
Fault Detection for Pitch System of Wind Turbine-Driven Doubly Fed Based on IHHO-LightGBM



Abstract
:1. Introduction
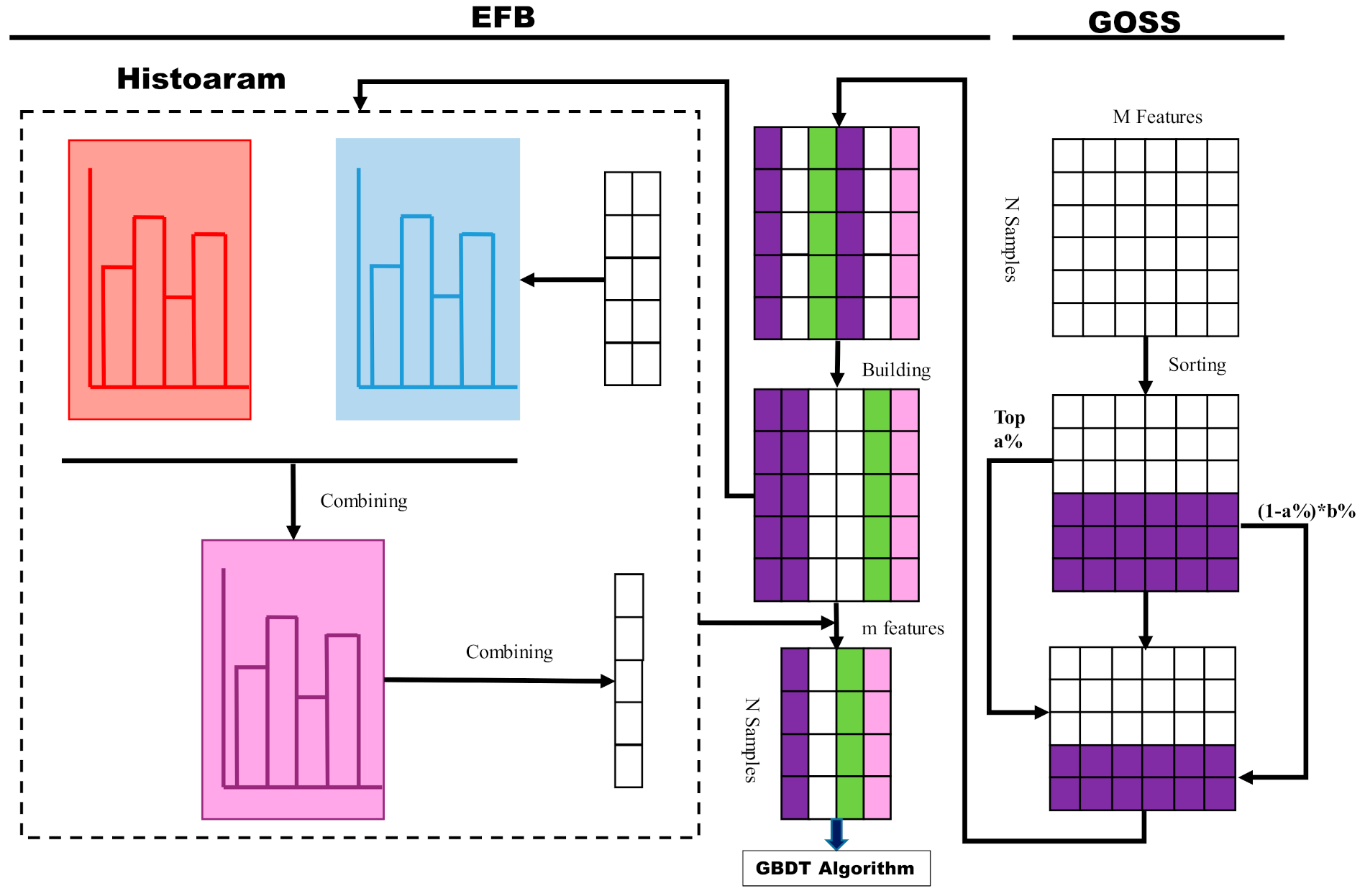
2. Light Gradient Boosting Machine
3. Harris Hawks Optimizer
3.1. Search Stage
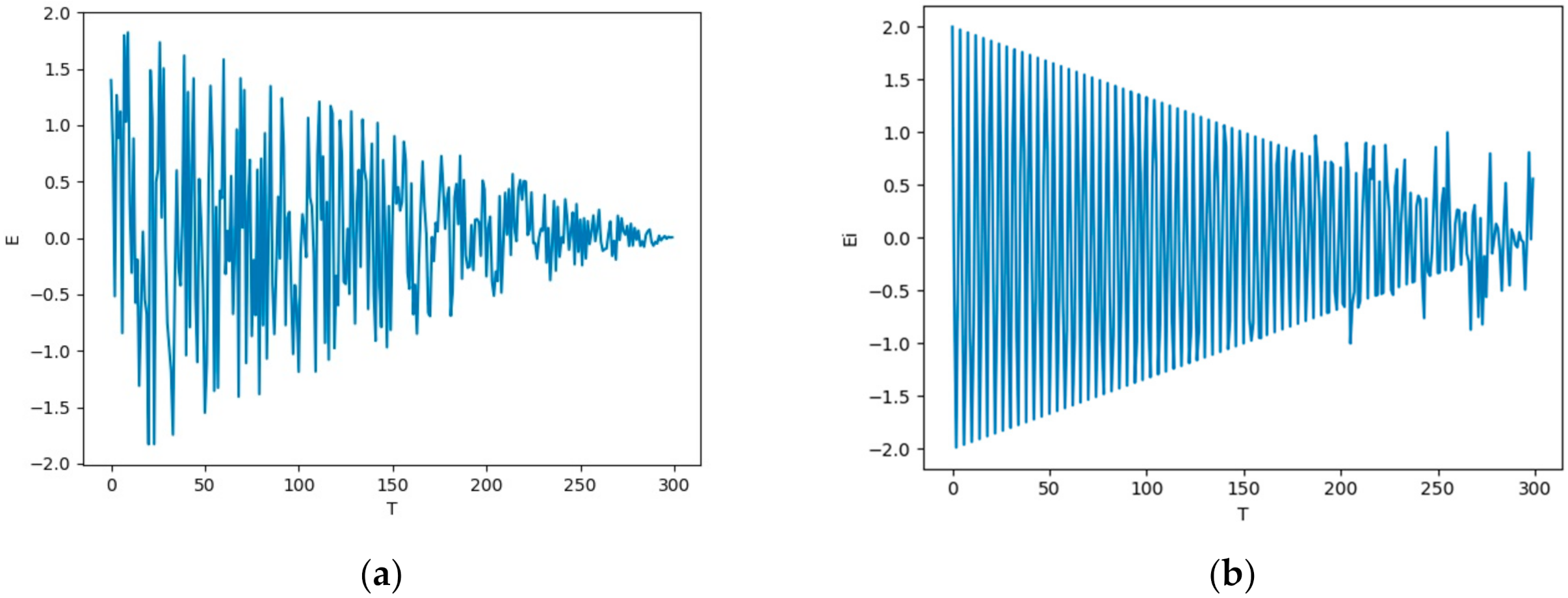
3.2. Transition Stage—Trigonometric Function Model-Based Escape Energy Strategy
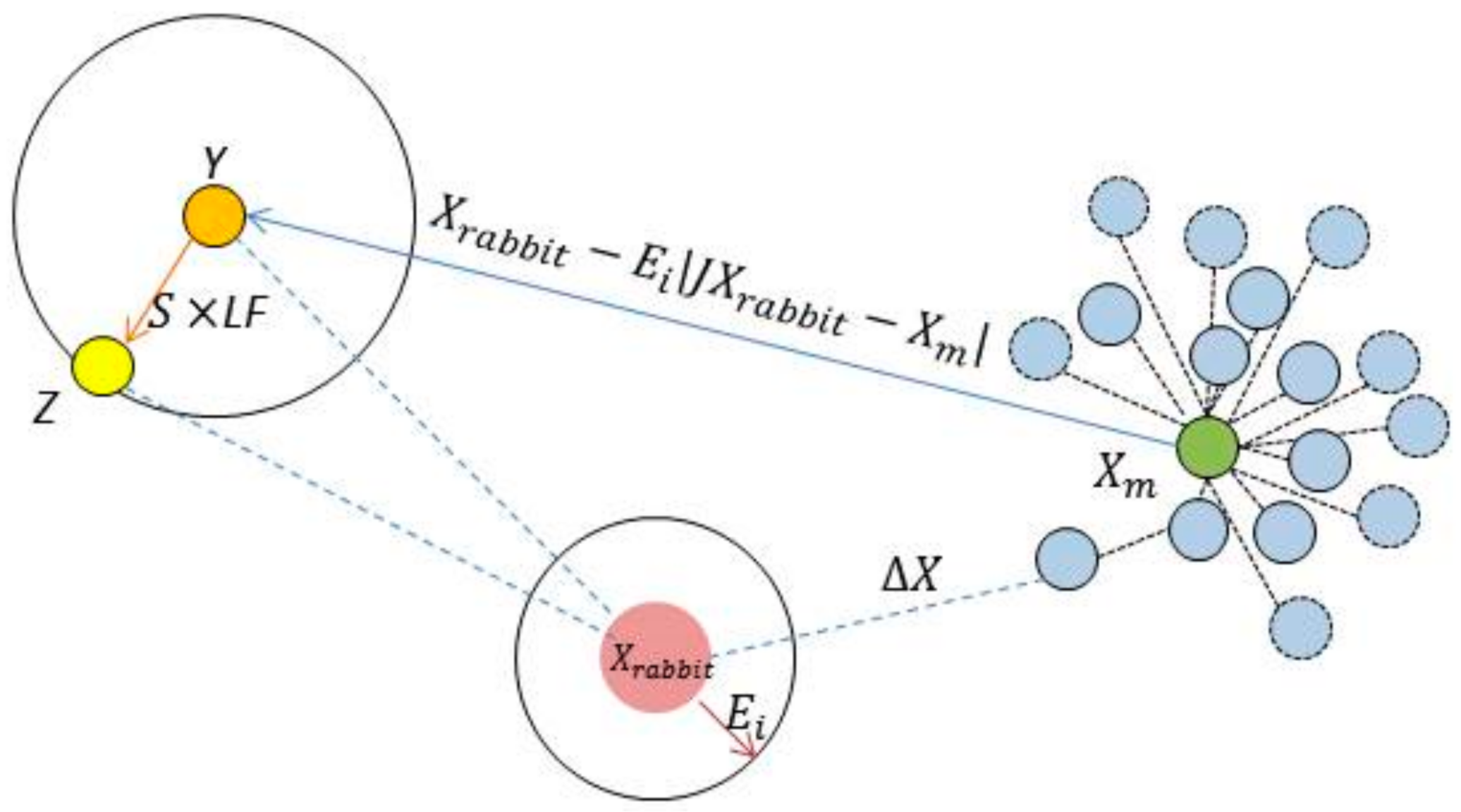
3.3. Development Stage
3.3.1. Soft Siege
3.3.2. Hard Siege
3.3.3. Soft Siege of Gradual Fast Dive
3.3.4. Hard Siege of Gradual Fast Dive
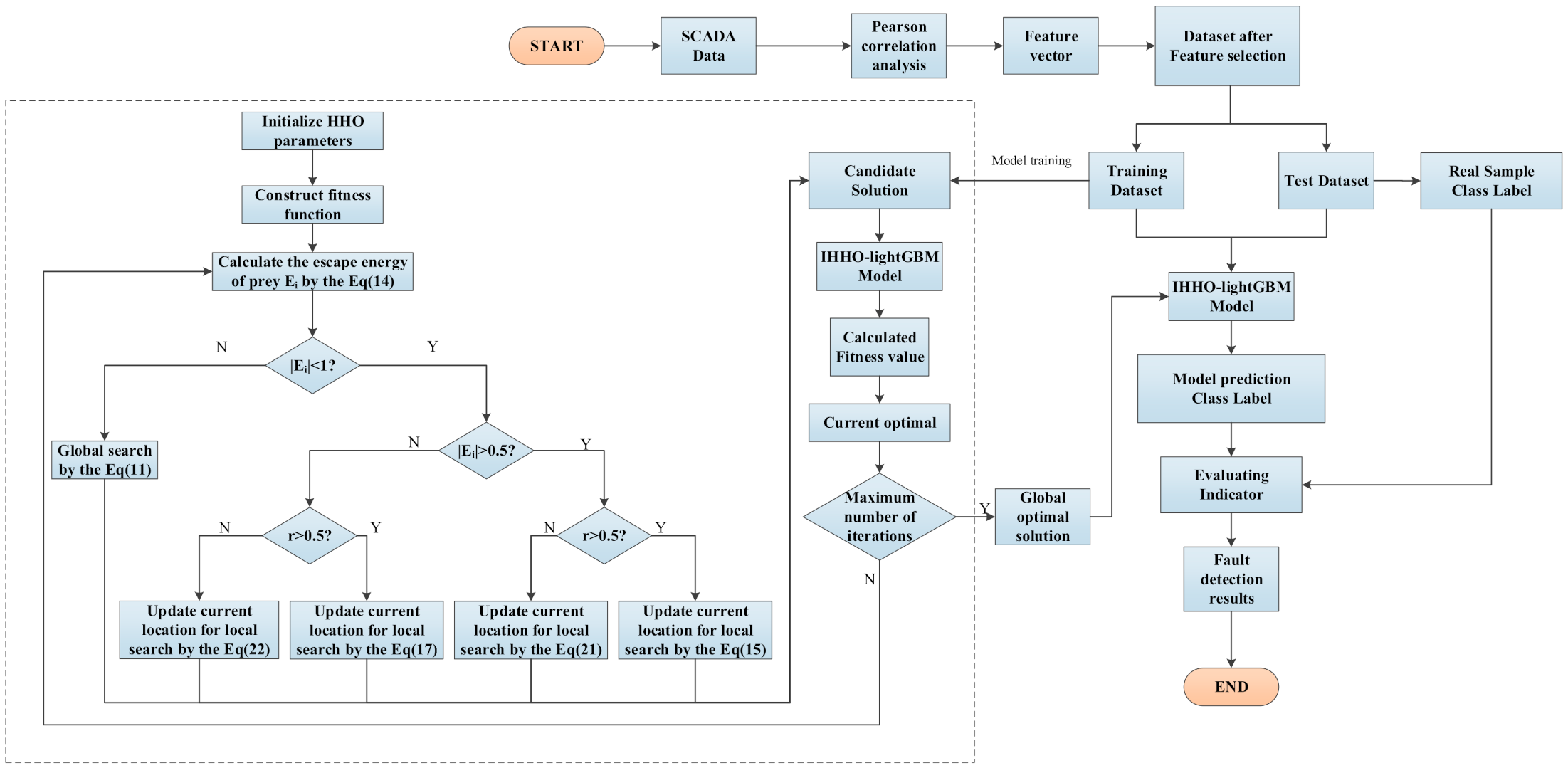
4. IHHO-LightGBM Fault Detection Model
4.1. Data Cleaning and Preprocessing
4.2. Optimization of Algorithm Flow
4.3. Pseudo-Code of Optimization Algorithm
| Algorithm 1 IHHO-LightGBM algorithm |
| Inputs: , HHO(objf, lb, ub, dim, SearchAgents_no, Max_iter), |
| LightGBM(,) |
| Outputs: FAR, FNR, F1-score |
| 1: Initialize the random population Xi(i = 1, 2, …, N) |
| 2: while (stopping condition is not met) do |
| 3: Calculate the fitness values of hawks |
| 4: Set as the location of rabbit (best location) |
| 5: for (each hawk (Xi)) do |
| 6: Update the initial energy E0 and jump strength J |
| 7: Update the using Equation (14) |
| 8: if (|| ≥ 1) then |
| 9: Update the location vector using Equation (11) |
| 10: if (|| < 1) then |
| 11: if (r ≥0.5 and || ≥ 0.5) then |
| 12: Update the location vector using Equation (15) |
| 13: else if (r ≥0.5 and || < 0.5) then |
| 14: Update the location vector using Equation (17) |
| 15: else if (r <0.5 and || ≥ 0.5) then |
| 16: Update the location vector using Equation (21) |
| 17: else if (r <0.5 and || < 0.5) then |
| 18: Update the location vector using Equation (22) |
| 19: Return |
| 20: |
| 21: |
| 22: |
| 23: |
5. Fault Detection of Wind Turbine-Based Pitch Control System
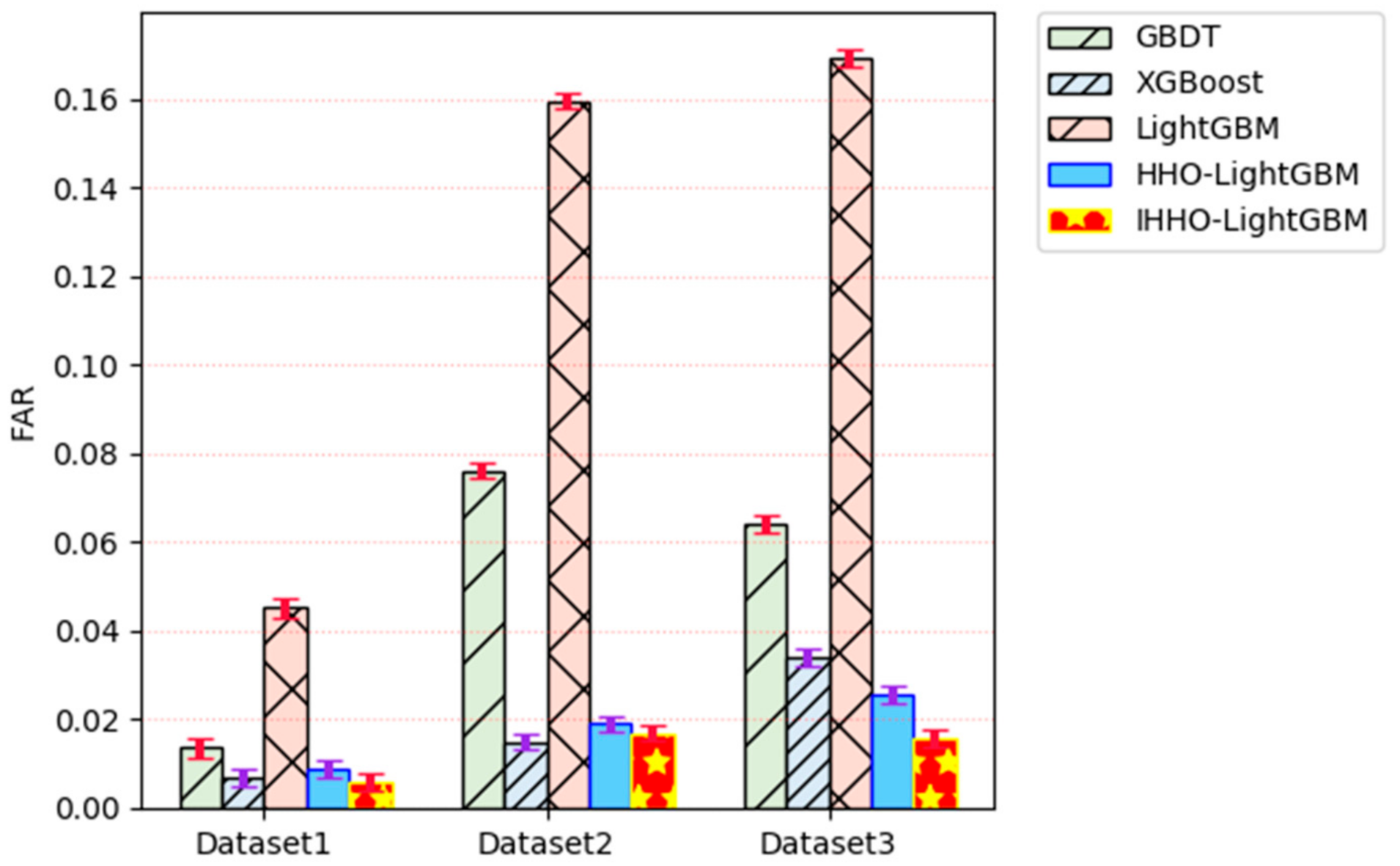
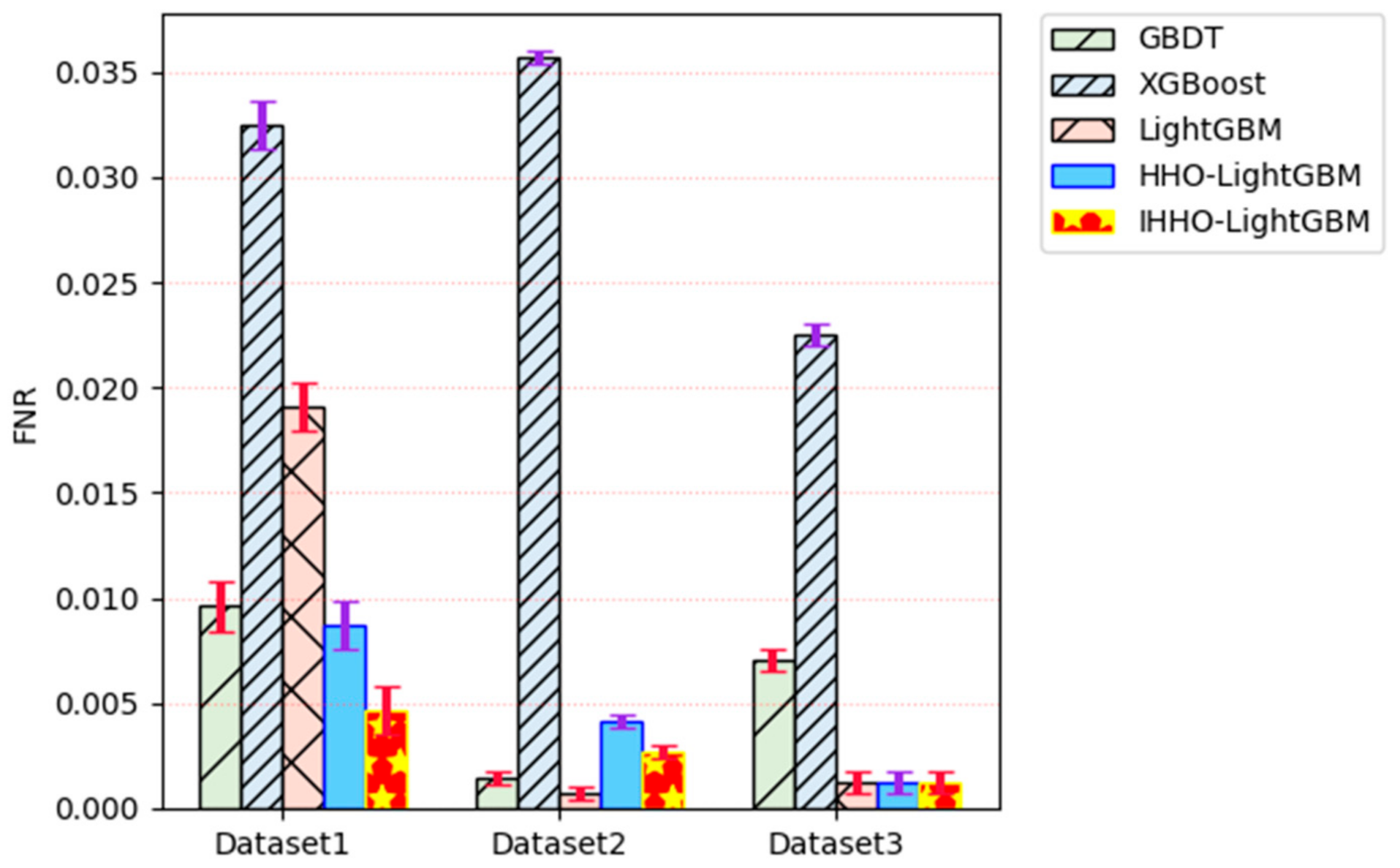
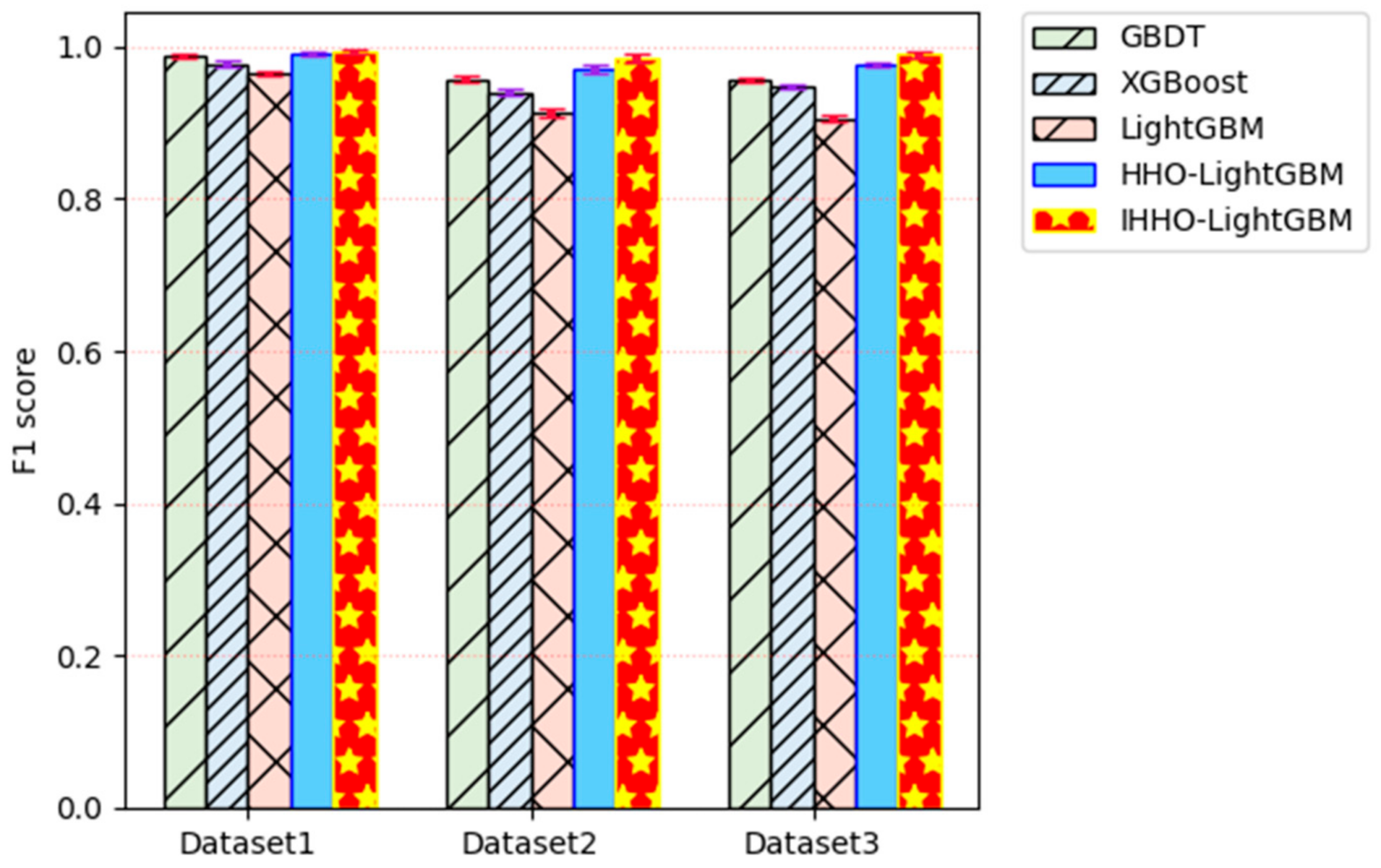
5.1. Performance Evaluation Index of Fault Detection Model
5.2. Experimental Results
6. Conclusions
- (1)
- The trigonometric function model is introduced into HHO to update the prey escape energy, so as to balance the global exploration ability and local development ability of the algorithm, and to overcome the problem that the original HHO algorithm is easy to fall into local optimization;
- (2)
- A fault detection method of the wind turbine-based pitch control system, based on improved HHO-LightGBM, is proposed. In this model, the false alarm rate of fault detection is used as the fitness function, and two parameters of LightGBM are used as the optimization objects of the improved Harris Hawks optimization algorithm, to optimize the parameters, so as to achieve the global optimal parameters to improve the fault detection model performance and apply it to the actual fault detection of the pitch control system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cui, Q.; Liu, Y.; Ali, T.; Gao, J.; Chen, H. Economic and climate impacts of reducing China’s renewable electricity curtailment: A comparison between CGE models with alternative nesting structures of electricity. Energy Econ. 2020, 91, 104892. [Google Scholar] [CrossRef]
- Global Wind Energy Council. GWEC| GLOBAL WIND REPORT 2021. Available online: https://gwec.net/global-wind-report-2021/ (accessed on 1 March 2021).
- Tavner, P.; Qiu, Y.; Korogiannos, A.; Feng, Y. The correlation between wind turbine turbulence and pitch failure. In Proceedings of the European Wind Energy Conference and Exhibition, Brussels, Belgium, 14–17 March 2011; pp. 94–96. [Google Scholar]
- Yin, X.; Zhang, W.; Jiang, Z.; Pan, L.J.M.S.; Processing, S. Adaptive robust integral sliding mode pitch angle control of an electro-hydraulic servo pitch system for wind turbine. Mech. Syst. Signal Process. 2019, 133, 105704. [Google Scholar] [CrossRef]
- He, L.; Hao, L.; Qiao, W. Remote Monitoring and Diagnostics of Pitch Bearing Defects in a MW-Scale Wind Turbine Using Pitch Symmetrical-component Analysis. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 1–6. [Google Scholar]
- Sales-Setién, E.; Peñarrocha-Alós, I. Robust estimation and diagnosis of wind turbine pitch misalignments at a wind farm level. Renew. Energy 2020, 146, 1746–1765. [Google Scholar] [CrossRef]
- Kusiak, A.; Verma, A. A Data-Driven Approach for Monitoring Blade Pitch Faults in Wind Turbines. IEEE Trans. Sustain. Energy 2010, 2, 87–96. [Google Scholar] [CrossRef]
- Astolfi, D. A Study of the Impact of Pitch Misalignment on Wind Turbine Performance. Machines 2019, 7, 8. [Google Scholar] [CrossRef] [Green Version]
- Pérez, J.M.P.; Márquez, F.P.G.; Tobias, A.; Papaelias, M. Wind turbine reliability analysis. Renew. Sustain. Energy Rev. 2013, 23, 463–472. [Google Scholar] [CrossRef]
- Cho, S.; Gao, Z.; Moan, T. Model-based fault detection, fault isolation and fault-tolerant control of a blade pitch system in floating wind turbines. Renew. Energy 2018, 120, 306–321. [Google Scholar] [CrossRef]
- Yin, S.; Ding, S.X.; Haghani, A.; Hao, H.; Zhang, P. A comparison study of basic data-driven fault diagnosis and process monitoring methods on the benchmark Tennessee Eastman process. J. Process. Control 2012, 22, 1567–1581. [Google Scholar] [CrossRef]
- Xi, L.; Wu, J.N.; Xu, Y.C.; Sun, H.B. Automatic Generation Control Based on Multiple Neural Networks With Actor-Critic Strategy. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 2483–2493. [Google Scholar] [CrossRef]
- Nazir, M.; Khan, A.Q.; Mustafa, G.; Abid, M. Robust fault detection for wind turbines using reference model-based approach. J. King Saud Univ.-Eng. Sci. 2017, 29, 244–252. [Google Scholar] [CrossRef] [Green Version]
- Han, W.; Wang, Z.; Shen, Y. Fault estimation for a quadrotor unmanned aerial vehicle by integrating the parity space approach with recursive least squares. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 232, 783–796. [Google Scholar] [CrossRef]
- Jung, C.; Schindler, D. Wind speed distribution selection—A review of recent development and progress. Renew. Sustain. Energy Rev. 2019, 114, 13. [Google Scholar] [CrossRef]
- Witczak, M.; Rotondo, D.; Puig, V.; Nejjari, F.; Pazera, M. Fault estimation of wind turbines using combined adaptive and parameter estimation schemes. Int. J. Adapt. Control. Signal Process. 2018, 32, 549–567. [Google Scholar] [CrossRef]
- Zhao, Y.Y.; Li, D.S.; Dong, A.; Kang, D.H.; Lv, Q.; Shang, L. Fault Prediction and Diagnosis of Wind Turbine Generators Using SCADA Data. Energies 2017, 10, 1210. [Google Scholar] [CrossRef] [Green Version]
- Godwin, J.; Matthews, P. Classification and Detection of Wind Turbine Pitch Faults Through SCADA Data Analysis. Int. J. Progn. Health Manag. 2013, 4. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Santos, P.; Villa, L.F.; Renones, A.; Bustillo, A.; Maudes, J. An SVM-Based Solution for Fault Detection in Wind Turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [Green Version]
- Agasthian, A.; Pamula, R.; Kumaraswamidhas, L.A. Fault classification and detection in wind turbine using Cuckoo-optimized support vector machine. Neural. Comput. Appl. 2019, 31, 1503–1511. [Google Scholar] [CrossRef]
- Pandit, R.K.; Infield, D.; Kolios, A. Comparison of advanced non-parametric models for wind turbine power curves. IET Renew. Power Gener. 2019, 13, 1503–1510. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.H.; Qian, L.Y.; Mao, B.J.; Huang, C.; Huang, B.; Si, Y.L. A Data-Driven Design for Fault Detection of Wind Turbines Using Random Forests and XGboost. IEEE Access 2018, 6, 21020–21031. [Google Scholar] [CrossRef]
- Jia, R.; Ma, F.Q.; Dang, J.; Liu, G.Y.; Zhang, H.Z. Research on Multidomain Fault Diagnosis of Large Wind Turbines under Complex Environment. Complexity 2018, 13. [Google Scholar] [CrossRef] [Green Version]
- Li, M.S.; Yu, D.; Chen, Z.M.; Xiahou, K.S.; Ji, T.Y.; Wu, Q.H. A Data-Driven Residual-Based Method for Fault Diagnosis and Isolation in Wind Turbines. IEEE Trans. Sustain. Energy 2019, 10, 895–904. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Cai, R.; Xie, S.; Wang, B.Z.; Yang, R.J.; Xu, D.S.; He, Y. Wind Speed Forecasting Based on Extreme Gradient Boosting. IEEE Access 2020, 8, 175063–175069. [Google Scholar] [CrossRef]
- Tang, M.; Ding, S.X.; Yang, C.; Cheng, F.; Shardt, Y.A.W.; Long, W.; Liu, D. Cost-sensitive large margin distribution machine for fault detection of wind turbines. Clust. Comput. 2019, 22, 7525–7537. [Google Scholar] [CrossRef]
- Long, W.; Jiao, J.J.; Liang, X.M.; Tang, M.Z. An exploration-enhanced grey wolf optimizer to solve high-dimensional numerical optimization. Eng. Appl. Artif. Intell. 2018, 68, 63–80. [Google Scholar] [CrossRef]
- Xue, B.; Zhang, M.J.; Browne, W.N. Particle Swarm Optimization for Feature Selection in Classification: A Multi-Objective Approach. IEEE Trans. Cybern. 2013, 43, 1656–1671. [Google Scholar] [CrossRef]
- Tang, M.; Hu, J.; Kuang, Z.; Wu, H.; Zhao, Q.; Peng, S. Fault Detection of the Wind Turbine Variable Pitch System Based on Large Margin Distribution Machine Optimized by the State Transition Algorithm. Math. Probl. Eng. 2020, 2020. [Google Scholar] [CrossRef]
- Safavian, S.R.; Landgrebe, D. A survey of decision tree classifier methodology. IEEE Trans. Syst. Man Cybern. 1991, 21, 660–674. [Google Scholar] [CrossRef] [Green Version]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.-Y. LightGBM: A highly efficient gradient boosting decision tree. In Proceedings of the 31st Annual Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 3147–3155. [Google Scholar]
- Chen, T.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H.L. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Castellani, F.; Astolfi, D.; Natili, F. SCADA Data Analysis Methods for Diagnosis of Electrical Faults to Wind Turbine Generators. Appl. Sci. 2021, 11, 3307. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Function | Value Range |
|---|---|---|
| the minimum number of leaf nodes and determines the complexity of the model | [2, 31] | |
| data on leaves of decision tree and deal with overfit | [50, 300] |
| Fault Type | Fault-Free | Faulty | Total Number of Features |
|---|---|---|---|
| pitch control emergency stop fault | 1828 | 1387 | 211 |
| pitch control motor fault | 4917 | 1509 | 211 |
| pitch control power supply alarm | 2854 | 852 | 211 |
| Feature | Time | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 06:15 | 06:16 | 06:17 | 06:18 | … | 08:20 | 08:21 | 08:22 | 08:23 | |
| rotor_speed | 17.47 | 17.48 | 17.47 | 17.37 | … | 17.48 | 17.45 | 17.46 | 17.45 |
| converter_motor_speed | 1750.1 | 1754.4 | 1755.1 | 1748.3 | … | 1743.4 | 1755.6 | 1749.2 | 1747.3 |
| … | … | … | … | … | … | … | … | … | … |
| converter_power | 773.1 | 710.1 | 800.2 | 794.3 | … | 810.6 | 856.3 | 877.5 | 851.3 |
| Actual | Forecast | |
|---|---|---|
| Forecast Faulty | Forecast Normal | |
| Actual Faulty | TP | FN |
| Actual Normal | FP | TN |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, M.; Peng, Z.; Wu, H. Fault Detection for Pitch System of Wind Turbine-Driven Doubly Fed Based on IHHO-LightGBM. Appl. Sci. 2021, 11, 8030. https://doi.org/10.3390/app11178030
Tang M, Peng Z, Wu H. Fault Detection for Pitch System of Wind Turbine-Driven Doubly Fed Based on IHHO-LightGBM. Applied Sciences. 2021; 11(17):8030. https://doi.org/10.3390/app11178030
Chicago/Turabian StyleTang, Mingzhu, Zhonghui Peng, and Huawei Wu. 2021. "Fault Detection for Pitch System of Wind Turbine-Driven Doubly Fed Based on IHHO-LightGBM" Applied Sciences 11, no. 17: 8030. https://doi.org/10.3390/app11178030
APA StyleTang, M., Peng, Z., & Wu, H. (2021). Fault Detection for Pitch System of Wind Turbine-Driven Doubly Fed Based on IHHO-LightGBM. Applied Sciences, 11(17), 8030. https://doi.org/10.3390/app11178030