
Installation of Clip-Type Bird Flight Diverters on High-Voltage Power Lines with Aerial Manipulation Robot: Prototype and Testbed Experimentation

 , , and
, , and
Abstract
:1. Introduction
- −
- Design and manufacturing of a novel prototype for the installation of a kind of clip-type bird flight diverter;
- −
- Development of a semi-autonomous method for bird diverter installation on overhead power line cables using an unmanned aerial robot;
- −
- Experimental validation of the prototype in an indoor testbed, closing the control loop with a vision-based Opti-Track system;
- −
- Experimental validation and performance evaluation of the complete installation task.
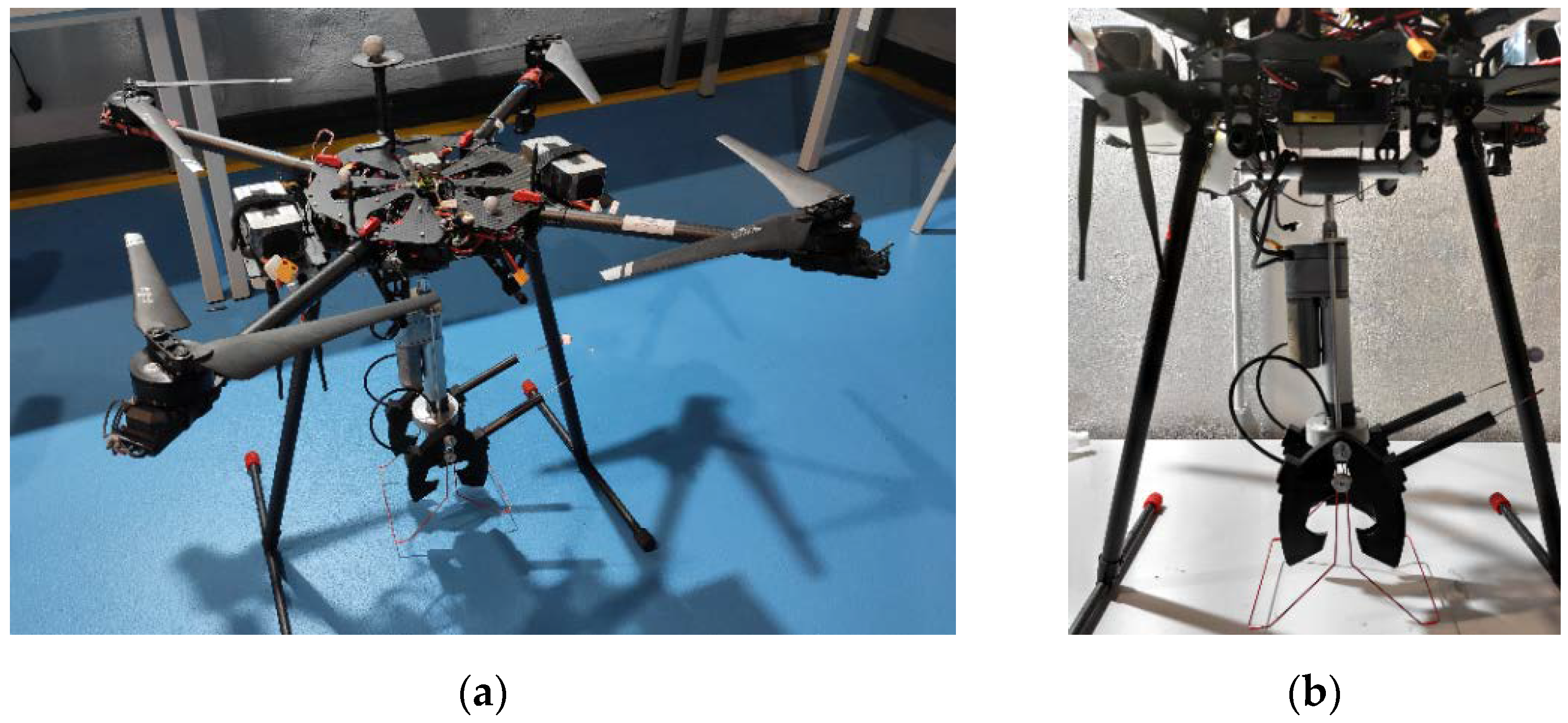
2. Aerial Robot Design and Development
2.1. Aerial Platform
- −
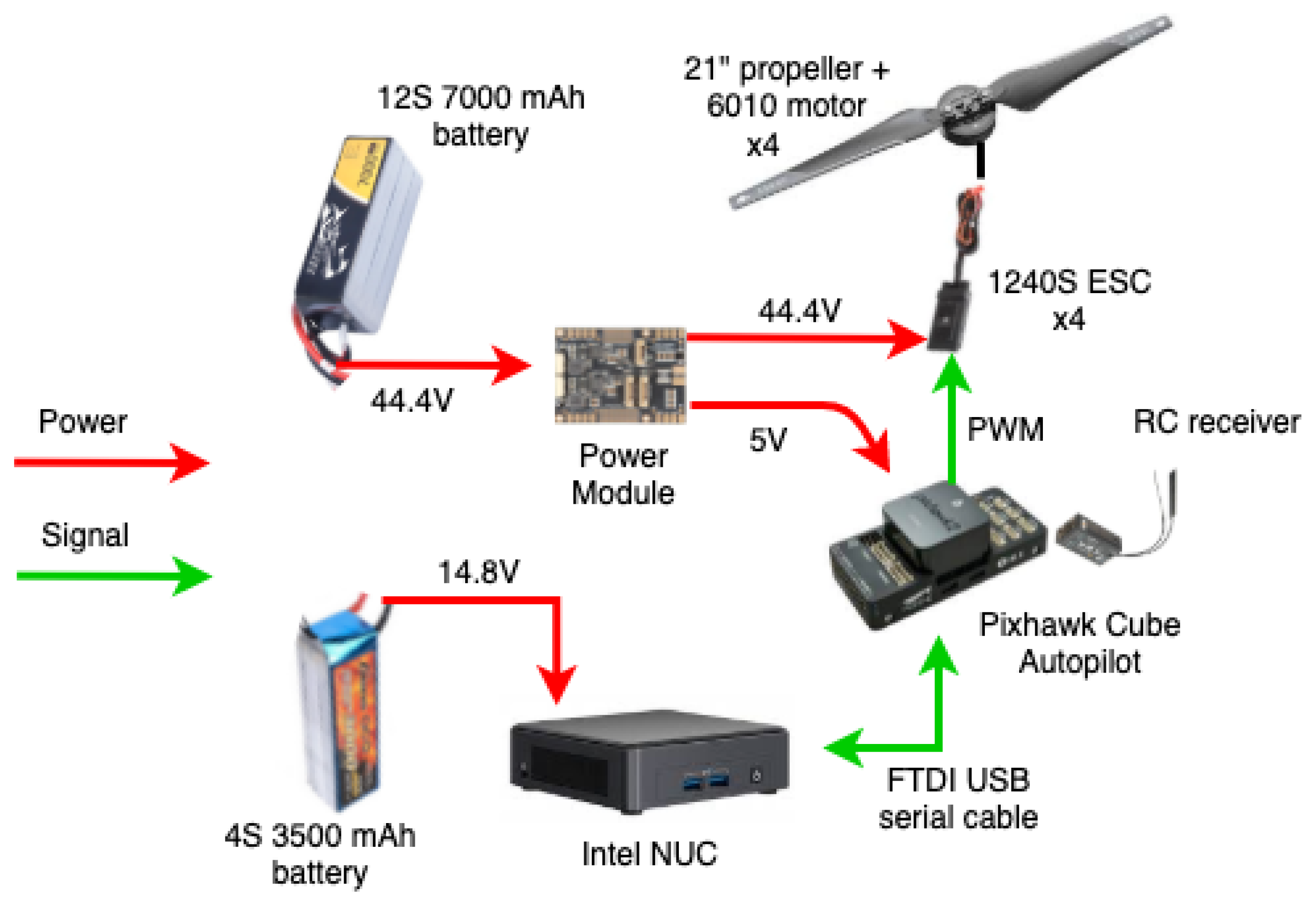
- Propellers: four ultra-carbon fiber -inch radius propellers are used to generate enough thrust and load capacity in a plus “+” shape configuration.
- −
- Motors: brushless direct-current (BLDC) motors, , with (), have been used, where is the motor velocity constant. They provide maximum pulling force per rotor, with a maximum of power. It has a cooling air circulation system, convenient for long-term operation. The weight of each motor is . The suggested battery is . Thus, the no-load speed by batteries is .
- −
- Drivers: a electronic speed controller is used as the driver of the BLDC motors. It is waterproof and has silica thermal pads and heat sinks for maximum heat transfer and dissipation. It works with a maximum of and up to continuous current and peak.
- −
- Main processor: an Intel NUC-i7, with 16 GB RAM, plays the role of the main processor of the UAV. It has USB 3.0, Ethernet, HDMI, Mini PCI Express ports, and low consumption that allows it to work with a power supply.
- −
- − Autopilot: the UAV uses PIXHAWK Cube 2.1 autopilot. It has a 32-bit STM32F427 Cortex-M4F core with FPU, 168 MHz/252 MIPS, 256 KB RAM, 2 MB Flash (fully accessible), 32-bit STM32F103 failsafe co-processor, and 14 PWM/Servo outputs (8 with failsafe and manual override, 6 auxiliaries, high-power compatible).
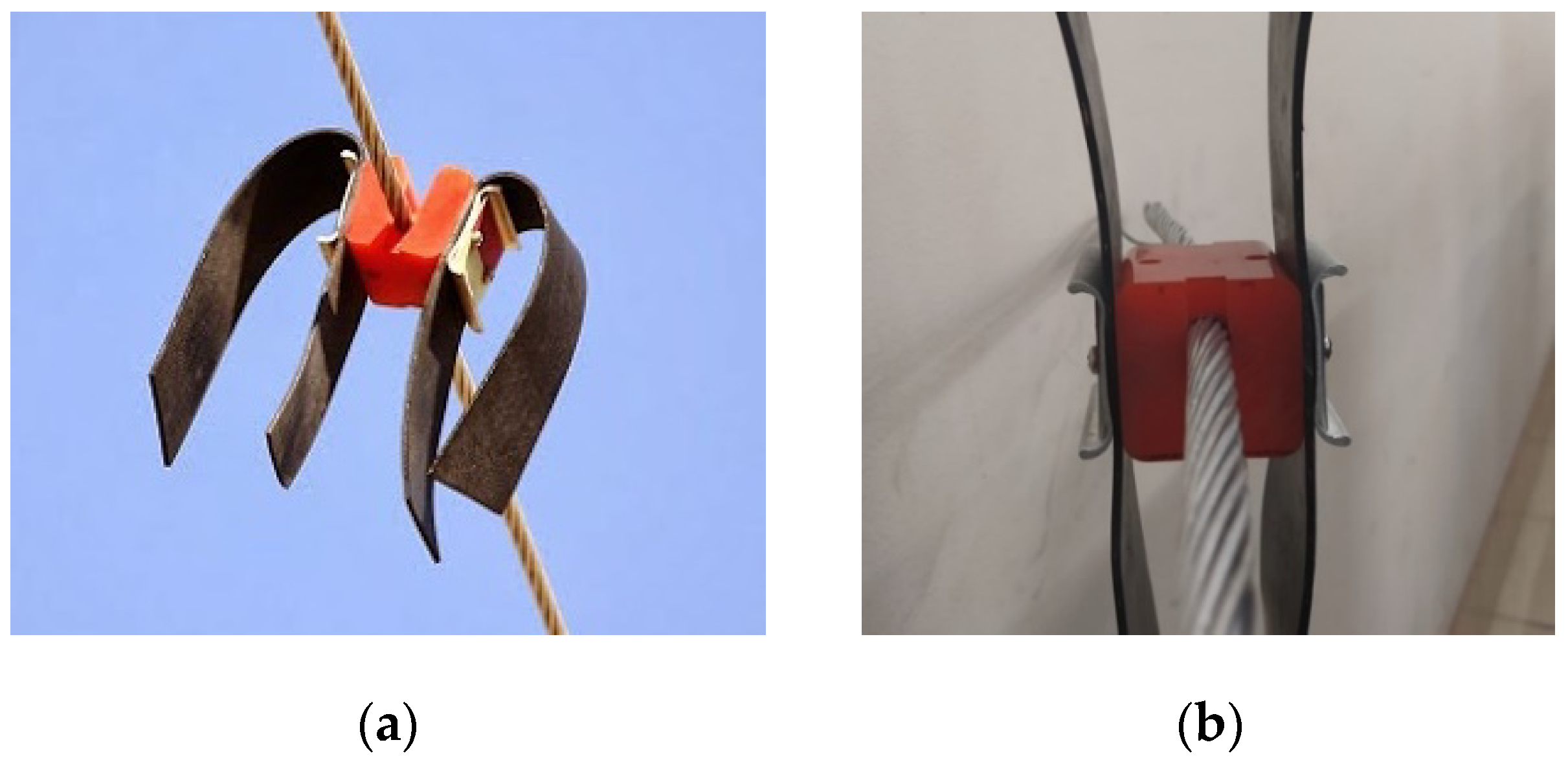
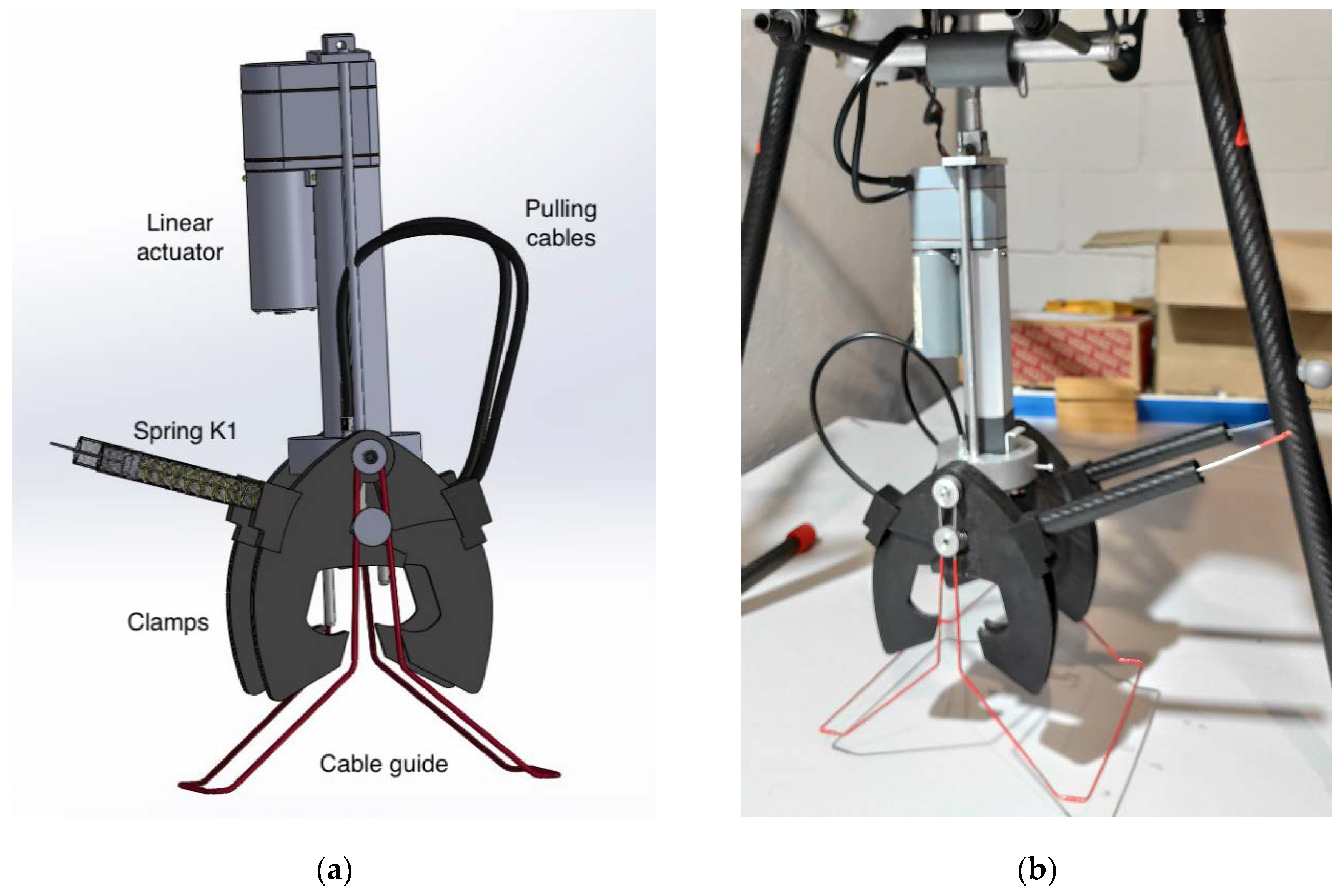
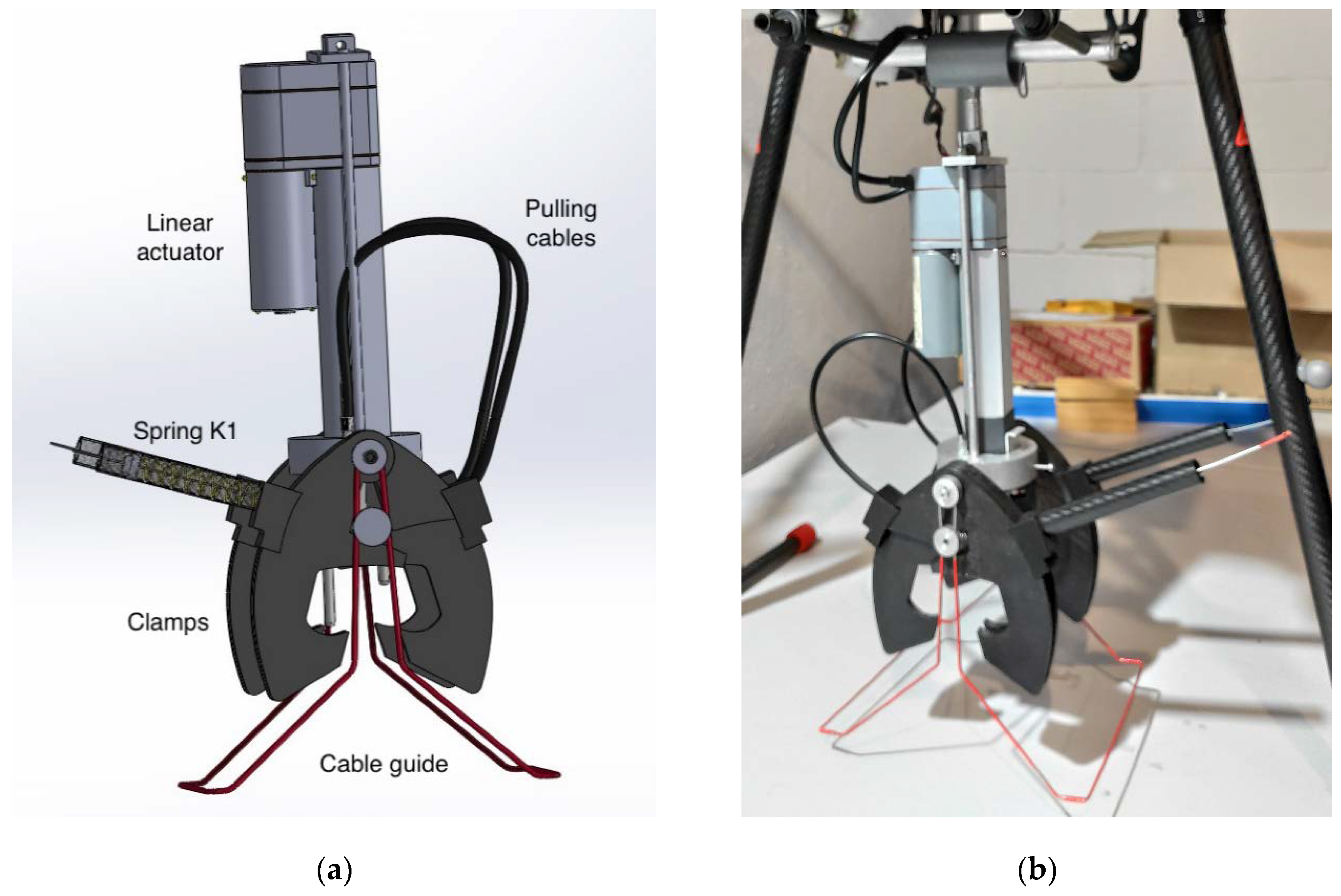
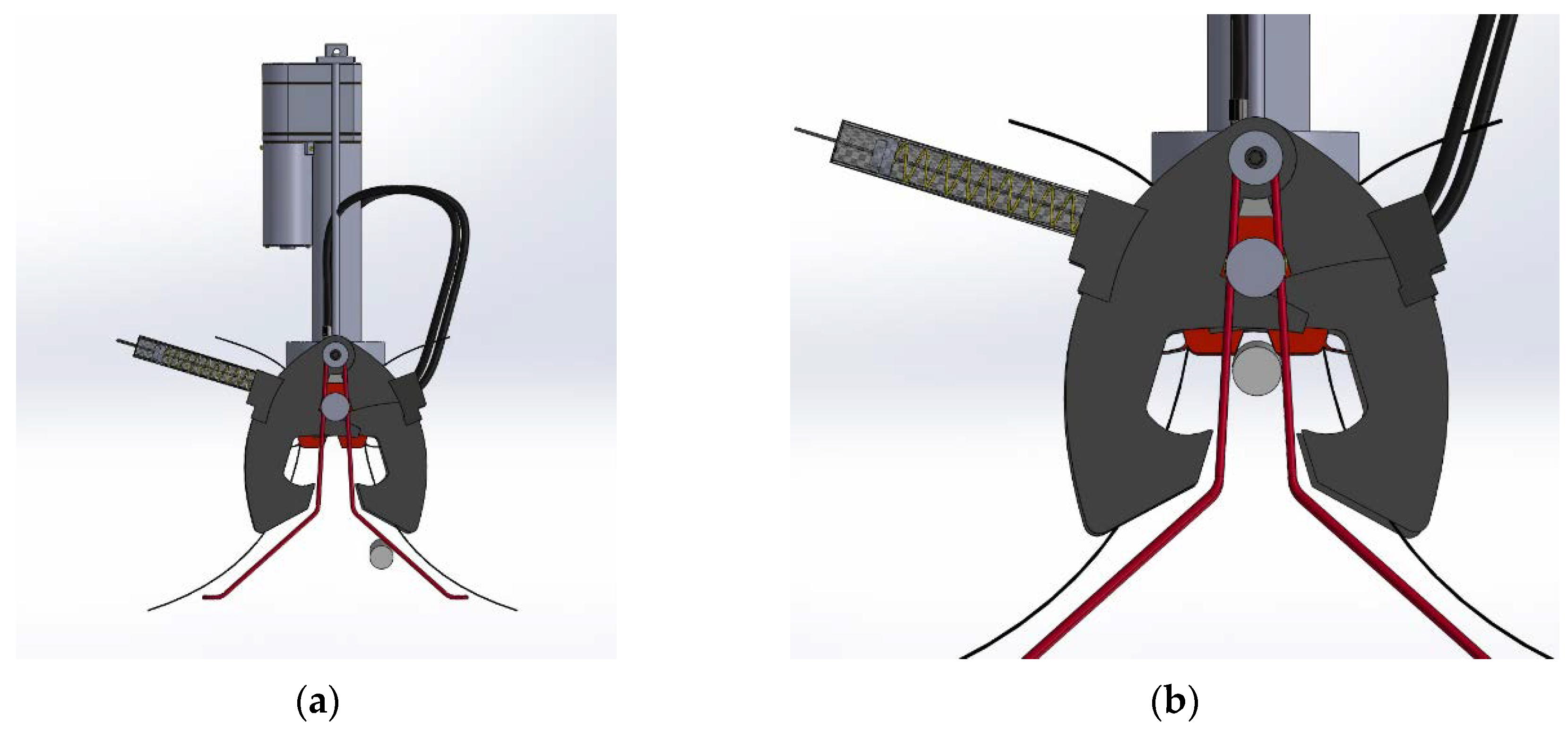
2.2. Diverter Installation Tool
- It should exert at least a () force on the bird diverter: () force to insert the clip plus () force as a safety margin.
- The force exerted on the UAV during the installation should be minimal.
- It should be operated easily.
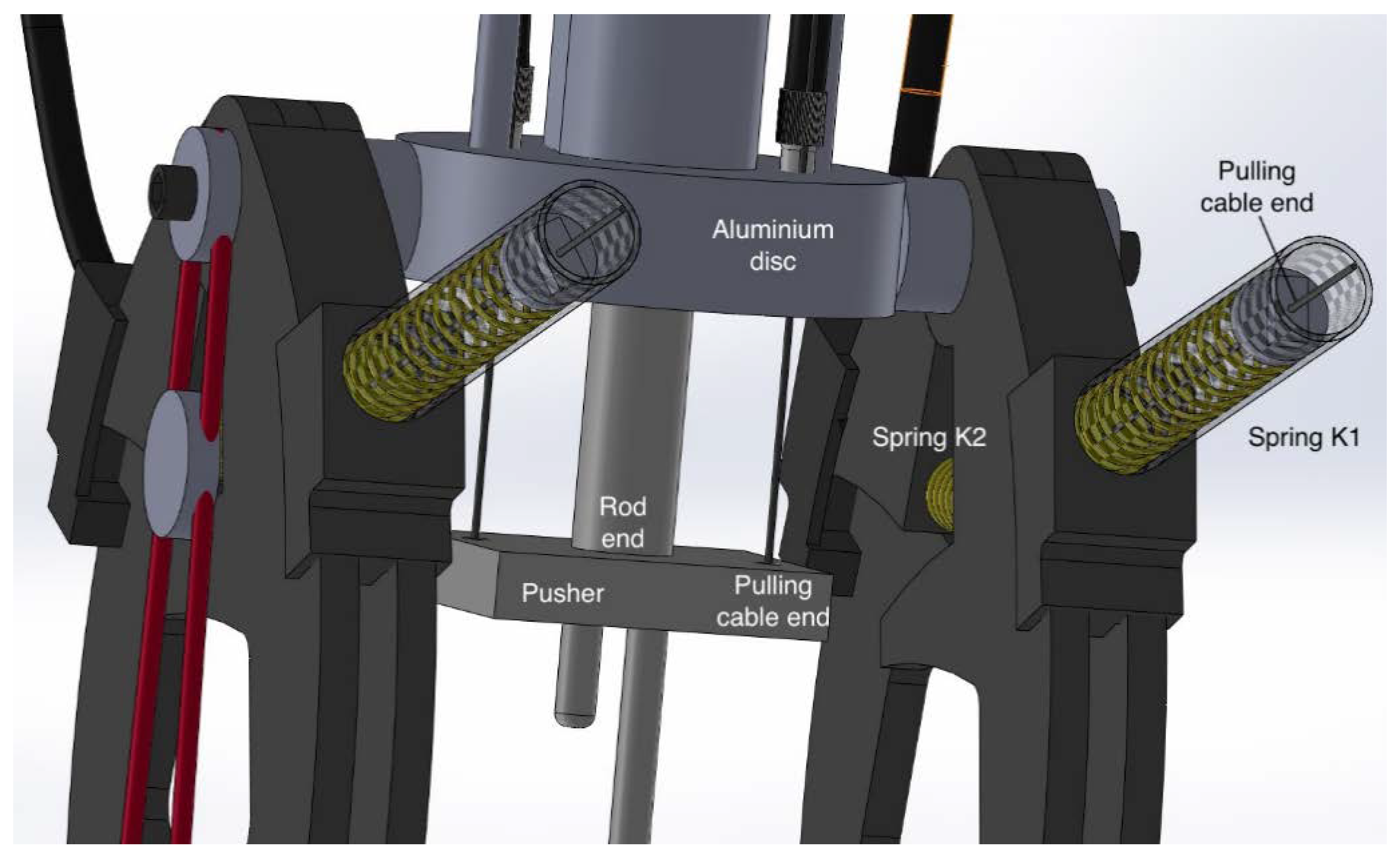
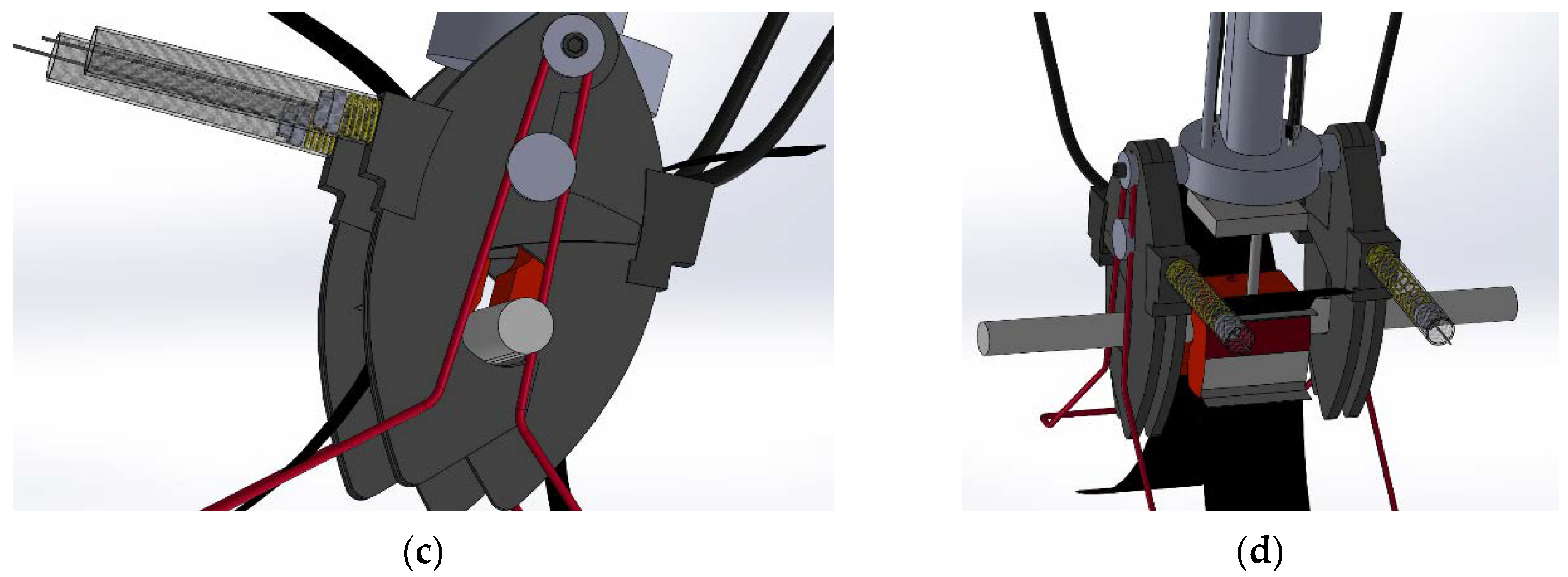
2.2.1. Tool Design and Mechanical Components
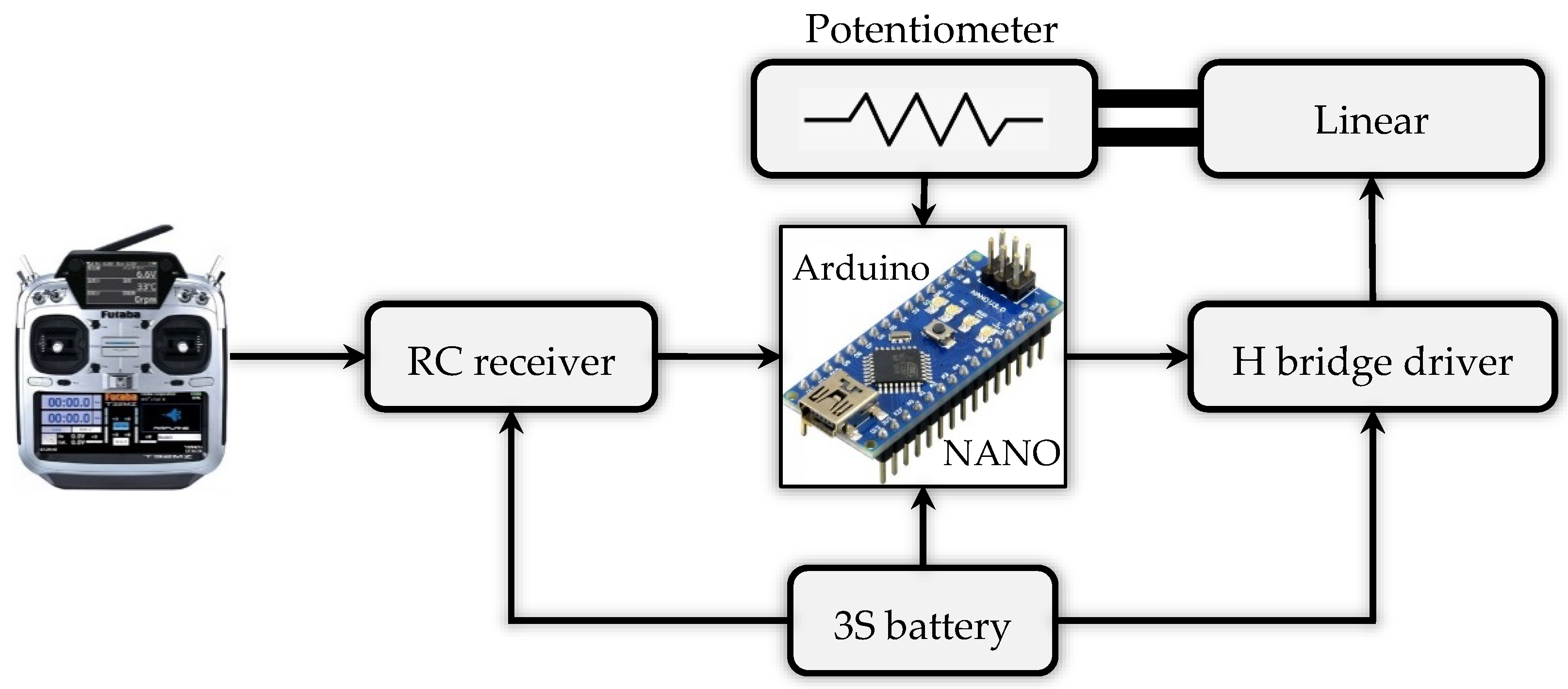
2.2.2. Control Electronics
2.2.3. Insertion Procedure
3. Experimental Results
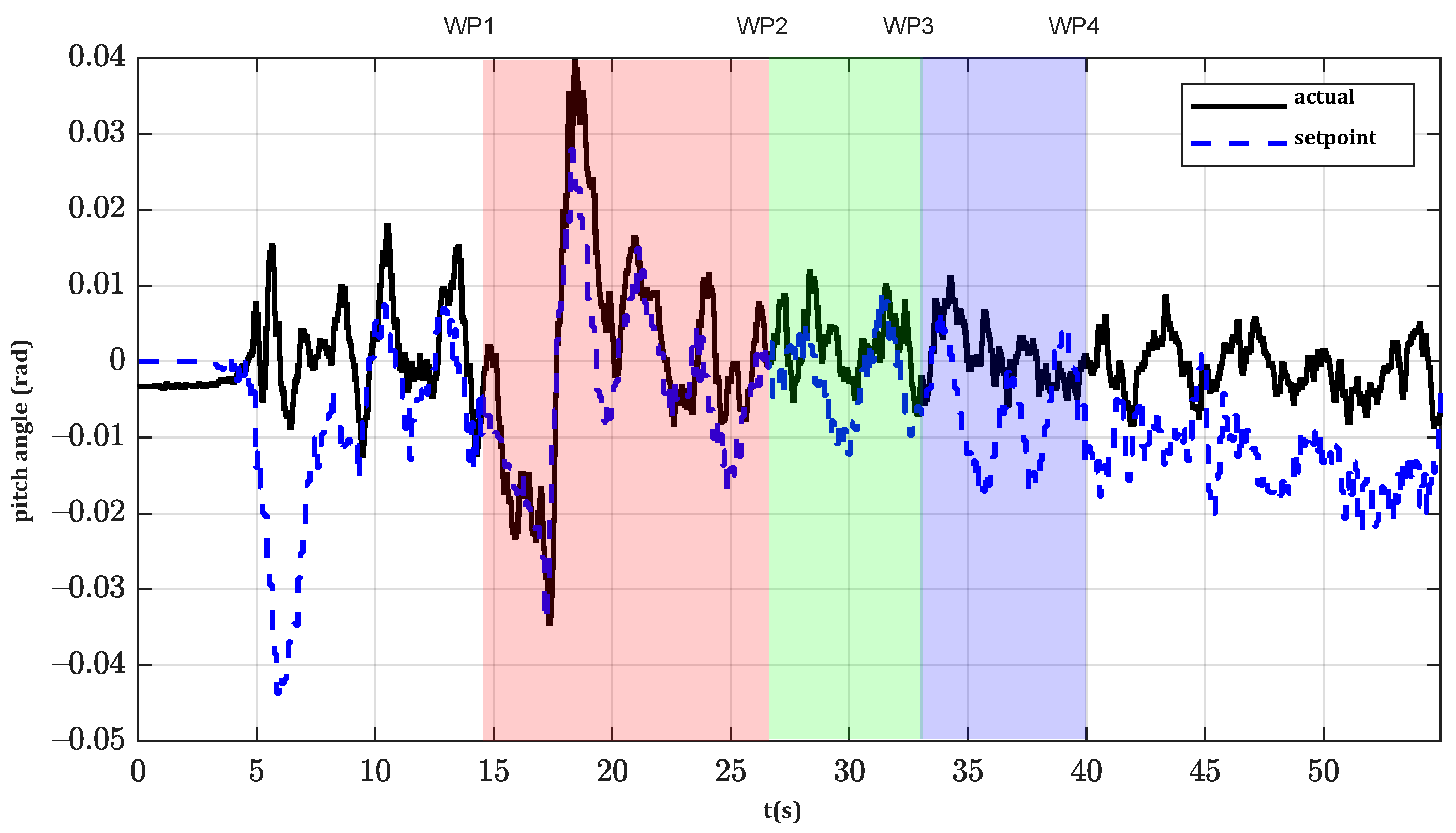
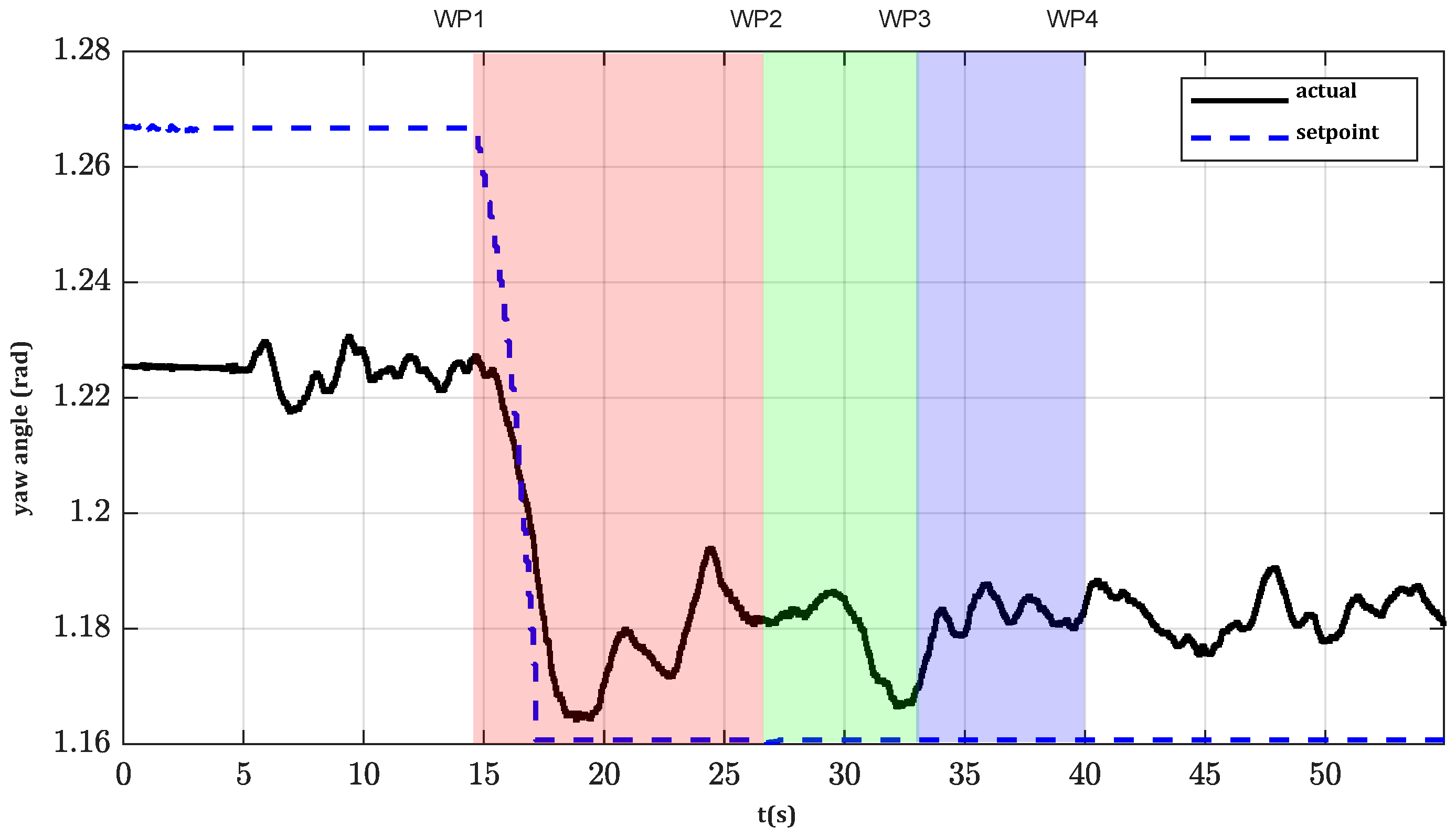
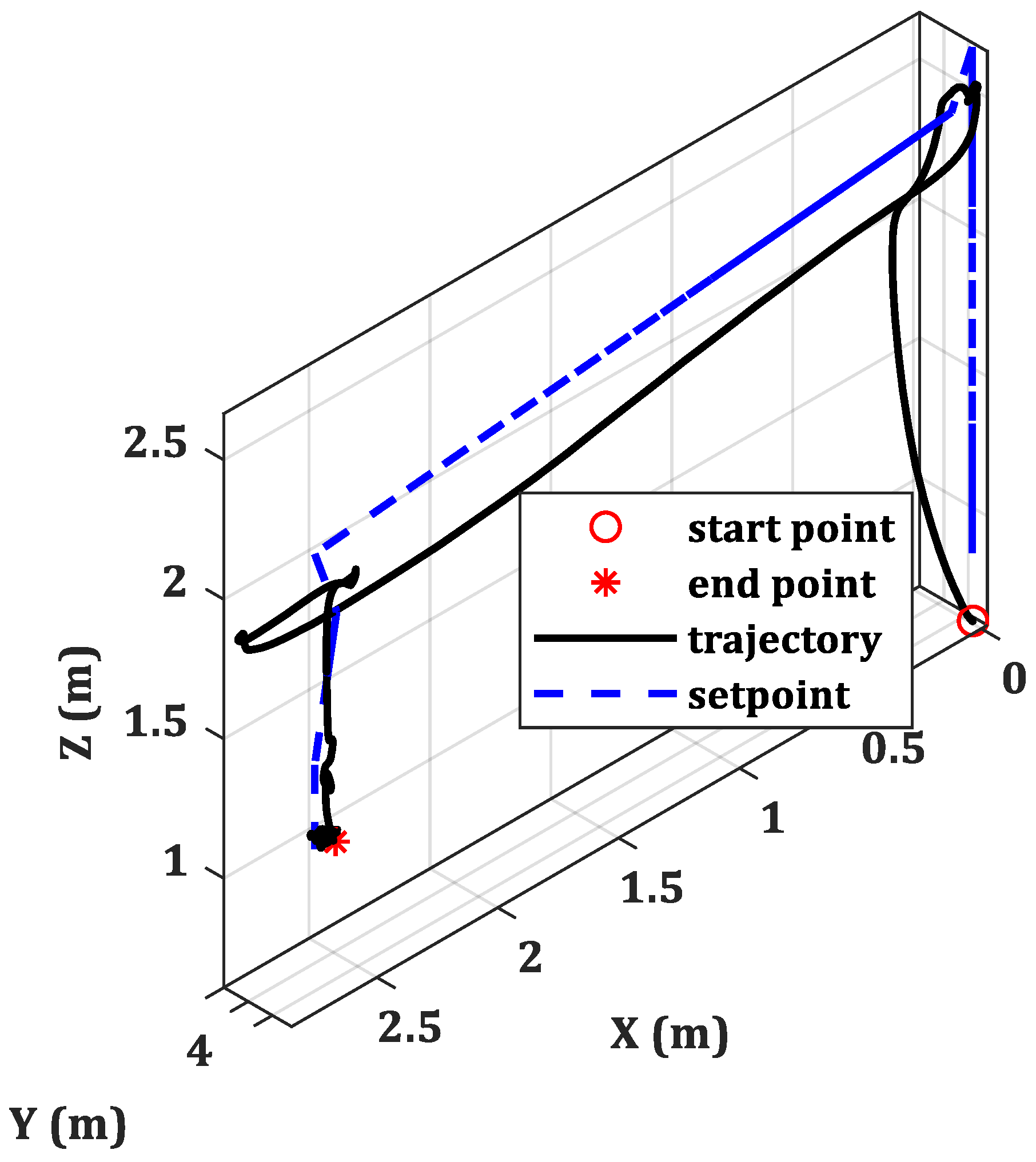
- −
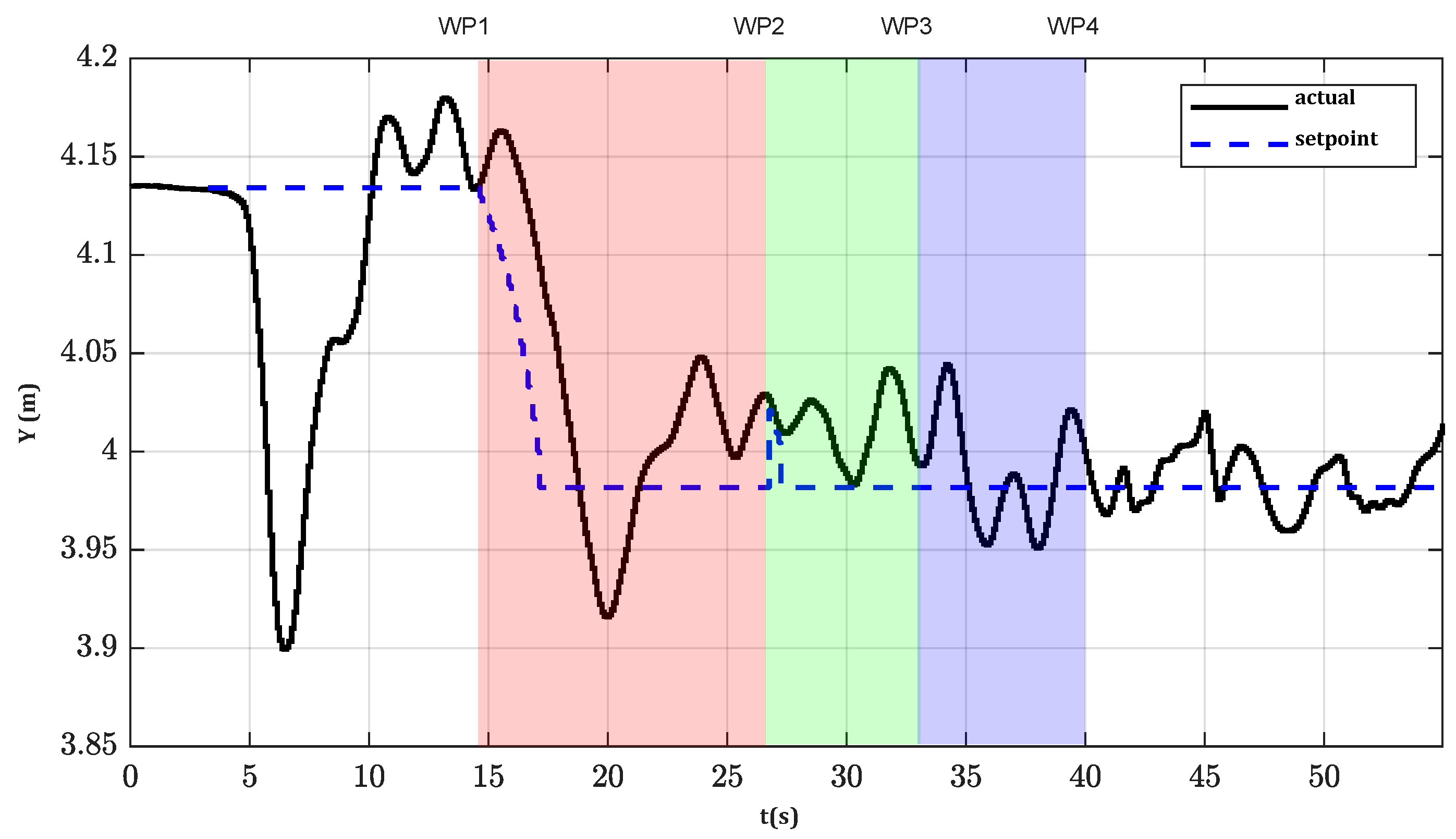
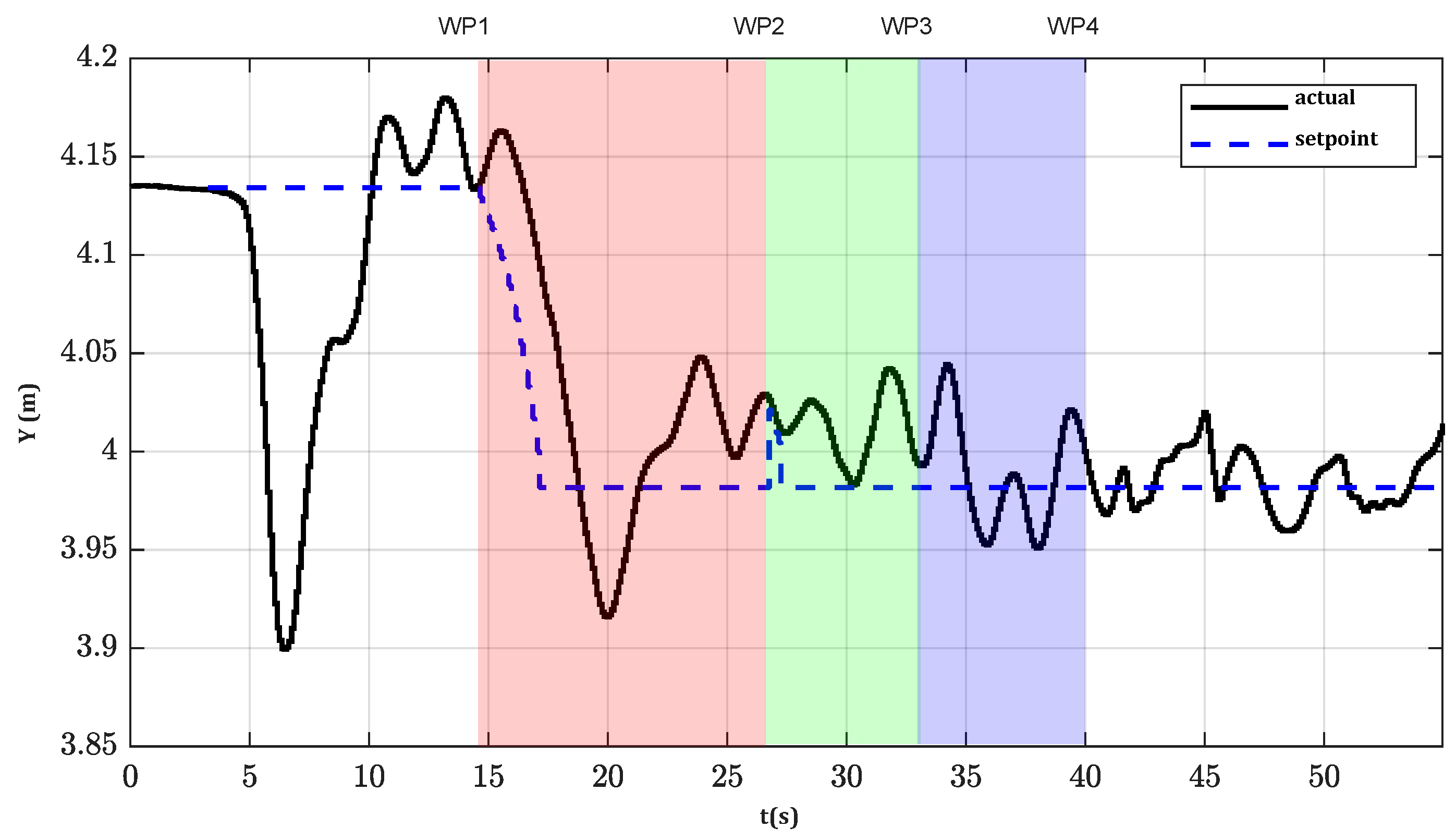
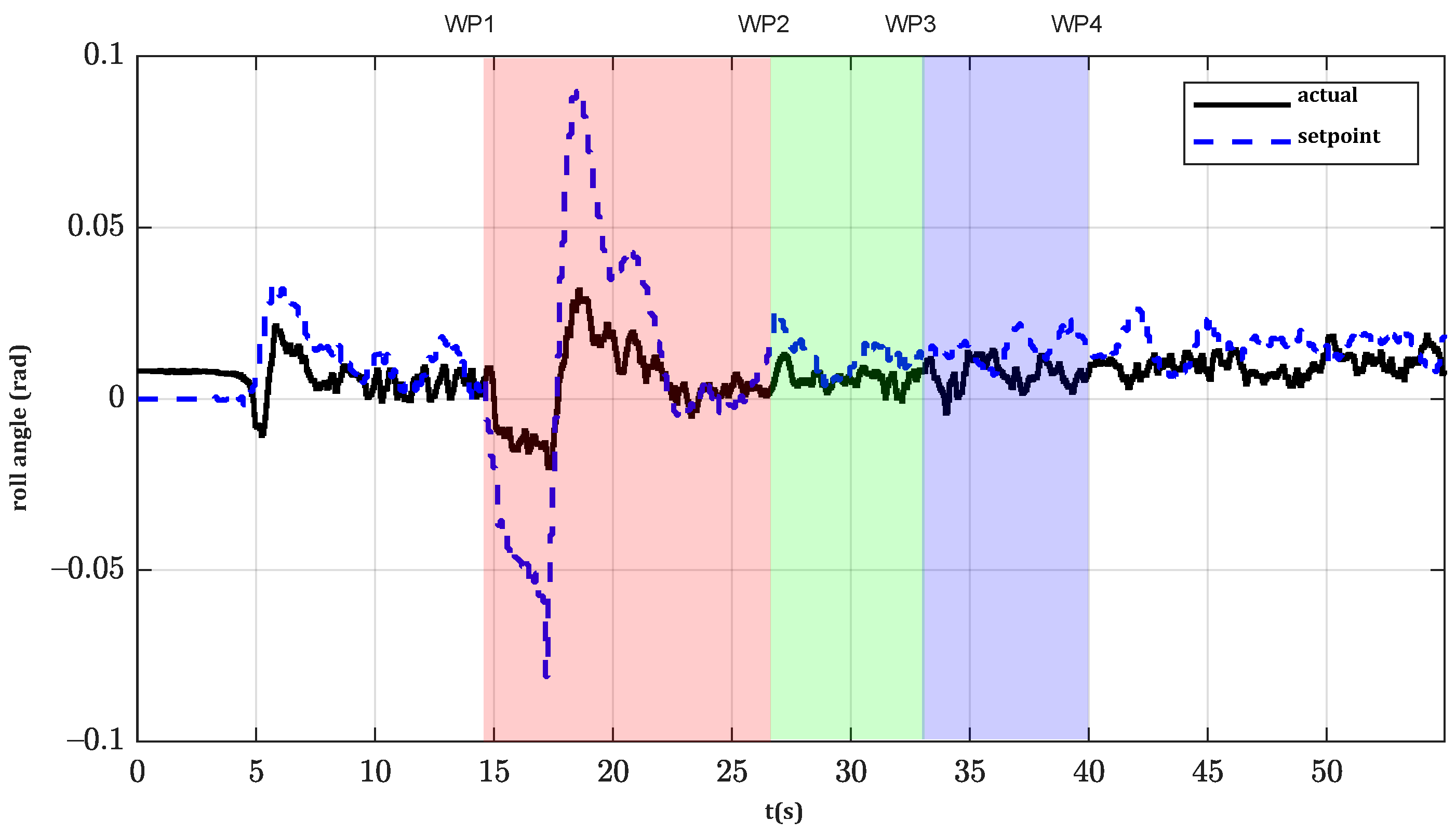
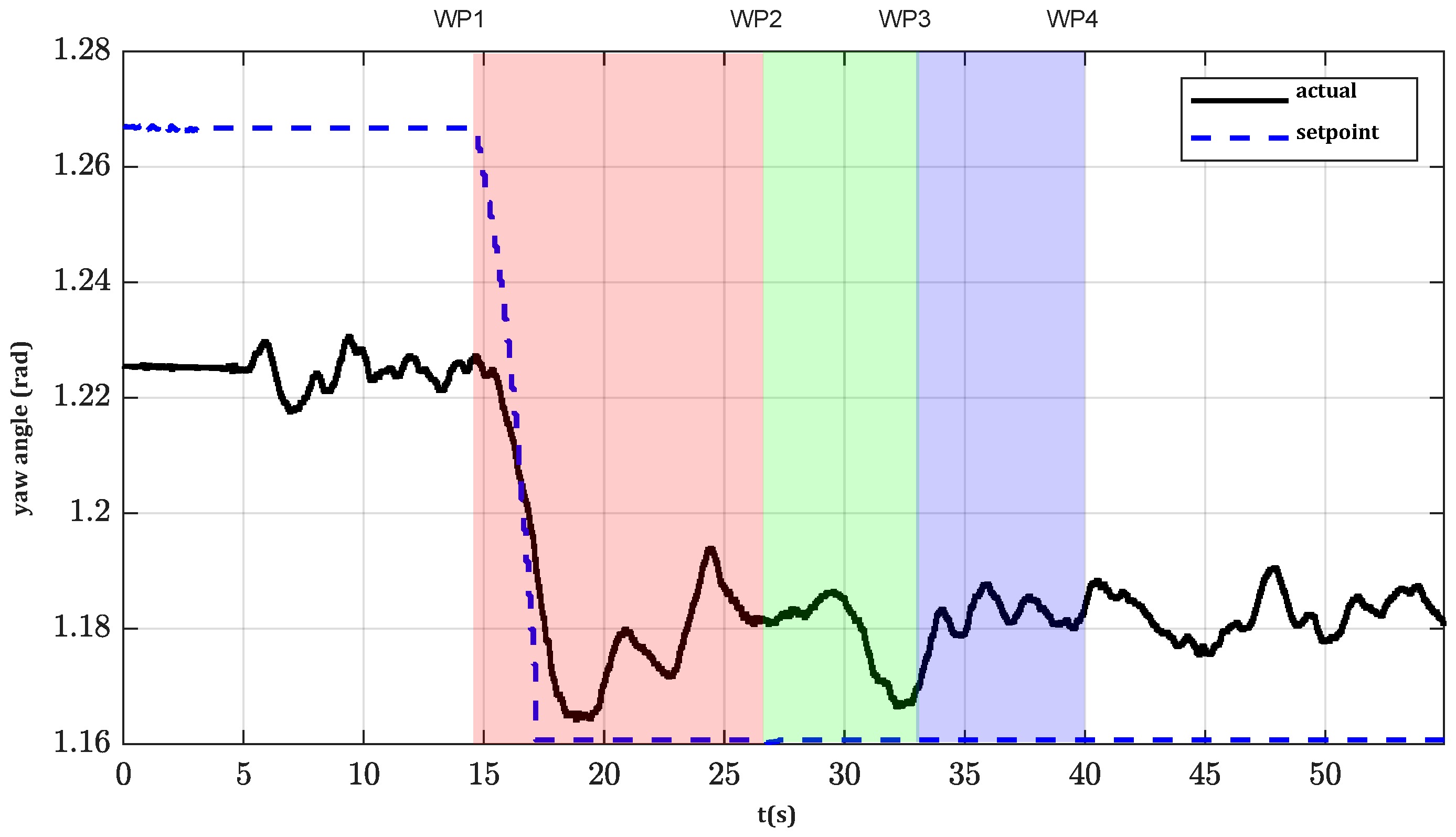
- WP1 is defined at a distance from the insertion point on the cable and a height.
- −
- WP2 is defined above the insertion point at a height ( above the cable).
- −
- WP3 is defined above the insertion point at a height ( above the cable).
- −
- WP4 is defined as the insertion point on the cable.
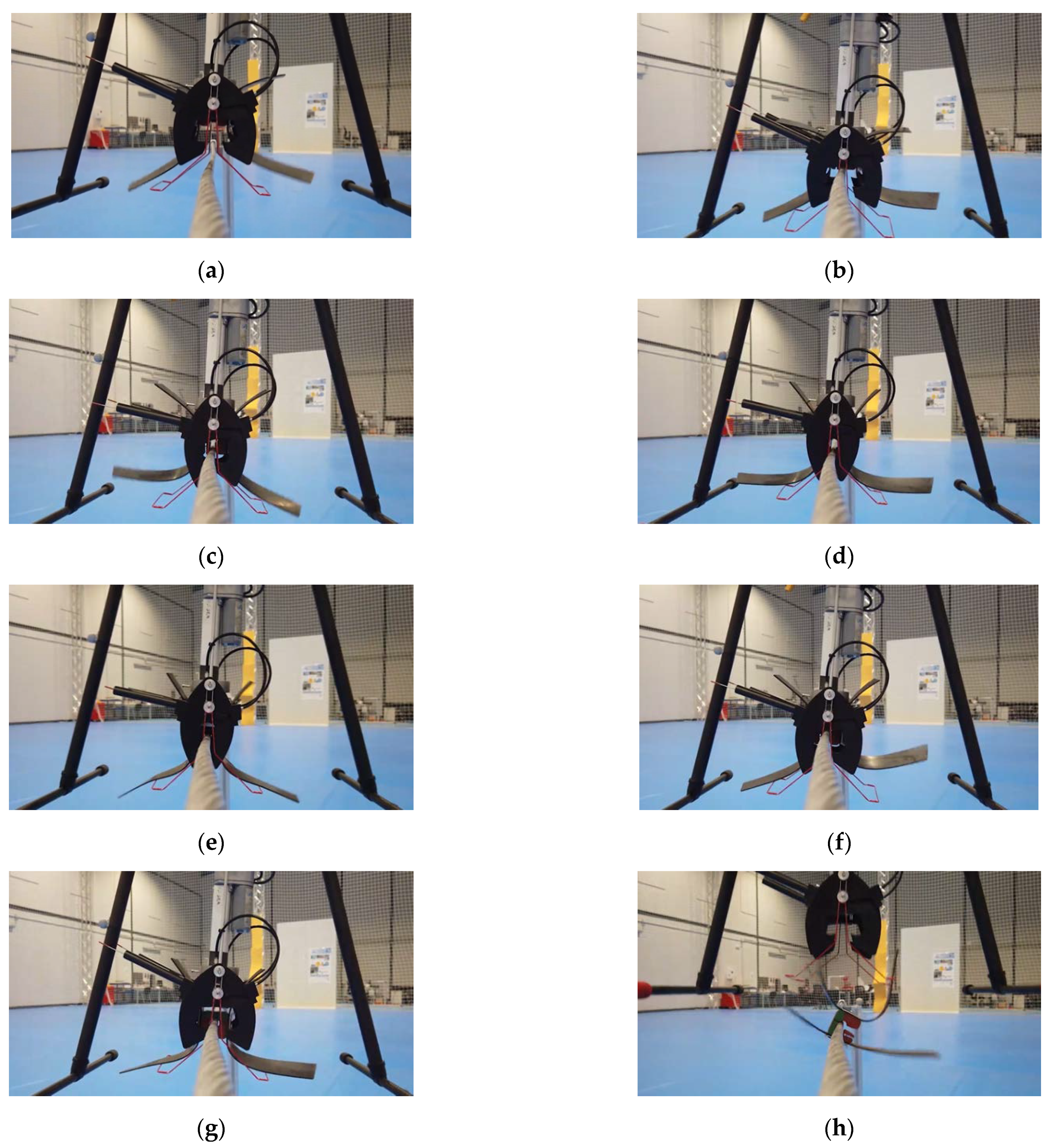
- The pilot sends a “Goto WP1” command to the aerial robot, and it takes off to WP1.
- After reaching WP1, the pilot sends a “Goto WP2” command, so the robot moves toward the cable, and the pilot waits until it is stabilized in that position.
- Then, the pilot sends consecutive “Goto WP3” and “Goto WP4” commands, and the aerial robot slowly descends to the insertion point (WP4). In this position, the cable is centered in the tool and inside the clamps.
- After WP4 has been reached, the pilot triggers the installation command, and the diverter installation tool starts its operation, automatically closing the clamps and inserting the clip on the cable.
- When the pilot visually confirms that the bird diverter has been deployed, he/she sends a fly-up command to the aerial robot, which is finally landed.
- Descending toward cable: the time it takes to navigate from WP2 to WP4 and until the pilot triggers the installation procedure. This time can vary because the pilot triggers the operation when he/she considers the UAV is stabilized enough in WP4.
- Clamping: the time the diverter installation tool takes to insert the bird diverter into the cable.
- Retreat: the time the linear actuator needs to retreat and open the clamps again, plus the time required to fly back to WP3. This time can also vary because the flyback command is manually triggered by the pilot.
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- European-Commission. Guidance on Energy Transmission Infrastructure and EU Nature Legislation; European-Commission: Brussels, Belgium, 2018. [Google Scholar]
- Sardaro, R.; Bozzo, F.; Fucilli, V. High-voltage overhead transmission lines and farmland value: Evidences from the real estate market in Apulia, southern Italy. Energy Policy 2018, 119, 449–457. [Google Scholar] [CrossRef]
- Red Eléctrica de España. Available online: https://www.ree.es/es/conocenos/principales-indicadores/red-de-transporte-circuito (accessed on 15 December 2020).
- Permanent-URL(a). Available online: https://aerial-core.eu/ (accessed on 15 December 2020).
- Kim, J.; Ham, Y. Vision-based analysis of utility poles using drones and digital twin modeling in the context of power distribution infrastructure systems. In Proceedings of the Construction Research Congress 2020, Tempe, Arizona, 8–10 March 2020; Computer Applications. pp. 954–963. [Google Scholar]
- Bizzarri, F.; Nitti, S.; Malgaroli, G. The use of drones in the maintenance of photovoltaic fields. E3S Web Conf. 2019, 119, 21. [Google Scholar] [CrossRef]
- Menéndez, O.; Pérez, M.; Auat Cheein, F. Visual-based positioning of aerial maintenance platforms on overhead transmission lines. Appl. Sci. 2019, 9, 165. [Google Scholar] [CrossRef] [Green Version]
- Reddy, A.; Indragandhi, V.; Ravi, L.; Subramaniyaswamy, V. Detection of Cracks and damage in wind turbine blades using artificial intelligence-based image analytics. Measurement 2019, 147, 106823. [Google Scholar] [CrossRef]
- Myeong, W.C.; Jung, K.Y.; Jung, S.W.; Jung, Y.H.; Myung, H. Drone-type wall-climbing robot platform for structural health monitoring. In Proceedings of the 6th International Conference on Advances in Experimental Structural Engineering/11th International Workshop on Advanced Smart Materials and Smart Structures Technology, Champaign, IL, USA, 1–2 August 2015. [Google Scholar]
- Kocer, B.B.; Tjahjowidodo, T.; Pratama, M.; Seet, G.G.L. Inspection-while-flying: An autonomous contact-based nondestructive test using UAV-tools. Autom. Constr. 2019, 106, 102895. [Google Scholar] [CrossRef]
- Ollero, A.; Heredia, G.; Franchi, A.; Antonelli, G.; Kondak, K.; Sanfeliu, A.; Viguria, A.; Martinez-de Dios, J.R.; Pierri, F.; Cortés, J. The aeroarms project: Aerial robots with advanced manipulation capabilities for inspection and maintenance. IEEE Robot. Autom. Mag. 2018, 25, 12–23. [Google Scholar] [CrossRef] [Green Version]
- Suarez, A.; Heredia, G.; Ollero, A. Lightweight compliant arm with compliant finger for aerial manipulation and inspection. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4449–4454. [Google Scholar]
- Sanchez-Cuevas, P.J.; Gonzalez-Morgado, A.; Cortes, N.; Gayango, D.B.; Jimenez-Cano, A.E.; Ollero, A.; Heredia, G. Fully-actuated aerial manipulator for infrastructure contact inspection: Design, modeling, localization, and control. Sensors 2020, 20, 4708. [Google Scholar] [CrossRef]
- Trujillo, M.Á.; Martínez-de Dios, J.R.; Martín, C.; Viguria, A.; Ollero, A. Novel aerial manipulator for accurate and robust industrial NDT contact inspection: A new tool for the oil and gas inspection industry. Sensors 2019, 19, 1305. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Danko, T.W.; Chaney, K.P.; Oh, P.Y. A parallel manipulator for mobile manipulating UAVs. In Proceedings of the 2015 IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 11–12 May 2015; pp. 1–6. [Google Scholar]
- Larrauri, J.I.; Sorrosal, G.; González, M. Automatic system for overhead power line inspection using an Unmanned Aerial Vehicle—RELIFO project. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 244–252. [Google Scholar]
- Pagnano, A.; Höpf, M.; Teti, R. A roadmap for automated power line inspection. Maintenance and repair. Procedia Cirp 2013, 12, 234–239. [Google Scholar] [CrossRef]
- He, T.; Zeng, Y.; Hu, Z. Research of multi-rotor UAVs detailed autonomous inspection technology of transmission lines based on route planning. IEEE Access 2019, 7, 114955–114965. [Google Scholar] [CrossRef]
- Teng, G.E.; Zhou, M.; Li, C.R.; Wu, H.H.; Li, W.; Meng, F.R.; Zhou, C.C.; Ma, L. Mini-UAV LiDAR for power line inspection. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W7, 297–300. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Yang, B.; Xiao, W.; Liang, F.; Liu, Y.; Wang, Z. Automatic extraction of high-voltage power transmission objects from UAV lidar point clouds. Remote Sens. 2019, 11, 2600. [Google Scholar] [CrossRef] [Green Version]
- Schofield, O.B.; Lorenzen, K.H.; Ebeid, E. Cloud to cable: A drone framework for autonomous power line inspection. In Proceedings of the 2020 23rd Euromicro Conference on Digital System Design (DSD), Kranj, Slovenia, 26–28 August 2020; pp. 503–509. [Google Scholar]
- da Silva, M.F.; Honorio, L.M.; Marcato, A.L.M.; Vidal, V.F.; Santos, M.F. Unmanned aerial vehicle for transmission line inspection using an extended Kalman filter with colored electromagnetic interference. ISA Trans. 2020, 100, 322–333. [Google Scholar] [CrossRef] [PubMed]
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless charging techniques for UAVs: A review, reconceptualization, and extension. IEEE Access 2018, 6, 29865–29884. [Google Scholar] [CrossRef]
- Simic, M.; Bil, C.; Vojisavljevic, V. Investigation in wireless power transmission for UAV charging. Procedia Comput. Sci. 2015, 60, 1846–1855. [Google Scholar] [CrossRef] [Green Version]
- Suarez, A.; Salmoral, R.; Zarco-Periñan, P.J.; Ollero, A. Experimental evaluation of aerial manipulation robot in contact with 15 kV power line: Shielded and long reach configurations. IEEE Access 2021, 9, 94573–94585. [Google Scholar] [CrossRef]
- Barrientos, R.; Ponce, C.; Palacín, C.; Martín, C.A.; Martín, B.; Alonso, J.C. Wire marking results in a small but significant reduction in avian mortality at power lines: A BACI designed study. PLoS ONE 2012, 7, e32569. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ferrer, M.; Morandini, V.; Baumbusch, R.; Muriel, R.; De Lucas, M.; Calabuig, C. Efficacy of different types of “bird flight diverter” in reducing bird mortality due to collision with transmission power lines. Glob. Ecol. Conserv. 2020, 23, e01130. [Google Scholar] [CrossRef]
- Dwyer, J.F.; Pandey, A.K.; McHale, L.A.; Harness, R.E. Near-ultraviolet light reduced Sandhill Crane collisions with a power line by 98%. Condor 2019, 121, duz008. [Google Scholar] [CrossRef]
- Dashnyam, B.; Purevsuren, T.; Amarsaikhan, S.; Bataa, D.; Buuveibaatar, B.; Dutson, G. Malfunction rates of bird flight diverters on powerlines in the Mongolian Gobi. Mong. J. Biol. Sci. 2016, 14, 13–20. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Number | 1 | 2 | 3 | Average |
|---|---|---|---|---|
| Descending toward cable | 11 s | 7 s | 9 s | 9 s |
| Clamping | 10 s | 10 s | 10 s | 10 s |
| Retreat | 16 s | 10 s | 15 s | 13.6 s |
| Total time | 37 s | 27 s | 34 s | 32.6 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodriguez-Castaño, A.; Nekoo, S.R.; Romero, H.; Salmoral, R.; Acosta, J.Á.; Ollero, A. Installation of Clip-Type Bird Flight Diverters on High-Voltage Power Lines with Aerial Manipulation Robot: Prototype and Testbed Experimentation. Appl. Sci. 2021, 11, 7427. https://doi.org/10.3390/app11167427
Rodriguez-Castaño A, Nekoo SR, Romero H, Salmoral R, Acosta JÁ, Ollero A. Installation of Clip-Type Bird Flight Diverters on High-Voltage Power Lines with Aerial Manipulation Robot: Prototype and Testbed Experimentation. Applied Sciences. 2021; 11(16):7427. https://doi.org/10.3390/app11167427
Chicago/Turabian StyleRodriguez-Castaño, Angel, Saeed Rafee Nekoo, Honorio Romero, Rafael Salmoral, José Ángel Acosta, and Anibal Ollero. 2021. "Installation of Clip-Type Bird Flight Diverters on High-Voltage Power Lines with Aerial Manipulation Robot: Prototype and Testbed Experimentation" Applied Sciences 11, no. 16: 7427. https://doi.org/10.3390/app11167427
APA StyleRodriguez-Castaño, A., Nekoo, S. R., Romero, H., Salmoral, R., Acosta, J. Á., & Ollero, A. (2021). Installation of Clip-Type Bird Flight Diverters on High-Voltage Power Lines with Aerial Manipulation Robot: Prototype and Testbed Experimentation. Applied Sciences, 11(16), 7427. https://doi.org/10.3390/app11167427