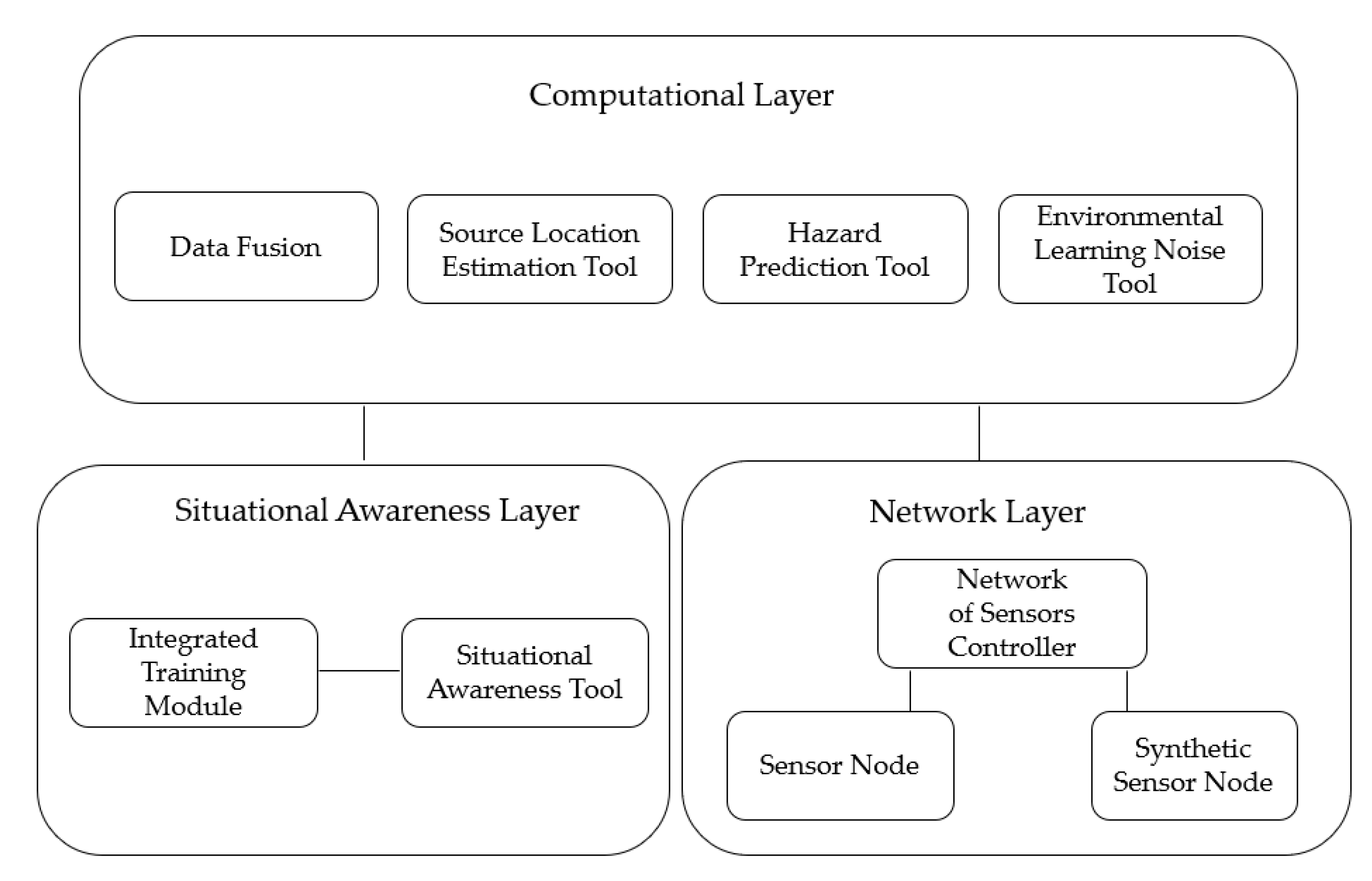
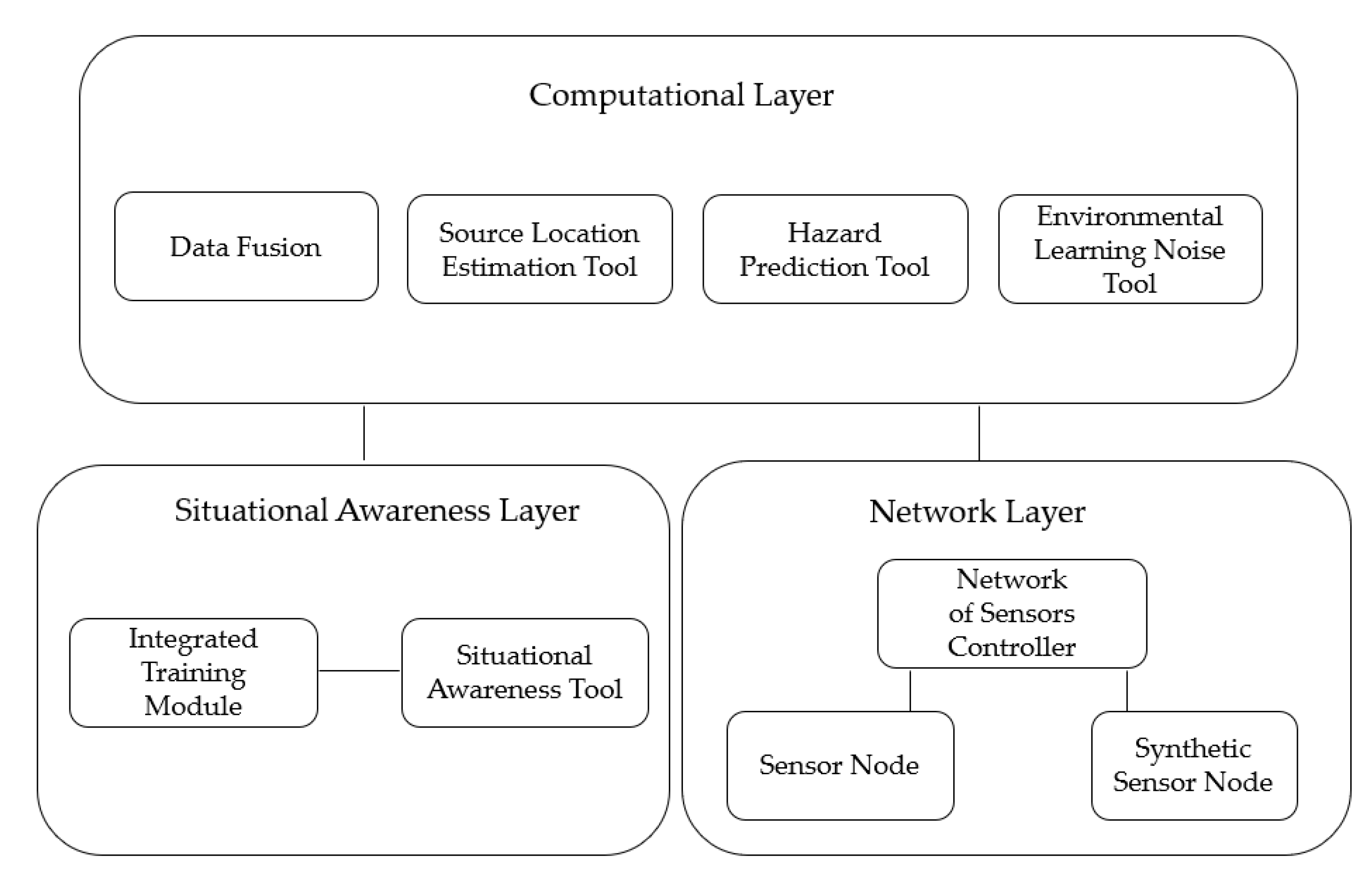
3.1.4. EU-SENSE System Architecture
Situational Awareness Layer
Computational Layer
Network Layer
3.1.5. Demonstration of the EU-SENSE System
3.1.6. Applicational Potential
3.1.7. Sensor Data Fusion and Machine Learning
- It detects small concentrations;
- It detects signals of harmless substances;
- It detects artefacts.
4. Results and Discussion
- The main result of the project is the EU-SENSE system, based on machine learning algorithms that work with data coming from different nodes. The system’s advantage is to reduce noise from the environment (false alarm rate). When an anomaly is detected in the environmental noise, inverse dispersion modelling is used for source characterization. As a result, the source position and the source strength are reliably estimated;
- The EU-SENSE system is a versatile, state-of-the-art solution that will enhance the work of CBRN practitioners. Data on hazardous substances are gathered systemically and more effectively when compared with a situation where CBRN personnel use different devices to detect a chemical hazard. The incoming data are formatted, and, in case of large contamination, are sent to a CBRN warning and reporting centre;
- Introducing a new system often involves training. In the case of the EU-SENSE system, a training mode was proposed. It will involve a case study approach and simulation;
- A framework for research and development activities can be applied in other work on developing sensors for testing environments. A problem-solving theory can stipulate other eventual commercial products [49].
5. Conclusions
- This case study aimed to propose a novel approach to chemical reconnaissance system development. It proposed using machine learning, modelling algorithms and a contaminant dispersion model to combine signals from different sensors, and to reduce the false alarm rate. From proof of concept to a prototype, this study analysed the development of the EU-SENSE, specifically heterogeneous sensor nodes components, chemical agents to be detected, and EU-SENSE system architecture with situational awareness, computational, and network layers. The authors believe that the development of such devices will trigger new approaches to chemical reconnaissance. Effectiveness in a less predictable environment must be more rapid, reliable, and flexible. Therefore, more advanced solutions based on artificial intelligence should be developed to help CBRN first responders act more effectively;
- The confidence of future system users will be built through special training on the system functionalities and use in the field. The training modes will rely on the active didactic methods: case study analysis and a simulation;
- The proposed design of the system developed with the research and development activities can be used in other areas, namely in biological or radiological threat detection. Future directions of research and development works can be proposed in this area.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Commission. Commission staff Working Document. In Overview of Natural and Man-Made Disaster Risks the European Union May Face; European Commission: Brussels, Belgium, 2021. [Google Scholar]
- Sun, Y.; Qian, X.; Liu, Y.; Wang, J.; Lv, Q.; Yuan, M. Identification of Typical Solid Hazardous Chemicals Based on Hyperspectral Imaging. Remote. Sens. 2021, 13, 2608. [Google Scholar] [CrossRef]
- Henretig, F.M.; Kirk, M.A.; McKay, C.A., Jr. Hazardous Chemical Emergencies and Poisonings. N. Engl. J. Med. 2019, 380, 1638–1655. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.; Liu, T.; Liu, Y. Cause Analysis of Unsafe Behaviors in Hazardous Chemical Accidents: Combined with HFACs and Bayesian Network. Int. J. Environ. Res. Public Health 2019, 17, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ðokic, J.; Arsic, N.; Milentijevic, G. Natural Disasters in Industrial Areas. In Natural Risk Management and Engineering: NatRisk Project; Gocić, M., Aronica, G.T., Stavroulakis, G.E., Trajković, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 89–114. [Google Scholar]
- Brooker, C. Churchill Livingstone Medical Dictionary E-Book; Elsevier Health Sciences: Norfolk, UK, 2008. [Google Scholar]
- Steinhausler, F.; Steinhäusler, F.; Edwards, F. (Eds.) NATO and Terrorism Catastrophic Terrorism and First Responders: Threats and Mitigation; Springer Science & Business Media: Dordrecht, The Netherlands, 2005; Volume 2. [Google Scholar]
- Ganesan, K.; Raza, S.K.; Vijayaraghavan, R. Chemical warfare agents. J. Pharm. Bioallied Sci. 2010, 2, 166–178. [Google Scholar] [CrossRef] [PubMed]
- NYC Health, Toxic Industrial Chemicals. City of New York: N.d. Available online: https://www1.nyc.gov/site/doh/health/emergency-preparedness/emergencies-chemical-toxic-industrial-chemicals.page (accessed on 1 October 2021).
- Vaseashta, A.; Khudaverdyan, S. (Eds.) NATO Science for Peace and Security Studies Series—B: Physics and Biophysics. In Advanced Sensors for Safety and Security; Springer: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Hua, M.Z.; Li, S.; Wang, S.; Lu, X. Detecting chemical hazards in foods using microfluidic paper-based analytical devices (μpads): The real-world application. Micromachines 2018, 9, 32. [Google Scholar] [CrossRef] [Green Version]
- Tørnes, J.A. A novel headspace sampler for field detection of chemical warfare agents and simulants connected to a commercial ion mobility detector. Int. J. Ion Mobil. Spectrom. 2016, 19, 105–112. [Google Scholar] [CrossRef]
- Mesilaakso, M.E. Chemical Weapons Convention Chemicals Analysis: Sample Collection, Preparation and Analytical Methods; John Wiley & Sons Ltd.: Chichester, UK, 2005. [Google Scholar]
- Martellini, M.; Trapp, R. (Eds.) 21st Century Prometheus: Managing CBRN Safety and Security Affected by Cutting-Edge Technologies; Springer Nature: Cham, Switzerland, 2020. [Google Scholar]
- Koblentz, G.D. Emerging Technologies and the Future of CBRN Terrorism. Wash. Q. 2020, 43, 177–196. [Google Scholar] [CrossRef]
- Reding, D.F.; Eaton, J. Science & Technology Trends 2020–2040. Exploring the S&T Edge; NATO Science & Technology Organization: Brussels, Belgium, 2020. [Google Scholar]
- European Commission. Communication from the Commission on the EU Security Union Strategy; European Commission: Brussels, Belgium, 2020. [Google Scholar]
- Sun, Y.; Ong, K.Y. Detection Technologies for Chemical Warfare Agents and Toxic Vapors; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Spencer, R.C. Chemical and Biological Terrorism: Research and Development to Improve Civilian Medical Response; The National Academies Press: Washington, DC, USA, 1999. [Google Scholar] [CrossRef]
- Hernández-Mesa, M.; Escourrou, A.; Monteau, F.; Le Bizec, B.; Dervilly-Pinel, G. Current applications and perspectives of ion mobility spectrometry to answer chemical food safety issues. TrAC Trends Anal. Chem. 2017, 94, 39–53. [Google Scholar] [CrossRef]
- Stela, M.; Ceremuga, M.; Szyposzyńska, M.; Spławska, A.; Mirosz, D.; Truszkowska, K. Detection of chemical contaminants. In CBRN. Security Manager Handbook; Bijak, M., Ed.; University of Łódź: Łódź, Poland, 2018; pp. 409–459. [Google Scholar]
- Dazzi, A.; Prater, C.B. AFM-IR: Technology and Applications in Nanoscale Infrared Spectroscopy and Chemical Imaging. Chem. Rev. 2017, 117, 5146–5173. [Google Scholar] [CrossRef]
- Mujahid, A.; Dickert, F.L. Surface Acoustic Wave (SAW) for Chemical Sensing Applications of Recognition Layers. Sensors 2017, 17, 2716. [Google Scholar] [CrossRef] [Green Version]
- Go, D.B.; Atashbar, M.Z.; Ramshani, Z.; Chang, H.C. Surface acoustic wave devices for chemical sensing and microfluidics: A review and perspective. Anal. Methods 2017, 9, 4112–4134. [Google Scholar] [CrossRef]
- Kangas, M.J.; Burks, R.M.; Atwater, J.; Lukowicz, R.M.; Williams, P.; Holmes, A.E. Colorimetric Sensor Arrays for the Detection and Identification of Chemical Weapons and Explosives. Crit. Rev. Anal. Chem. 2017, 47, 138–153. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fernandes, G.M.; Silva, W.R.; Barreto, D.N.; Lamarca, R.S.; Gomes, P.C.F.L.; Petruci, J.F.D.S.; Batista, A.D. Novel approaches for colorimetric measurements in analytical chemistry—A review. Anal. Chim. Acta 2020, 1135, 187–203. [Google Scholar] [CrossRef] [PubMed]
- Sferopoulos, R. Review of Chemical Warfare Agent (CWA) Detector Technologies and Commercial-Off-The-Shelf Items; Human Protection and Performance Division DSTO Defence Science and Technology Organisation: Victoria, Australia, 2009. [Google Scholar]
- Jiang, Y.; Sun, D.-W.; Pu, H.; Wei, Q. Surface enhanced Raman spectroscopy (SERS): A novel reliable technique for rapid detection of common harmful chemical residues. Trends Food Sci. Technol. 2018, 75, 10–22. [Google Scholar] [CrossRef]
- CORDIS. European Sensor System for CBRN Applications. Available online: https://cordis.europa.eu/project/id/787031/pl (accessed on 18 June 2021).
- International Forum to Advance First Responder Innovation. Capability Gaps. Available online: https://www.internationalresponderforum.org/capability-gaps-overview (accessed on 18 July 2021).
- EU-SENSE. EU-SENSE About. Available online: https://eu-sense.eu/about/ (accessed on 18 July 2021).
- Dobrowolska-Opala, M.; Gudzbeler, G. European Sensor System for CBRN Applications. In Proceedings of the 9th International Defence and Homeland Security Simulation Workshop, Lisbon, Portugal, 18–20 September 2019; pp. 16–22. [Google Scholar]
- Bland, S.A. Chemical, Biological, Radiological and Nuclear (CBRN) Casualty Management Principles. In Conflict and Catastrophe Medicine; Springer: Berlin/Heidelberg, Germany, 2014; pp. 747–770. [Google Scholar] [CrossRef]
- NATO Standarisation Agency. ATP-45(D) Warning and Reporting and Hazard Prediction of Chemical, Biological, Radiological and Nuclear Incidents (Operators Manual); NSA: Brussels, Belgium, 2020. [Google Scholar]
- CORDIS. Periodic Reporting for period 1—EU-SENSE (European Sensor System for CBRN Applications). Available online: https://cordis.europa.eu/project/id/787031/reporting (accessed on 8 April 2021).
- Szklarski, L.; Maik, P.; Walczyk, W.M.; Guicheteau, J.A.; Howle, C.R. Developing a novel network of CBRNe sensors in response to existing capability gaps in current technologies. In Proceedings of the Chemical, Biological, Radiological, Nuclear, and Explosives (CBRNE) Sensing XXI, Online, 24 April 2020. [Google Scholar] [CrossRef]
- EU-SENSE. Dispersion modelling in EU-SENSE. Available online: https://eu-sense.eu/dispersion-modelling-in-eu-sense/ (accessed on 18 July 2021).
- EU-SENSE. The final demonstration of the EU-SENSE system. Available online: https://eu-sense.eu/the-final-demonstration-of-the-eu-sense-system/ (accessed on 22 October 2021).
- Pich, R.; Maciejewski, P.; Wrzesiński, J.A. Casualties Traffic Organization During Mass Decontamination. Bepieczeństwo i Tech. Pożarnicza 2011, 23, 115–122. [Google Scholar]
- Maciejewski, P.; Pich, R.; Wrzesiński, J. Specjalistyczne grupy ratownictwa chemiczno-ekologicznego Państwowej Straży Pożarnej-zadania i wyposażenie-część I. Zesz. Nauk./Wyższa Szkoła Oficer. Wojsk Lądowych Im. Gen. T. Kościuszki 2010, 1, 150–160. [Google Scholar]
- Maciejewski, P.; Pich, R.; Wrzesiński, J. Specjalistyczne grupy ratownictwa chemiczno-ekologicznego Państwowej Straży Pożarnej-zadania i wyposażenie-część II. Zesz. Nauk./Wyższa Szkoła Oficer. Wojsk Lądowych Im. Gen. T. Kościuszki 2010, 2, 217–241. [Google Scholar]
- Maciejewski, P. Ocena Sytuacji Skażeń po Zdarzeniach CBRN z Wykorzystaniem Narzędzi Informatycznych PROMIEŃ 3.0 Oraz PGO 2014/; National Defence University: Warsaw, Poland, 2016. [Google Scholar]
- Maciejewski, P.; Robak, W.; Młynarczyk, M. Protection from CBRN contamination in the Polish Armed Forces. Saf. Fire Technology 2015, 37, 107–118. [Google Scholar] [CrossRef]
- NATO Standarisation Agency. ATP-3.8.1—CBRN Defence on Operations; NSA: Brussels, Belgium, 2010; Volume I. [Google Scholar]
- Madigan, M.L. HAZMAT Guide for First Responders; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Jensen, F.V.; Nielsen, T.D. Bayesian Networks and Decision Graphs; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2007. [Google Scholar]
- Robins, P.; Thomas, P. Non-linear Bayesian CBRN source term estimation. In Proceedings of the 7th International Conference on Information Fusion, Philadelphia, PA, USA, 25–28 July 2005. [Google Scholar]
- Mitchell, H.B. Multi-Sensor Data Fusion. An Introduction; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar] [CrossRef]
- Zainal, Z. Case study as a research method. J. Kemanus. 2007, 9, 1–6. [Google Scholar]
- Jung, S.; Woo, J.; Kang, C. Analysis of severe industrial accidents caused by hazardous chemicals in South Korea from January 2008 to June 2018. Saf. Sci. 2020, 124, 104580. [Google Scholar] [CrossRef]
- Chen, C.; Reniers, G. Chemical industry in China: The current status, safety problems, and pathways for future sustainable development. Saf. Sci. 2020, 128, 104741. [Google Scholar] [CrossRef]
- Cibulova, K.; Formanek, M.; Priesner, M. The Possible Means Suggested for Improvement of Evaluation of Low Endurable Terrain. In Durability of Critical Infrastructure, Monitoring and Testing, Proceedings of the ICDCF 2016, Šatov, Czech Republic, 6–9 December 2016; Springer: Singapore, 2017; pp. 17–26. [Google Scholar] [CrossRef]
- Osei-Kyei, R.; Tam, V.; Ma, M.; Mashiri, F. Critical review of the threats affecting the building of critical infrastructure resilience. Int. J. Disaster Risk Reduct. 2021, 60, 102316. [Google Scholar] [CrossRef]
- Hamamoto, S.; Ito, L.; Yoneyama, N.; Tokai, A. Case Study for the Predictive Environmental Risk Assessment of Hexamethylenetetramine Release to the Yodo River during a Massive Tsunami Attack. Water 2021, 13, 549. [Google Scholar] [CrossRef]
- Casillas, R.P.; Tewari-Singh, N.; Gray, J.P. Special issue: Emerging chemical terrorism threats. Toxicol. Mech. Methods 2021, 31, 239–241. [Google Scholar] [CrossRef] [PubMed]
- Zhu, R.; Hu, X.; Bai, Y.; Li, X. Risk analysis of terrorist attacks on LNG storage tanks at ports. Saf. Sci. 2021, 137, 105192. [Google Scholar] [CrossRef]
- Weichbroth, P. Usability attributes revisited: A time-framed knowledge map. In Proceedings of the 2018 Federated Conference on Computer Science and Information Systems, Poznan, Poland, 9–12 September 2018; pp. 1005–1008. [Google Scholar]
- Owoc, M.L.; Sawicka, A.; Weichbroth, P. Artificial Intelligence Technologies in Education: Benefits, Challenges and Strategies of Implementation. In Artificial Intelligence for Knowledge Management; Springer: Cham, Switzerland, 2021; pp. 37–58. [Google Scholar] [CrossRef]
- Młynarczyk, M.; Maciejewski, P.; Szerszeń, M. CBRN Analysis and SI Promień—Comparison of the Functionality of the Software for the Assessment of Contamination. Saf. Fire Technol. 2015, 40, 133–138. [Google Scholar] [CrossRef]
- Huang, X.; Arvin, F.; West, C.; Watson, S.; Lennox, B. Exploration in Extreme Environments with Swarm Robotic System. In Proceedings of the 2019 IEEE International Conference on Mechatronics (ICM), Ilmenau, Germany, 18–20 March 2019; pp. 193–198. [Google Scholar]
- Wang, L.L.; Zhou, W.P. On Emergency Response of Swarm Robotics for Chemical Hazards. Adv. Mater. Res. 2014, 1037, 327–333. [Google Scholar] [CrossRef]
- Hunt, E.R.; Cullen, C.B.; Hauert, S. Value at Risk strategies for robot swarms in hazardous environments. In Proceedings of the Unmanned Systems Technology XXIII, SPIE Defense + Commercial Sensing, Online, 12 April 2021; Society of Photo-Optical Instrumentation Engineers (SPIE): Bellingham, WA, USA, 2021. [Google Scholar]
- Kumar, H.; Kumari, N.; Sharma, R. Nanocomposites (conducting polymer and nanoparticles) based electrochemical biosensor for the detection of environment pollutant: Its issues and challenges. Environ. Impact Assess. Rev. 2020, 85, 106438. [Google Scholar] [CrossRef]
- Amgarou, K.; Aspe, F.; Idoeta, R.; Herranz, M. Recommendations for the selection of in situ measurement techniques for radiological characterization in nuclear/radiological installations under decommissioning and dismantling processes. Prog. Nucl. Energy 2021, 137, 103761. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gawlik-Kobylińska, M.; Gudzbeler, G.; Szklarski, Ł.; Kopp, N.; Koch-Eschweiler, H.; Urban, M. The EU-SENSE System for Chemical Hazards Detection, Identification, and Monitoring. Appl. Sci. 2021, 11, 10308. https://doi.org/10.3390/app112110308
Gawlik-Kobylińska M, Gudzbeler G, Szklarski Ł, Kopp N, Koch-Eschweiler H, Urban M. The EU-SENSE System for Chemical Hazards Detection, Identification, and Monitoring. Applied Sciences. 2021; 11(21):10308. https://doi.org/10.3390/app112110308
Chicago/Turabian StyleGawlik-Kobylińska, Małgorzata, Grzegorz Gudzbeler, Łukasz Szklarski, Norbert Kopp, Helge Koch-Eschweiler, and Mariusz Urban. 2021. "The EU-SENSE System for Chemical Hazards Detection, Identification, and Monitoring" Applied Sciences 11, no. 21: 10308. https://doi.org/10.3390/app112110308
APA StyleGawlik-Kobylińska, M., Gudzbeler, G., Szklarski, Ł., Kopp, N., Koch-Eschweiler, H., & Urban, M. (2021). The EU-SENSE System for Chemical Hazards Detection, Identification, and Monitoring. Applied Sciences, 11(21), 10308. https://doi.org/10.3390/app112110308