
A Novel Adaptive Approach for Autonomous Vehicle Based on Optimization Technique for Enhancing the Communication between Autonomous Vehicle-to-Everything through Cooperative Communication


Abstract
:1. Introduction
- The proposed adaptive approach develops an efficient method to enhance the connectivity between AV2X by applying a method assisted by V2V communications.
- An optimization problem to ascertain that the communication between AV2X is reliable, and to achieve the required system QoS was formulated.
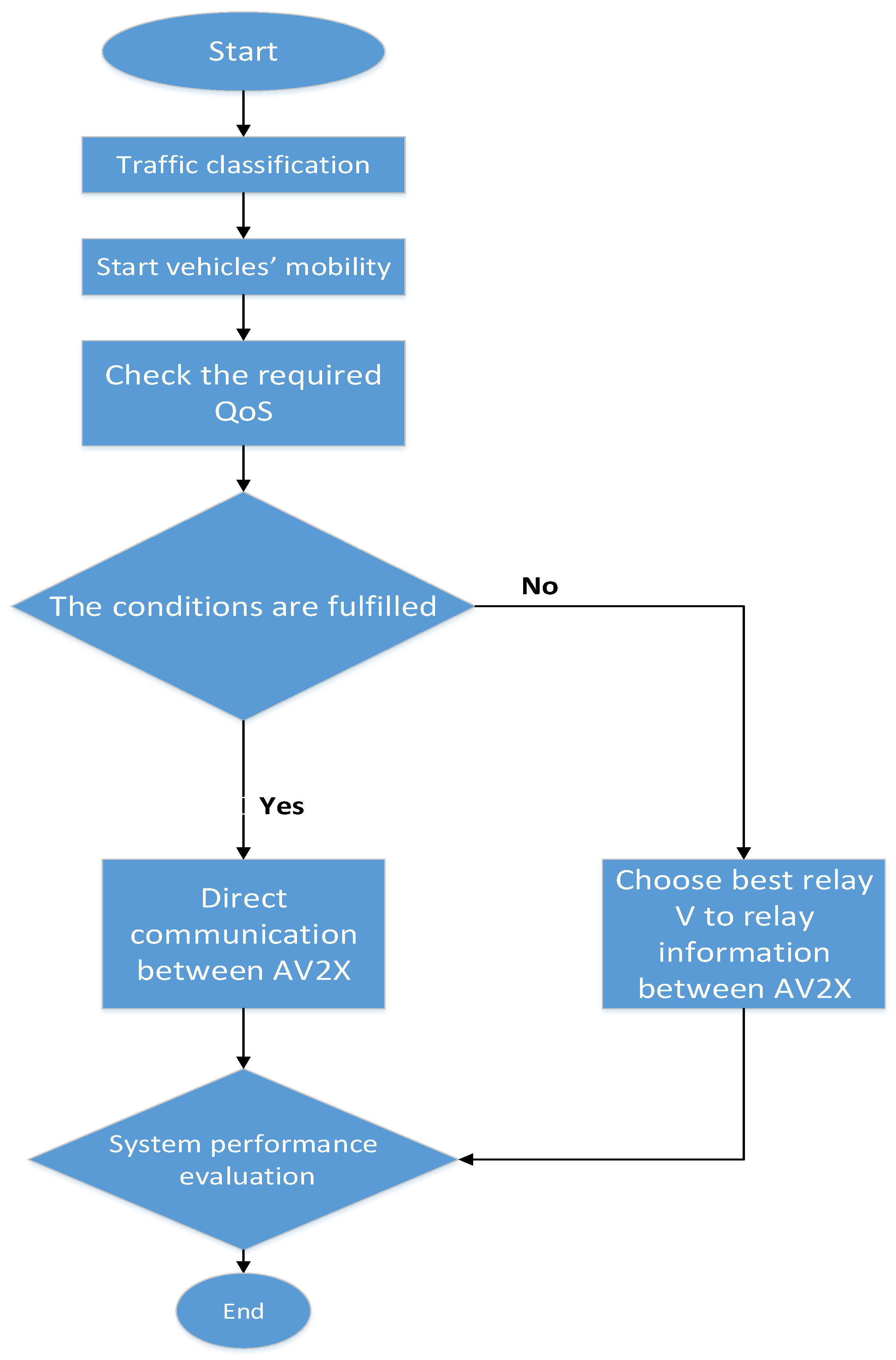
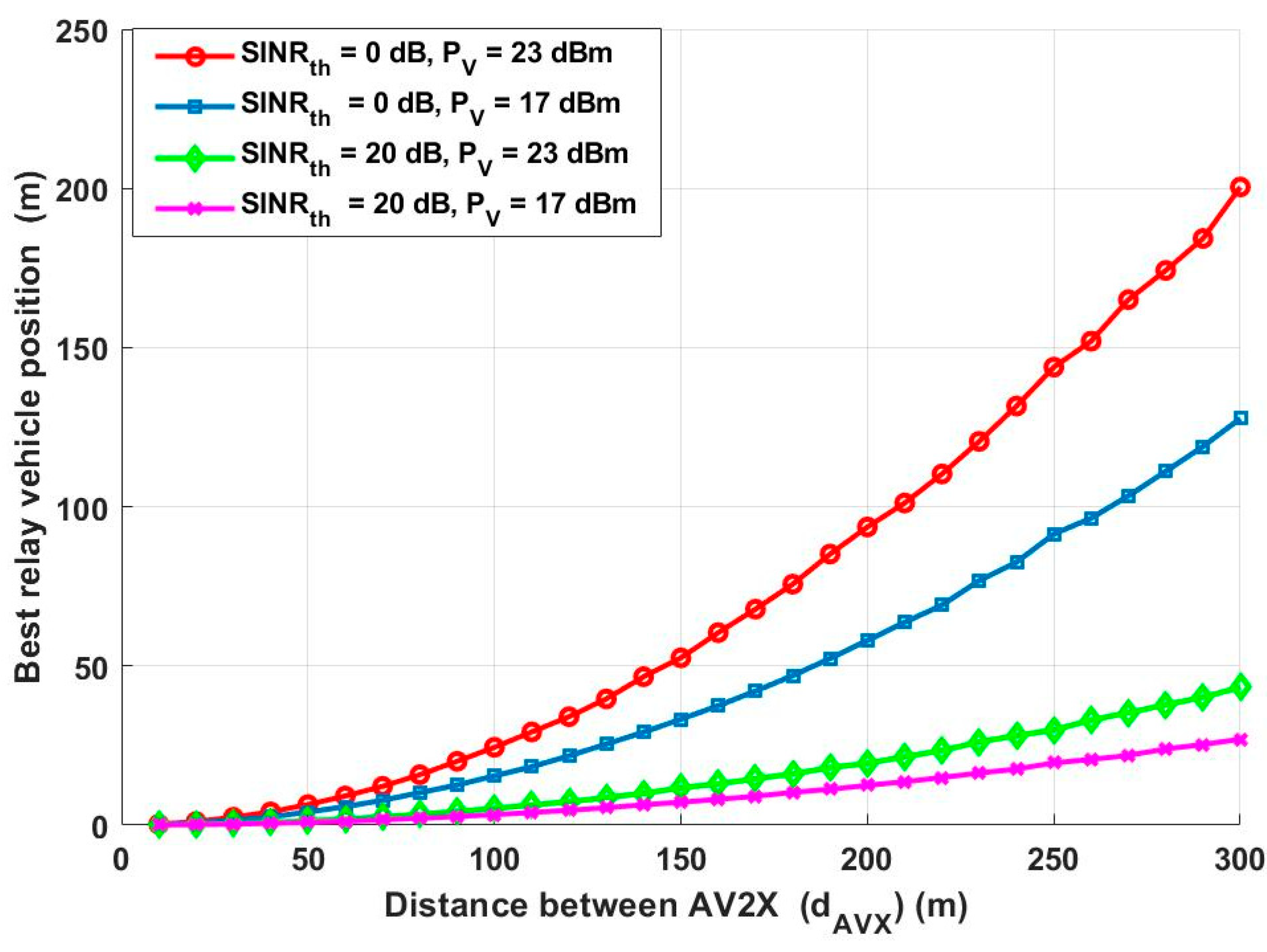
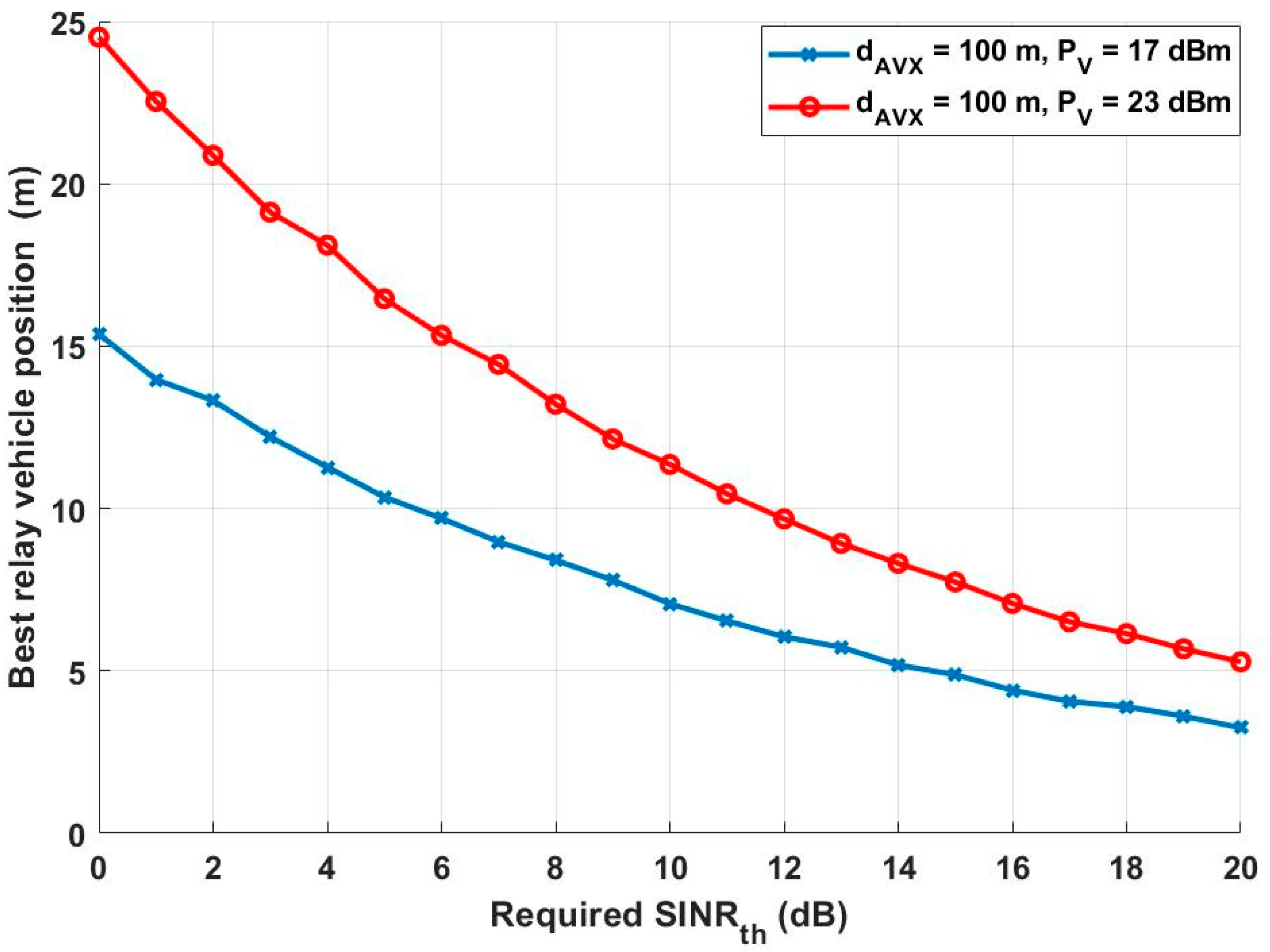
- Based on the required QoS, the AV was used to decide whether to reach the destination through the direct link or through cooperative communication by finding the optimum position of the relay-vehicle. This enables determination of the required distance between AV2X to fulfil the required QoS.
- The proposed adaptive model was evaluated in terms of throughput, packet loss rate, packet delivery ratio and average delivery latency for the vehicular communication under different conditions, such as transmission power, and channel condition (path loss exponent), interference, vehicle mobility, vehicle density and vehicle speed. These findings can optimize the system performance for the whole network in a vibrant environment. This can be achieved by finding the optimum inter-vehicle position to communicate with the autonomous vehicle (AV) or to relay information to everything.
2. Literature Review
3. Proposed Model and Problem Formulation
3.1. System Model
3.2. Problem Formulation
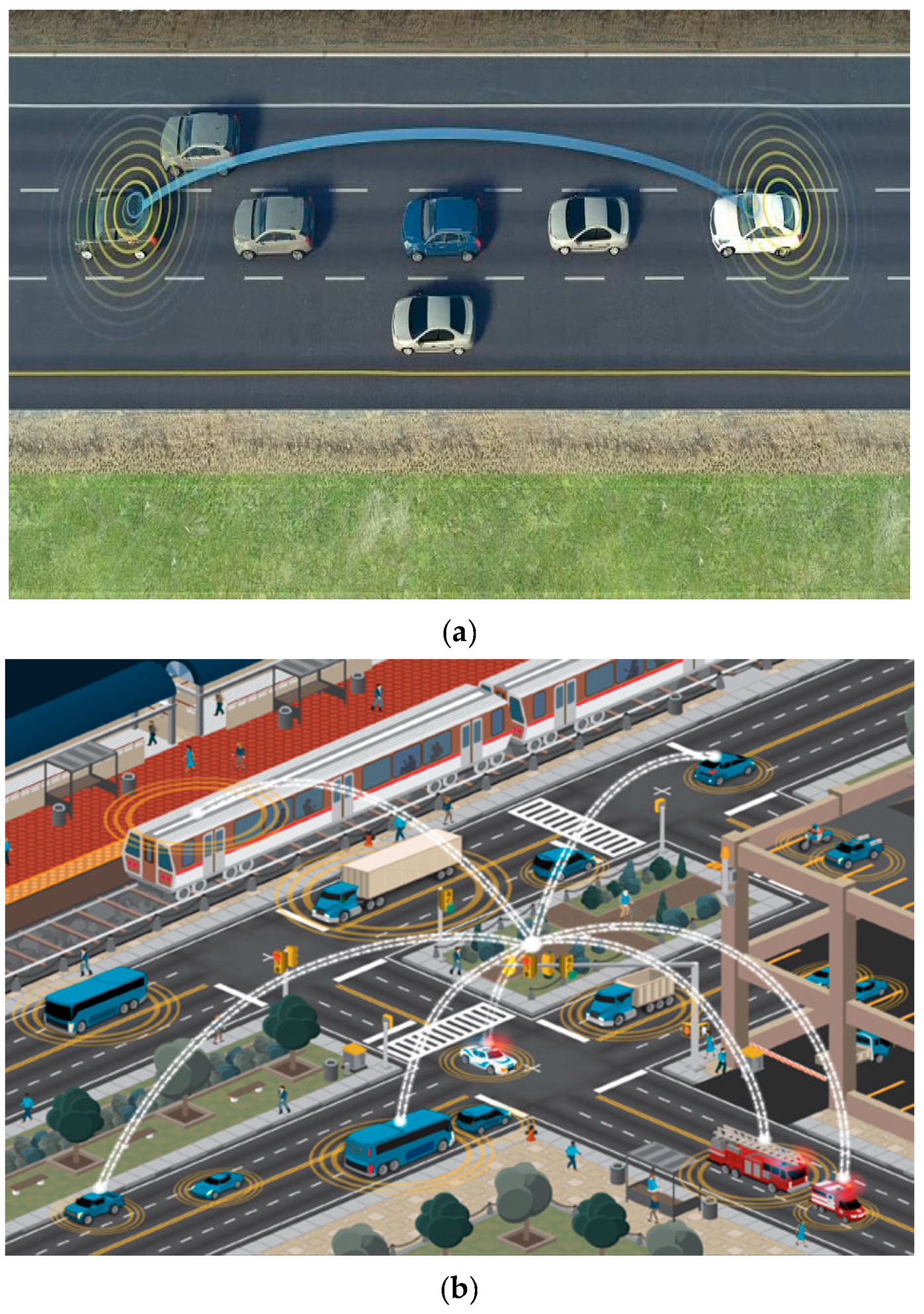
3.3. Vehicle Communication Scenario
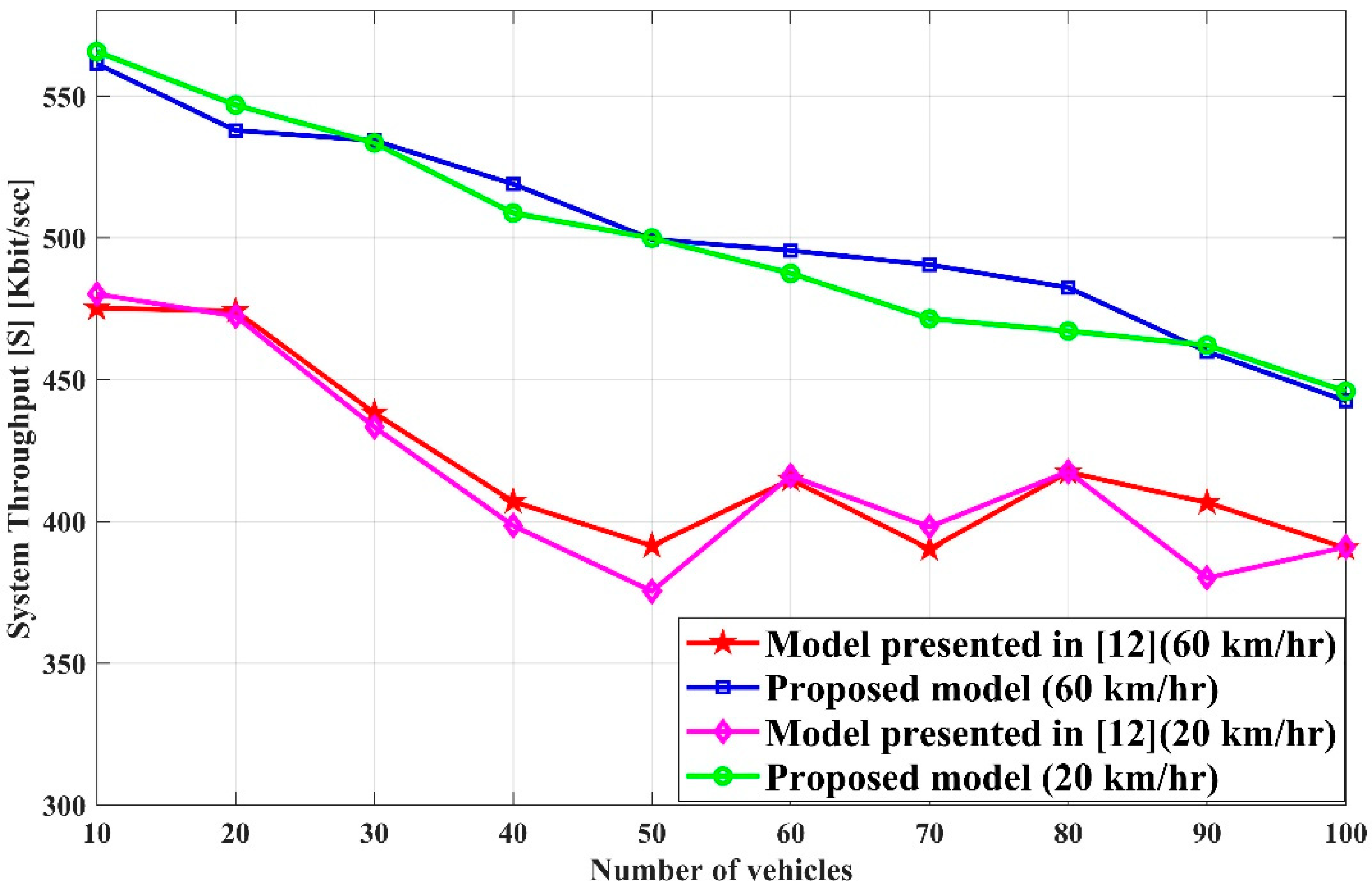
- Throughput (S): the number of the successful received packets from any source to any destination in a unit time. Throughput is usually represented in bit per second (bit/s or bps). For the proposed model, the throughput can be expressed by the following formula [34]:
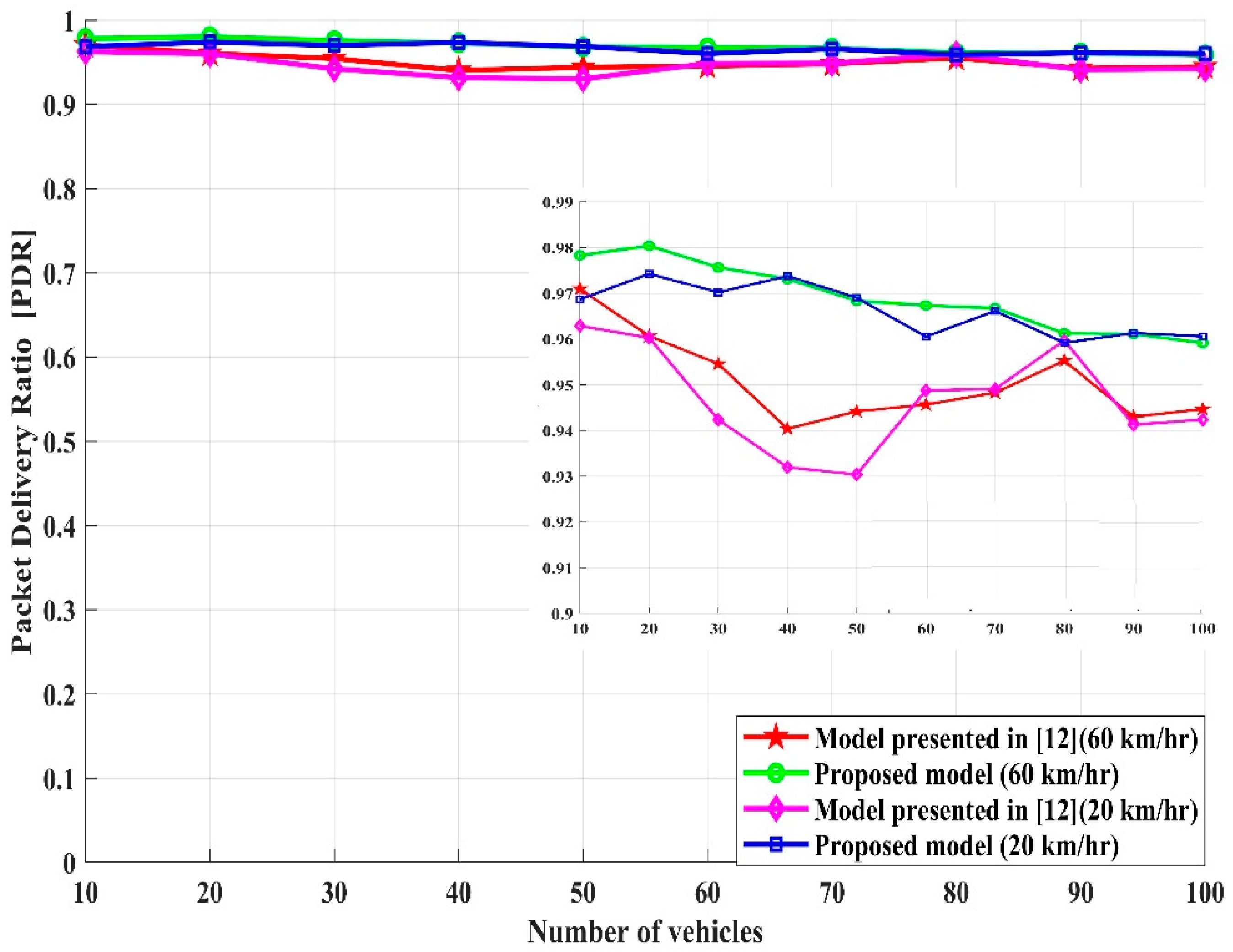
- Packet delivery ratio (PDR): the ratio of the number of successfully received packets by the destinations to those generated by the sources. The increment of successful packet received by the destination nodes relative to the number of packets sent by the source nodes reflects how reliable and efficient the network is. Thus, PDR can be expressed as [34]:
- Packet loss rate (PLR): packet loss rate occurs when the destination fails to receive one or more pieces of transmitted information travelling across a network. It is typically caused by the physical channel of the wireless network, or due to network congestion. Then, the packet loss rate can be calculated mathematically as the percentage of packets lost with respect to packets sent. The percentage of packets lost is measured as the difference between the numbers of sent packets and received packets. Thus, it is defined by the following equation [35]:
- Average delivery latency (DL): the word latency is an important term that should be used to indicate any kind of delay in the network. Additionally, it can be defined as the total time taken by the transmitted data packet from one node to reach another node over a network; it is also called the network average-end-to-end-delay. Thus, the average delivery latency can be measured as the sum of the amount of time spent from the beginning of the transmission until the successful delivery of the packets at the destination over the total number of received packets by the destination [34]:
4. Numerical Results and Discussion
5. Conclusions and Suggestion for Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Symbols
| System bandwidth | |
| The bandwidth of the uplink channel between autonumous vehicle-to-vehicle | |
| The bandwidth of the uplink channel between vehicle-to-everyhing | |
| C1,C2,C3 | Lagrangian optimization constraints |
| D | Road length |
| DL | Average delivery latency |
| dAVX | Distance between autonomous vehicle and everything |
| dAV1 | Distance between autonomous vehicle and relay-vehicle |
| dV1X | Distance between relay-vehicle and everything |
| G | Number of vehicle |
| Fading channel coefficient between autonomous vehicle-relay-vehicle | |
| Fading channel coefficient between autonomous vehicle-everything | |
| Fading channel coefficient between rely-vehicle-everything | |
| Fading co-channel interference at the destination due to AVX link | |
| Fading co-channel interference at the destination due to relay-vehicle-destination link | |
| Fading channel coefficient between any source-destination | |
| Complex Gaussian random variable to model fading phenomena | |
| Interference at trsnsmission link between autonomous vehicle-everything | |
| Interference at trsnsmission link between relay-vehicle-everything | |
| Interference at trsnsmission link between autonomous vehicle-relay-vehicle | |
| Noise power spectral density | |
| ρ | Density of vehicle |
| PDR | Packet delivery ratio |
| PLR | Packet loss rate |
| PLSD | Path loss of S-D link |
| PLAVV1 | Path loss between autonomous vehicle and relay-vehicle |
| PLAVX | Path loss between autonomous vehicle any destination |
| PLV1X | Path loss between relay-vehicle and any destination |
| PV | Transmitted power of any vehicle or autonomous vehicle |
| PVmax | Maximum transmitted power of any vehicle or autonomous vehicle |
| PIk | Interference transmission power of the devices which share AVX link |
| PIr | Interference transmission power of the devices which share relay-vehicle-destination link |
| PLo | Path loss constant |
| q | The weight position of the inter-vehicles |
| Data rate between autonomous vehicle and relay-vehicle | |
| Data rate between autonomous vehicle and everything | |
| Data rate between relay-vehicle and relay-vehicle | |
| Overalll system data rate | |
| S | Throughput |
| Signal-to-interference-plus-noise-ratio -threshold | |
| Maximum required signal-to-interference-plus-noise for AVX link | |
| Total signal-to-interference-plus-noise-ratio from AVX link and V1X link | |
| Signal-to-interference-plus-noise-ratio from AVV1 link | |
| ζ, μ, λ | Non-negative Lagrangian multipliers |
| α | Path loss exponent |
| δ | Tolerance variation in vehicle speed |
References
- Guevara, L.; Cheein, F.A. The Role of 5G Technologies: Challenges in Smart Cities and Intelligent Transportation Systems. Sustainability 2020, 12, 6469. [Google Scholar] [CrossRef]
- Gohar, A.; Nencioni, G. The Role of 5G Technologies in a Smart City: The Case for Intelligent Transportation System. Sustainability 2021, 13, 5188. [Google Scholar] [CrossRef]
- Galarza, M.; Paradells, J. Improving road safety and user experience by employing dynamic in-vehicle information systems. IET Intell. Transp. Syst. 2019, 13, 738–744. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef]
- Wu, X.; Subramanian, S.; Guha, R.; White, R.G.; Li, G.; Lu, K.W.; Bucceri, A.; Zhang, T. Vehicular communications using DSRC: Challenges, enhancements, and evolution. IEEE J. Sel. Area Commun. 2013, 31, 399–408. [Google Scholar]
- Yang, Y.; Fei, D.; Dang, S. Inter-Vehicle Cooperation Channel Estimation for IEEE 802.11p V2I Communications. IEEE Commun. Netw. 2017, 19, 227–238. [Google Scholar] [CrossRef]
- Vinel, A.; Lyamin, N.; Isachenkov, P. Modeling of V2V Communications for C-ITS Safety Applications: A CPS Perspective. IEEE Commun. Lett. 2018, 22, 1600–1603. [Google Scholar] [CrossRef]
- Wang, R.; Xu, Z.; Zhao, X.; Hu, J. V2V-based method for detection of road traffic congestion. IET Intell. Transp. Syst. 2019, 13, 880–885. [Google Scholar] [CrossRef]
- Yang, L.; Li, H. Vehicle-to-vehicle communication based on a peer-to-peer network with graph theory and consensus algorithm. IET Intell. Transp. Syst. 2019, 13, 280–285. [Google Scholar] [CrossRef]
- Chen, J.; Mao, G.; Li, C.; Zafar, A.; Zomaya, A.Y. Throughput of Infrastructure-Based Cooperative Vehicular Networks. IEEE Trans. Int. Trans. Syst. 2017, 18, 2964–2979. [Google Scholar] [CrossRef] [Green Version]
- Abbas, F.; Fan, P.; Khan, Z. A novel reliable low-latency multipath routing scheme for vehicular ad hoc networks. EURASIP J. Wirel. Commu. Net. 2018, 1, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Osman, R.A.; Peng, X.-H.; Omar, M.A. Adaptive cooperative communications for enhancing QoS in vehicular networks. Phys. Commun. 2019, 34, 285–294. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Mao, G.; Li, C.; Liang, W.; Zhang, D.-g. Capacity of Cooperative Vehicular Networks with Infrastructure Support: Multiuser Case. IEEE Trans. Veh. Commun. 2018, 67, 1546–1560. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Wang, X.; Cui, Z. Survey on cooperatively V2X downloading for intelligent transport systems. IET Intell. Transp. Syst. 2019, 13, 13–21. [Google Scholar] [CrossRef]
- Haque, K.F.; Abdelgawad, A.; Yanambaka, V.P.; Yelamarthi, K. LoRa Architecture for V2X Communication: An Experimental Evaluation with Vehicles on the Move. Sensors 2020, 20, 6876. [Google Scholar] [CrossRef] [PubMed]
- Ge, X.; Cheng, H.; Mao, G.; Denis, B.; Raulefs, R.; Wymeersch, H. Implicit Cooperative Positioning in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3964–3979. [Google Scholar]
- Xiao, H.; Chen, Y.; Zhang, Q.; Chronopoulos, A.T.; Zhang, Z.; Ouyang, S. Joint Clustering and Power Allocation for the Cross Roads Congestion Scenarios in Cooperative Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2267–2277. [Google Scholar] [CrossRef]
- Zhang, L. Cooperative adaptive cruise control in mixed traffic with selective use of vehicle-to-vehicle communication. IET Intell. Transp. Syst. 2018, 12, 1243–1254. [Google Scholar] [CrossRef]
- Celes, C.; Silva, F.A.; Boukerche, A.; de Castro Andrade, R.M.; Loureiro, A.A. Improving VANET Simulation with Calibrated Vehicular Mobility Traces. IEEE Trans. Mob. Comput. 2017, 16, 3376–3389. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, K.; Gan, C. The Vehicle-To-Vehicle Link Duration Scheme Using Platoon-Optimized Clustering Algorithm. IEEE Access 2019, 7, 78584–78596. [Google Scholar] [CrossRef]
- Trien, L.T.; Adachi, K.; Yamao, Y. Packet relay-assisted V2V communication with sectorised relay station employing payload combining scheme. IET Commun. 2018, 12, 458–465. [Google Scholar] [CrossRef]
- Madasamy, B.; Balasubramanian, P. Geographical angular zone-based optimal resource allocation and efficient routing protocols for vehicular ad hoc networks. IET Intell. Transp. Syst. 2018, 12, 242–250. [Google Scholar] [CrossRef]
- Jiang, F.; Li, C.; Gong, Z. Low Complexity and Fast Processing Algorithms for V2I Massive MIMO Uplink Detection. IEEE Trans. Veh. Technol. 2018, 67, 5054–5068. [Google Scholar] [CrossRef]
- Benabdallah, F.; Hamza, A.; Becherif, M. On the use of non-orthogonal multiple access for V2V message dissemination. IET Intell. Transp. Syst. 2019, 13, 1125–1129. [Google Scholar] [CrossRef]
- Feteiha, M.F.; Ahmed, M.H. Multihop Best-Relay Selection for Vehicular Communication over Highways Traffic. IEEE Trans. Veh. Technol. 2018, 67, 9845–9855. [Google Scholar] [CrossRef]
- Osman, R.A.; Zaki, A.I.; Abdelsalam, A.K. Novel Road Traffic Management Strategy for Rapid Clarification of the Emergency Vehicle Route Based on V2V Communications. Sensors 2021, 21, 5120. [Google Scholar] [CrossRef] [PubMed]
- Road Engineering Design Guidelines, Lane Width Guideline (City of Toronto, Transportation Services, June 2017). pp. 1–11. Available online: https://www.toronto.ca/ (accessed on 6 September 2021).
- CEDR Report. Safe Distance between Vehicles (La Grande Arche, Sud 19, April 2010). pp. 1–9.
- Wang, S.; Wang, D.; Li, C.; Xu, W. Full Duplex AF and DF Relaying Under Channel Estimation Errors for V2V Communications. IEEE Access 2018, 6, 65321–65332. [Google Scholar] [CrossRef]
- Kiela, K.; Barzdenas, V.; Jurgo, M.; Macaitis, V.; Rafanavicius, J.; Vasjanov, A.; Kladovscikov, L.; Navickas, R. Review of V2X–IoT Standards and Frameworks for ITS Applications. Appl. Sci. 2020, 10, 4314. [Google Scholar] [CrossRef]
- Wang, Y.; Sheng, M.; Wang, X.; Wang, X.; Wang, L.; Li, J. Mobile-edge computing: Partial computation offloading using dynamic voltage scaling. IEEE Trans. Commun. 2016, 64, 4268–4282. [Google Scholar] [CrossRef]
- Alkhalifa, I.S.; Almogren, A.S. Performance Analysis of Cooperative Relaying Systems with Power-Domain Non-Orthogonal Multiple Access. IEEE Access 2018, 6, 39839–39848. [Google Scholar]
- Wei, L.; Hu, R.Q.; Qian, Y.; Wu, G. Energy efficiency and spectrum efficiency of multihop device-to-device communications underlaying cellular networks. IEEE Trans. Veh. Technol. 2016, 65, 367–380. [Google Scholar] [CrossRef]
- Alkhalifa, I.S.; Almogren, A.S. NSSC: Novel Segment Based Safety Message Broadcasting in Cluster-Based Vehicular Sensor Network. IEEE Access 2020, 8, 34299–34312. [Google Scholar] [CrossRef]
- Da Silva, C.A.G.; Pedroso, C.M. MAC-Layer Packet Loss Models for Wi-Fi Networks: A Survey. IEEE Access 2019, 7, 180512–180531. [Google Scholar] [CrossRef]
- Cao, Y.; Sun, Z. Geographic based spray and relay (GSAR): An efficient routing scheme for DTNs. IEEE Trans. Veh. Technol. 2015, 64, 1548–1564. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Adopted Technique | Optimization Problem | System Evaluation Metric | Investigation Scenario | |
|---|---|---|---|---|
| [12] | Cooperative communications for a combined V2I with V2V approach. | Minimizing the total energy consumed per bit given an outage probability target, or maximizing the end-to-end throughput. |
|
|
| [13] | Cooperative communication for a combined use of V2I and V2V. | Maximizing average data rate. | Capacity achieved. | Vehicles assist the transmission between V2I. |
| [15] | Cooperative caching approach with mobility prediction in vehicular named data networking. | N/A |
| Communication among vehicles using intra-cluster and inter-cluster communication over vehicle clusters. |
| [16] | Implicit cooperative positioning algorithm that exploits the V2V connectivity. | N/A | The vehicle location accuracy. | Direct communication between V2V and between neighbors such as people, traffic light and vehicles. |
| [17] | Cooperative communication between V2V. | Optimization power allocation strategy. | Outage probability. | Communication among vehicles through cluster heads. |
| [18] | Cooperative adaptive cruise control (CACC). | N/A |
| Direct communication between V2V. |
| [20] | Clustering algorithms. | Platoon-optimized clustering. |
| Direct communication between V2V. |
| [21] | Sectorised relay-assisted V2V communications. | N/A |
|
|
| [22] | Relaxed approximation-based SDP. | N/A |
| Direct communication between V2V and between vehicles to roadsides. |
| [23] | Massive multiple-input multiple-output (MIMO). | N/A |
| Direct communication between V2V and between vehicles to roadsides. |
| [24] | Non-orthogonal multiple access technique. | N/A |
| Communication between V2I using relay-vehicles. |
| [25] | Multihop relaying into vehicular communication in highways. | N/A |
| Multihop relaying for V2V transmission. |
| Proposed model | Multihop relaying between V2X, direct V2X and V2V communications. | Enhancing system QoS by finding the optimum autonomous inter-vehicle position to communicate with or to relay information to any destination. |
| Relaying communication between AV2X with direct communication between V2V. |
| Parameters | Value |
|---|---|
| No | −174 dBm |
| B | 10 MHz [26] |
| Rs | 1 bit/s/Hz |
| PVmax | 23 dBm [26] |
| Packet size | 512 bytes |
| fc | 5.9 GHz |
| α | 3 |
| Simulation time | 1000 s |
| Node | 5–100 |
| Speed | 20–70 km/h [22] |
| Traffic agent | TCP |
| Queue | PriQueue with size of 50 packets |
| Propagation mode | Two Ray Model |
| Antenna | Omni-directional with height of 1 m |
| Routing Protocol | DSRC |
| Number of seed | 3 |
| Noise | AWGN |
| ρmax | 100 vehicle/km |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Osman, R.A.; Abdelsalam, A.K. A Novel Adaptive Approach for Autonomous Vehicle Based on Optimization Technique for Enhancing the Communication between Autonomous Vehicle-to-Everything through Cooperative Communication. Appl. Sci. 2021, 11, 9089. https://doi.org/10.3390/app11199089
Osman RA, Abdelsalam AK. A Novel Adaptive Approach for Autonomous Vehicle Based on Optimization Technique for Enhancing the Communication between Autonomous Vehicle-to-Everything through Cooperative Communication. Applied Sciences. 2021; 11(19):9089. https://doi.org/10.3390/app11199089
Chicago/Turabian StyleOsman, Radwa Ahmed, and Ahmed Kadry Abdelsalam. 2021. "A Novel Adaptive Approach for Autonomous Vehicle Based on Optimization Technique for Enhancing the Communication between Autonomous Vehicle-to-Everything through Cooperative Communication" Applied Sciences 11, no. 19: 9089. https://doi.org/10.3390/app11199089
APA StyleOsman, R. A., & Abdelsalam, A. K. (2021). A Novel Adaptive Approach for Autonomous Vehicle Based on Optimization Technique for Enhancing the Communication between Autonomous Vehicle-to-Everything through Cooperative Communication. Applied Sciences, 11(19), 9089. https://doi.org/10.3390/app11199089