1. Introduction
The modern tendency in the assurance of signal integrity in high-speed data transmission links is the development of transceivers with adaptive channel equalization, crosstalk cancelation, and the recovering of clock signals [
1,
2]. The high-speed circuits design is based on the feed forward and decision feedback schemes optimizing tap weights [
3]. The significant performance benefit of the transceiver was achieved by optimization that utilizes the cyclostationary properties of crosstalk [
4,
5]. The additional parameter of optimization based on the minimum mean square error (MSE) is a sampling phase.
The improvement of the transceiver structure may be produced by changing the criterion of the optimization criteria. The simulation or measurement data can be used not only for controlling eye diagrams but also for the review of the probability models [
6,
7,
8,
9]. Probability modeling of random processes can be performed by using measurement data. The proper model of the cyclostationary processes enforce the design of an effective signal processing algorithm. The processing of random signals can be based on the multimodal probability distribution using machine learning. Optimization criteria may be the maximum of the mutual information [
10]. The choice of the appropriate figure of merit allows to compare performance characteristics of different signal processing algorithms.
The verification of performance characteristics can be realized by simulation using the electronic design automation (EDA) software [
6,
7] or a direct measurement using the pseudo-random bit sequence (PRBS) generator and digital oscilloscope [
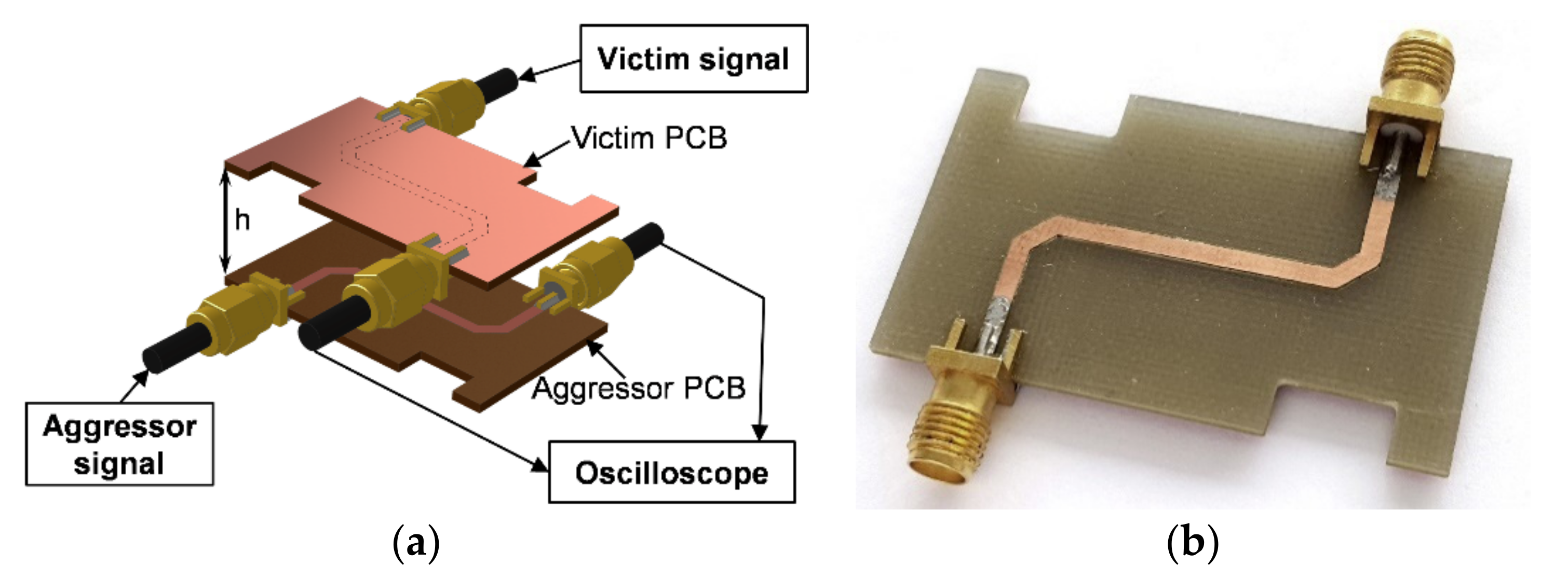
8]. The complex electromagnetic compatibility (EMC) research of the high-speed data transmission link combines the time-domain measurements of the signals in the transmission lines and near-field measurements of radiated emissions [
11]. The multichannel measurement setup provides simultaneous capturing of waveforms in parallel high-speed data transferring busses.
The bit error rate (BER) can be estimated by statistical processing of the measured or simulated waveforms. Traditionally in communications, performance is characterized by the parameter of the BER defined as the relative frequency of the error:
where
is the number of bit errors in the received data,
is the total number of transmitted bits. The BER parameter is essentially the probability of the bit error induced by the noise and interference accompanying the process of data transferring. The BER plot shows the eye diagram opening for different sampling phases during the unit interval [
12].
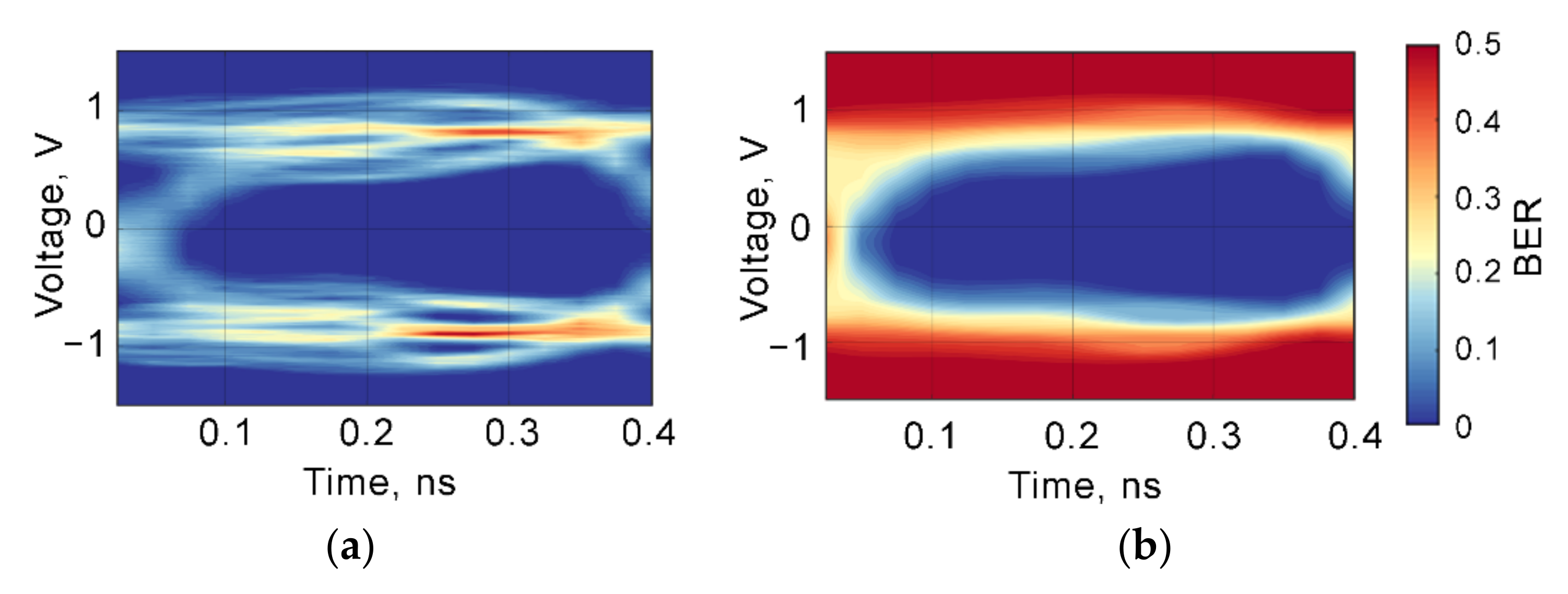
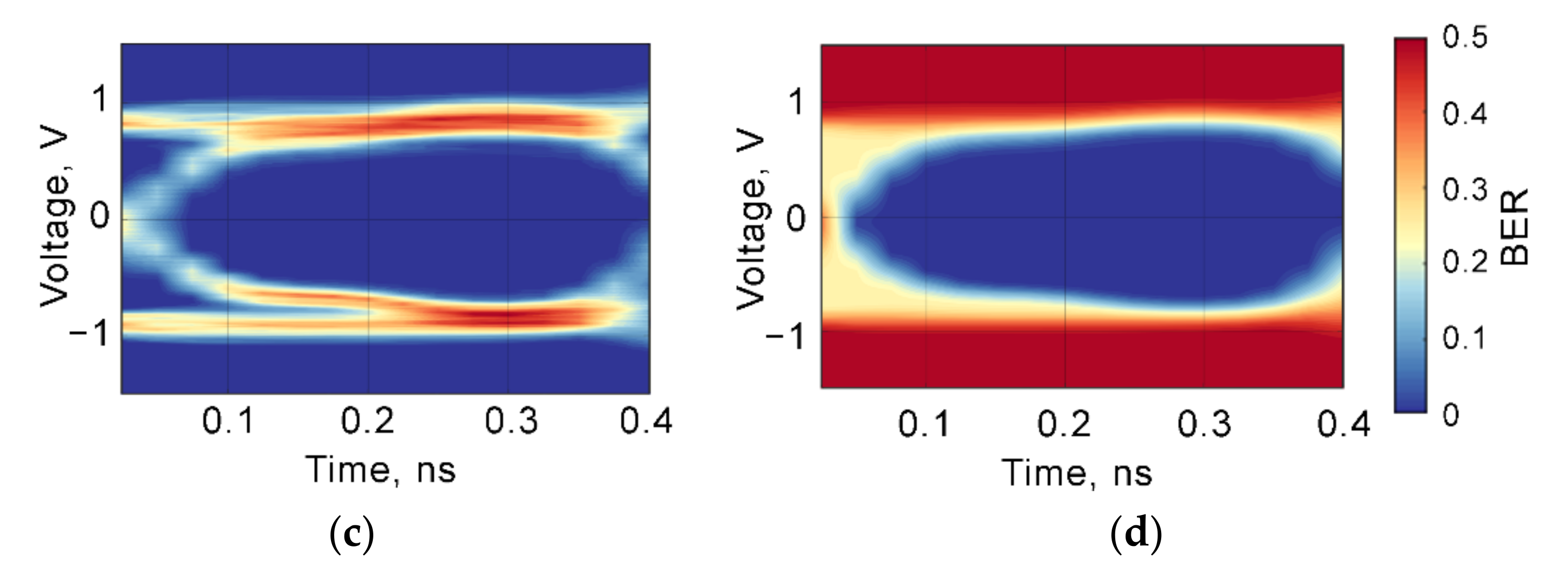
The
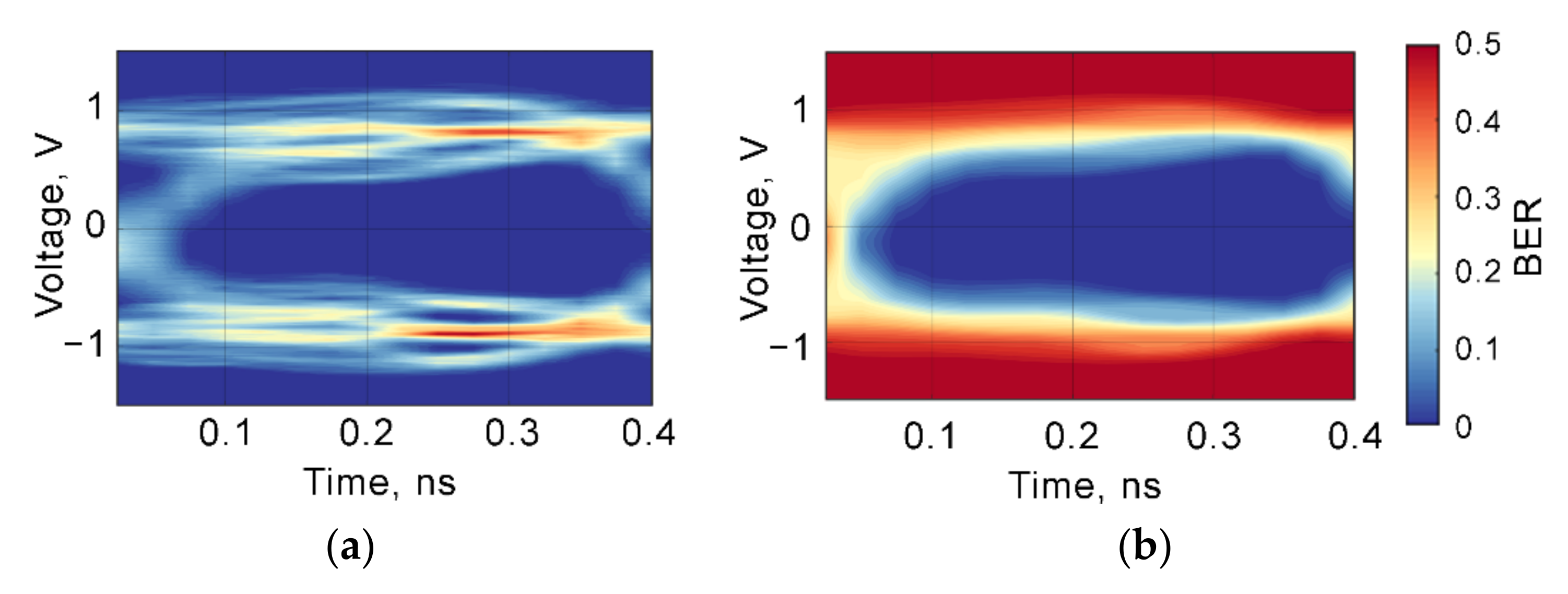
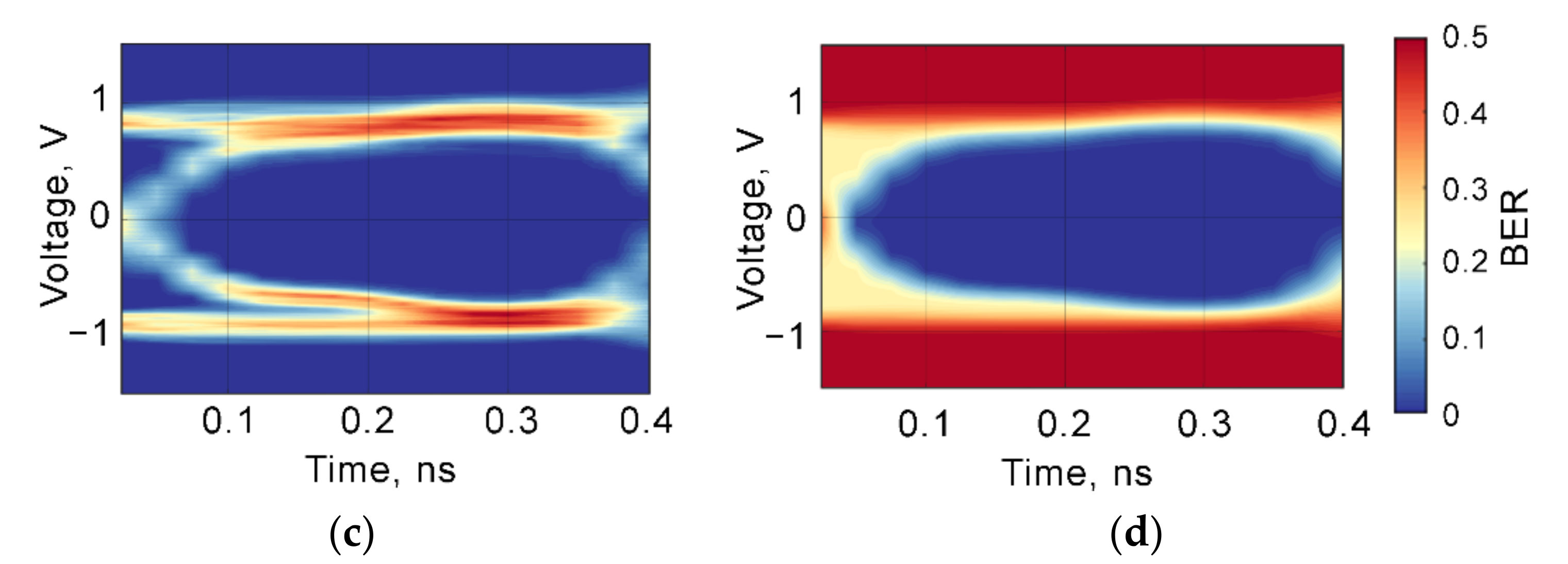
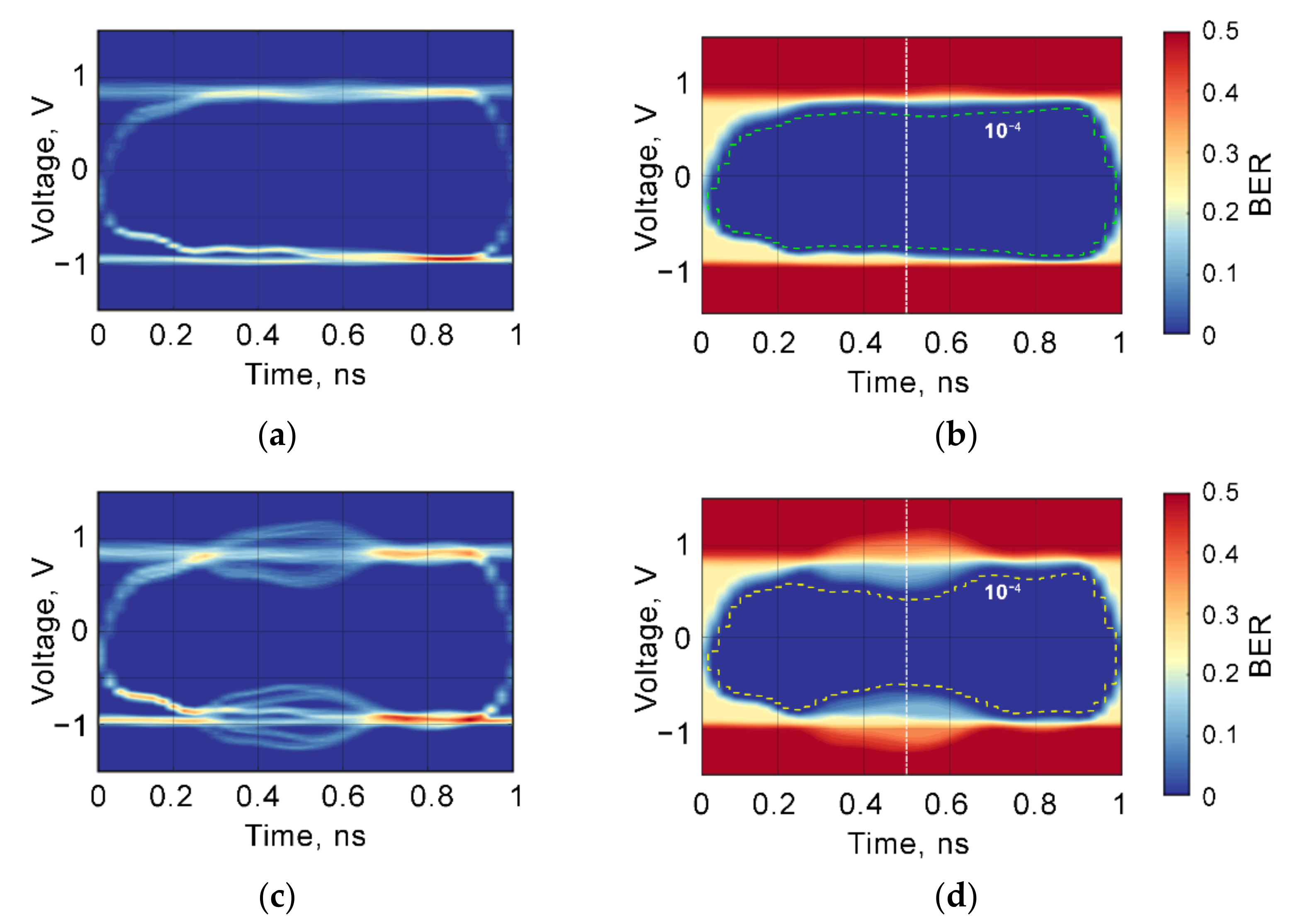
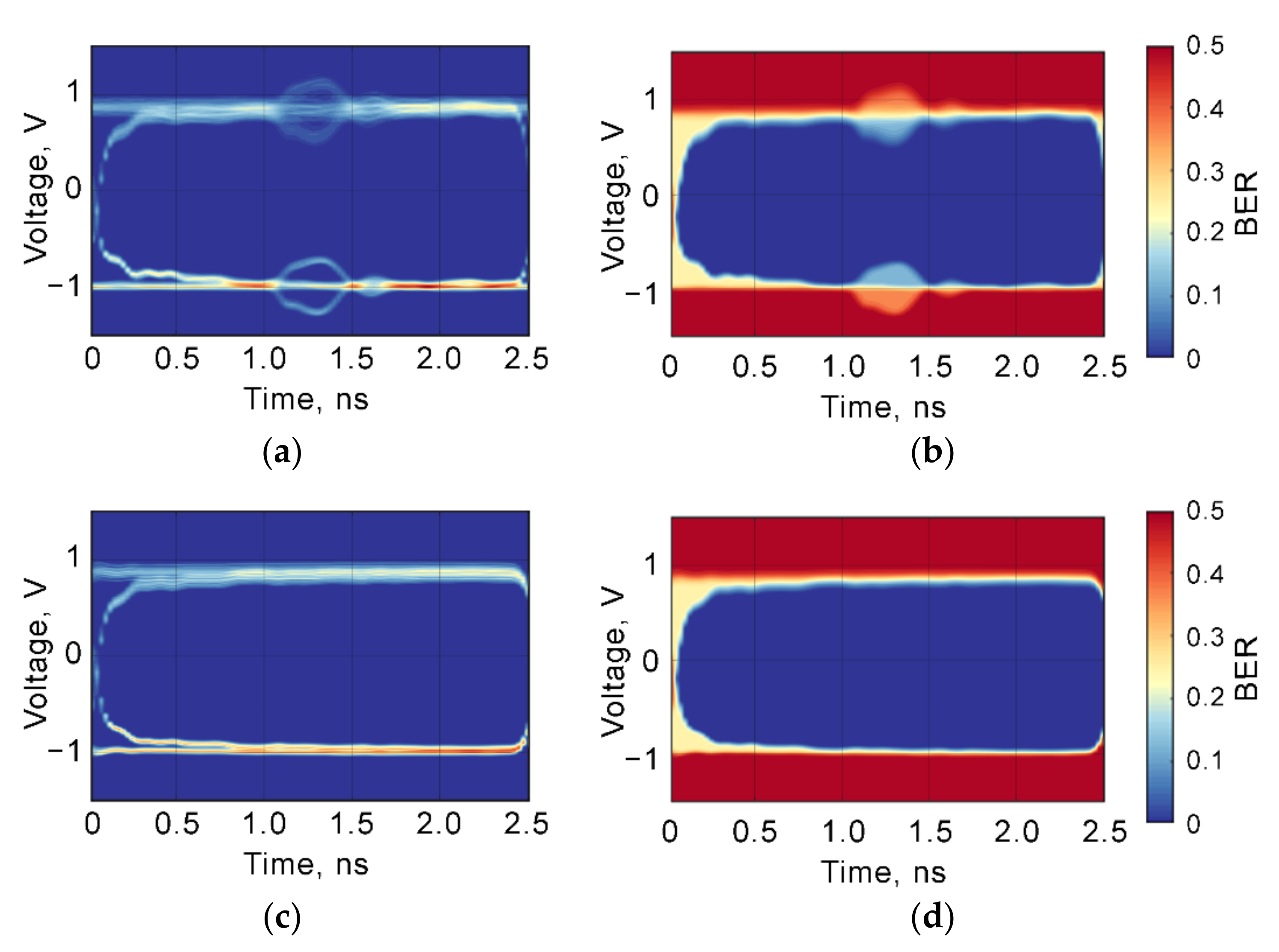
Figure 1 shows an example of the ordinary statistical processing of waveforms with bit rate 1 Gbit/s captured using the digital oscilloscope [
13]. The synchronous ensemble of cyclostationary signals can be represented by eye diagrams.
Figure 1a,c present eye diagrams of measured signals without and with crosstalk interference, respectively, for the possible sampling phase during the unit interval with the duration of 1 ns. The crosstalk degrades the signal waveform decreasing the eye-opening width in the middle of the eye diagram. The corresponding BER plots are shown in
Figure 1b,d. These plots show the quantity of eye-opening width for the given BER level. The green and yellow contours margin the BER level 10
−4 for all sampling phases. The log-scaled BER plot can be viewed using a cross-section for the sampling phase corresponding to the middle of the signal bit response (white dash-dot vertical line).
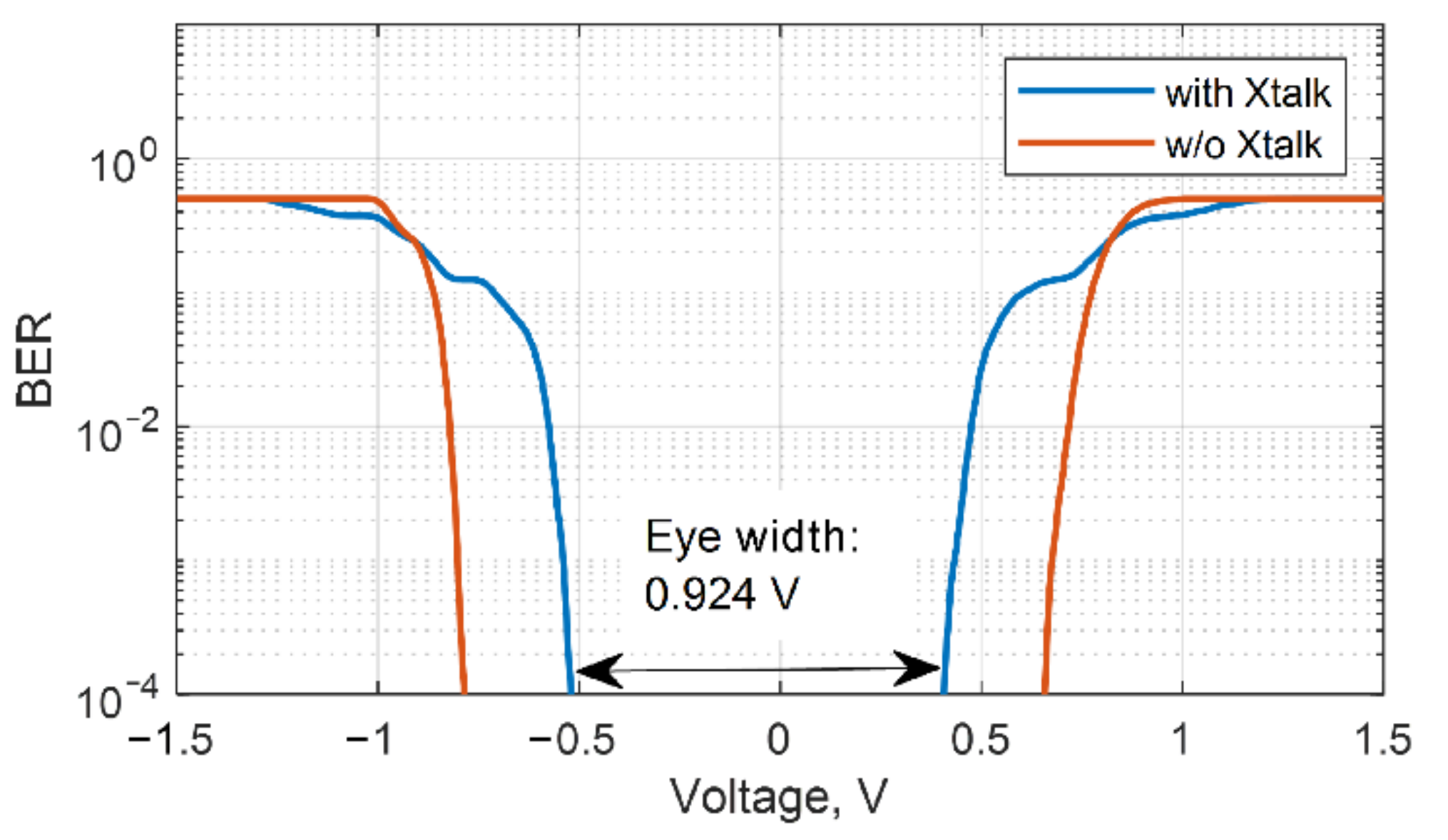
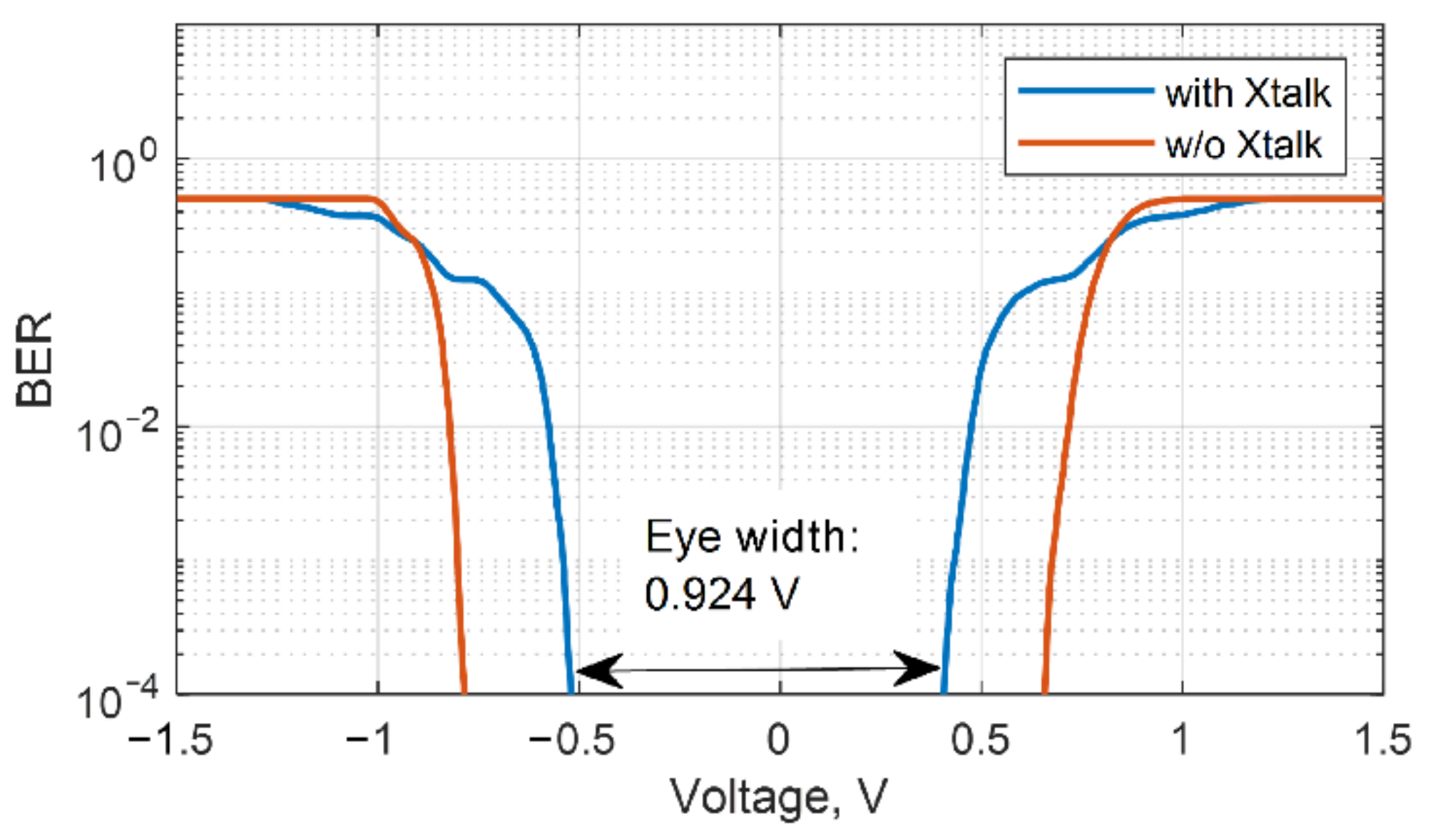
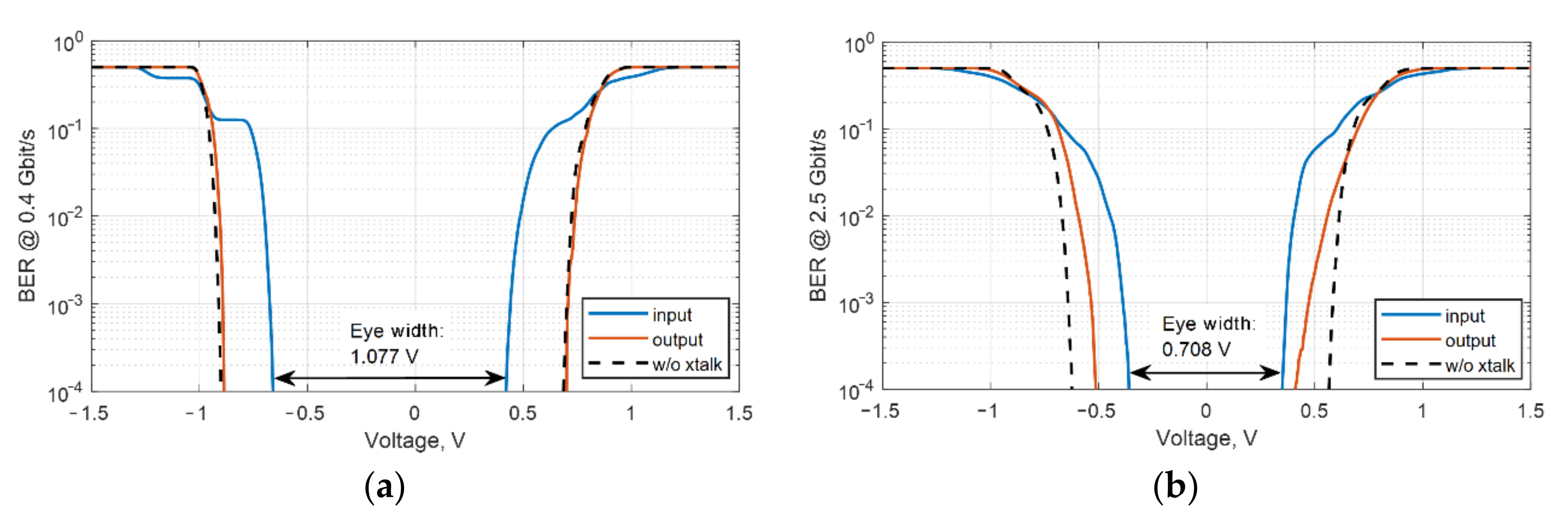
Figure 2 shows the comparison of the BER plots for signals without and with crosstalk interference [
14]. The eye-opening width for the signal with crosstalk is 0.924 V.
The characterization based on the BER for the estimated signals using the minimum mean square error criterion is demonstrative for the performance comparison. In practice the reference level for the chosen figure of merit is provided by signal without crosstalk. The framework of the virtual two channel experiment without and with crosstalk is used for the synthesis and analysis of the signal estimation algorithm.
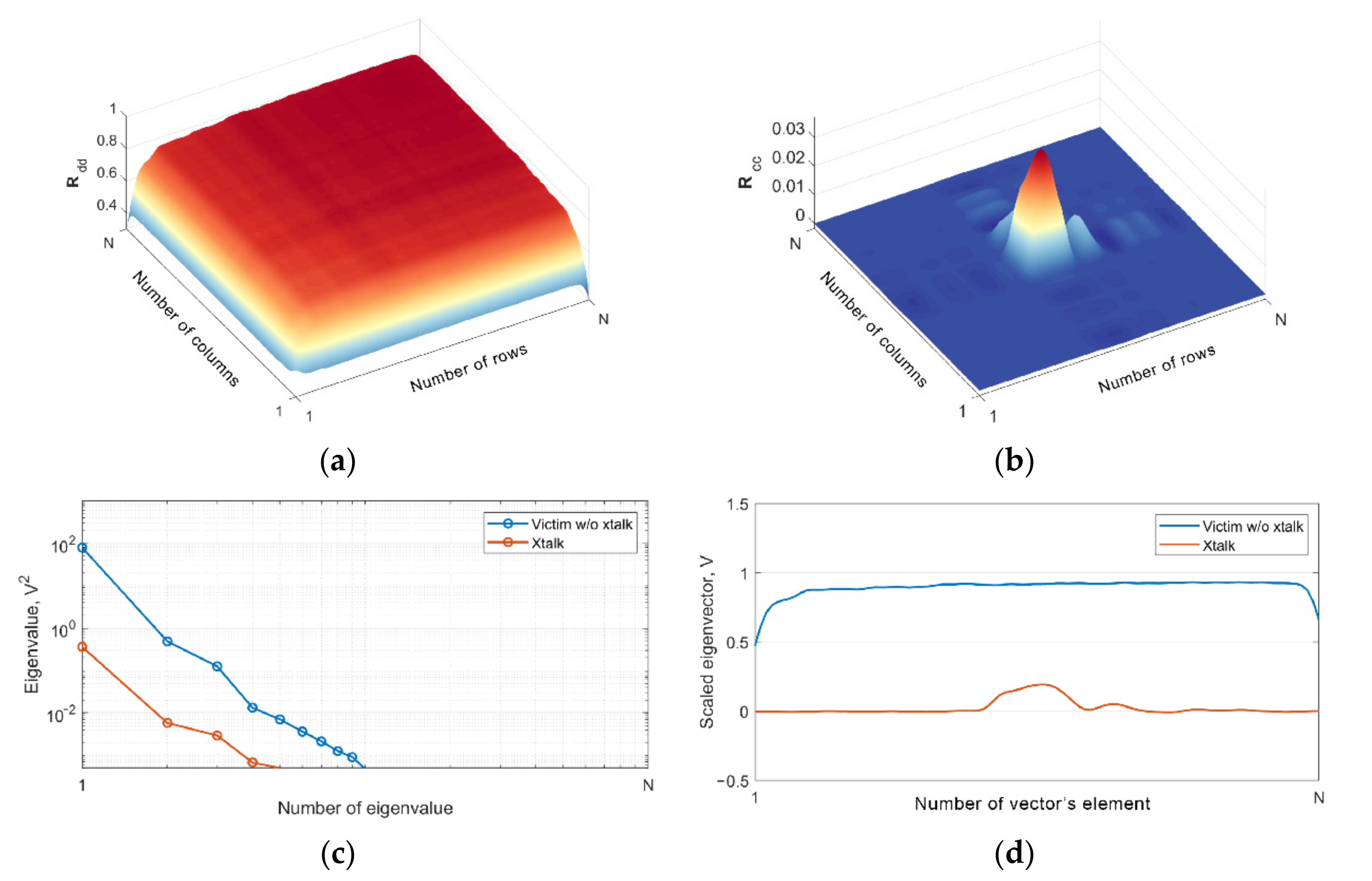
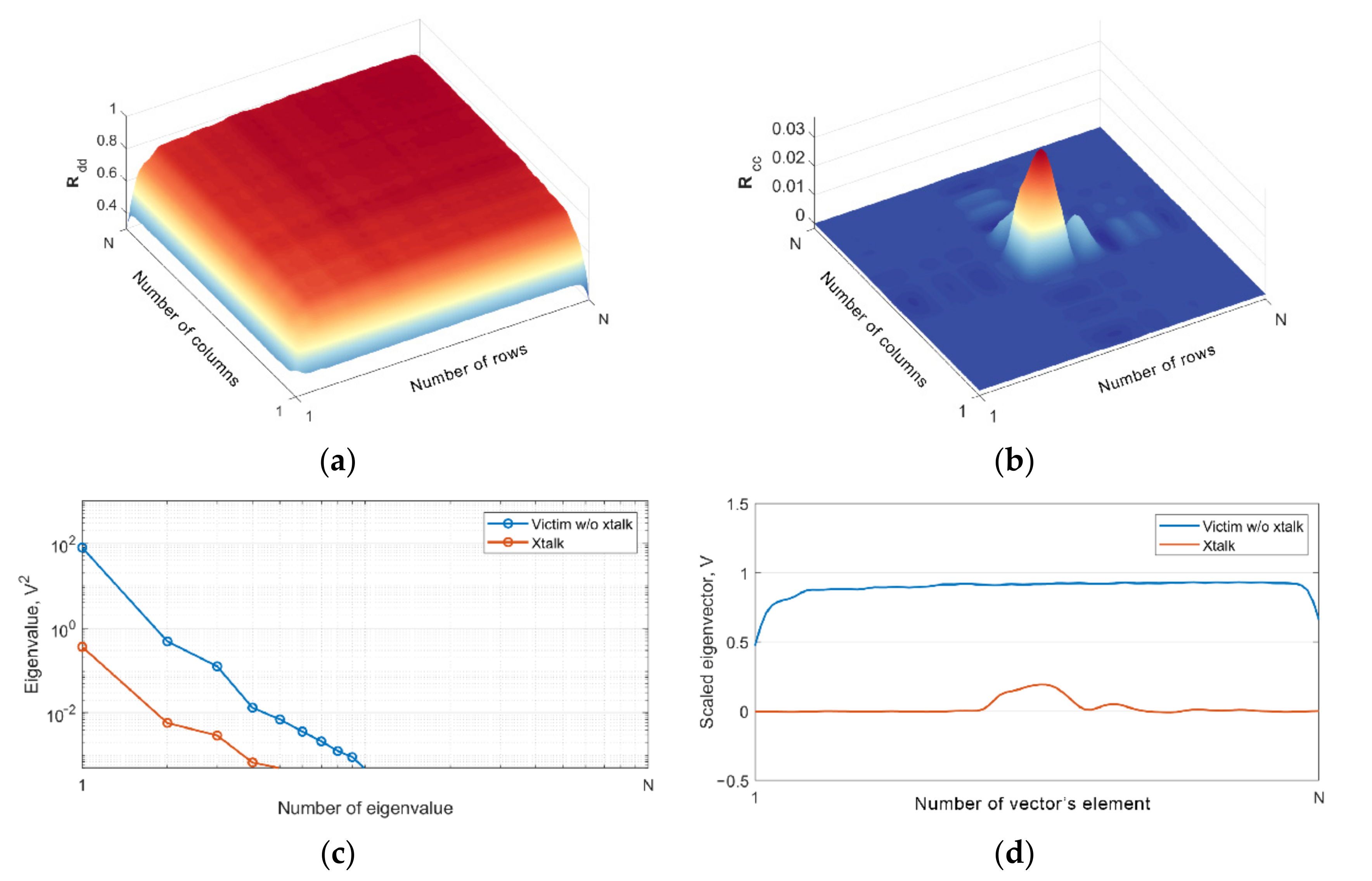
Principal component analysis (PCA) is used to investigate the measured data. The principal components can be computed by performing an eigenvalue decomposition of the data correlation matrix. The crosstalk cancelation can be viewed through the cyclostationary signal minimum MSE estimation. The key factor of the estimation is the evaluated principal components of the victim signal and crosstalk using measured data. The principal components can be expressed as single bit responses [
7,
8] of cyclostationary sources for the unit interval.
The estimation of measured waveforms is performed by using the cyclic Wiener filter. The principle of orthogonality provides an optimum estimator for random cyclostationary signals [
15]. The cyclic Wiener filter is realized as a linear periodic time-varying filter.
The statistical signal processing of measured data can be performed using several techniques. The sliding window filtering of discrete-time signals is equivalent form of the frequency shift filtering (FRESH) [
10,
16]. It can be shown that simple matrix form of sliding window filtering corresponds to the multi-input to multi-output linear time-invariant transforms of the frequency shifted components of the signal.
The serial to parallel transformation of the cyclostationary signals for sliding window filtering can be viewed as forming of a stationary vector. The modern description of synthesis and analysis of signal estimators is presented using a matrix transformation of extended correlation matrices.
The paper is organized as follows. After a short introduction, the fundamentals of linear periodic time-varying filtering theory (LPTV) are provided in
Section 2. The description includes frequency shifting with subsequent linear time invariant filtering (FRESH) and sliding window (SW) filtering implemented by serial to parallel transformation of the measured time series. The equivalence of both approaches is shown, and compact matrix form of the SW filtering is provided. The implementation of the cyclic Wiener filtering algorithm using the LPTV SW approach for the estimation of the input random cyclostationary data sequence corrupted by random cyclostationary crosstalk with the same cyclic period and stationary interference signals are discussed
Section 3. The Wiener solution of the estimation problem is based on the principle of orthogonality, assuming the independence between the random processes constituting the measured data sequence. The independence of crosstalk and the informative cyclostationary processes can be justified by the independence of the information bit sequences in communication lines. The experimental research of the influence of the crosstalk from adjacent transmission line on the quality of the data communication link with and without the proposed Wiener filtering algorithm is investigated in
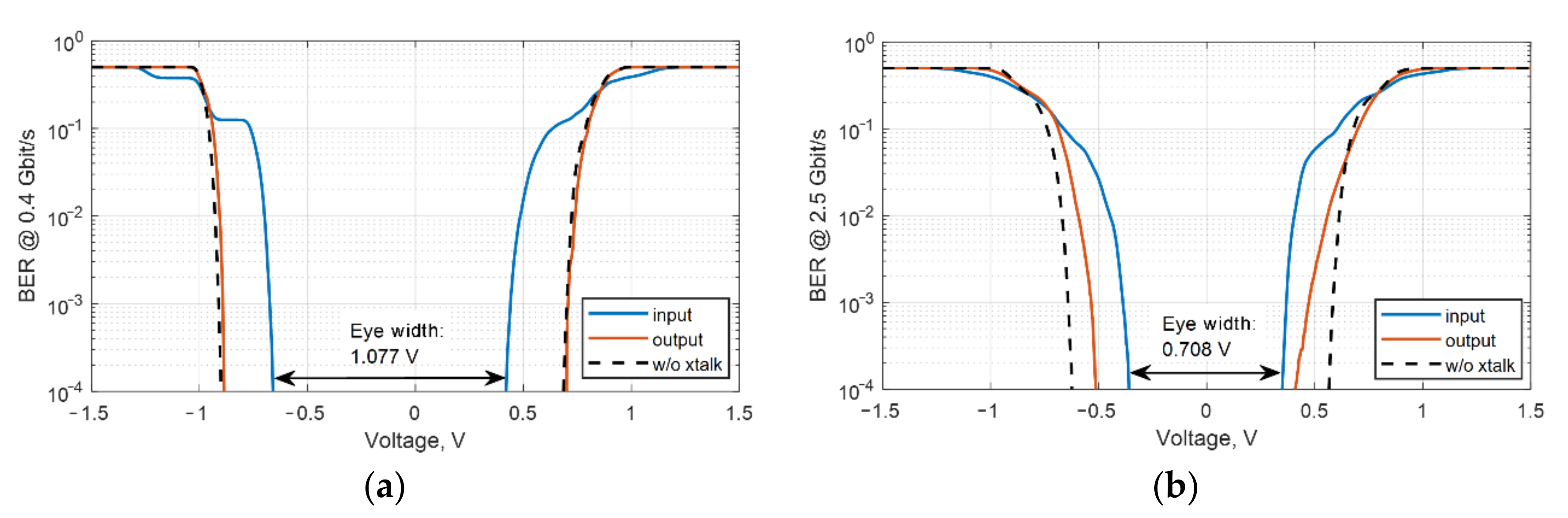
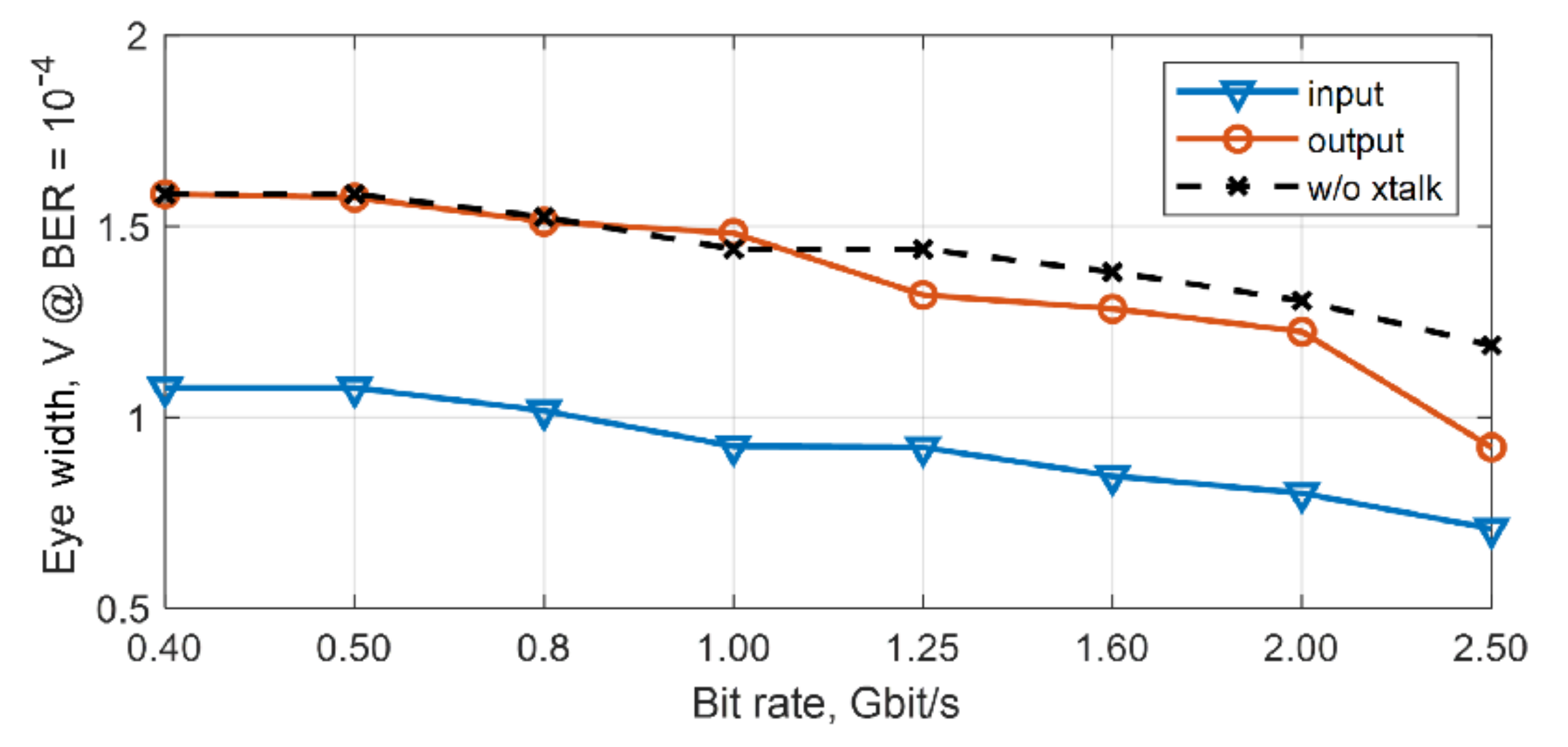
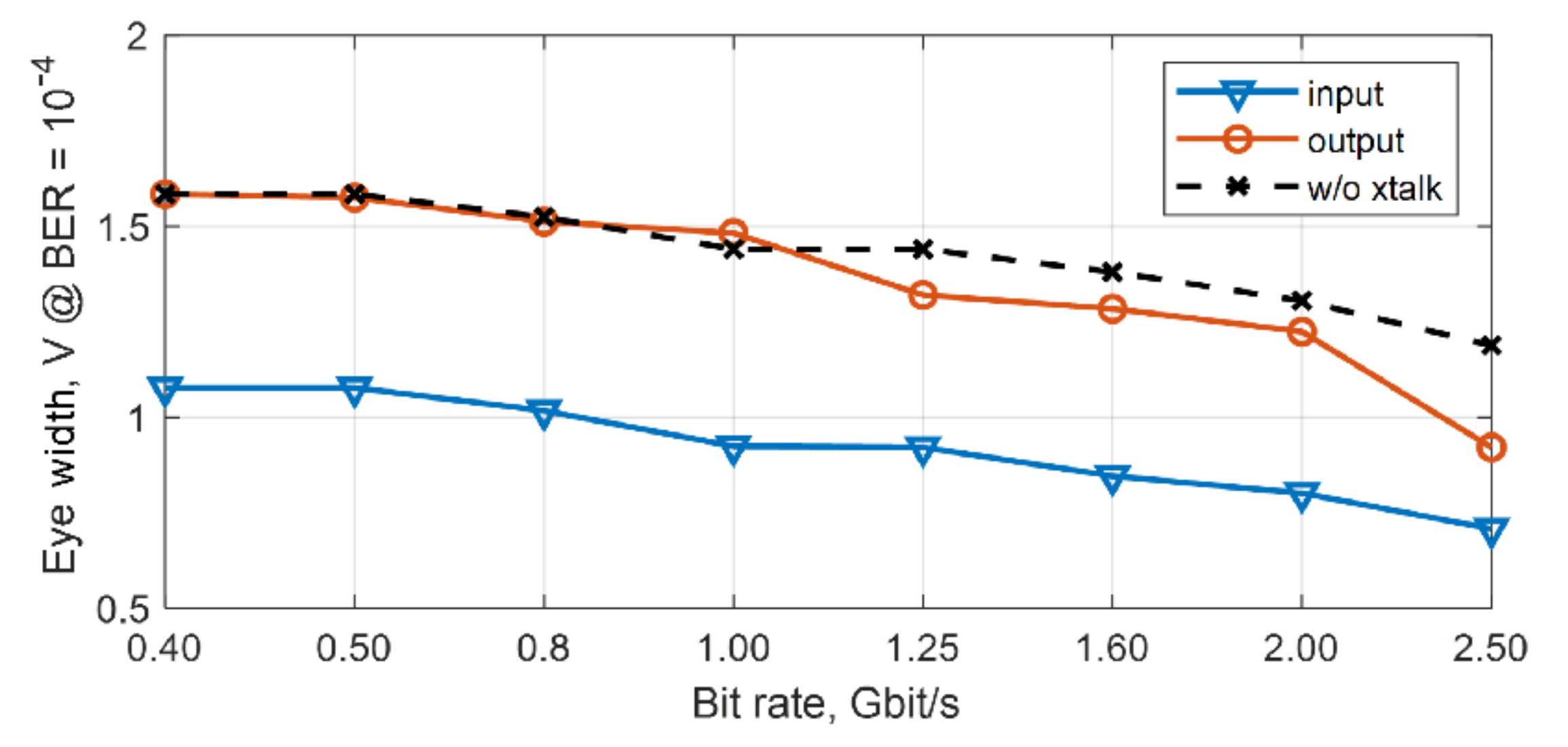
Section 4. The quality of the data transferring is characterized by the BER related to the eye-opening width for bit rates from 0.4 Gbit/s to 2.5 Gbit/s. The paper is concluded by a discussion of obtained results.
2. Linear Periodic Time-Varying Filtering
Linear time-varying (LTV) systems are described by a wider class of signal processing algorithms than linear time invariant (LTI) systems. The filtering, modulation, compensation, equalization, and compression is representing application examples of LTV systems [
16]. The superposition principle of the LTV system is very useful for statistical signal processing. The correlation analysis for LTV filtering of the additive mixture of signals, which contains a desired signal, interferences and noise, can be simplified due to the linear combination of partial output signals.
The LTV system with periodic impulse response (IR) can be used for realization of the efficient cyclostationary signal estimator known as the cyclic Wiener filter [
17] (pp. 240–266). In
Section 2.1, the theory of discrete-time LPTV filtering is introduced. In
Section 2.2, the synthesis and analysis of the cyclic Wiener filter are discussed.
2.1. Frequency Shift Filtering
The output signal of the discrete-time LPTV system can be obtained using the following general expression
where
is an input signal of the LPTV system;
is a periodic two-dimensional IR with period
N.
The LPTV filtering procedure can be described particularly as frequency shifting and subsequent linear time invariant filtering [
16]. The harmonic series representation (HSR) of the signals is used for such description. When
is a cyclic period of the random cyclostationary process, the harmonic series decomposition provides wide sense stationary components. The equivalent LTI multi-input to multi-output (MIMO) transformation of the components is used for filtering of the overlapping in the frequency domain desired signal and interferences with the corresponding bandwidths [
10].
The discrete Fourier transform (DFT) of
L samples of the input signal is defined by
where
.
The frequency shifting of the input signal by
and the following linear time invariant filtering using rectangular frequency response
is expressed in the frequency domain as follow:
where
is a unit step function.
The time domain response is written using inverse DFT:
The initial signal can be written using harmonic series representation that is the summation of the orthogonal components:
where
.
The single component of the output signal can be obtained using the equivalent discrete-time multi-input to single output (MISO) LTI filtering:
where the convolution operation is denoted by symbol ∗. The
th Fourier coefficient of the discrete time two-dimensional function
is given by
where
is periodic along time
and non-periodic along time
. The function
can be obtained by changing variables
and
in the periodic two-dimensional IR
that is the
μth version of the IR
frequency shifted by
:
where
The resulting output of the LPTV system is written as combination of the orthogonal components:
2.2. Sliding Window Filtering
The sliding window filtering is another efficient realization of the LPTV system for overlapped in the time domain desired signal and interferences [
12]. The serial to parallel (s/p) transformation [
10] of the time series can be used for SW filtering. The benefit of s/p representation is provided by the developed matrix mathematics.
The discrete-time LPTV sliding window filtering with length
can be expressed using the simultaneous time shift of both the output and input signals by
and the property of the periodic two-dimensional IR:
The compact matrix form of the expression (14) can be obtained using s/p transformation of signal
to the vector signal
:
where
is
mth unit vector obtained by
permutations of the initial unit vector
;
is a permutation matrix.
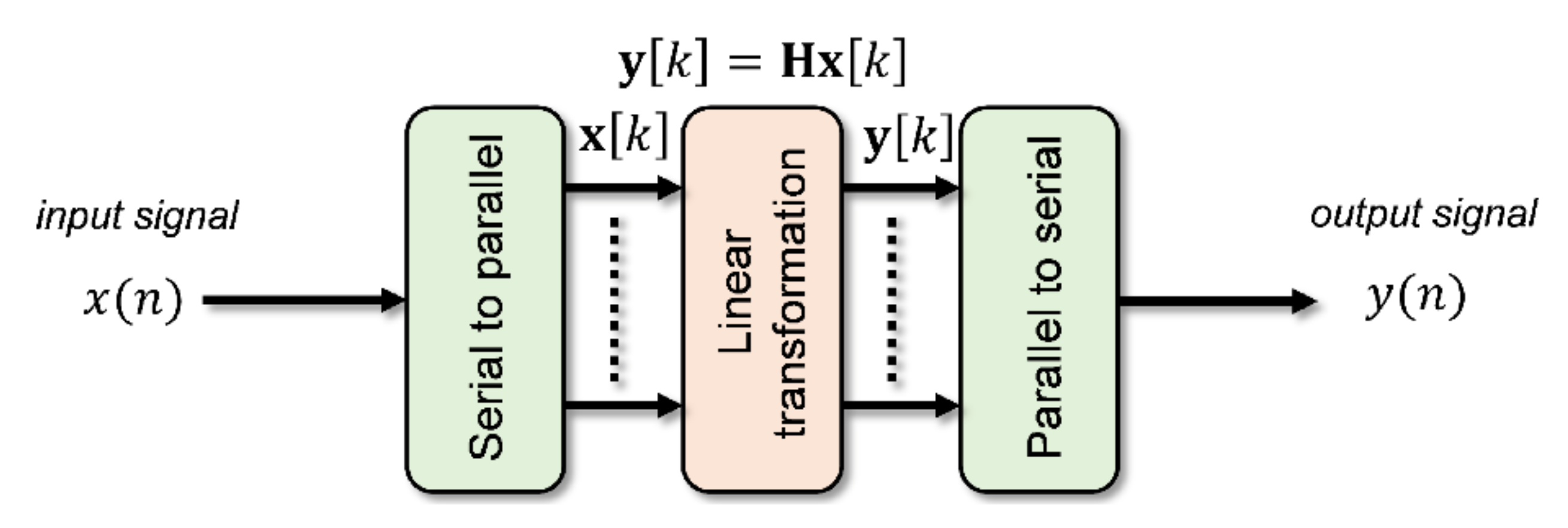
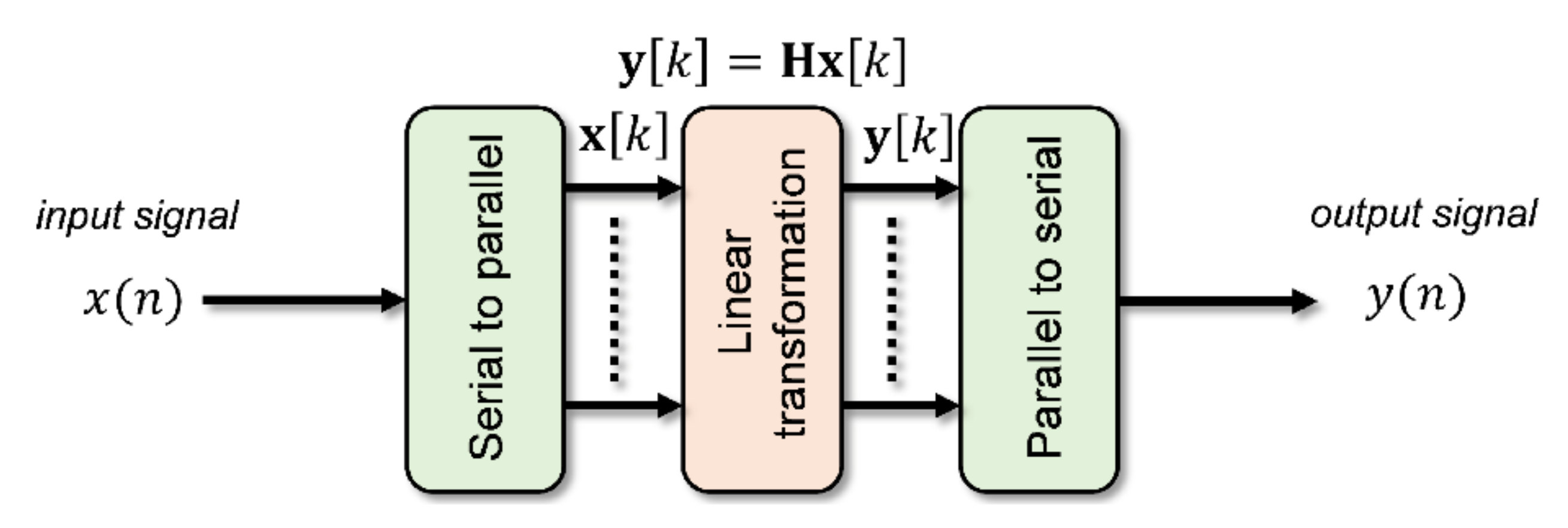
The scheme of SW filtering is shown in
Figure 3. It consists of the s/p transformation of the input signal
, linear transformation (15) of the parallel vector signal
and parallel to serial (p/s) transformation of the parallel vector signal
for obtaining the output serial signal
.
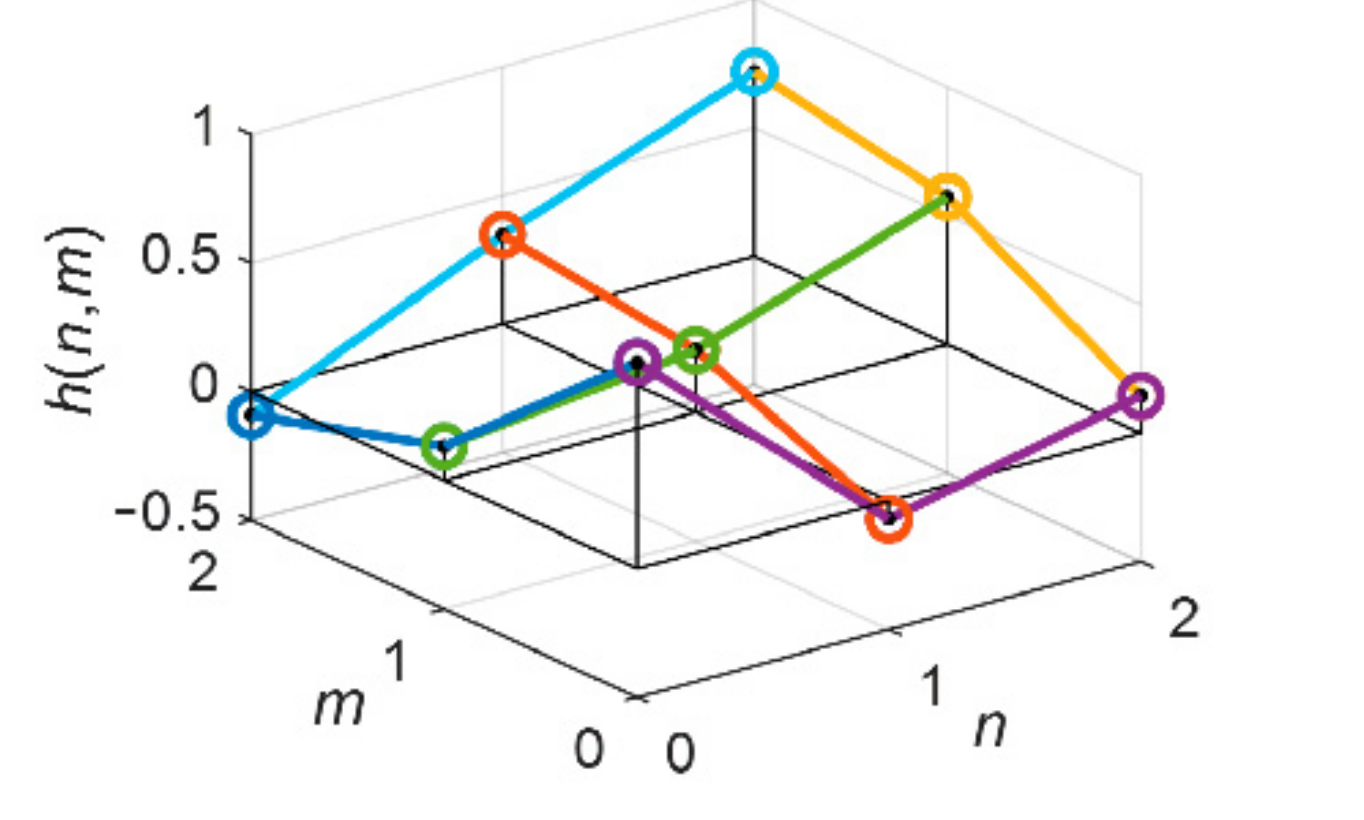
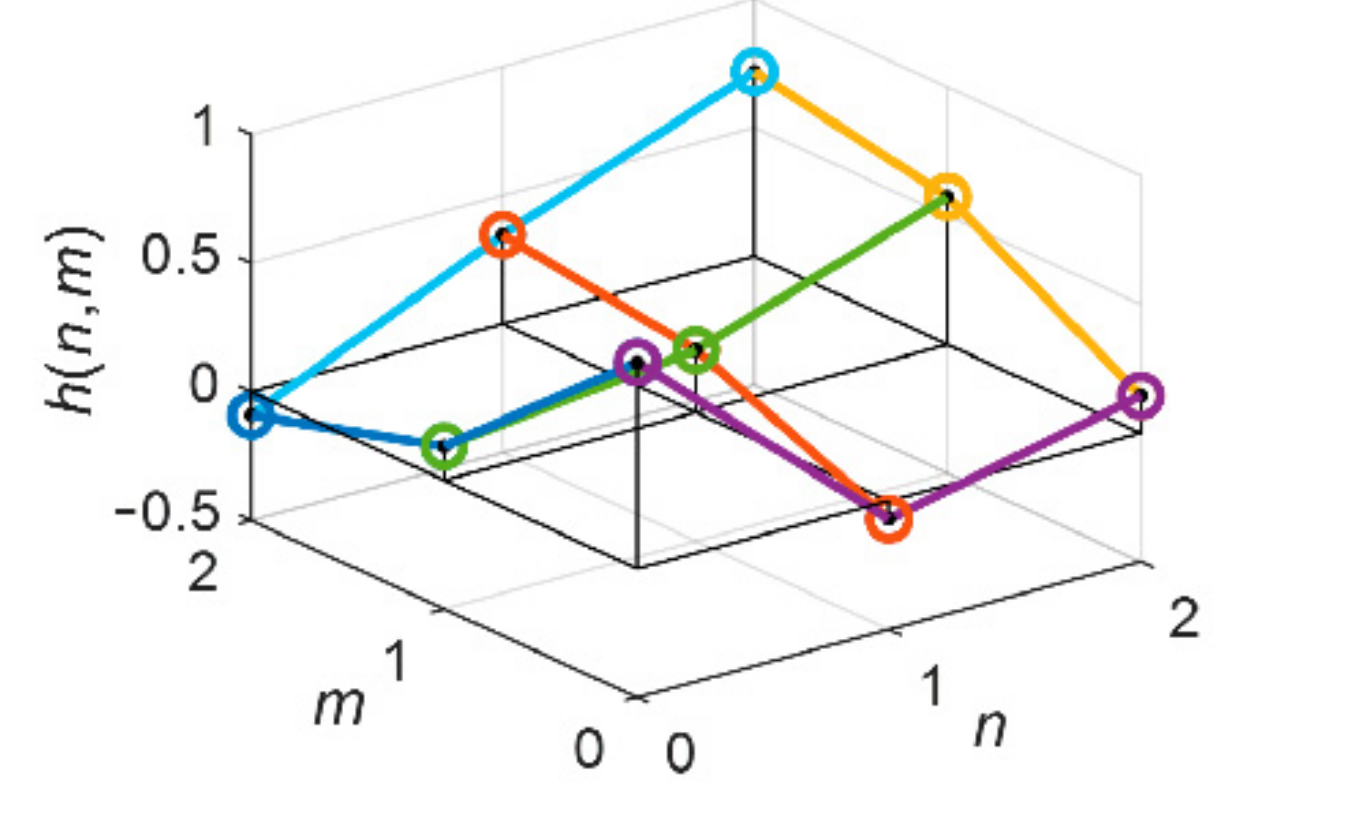
An example of a two-dimensional impulse response
of an SW filter is shown in
Figure 4. The chosen number of samples per cyclic period
.
The relation between the equivalent FRESH and SW type of LPTV filtering can be obtained through s/p transformation for the corresponding HSR components of the input and output signals:
where
The FRESH filtering also has the following compact matrix form:
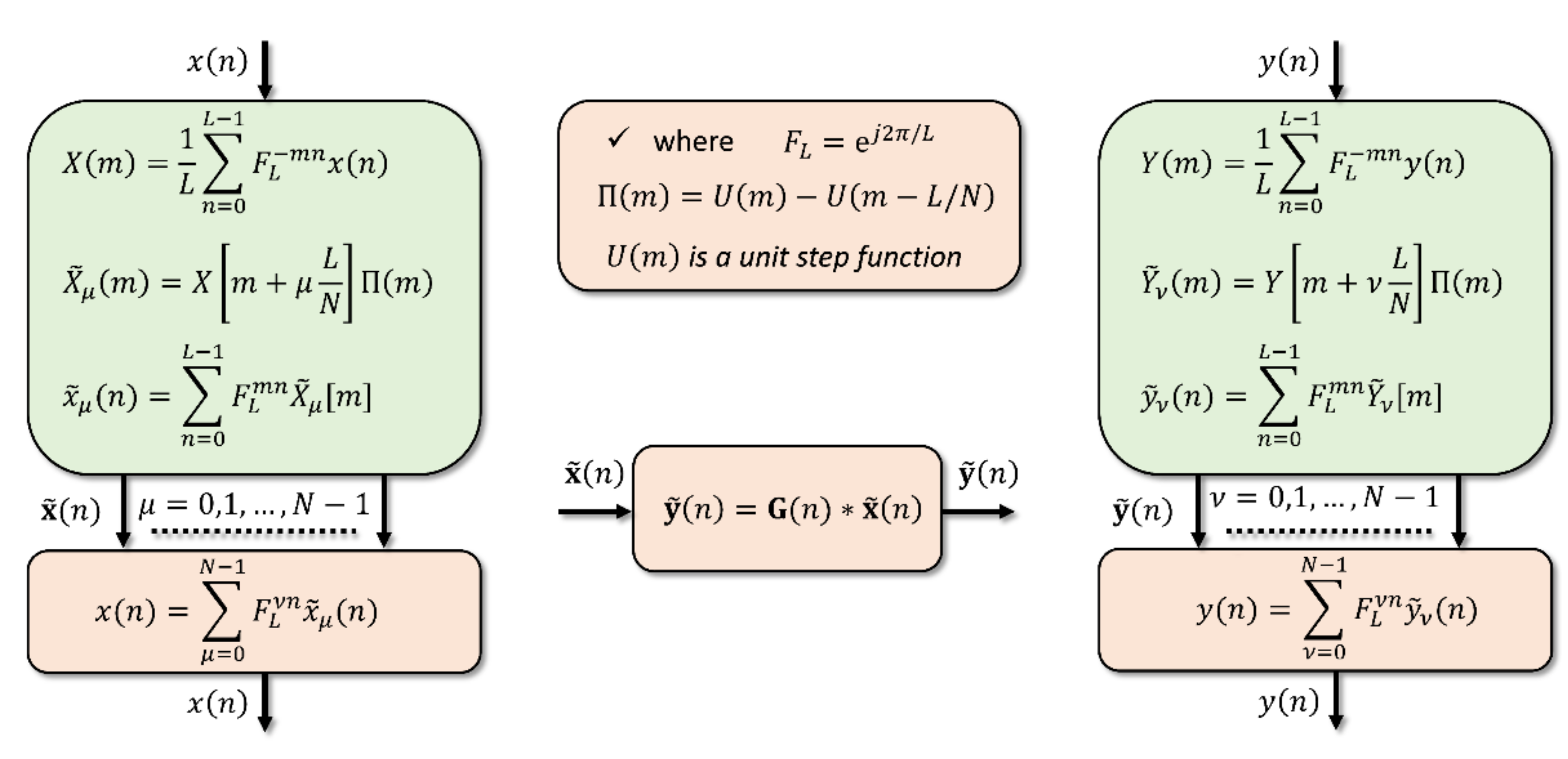
where the convolution operation is denoted by symbol ∗,
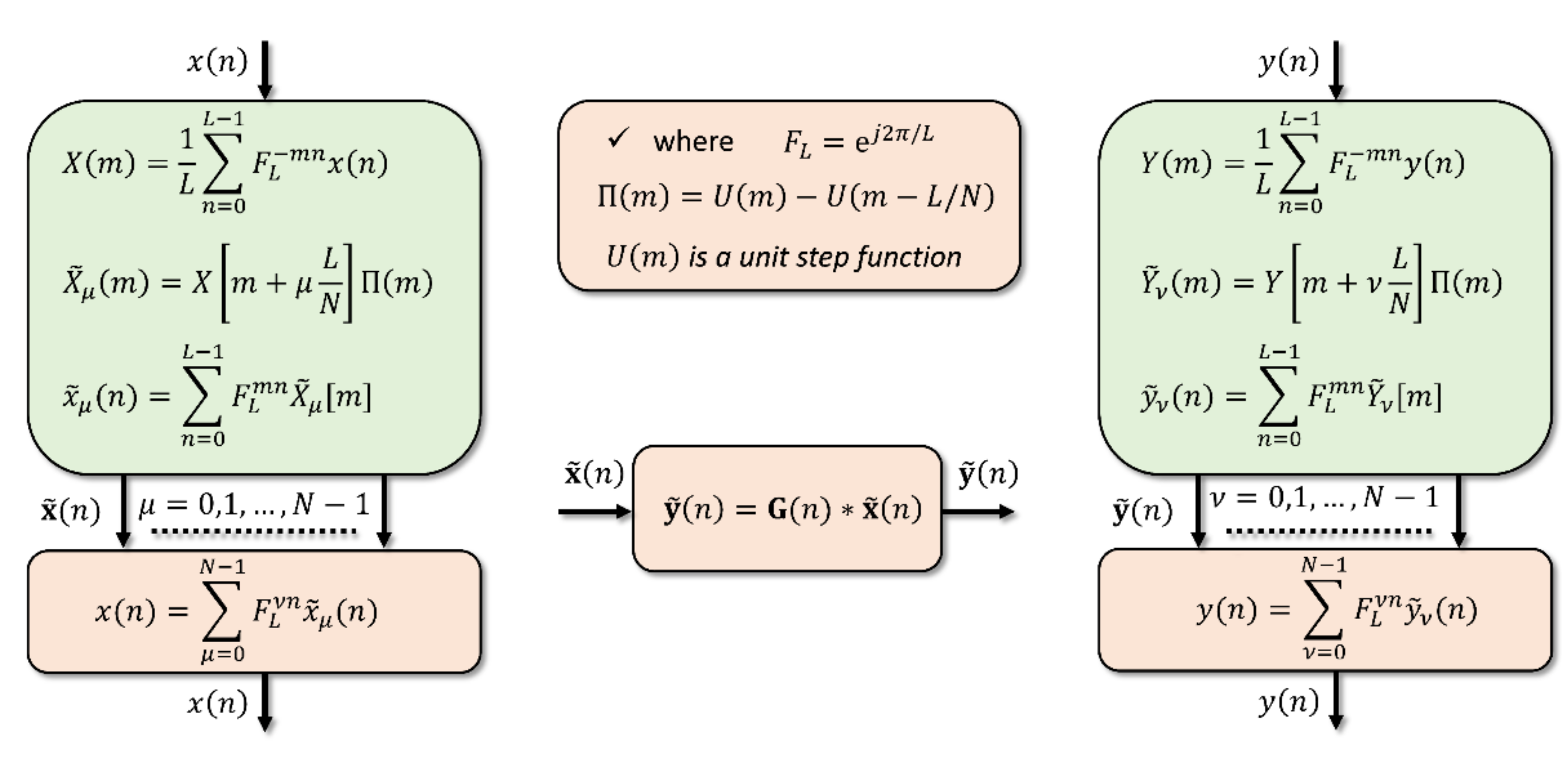
Figure 5 shows the scheme of the frequency shift filtering. The linear transformation has the form of multi-input to multi-output filtering.
The
th Fourier coefficient of the LTI filter impulse response can be expressed using the inner product of the permutated frequency shifted matrix
and matrix
:
where
is a frequency shifted version of the matrix
,
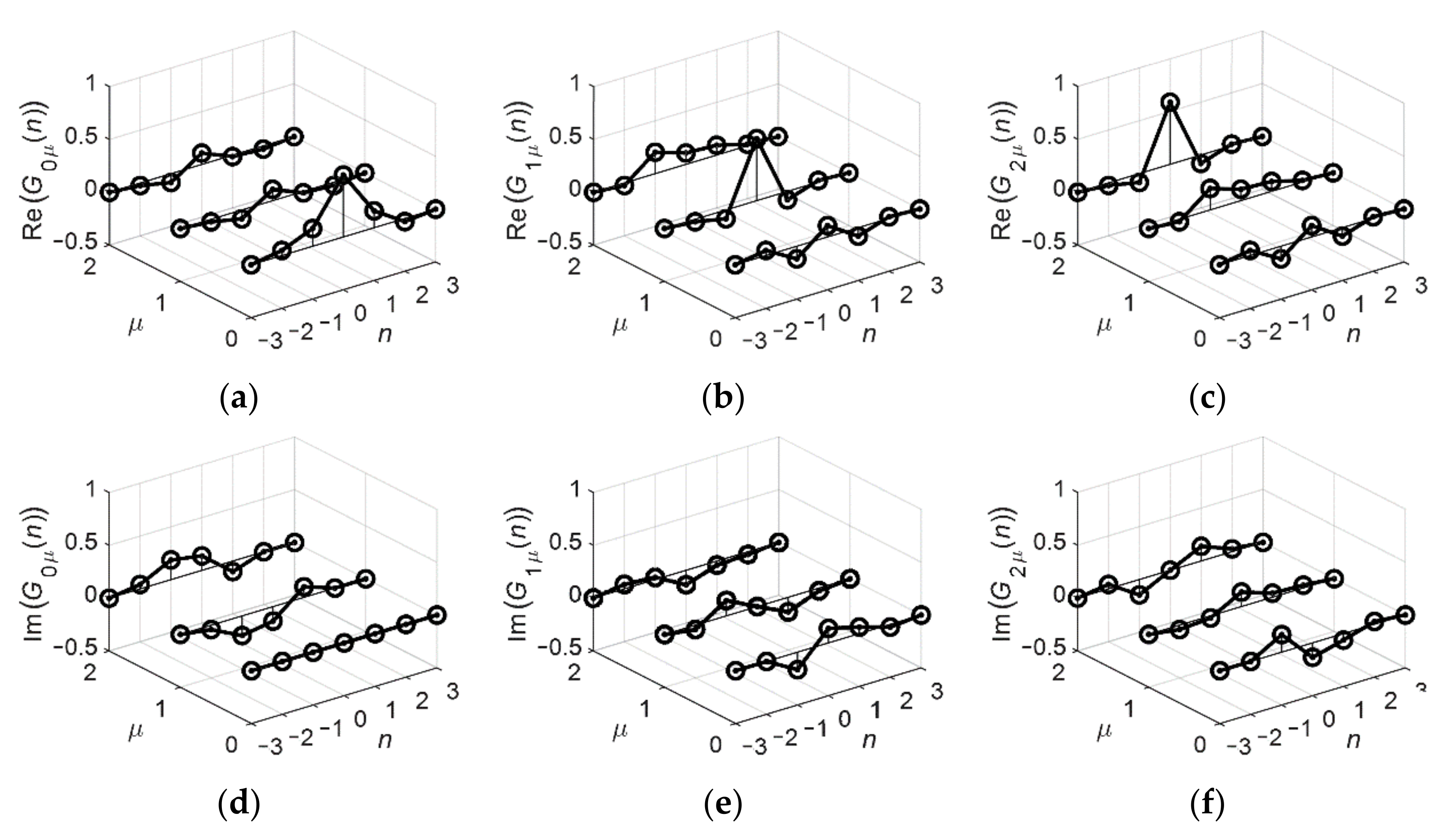
The bank of one-dimensional IRs of the FRESH filter is shown in
Figure 6. This structure is functionally equivalent to the SW filter with a two-dimensional IR shown in
Figure 4. The single one-dimensional IR is complex valued. Real parts are shown in
Figure 6a–c. The corresponding imaginary parts are presented in
Figure 6d–f.
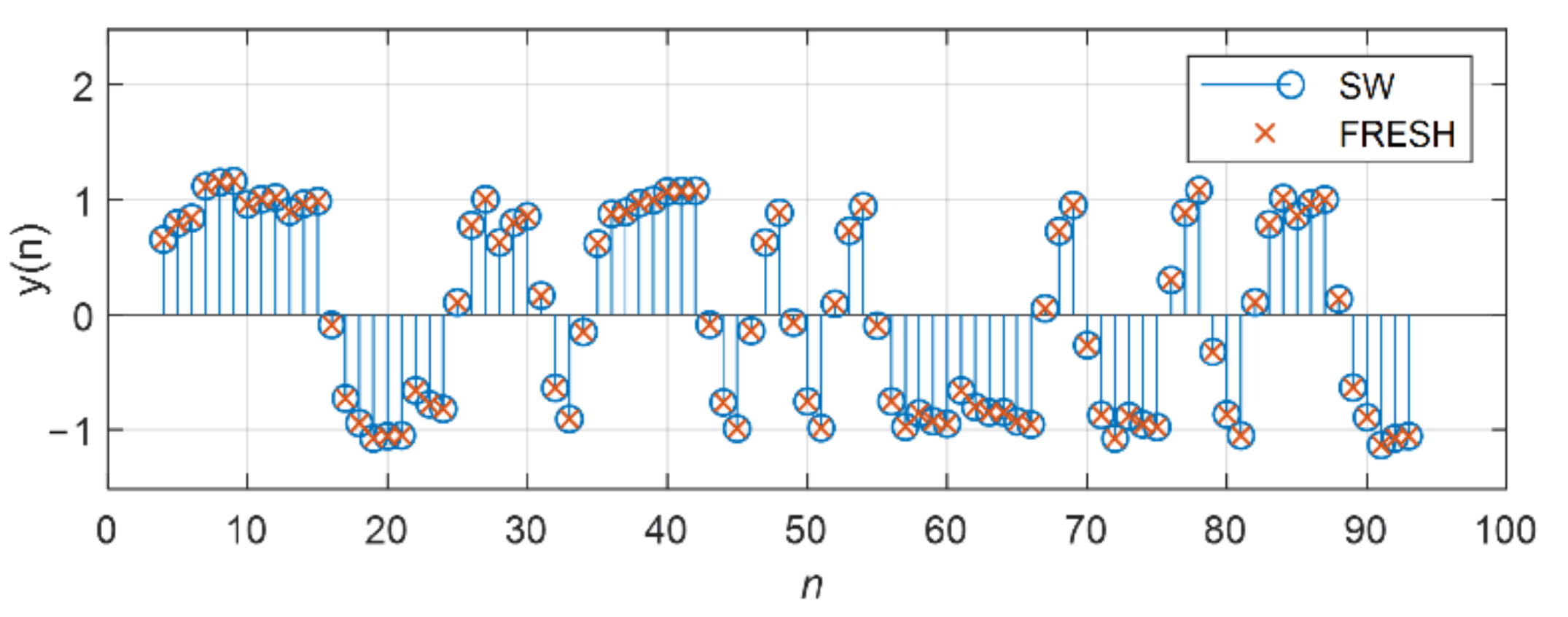
The transformation of signal in the LPTV system can be realized by SW filtering or by equivalent FRESH filtering. An example of the output pulse amplitude modulated (PAM) signal is shown in
Figure 7 for both types of filters.
The analysis of the compact matrix form of the SW LPTV filtering using HSR shows that its FRESH representation includes frequency shifts and MIMO LTI filtering of band-limited components of the input signal. The output full-band signal is obtained by combining the orthogonal components.
3. Synthesis and Analysis of Cyclic Wiener Filter
The signal estimation problem can be viewed through the SW filtering of the measured signals rearranged using serial to parallel transformation. This estimator is referred as a Wiener filter. The equality of the period of the corresponding LPTV filter and cyclic period of the corresponding random cyclostationary processes makes the estimator a cyclic Wiener filter.
The matrix notation used for the SW filtering of cyclostationary signals simplifies the description dealing with the stationary vectors. The desired signal is transformed into a real-valued vector
. The measured signal denoted by the vector
with the same length is linear transformed using a real-valued weighting matrix
. The difference between estimated and desired signals is an estimation error
. Two equations can be used for the introduction of the signal estimation problem, avoiding denotation of the filter output signal:
The obtained dual equations can be mapped into the composite form using the virtual two channel estimation problem.
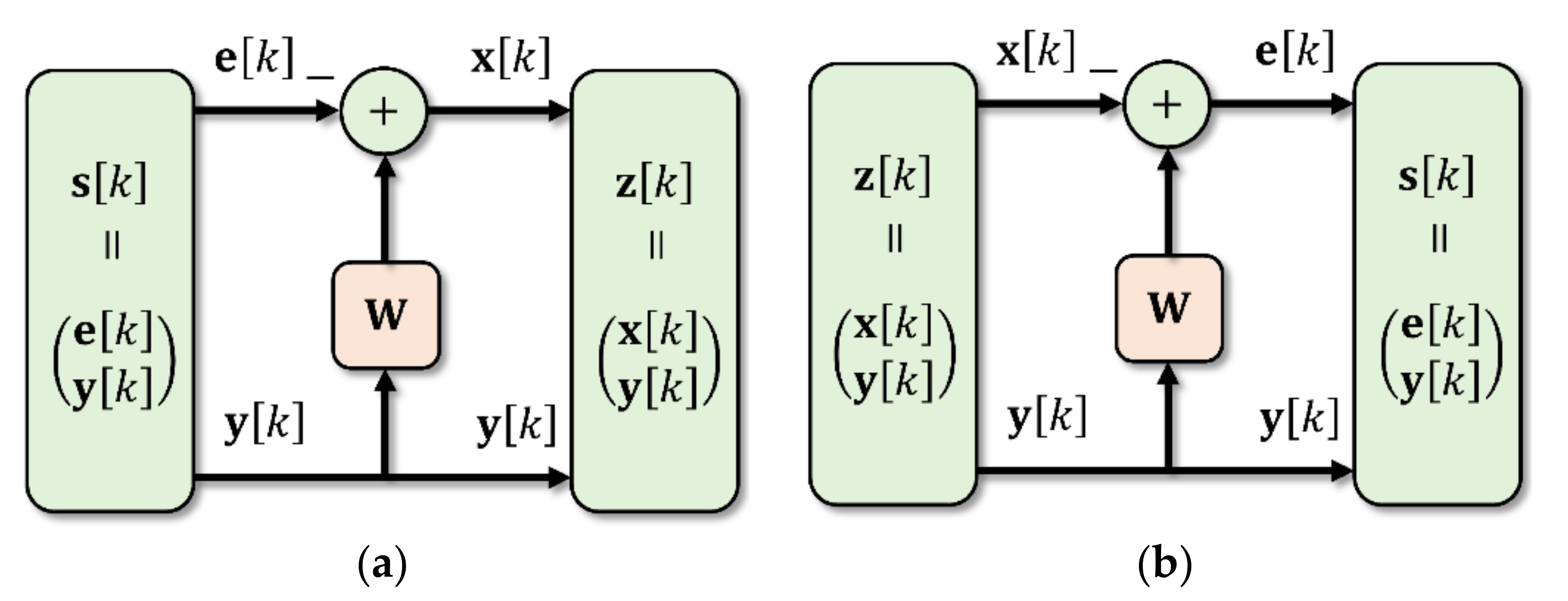
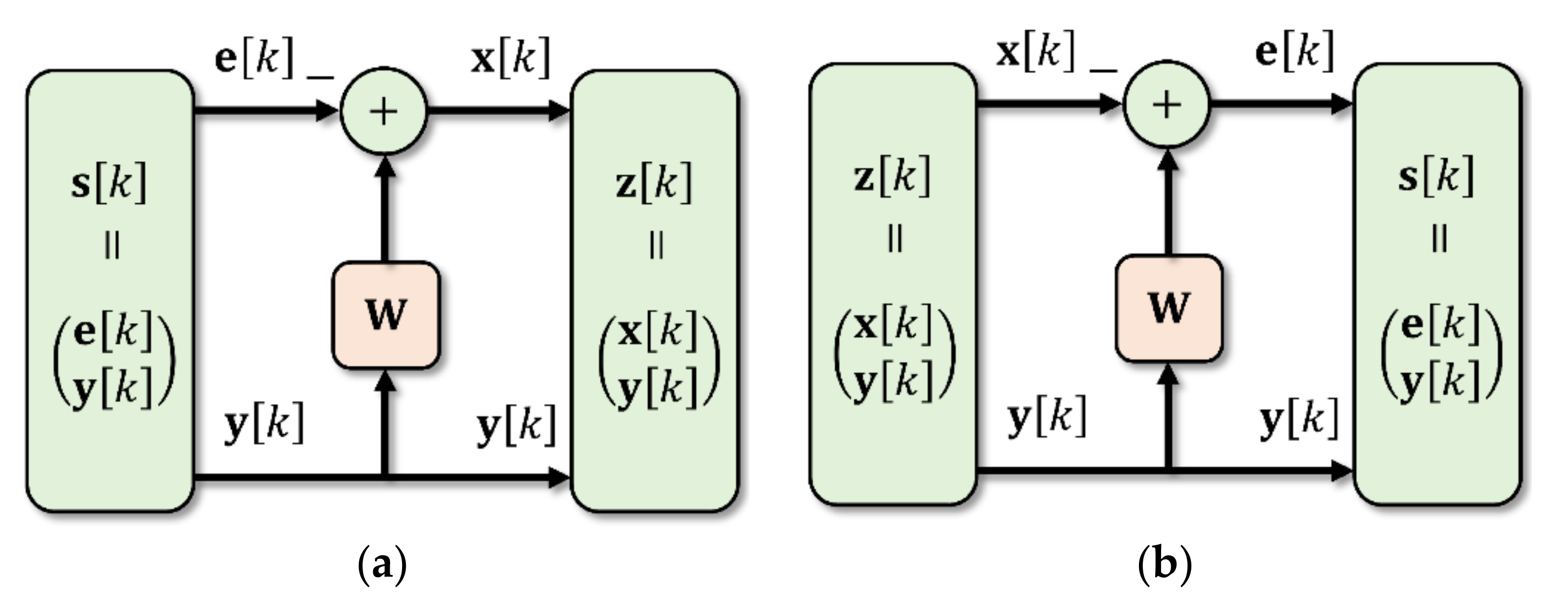
Figure 8 shows the pair of two-channel systems where input and output vectors are composite block vectors. The block vector
is obtained as a composition of vectors
and
. The block vector
consists of vectors
and
. The scheme in
Figure 8a is used for synthesis, and the scheme in
Figure 8b is used for an analysis problem. The mentioned schemes are identical if permuting input and output block vectors. The motivation of this step is an application of the partitioned correlation matrices for input and output composite vectors. These matrices contain all the necessary correlations between vectors for solving estimation problems.
The input to output relations for the corresponding synthesis and analysis schemes shown in
Figure 8 can be written using partitioned matrix
for the definition of linear transformation of composite vectors
and
in accordance with (26) as follows:
where
is an identity matrix.
The correlation matrix of the block vector
is a partitioned block matrix:
where
is an expectation operator,
and
are the correlation matrices;
and
are the cross-correlation matrices.
The Wiener solution of the estimation problem is based on the principle of orthogonality. The error
and the measurement
are the uncorrelated random signals so that:
The correlation matrix of composite vector
is analyzed in the same manner as the correlation matrix
and has a block diagonal form due to the orthogonality of the error and measured signal:
where
is an error covariance matrix.
The linear transformation of the random composite vectors
and
for synthesis and analysis schemes can be viewed through the transformation of corresponding correlation matrices using matrix
:
The upper triangular matrix
and block diagonal matrix
corresponding to the Cholesky decomposition of partitioned correlation matrix
can be used for matrix factorization:
where
is the Schur complement of
in
.
The comparison the blocks
in (33) and
in (32) gives the equation for the cyclic Wiener filter:
The error covariance matrix
can be found by comparing correlation matrix
in (32) and block diagonal matrix
in (33):
In summary of this section, the virtual two channel experiments can be discussed. The analysis problem corresponds to the linear transformation of composite vector .
This model produces an error that is orthogonal to the measurement provided by the appropriate Wiener filter. The synthesis problem can be modeled using the same linear transformation of the composite vector with a given block diagonal correlation matrix that returns the vector . The decomposition of the correlation matrix of vector provides the block Cholesky factors corresponding to the transformed correlation matrix of vector .
The crosstalk interference canceler is a specific cyclic Wiener filter. The main contribution to the disturbance of the signal is generated by cyclostationary crosstalk in the presence of low stationary noise compared with the desired signal. The characteristics of the synthesized and analyzed cyclic Wiener filters for crosstalk cancelation is presented in
Section 4.
5. Conclusions
The current study focuses on the realization of the parallel high-speed data transferring busses can encounter and induce unintentional emission of crosstalk signals. The assurance of signal integrity in such data transmission links can be achieved by the crosstalk cancelation using a transceiver utilizes the cyclostationary properties of crosstalk. The model of the victim signal consists of the valuable data signal corrupted by the additive of the cyclostationary aggressor signal and stationary noise. The independence of the crosstalk and informative cyclostationary processes is justified by the independence of the information bit sequences in communication lines of the aggressor and the victim. In this case, the filtering of the observed measured random process can be implemented by the cyclic Wiener filter, estimating the message in the measured signal.
Filtering of the random process with periodical correlation properties needs to be implemented by the linear system with a periodically changing impulse response. It is shown that the output of an LPTV structure may be expressed as a sum of the filtered versions of frequency shifted copies of the input cyclostationary random process. The equivalent time-domain sliding window transformation of the cyclostationary random process assumes the serial to parallel transformation of the input signal, multi-input to multi-output linear filtering of this vector process, and the parallel to serial transformation providing the filtered cyclostationary output signal.
The experimental results obtained by cyclic averaging of the measured random processes before and after the cyclic Wiener filtering showed significant reduction in the crosstalk interference components in the estimated message signal. The evaluated eye diagrams provide the estimation of the bit error rate which quantitatively characterizes the transmission of data after the implemented filtering of the aggressor’s interference. The investigated dependence of the eye-opening width versus bit rate of the data transferring showed the reduction in the eye width caused by a decrease in the signal to interference ratio of the measured signal.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}