
Prescribed Performance Control for the Upper-Limb Exoskeleton System in Passive Rehabilitation Training Tasks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
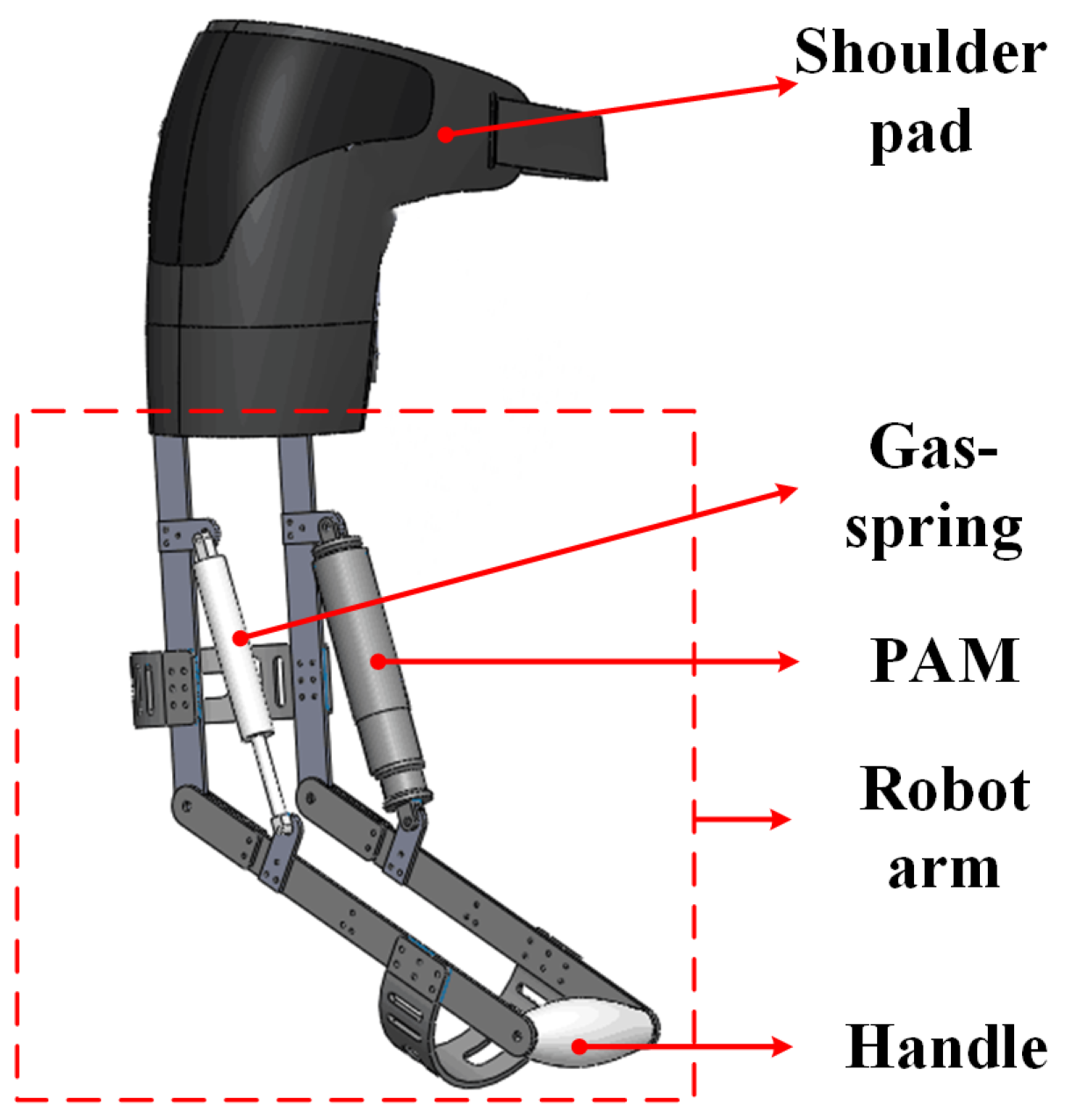
2. One-DOF Upper-Limb Exoskeleton
3. Model-Free Adaptive Control with Prescribed Performance Method
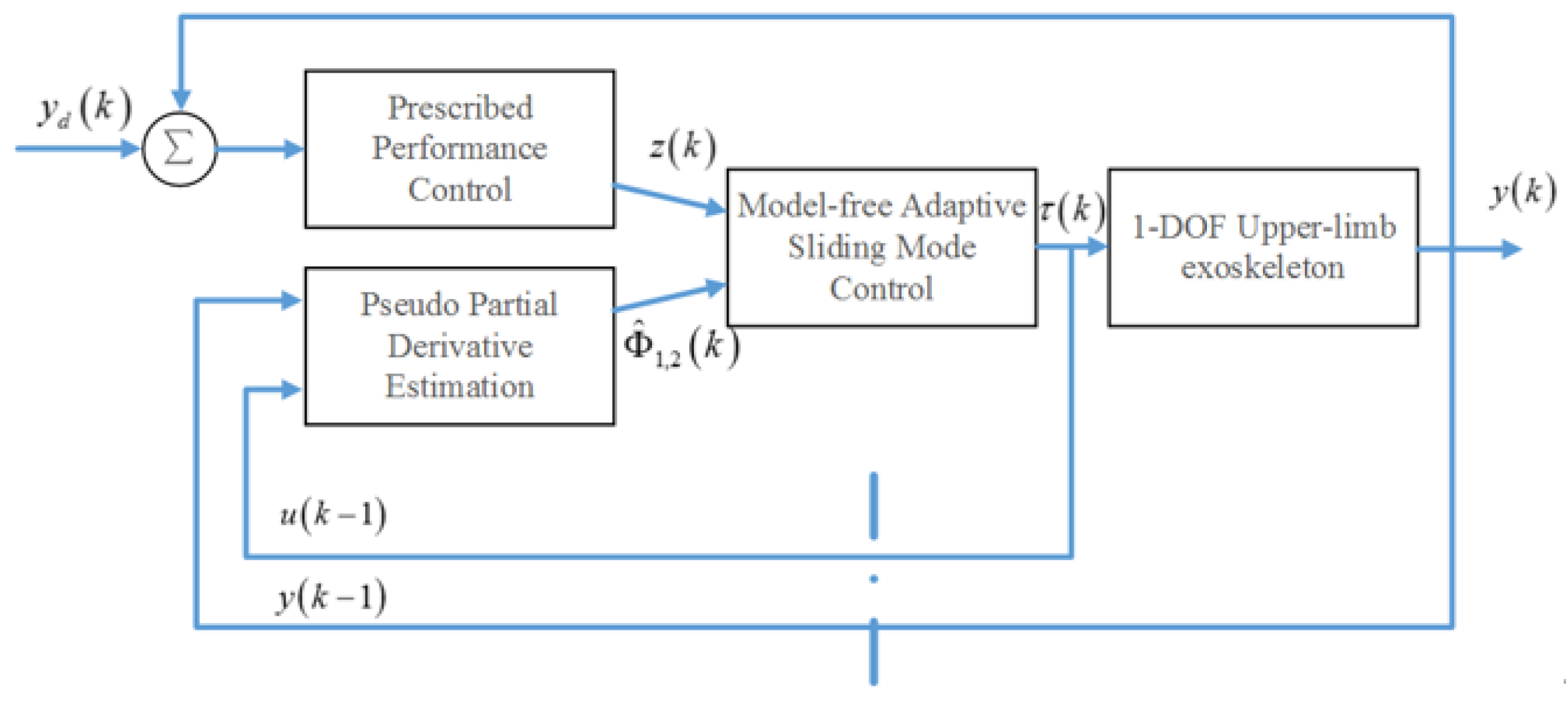
3.1. MFAC-SMC-PP Control Framework
3.2. Dynamic Description and Controller Design
3.3. Stability Analysis
4. Simulation and Experiment
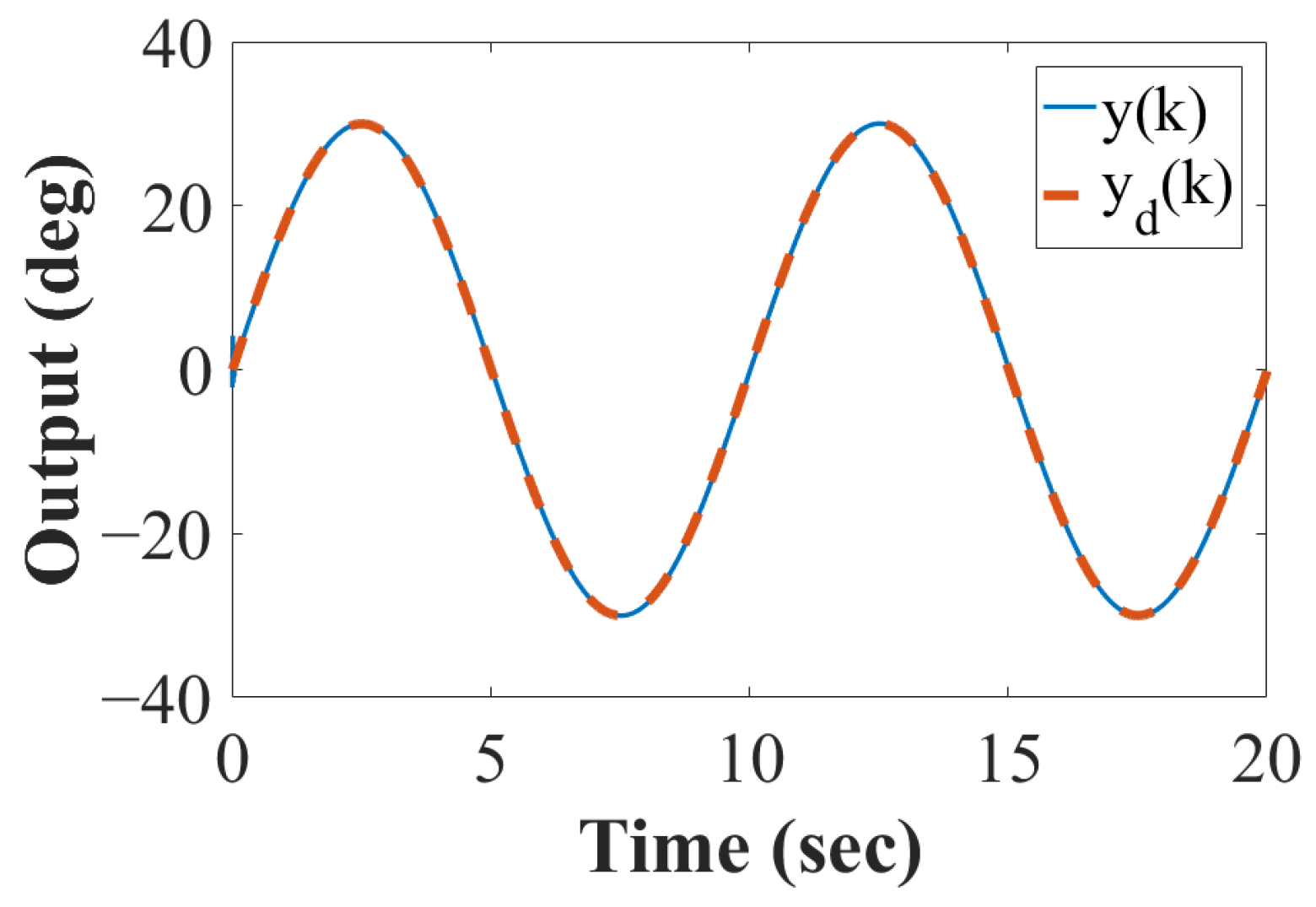
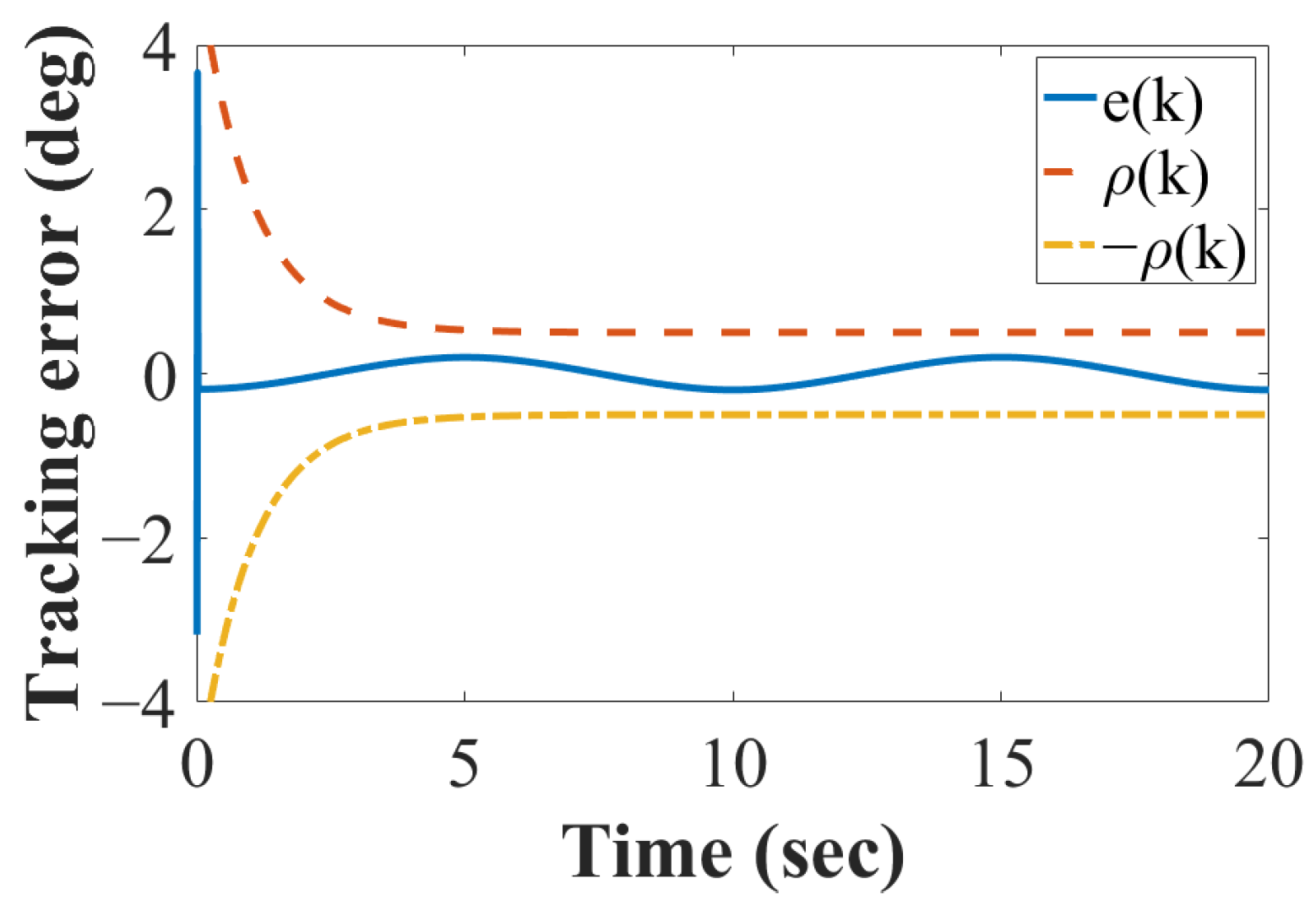
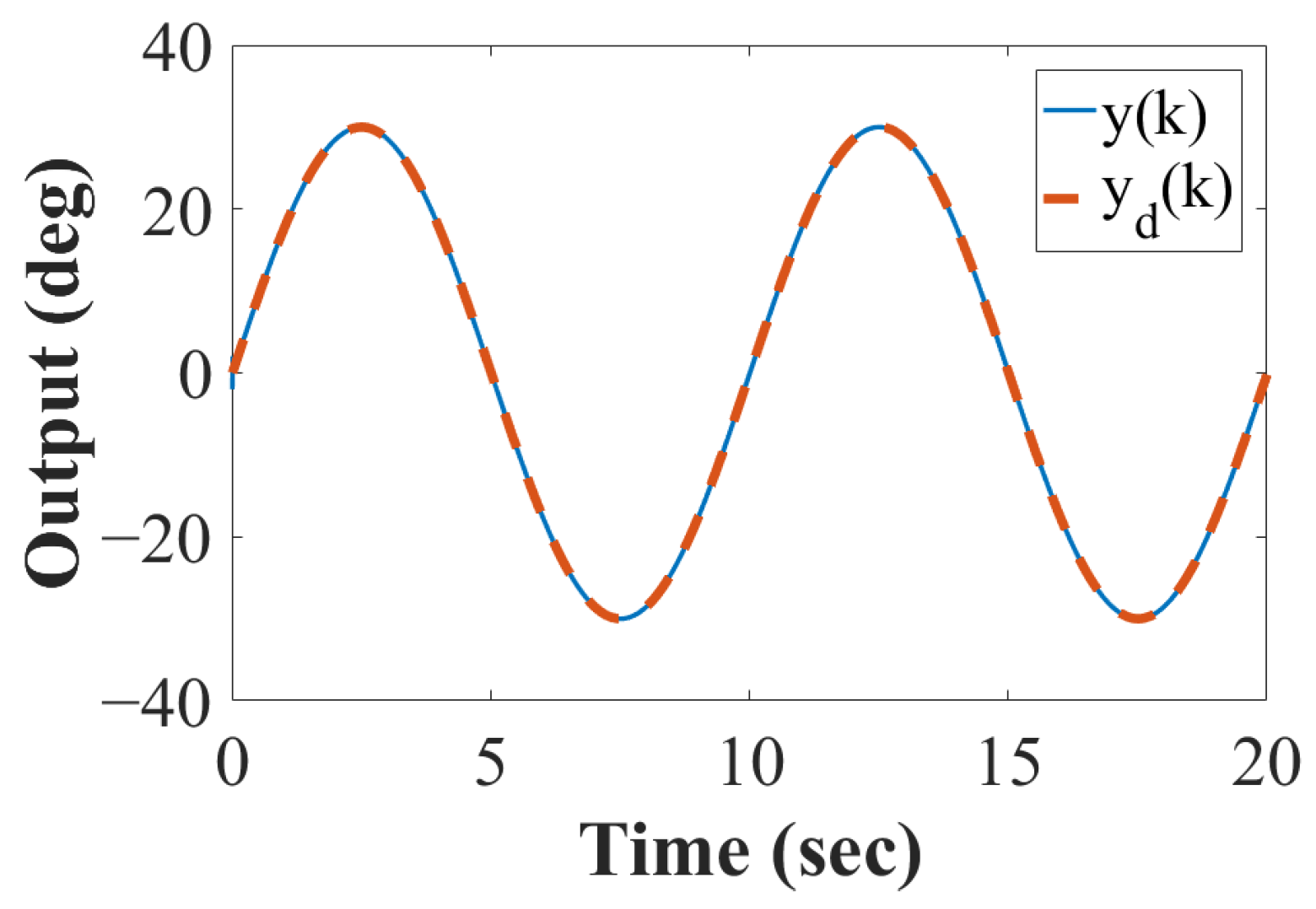
4.1. Simulation
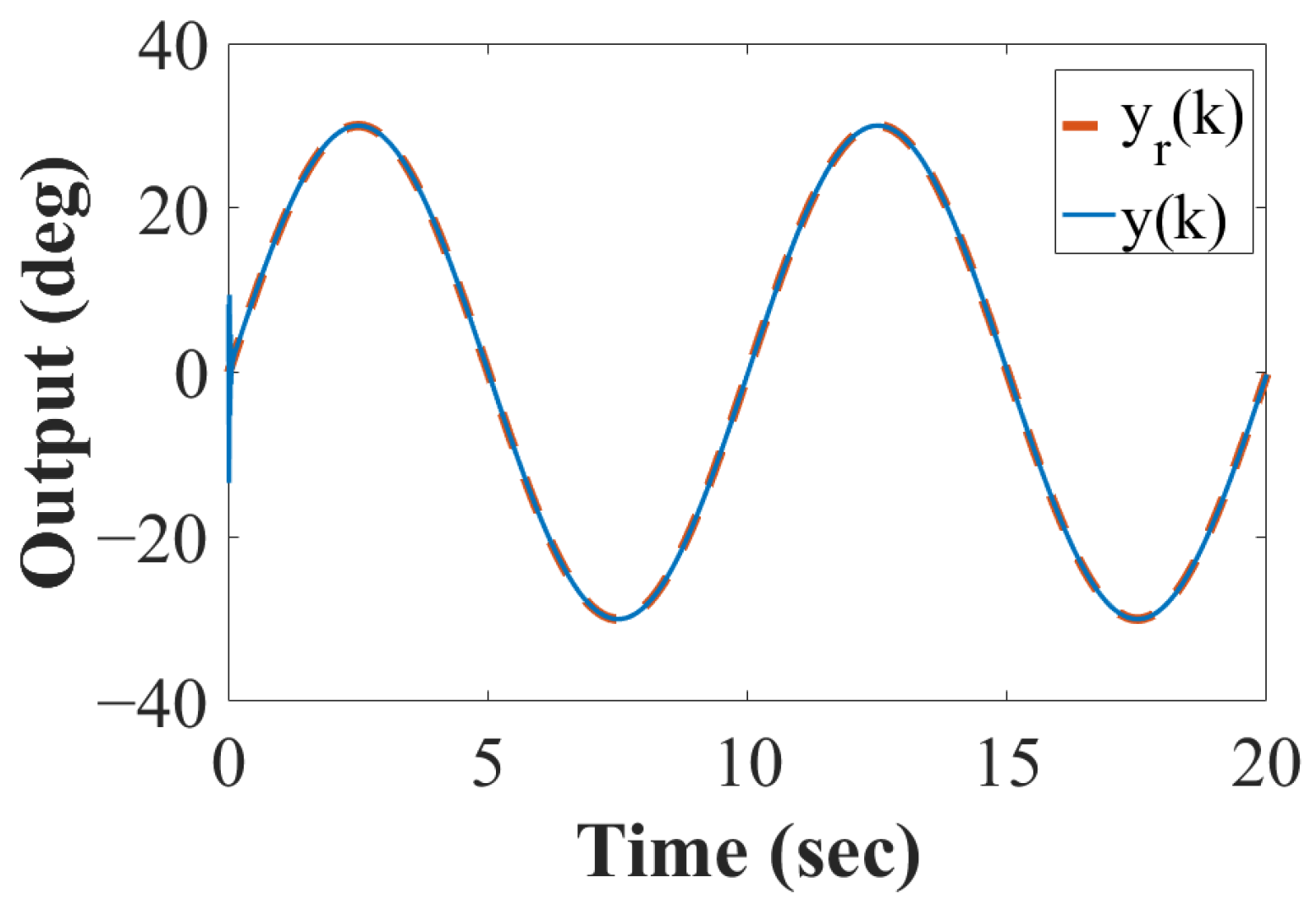
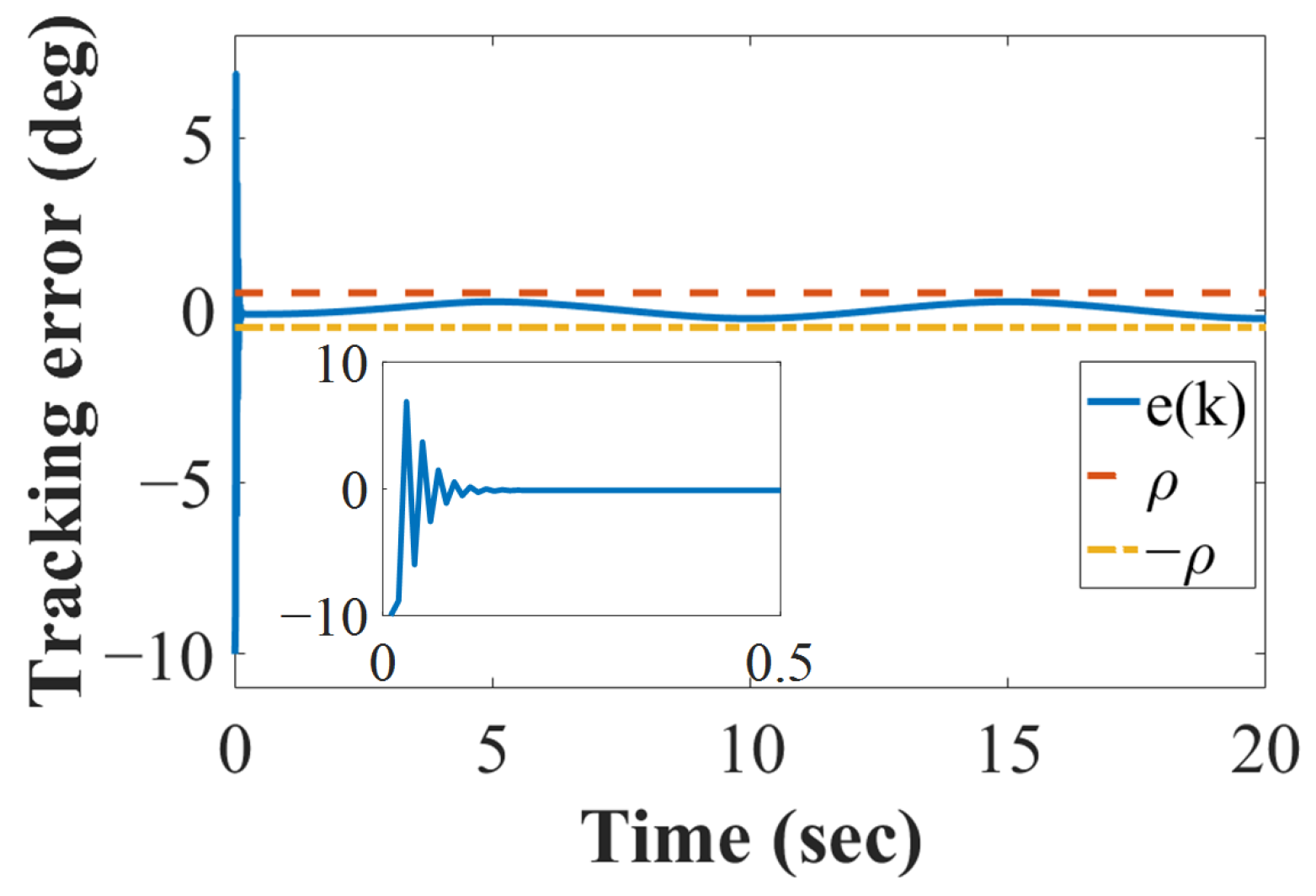
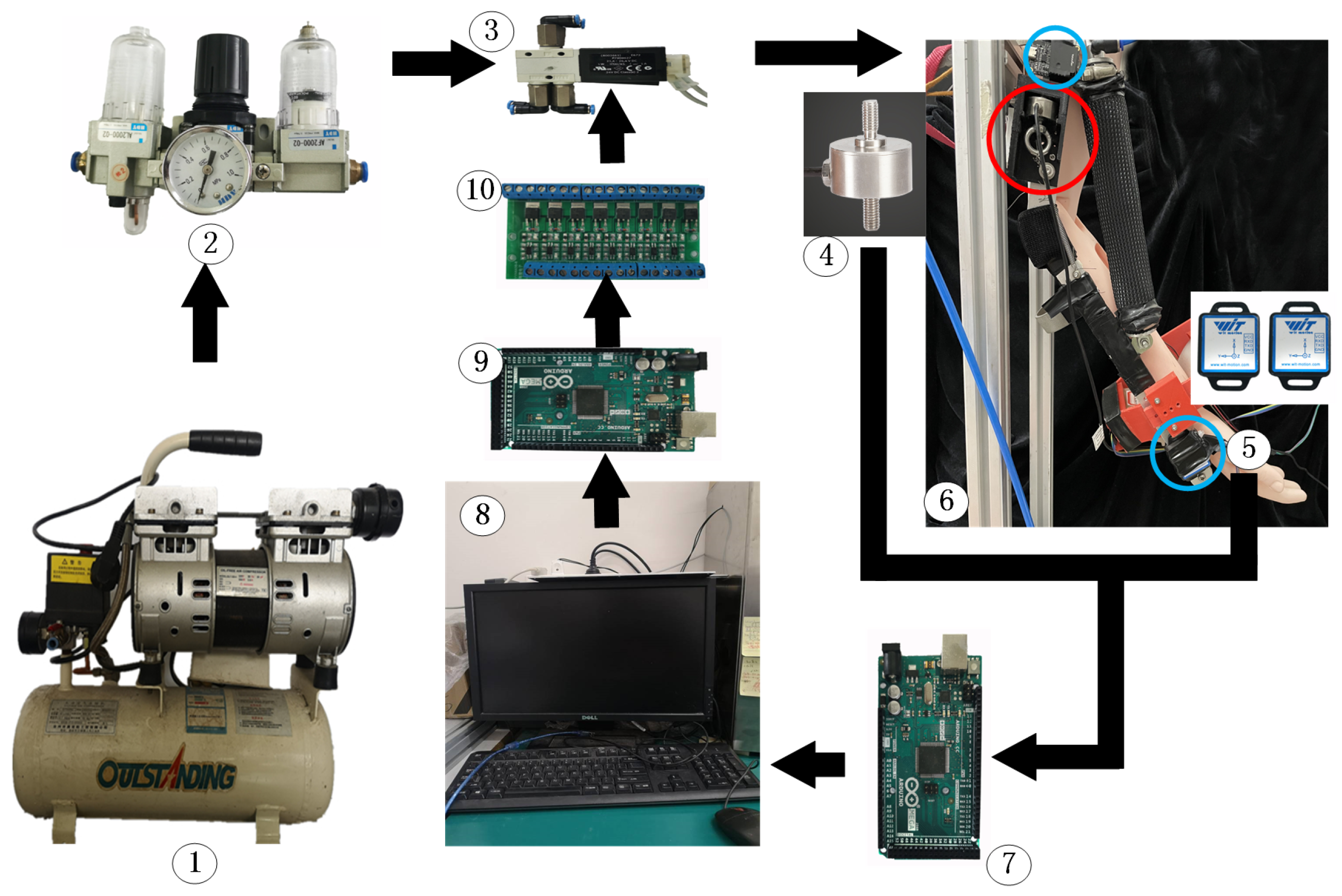
4.2. Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Joel, C.P.; Jacob, R.; Stephen, B. Upper-Limb Powered Exoskeleton Design. IEEE/ASME Trans. Mechatron. 2007, 12, 408–417. [Google Scholar]
- Joudzadeh, P.; Hadi, A.; Tarvirdizadeh, B.; Borooghani, D.; Alipour, K. Design and fabrication of a lower limb exoskeleton to assist in stair ascending. Ind. Robot. 2019, 46, 209–299. [Google Scholar] [CrossRef]
- Lee, H.D.; Lee, B.K.; Kim, W.S.; Han, J.S.; Shin, K.S.; Han, C.S. Human–robot cooperation control based on a dynamic model of an upper limb exoskeleton for human power amplification. Mechatronics 2014, 24, 168–176. [Google Scholar] [CrossRef]
- Tripathy, S.; Panicker, R.; Shrey, S.; Naik, R.; Pachpore, S.S. Voice controlled upper body exoskeleton: A development for industrial application. Int. J. Sci. Technol. Res. 2020, 9, 1032–1037. [Google Scholar]
- Ghan, J.; Kazerooni, H. System identification for the berkeley lower extremity exoskeleton (bleex). In Proceedings of the International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 3477–3484. [Google Scholar]
- Wang, S.; Wang, L.; Meijneke, C.; Asseldonk, E.V.; Hoellinger, T.; Cheron, G. Design and control of the mindwalker exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 277–286. [Google Scholar] [CrossRef]
- Lo, H.S.; Sheng, Q.X. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef]
- Gopura, R.A.R.C.; Kiguchi, K. Development of a 6 DOF Exoskeleton Robot for Human Upper-Limb Motion Assist. In Proceedings of the International Conference on Information and Automation for Sustainability, Colombo, Sri Lanka, 12–14 December 2008; pp. 13–18. [Google Scholar]
- Gupta, A.; Malley, M.K. Design of a Haptic Arm Exoskeleton for Training and Rehabilitation. IEEE/ASME Trans. Mechatron. 2006, 11, 280–289. [Google Scholar] [CrossRef]
- Vitiello, N.; Lenzi, T.; Roccella, S.; De Rossi, S.M.M.; Cattin, E.; Giovacchini, F.; Vecchi, F.; Carrozza, M.C. NEUROExos: A Powered Elbow Exoskeleton for Physical Rehabilitation. IEEE Trans. Robot. 2013, 29, 220–235. [Google Scholar] [CrossRef]
- Wang, X.; Li, X.; Wang, J. Modeling and Identification of the Human-Exoskeleton Interaction Dynamics for Upper Limb Rehabilitation. In Proceedings of the Chinese Intelligent Automation Conference, Beijing, China, 21 March 2015; pp. 51–60. [Google Scholar]
- Brewer, L.; Horgan, F.; Hickey, A.; Williams, D. Stroke rehabilitation: Recent advances and future therapies. QJM Mon. J. Assoc. Phys. 2013, 106, 11–25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, F.; Gao, Y.; Wang, Y.; Zhu, Y.; Zhao, J. Design and evaluation of a 7-DOF cable-driven upper limb exoskeleton. J. Mech. Sci. Technol. 2018, 32, 855–864. [Google Scholar] [CrossRef]
- Zhao, Z.; Hao, L.; Liu, M.; Gao, H.; Li, X. Prescribed performance model-free adaptive terminal sliding mode control for the pneumatic artificial muscles elbow exoskeleton. J. Mech. Sci. Technol. 2021, 35, 3183–3197. [Google Scholar] [CrossRef]
- Tu, X.; Zhou, X.; Li, J.; Su, C.; He, J. Iterative learning control applied to a hybrid rehabilitation exoskeleton system powered by PAM and FES. Clust. Comput. 2017, 20, 2855–2868. [Google Scholar] [CrossRef]
- Kalita, B.; Dwivedy, S.K. Dynamic analysis of pneumatic artificial muscle (PAM) actuator for rehabilitation with principal parametric resonance condition. Nonlinear Dyn. 2019, 97, 2271–2289. [Google Scholar] [CrossRef]
- Gao, X.; Sun, Y.; Hao, L.; Yang, H.; Chen, Y.; Xiang, C. A New Soft Pneumatic Elbow Pad for Joint Assistance With Application to Smart Campus. IEEE Access 2018, 6, 38967–38976. [Google Scholar] [CrossRef]
- Noda, T.; Teramae, T.; Ugurlu, B.; Morimoto, J. Development of an upper limb exoskeleton powered via pneumatic electric hybrid actuators with bowden cable. In Proceedings of the IROS, Chicago, IL, USA, 14–18 September 2014; pp. 3573–3578. [Google Scholar]
- Zhang, J.F.; Yang, C.J.; Chen, Y.; Zhang, Y.; Dong, Y.M. Modeling and control of a curved pneumatic muscle actuator for wearable elbow exoskeleton. Mechatronics 2008, 18, 448–457. [Google Scholar] [CrossRef]
- Kamil, I.; Ondrej, L.; Vladislav, M. Advanced rehabilitation device based on artificial muscle actuators with neural network implementation. J. Autom. Mob. Robot. Intell. Syst. 2012, 6, 30–32. [Google Scholar]
- Jian, H.; Tu, X.; He, J. Design and Evaluation of the RUPERT Wearable Upper Extremity Exoskeleton Robot for Clinical and In-Home Therapies. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 926–935. [Google Scholar]
- Anh, H.; Ahn, K.K. Identification of pneumatic artificial muscle manipulators by a MGA-based nonlinear NARX fuzzy model. Mechatronics 2009, 19, 106–133. [Google Scholar] [CrossRef]
- Sarosi, J. Accurate positioning of pneumatic artificial muscle at different temperatures using LabVIEW based sliding mode controller. In Proceedings of the IEEE International Symposium on Applied Computational Intelligence and Informatics, Timisoara, Romania, 15–17 May 2014; pp. 85–89. [Google Scholar]
- Gao, X.; Li, X.; Zhao, C.; Hao, L.; Xiang, C. Variable stiffness structural design of a dual-segment continuum with independent stiffness and angular position. Robot. Comput. Integr. Manuf. 2021, 67, 102000. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y.; Chen, Y.; Sun, Y.; Hao, L. A novel learning adaptive hysteresis inverse compensator for pneumatic artificial muscles. Smart Mater. Struct. 2019, 29, 015035. [Google Scholar] [CrossRef]
- Chou, C.P.; Hannaford, B. Measurement and modeling of Mckibben pneumatic artificial muscles. IEEE Trans. Robot. Autom. 1996, 12, 90–102. [Google Scholar] [CrossRef] [Green Version]
- Aschemann, H.; Schindele, D. Comparison of model-based approaches to the compensation of hysteresis in the force characteristic of pneumatic muscles. IEEE Trans. Ind. Electron. 2014, 61, 3620–3629. [Google Scholar] [CrossRef]
- Vo-Minh, T.; Tjahjowidodo, T.; Ramon, H.; Brussel, H.V. A new approach to modeling hysteresis in a pneumatic artificial muscle using the maxwell-slip model. IEEE/ASME Trans. Mechatron. 2011, 16, 177–186. [Google Scholar] [CrossRef]
- Ugurlu, B.; Forni, P.; Doppmann, C.; Sariyildiz, E.; Morimoto, J. Stable control of force, position, and stiffness for robot joints powered via pneumatic muscles. IEEE Trans. Ind. Inform. 2019, 15, 6270–6279. [Google Scholar] [CrossRef]
- Hassan, T.; Cianchetti, M.; Moatamedi, M.; Mazzolai, B.; Laschi, C.; Dario, P. Finite-Element Modeling and Design of a Pneumatic Braided Muscle Actuator With Multifunctional Capabilities. IEEE/ASME Trans. Mechatron. 2019, 24, 109–119. [Google Scholar] [CrossRef]
- Robinson, R.M.; Kothera, C.S.; Wereley, N.M. Nonlinear analysis of quasi-static response of pneumatic artificial muscles for agonistic and antagonistic actuation modes. In Proceedings of the SPIE Bioinspiration, Biomimetics, and Bioreplication, San Diego, CA, USA, 11–13 March 2013; pp. 796–809. [Google Scholar]
- Wickramatunge, K.C.; Leephakpreeda, T. Study on mechanicalbehaviors of pneumatic artificial muscle. Int. J. Eng. Sci. 2010, 48, 188–198. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, J. Neural-network-based nonlinear model predictive tracking control of a pneumatic muscle actuator-driven exoskeleton. IEEE J. Autom. Sin. 2013, 7, 1478–1488. [Google Scholar] [CrossRef]
- Gao, X.; Li, X.; Sun, Y.; Hao, L.; Yang, H.; Xiang, C. Model-free tracking control of continuum manipulators with global stability and assigned accuracy. IEEE Trans. Syst. Man Cybern. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Liang, G.; Ye, W.; Xie, Q. PID control for the robotic exoskeleton: Application to lower extremity rehabilitation. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 2345–2350. [Google Scholar]
- Roy, R.; Islam, M.; Rashid, M.; Mounis, S.; Ahsan, M.M.; Ahad, M.T.; Siddique, Z.; Kouzani, A.Z.; Mahmud, M.A.P. Investigation of 2DOF PID Controller for Physio-Therapeutic Application for Elbow Rehabilitation. Appl. Sci. 2021, 11, 8617. [Google Scholar] [CrossRef]
- Zawawi, M.; Elamvazuthi, I.; Aziz, A.; Da Ud, S.A. Comparison of PID and fuzzy logic controller for DC servo motor in the development of lower extremity exoskeleton for rehabilitation. In Proceedings of the IEEE International Symposium in Robotics and Manufacturing Automation, Kuala, Lumpur, 19–21 September 2017; pp. 1–6. [Google Scholar]
- Liu, M.; Zhao, Z.; Hao, L. Prescribed performance model-free adaptive sliding mode control of a shape memory alloy actuated system. ISA Trans. 2021, in press. [Google Scholar]
- Hou, Z.S.; Wang, Z. From model-based control to data-driven control: Survey, classification and perspective. Inf. Sci. 2013, 235, 3–35. [Google Scholar] [CrossRef]
- Wang, Y.; Hou, M. Model-free adaptive integral terminal sliding mode predictive control for a class of discrete-time nonlinear systems. ISA Trans. 2019, 93, 209–217. [Google Scholar] [CrossRef]
- Yang, H.; Xiang, C.; Hao, L.; Zhao, L.; Xue, B. Research on PSA-MFAC for a novel bionic elbow joint system actuated by pneumatic artificial muscles. J. Mech. Sci. Technol. 2017, 31, 3519–3529. [Google Scholar] [CrossRef]
- Espinoza-Fraire, T.; Saenz, A.; Salas, F.; Juarez, R.; Giernacki, W. Trajectory Tracking with Adaptive Robust Control for Quadrotor. Appl. Sci. 2021, 11, 8571. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, J.; Fang, X.; Zhu, X. Data-driven model-free adaptive sliding mode control for the multi degree-of-freedom robotic exoskeleton. Inf. Sci. 2016, 327, 246–257. [Google Scholar]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Liu, D.; Yang, G. Data-Driven Adaptive Sliding Mode Control of Nonlinear Discrete-Time Systems With Prescribed Performance. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2598–2604. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Teramae, T.; Noda, T.; Hyon, S.H.; Morimoto, J. Modeling and control of a Pneumatic-Electric hybrid system. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Tokyo, Japan, 3–8 November 2013; pp. 4887–4892. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Xiao, J.; Jia, H.; Zhang, H.; Hao, L. Prescribed Performance Control for the Upper-Limb Exoskeleton System in Passive Rehabilitation Training Tasks. Appl. Sci. 2021, 11, 10174. https://doi.org/10.3390/app112110174
Zhao Z, Xiao J, Jia H, Zhang H, Hao L. Prescribed Performance Control for the Upper-Limb Exoskeleton System in Passive Rehabilitation Training Tasks. Applied Sciences. 2021; 11(21):10174. https://doi.org/10.3390/app112110174
Chicago/Turabian StyleZhao, Zhirui, Jichun Xiao, Hongyun Jia, Hang Zhang, and Lina Hao. 2021. "Prescribed Performance Control for the Upper-Limb Exoskeleton System in Passive Rehabilitation Training Tasks" Applied Sciences 11, no. 21: 10174. https://doi.org/10.3390/app112110174
APA StyleZhao, Z., Xiao, J., Jia, H., Zhang, H., & Hao, L. (2021). Prescribed Performance Control for the Upper-Limb Exoskeleton System in Passive Rehabilitation Training Tasks. Applied Sciences, 11(21), 10174. https://doi.org/10.3390/app112110174