
Differential Transform Method as an Effective Tool for Investigating Fractional Dynamical Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Fractional Derivative
2.2. The Rössler System of Integer and Fractional Orders
2.3. Differential Transform Method
2.4. Multi-Step DTM
2.5. Differential Transform of the Rössler System
3. Results
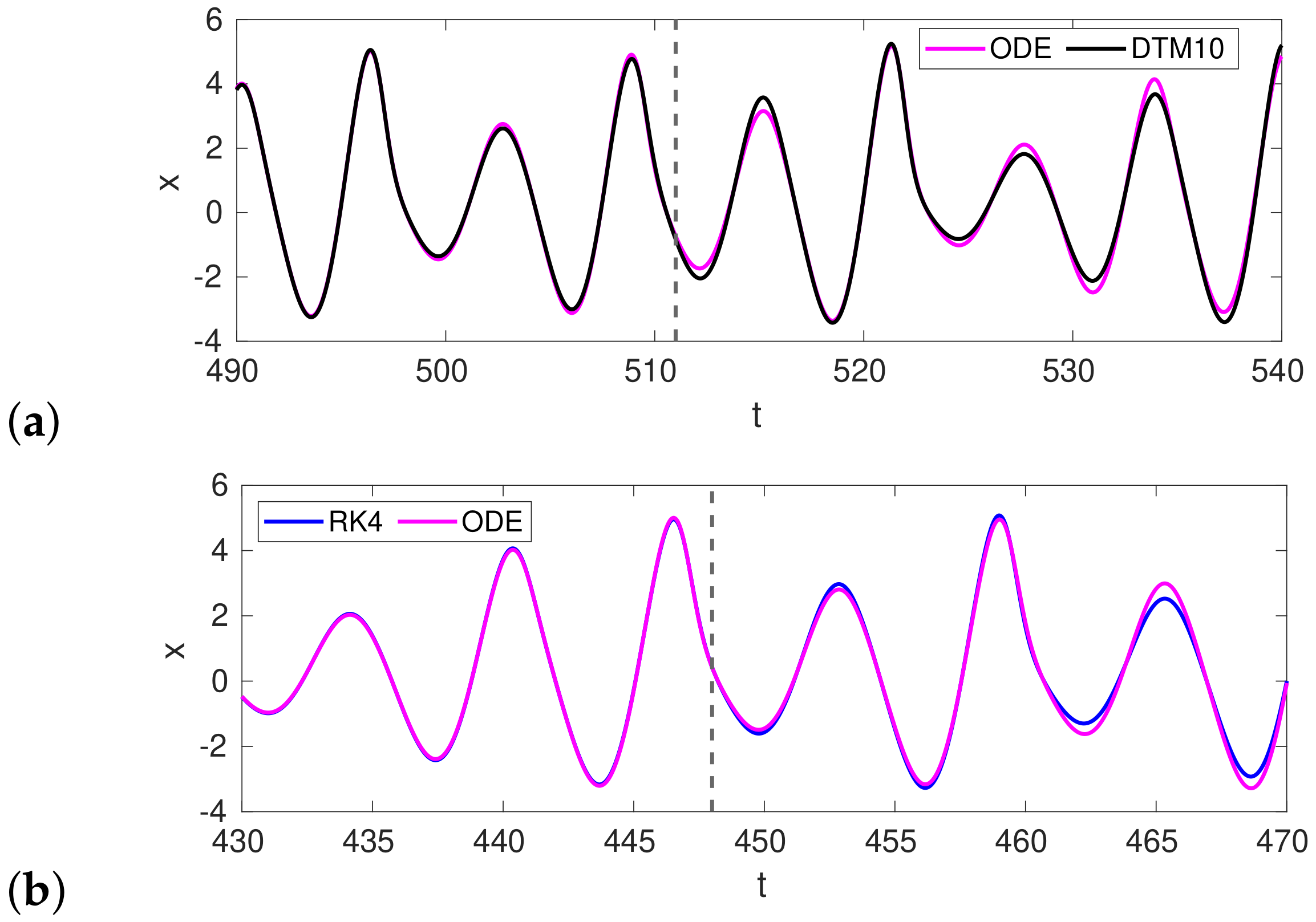
3.1. Integration of the Rössler System: DTM vs. Other Methods
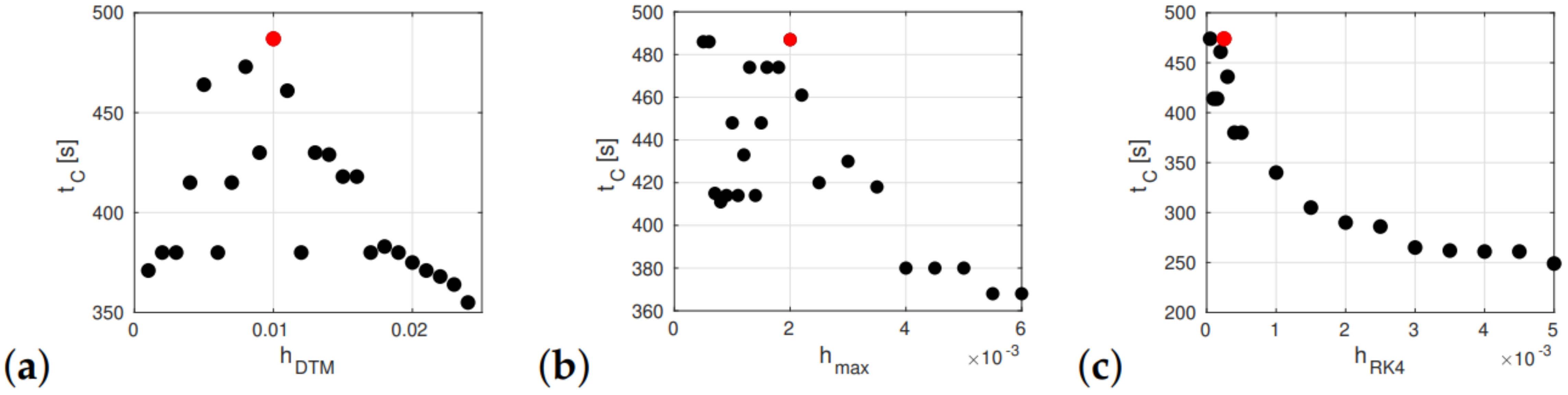
3.2. Finding the Optimal Order of DTM
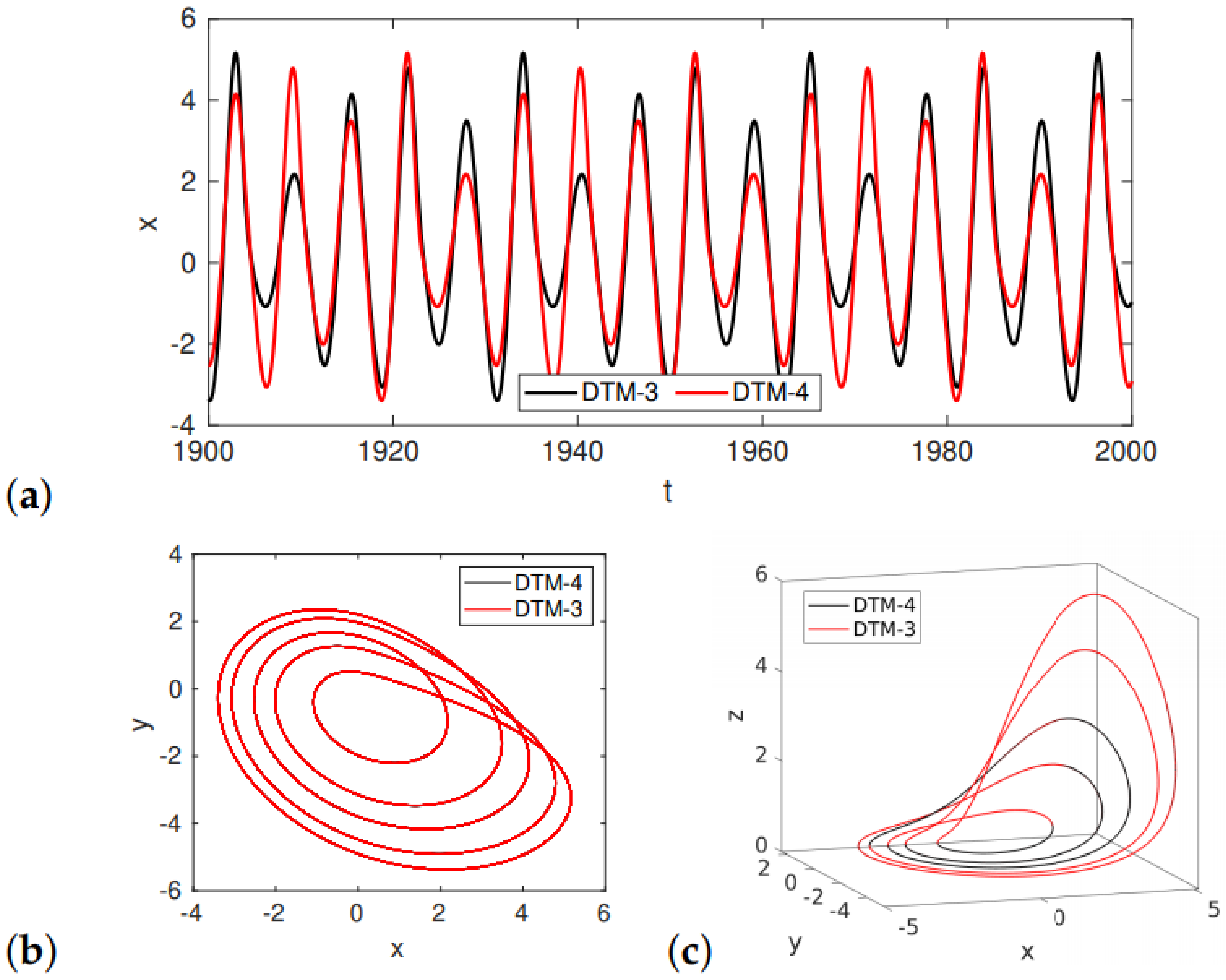
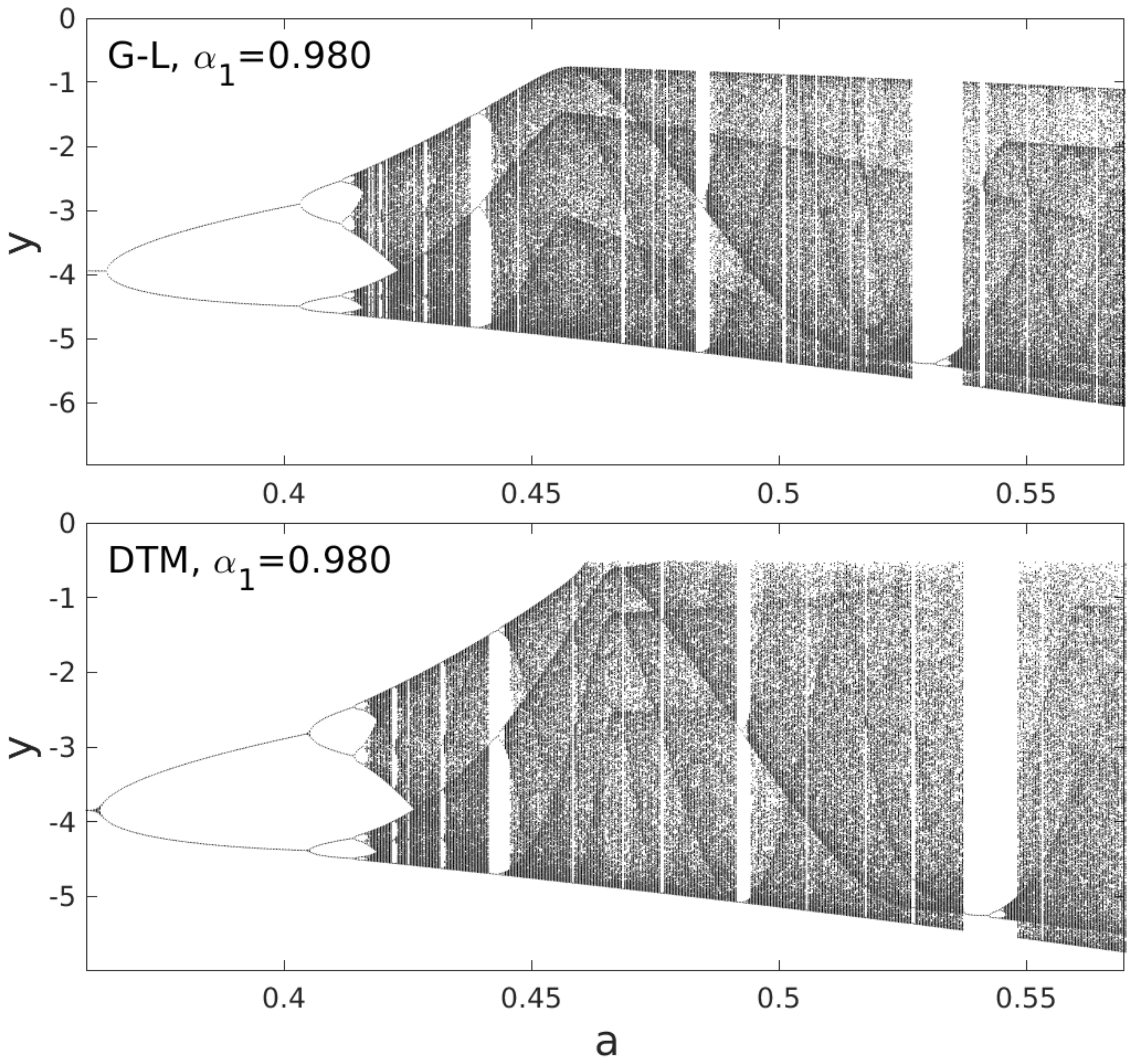
3.3. Integration of the Rössler System by DTM
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific Publishing Company: Singapore, 2000. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematical Studies; Elsevier (North-Holland) Science Publishers: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Jafari, H.; Daftardar-Cejji, V. Solving a system of nonlinear fractional differential equations using Adomian decomposition. J. Comput. Appl. Math. 2006, 196, 640–651. [Google Scholar] [CrossRef]
- He, J.-H. An elementary introduction to the homotopy perturbation method. Comput. Math. Appl. 2009, 57, 410–412. [Google Scholar] [CrossRef]
- Zayeranouri, M.; Matzavinos, A. Fractional Adams-Bashfort/Moultn methods: An application to the fractional Keller-Segel chemotaxis system. J. Comput. Phys. 2016, 317, 1–14. [Google Scholar] [CrossRef]
- Zhou, J.K. Differential Transformation and Its Applications for Electrical Circuits; Huazhong Univ. Press: Wuhan, China, 1986. [Google Scholar]
- Chen, C.K.; Ho, S.H. Solving Partial Differential Equations by Two-Dimensional Differential Transform Method. Appl. Math. Comput. 1999, 106, 171–179. [Google Scholar]
- Ertúrk, V.S.; Odibat, Z.M.; Momani, S. The Multi-Step Differential Transform Method and Its Application to Determine the Solutions of Non-Linear Oscillators. Adv. Appl. Math. Mech. 2012, 4, 428–438. [Google Scholar] [CrossRef]
- Mirzaee, F. Differential Transform Method for Solving Linear and Nonlinear Systems of Ordinary Differential Equations. Appl. Math. Sci. 2011, 70, 3465–3472. [Google Scholar]
- Odibat, Z. Generalized differential transform methodfor solving Volterra integral equation with separable kernels. Math. Comput. Model. 2008, 48, 1144–1146. [Google Scholar] [CrossRef]
- Arikoglu, A.; Ozkol, I. Solution of fractional differential Equations by using differential transform method. Chaos Solitons Fractals 2007, 34, 1473–1481. [Google Scholar] [CrossRef]
- Cong, N.D.; Tuan, H.T. Generation of Nonlocal Fractional Dynamical Systems by Fractional Differential Equations. J. Integral. Equat. Appl. 2017, 4, 585–607. [Google Scholar] [CrossRef]
- Kuznetsov, N.V.; Makaev, T.N.; Kuznetsov, O.A.; Kudryashova, E.V. The Lorenz system: Hidden boundary of practical stability and the Lyapunov dimension. Nonlinear Dyn. 2020, 102, 713–732. [Google Scholar] [CrossRef]
- Leonov, G.A.; Kuznetsov, N.V.; Makaev, T.N. Homoclinic orbits, and self-excited and hidden attractors in a Lorenz-like system describing convective fluid motion. Eur. Phys. L. Spec. Top. 2015, 224, 1421–1458. [Google Scholar] [CrossRef]
- Boichenko, V.A.; Leonov, G.A.; Reitmann, V. Dimension Theory for Ordinary Differential Equations; Teubner: Stuttgart, Germany, 2005. [Google Scholar]
- Ladyzhenskaya, O.A. Attractors for Semi-Groups and Evolution Equations; Cambridge University Press: Cambridge, UK, 1991. [Google Scholar]
- Doan, T.S.; Kloeden, P.E. Semi-Dynamical System Generated by Autonomous Caputo Fractional Differential Equations. Vietnam J. Math. 2021. [Google Scholar] [CrossRef]
- Caputo, M. Linear models of dissipation whose Q is almost frequency independent—II. J. R. Austral. Soc. 1967, 13, 529–539. [Google Scholar] [CrossRef]
- Rössler, O. An equation of continuous chaos. Phys. Lett. 1976, 5, 397–398. [Google Scholar] [CrossRef]
- Barrio, R.; Blesa, F.; Dena, A.; Serrano, S. Qualitative and numerical analysis of the Rössler model: Bifurcations of equilibria. Comput. Math. Appl. 2011, 62, 4140–4150. [Google Scholar] [CrossRef][Green Version]
- Sprot, J.C.; Li, C. Asymmetric Bistability in the Rössler system. Acta Phys. Polonica B 2011, 48, 97–107. [Google Scholar] [CrossRef]
- Cafagna, D.; Grassi, G. Hyperchaos in the Fractional-order Rössler System with Lowest-order. Int. J. Bifurc. Chaos 2009, 1, 339–349. [Google Scholar] [CrossRef]
- Wang, H.; He, S.; Sun, K. Complex Dynamics of the Fractional-Order Rössler System and Its Tracking Synchronization Control. Complexity 2016. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, S.; Li, H.; Zhu, H. Chaos in a fractional-order Rössler system. Chaos Solitons Fractals 2009, 42, 1684–1691. [Google Scholar] [CrossRef]
- Freihat, A.; Momani, S. Adaptation of Differential Transform Method for the Numeric-Analytic Solution of Fractional-order Rössler Chaotic and Hyperchaotic Systems. In Abstract and Applied Analysis; Hindawi: London, UK, 2012. [Google Scholar]
- Idrees, M.; Mabood, F.; Ali, S.; Zaman, G. Exact Solution of Stiff System by Differential Transform Method. Appl. Math. 2013, 4, 440–444. [Google Scholar] [CrossRef]
- Odibat, Z.; Momani, S.; Ertúrk, V.S. Generalized differential transform method: Application to differential equations of fractional order. Appl. Math. Comput. 2008, 197, 467–477. [Google Scholar] [CrossRef]
- Alomari, A.K. A new analytic solution for fractional chaotic dynamical system using the differential transform method. Comput. Math. Appl. 2011, 61, 2528–2534. [Google Scholar] [CrossRef]
- Odibat, Z.; Bertelle, C.; Aziz-Alaoui, M.A.; Duchamp, G. A multi-step differential transform method and application to non-chaotic and chaotic systems. Comput. Math. Appl. 2010, 59, 1462–1472. [Google Scholar] [CrossRef]
- Keevil, J. ODE4 Gives More Accurate Results than ODE45, ODE23, ODE23s. MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/59044-ode4-gives-more-accurate-results-than-ode45-ode23-ode23s (accessed on 20 July 2021).






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rysak, A.; Gregorczyk, M. Differential Transform Method as an Effective Tool for Investigating Fractional Dynamical Systems. Appl. Sci. 2021, 11, 6955. https://doi.org/10.3390/app11156955
Rysak A, Gregorczyk M. Differential Transform Method as an Effective Tool for Investigating Fractional Dynamical Systems. Applied Sciences. 2021; 11(15):6955. https://doi.org/10.3390/app11156955
Chicago/Turabian StyleRysak, Andrzej, and Magdalena Gregorczyk. 2021. "Differential Transform Method as an Effective Tool for Investigating Fractional Dynamical Systems" Applied Sciences 11, no. 15: 6955. https://doi.org/10.3390/app11156955
APA StyleRysak, A., & Gregorczyk, M. (2021). Differential Transform Method as an Effective Tool for Investigating Fractional Dynamical Systems. Applied Sciences, 11(15), 6955. https://doi.org/10.3390/app11156955