
Investigation of 2DOF PID Controller for Physio-Therapeutic Application for Elbow Rehabilitation

 , ,
, ,  , ,
, , 
Abstract
:1. Introduction
- Develop a robotic system for rehabilitation of elbow flexion.
- Create a two-degree-of-freedom PID torque controller for the elbow robotic rehabilitation system.
2. Mechanical Design of Exoskeleton
2.1. The Revolute Joints
2.2. Mathematical Model
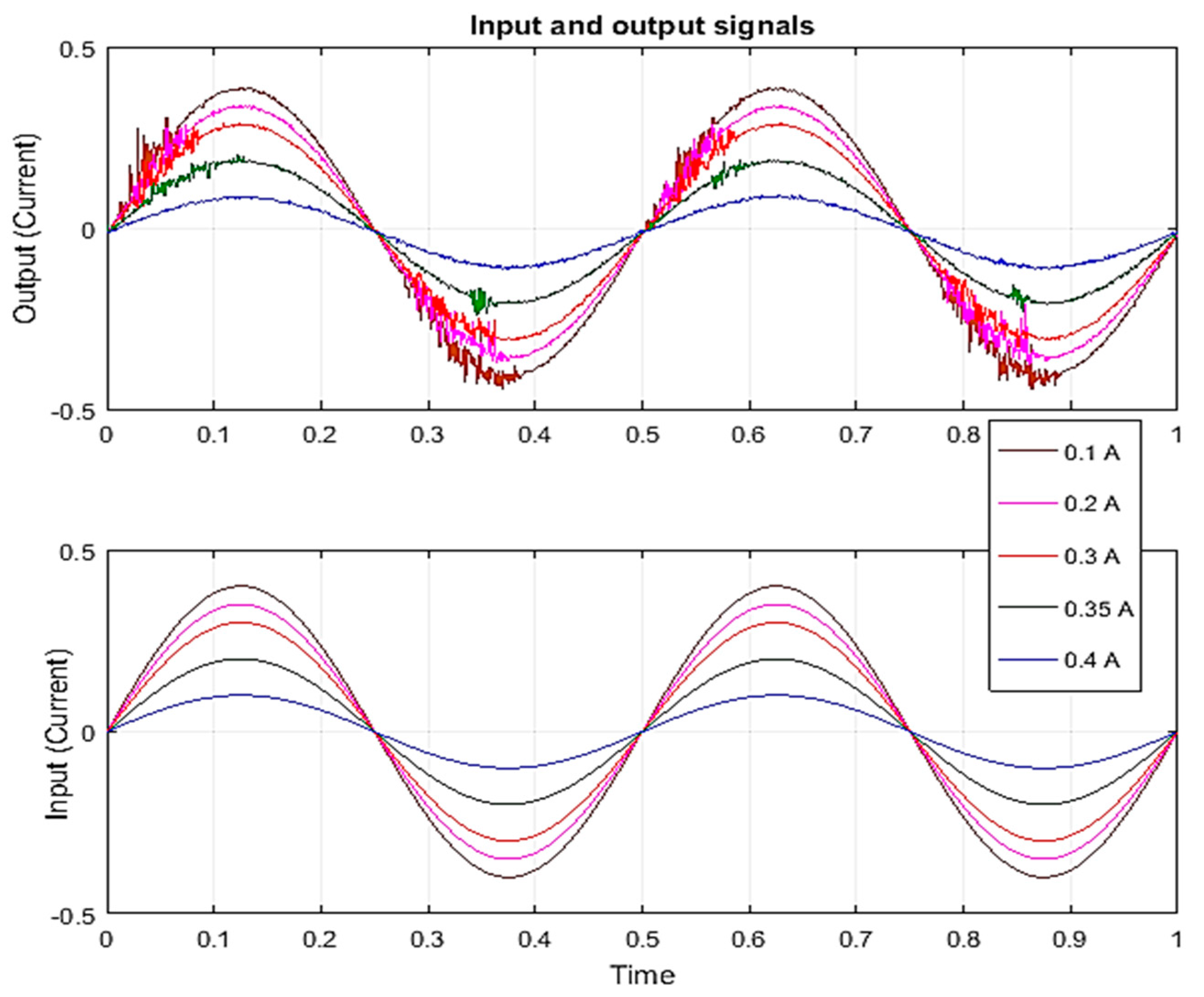
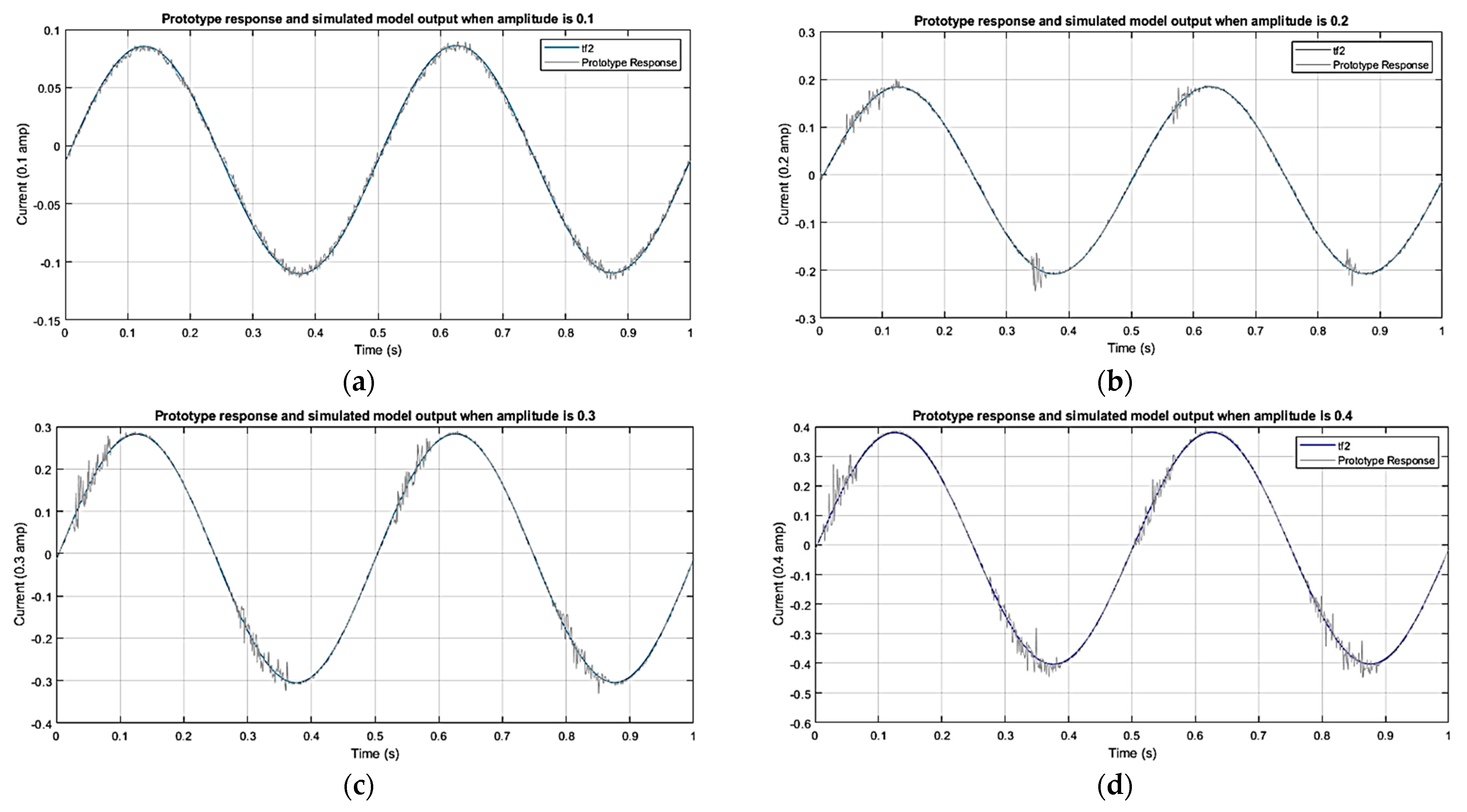
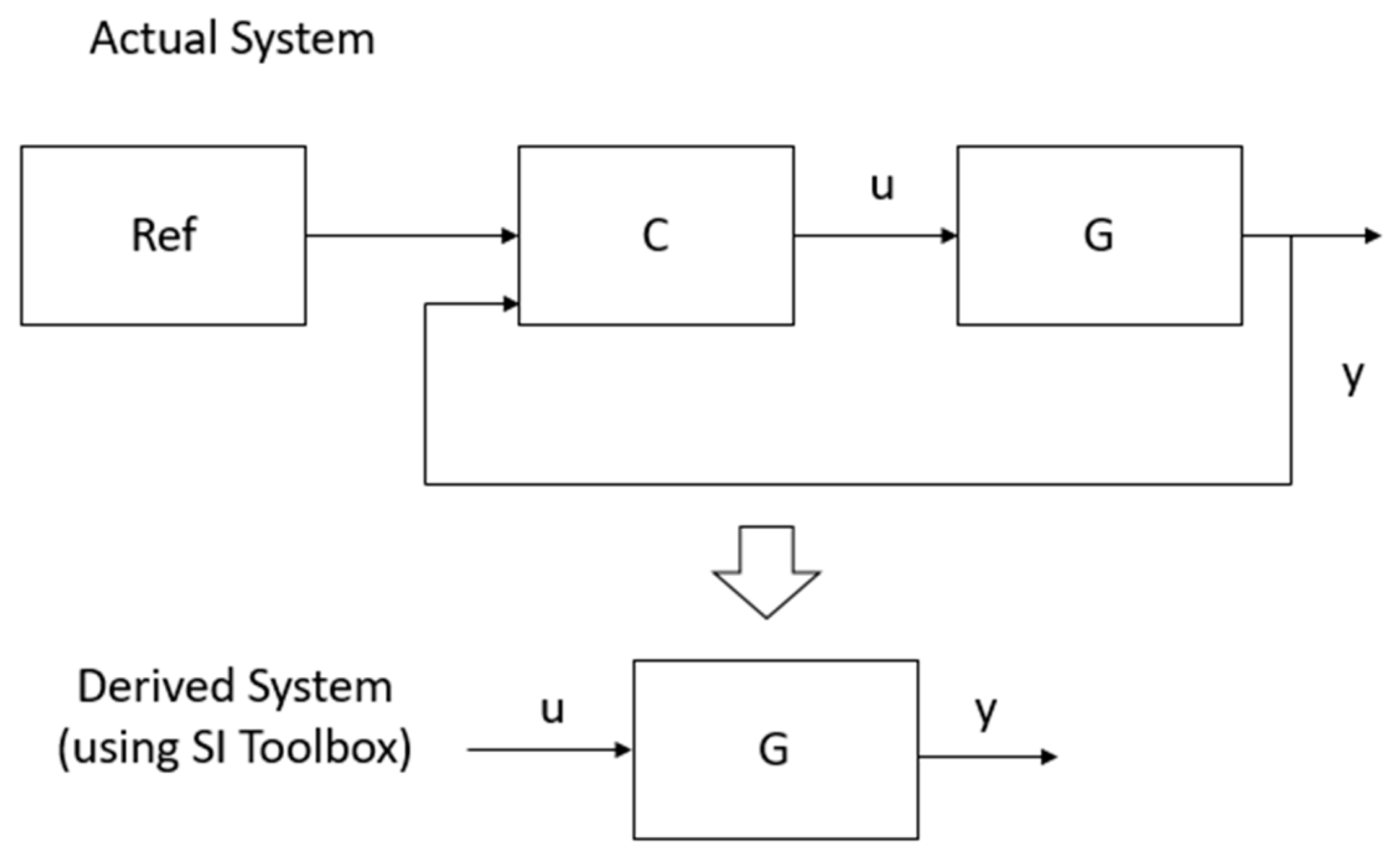
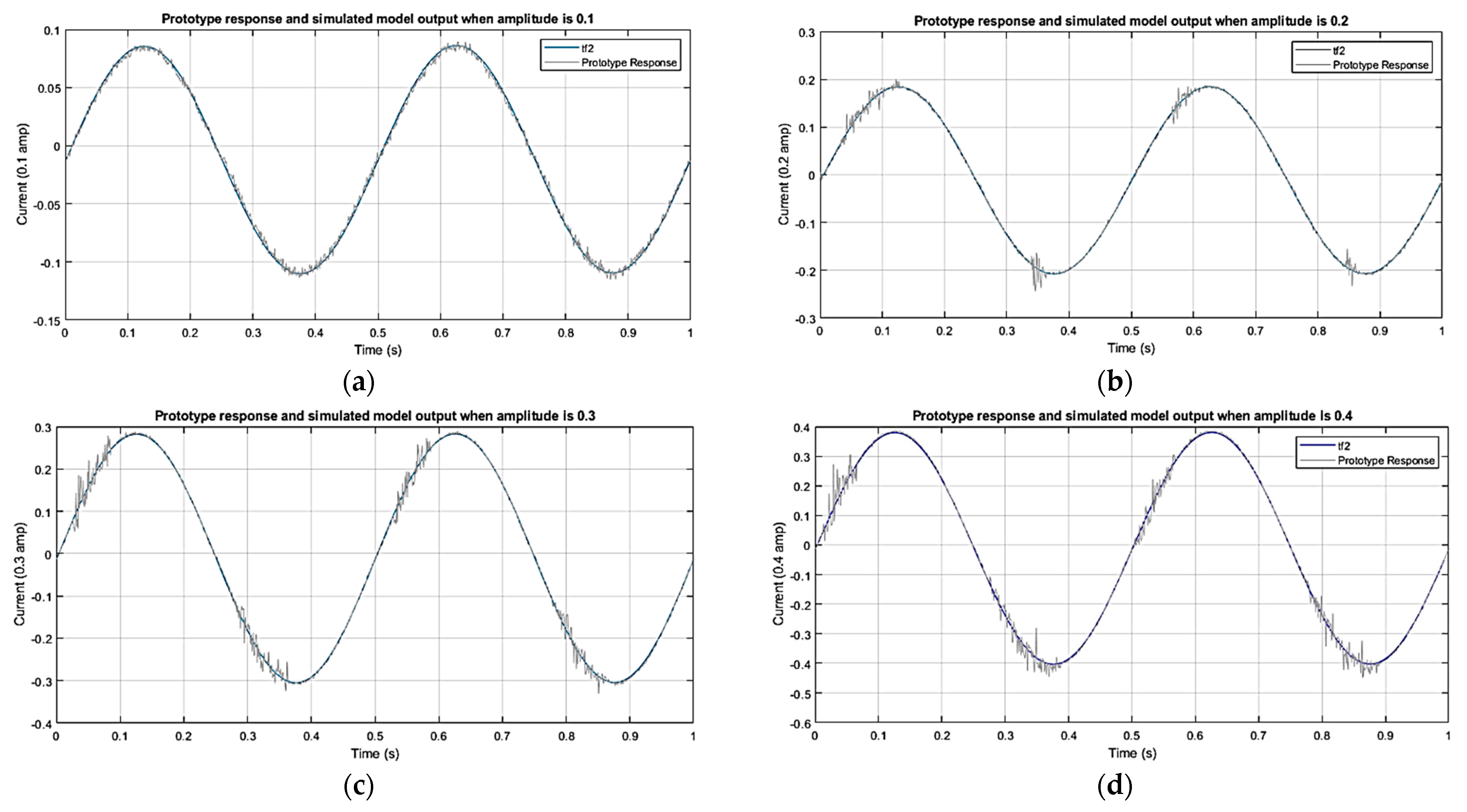
2.3. System Identification
3. Controller Design
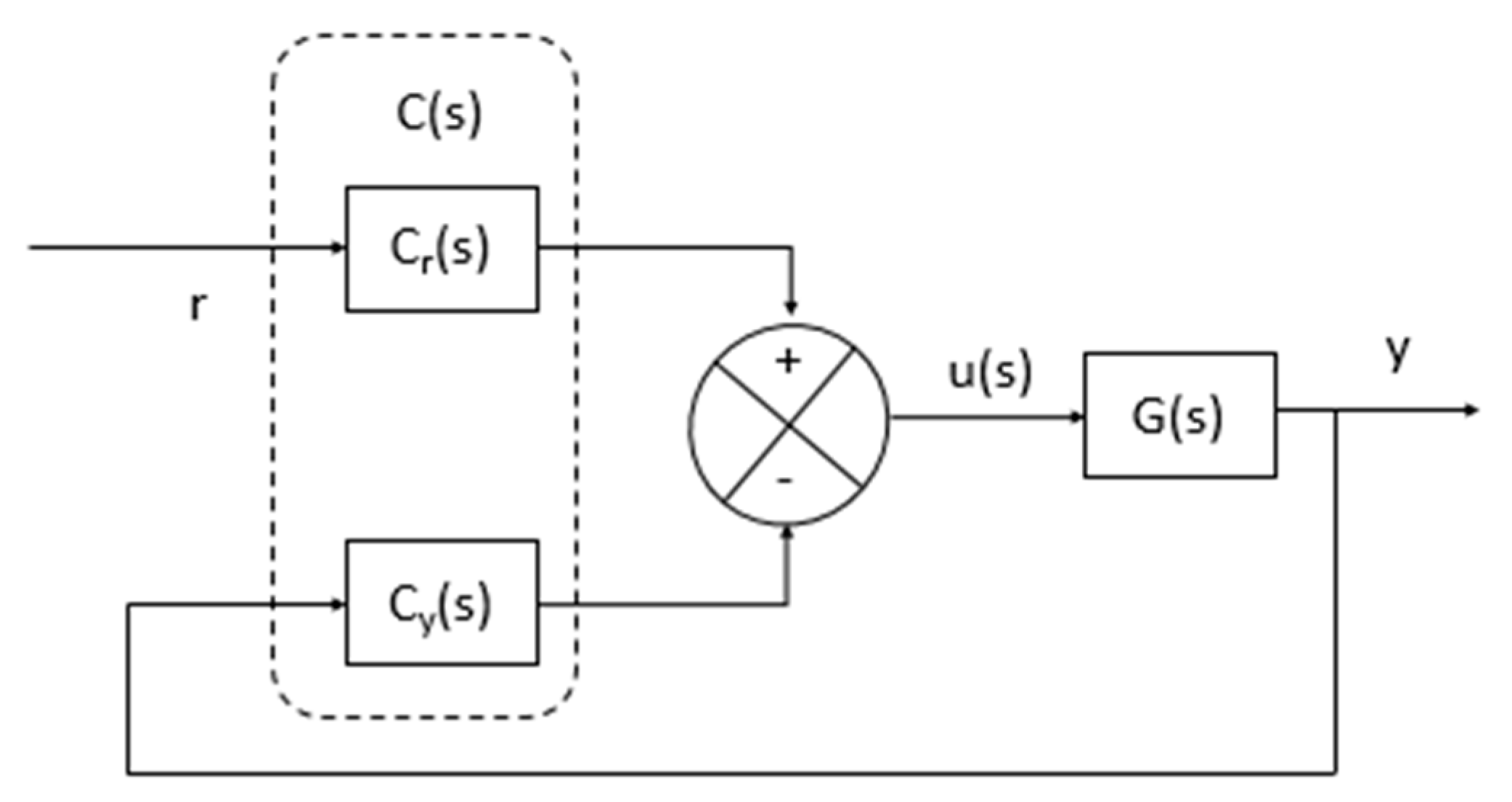
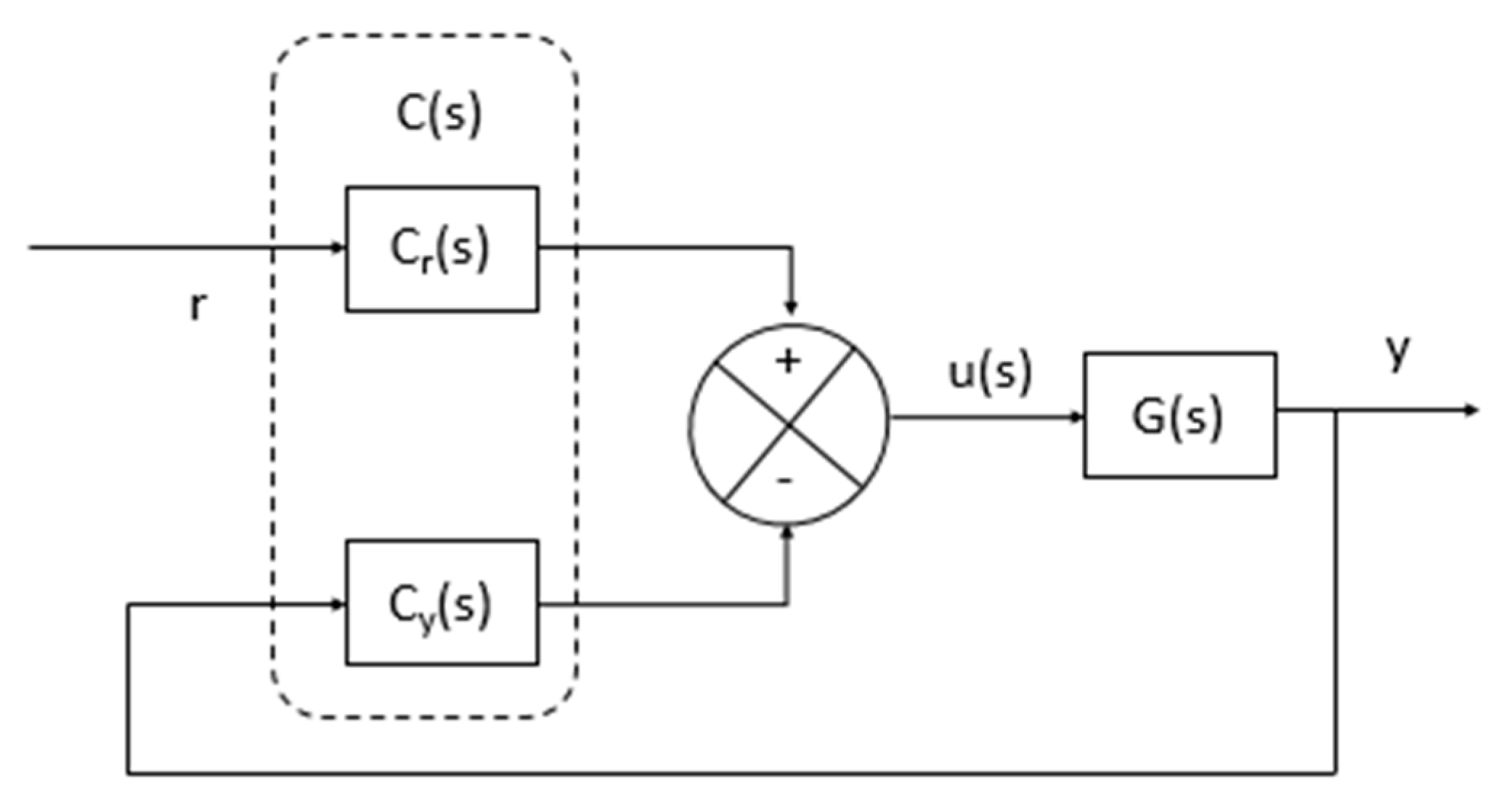
3.1. 2DOF PID Controller Design
3.2. Control and Actuation
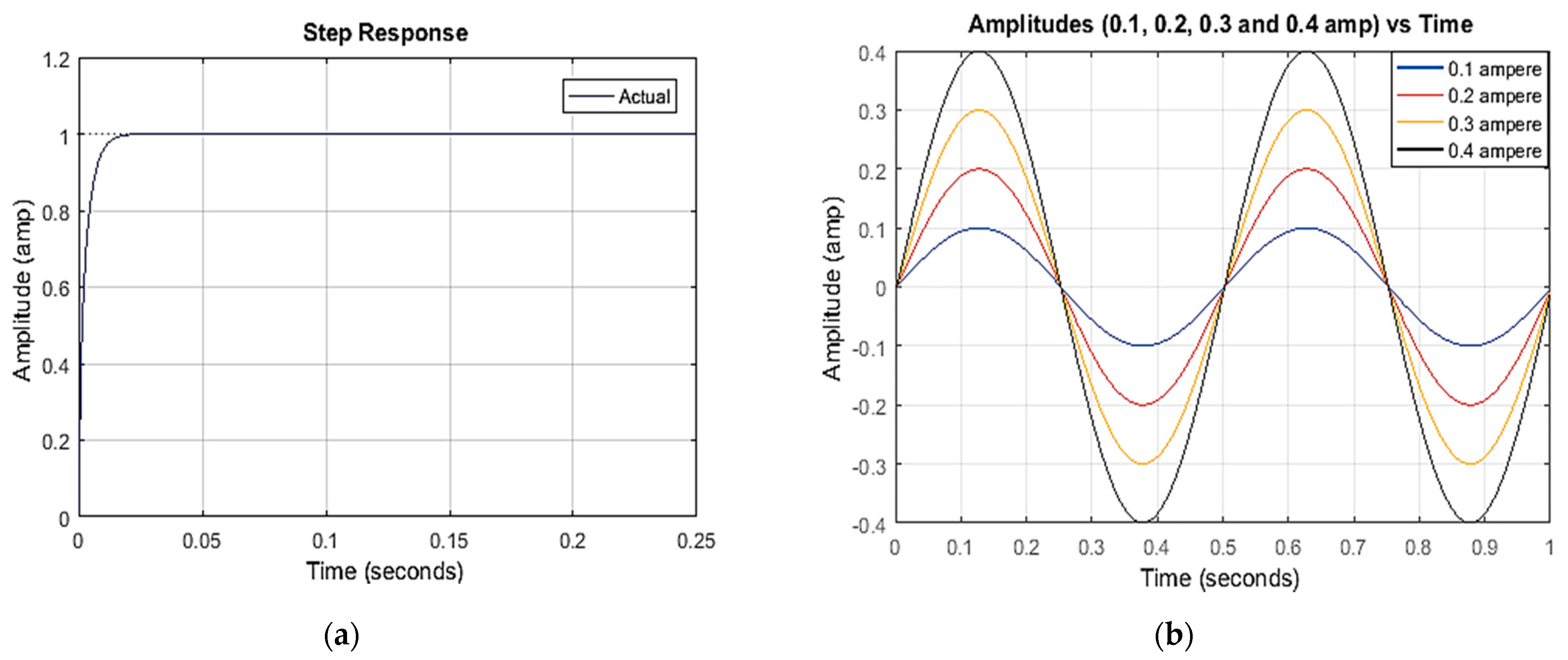
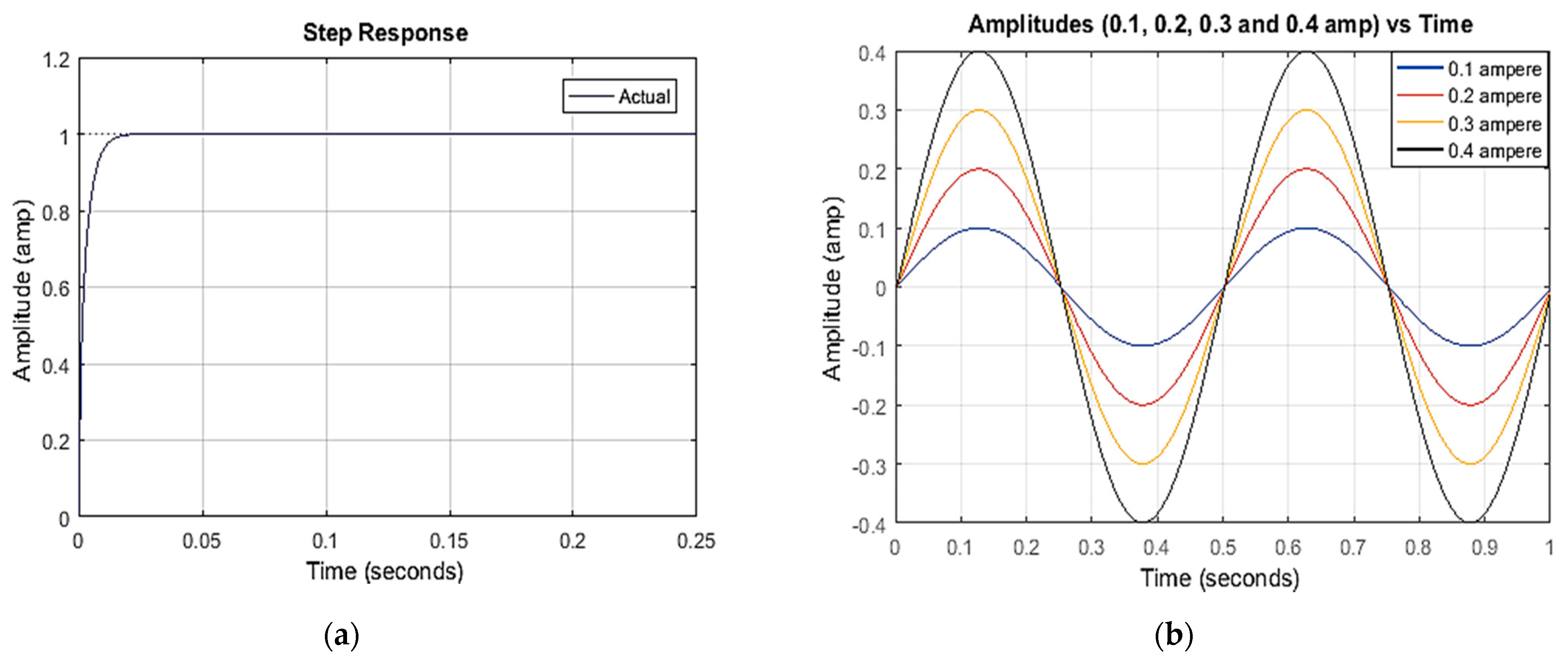
3.3. Controller Performance
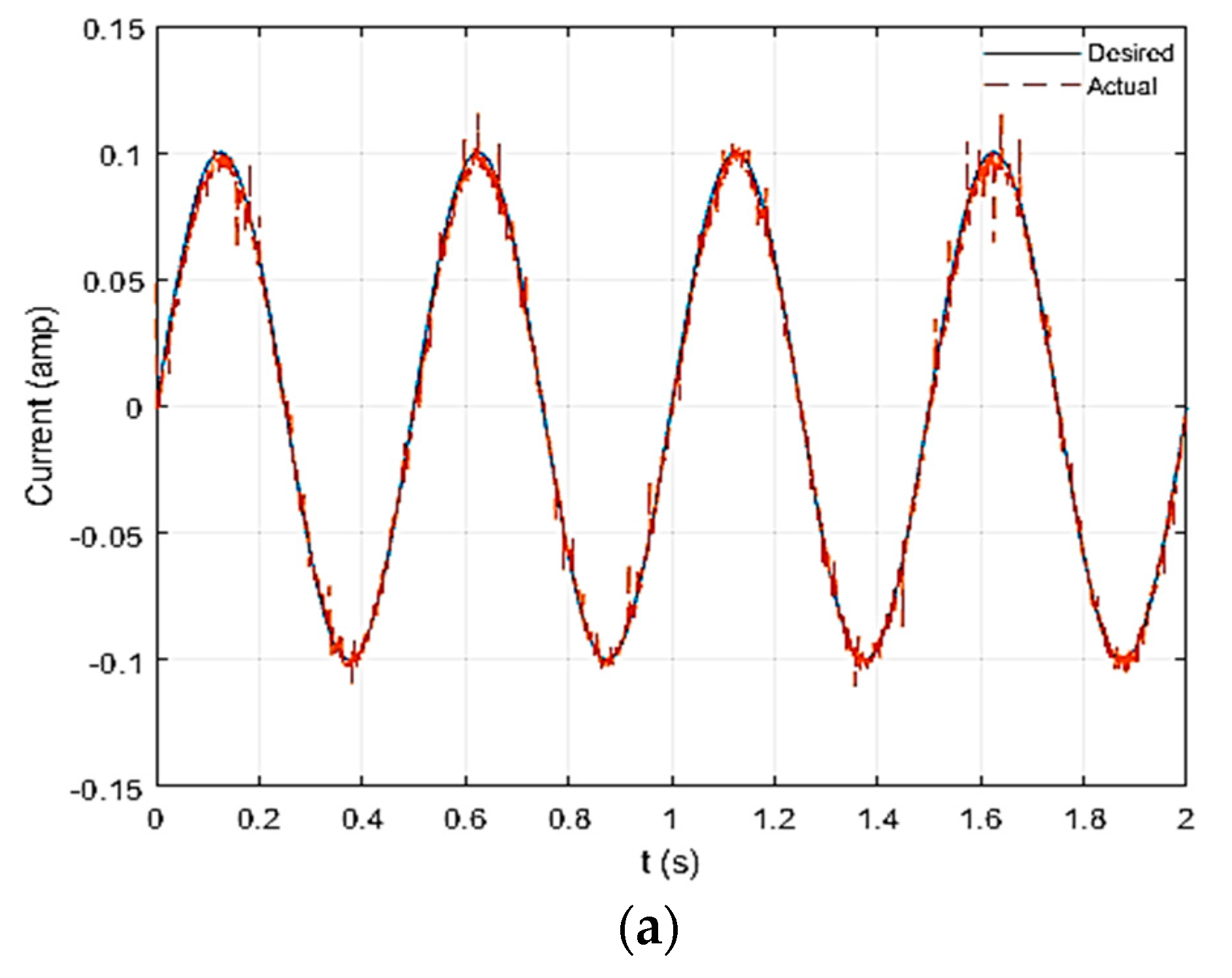
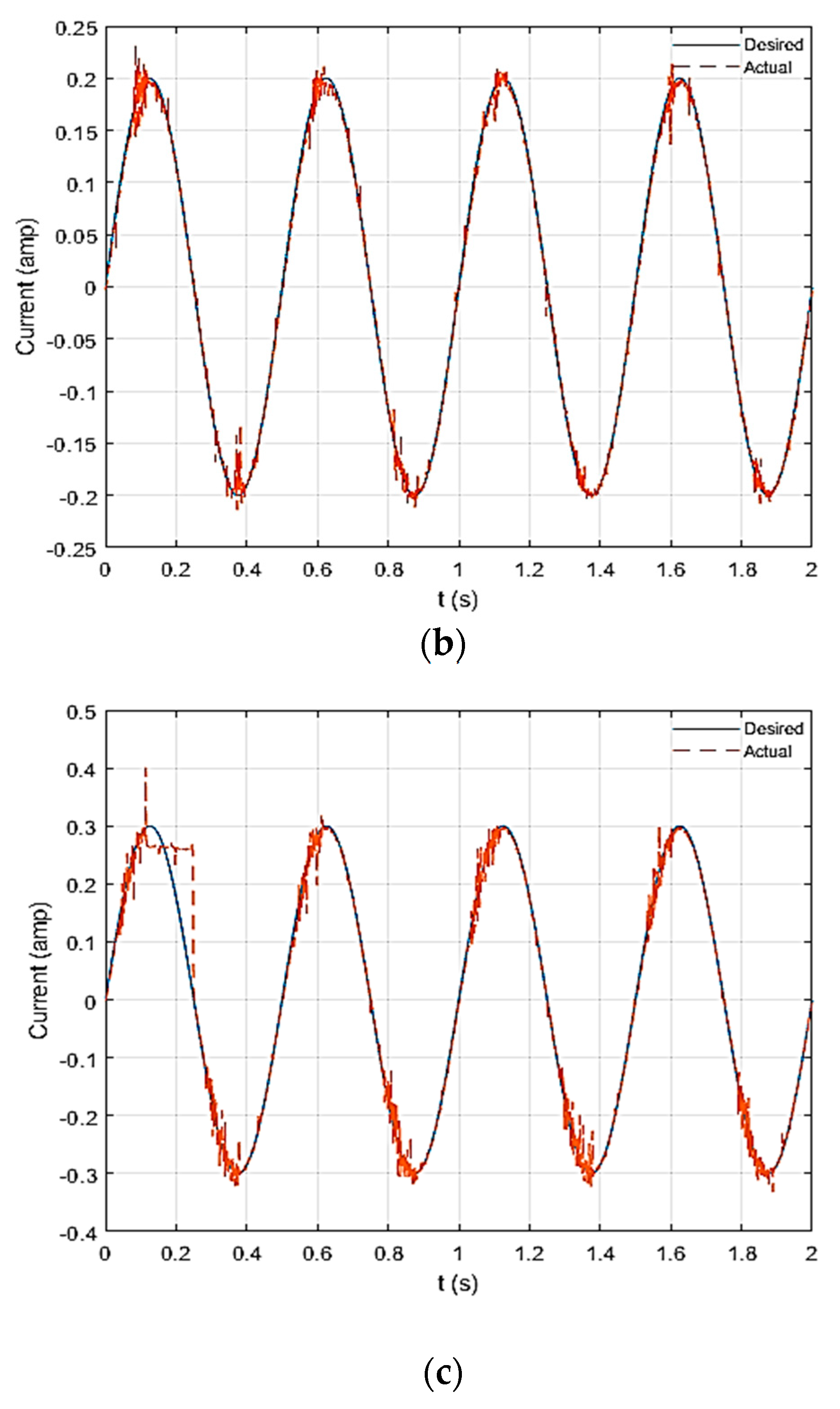
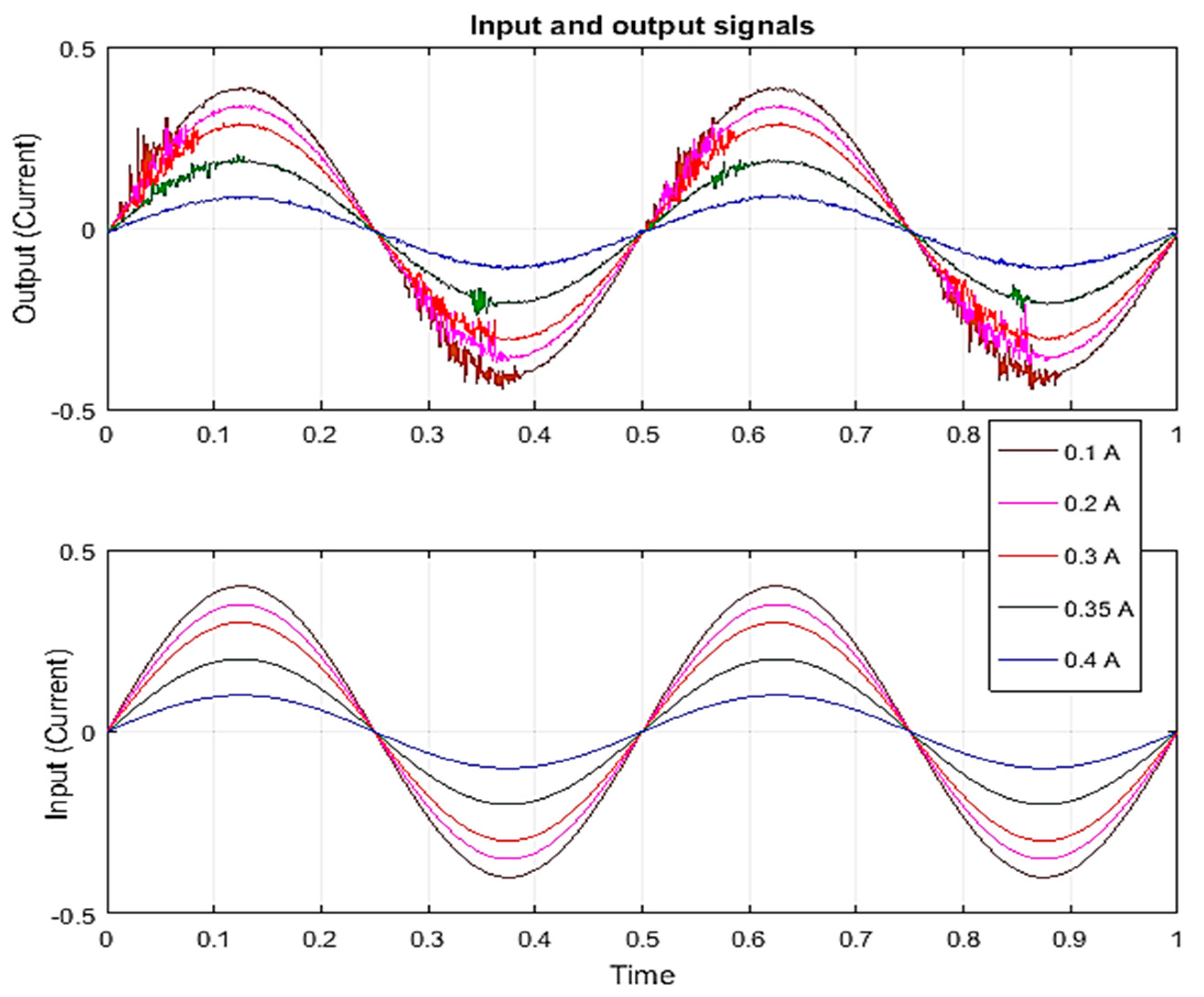
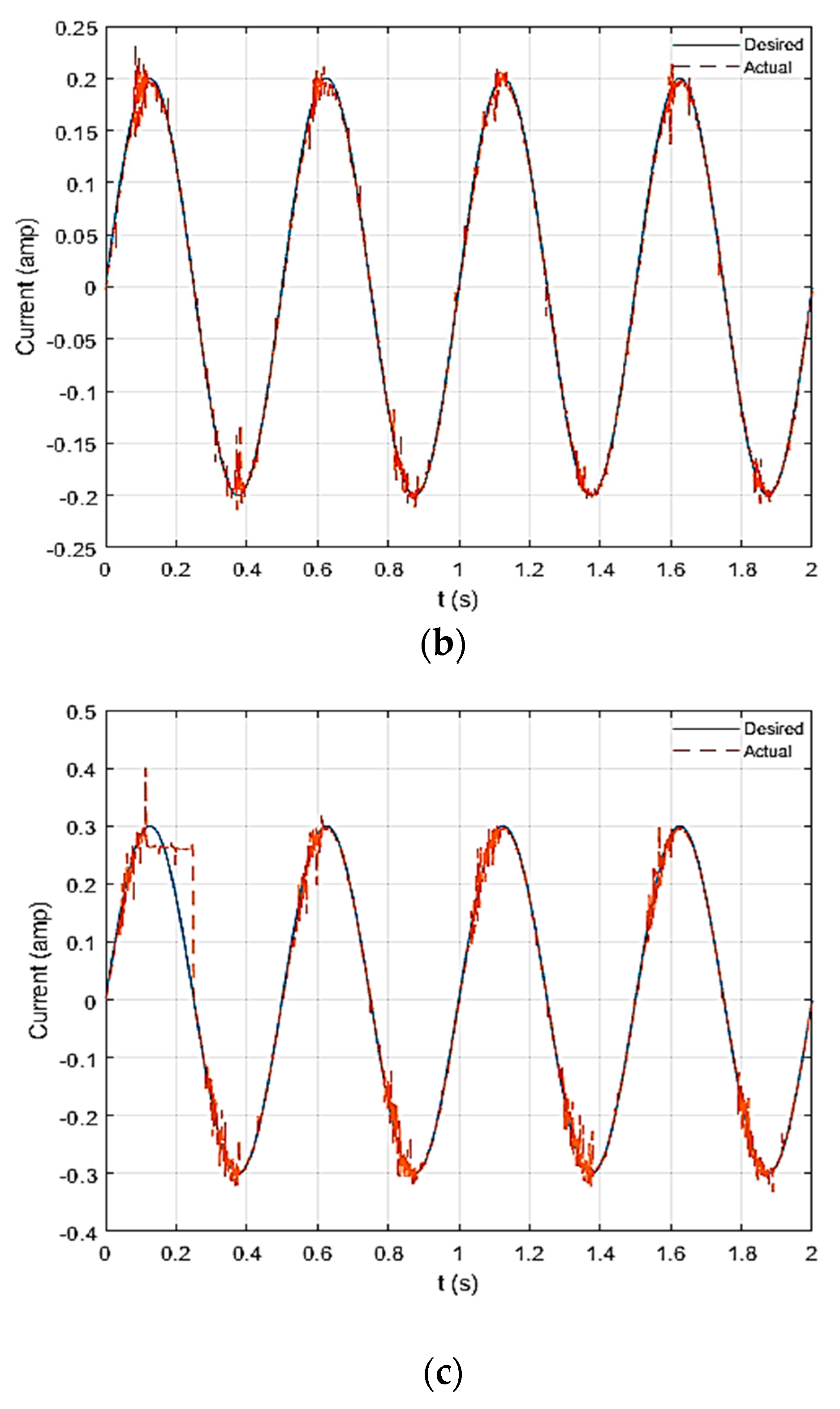
4. Hardware Test
5. Discussions
- Our study did not examine the proposed model’s compatibility with the existing 2DOF PID controller. From a translational standpoint, future research should prioritize examining the possibility of bridging that gap.
- At the time of writing, the global pandemic (SARS-CoV-2) caused a challenge in assessing the clinical experiment designed to evaluate the suggested PID controller’s performance.
- We considered only single-degree elbow movement, although performance can differ when multiple-degree elbow movement is included.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| load torque | |
| Generated torque | |
| back emf | |
| armature current | |
| back emf constant | |
| Torque Constant | |
| amplitude of mass | |
| a | Set point weight for proportional part |
| b | Set point weight for derivative part |
| D | Derivative |
| I | Integral |
| L | armature inductance |
| N | Filter coefficient |
| P | Proportional gain |
| R | armature resistance |
| V | armature voltage |
References
- Yang, C.; Zhang, J.; Chen, Y.; Dong, Y.; Zhang, Y. A review of exoskeleton-type systems and their key technologies. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2008, 222, 1599–1612. [Google Scholar] [CrossRef]
- Jayaraman, A.; Marinov, B.; Singh, Y.; Burt, S.; Rymer, W.Z. Current Evidence for Use of Robotic Exoskeletons in Rehabilitation. In Wearable Robotics; Elsevier: Amsterdam, The Netherlands, 2020; pp. 301–310. [Google Scholar]
- Bao, G.; Pan, L.; Fang, H.; Wu, X.; Yu, H.; Cai, S.; Yu, B.; Wan, Y. Academic review and perspectives on robotic exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2294–2304. [Google Scholar] [CrossRef] [PubMed]
- Kazerooni, H.; Errico, N.J.; Fearing, K.M.; Tung, W.Y.-W. Exoskeleton Support Mechanism for a Medical Exoskeleton. U.S. Patents 10,709,633, 14 July 2020. [Google Scholar]
- Almeida, H.A.; Costa, A.F.; Ramos, C.; Torres, C.; Minondo, M.; Bártolo, P.J.; Nunes, A.; Kemmoku, D.; da Silva, J.V.L. Additive manufacturing systems for medical applications: Case studies. In Additive Manufacturing–Developments in Training and Education; Springer: Berlin/Heidelberg, Germany, 2019; pp. 187–209. [Google Scholar]
- Crowell, H.P.; Park, J.-H.; Haynes, C.A.; Neugebauer, J.M.; Boynton, A.C. Design, evaluation, and research challenges relevant to exoskeletons and exosuits: A 26-year perspective from the US Army Research Laboratory. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 199–212. [Google Scholar] [CrossRef]
- Knapik, J.J.; Reynolds, K.L.; Harman, E. Soldier load carriage: Historical, physiological, biomechanical, and medical aspects. Mil. Med. 2004, 169, 45–56. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Näf, M.B.; Koopman, A.S.; Baltrusch, S.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Passive back support exoskeleton improves range of motion using flexible beams. Front. Robot. AI 2018, 5, 72. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Walsh, C.J.; Endo, K.; Herr, H. A quasi-passive leg exoskeleton for load-carrying augmentation. Int. J. Hum. Robot. 2007, 4, 487–506. [Google Scholar] [CrossRef]
- Fontana, M.; Vertechy, R.; Marcheschi, S.; Salsedo, F.; Bergamasco, M. The body extender: A full-body exoskeleton for the transport and handling of heavy loads. IEEE Robot. Autom. Mag. 2014, 21, 34–44. [Google Scholar] [CrossRef]
- Adarraga, J.M. Safety and Control Exoskeleton for Snow Skiing. U.S. Patents 8,060,945, 22 November 2011. [Google Scholar]
- Li, Z.; Xie, H.; Li, W.; Yao, Z. Proceeding of human exoskeleton technology and discussions on future research. Chin. J. Mech. Eng. 2014, 27, 437–447. [Google Scholar] [CrossRef]
- Lee, H.; Kim, W.; Han, J.; Han, C. The technical trend of the exoskeleton robot system for human power assistance. Int. J. Precis. Eng. Manuf. 2012, 13, 1491–1497. [Google Scholar] [CrossRef]
- Young, A.J.; Ferris, D.P. State of the art and future directions for lower limb robotic exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Mei, X.; Hu, Y.; Fang, Y.; Wu, S.; You, F.; Kuang, S. Development of an E-Health App for Lower Limb Postoperative Rehabilitation Based on Plantar Pressure Analysis. Appl. Sci. 2018, 8, 766. [Google Scholar] [CrossRef] [Green Version]
- Russo, M.; Ceccarelli, M. Analysis of a Wearable Robotic System for Ankle Rehabilitation. Machines 2020, 8, 48. [Google Scholar] [CrossRef]
- Fazekas, G.; Horvath, M.; Troznai, T.; Toth, A. Robot-mediated upper limb physiotherapy for patients with spastic hemiparesis: A preliminary study. J. Rehabil. Med. 2007, 39, 580–582. [Google Scholar] [CrossRef] [Green Version]
- Gull, M.A.; Bai, S.; Bak, T. A review on design of upper limb exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef] [Green Version]
- Tucan, P.; Gherman, B.; Major, K.; Vaida, C.; Major, Z.; Plitea, N.; Carbone, G.; Pisla, D. Fuzzy logic-based risk assessment of a parallel robot for elbow and wrist rehabilitation. Int. J. Environ. Res. Public Health 2020, 17, 654. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, C.-T.; Lien, W.-Y.; Chen, C.-T.; Wu, Y.-C. Implementation of an upper-limb exoskeleton robot driven by pneumatic muscle actuators for rehabilitation. Actuators 2020, 9, 106. [Google Scholar] [CrossRef]
- Takubo, T.; Arai, T.; Inoue, K.; Ochi, H.; Konishi, T.; Tsurutani, T.; Hayashibara, Y.; Koyanagi, E. Integrated limb mechanism robot ASTERISK. J. Robot. Mechatron. 2006, 18, 203–214. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, K.; Sun, S.; Gao, Z.; Zhang, L.; Yang, Z. An upper-limb power-assist exoskeleton using proportional myoelectric control. Sensors 2014, 14, 6677–6694. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Agarwal, P.; Fox, J.; Yun, Y.; O’Malley, M.K.; Deshpande, A.D. An index finger exoskeleton with series elastic actuation for rehabilitation: Design, control and performance characterization. Int. J. Robot. Res. 2015, 34, 1747–1772. [Google Scholar] [CrossRef]
- Vikartovska, Z.; Kuricova, M.; Farbakova, J.; Liptak, T.; Mudronova, D.; Humenik, F.; Madari, A.; Maloveska, M.; Sykova, E.; Cizkova, D. Stem Cell Conditioned Medium Treatment for Canine Spinal Cord Injury: Pilot Feasibility Study. Int. J. Mol. Sci. 2020, 21, 5129. [Google Scholar] [CrossRef] [PubMed]
- Song, Z.; Zhang, S. Preliminary study on continuous recognition of elbow flexion/extension using sEMG signals for bilateral rehabilitation. Sensors 2016, 16, 1739. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Fu, Q.; Guo, S.; Fu, Y. Coordinative motion-based bilateral rehabilitation training system with exoskeleton and haptic devices for biomedical application. Micromachines 2019, 10, 8. [Google Scholar] [CrossRef] [Green Version]
- Copaci, D.; Serrano, D.; Moreno, L.; Blanco, D. A high-level control algorithm based on sEMG signalling for an elbow joint SMA exoskeleton. Sensors 2018, 18, 2522. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.H.; Saad, M.; Kenné, J.P.; Archambault, P.S. Nonlinear sliding mode control implementation of an upper limb exoskeleton robot to provide passive rehabilitation therapy. In Proceedings of the International Conference on Intelligent Robotics and Applications, Yantai, China, 22–25 October 2021; pp. 52–62. [Google Scholar]
- Yu, W.; Rosen, J.; Li, X. PID admittance control for an upper limb exoskeleton. In Proceedings of 2011 American Control Conference; IEEE: San Francisco, CA, USA, 2011; pp. 1124–1129. [Google Scholar]
- Su, H.; Li, Z.; Li, G.; Yang, C. EMG-Based neural network control of an upper-limb power-assist exoskeleton robot. In International Symposium on Neural Networks; Springer: Berlin/Heidelberg, Germany, 2013; pp. 204–211. [Google Scholar]
- Kim, J.-Y.; Park, G.; Lee, S.-A.; Nam, Y. Analysis of machine learning-based assessment for elbow spasticity using inertial sensors. Sensors 2020, 20, 1622. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.T.; Trinh, V.C.; Le, T.D. An adaptive fast terminal sliding mode controller of exercise-assisted robotic arm for elbow joint rehabilitation featuring pneumatic artificial muscle actuator. Actuators 2020, 9, 118. [Google Scholar] [CrossRef]
- Palm, R.; Iliev, B. Learning of grasp behaviors for an artificial hand by time clustering and Takagi-Sugeno modeling. In Proceedings of the 2006 IEEE International Conference on Fuzzy Systems; IEEE: Vancouver, BC, Canada, 2006; pp. 291–298. [Google Scholar]
- Gulletta, G.; Erlhagen, W.; Bicho, E. Human-like arm motion generation: A Review. Robotics 2020, 9, 102. [Google Scholar] [CrossRef]
- Visioli, A. Practical PID Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Kafuko, M.; Wanyama, T. Integrated hands-on and remote PID tuning laboratory. In Proceedings of the Canadian Engineering Education Association (CEEA), Hamilton, ON, Canada, 31 May–3 June 2015; McMaster University. [Google Scholar]
- Mounis, S.Y.A.; Azlan, N.Z.; Fatai, S. Optimal Linear Quadratic Gaussian Torque Controller (LQG) for Upper Limb Rehabilitation. In Proceedings of 2019 7th International Conference on Mechatronics Engineering (ICOM); IEEE: Putrajaya, Malaysia, 2019; pp. 1–6. [Google Scholar]
- Mounis, S.Y.; Azlan, N.Z.; Sado, F. Assist-as-needed robotic rehabilitation strategy based on Z-spline estimated functional ability. IEEE Access 2020, 8, 157557–157571. [Google Scholar] [CrossRef]
- Sado, F.; Na’im Sidek, S.; Yusuf, H.M. Independent Joint Control of a 3-DOF Robotic System Using PI Controller. In Proceedings of the 2014 International Conference on Computer and Communication Engineering; IEEE: Kuala Lumpur, Malaysia, 2014; pp. 115–118. [Google Scholar]
- Islam, M.; Okasha, M.; Sulaeman, E. A model predictive control (MPC) approach on unit quaternion orientation based quadrotor for trajectory tracking. Int. J. Control Autom. Syst. 2019, 17, 2819–2832. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Transfer Function | Best Fit (%) in Different Amplitudes | |||
|---|---|---|---|---|---|
| Amplitude 0.1 | Amplitude 0.2 | Amplitude 0.3 | Amplitude 0.4 | ||
| 1 | 95.91 | 94.92 | 94.05 | 93.22 | |
| 2 | 95.47 | 95.33 | 94.56 | 93.86 | |
| 3 | 95.18 | 95.28 | 94.59 | 93.94 | |
| 4 | 95.22 | 95.18 | 94.59 | 93.93 | |
| 5 | 94.8 | 95.17 | 94.55 | 93.98 | |
| 6 | 94.29 | 94.88 | 94.4 | 93.91 | |
| 7 | 94.83 | 95.18 | 94.54 | 94.04 | |
| 8 | 94.82 | 95.18 | 94.57 | 94.02 | |
| 9 | 94.76 | 95.18 | 94.56 | 94.02 | |
| 10 | 94.82 | 95.18 | 94.57 | 94.02 | |
| Controller Parameters | Description | Value |
|---|---|---|
| Proportional gain | 0.5 | |
| Integral gain | 400 | |
| Derivative gain | 9.5494 × 10−5 | |
| Filter coefficient | 23.3961 | |
| Set point weight for proportional part | 1 | |
| Set point weight for derivative part | 1 |
| Properties | Performance |
|---|---|
| Rise Time | 0.0065 s |
| Settling Time | 0.9 s |
| Overshoot | 0% |
| Undershoot | 0% |
| Current (amp) | 0.1 | 0.2 | 0.3 |
|---|---|---|---|
| RMSE (%) | 2.5% | 1.4% | 0.65% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roy, R.; Islam, M.; Rashid, M.; Mounis, S.; Ahsan, M.M.; Ahad, M.T.; Siddique, Z.; Kouzani, A.Z.; Mahmud, M.A.P. Investigation of 2DOF PID Controller for Physio-Therapeutic Application for Elbow Rehabilitation. Appl. Sci. 2021, 11, 8617. https://doi.org/10.3390/app11188617
Roy R, Islam M, Rashid M, Mounis S, Ahsan MM, Ahad MT, Siddique Z, Kouzani AZ, Mahmud MAP. Investigation of 2DOF PID Controller for Physio-Therapeutic Application for Elbow Rehabilitation. Applied Sciences. 2021; 11(18):8617. https://doi.org/10.3390/app11188617
Chicago/Turabian StyleRoy, Rupal, Maidul Islam, MM Rashid, Shawgi Mounis, Md Manjurul Ahsan, Md Tanvir Ahad, Zahed Siddique, Abbas Z. Kouzani, and M A Parvez Mahmud. 2021. "Investigation of 2DOF PID Controller for Physio-Therapeutic Application for Elbow Rehabilitation" Applied Sciences 11, no. 18: 8617. https://doi.org/10.3390/app11188617
APA StyleRoy, R., Islam, M., Rashid, M., Mounis, S., Ahsan, M. M., Ahad, M. T., Siddique, Z., Kouzani, A. Z., & Mahmud, M. A. P. (2021). Investigation of 2DOF PID Controller for Physio-Therapeutic Application for Elbow Rehabilitation. Applied Sciences, 11(18), 8617. https://doi.org/10.3390/app11188617