2.1. Related Works Relevant to the Dynamap Project
The classification of streets plays an important role for Dynamap. Different attempts are known, and we refer to a few of them. A street categorization has been developed for the city of Valladolid (Spain) [
13], and an urban noise functional stratification has been studied for estimating average annual sound level [
14]. Closely related to this issue is the problem of identifying the type of vehicle producing the noise, e.g., vehicle sound signature recognition by frequency vector principal component analysis [
15], a dimensionality reduction approach for detection of moving vehicles [
16], techniques of acoustic feature extraction for detection and classification of ground vehicles [
17], noise source identification with Beamforming in the pass-by of a car [
18], a scaling model for a speed-dependent vehicle noise spectrum [
19], and a vehicle speed recognition from noise spectral patterns [
20].
Health related issues due to traffic and environmental noise has attracted a great deal of attention over the years. Annoyance issues due to the transportation and their relationships with exposure metrics have been studied [
21]. A study of some effects of aircraft noise on cognitive performance in schoolchildren has been reported [
22], as well as the relation between ambient noise and cognitive processes among primary schoolchildren [
23]. Noise and mental performance quantified by personality attributes and noise sensitivity have been considered [
24], in addition to the important issue of traffic noise and risk of myocardial infarction [
25]. Of prime importance is also the relation between environmental noise, sleep, and health, as discussed in [
26]. Long-term road traffic noise exposure is also associated with an increase in morning tiredness [
27]; in addition, transportation noise resulted in increased blood pressure in adults [
28]. Further work includes the exposure modifiers of the relationships of transportation noise with high blood pressure and noise annoyance [
29], the quantitative relationship between road traffic noise and hypertension from the point of view of meta-analysis [
30]. A recent, updated study on health-related issues of noise has been published by the WHO [
2].
From a larger geographical perspective, there is interest in the environmental burden of disease in Europe by assessing risk factors in some countries [
31], also yielding an international scale implementation of the CNOSSOS-EU road traffic noise prediction model for epidemiological studies [
32]. This can be extended to a global noise score indicator for classroom evaluation of acoustic performances in the LIFE GIOCONDA project, allowing a comparison between different classrooms or schools, based on their acoustic performances, and a homogeneous evaluation of the priority for planning noise mitigation actions in Italian schools [
33]. Research has been performed to suggest a selection of suitable alternatives to reduce the environmental impact of road traffic noise using a fuzzy multi-criteria decision model [
34]. Annoyance evaluation has been performed due to overall railway noise and vibration in Pisa (Italy) urban areas, showing the limitations of traditional noise mapping for railway epidemiological studies based exclusively on ordinary transits, thus confirming the role of vibrations as enhancing factor for disturbance [
35]. A laboratory study has been reported on noise annoyance assessment of various urban road vehicle pass-by noises in isolation and combined with industrial noise [
36]. A survey on exposure–response relationships for road, rail, and aircraft noise annoyance, and the differences between continuous and intermittent noise have been considered [
37]. The application of the intermittency ratio (IR) metric for the classification of urban sites based on road traffic noise events has been studied and proved to be a useful supplementary metric to the equivalent level, which measures only the energy content of the noise exposure [
38]. Finally, a classification of urban road traffic noise based on sound energy and eventfulness indicators, such as the IR, have been considered recently by taking into account measured sound fluctuations in a large urban zone [
39].
The important issue of the assessment of transportation noise due to railways, airports, and high-noise plants have been discussed extensively. Examples include an assessment of railway noise in an urban setting, pointing to the problems the nearby living population experiences due to the railway noise pollution [
40], the ADS-B (Automatic Dependent Surveillance-Broadcast) system, which has proved to be a useful tool for testing and redrawing noise management strategies at Pisa airport, producing cost-effective solutions for the airport noise management in urban areas, particularly when the radar tracks are not available [
41], and a novel method to determine multiexposure priority indices tested for the Pisa action plan has been developed, called Multi Annoyance Building Prioritisation Score (MABPS), which takes into account the annoyance due to the exposure from different sources (multiexposure), showing significant differences with standard methods [
42]. Of related interest is the transportation planning for quiet natural areas preservation based on aircraft overflights’ noise assessment in a National Park [
43]. This is connected to the more technical issue of wind turbine noise, for which a technical procedure has been suggested to simultaneously estimate the emmission and the residual noise components measured nearby a wind farm when the residual noise is mainly generated by wind, thus allowing the evaluation of the noise impact produced by operational wind farms, without requiring the farm shut down [
44]. In addition, the exposure to wind turbine noise has been evaluated by means of perceptual responses and reported health effects [
45]. In addition, a metric reflecting short-term temporal variations of transportation noise exposure has been discussed [
46]. As a way to restore some mitigation to the environment, the so-called green wall has been studied as a sustainable tool in Mediterranean cities, such as of Limassol (Cyprus) [
47]. A case study in Malaysia residential streets has been reported [
48], while the impact of the ring road conclusion to the city of Guimaraes (Portugal) has been analyzed from the point of view of traffic flow variations and accessibilities [
49].
Noise mapping has a long history, and we report some related recent works. In [
50], the authors consider a context sensitive noise impact mapping, while, in [
51], the spatial sampling for night levels estimation in urban environments is studied. The development of a practical framework for strategic noise mapping is considered in [
52], while, in [
4], a noise mapping in the EU is studied using models and procedures. An analysis of road traffic noise propagation is reported in [
5], and strategic noise maps and action plans in Navarre (Spain) are presented in [
6]. Advances in the development of common noise assessment methods in Europe, within the CNOSSOS-EU framework for strategic environmental noise mapping, is discussed in [
53]. A measurement network for urban noise assessment, reporting a comparison of mobile measurements and spatial interpolation approaches, is discussed in [
54]. Questions on the soundscapes of a built environment are considered in [
7]. A Probabilistic modeling framework for multisource sound mapping is studied in [
8]. Strategic noise maps and action plans for the reduction of population exposure in a Mediterranean port city are discussed in [
55]. Kriging-based spatial interpolation from measurements for sound level mapping in urban areas is studied in [
56], and dynamic traffic noise maps based on noise monitoring and traffic speed data are presented in [
57]. An interesting approach regards the construction of density kernel maps on geo-crowdsourced sound level data in support of community facilities’ planning [
58], and the application of machine learning techniques to include honking effects in vehicular traffic noise prediction [
59].
Finally, there are several studies on the statistical analysis of noise which we briefly refer to. A basic reference is the book by Cohen [
60] discussing statistical power analysis for the behavioral sciences. A model for the perception of environmental sound based on notice-events is discussed in [
61], while, in [
62], an analysis of nocturnal noise stratification is presented. In [
63], Licitra et al. review ways of prioritizing process in action plans, while a statistical analysis of noise levels in urban areas is discussed in [
64].
2.2. Innovative Characteristics of the Dynamap System
The usual approach to real-time noise mapping consists of implementing a network of fixed sensors that collect noise data continuously, transmitting them to a data center for the analysis. The latter is performed by using a traffic noise model software (Cadna) which rescales some pre-computed partial noise maps according to the measured data. Each monitoring station can, in principle, identify each relevant single noise source such as road, railway, etc. Then, the new rescaled partial maps are summed up together in order to build a new noise map of the whole area, which is periodically updated on a web site. Thanks to this approach, it is possible to achieve a clear and understandable real-time graphic picture of the noise distribution in the monitored area, thus building up a kind of acoustic ‘consciousness’ in the citizens.
Unfortunately, the application of such real-time noise mapping is limited to small areas because of the high cost of both: the monitoring stations (implementing expensive features not needed for the main scope of the network) and noise model software (which should run continuously to obtain real-time maps). Moreover, the available systems compute and publicly update only noise maps, but no other environmental parameters such as vibrations, temperature, humidity, UV, CO, NOx, PM10, etc., with no possibility to drive any real-time action to control unhealthy situations in the form of variable road message panels, dynamic speed limits, etc.
In view of this situation, the Dynamap real-time mapping approach [
65,
66,
67], which uses purposely developed low cost monitoring stations and does not require a continuously running complex software, can be considered as the missing link between a well consolidated technology and the need for a cheaper and scalable system to map noise and other environmental pollution parameters.
Specifically, the Dynamap network is built on a reduced number (few dozens) of noise stations, distributed appropriately within the monitored urban zone, continuously recording noise data at 1 s resolution [
68,
69,
70]. The system has a recognition algorithm for the removal of spurious noise and easy to read updated noise maps on a website endowed with a geographic information system (GIS). Therefore, the project confirms its compliance with END requirements for both noise map production and information to citizens.
Moreover, anomalous sound events have to be detected and eliminated from the recording signals in order to build up a robust system where the measured levels used for maps scaling are not affected by occasionally or external events that could lead to unreliable results. The intrinsic complexity of the environmental sound recognition problem has been approached with novel techniques and tested successfully in many different circumstances. Indeed, environmental sounds present a structure and characteristics very different from those of, say, speech and music to name the two types of sound sources for which recognition techniques have been mostly developed. For this reason, trying to recognize environmental sounds by just adapting well-established approaches to music or speech recognition is a suboptimal way to proceed. On the contrary, it becomes necessary to devise specific recognition strategies to tackle this kind of problem [
71,
72,
73,
74,
75,
76].
2.3. The Spatial and Temporal Structure of Road Traffic Noise in Large Urban Zones
Monitoring road traffic noise has become a widespread technique to assess the impact of noise on public health in large cities, drawing a great deal of attention to researchers in this field. For example, the temporal and spatial variability of road traffic noise in the city of Toronto (Canada) has been studied in quite a lot of detail [
77]. Real-time measurements of road traffic noise at about 600 locations across the city have been collected over a period of six months. It was observed that noise variability was predominantly spatial in nature, rather than temporal, accounting for 60% of the total observed variations in traffic noise. Traffic volume, length of road stretch, and industrial area were identified as the three most important factors explaining such spatial variability of noise. This suggests that there is a well defined spatial structure of noise associated with different types of roads.
An efficient noise control approach has been discussed, leading to a classification of given locations, in particular in sensitive areas, according to the different prevailing traffic conditions. An expert system, based on machine learning type of algorithms, is developed aimed at classifying urban locations based on their traffic composition. The procedure was tested on a full database from the city of Granada (Spain) [
78], including urban locations with road traffic as the dominant noise source, suggesting useful tools for addressing problems related to traffic noise, and also how to mitigate them.
It has been also shown that categorization is a powerful method for describing urban sound environments within a district of the city of Marseille (France) [
79]. The method is based on a statistical clustering analysis selecting relevant noise indicators for a better classification of sound environments. The clustering analysis shows that a limited number of indicators is sufficient to discriminate between sound environments. Such theoretical studies, relying on noise monitoring data, have been used to construct urban noise maps as an attempt to estimate the actual population exposure to environmental noise, and, eventually, being able to identify the most appropriate mitigation actions. Furthermore, automatic sound recognition (ASR) techniques have been reviewed [
80], showing that, similarly to speech recognition systems, the robustness of ASR largely depends on the choice of feature(s) and classifier(s). The review provides an overview of its past and recent applications such as sound event recognition, audio surveillance, and environmental sound recognition.
A model-based interpolation method to calculate dynamic noise maps, for medium-density noise monitoring networks, has been proposed [
81]. The model is able to track varying sound powers over time, and can also account for temporal variations in the sound propagation conditions. Both equivalent levels and percentile noise levels are considered, and the basic assumption is that there is a reasonably good model for predicting sound indicators in the area under study. The model is, however, not very accurate for instantaneous level prediction, as inaccuracies may occur in the emission of the source but also in the calculated propagation path. The interpolation tunes the source and propagation properties on the basis of measurements, and in that way one may improve the predictions at locations where no measurements are available.
2.3.1. Classification of Roads in Large Urban Zones by Their Road Traffic Noise
It is well known that on a given road stretch traffic noise is strongly dependent on the type of traffic flow along it. The relationship between noise and flow is rather complex, and several models have been employed to understand it. In particular, the dependence of noise on the speed of vehicles is an issue (see, e.g., [
19,
20]), and the classification of roads can be more complex than official records based on just standard considerations. Indeed, a careful study shows that, in the case of the official Italian roads classification, a more fundamental approach is required [
65,
66,
67].
Based on these studies, and on those mentioned in the introductory discussion of
Section 2.3, we develop a spatio-temporal method for road traffic noise based on the fact that vehicular flow forms a rather robust network, in the sense that its structure, and thereby the local road traffic flow, does not change significantly from day to day for working days. This allows us to classify the road stretches according to their mean daily traffic flows, while treating the traffic variations as a kind of perturbation from the mean values. In particular, we consider as noise sources just the road traffic noise in the form of both light and heavy vehicles, discarding all non-traffic-related noises (see the procedure described in
Section 3.3.1).
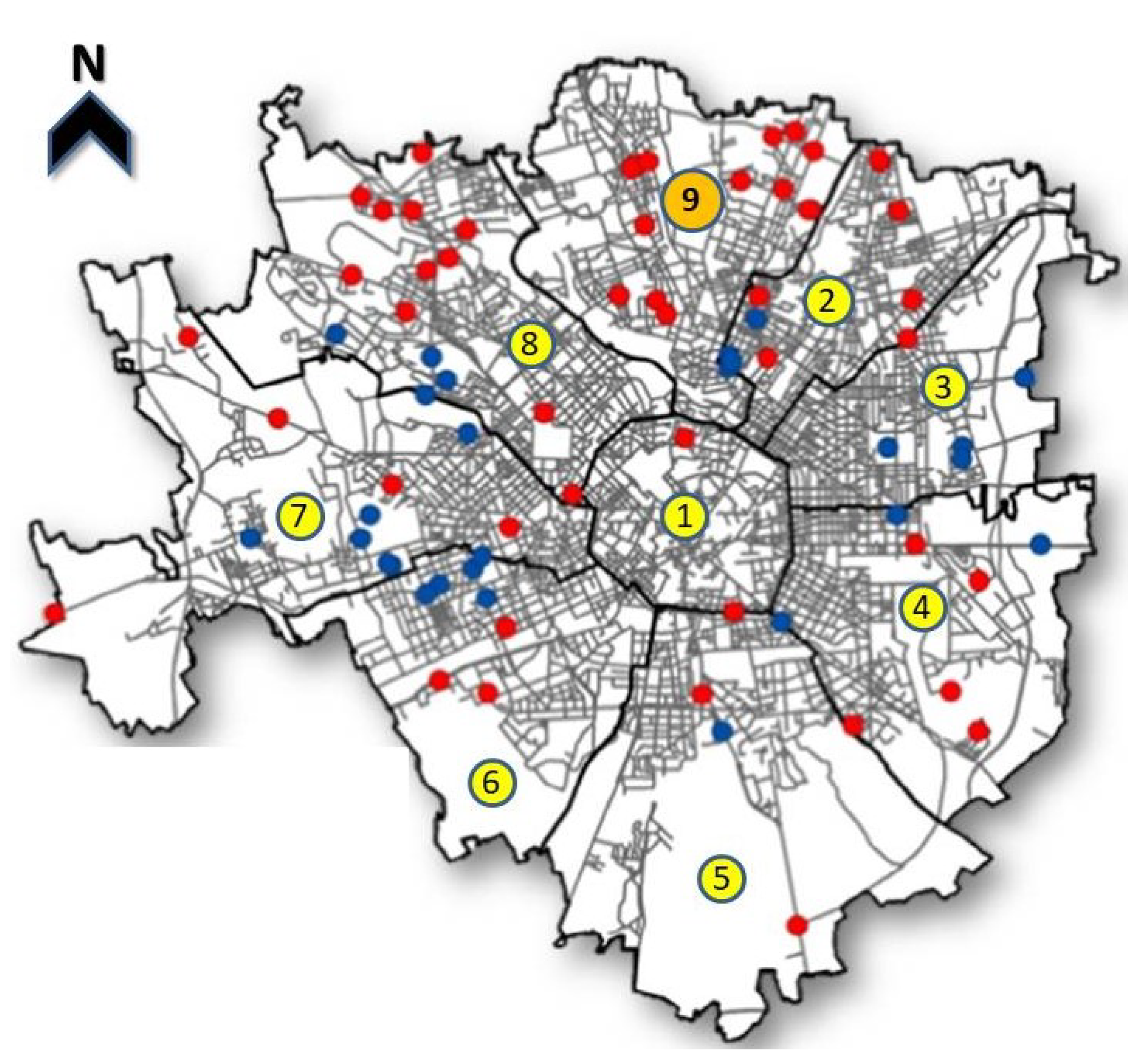
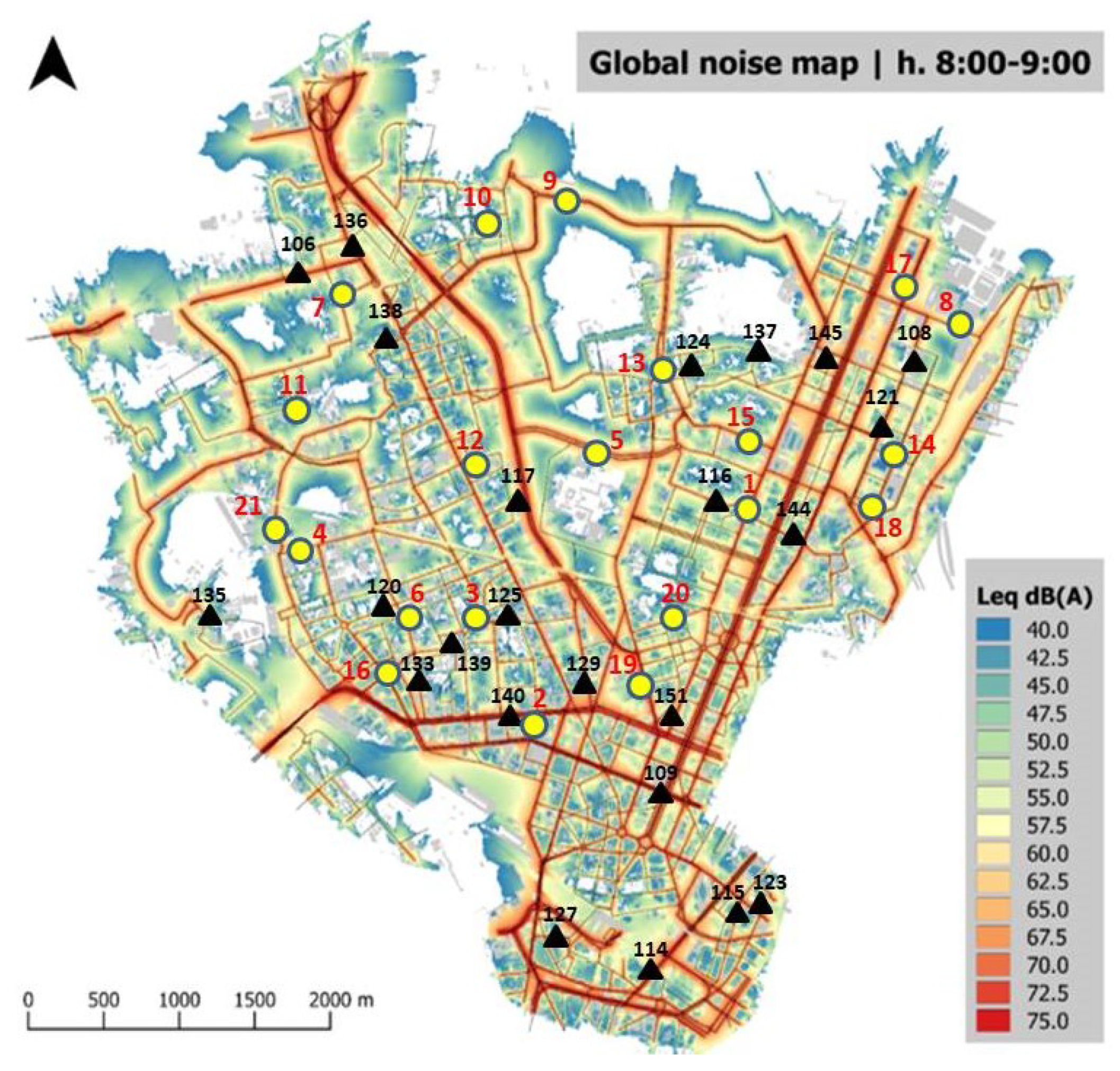
In order to build the method, we rely on measurements of both traffic noise and flow within a large urban zone, in our case the city of Milan [
68]. The measurement locations, chosen more or less at random, cover the whole city quite uniformly (see
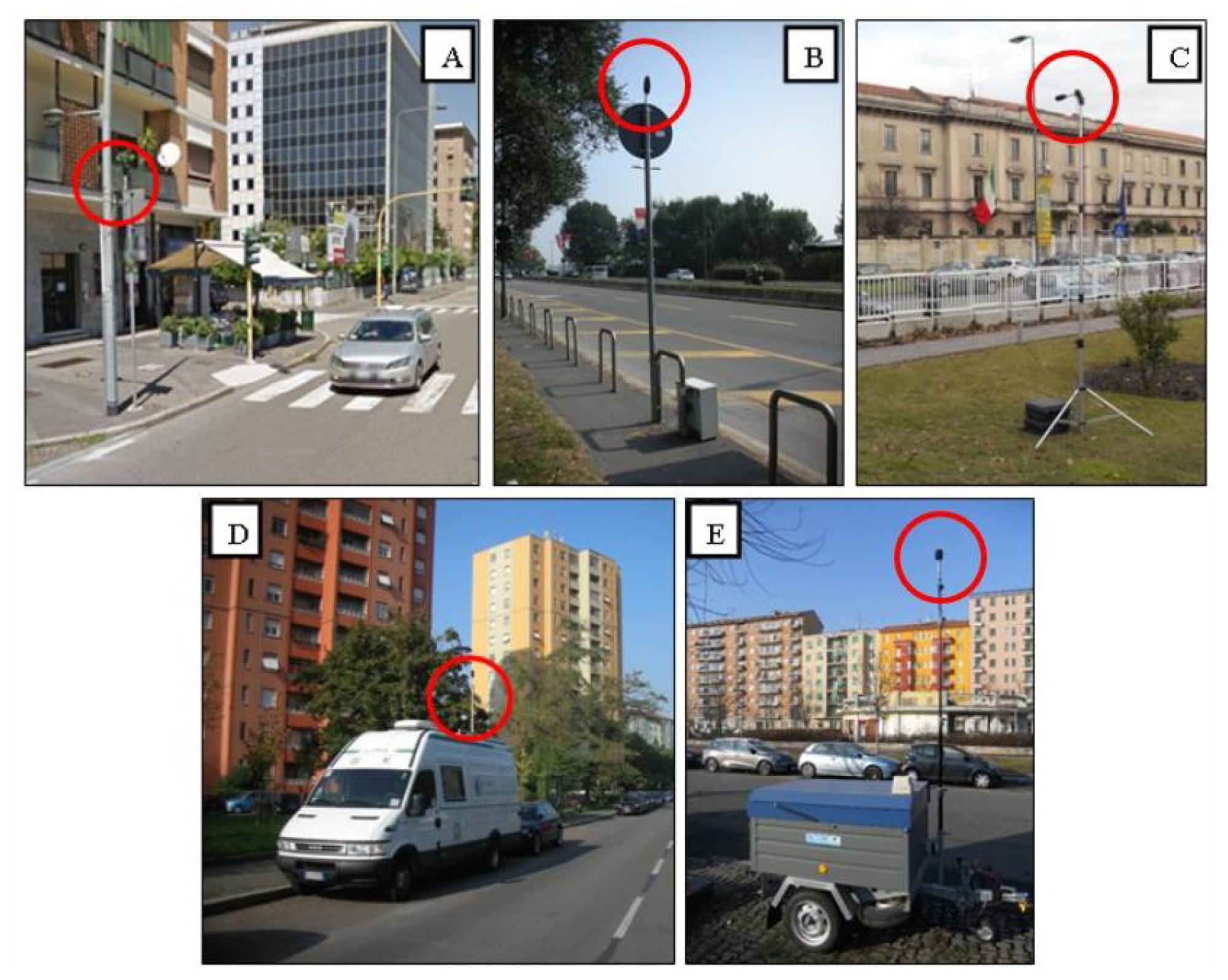
Figure 1). Later, we will describe an optimized procedure to find suitable locations for the measurements, but a random choice is a good one to start with. The type of noise monitoring stations used are illustrated in
Figure 2.
The measured signals at 1 s resolution [
68] were integrated to obtain the equivalent levels
, where
is the temporal interval of interest,
(
) is the time within the day at resolution
, and
(with
) is the
ith measurement site. In our case, we have a total of
measurement sites. Regarding the time intervals, we consider
(5, 15, 60) min for most of our analysis.
Since different sites
have different traffic noise environments, yielding different absolute
values, it is convenient to consider the deviations,
, of the latter with respect to some reference value,
, typical of the site location
, given by
In this way, we can study traffic noise behavior at different sites by studying the associated deviations along the whole day, which we denote as a normalized noise profile. In our preliminary studies, we take the reference time interval to be
h. As a reference level, we considered for each site
the daily equivalent level calculated over the period (6:00–10:00 p.m.) [
68].
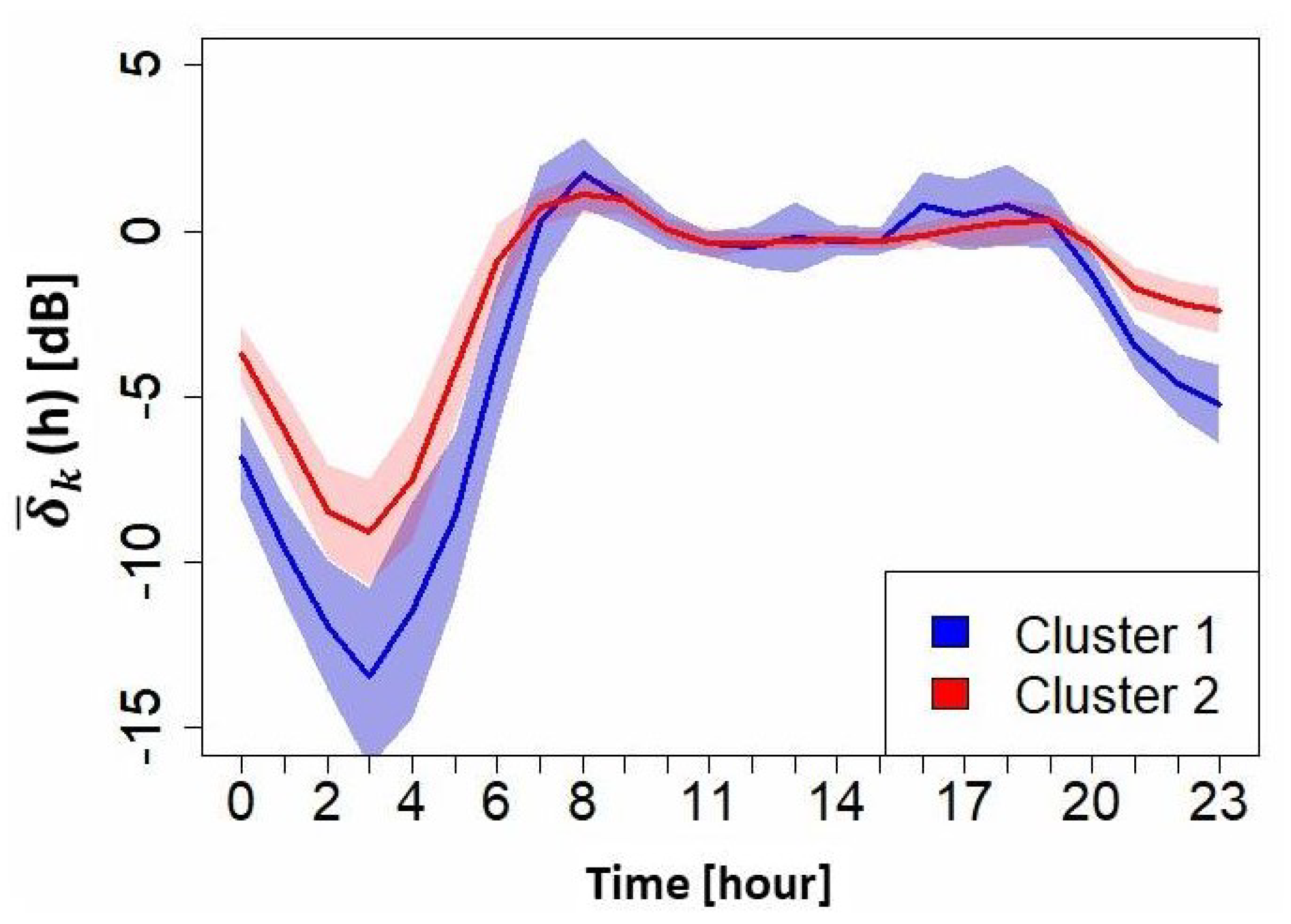
Once the noise profiles have been obtained, a visual analysis shows that strong similarities among profiles occur, suggesting an underlying organization into groups of sites. This organization is different from the standard legislative categorization of roads, as analyzed in some studies [
13,
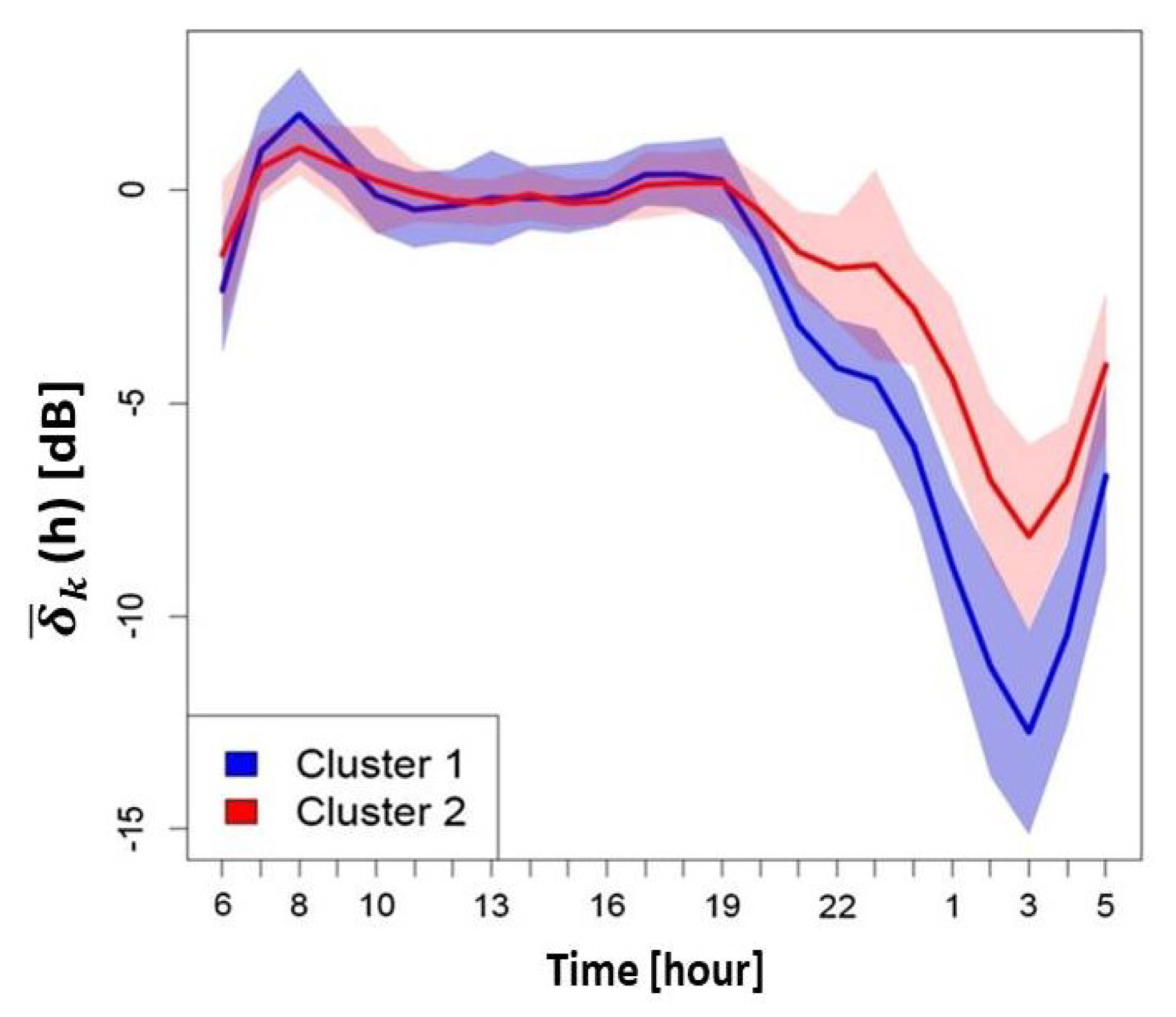
14]. For this reason, an unsupervised clustering algorithm was applied to disclose the internal structure of the measurement sites in terms of their normalized noise profiles. The clustering analysis is described in detail in [
65,
68], where a description in terms of only two clusters is found to be satisfactory. The clusters are labeled with the index
, and the mean hourly cluster profiles denoted as
. The results are shown in
Figure 3.
Although both clusters display similar mean profiles, they are statistically different [
65,
68]. Roughly speaking, they differ during the night, as manifested by the larger drop in
with respect to
in
Figure 3. Qualitatively, this is due to the fact that traffic flow on road stretches belonging to cluster 1 diminishes much more than on road stretches in cluster 2 during night hours. In other words, cluster 1 roads are lower traffic stretches whose flows decrease more prominently during night periods. On the contrary, road stretches in cluster 2 possess a relatively large traffic flow even during the night. The former represent secondary streets in predominantly residential areas, while the latter main city arteries. In order to characterize the traffic flow of roads, we need to address the issue of vehicles flow within the urban zone. This will require us to define a non-acoustic parameter associated with each road stretch.
2.3.2. Classification of Roads in Large Urban Zones by Their Traffic Flow
Mean hourly values of traffic flow in a given road stretch within the city of Milan are available thanks to the data provided by the EMTA, which is in charge of the traffic mobility management of the city (see [
11,
65] for further details). The simulation model provides the traffic flow rate, or mean number of vehicles per hour,
, at hour
t of the day and road stretch location
s. We have found that it most convenient to take the mean daily total traffic flow,
, as our candidate to classify traffic flow on road stretches. Specifically, we define our non-acoustic parameter, denoted simply as
x, according to
It is interesting to observe that one can also apply a clustering method, as we did for the noise in
Section 2.3.1, to the traffic flow using the mean daily hourly flow rates produced by the Cadna-EMTA model. We will not discuss this possibility here, but, for details, we refer to [
65]. In addition, other issues related to this model can be found in the literature [
69,
70,
82].
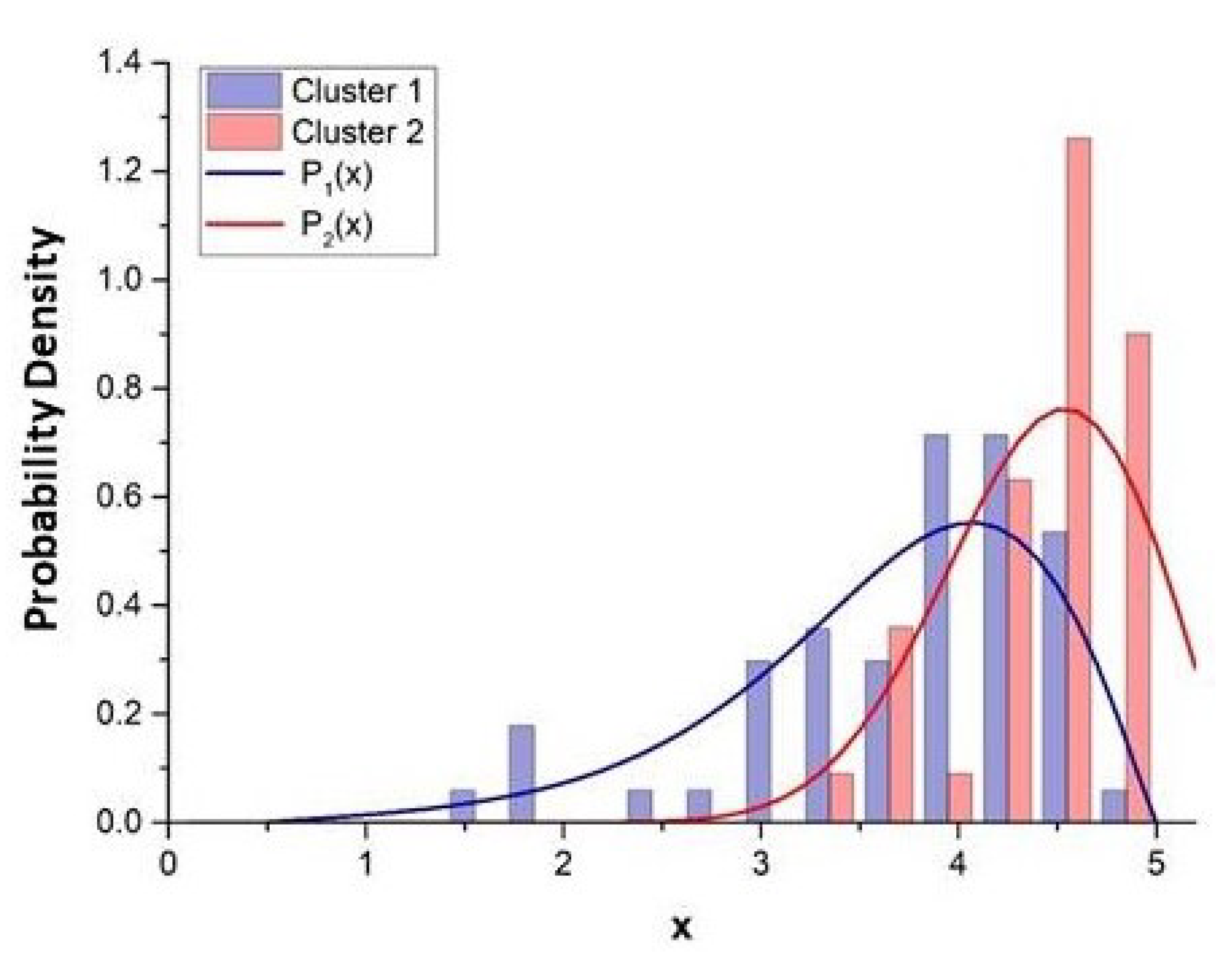
The knowledge of the non-acoustic parameter for each road stretch within the urban zone allows us, in particular, to associate a value of
x with each road within the two clusters, denoted as
and
, found from the analysis of traffic noise in
Section 2.3.1. Therefore, we are in the position of obtaining the distribution functions,
and
, within each cluster. The results are shown in
Figure 4.
Since the distribution functions are strongly overlapping, it is more appropriate to consider the probability that a given
x value belongs to either
or
, denoted as
and
, respectively, i.e.,
The idea behind this representation is that one can ‘interpolate’ between the normalized mean cluster profiles,
,
, in order to estimate the profile,
, on a road stretch at site
s characterized by a non-acoustic parameter
, which is given by the relation,
2.3.3. Groups of Roads Defined by Their Daily Total Traffic Flow
For building the Dynamap network upon a finite number of dynamical maps, and in particular within the pilot zone 9, it is convenient to define groups of road stretches, denoted as
, according to their
x values, Equation (
2). We consider six groups (
) for Z9, which are defined in such a way to contain approximately the same number of road stretches in each group. They are reported in
Table 1 [
83]. Thus, Dynamap [
83,
86] generalizes the standard categorization of roads discussed in
Section 2.3.
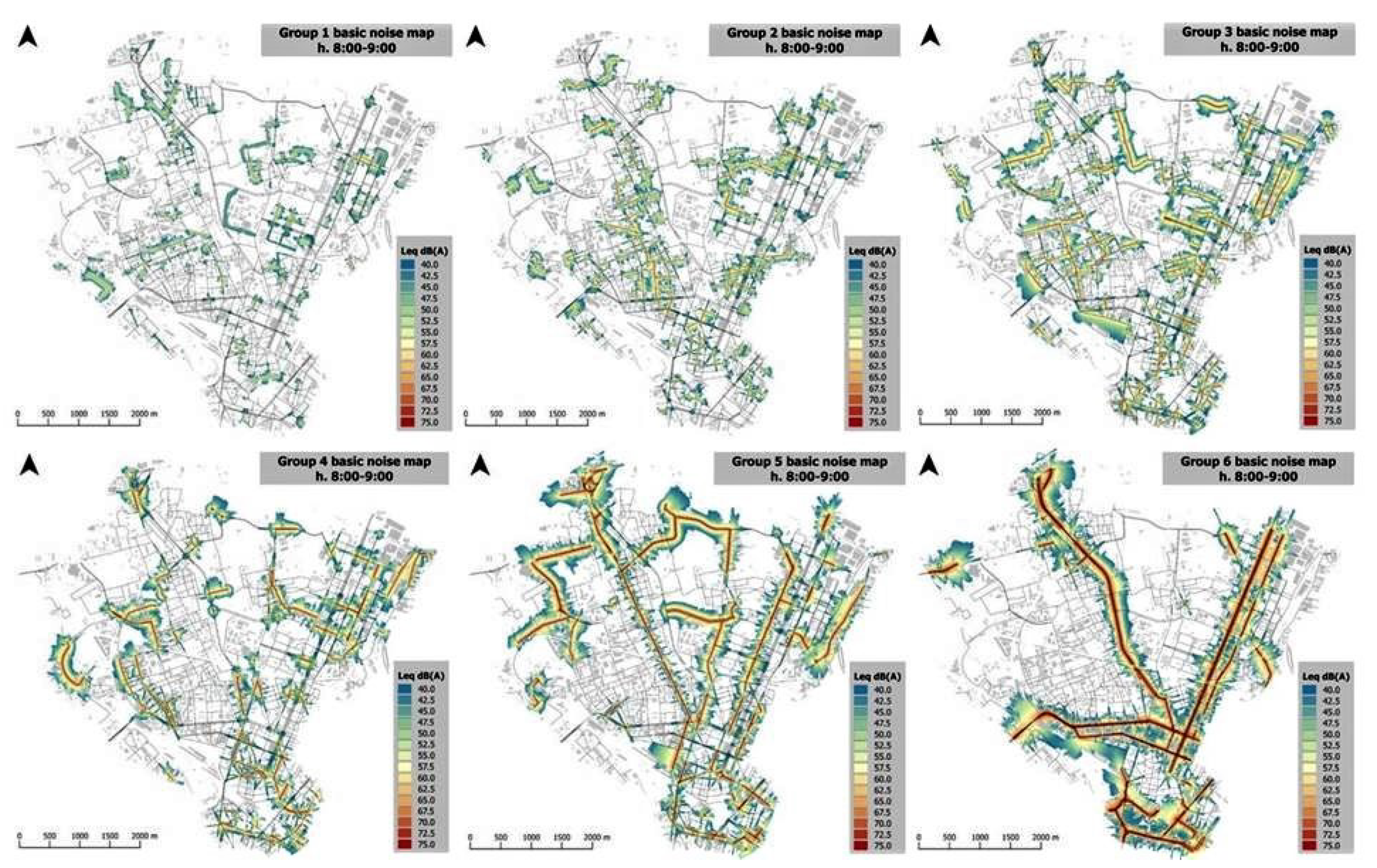
Using the values of traffic noise calculated from the modeled traffic flows (see [
86] for details), we display the equivalent noise levels at each road stretch
s in zone 9 of the city of Milan,
, obtained at the ‘rush hour’
(8:00–9:00) a.m., for each one of the six groups
(
), denoted as the basic traffic noise maps (see
Figure 5).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}