
Application of Multi-System Combination Precise Point Positioning in Landslide Monitoring

 ,
,  ,
, 
Abstract
:1. Introduction
2. PPP Model and Evaluation Index
- S = satellite system;
- IF = ionospheric cancellation combination;
- P = observation value of pseudo-distance;
- L = phase observation;
- = geometric distance;
- c = speed of light;
- = tropospheric delay;
- = receiver clock difference;
- = wavelength;
- = ambiguity;
- = pseudo-range observation noise;
- = phase observation noise.
- B = reference satellite system;
- Si = rest of the constellations except the base system, i = 1,2,3;
- = system deviation between the base system and the rest of the system.
- = prior variances of pseudo-range;
- = phase observations;
- = the height of the angle threshold (30°).
- = standard deviation of pseudo-range observations of reference system (3 m);
- = standard deviation of pseudo-range observations of auxiliary system (6 m);
- = standard deviation of phase observation of reference system (0.003 m);
- = standard deviation of phase observation of auxiliary system (0.006 m).
3. Quantitative Evaluation Index
3.1. Convergence Time
- CT = convergence time (min);
- SI = sampling interval;
- L = the number of epochs required from the beginning of the first epoch until the calculation accuracy meets the limitation requirements.
3.2. Root Mean Square Error
- k = initial epoch at the time of convergence time;
- n = total epoch;
- Pi = parameter to be estimated;
- = the reference value.
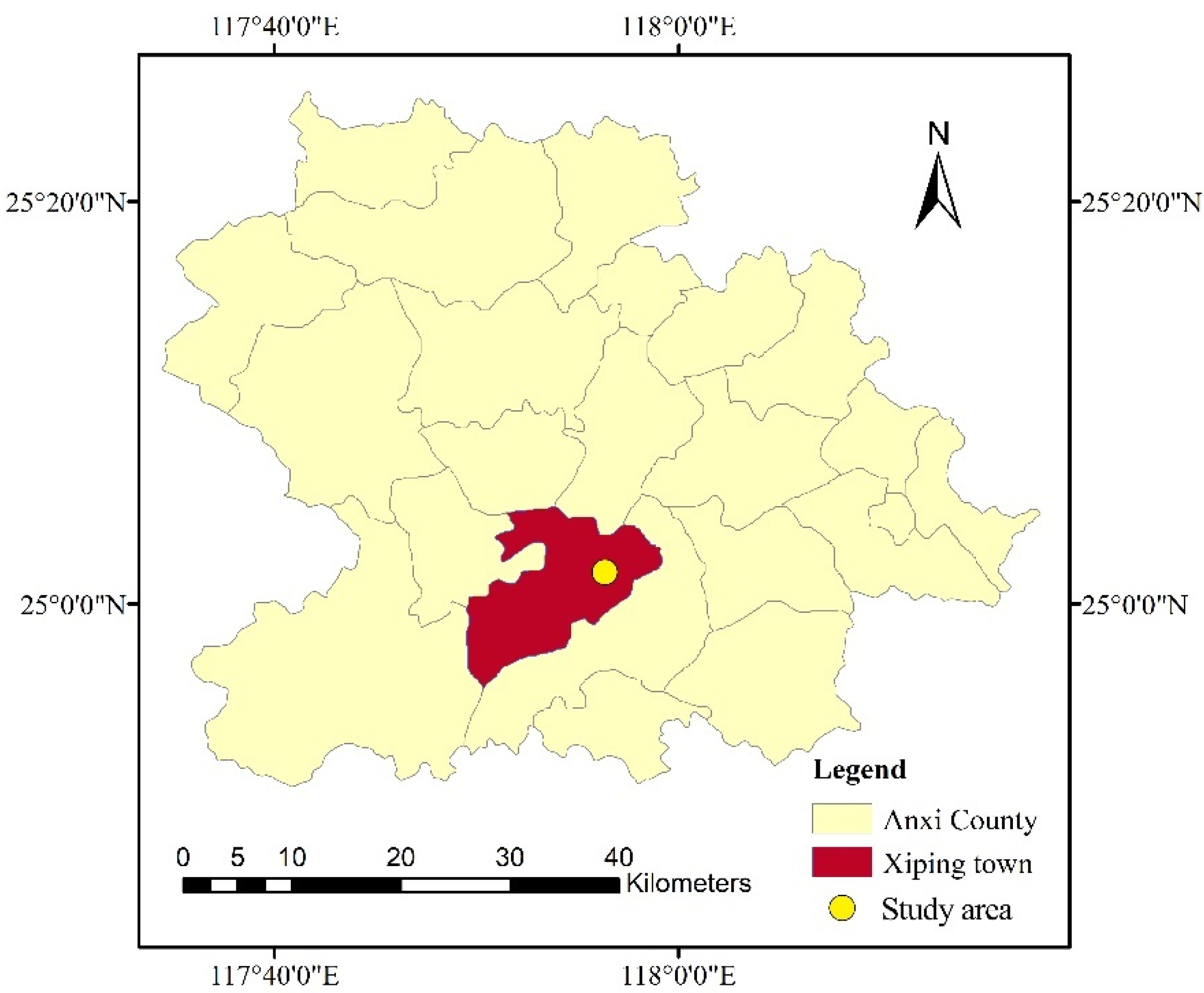
4. Overview of the Study Area
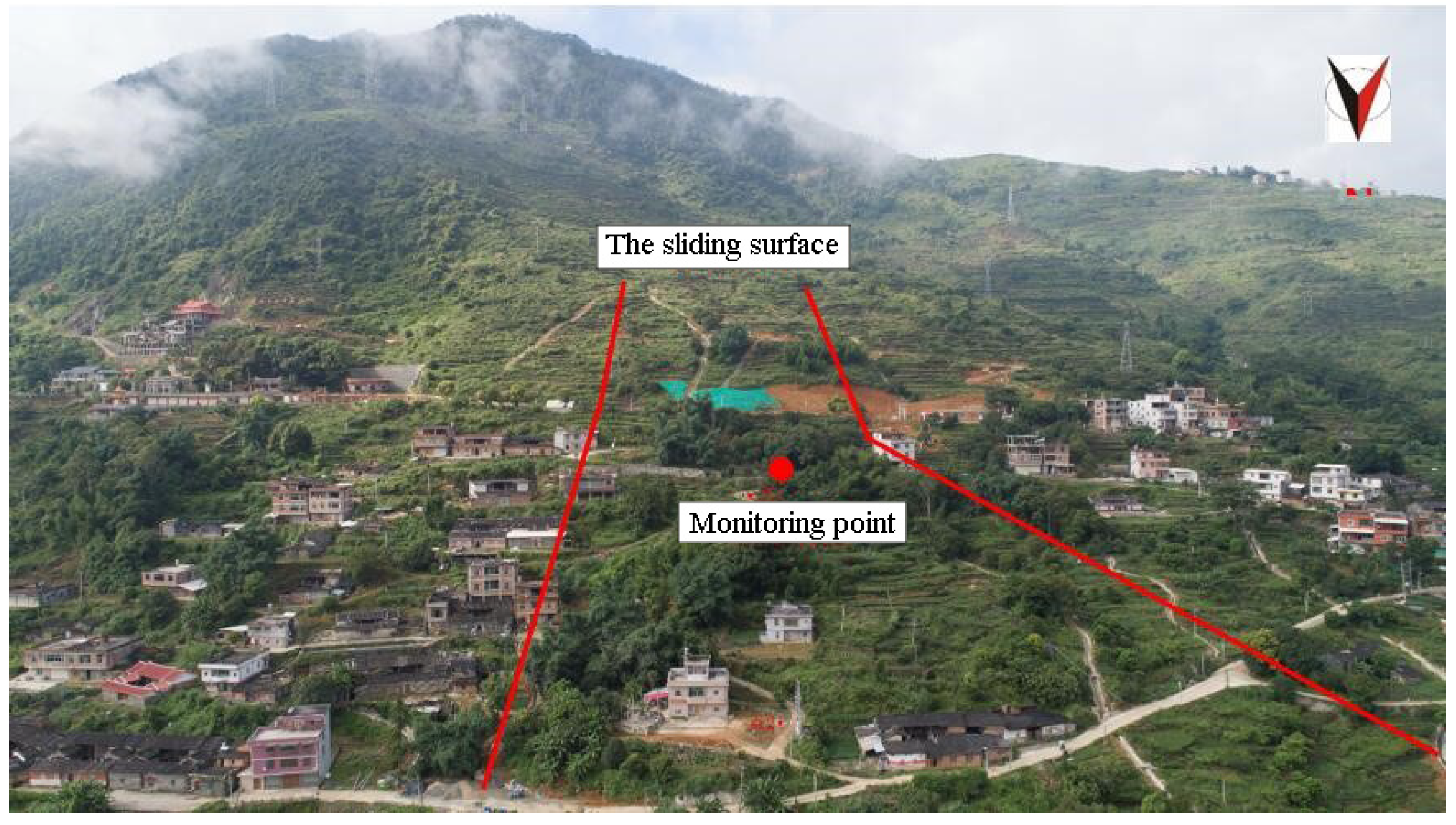
4.1. Basic Characteristics of Landslides in the Study Area
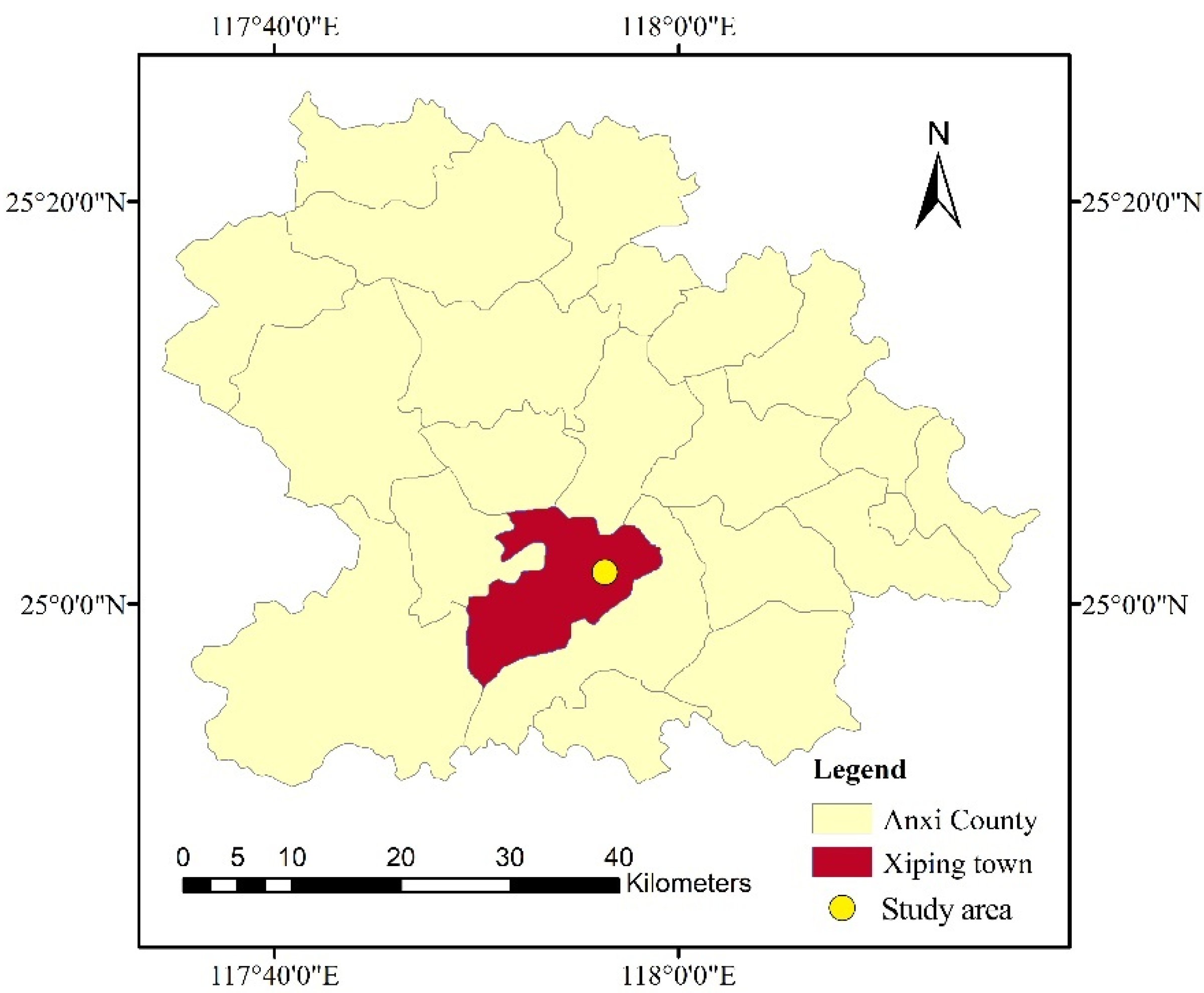
4.2. Location of Monitoring Points
5. Application of Multi-System Combination PPP in Landslide Monitoring
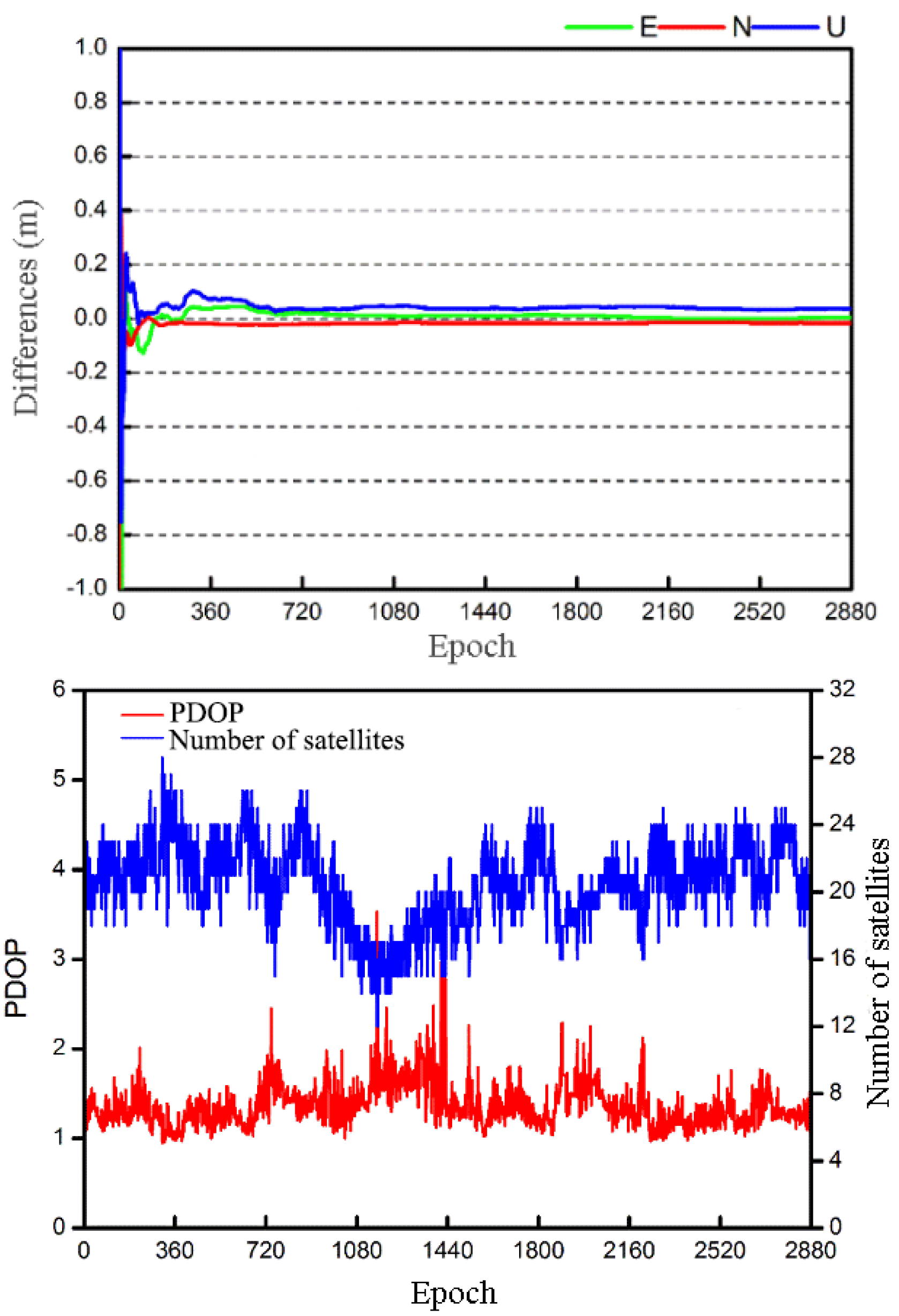
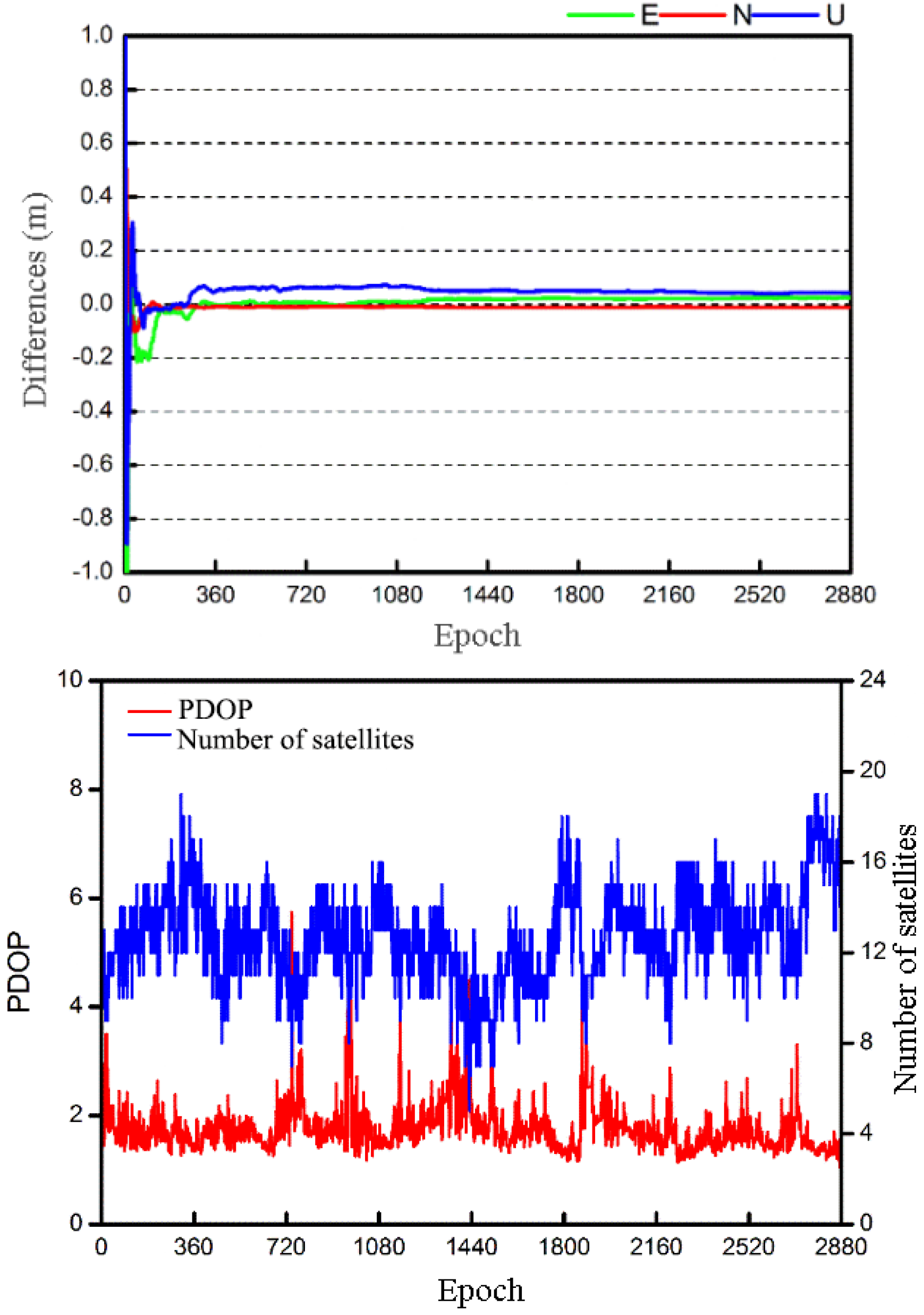
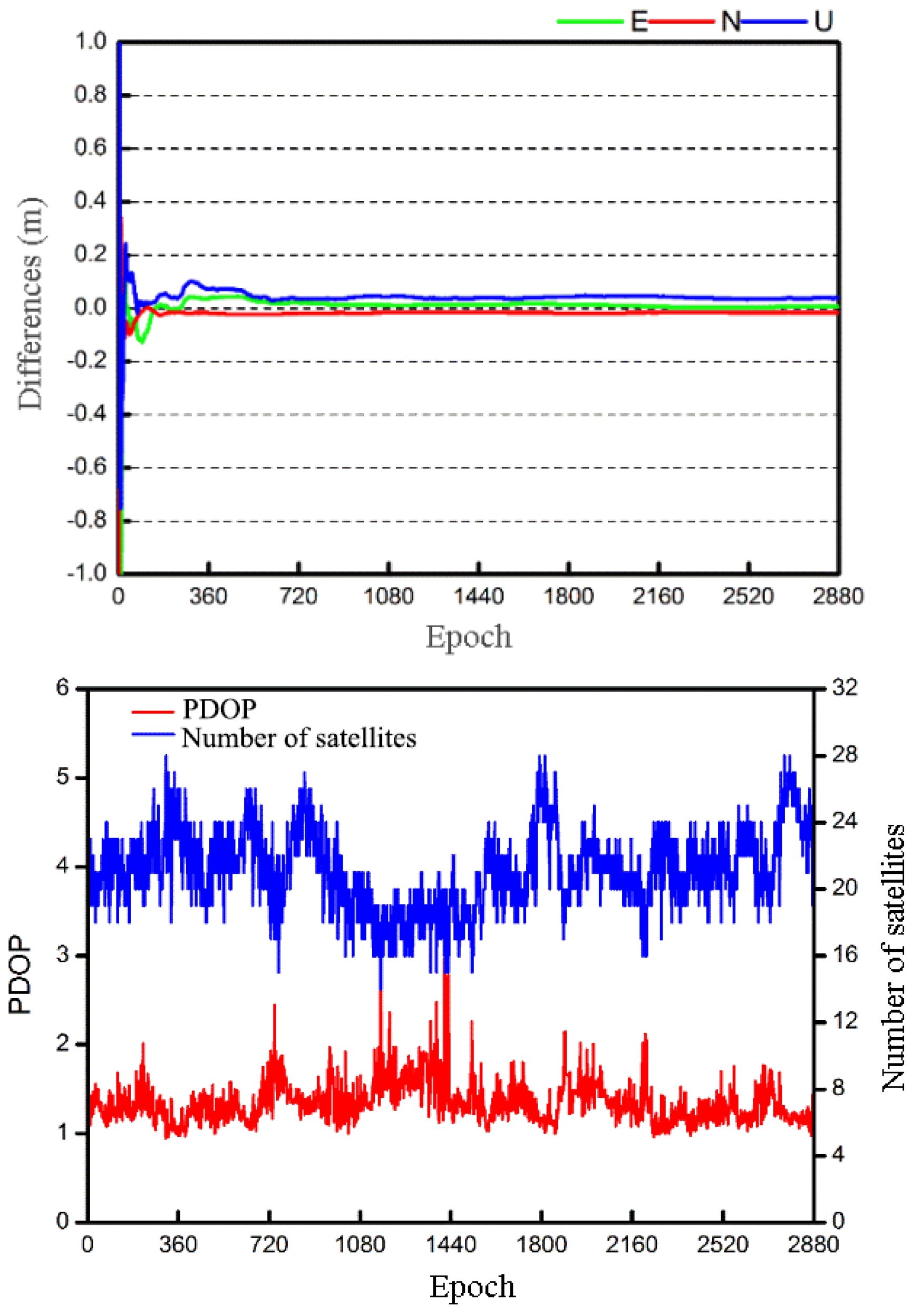
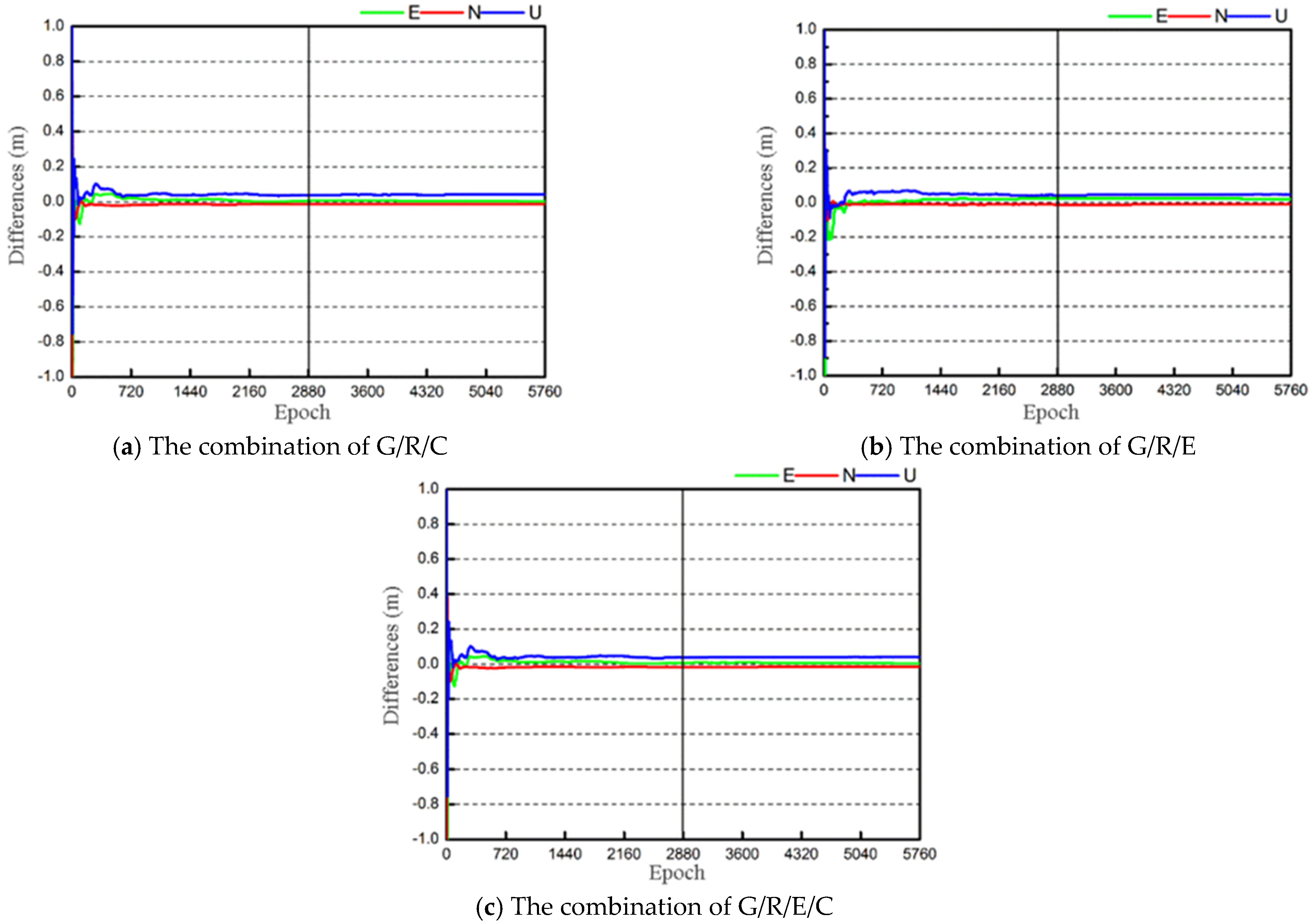
5.1. Analysis of Convergence Time
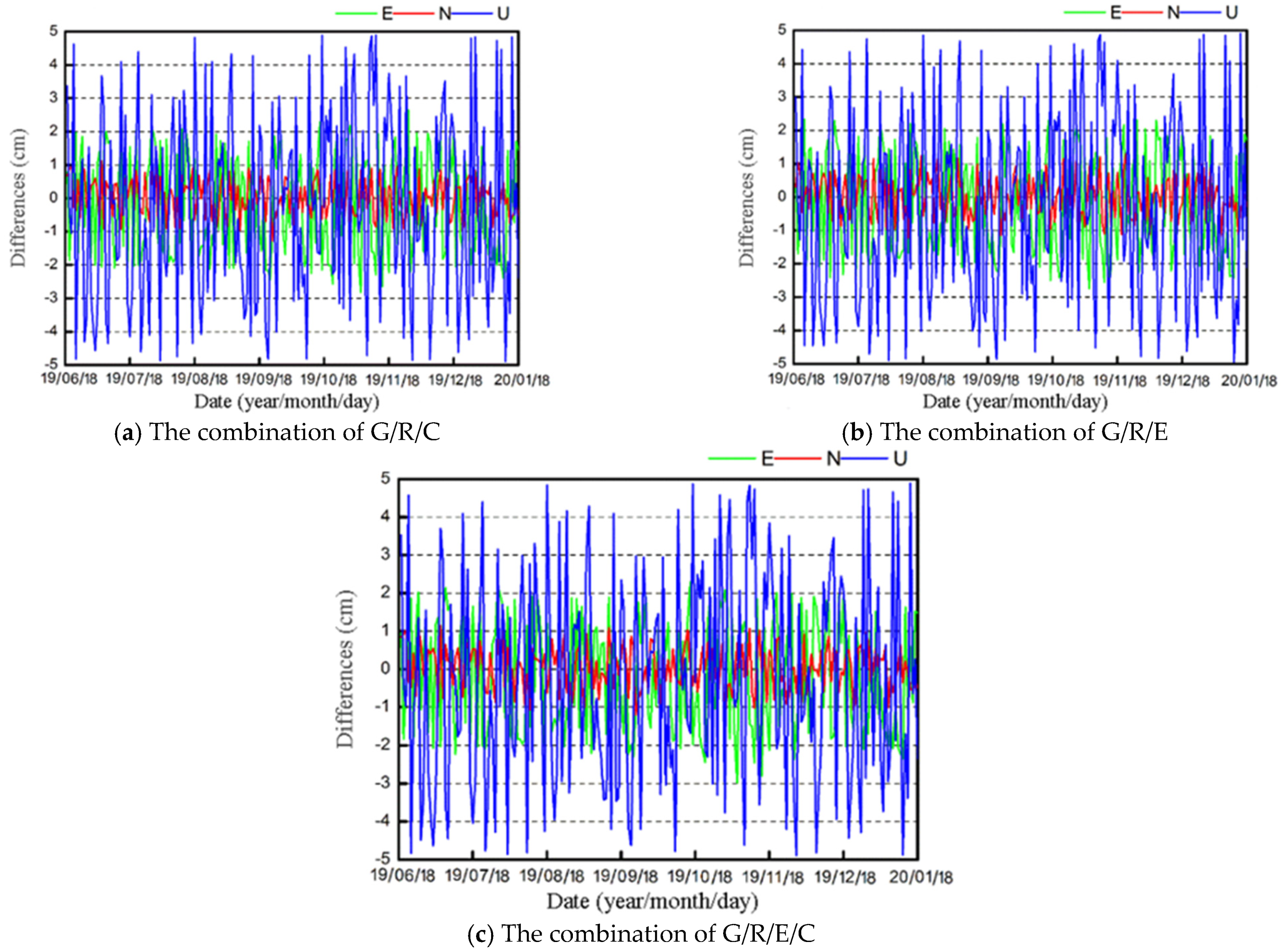
5.2. Analysis of Positioning Accuracy
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Richard, M.I. Landslide triggering by rain infiltration. J. Psychosom. Res. 2000, 36, 1897–1910. [Google Scholar]
- Malamud, B.D.; Turcotte, D.L.; Guzzetti, F.; Reichenbach, P. Landslide inventories and their statistical properties. Earth Surf. Process. Landf. 2004, 29, 687–711. [Google Scholar] [CrossRef]
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.T. Landslide inventory maps: New tools for an old problem. Earth-Sci. Rev. 2012, 1–2, 42–66. [Google Scholar] [CrossRef] [Green Version]
- Yi, Q.L.; Wang, S.Q.; Tu, P.F. Analysis about applicability of monitoring methods for rock fall and landslide. Chin. J. Geol. Hazard Control 1996, 7, 93–101. [Google Scholar]
- Li, H.Y.; Nie, G.G. Coordinate Model Analysis of GPS Monitoring for Large Landslide in Xishan Village. J. Geomatics 2019, 44, 117–119. [Google Scholar]
- Josep, A.G.; Jordi, C.; Joan, R. Using Global Positioning System techniques in landslide monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar]
- Malet, J.-P.; Maquaire, O.; Calais, E. The use of Global Positioning System techniques for the continuous monitoring of landslides: Application to the Super-Sauze earthflow (Alpes-de-Haute-Provence, France). Geomorphology 2002, 43, 33–54. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.N.; Ye, S.R. GPS Precise Point Positioning Using Undifferenced Phase Observation. Geomat. Inf. Sci. Wuhan Univ. 2002, 2002, 234–240. [Google Scholar]
- Zhang, X.H.; Li, X.X.; Li, P. Review of GNSS PPP and Its Application. Acta Geod. Cartogr. Sinica 2017, 46, 1399–1407. [Google Scholar]
- Ren, X.D.; Zhang, K.K.; Li, X.X.; Zhang, X.H. Precise Point Positioning with Multi-constellation Satellite Systems: Beidou Galileo GLONASS GPS. Acta Geod. Cartogr. Sinica 2015, 44, 1307–1313. [Google Scholar]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Zhang, X.; Huang, G.W.; Tu, R.; Zhang, S.C. Experiment results and analysis of landslide monitoring by using GPS PPP technology. Rock Soil Mechanics 2014, 35, 2118–2124. [Google Scholar]
- Zhang, X.H.; Zuo, X.; Li, P.; Pan, Y.M. Convergence Time and Positioning Accuracy Comparison between BDS and GPS Precise Point Positioning. Acta Geodactica Cartogr. Sinica 2015, 44, 250–256. [Google Scholar]
- Liu, Y.Y.; Ye, S.R.; Song, W.W.; Lou, Y.D.; Chen, D.Z. Integrating GPS and BDS to shorten the initialization time for ambiguity-fixed PPP. GPS Solut. 2017, 21, 333–343. [Google Scholar] [CrossRef]
- He, H.; Li, J.; Yang, Y.; Xu, J.; Guo, H.; Wang, A. Performance assessment of single- and dual-frequency BeiDou/GPS single-epoch kinematic positioning. GPS Solut. 2014, 18, 393–403. [Google Scholar] [CrossRef]
- Chen, J.; Wang, J.; Zhang, Y.; Yang, S.; Chen, Q.; Gong, X. Modeling and Assessment of GPS/BDS Combined Precise Point Positioning. Sensors 2016, 16, 1151. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Zhang, X.H. Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning. GPS Solut. 2014, 18, 461–471. [Google Scholar] [CrossRef]
- Cai, C.S.; Gao, Y. Modeling and Assessment of Combined GPS/GLONASS Precise Point Positioning. GPS Solut. 2013, 17, 223–236. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglione, S.; Gioia, C. Performance assessment of GPS/GLONASS single point positioning in an urban environment. Acta Geod. Geophys. 2013, 48, 149–161. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.S.; Yuan, H.; Zhou, K. Validation and analysis of the performance of dual-frequency single-epoch BDS/GPS/GLONASS relative positioning. Chin. Sci. Bull. 2015, 60, 857–886. (In Chinese) [Google Scholar] [CrossRef]
- Li, X.; Zheng, K.; Li, X.; Liu, G.; Ge, M.; Wickert, J.; Schuh, H. Real-time capturing of seismic waveforms using high-rate BDS, GPS and GLONASS observations: The 2017 Mw 6.5 Jiuzhaigou earthquake in China. GPS Solut. 2019, 23, 17. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y.; Pan, L.; Zhu, J. Precise Point Positioning with Quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Jiao, G.; Song, S.; Ge, Y.; Su, K.; Liu, Y. Assessment of BeiDou-3 and Multi-GNSS Precise Point Positioning Performance. Sensors 2019, 19, 2496. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Chen, X.; Ge, M.; Schuh, H. Improving multi-GNSS ultra-rapid orbit determination for real-time precise point positioning. J. Geod. 2019, 93, 45–64. [Google Scholar] [CrossRef]
- Lou, Y.; Zheng, F.; Gu, S.; Wang, C.; Guo, H.; Feng, Y. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- Wang, G. Millimeter-Accuracy GPS Landslide Monitoring Using Precise Point Positioning with Single Receiver Phase Ambiguity (PPP-SRPA) Resolution: A Case Study in Puerto Rico. J. Geod. Sci. 2013, 3, 22–31. [Google Scholar] [CrossRef]
- Capilla, R.M.; Berné, J.L.; Martín, A.; Rodrigo, R. Simulation Case Study of Deformations and Landslides Using Real-Time GNSS Precise Point Positioning Technique. Geomat. Nat. Hazards Risk 2016, 7, 1856–1873. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.L.; Gao, Y.P.; Zhang, J. Application of GNSS Precise Point Positioning in landslides—Taking a landslide monitoring data processing in Longnan as an example. Sci. Technol. Innov. Herald. 2015, 12, 58–59. [Google Scholar]
- Huang, G.; Du, Y.; Meng, L.; Huang, G.; Wang, J.; Han, J. Application Performance Analysis of Three GNSS Precise Positioning Technology in Landslide Monitoring. In Proceedings of the China Satellite Navigation Conference (CSNC) 2017, Shanghai, China, 23 May 2017; p. 437. [Google Scholar] [CrossRef]
- Peng, F.Y.; Nie, G.G.; Xue, C.H. Application of GPS/BDS Precise Point Positioning Technology in Landslide Deformation Monitoring. Navig. Position. Timing 2019, 6, 103–112. [Google Scholar]
- Xia, F.; Ye, S.; Xia, P.; Zhao, L.; Jiang, N.; Chen, D.; Hu, G. Assessing the Latest Performance of Galileo-only PPP and the Contribution of Galileo to Multi-GNSS PPP. Adv. Space Res. 2018, 63, 2784–2795. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, S.; Liu, C.; Ou, J.; Yu, X. Assessing the Performance of Multi-GNSS Precise Point Positioning in Asia-Pacific Region. Surv. Rev. 2017, 49, 186–196. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Nie, L.; Wei, C.; Jia, S.; Jiang, S. Initial Assessment of BeiDou-3 Global Navigation Satellite System: Signal Quality, RTK and PPP. GPS Solut. 2019, 23, 111. [Google Scholar] [CrossRef]
- Pierre, H.; Kouba, J. GPS Precise Point positioning using IGS orbit products. Phys. Chem. Earth Part A Solid Earth Geod. 2001, 26, 573–578. [Google Scholar]
- Gao, C.; Wu, F.; Chen, W.; Wang, W. An Improved Weight Stochastic Model in GPS Precise Point Positioning. In Proceedings of the Transportation, Mechanical and Electrical Engineering(TMEE), 2011 International Conference on Transportation, Changchun, China, 16–18 December 2011; pp. 629–632. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Combination | Date | Deviation/cm | RMSE | ||||
|---|---|---|---|---|---|---|---|
| (Year/Month/Day) | E | N | U | E | N | U | |
| 2019/6/18 | 0.79 | 0.69 | 3.37 | 1.32 | 0.55 | 2.85 | |
| 2019/7/18 | −0.22 | 0.58 | −2.93 | 1.53 | 0.58 | 2.79 | |
| 2019/8/18 | 1.72 | 0.68 | −2.71 | 1.61 | 0.56 | 2.77 | |
| G/R/C | 2019/9/18 | −2.15 | −0.7 | −4.1 | 1.34 | 0.57 | 2.68 |
| 2019/10/18 | −2.02 | 0.71 | 2.96 | 1.48 | 0.53 | 2.55 | |
| 2019/11/18 | −1.39 | 0.97 | −1.64 | 1.73 | 0.61 | 2.93 | |
| 2019/12/18 | −1.49 | 0.98 | −1.69 | 1.49 | 0.53 | 2.67 | |
| 2020/1/18 | 1.45 | −0.52 | −2.38 | 1.33 | 0.51 | 3.03 | |
| 2019/6/18 | 0.41 | 0.31 | 3.01 | 1.40 | 0.46 | 2.77 | |
| 2019/7/18 | −0.68 | 0.62 | −2.89 | 1.70 | 0.57 | 2.75 | |
| 2019/8/18 | −1.66 | 0.75 | −2.65 | 1.54 | 0.64 | 2.80 | |
| G/R/E | 2019/9/18 | −1.96 | −0.51 | −3.9 | 1.34 | 0.61 | 2.79 |
| 2019/10/18 | −2.42 | 0.31 | 2.56 | 1.50 | 0.56 | 2.52 | |
| 2019/11/18 | −1.04 | 1.31 | −1.3 | 1.67 | 0.73 | 2.95 | |
| 2019/12/18 | −1.33 | −0.82 | −1.53 | 1.52 | 0.56 | 2.66 | |
| 2020/1/18 | 1.71 | −0.26 | −2.12 | 1.47 | 0.54 | 3.10 | |
| 2019/6/18 | 0.94 | 0.84 | 3.52 | 1.14 | 0.59 | 2.88 | |
| 2019/7/18 | −0.28 | 0.52 | −2.99 | 1.35 | 0.55 | 2.79 | |
| 2019/8/18 | −1.63 | 0.78 | −2.61 | 1.41 | 0.56 | 2.79 | |
| G/R/E/C | 2019/9/18 | −2.21 | −0.76 | −4.16 | 1.14 | 0.59 | 2.68 |
| 2019/10/18 | −2.14 | 0.59 | 2.84 | 1.23 | 0.57 | 2.54 | |
| 2019/11/18 | −1.52 | 0.84 | −1.77 | 1.52 | 0.65 | 2.91 | |
| 2019/12/18 | −1.58 | −1.07 | −1.79 | 1.29 | 0.54 | 2.65 | |
| 2020/1/18 | 1.48 | −0.49 | −2.35 | 1.15 | 0.51 | 3.01 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.; Wu, G.; Feng, X.; Li, D.; Yu, Z.; Wang, X.; Gao, Y.; Guo, J.; Wen, X.; Jian, W. Application of Multi-System Combination Precise Point Positioning in Landslide Monitoring. Appl. Sci. 2021, 11, 8378. https://doi.org/10.3390/app11188378
Lin C, Wu G, Feng X, Li D, Yu Z, Wang X, Gao Y, Guo J, Wen X, Jian W. Application of Multi-System Combination Precise Point Positioning in Landslide Monitoring. Applied Sciences. 2021; 11(18):8378. https://doi.org/10.3390/app11188378
Chicago/Turabian StyleLin, Chen, Guanye Wu, Xiaomin Feng, Dingxing Li, Zhichao Yu, Xuanwei Wang, Yonggang Gao, Jinyun Guo, Xiaole Wen, and Wenbin Jian. 2021. "Application of Multi-System Combination Precise Point Positioning in Landslide Monitoring" Applied Sciences 11, no. 18: 8378. https://doi.org/10.3390/app11188378
APA StyleLin, C., Wu, G., Feng, X., Li, D., Yu, Z., Wang, X., Gao, Y., Guo, J., Wen, X., & Jian, W. (2021). Application of Multi-System Combination Precise Point Positioning in Landslide Monitoring. Applied Sciences, 11(18), 8378. https://doi.org/10.3390/app11188378