1. Introduction
Motivation: The motivation behind this study is to plan a path for a network of unmanned aerial vehicles (UAVs). It means designing a navigable path from the primary location to the destination it produces the most optimal outcome under specific constraints [
1]. Many diverse research areas like engineering [
2], science [
3], wireless and cloud infrastructure [
4,
5,
6], and even economics [
7] encounter optimization problems. To resolve these optimization problems, researchers have offered numerous strategies [
8,
9,
10]. As the problem size expands, these methods require more computations [
11]. Hence, this paper aims to cover gaps in the research literature relating to optimization algorithms that not only require less memory and computational resources but also produce improved outcomes.
Related Works: A cluster is a set of similar objects and cluster analysis is used in a variety of different applications [
12]. However, during the last few years, scientists combined different cluster-based strategies to provide more precise and robust results compared to their traditional counterparts [
13,
14,
15]. Max-Min Ant Colony Optimization (MMACO) is one such optimization algorithm, which is an improvement over the classic Ant Colony Optimization (ACO) [
16]. ACO a meta-heuristic algorithm that is used to solve complex optimization difficulties. As the name of the algorithm implies, a group of artificial ants searches for the best solutions through multiple iterations.
However, in some instances, ACO has a slow convergence rate and falls into the local optimum. To avoid the aforementioned issues, researchers introduced MMACO, a strategy that limits the pheromone on each trail to maximize the chances of getting an optimal result. MMACO differs from ACO in many significant aspects. For instance, MMACO only allows the best ants to add pheromone to the pheromone trail.
Multi-Agent System (MAS) contains multiple agents, and every agent determines its state using the state of its neighbor. MAS has numerous applications including in the fields of autonomous vehicles [
17] and bio-inspired systems [
18]. In most cases of MAS, an outside entity has to drive the agents toward the target. The usual strategy is to designate a few agents as leaders and let the rest of the agents follow the leader. The leader agents function as external entities that can affect the follower states. We can efficiently control a big network of UAVs by selecting fewer leader agents than the followers, which demonstrates the scalability and efficiency of the leader-follower method [
19,
20].
Vicsek et al. [
21] introduced a comparable, simpler multi-agent model later known as the Vicsek model. It consists of discrete-time “N” autonomous agents having constant absolute velocity. These agents follow the direction of the motion of their neighbors also conjuction with random noises. Vicsek et al. [
21] discovered some exciting results through simulations: all agents will follow the same direction when their density is large and the smaller noise. This phenomenon is called synchronization.
Researchers in the field of control theory have tried to rigorously analyze the concept of synchronization. Jadbabaie et al. [
22] examined the heading angles linearly and presented a series of pointless neighbor grids using the locations of the specific agents. It demonstrated that to ensure the synchronization of the system, the graphs have to be mutually linked in a specific identical manner. Afterward, another study [
23] used the headings discretely and examined if the same linear system will synchronize. It demonstrated that we could also achieve synchronization if we connect the union of neighbor graphs infinite times.
Contributions: The main offerings of this study are:
A multi-colonies-based hierarchical structure is designed which divides the UAVs into three distinct and non-overlapping colonies. In each colony, UAVs form hierarchies with one UAV selected as the colony leader.
This study uses MMACO for the formation of route of a network of UAVs. MMACO limits the pheromone on each trail to ensure early convergence of ACO.
MMACO finds the best ant of each colony. Then, MAS designates the best ant of each colony as the leader and the rest of the ants as agents.
All colonies’ leaders perform the synchronization and coordination to cooperatively share the mission requirement among all the colonies, and the followers follow their direct leader to achieve the inner group coordination as well the overall mission requirement i.e., path planning of a network.
Organization: This research structured as follows:
Section 2 describes the problem and mission scenario.
Section 3 sheds some light on the solution framework.
Section 4 deals with the model of the proposed system and describes in detail the ACO, MMACO, and Vicsek MAS components of our proposed strategy.
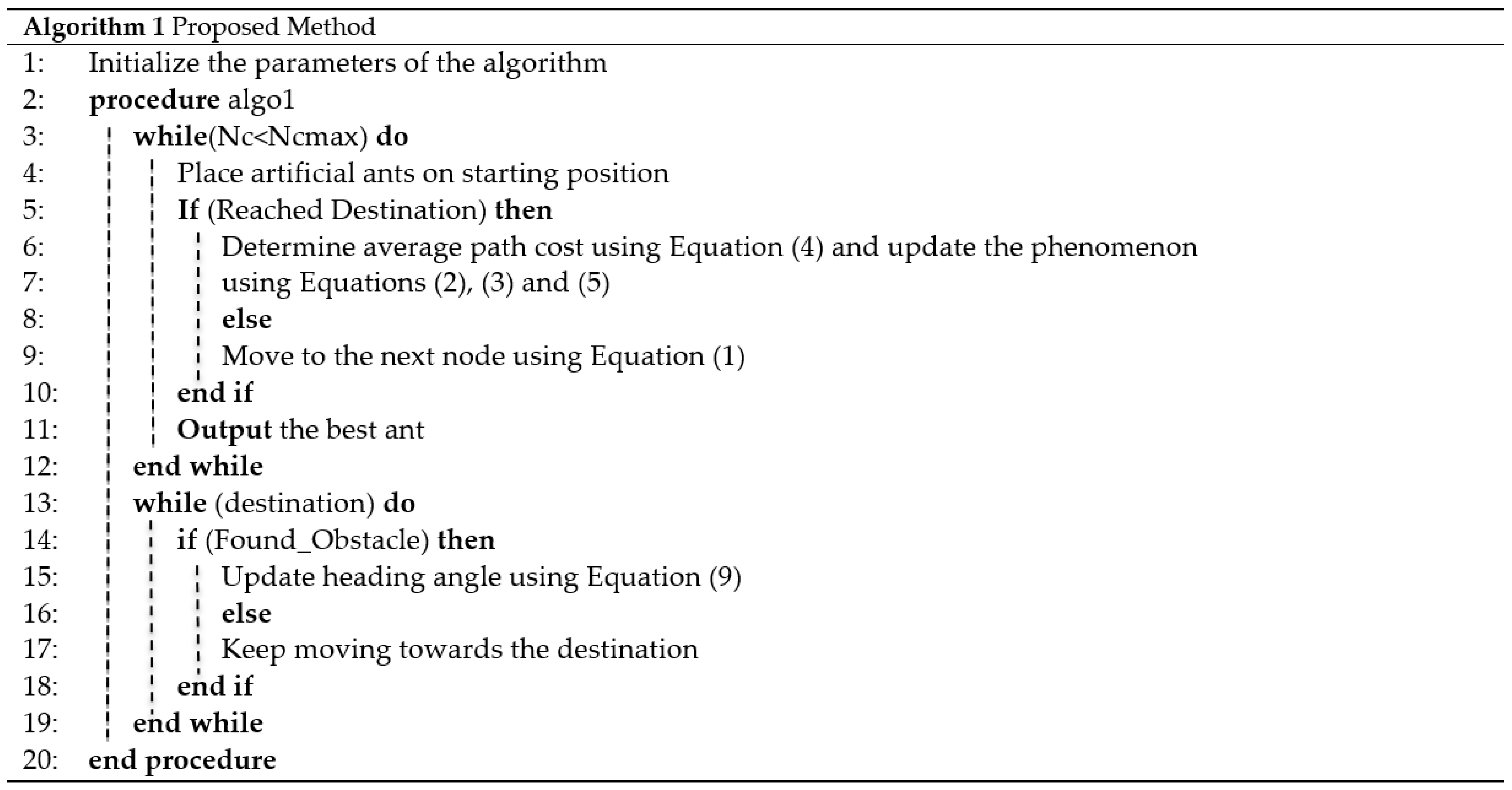
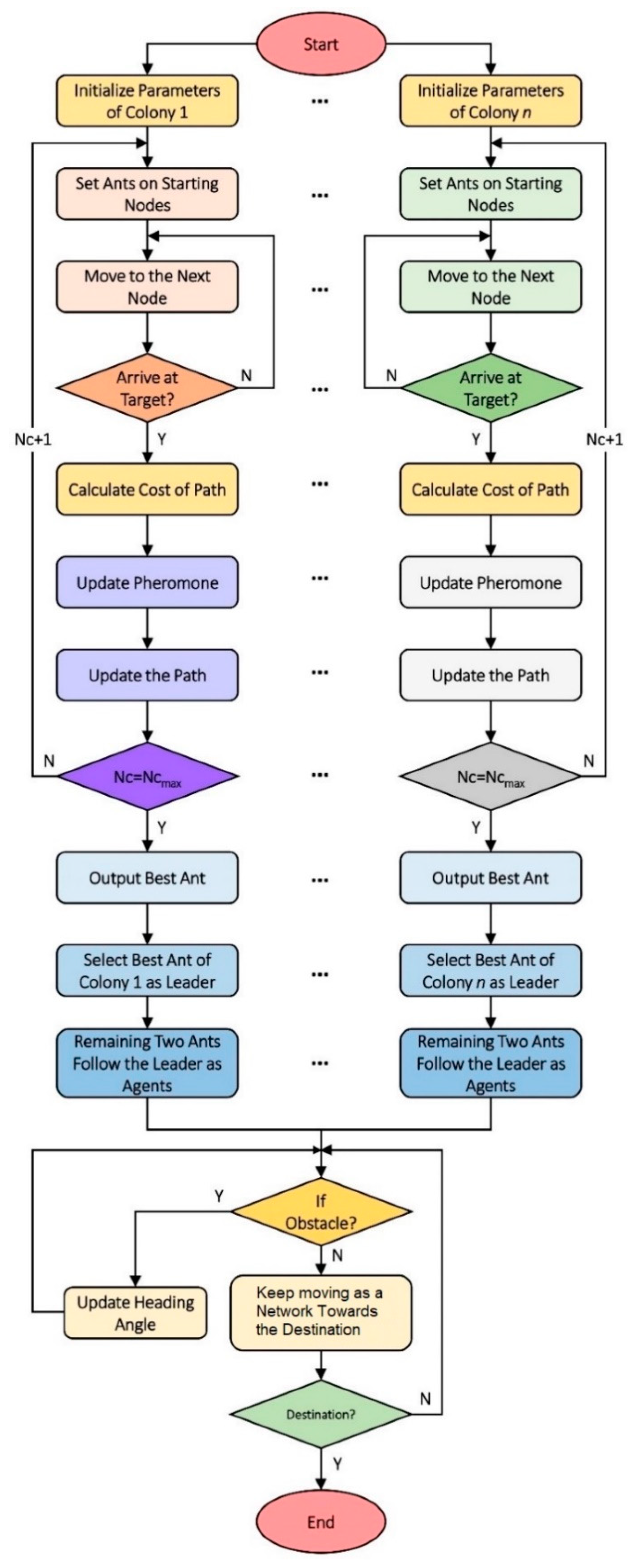
Section 5 presents the flowchart and the algorithm.
Section 6 discusses the simulation results. Lastly,
Section 7 concludes the whole article.
2. Problem Formulations
This section describes the problem that this paper is trying to solve. Firstly, in this research, we simulate the scenario by parallel implementing the design hierarchy with the non-dominated sorting genetic algorithm II (NSGA-II) to check the validity of our scheme. Hereinafter, this research consists of two mission situations, inorder to validate the proposed strategy, i.e., (i) validate the proposed algorithm in a rough environment with hilly peaks. (ii) Crooscheck the execution of the designed model in an environment with tornadoes.
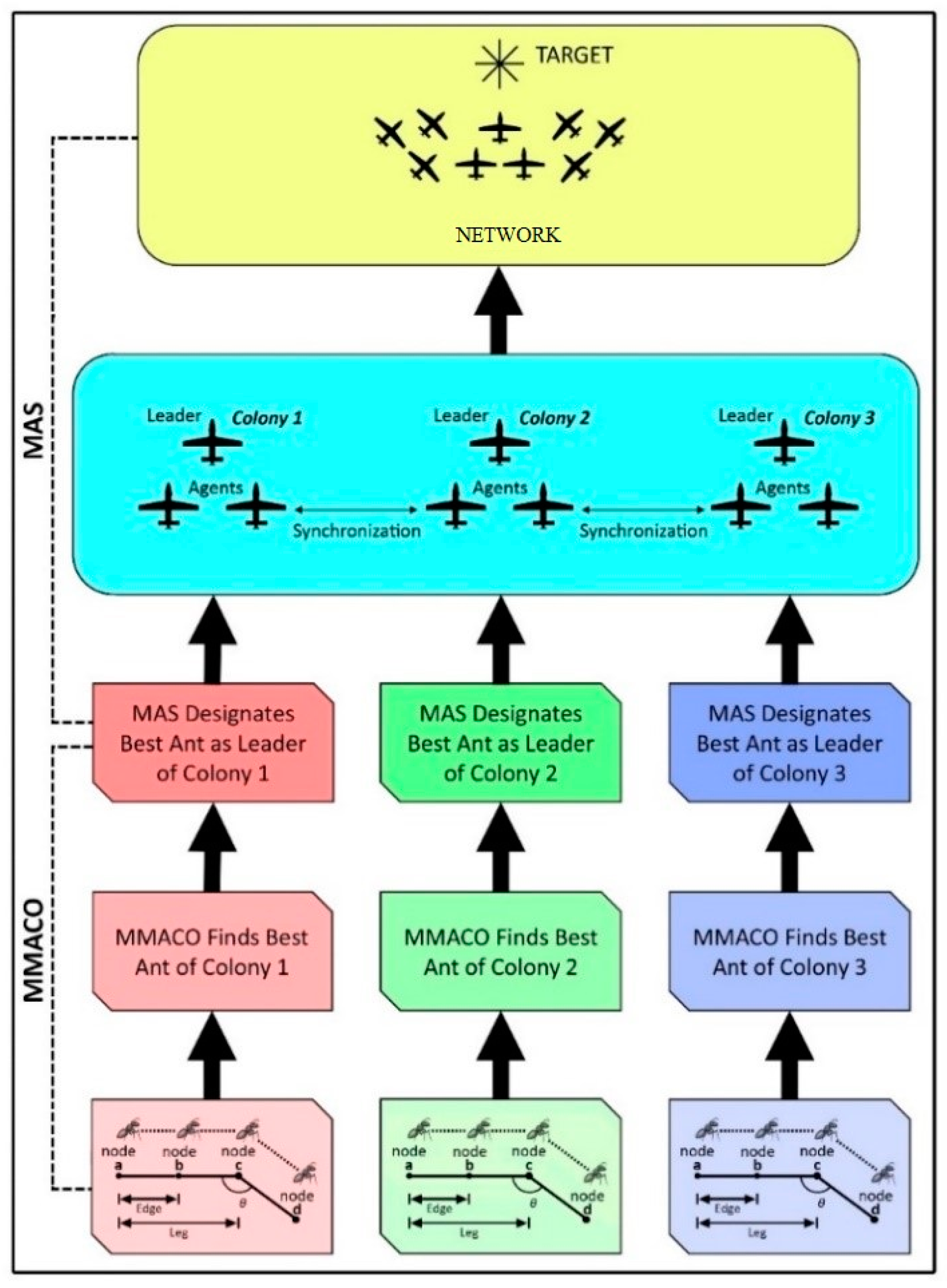
Figure 1 shows the mission scenario in which three colonies have to reach their destination through a dynamic territory. To achieve our objective, we have divided our mission into two main phases. In the first phase, MMACO finds the most optimal route for the leader of each colony. Then, in the second phase, the rest of the two UAVs follow their leader as agents toward the destination using Vicsek MAS. Keep in mind that the three colonies will come closer and closer towards the end and act as one single network. Additionally, there are some obstacles such as mountain peaks and tornados in the mission environment. Due to the aforementioned threats in the area, all UAVs need to coordinate and synchronize to avoid any collision.
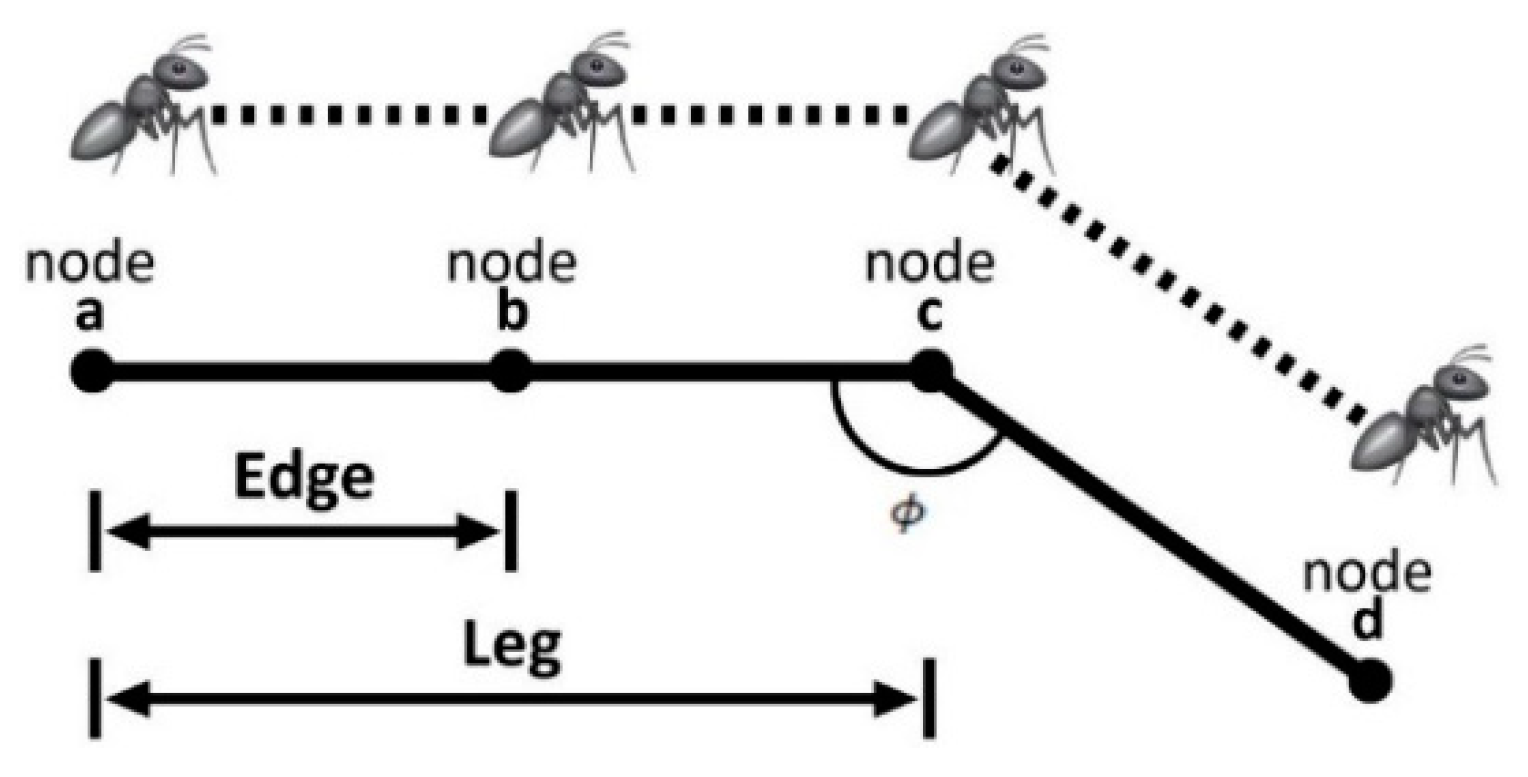
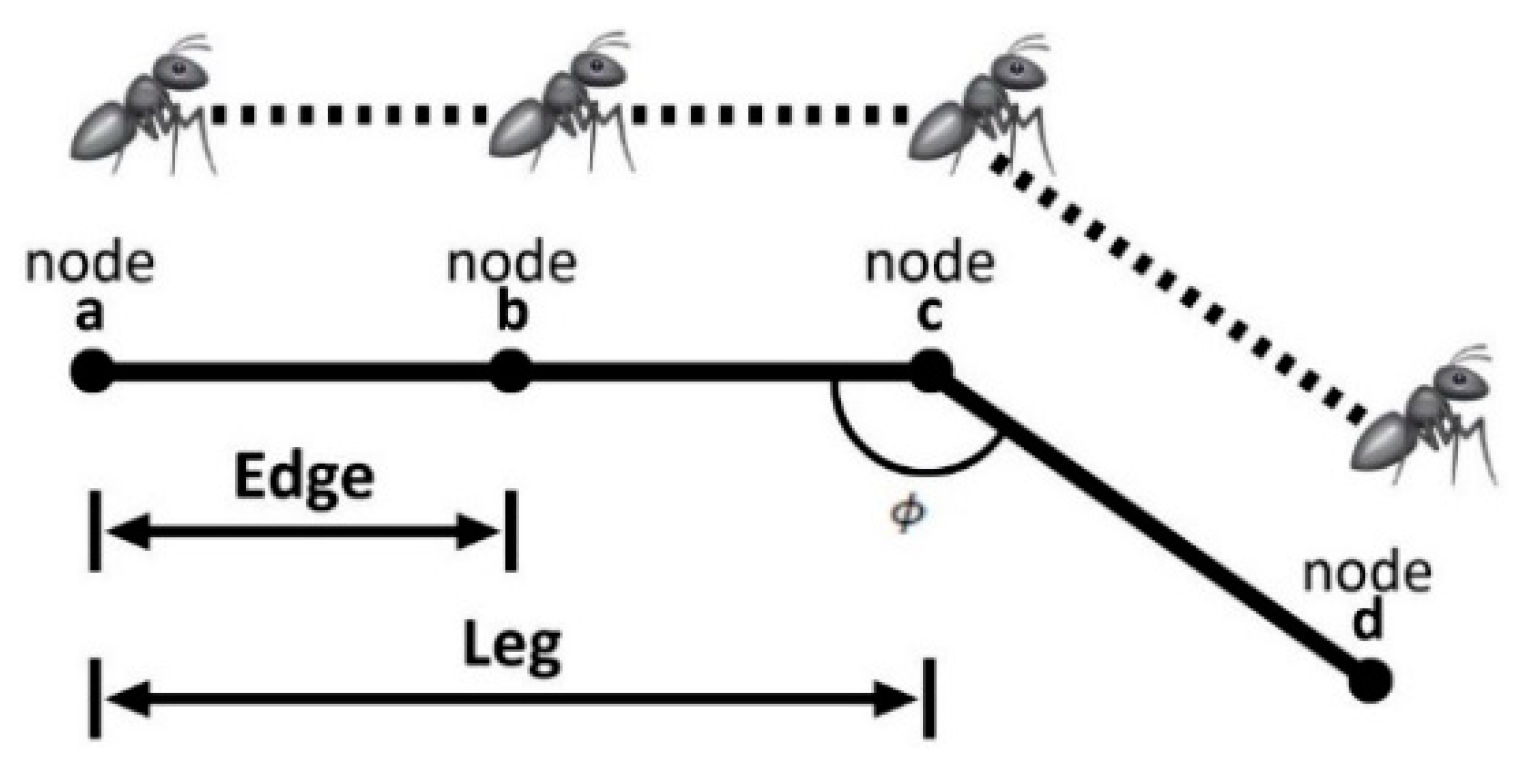
A regular mesh is used as the topology of the network which means that all the edges are of the same length. The hills and tornadoes are modeled as missing nodes. In
Figure 2 there is an association in legs, edges and nodes. In order to understand the concept of path planning, it is essential to first understand the concept of nodes, edges, and legs. The nodes are intermediate points plotted by the algorithm between starting position and the final position. The UAV only moves from one node to another. The algorithm plots the nodes for the whole path during one iteration. As the air space is 3D, we split it into three 2D planes, i.e.,
xy,
yz, and
zx, to make the computations simpler [
24].
Every time a UAV is set to hit something, the algorithm alters its path and generates a leg. After every turn, a new leg is generated. It is clear from
Figure 2 that an edge connects two nodes. For example, edge (a, b) is the length from node a to b. There are 4 nodes, 3 edges, and 2 legs in
Figure 2.
ϕ is the angle between the legs. The complete consists of multiple legs.
3. Solution Frameworks
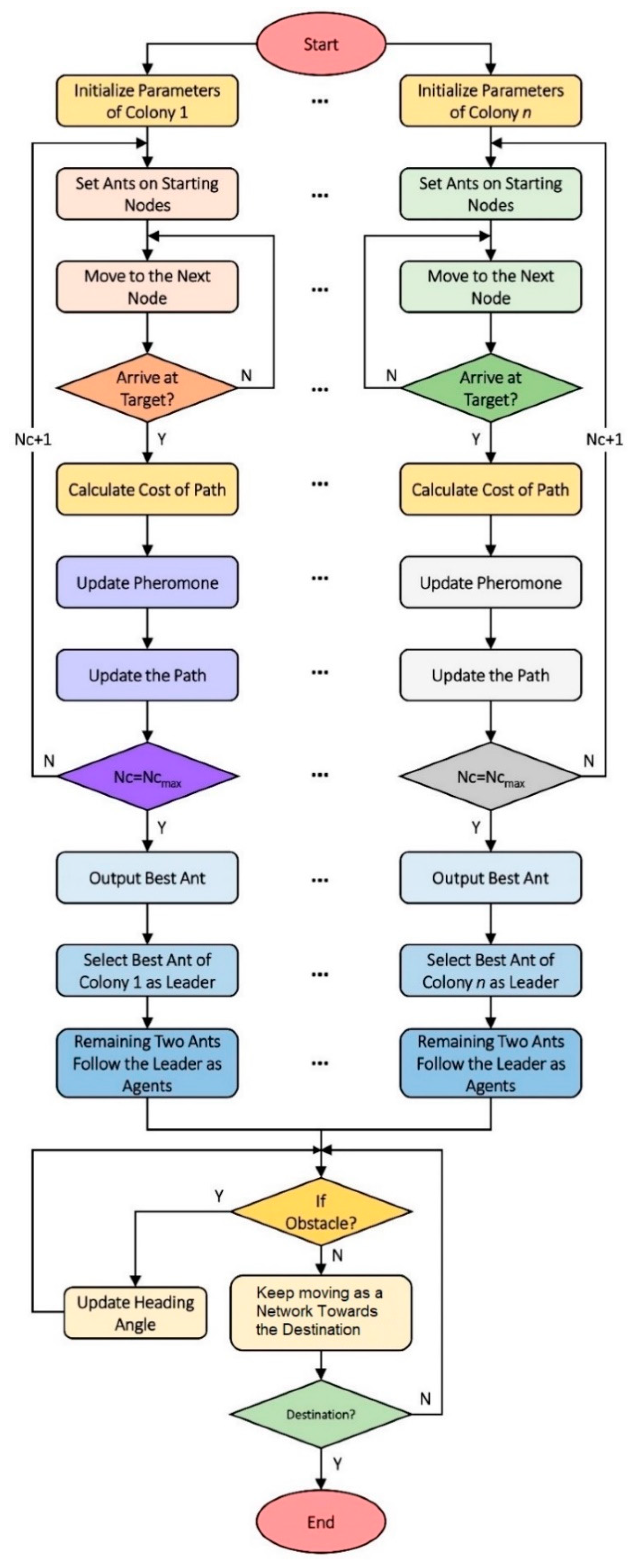
This section develops a solution framework to distribute the main objective into smaller and simpler tasks to achieve our mission relatively quickly.
Figure 3 illustrates the framework in detail.
It is clear from
Figure 3 that the first task of our system is to plan the path for the leader. Here, we are using MMACO to find the most optimal route while also avoiding obstacles. The concept of path planning is again illustrated here in terms of nodes, edges, and legs. MMACO plots the nodes and the UAV moves from node to node until it encounters an obstacle. Then, it turns and creates a leg until it reaches its destination. MMACO cannot find the best path on the first try so this process is repeated a predetermined number of times. The number of iterations is chosen based on a good estimate of when the algorithm will find the best path.
After MMACO finds the best ant of a colony, the MAS designates it as the leader of that colony and the rest of the ants as its agents. Then, the agents of each colony start to follow their leader. The colonies also synchronize and coordinate with each other to avoid a collision. The colonies get closer and closer as they move towards the destination until they form a network.
The algorithm detects the tornadoes in real-time as a dynamic threat because they are modeled as missing nodes. So, whenever the Vicsek MAS detects a missing node as its neighbor, it changes direction.
4. Model of the Proposed System
In this section of the research article, we design a novel scheme using MMACO to plan the routes of UAVs. Moreover, the proposed scheme will also use Vicsek MAS to coordinate and synchronize all the colonies.
4.1. Ant Colony Optimization
The ant colony optimization (ACO) imitates the actual ants foraging for food using pheromones left over by previous ants [
25]. The route traveled most by the ants has the most pheromones, and hence it helps the next ant in selecting the shortest path [
26].
The aircraft is flying from the takeoff to the destination using the edges [
27]. The following supposition helps select the next edge of the path.
Supposition 1: Assume that the
kth ant is located at a node on time
t, the transit probability is given as;
where
is transit probability of the
kth ant from node
a to node
b,
is the pheromone on the edge (
a,
),
is the feasibility of transition from node
a to node
b,
is the set of neighboring nodes of
a,
is the parameter to control the influence of
, and
is the parameter to control the influence of
.
When the algorithm starts, the initial pheromone rate changes with respect to the edges. Afterward, every ant that produced the outcome [
28] starts the next cycle of the algorithm and resets the pheromone rate. The pheromone
on the edge (
is;
where
is the evaporation rate of pheromone (
,
is the total number of ants, and
is the rate of pheromone on the edge
.
can be further defined as
where,
is the constant, and
is the length of the path constructed by the
kth ant.
4.2. Max-Min ACO
To ensure early convergence of the ACO, we need to modify the classic algorithm. In this regard, MMACO offers some promising results by limiting the pheromones on each trail [
29]. To discuss MMACO, we have to first study the cost of the path. The next formula presents the average path cost
;
Remark 1. The kth ant will only update the pheromone if the path cost of the kth ant in the tth iteration fulfill.
After each iteration, the algorithm will update the path using Equation (3). MMACO obtains the most optimal and least optimal path after every iteration [
30]. It discards the least optimal path to increase the chances of finding the globally best path. Therefore, Equation (3) can be updated as,
In Equation (5), is the best path and is the least optimal path of the current iteration. MMACO limits the amount of pheromone by restricting it to predetermined levels. This restriction helps accelerate the convergence and avoids falling into stagnation.
Definition 1. MMACO restricts the pheromone trails to a predetermined maximum and minimum value represented asand. Therefore, by refining the pheromone trails after every cycle, we use this formula to update the pheromone,
4.3. Vicsek MAS
The Vicsek MAS consists of
n autonomous agents moving in the plane with the same absolute velocity [
31]. The model updates the heading of every agent with respect to the state of its neighbor. The neighbors of an agent
I (1 ≤
I ≤
n) at time
t are those which lie within a circle of radius
r (
r > 0) centered at the current position of agent
i. We represent the neighbors of the agent
i at time
t as
Ni(t),
whereas
can be found using the Pythagorean theorem
While, (
xi(t),
yi(t)) are the coordinates of the agent at time
t. Agent
i and agent
j are neighbors to each other. Every agent in the system has the same absolute velocity
v (
v > 0).
where
θi(t) represents the heading angle of agent
i at time
t. The MAS updates the heading angle using the following equation,
Equation (9) is used to detect obstacles by checking their neighbors. If there is a missing node in the neighbor (meaning an obstacle), then it will change the heading angle to avoid collision with the obstacle.
The Vicsek MAS model is a dynamic system, and we can use elementary graph theory to analyze this model. Keep in mind that the neighbors of each agent do not remain the same. To define the coordination of agents, Jadbabaie et al. [
22] made use of an undirected graph sequence
}. Whereas,
= {1, 2, ···,
N} is the set that contains all agents, and
is the edge set that changes with time. If any two vertexes of a graph are joined together, that graph would be considered connected.
We can simplify Equation (9) as,
We can also simplify Equation (10) by using a matrix,
whereas,
,
is the weighted average matrix of the graph
:
To study the synchronization of the Vicsek MAS, Jadbabaie et al. [
22] examined the linearized model of Equation (9), which is:
where,
is the number of elements in
. Similarly, we can replace Equation (11) by,
where,
, and the entries of the matrix
are,
4.4. Synchronization and Connectivity
In order to further examine the synchronization of the Vicsek MAS as well as the connectivity of the related neighbor graphs, we have to first define what synchronization is.
Definition 2. The aforementioned Vicsek MAS model achieves synchronization if the headings of every agent meet the following condition,
whereas, θ may vary according to the initial statesand the model constraints v, and r. The subsequent two propositions will set up the synchronization for the Vicsek MAS and its linear form under the parameters of the initial states and the system constraints r, v, and N.
Proposition 1. For the Vicsek MAS model in Equations (8) and (9), let, and the initial neighbor} is connected. So, the model will achieve synchronization if it meets the following condition,where N is the number of agents, and Proposition 2. For the linearized Vicsek model (8) and (13), let θi(0)∈ [0, 2π), and the initial neighbor graph is connected. So, the model will achieve synchronization if it meets the following condition,where d is defined as in Equation (18). 6. Simulation Results
The efficiency and validation of the proposed strategy is defined in this section. By simulating the scenario using MATLAB 2019. The dimensions for the mission area are (x, y, z) = (30, 30, 2) km. Firstly, in this research, we simulate the scenario by parallel implementing the design hierarchy with the non-dominated sorting genetic algorithm II (NSGA-II) algorithm to check the validity of our scheme.
Table 1 presents the constraints used in the algorithm. Now
α and
β control the effect of pheromone or heuristics on the outcome. To get a heuristic solution, we select a bigger value of
β compared to
α. The pheromone evaporation rate is
ρ.
ρ controls the speed at which the pheromones evaporate from the path. We want a relatively higher value for
ρ because we need the previous pheromones to evaporate faster and to make way for new pheromones with better information.
Ncmax represents the maximum number of iterations,
m is the total ants.
Ncmax and
m depend on each other. The higher the number of ants, the lower the iterations. If we decreased the number of ants we need to run more iterations.
Q is the constant that controls the pheromone rate. We have selected a relatively higher value of Q because we want more pheromone depositing on the trail. τmin and τmax are the minimum and maximum pheromones values. The reason we restricted the algorithm within this interval is that it has the best chance of discovering the best solution. The minimum and maximum velocities of the UAV are vmin and vmax. These velocities are chosen to best represent the real-life speeds of the UAVs. Lastly, ϕmax is the maximum turning angle. The reason to choose 105° is that at higher angles, chances of collision among UAVs increase.
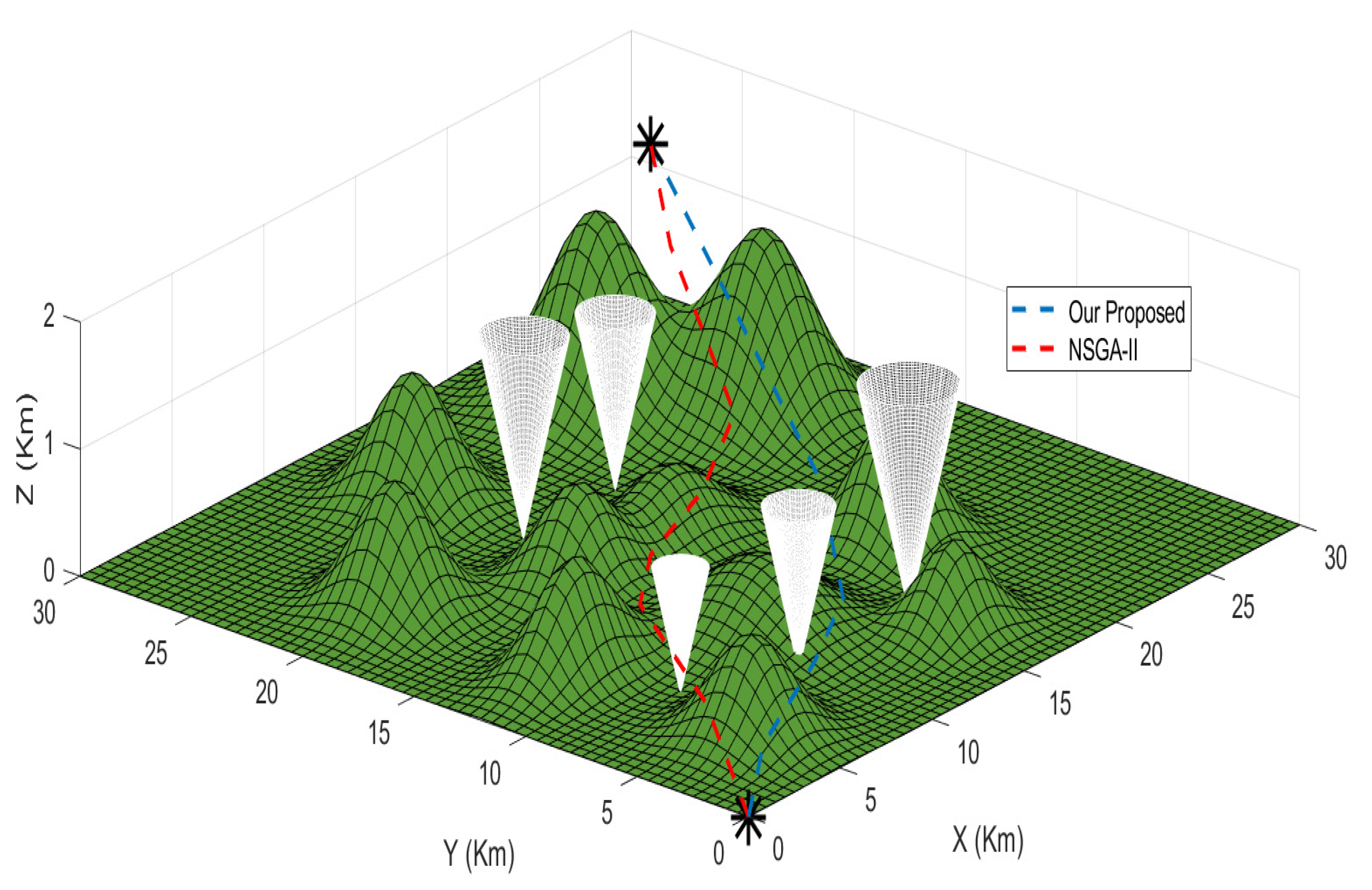
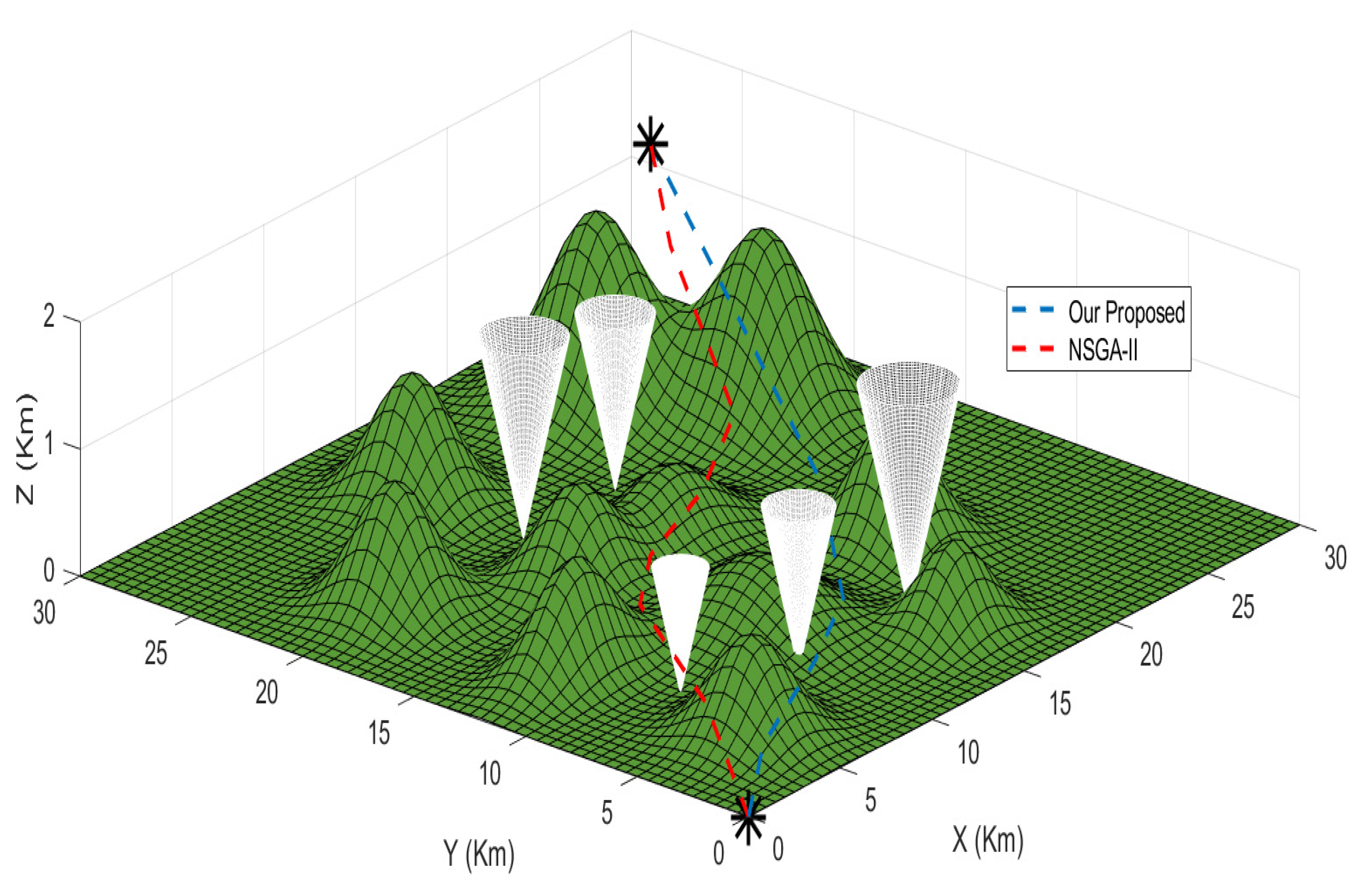
First, we compare our proposed method with the NSGA-II algorithm to prove the effectiveness of our method. NSGA-II is a multi-objective evolutionary algorithm. It is an efficient algorithm and works on a non-dominated sorting method. It uses an elitist strategy and has an effective parameter handling approach.
Figure 5 presents the comparison between the two methods. As it is clear from the plot, our proposed method finds a shorter path than the NSGA-II while also avoiding the hilly peaks and tornadoes. This is because our proposed method is computationally faster than the NSGA-II and hence, can plot the path quicker than NSGA-II while avoiding the obstacles. Meanwhile, the NSGA-II also takes more turns than our proposed method. Frequent turns can introduce instability and inconsistency in the flight.
Table 2 presents the flight details of the comparison between the proposed method and the NSGA-II algorithm. Confirming the previous simulation given in
Figure 5, we can see that the path planned by the proposed method is over 2 km shorter than the NSGA-II. This proves the superiority of the designed strategy over NSGA-II.
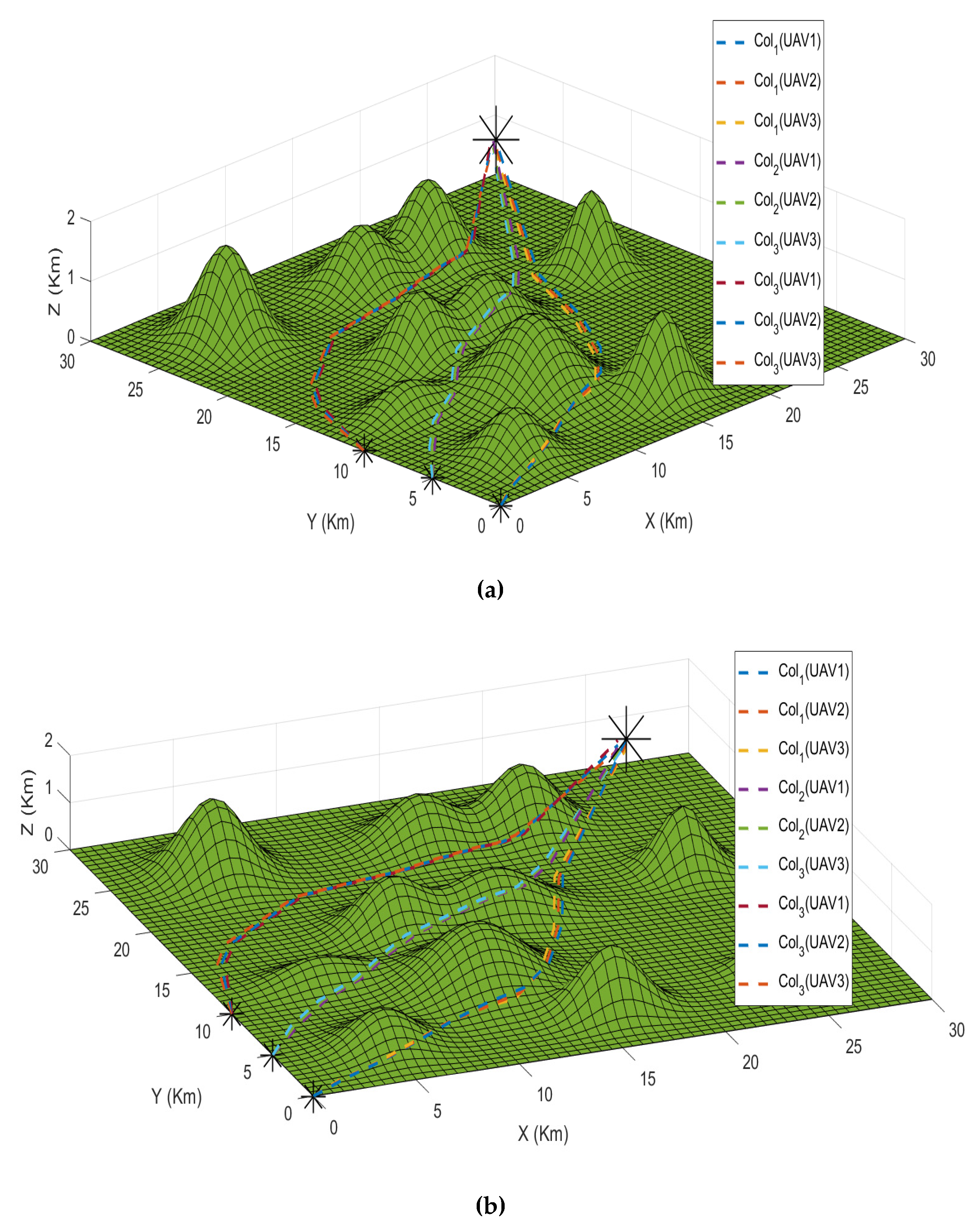
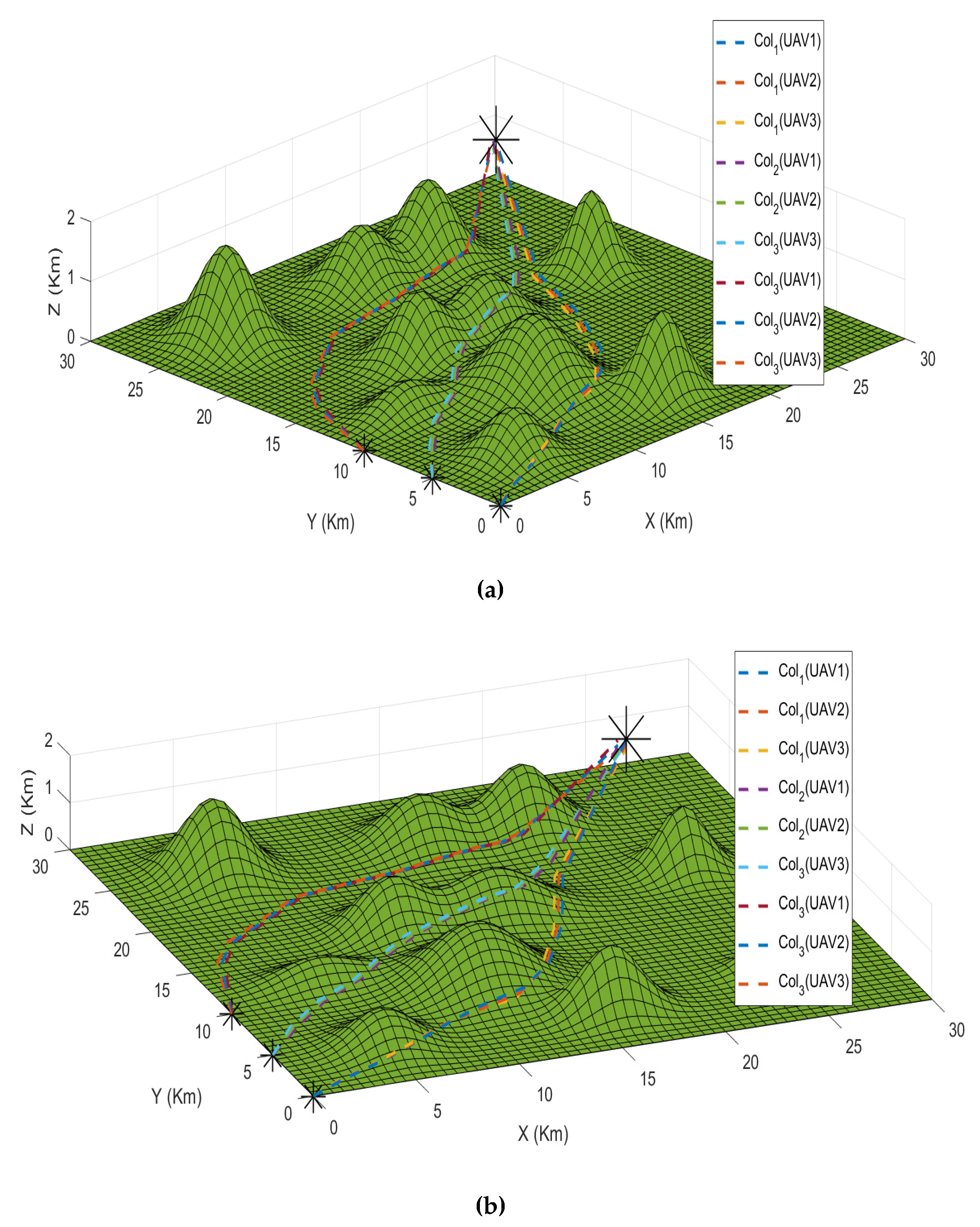
Case Study I: In this scenario, to test the efficiency of the designed strategy, we consider three ant colonies that launch from three different positions and arrive at the destination concurrently. The environment is hazardous and contains hilly peaks. First, each colony uses MMACO to find its best ant. MMACO achieves this by continuously modeling a journey of a colony of ants from the initial point to the destination. Whenever an ant finds an obstacle, it changes its direction and leaves a pheromone for other ants so they can avoid the obstacle as well. This process is repeated a fixed number of times until the best ant with the shortest distance is discovered.
Afterward, Vicsek MAS designates the best ant as the leader and the rest of the ants follow the leader as agents.
Figure 6 illustrates the proposed strategy in action and shows that our strategy will easily fulfill the mission requirement.
Figure 6a presents the 3D simulation from one view while
Figure 6b presents it from another angle.
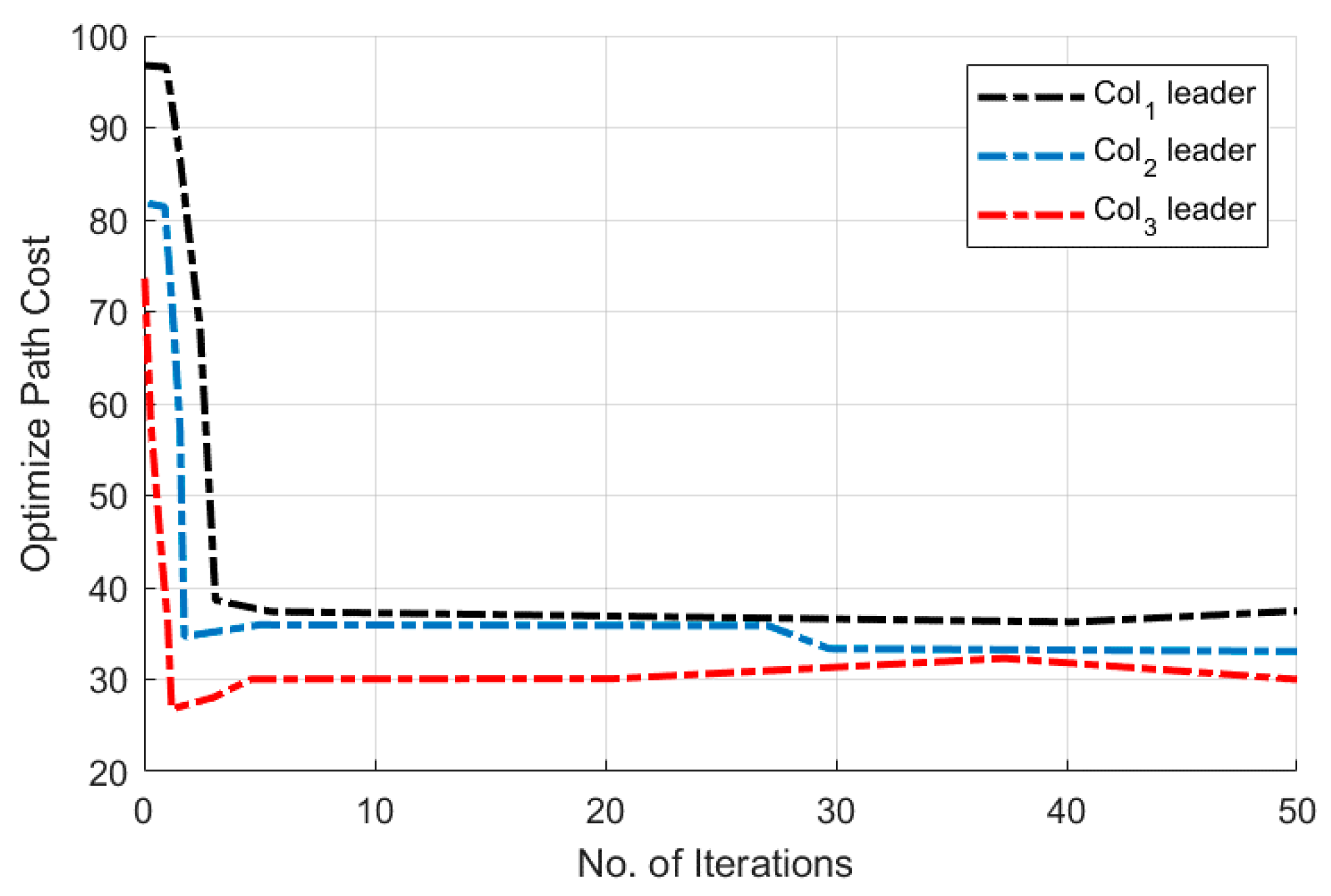
Figure 7 demonstrates the optimization costs of finding the best path. It is clear from
Figure 7 that we find no significant decline in the cost after the 5th iteration. There is a slight variation in the costs of colonies 2 and 3 but is negligible. The reason for this decline is that the algorithm has discovered the best route around the 5th iteration. Afterward, the ants just travel on the best path and hence almost the same cost for the subsequent iterations.
Table 3 shows the flight details of the best ant of each colony.
Table 3 also shows the complete flight distance from the initial position to the target.
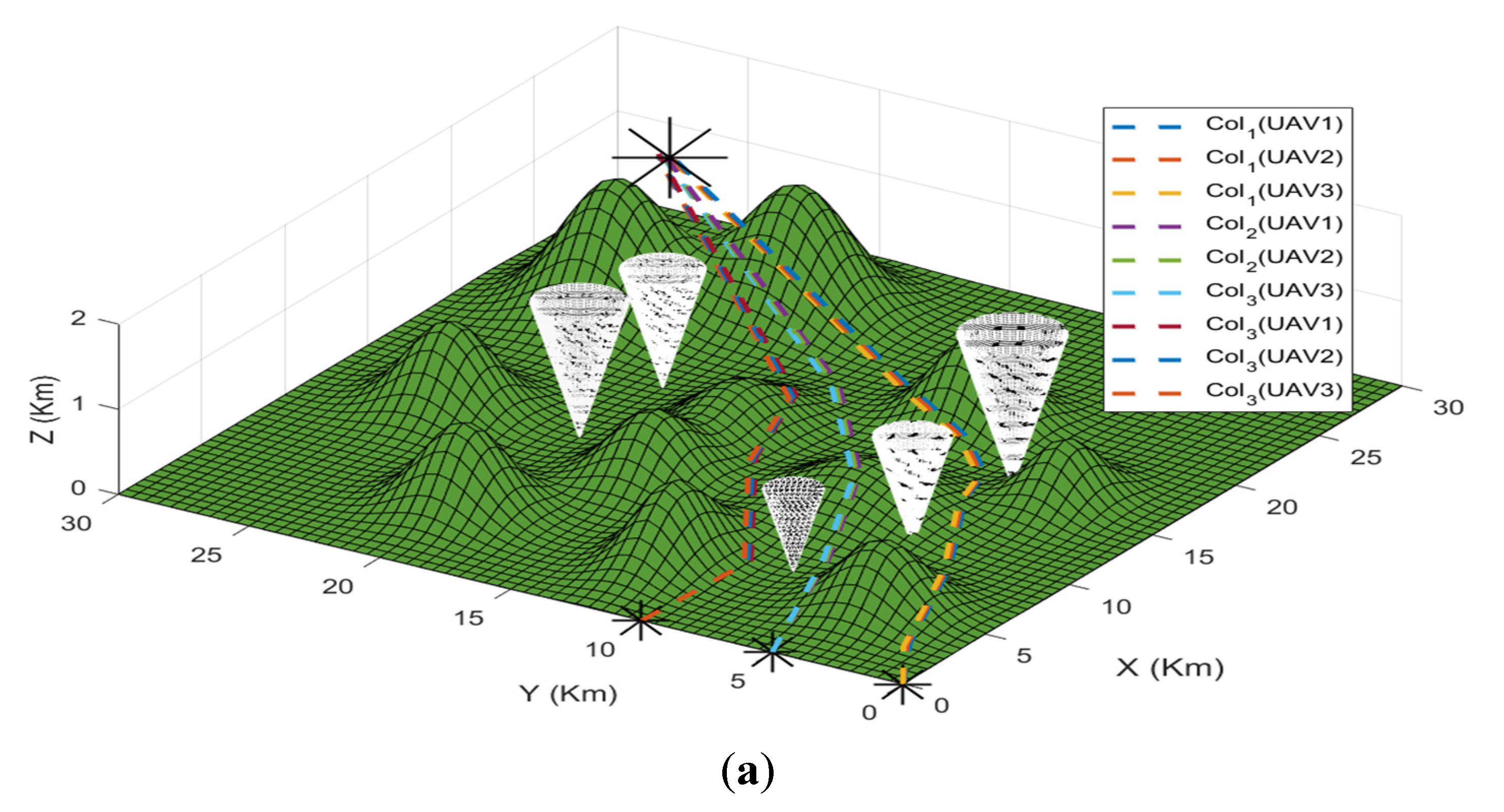
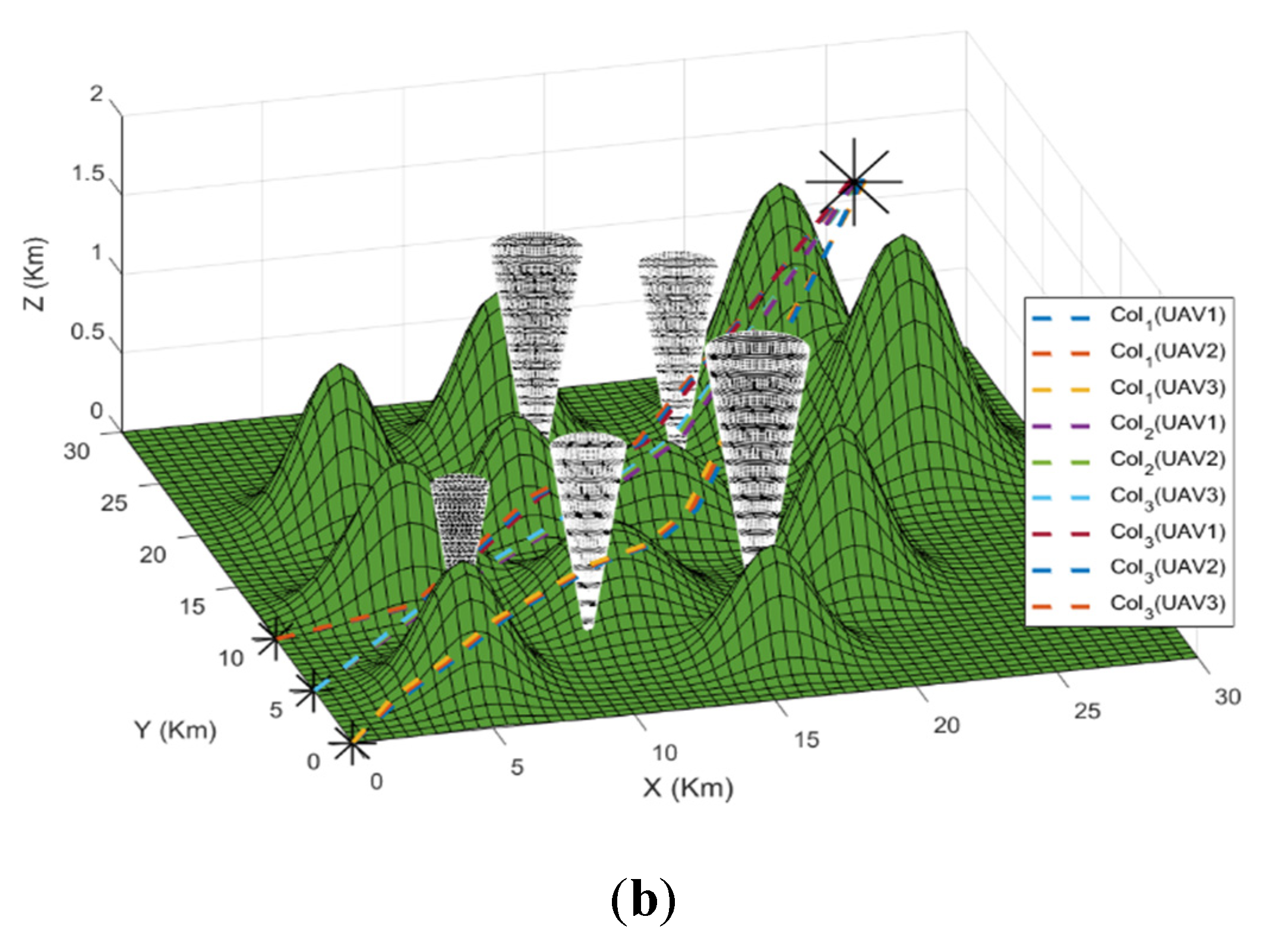
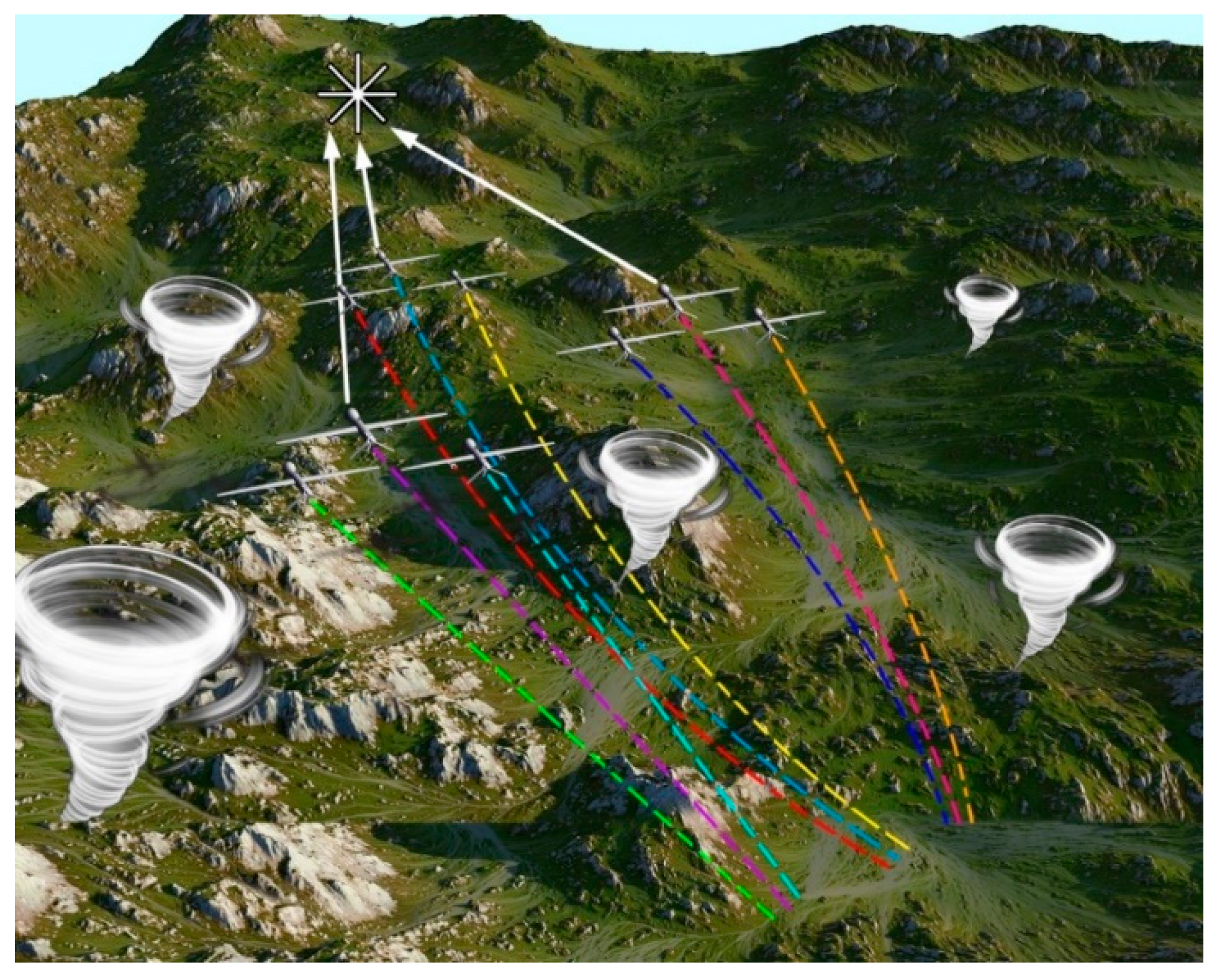
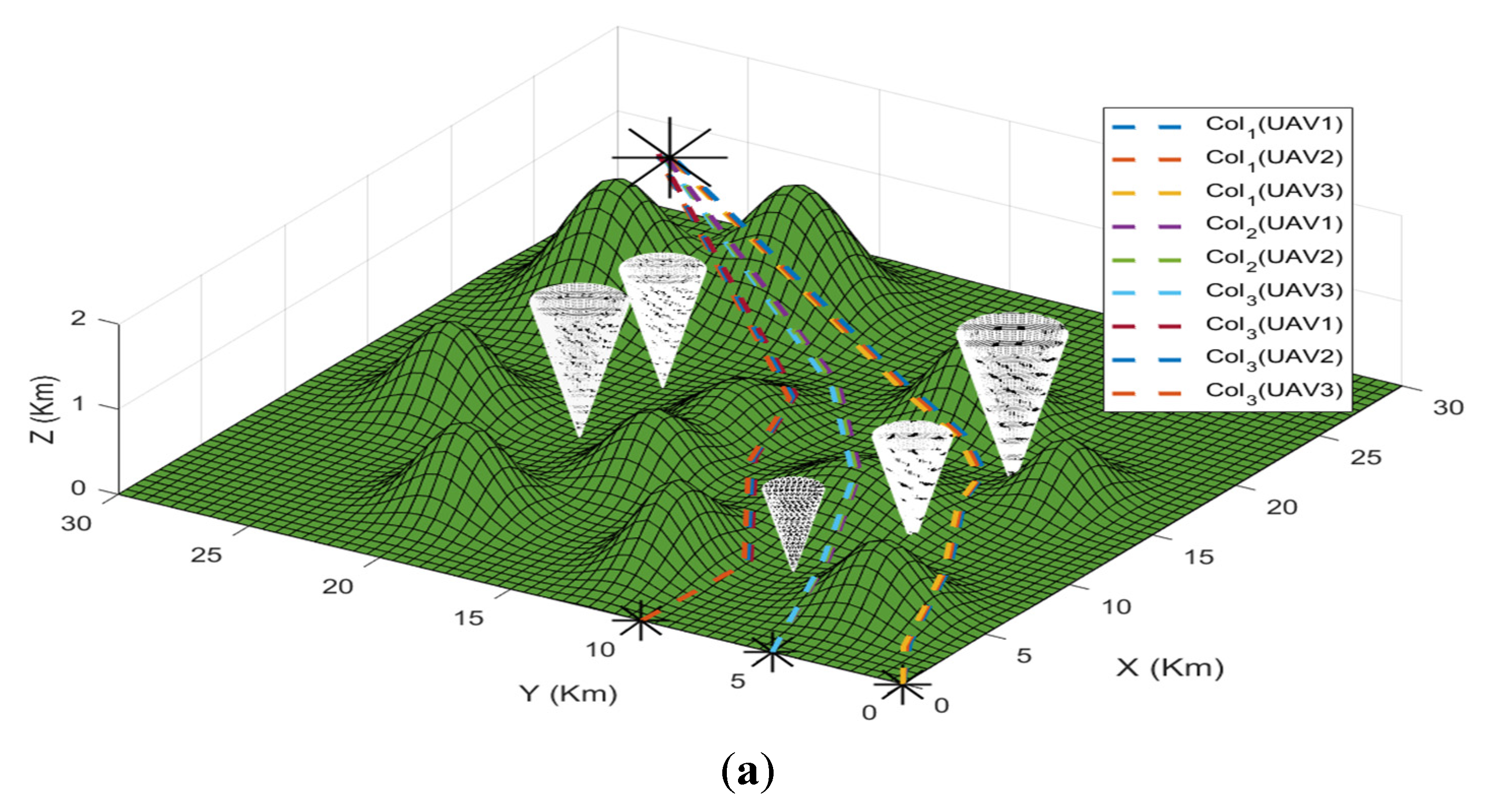
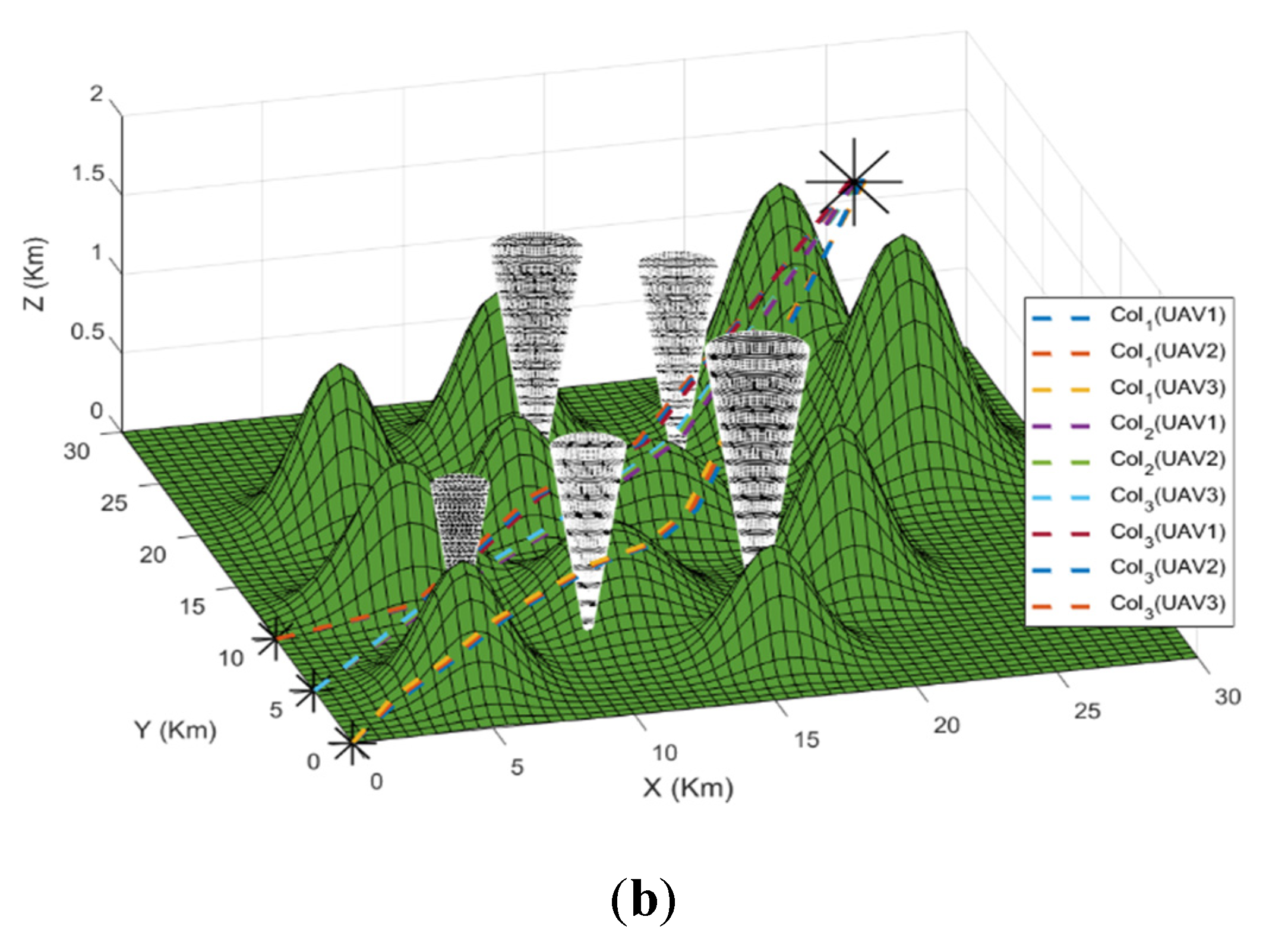
Case Study II: In this scenario, to test the efficiency of the designed strategy, we consider three ant colonies (UAVs) that launch from three different positions and arrive at the destination concurrently. The environment is dynamic and contains not only hilly peaks but also tornadoes. First, each colony uses MMACO to find its best ant. The process of finding the ant is similar to the one explained in
Case Study I. Afterward, Vicsek MAS designates the best ant as the leader and the rest of the ants follow the leader as agents.
Figure 8 illustrates the proposed strategy in action and shows that our strategy will easily fulfill the mission requirement.
Figure 8a shows the mission area from one point of view while
Figure 8b presents it with another view to clearly show the peaks and tornadoes.
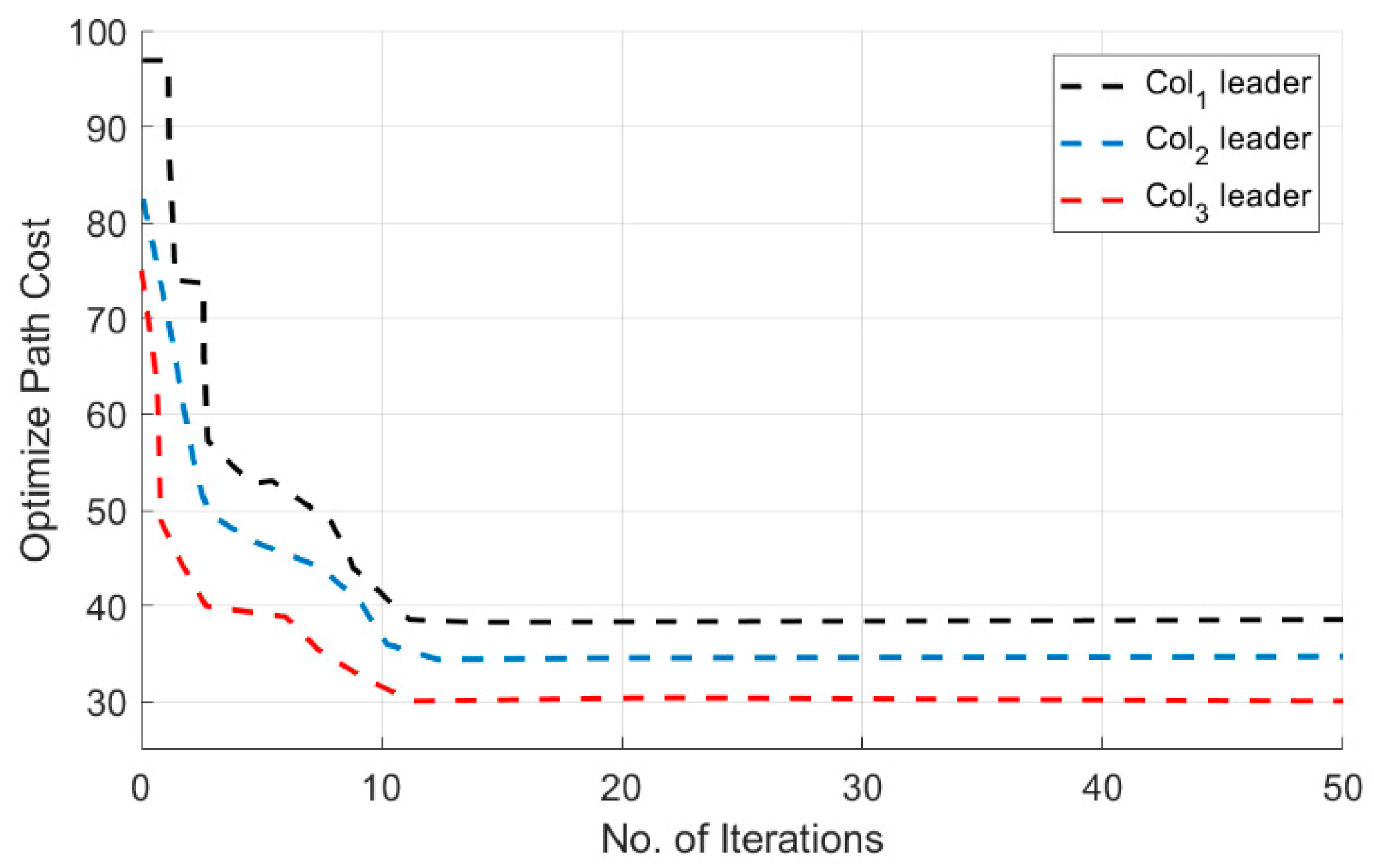
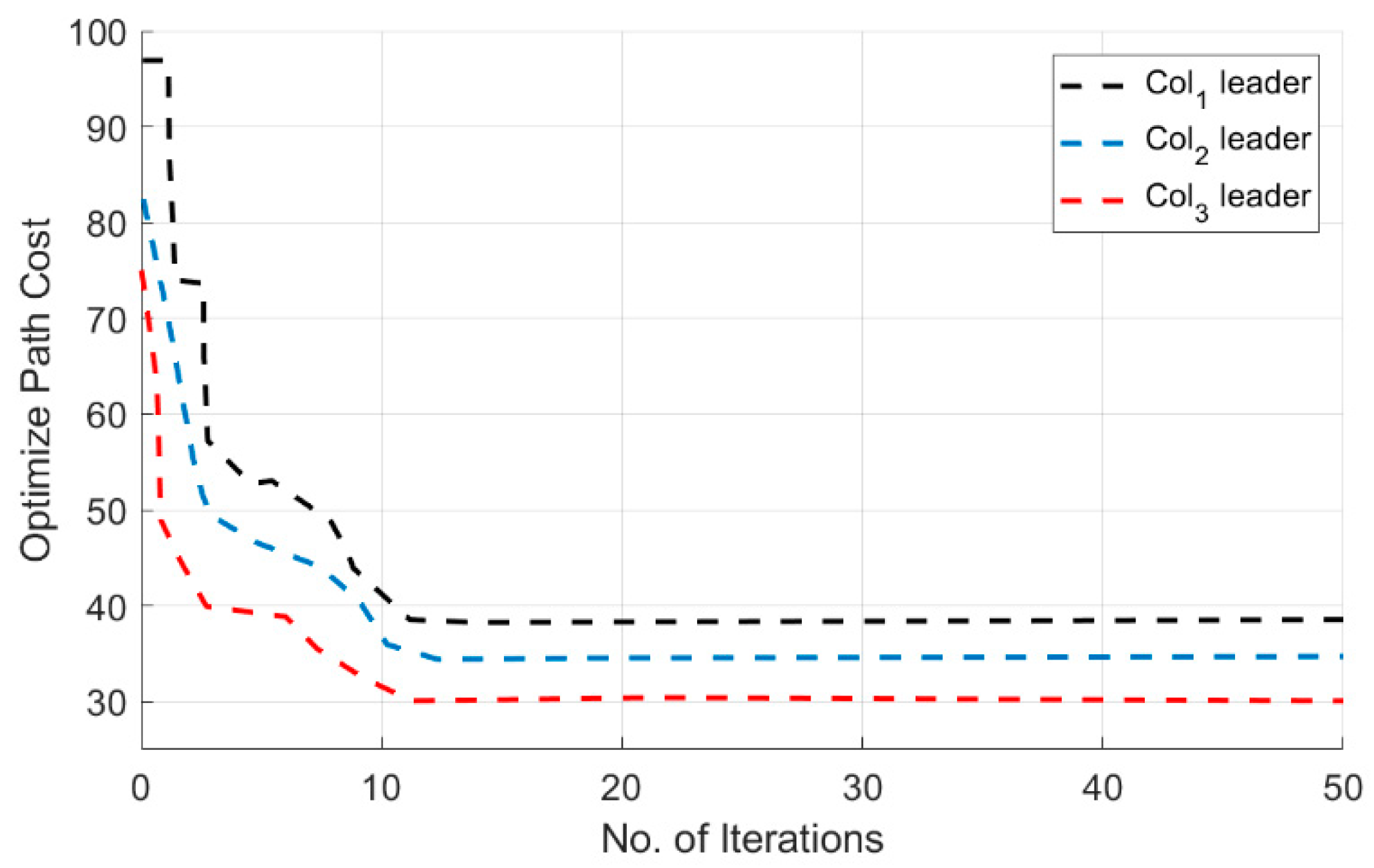
Figure 9 demonstrates the optimization costs of finding the best path. It is clear from
Figure 9 that we find no significant decline in the cost after the 10th iteration. The reason for this decline is that the algorithm has discovered the best route at around the 10th iteration. Afterward, the ants just travel on the best path and hence almost the same cost for the subsequent iterations.
Table 4 shows the flight details of the best ant of each colony.
Table 4 also shows the complete flight distance from the initial position to the target.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}