1. Introduction
With control and communication technology being applied to transportation systems, vehicular platoon driving has gradually become a new driving mode. Researchers generally believe that it can reduce pollutant emissions and improve transportation efficiency and safety. Compared with human driving, a connected and automated vehicles (CAVs) platoon can shorten the distance between vehicles and increase the capacity without the building of new roads [
1]. In addition, platoon driving can improve efficiency by reducing their air resistance, and thereby improve energy consumption to achieve the goal of energy saving. In addition, in terms of system transportation and safety, platoon driving also has irreplaceable advantages.
The use of communication and digital development in vehicles and on the highway in the form of an intelligent vehicle/highway system is an approach that promises to realize real-time location awareness and information communication between vehicles, roadside facilities, and cloud platforms. Lane following and cruise control technologies of platoon driving were proposed. Liu et al. [
2] proposed a coupling control method for path tracking and maintaining spacing based on a reference vector field. Kim [
3] presented a novel approach for the longitudinal control of a truck platoon as the trucks move along a curved lane, as well as a straight line. Li et al. [
4] proposed a novel platoon formation and optimization model by combining graph theory and safety potential field theory for CAVs under different vehicle distributions. However, to a certain extent, it is necessary to realize the large-scale horizontal and lane-changing maneuvers of a fully autonomous self-driving platoon [
5].
The research into lane changing can be divided into the control level and the strategy level. The control level regards lane changing as a unified lateral navigation algorithm. The desired yaw rate is generated by the yaw angle tracking controller, and then the lane changing is implemented by manipulating the front wheel [
6]. At the strategy level, the time and opportunity of lane changing are studied on the premise of avoiding vehicle collisions. This study mainly investigated platoon lane changing at the strategic level. Hsu [
7,
8] described three platoon lane changing (PLC) maneuvers for an entire platoon to change lanes with fixed spacing based on the split, lane changing, and join maneuvers. He also designed the leader and predecessor PLC maneuvers under the coordinated and noncoordinated platoon infrastructures in 2008. Keßler et al. [
9] presented a control concept for the lane-changing maneuver of the complete platoon, which enables the following vehicles to track the path of their preceding vehicles based only on the relative position to the predecessor using onboard sensors. Li et al. [
10] derived a safety region for the relative velocity between two platoons under four control laws, including leader law, join law, split law, and decelerate-to-change-lane law. By guaranteeing that the relative velocity between platoons remains in this region, high relative velocity impacts can be avoided. However, they studied lane changing from the perspective of a platoon as a whole without considering the feasibility of lane changing and the relationship between vehicles in the platoon.
In the research on non-platoon vehicle lane changing, the relationship between vehicles is well-considered and is worthy of reference. Schubert et al. [
11] proposed a minimized lane-changing braking model and stipulated the rules for vehicles to change lanes randomly or compulsorily. Zheng [
12] found that the scholars who studied lane-changing maneuvers mostly focused on lane-changing conditions and believed that is one of the necessary elements for the realization of lane changing. Wu et al. [
13] employed time-variant safety margins to ensure a safe maneuver during trajectory planning. Most of the studies on lane-changing conditions are based on gap theory, which states that when the critical safety distance meets the requirements, an accident will not occur. Nilsson et al. [
14] proposed a model to determine the best time to change lanes on the basis of anti-collision mechanism, speed constraints, etc. However, the safety distance in the lane-changing process is not a certain value under different circumstances and is difficult to estimate. Xu et al. [
15] proposed a new dynamic ellipse minimum safe distance model based on different speeds and different driver types. Meanwhile, lane changing was classified according to the driver’s sensitivity to the safety distance. Li et al. [
16] used the safety potential field model to classify the critical conditions of vehicle lane changing, and established a vehicle lane-changing model by considering vehicle speed and acceleration. With the development of the strategy of lane-changing behavior reflecting driving factors and the method of determining the appropriate lane changing trajectory, non-platoon-vehicle lane changing with different driving styles (slow and cautious or sudden and aggressive) can be simulated by changing the parameters of models.
The safety gap of non-platoon vehicles cannot be applied to that of vehicles in the platoon. In the non-platoon-vehicle lane-changing process, the distance that allows for avoiding a collision between the lane-changing vehicle and other vehicles is the minimum safe critical distance. However, the difference between platoon lane changing and non-platoon-vehicle lane changing is that the vehicles in the platoon can tolerate smaller safety distances because of their unique cooperative characteristics. Meanwhile, the distance should not be too large, which will lead to the dissolution of a platoon in the high-speed scene. Another way is to undertake platoon lane changing in dissolution. If the platoon is disbanded before or during the lane changing, the vehicles change lanes one by one according to the lane-changing gap of individual vehicles, and then all the vehicles form a platoon again. This method wastes the advantage of efficient transportation for a platoon, and the platoon cannot usually be reorganized after it is disbanded. Due to the high speed of vehicles on the highway, the state of the following vehicles and the leading vehicles will become greatly different over a short time; thus, it is difficult to realize platoon re-combination. Therefore, it is necessary to find a reasonable dynamic gap between platoon vehicles.
Many studies use the safety potential field to characterize the spatial distribution of driving risk around vehicles in complex traffic environments. The safety potential field theory is applied to the safe distance between individual traffic participants to prevent collisions [
17,
18,
19]. Ni et al. [
20,
21] demonstrated the objectivity and universality of the potential field in traffic from both macro and micro perspectives and calibrated the potential field car-following model using NGSIM (next-generation simulation) data. Wang et al. [
22,
23] established a unified model to characterize the “driving risk field” based on the previous research, put forward the concept of a “driving risk field,” and validated the model with real vehicles. The results show that the model can provide an effective method for evaluating the driving risk in a complex traffic environment. The field theory opens up a new perspective for traffic flow modeling. In our previous research, we took safe driving as the goal and established a lane-changing model for non-platoon vehicles based on the safety potential field in combination with the characteristics of real-time perception and sharing of vehicle speed, acceleration, and other information in the CAVs system [
16,
24]. In this study, based on the original research, a new field model that is suitable for platoon lane changing was established. The dynamic gaps for different motion states were proposed.
The contributions of this study are as follows:
For the first time, a gravitational potential field was introduced to represent the traction between intra-platoon vehicles;
The gravitational potential field and repulsive potential field were unified into a system that is named the “intra-platoon potential field”;
The concept and calculation method of a dynamic gap of safety interval for platoon lane changing was proposed;
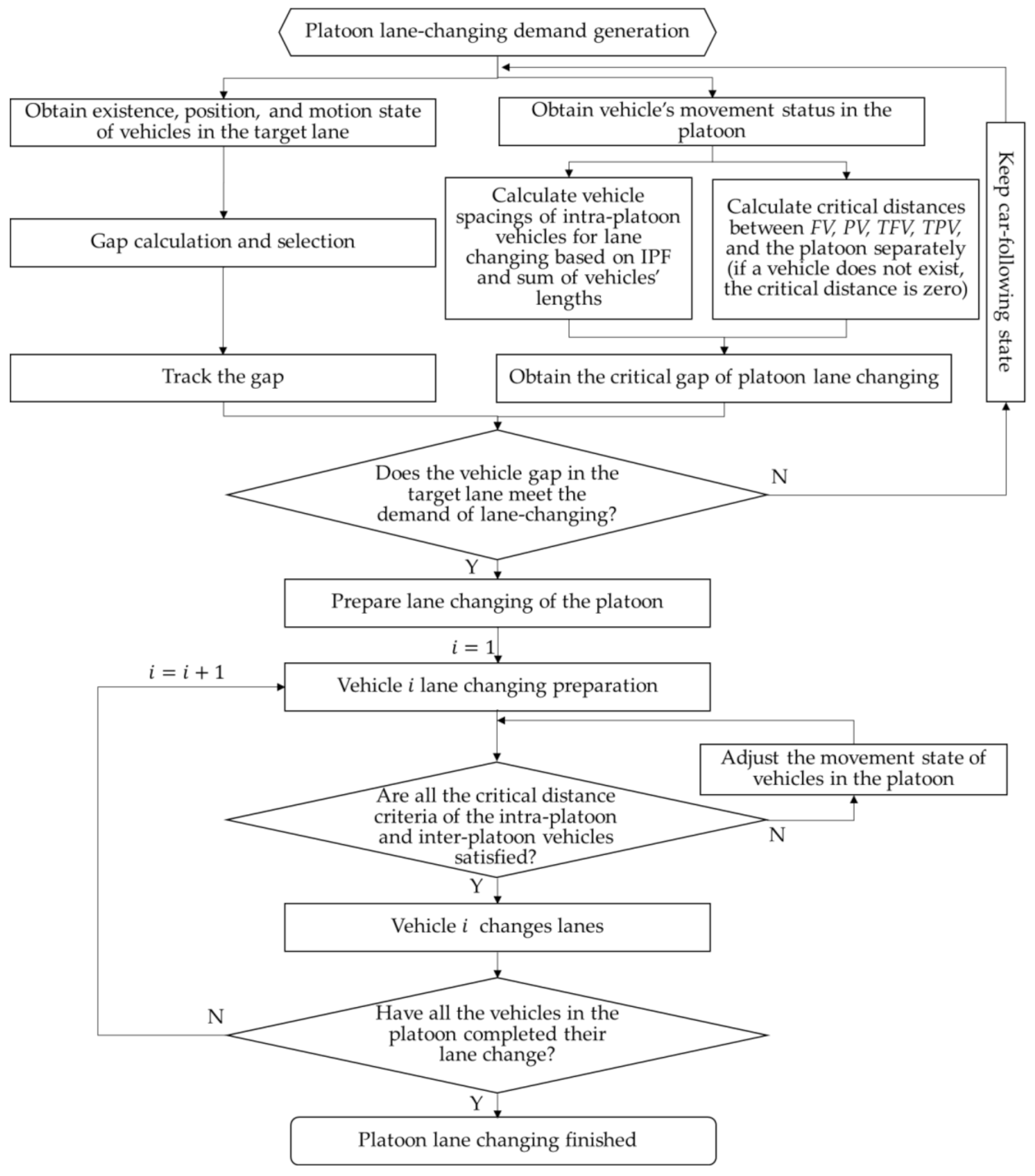
The method framework of entire-platoon lane changing was proposed and related experiments were carried out.
The remainder of this paper is organized as follows. First, the scenario description for platoon lane changing is defined in
Section 2. Then, in
Section 3, an intra-platoon potential field model is constructed and the potential field distribution of the vehicle under different motion states is analyzed in detail. According to the intra-platoon potential field model, the design of the platoon-lane-changing process and safety distance threshold model of avoiding crashes are given in
Section 4.
Section 5 presents the numerical simulation results and comparative verification, along with a discussion. Finally, the conclusions are summarized in
Section 6.
2. Definition of Lane Changing for a Platoon
The typical lane-changing scenario of a platoon is described in this section. As shown in
Figure 1, the platoon is the series of vehicles in red,
is the leading vehicle,
is the middle vehicle, and
is the rear vehicle in the subject platoon. The platoon is directly related to the spatial position and motion states of vehicles in yellow, black, green, and purple. The yellow vehicle is the following vehicle in the current lane
, and the black vehicle is the preceding vehicle in the current lane
. Meanwhile, the green and purple vehicles are the following vehicle
and the preceding vehicle
in the target lane.
There are many types of crash accidents, including lateral scuffing, a side crash, and a rear-end crash. When the platoon is changing lanes, the last two crash forms are possible between platoon vehicles and
, which is shown in
Figure 2.
Based on the above analysis of the lane-changing scenario, vehicles with a great impact on the safety of a lane-changing platoon were analyzed. That is, the front and rear vehicles in the current lane and the target lane. However, the vehicle behind usually decides its actions according to the motion state of the vehicle in front; therefore, the vehicle has no effect on the platoon.
The platoon vehicles and non-platoon vehicles may be involved in crashes as follows. Rear-end collisions could happen between platoon vehicles
/
with the following vehicle in the target lane
, as shown in
Figure 2a,e; between platoon vehicles
/
with the preceding vehicle in the same lane
, as shown in
Figure 2d,h; and between the leading vehicle
and the preceding vehicle in the target lane
, as shown in
Figure 2b. A side crash could happen between the leading vehicle
and the preceding vehicle in the target lane
, as shown in
Figure 2c. During the platoon-lane-changing process, rear collisions and side crashes may occur between vehicles in the platoon, as shown in
Figure 2f,g. Many researchers have studied collisions between non-platoon vehicles. Thus, this study focused on avoiding the two kinds of conflicts in
Figure 2f,g, which occur with intra-platoon vehicles.
In addition, this study only focused on the case of lane changing from the fast lane to the slow lane for analysis; the contrary lane changing is similar to this case and is omitted because of space limitation.
3. Intra-Platoon Potential Field
The intra-platoon potential field (IPF) is a physical field that denotes the spatial distribution of risk between targets in complex traffic environments. The targets refer to objects, such as vehicles, pedestrians, and cyclists, that could collide or their current status could result in significant losses.
Microscopic driving behavior in the traffic environment was mapped to potential field theory [
19,
24,
25]. The vehicle will be affected by its environment in the process of driving. Generally speaking, no matter what kind of driving behavior the vehicle displays, its purpose is to achieve its movement purpose under the premise of ensuring driving safety. Taking lane-changing behavior as an example, during the process, the key to determining whether lane-changing behavior can be successful is to keep a safe distance between the vehicle and other vehicles around it. Although there is no substantial physical contact between the lane-changing vehicles and their surrounding vehicles, their motion state changes due to the surrounding position state. This indicates that there is a virtual force acting on the lane-changing vehicle, which causes it to change its motion state, where the virtual force is provided by the surrounding vehicles. The virtual force can be mapped to the field force because it is not determined by contact but due to the distribution of spatial positions. This shows that there is a potential field in the lane-changing scene and even in the traffic system, which represents the driving risk caused by the traffic environment.
In the traditional model of the acceptable gap theory, the field model usually only considers the repulsion field between the lane-changing vehicles and other vehicles around it to obtain the critical minimum safe distance during lane changing. However, the difference between platoon lane changing and non-platoon-vehicle lane changing is that the vehicles in the platoon can tolerate smaller safety distances because of the characteristics of the platoon and CAVs. An inappropriate safety distance may occur when there is no lane-changing model specifically for platoon vehicles. On an expressway, an inappropriate distance between vehicles in a platoon even means the dissolution of the platoon. Therefore, this study considered the design of the IPF model, which is composed of the repulsive force field between each vehicle and the gravitational potential field between vehicles in the platoon. On the premise that the platoon does not dissolve, it can complete the lane-changing maneuver of all vehicles in the platoon. Therefore, this study combined the repulsive force field to establish the IPF expression of the interaction between platoon vehicles, as follows:
where
stands for the intra-platoon potential field,
represents the repulsive potential field,
refers to the gravitational potential field, and
is a value related to scale correction.
The repulsive potential field is a typical potential field that was widely applied in the traffic environment. In a previous study [
16], the existing repulsive potential field model was established by considering the spatial position of surrounding vehicles and their motion state. The specific expression of the model is shown in the following equation:
where
is the repulsive potential field,
is the equivalent mass of the ego vehicle
,
refers to the virtual distance to donate the relationship between the ego vehicle’s velocity
and the potential field intensity,
is the acceleration of the ego vehicle, and
is the clockwise angle of any point to the velocity direction of the ego vehicle, and
and
are undetermined parameters that are related to the equivalent mass and the clockwise angle, respectively. Details of the parameters are given in Equations (4)–(6).
The gravitational potential field between vehicles in the platoon was proposed. In order to keep the consistency between the gravitational potential field and repulsive potential field and reduce the number of parameters to be calibrated, the gravitational potential field model was modified based on the repulsive potential field model. The formula for the gravitational potential field model was as follows:
where
refers to the gravitational potential field,
is the virtual distance between the ego vehicle velocity
and the potential field intensity,
represents the clockwise angle of any point to the velocity direction of the ego vehicle,
is the acceleration of the ego vehicle,
refers to an undetermined parameter related to the virtual distance, and
is an undetermined parameter related to the clockwise angle.
is the equivalent mass of the ego vehicle
and is used to characterize the influence of the vehicle’s mass and its motion state on the repulsive potential field [
16]:
where
is the actual mass of the ego vehicle
and
is the velocity of the ego vehicle. In addition, numerical values in the above equation are consistent with our previous research [
16]. The artificial bee colony algorithm (ABC) was used for the specific calibration process:
where
is the transfer coordinate to describe the relationship between the coordinate of the ego vehicle and the steering angle,
is the coordinate of the ego vehicle,
is the velocity of the ego vehicle, and
and
are undetermined parameters that are related to the velocity and the lane width.
where
is the steering angle of the ego vehicle and
is the coordinate of the subject point.
In the CAVs system, the motion state of vehicles can be transmitted and shared in real time. Therefore, the potential field distribution of every vehicle can be obtained according to real-time information. Contours are numerical expressions of the potential energy field and are closed-loop rings, according to which, the vehicle makes decisions. In previous research [
16], we built a lane-changing model based on the repulsive field for a single non-platoon vehicle and calibrated the values of each parameter. As is well known, platoon lane changing occurs in a hybrid environment of single vehicles and a platoon. Meanwhile, the IPF model of platoon lane changing in this study involved the combination of a repulsive potential field and gravitational potential field between single vehicles in the same platoon. Therefore, it was necessary to make the platoon lane change model consistent with the previous individual lane change model in the base parameter values of the field. The parameter values are shown in
Table 1.
On the basis of the parameter values that were calibrated using the consistency with the non-platoon vehicle lane-changing model, the remaining parameter
was calibrated using the optimal platoon space headway. Mature research on the theoretical value of the platoon lane-changing gap is lacking at present. There are essential differences between vehicle lane changing and car following, but the critical state at the beginning and end of lane changing is the car-following state. Therefore, the desired time headway in CAVs car following could be used to calibrate the optimal distance at the beginning of lane changing. However, due to the oblique movement of vehicles in the process of lane changing, it is difficult to maintain a fixed distance, which cannot be calculated using the headway formula. The distance between the two vehicles would fluctuate up and down at the optimal distance and form a distance interval. Therefore, this optimal distance cannot be the critical minimum collision distance for car following since this would easily allow for collisions in the lane-changing process. In addition, cooperative adaptive cruise control (CACC) is a low-level CAVs system. Some research was done in this regard. Liu [
26] suggested that the desired time headway of a car following in a CACC strings flow was 1.4 s with 0.2 s as the standard deviation. Meanwhile, Nowakowski [
27] claimed that CACC strings can operate with 0.6 s as the minimum inter-vehicle time gap. According to the definition of the optimal distance in this study, 1.4 s was selected as the desired time headway to calibrate the optimal distance at the beginning of the lane-changing process, as shown in Equation (7). It is also worth saying that 1.4 s is just the desired headway time under a low-level CAVs system. With the improvement of the CAVs system level, a closer headway should be adopted.
where
is the optimal distance at the beginning of lane changing,
is the velocity of the ego vehicle, and
is the desired time headway, which was set to 1.4 s.
In the IPF, there is a minimum ring of the field contour. When the minimum ring of the ego vehicle is tangent to that of the front one, the distance between the two vehicles is the optimal distance in the physical sense. Therefore, this study defined the optimal distance as Equation (8):
where
is the optimal distance,
is the distance from the minimum point in the driving direction to the centroid of the ego vehicle, and
is the distance between the minimum point in the negative driving direction of the front vehicle and its centroid. They are derived from the IPF, whose derivative is set to zero. The formulas were as follows:
was calibrated using simultaneous equations, namely, Equations (7)–(9). The results are shown in Equation (10):
The model can provide dynamic feedback of the gravitational potential field distribution of the platoon vehicles in different motion states. The risk maps are generated, as shown in
Figure 3. The green contour represents a horizontal curve that is formed by projecting points with the same potential field into a plane. The color from cyan to violet indicates the intensity of the potential field. When the color at a certain point is closer to purple, it indicates the greater value of the gravitational potential field, that is, the greater the gravitational penalty. In contrast, the closer the color to cyan, the smaller the gravitational penalty. As shown in
Figure 3a, when the vehicle was stationary, i.e., when its velocity, acceleration, and steering angle were all zero, independent of whether vehicles in the same platoon were close to the ego vehicles at any position, there was a similar variation trend in the gravitational potential field; therefore, the gravitational potential field around the static vehicle presented a circular shape. As shown in
Figure 3b,c, when the self-driving vehicle moved at a constant speed, there was a larger distance between vehicles moving at high speeds. The scope of the gravitational potential field gradually expanded and the strength of the gravitational potential field weakened at the same position around the ego vehicle. Thus, the form of the gravitational potential field was an ellipse that was compressed along the vertical axis (perpendicular to the direction of motion). When the ego vehicle was accelerating, the gravitational potential field strength exerted by the vehicle on the following vehicle was greater than that of the uniform motion, as shown in
Figure 3d,e. With the increase in acceleration, the gradient of the gravitational potential field to the rear vehicle gradually increased. Similarly, if the vehicle was decelerating, the gradient of the gravitational potential field to the rear vehicle increased with the deceleration, which is shown in
Figure 3g,h. When the ego vehicle was changing lanes, there was a steering angle, where the effect of the vehicle on the rear vehicle was different from the changing trend of the straight-driving vehicle. Therefore, the gravitational potential field was designed to be offset along the direction of the steering angle, as shown in
Figure 3f,i.
6. Conclusions
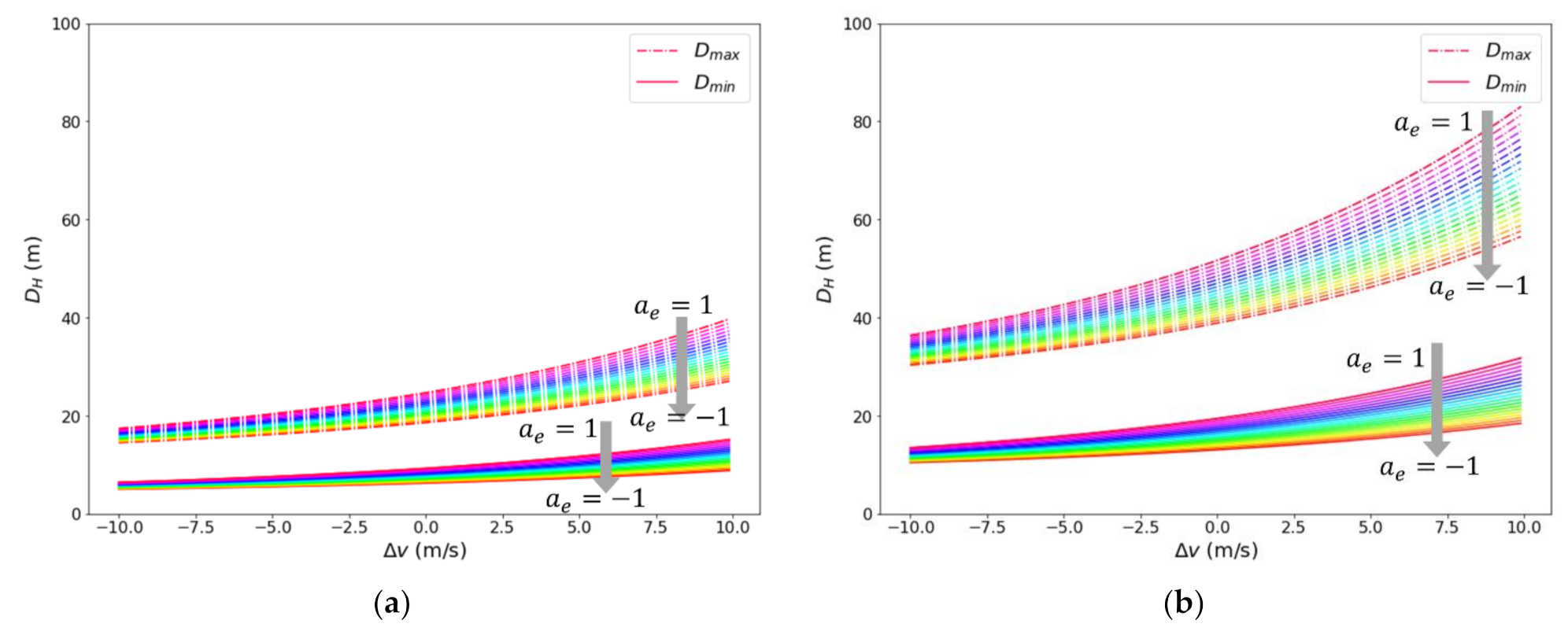
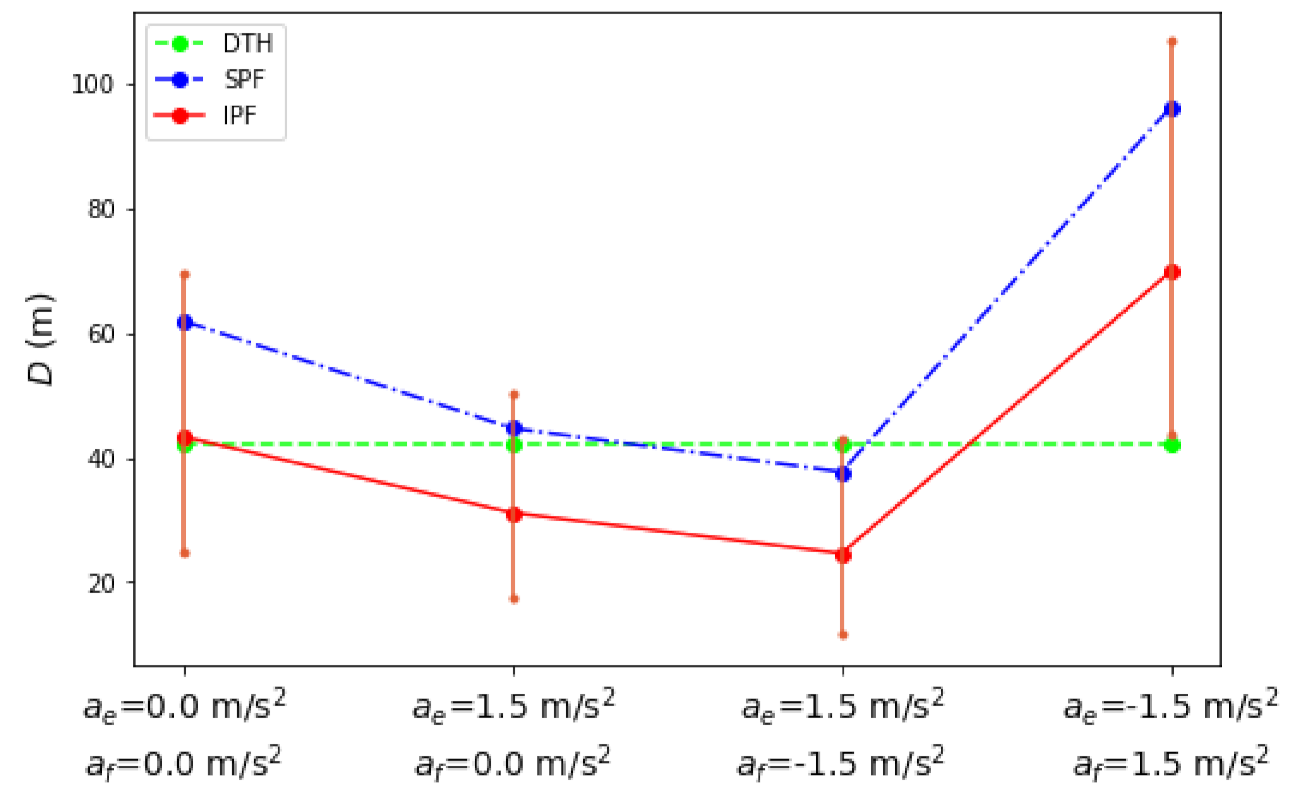
This study focused on the feasible gap in platoon lane-changing maneuvers in CAVs systems. First, conflicts that may happen in scenes of platoon lane changing were listed and the typical rear-end collision and side crash were selected as core scenarios for this study. Second, a gravitational potential field brought by the traction inside the platoon was proposed for the platoon vehicles. Combined with the repulsive potential field, the IPF method was established, which represents the risk distribution around the platoon vehicle under its current moving state. Third, a safety lane-changing process for the platoon was designed and a dynamic gap in the process was proposed, which was composed of intra-platoon and inter-platoon distances. The distance between non-platoon vehicles was studied in many pieces of research, but it is necessary to also study the gap between intra-platoon vehicles. On the basis of the IPF, this study deeply analyzed the critical distances between vehicles in different conflict scenarios, namely, rear-end collisions and side crashes. It was found that the critical distance in the platoon was an interval with an upper bound and a lower bound, which was quite different from the results in previous studies about non-platoons. Therefore, this study proposed a critical lane-changing distance model for platoon vehicles under each of the two collision scenarios. Finally, experiments were carried out, namely, numerical experiments of critical distances between intra-platoon vehicles and that of the dynamic gap in the entire platoon lane-changing process, which showed that the proposed model effectively represented the relationship between the critical distances and the motion state. Compared with other models, it was verified that the critical distance model proposed ensured the safety of a lane-changing maneuver and that it could maintain a shorter gap compared with non-platoon vehicle lane changing.
The method can be applied further in many scenarios, including up and down ramps, avoiding construction areas ahead, and even the lane-changing behavior strategy of a self-organizing platoon. Furthermore, future work intends to do further research on trajectory planning and stability control in the platoon lane-changing process under the CAVs environment.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}