
A Feasibility Study for a Nonlinear Guided Wave Mixing Technique




Abstract
:1. Introduction
- Based on bulk wave mixing theory and several assumptions, guided wave mixing technique is studied theoretically.
- Based on theoretical study, an experimental test is conducted. Both the available mixing condition and non-available mixing condition are experimented with.
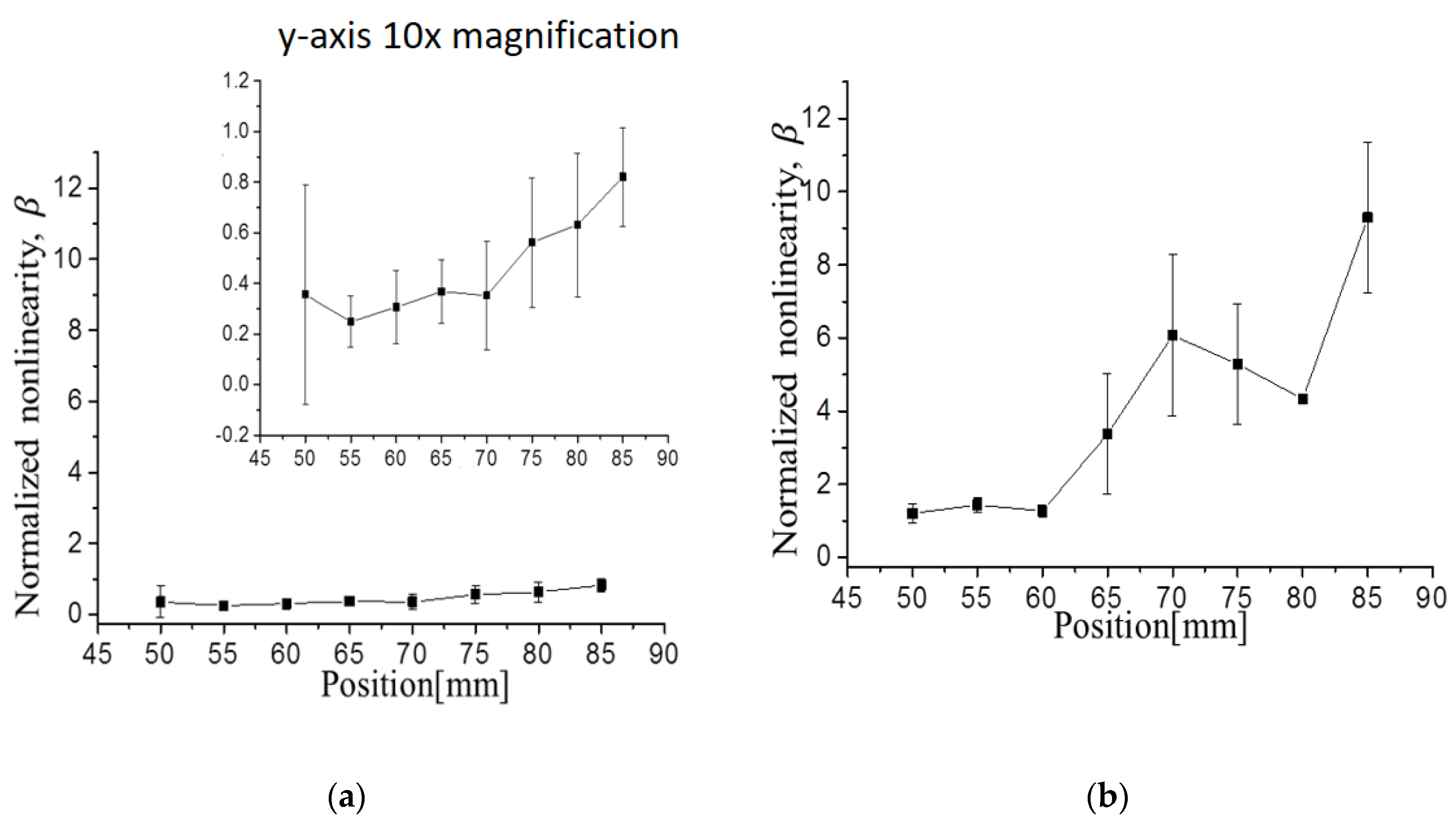
- As the distance is changed, nonlinearity is measured by the conventional technique and the guided wave mixing technique for comparison.
2. Theory
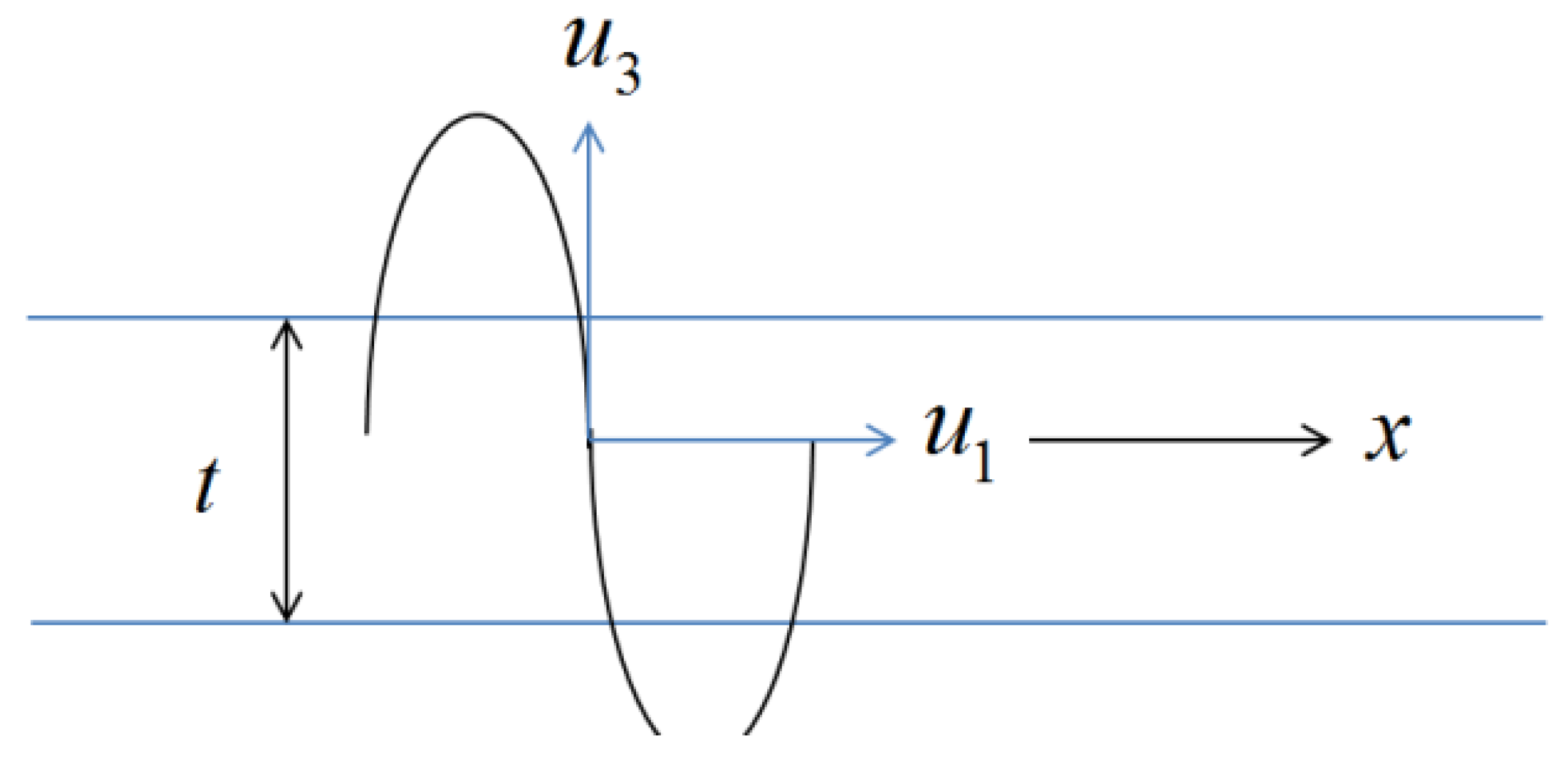
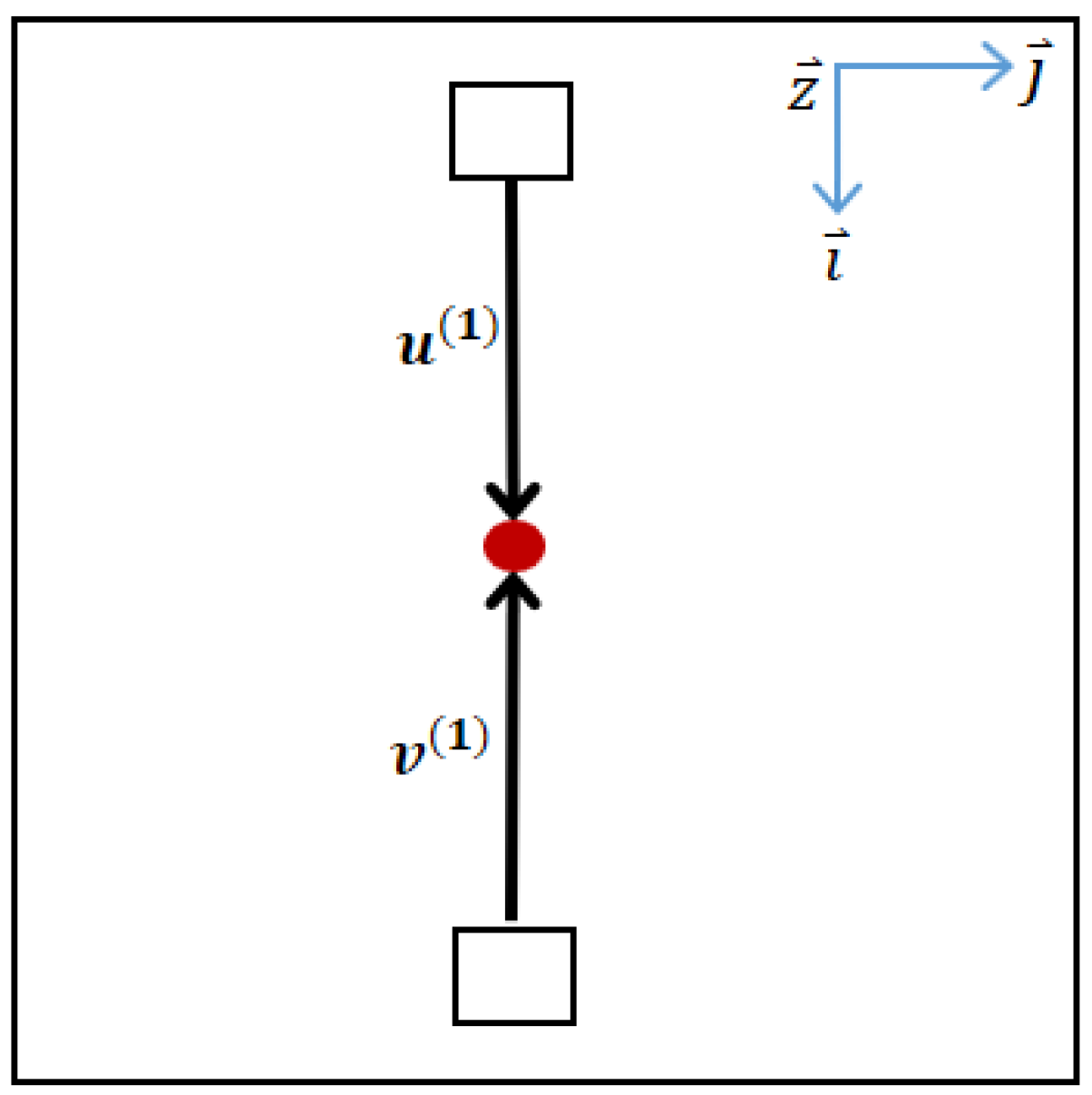
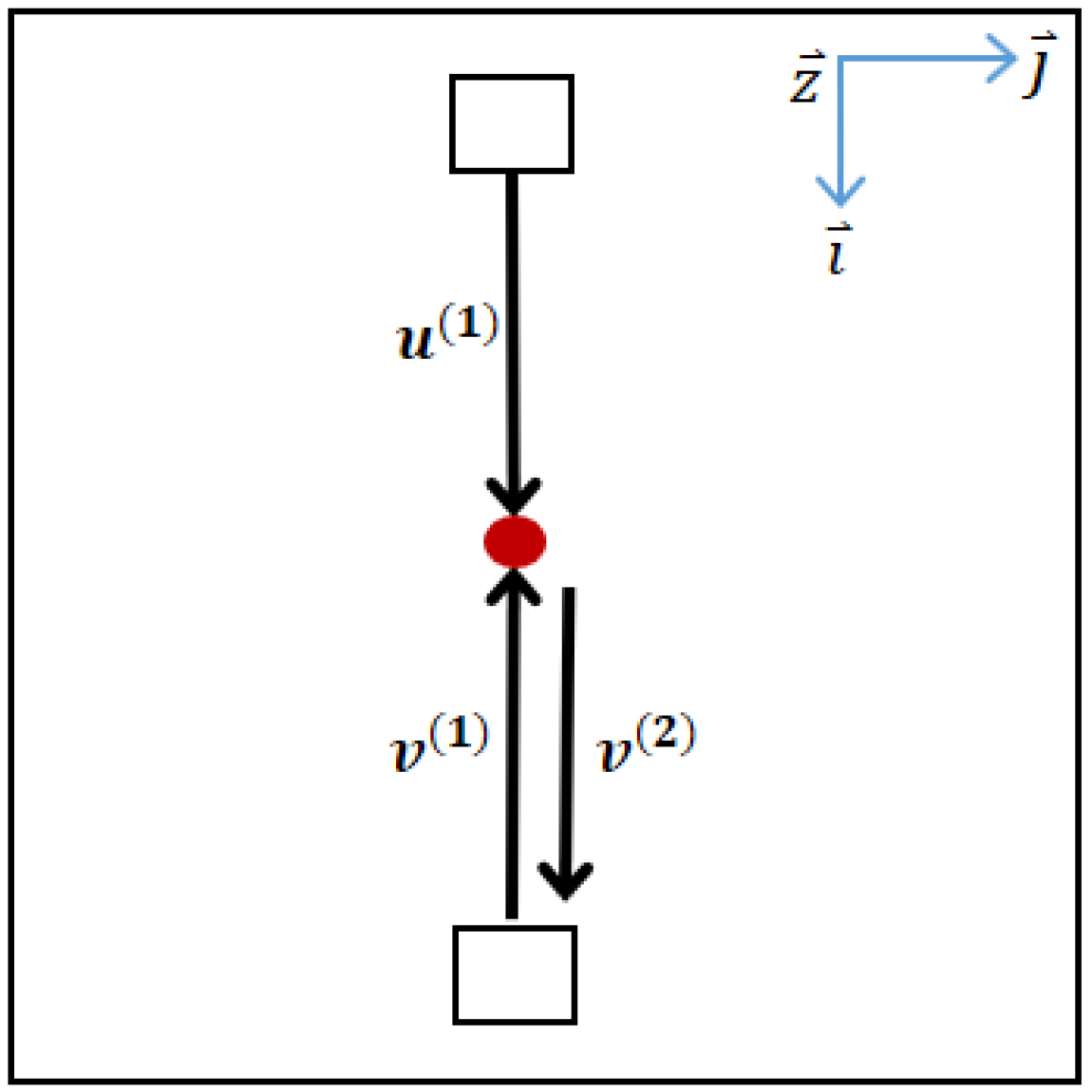
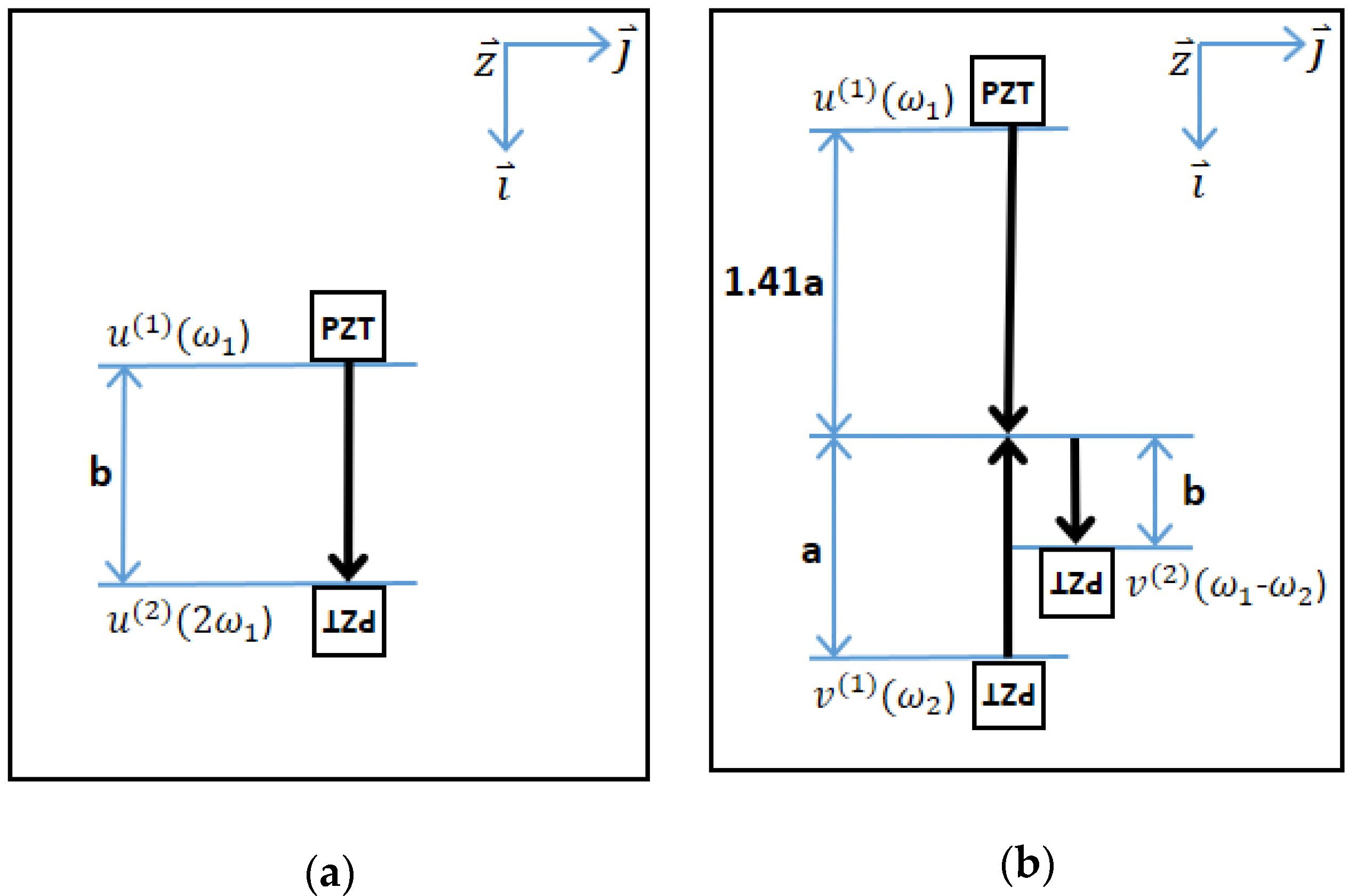
2.1. Guided Wave Mixing Theory
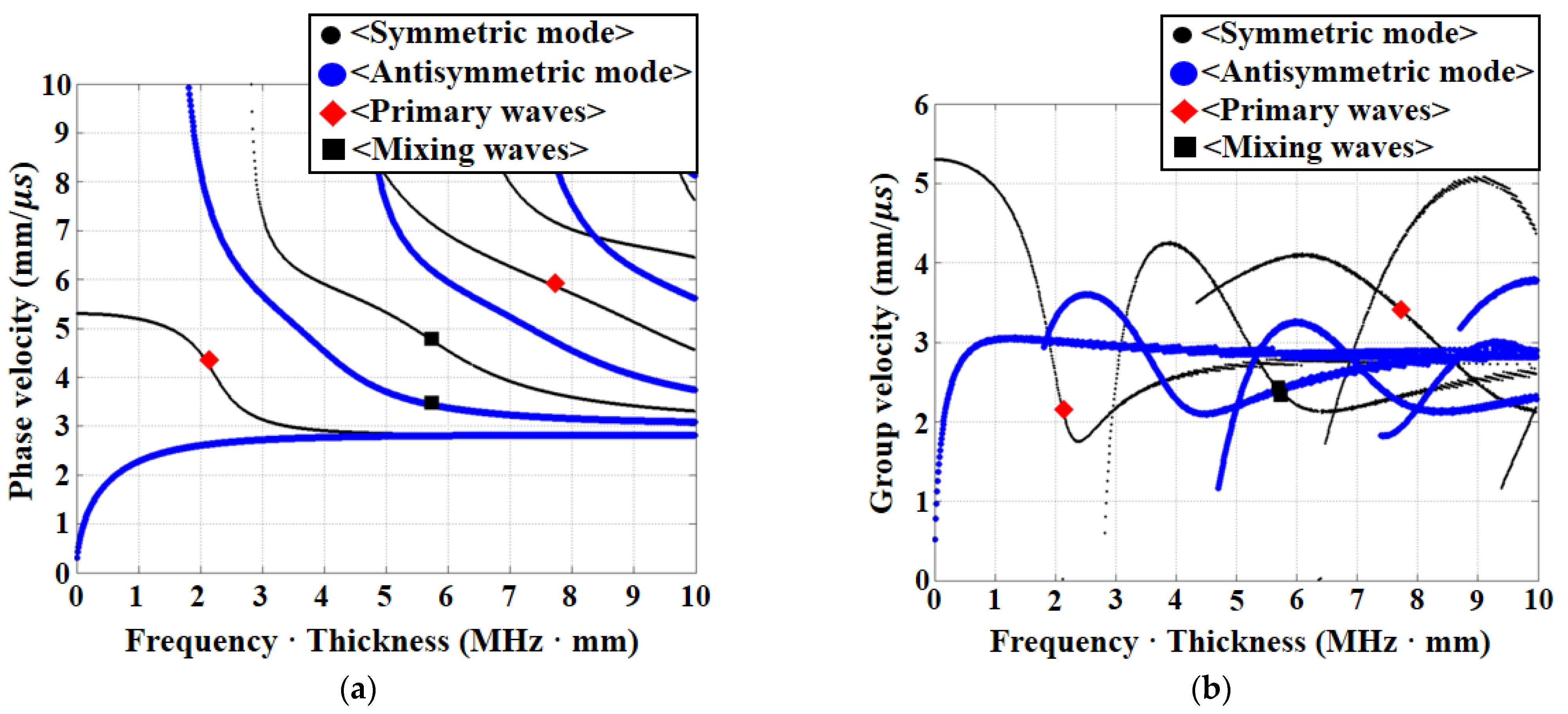
2.2. Phase Matching Mode Theory
3. Experimental Setup
3.1. Experimental Setup for Guided Wave Mixing Generation
3.2. Standard for Guided Wave Mixing Signal Detection
4. Results
4.1. Experimental Result of Guided Wave Mixing Signal Generation
4.2. Comparison of Guided Wave Mixing Technique and Phase Matching Mode Experimental Setup and Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pruell, C.; Kim, J.-Y.; Qu, J.; Jacobs, L.J. Evaluation of plasticity driven material damage using Lamb waves. Appl. Phys. Lett. 2007, 91, 231911. [Google Scholar] [CrossRef]
- Kim, J.-Y.; Jacobs, L.; Qu, J.; Littles, J.W. Experimental characterization of fatigue damage in a nickel-base superalloy using nonlinear ultrasonic waves. J. Acoust. Soc. Am. 2006, 120, 1266–1273. [Google Scholar] [CrossRef]
- Cantrell, J.H.; Yost, W. Nonlinear ultrasonic characterization of fatigue microstructures. Int. J. Fatigue 2001, 23, 487–490. [Google Scholar] [CrossRef]
- Liu, M.; Tang, G.; Jacobs, L.; Qu, J.; Thompson, D.O.; Chimenti, D.E. Measuring acoustic nonlinearity by collinear mixing waves. AIP Conf. Proc. 2011, 1335, 322. [Google Scholar] [CrossRef]
- Achenbach, J.D.; Wang, Y. Far-field resonant third harmonic surface wave on a half-space of incompressible material of cubic nonlinearity. J. Mech. Phys. Solids 2018, 120, 5–15. [Google Scholar] [CrossRef]
- Jeong, H.; Choi, S. Ultrasonic measurement of the nonlinear parameter using third harmonic waves—1. Theory. J. Korean Soc. Nondestruct. Test. 2021, 41, 50–58. [Google Scholar] [CrossRef]
- Croxford, A.J.; Wilcox, P.D.; Drinkwater, B.W.; Nagy, P.B. The use of non-collinear mixing for nonlinear ultrasonic detection of plasticity and fatigue. J. Acoust. Soc. Am. 2009, 126, EL117–EL122. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jones, G.L.; Kobett, D.R. Interaction of Elastic Waves in an Isotropic Solid. J. Acoust. Soc. Am. 1963, 35, 5–10. [Google Scholar] [CrossRef]
- Taylor, L.H.; Rollins, J.F.R. Ultrasonic Study of Three-Phonon Interactions. I. Theory. Phys. Rev. 1964, 136, A591–A596. [Google Scholar] [CrossRef]
- Li, F.; Zhao, Y.; Cao, P.; Hu, N. Mixing of ultrasonic Lamb waves in thin plates with quadratic nonlinearity. Ultrasonics 2018, 87, 33–43. [Google Scholar] [CrossRef]
- Jingpin, J.; Xiangji, M.; Cunfu, H.; Bin, W. Nonlinear Lamb wave-mixing technique for micro-crack detection in plates. NDT E Int. 2017, 85, 63–71. [Google Scholar] [CrossRef]
- Qureshi, K.K.; Wang, S.H.; Wai, P.; Tam, H.Y.; Lu, C.; Sugimoto, N. Width-tunable pulse generation using four-wave mixing in bismuth based highly nonlinear fiber. Opt. Commun. 2007, 275, 223–229. [Google Scholar] [CrossRef]
- Lin, S.; Wang, Z.; Li, J.; Chen, S.; Rao, Y.; Peng, G.; Gomes, A.S.L. Nonlinear dynamics of four-wave mixing, cascaded stimulated Raman scattering and self Q-switching in a common-cavity ytterbium/Raman random fiber lase. Opt. Laser Technol. 2021, 134, 106613. [Google Scholar] [CrossRef]
- Zhu, W.; Deng, M.; Xiang, Y.; Xuan, F.-Z.; Liu, C.; Wang, Y.-N. Modeling of ultrasonic nonlinearities for dislocation evolution in plastically deformed materials: Simulation and experimental validation. Ultrasonics 2016, 68, 134–141. [Google Scholar] [CrossRef]
- Liu, X.; Bo, L.; Liu, Y.; Zhao, Y.; Zhang, J.; Hu, N.; Fu, S.; Deng, M. Detection of micro-cracks using nonlinear lamb waves based on the Duffing-Holmes system. J. Sound Vib. 2017, 405, 175–186. [Google Scholar] [CrossRef]
- Li, W.; Hu, S.; Deng, M. Combination of Phase Matching and Phase-Reversal Approaches for Thermal Damage Assessment by Second Harmonic Lamb Waves. Materials 2018, 11, 1961. [Google Scholar] [CrossRef] [Green Version]
- Guan, R.; Lu, Y.; Wang, K.; Su, Z. Fatigue crack detection in pipes with multiple mode nonlinear guided waves. Struct. Health Monit. 2018, 18, 180–192. [Google Scholar] [CrossRef]
- Park, J.; Lee, J.; Min, J.; Cho, Y. Defects Inspection in Wires by Nonlinear Ultrasonic Guided Wave Generated by Electro-magnetic Sensors. Appl. Sci. 2020, 10, 4479. [Google Scholar] [CrossRef]
- Metya, A.K.; Tarafder, S.; Balasubramaniam, K. Nonlinear Lamb wave mixing for assessing localized deformation during creep. NDT E Int. 2018, 98, 89–94. [Google Scholar] [CrossRef] [Green Version]
- Yeung, C.; Tai, N.G. Nonlinear guided wave mixing in pipes for detection of material nonlinearity. J. Sound Vib. 2020, 485, 115541. [Google Scholar] [CrossRef]
- Sun, M.; Qu, J. Analytical and numerical investigations of one-way mixing of Lamb waves in a thin plate. Ultrasonics 2020, 108, 106180. [Google Scholar] [CrossRef]
- Blanloeuil, P.; Rose, L.; Veidt, M.; Wang, C. Nonlinear mixing of non-collinear guided waves at a contact interface. Ultrasonics 2021, 110, 106222. [Google Scholar] [CrossRef] [PubMed]
- Ishii, Y.; Hiraoka, K.; Adachi, T. Finite-element analysis of non-collinear mixing of two lowest-order antisymmetric Rayleigh–Lamb waves. J. Acoust. Soc. Am. 2018, 144, 53–68. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.; Lee, J.; Cho, Y. Experimental Study on Corrosion Detection of Aluminum alloy using Lamb wave Mixing Technique. Trans. Korean Soc. Mech. Eng. 2016, 40, 919–925. [Google Scholar] [CrossRef]
- Lee, J.; Choi, J.; Choi, H.; Cho, Y. Evaluation of Corrosion of a Material Using Guided Ultrasonic Mixing Technique. Trans. Korean Soc. Mech. Eng. A 2017, 41, 1203–1208. [Google Scholar] [CrossRef]
- Cho, H.J.; Hasanian, M.; Shana, S.; Lissenden, C.J. Nonlinear guided wave technique for localized damage detection in plates with surface-bonded sensors to receive Lamb waves generated by shear-horizontal wave mixing. NDT E Int. 2019, 102, 35–46. [Google Scholar] [CrossRef]
- Shan, S.; Hasanian, M.; Cho, H.; Lissenden, C.J.; Cheng, L. New nonlinear ultrasonic method for material characterization: Codirectional shear horizontal guided wave mixing in plate. Ultrasonics 2019, 96, 64–74. [Google Scholar] [CrossRef]
- Li, W.; Xu, Y.; Hu, N.; Deng, M. Impact damage detection in composites using a guided wave mixing technique. Meas. Sci. Technol. 2019, 31, 014001. [Google Scholar] [CrossRef]
- Ju, T.; Achenbach, J.D.; Jacobs, L.J.; Qu, J. Nondestructive evaluation of thermal aging of adhesive joints by using a nonlinear wave mixing technique. NDT E Int. 2019, 103, 62–67. [Google Scholar] [CrossRef]
- Viktorov, I.A. Rayleigh and Lamb Waves: Physical Theory and Applications; Plenum Press: New York, NY, USA, 1967. [Google Scholar]
- Rose, J.L.; Nagy, P.B. Ultrasonic Waves in Solid Media; Cambridge University Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Norris, A.N. Finite Amplitude Waves in Solids: Nonlinear Acoustics; Academic Press: San Diego, CA, USA, 1998. [Google Scholar]
- Korneev, V.A.; Nihei, K.T.; Myer, L.R. Nonlinear Interaction of Elastic Waves in Solids; University of California: Berkeley, CA, USA, 1988. [Google Scholar]
- Krasilnikov, V.; Zarembo, L. Nonlinear Interaction of Elastic Waves in Solids. IEEE Trans. Sonics Ultrason. 1967, 14, 12–17. [Google Scholar] [CrossRef]
- Deng, M. Cumulative second-harmonic generation of Lamb-mode propagation in a solid plate. J. Appl. Phys. 1999, 85, 3051–3058. [Google Scholar] [CrossRef]
- Li, W.; Cho, Y.; Achenbach, J.D. Detection of thermal fatigue in composites by second harmonic Lamb waves. Smart Mater. Struct. 2012, 21, 085019. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
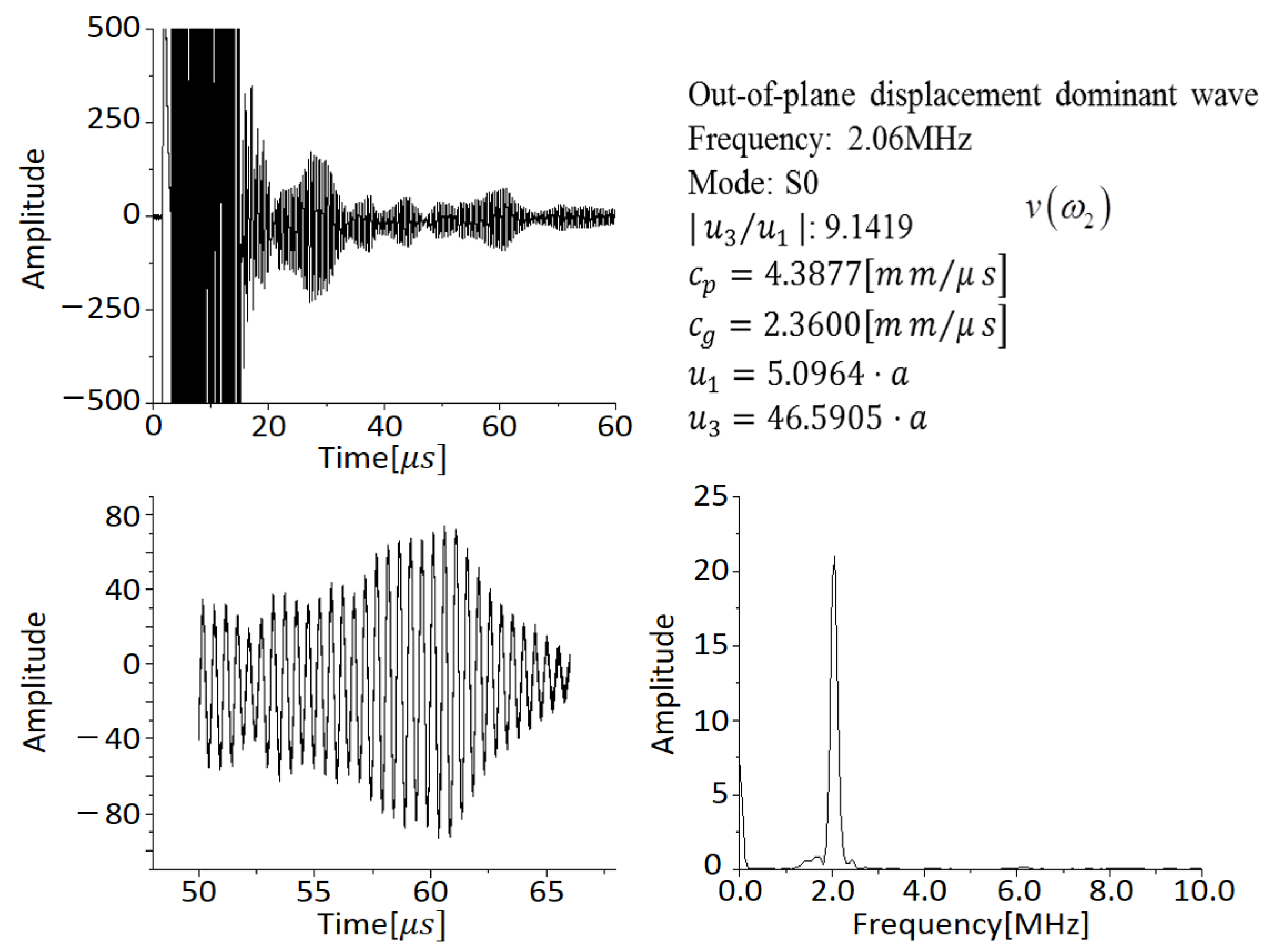
| Frequency | 7.83 MHz | 2.06 MHz |
| Mode | S2 | S0 |
| , Dispersion ratio | 0.4446 | 9.1419 |
| , Phase velocity | 5.8072 | 4.3877 |
| , Group Velocity | 3.3344 | 2.3600 |
| , In-plane displacement | 45.7428 a | 5.0964 b |
| , Out-plane displacement | 20.3373 a | 46.5905 b |
| Frequency | 5.77 MHz | 5.77 MHz |
| Mode | S1 | A1 |
| , Dispersion ratio | 2.8279 | 2.3929 |
| , Phase velocity | 4.7282 | 3.4265 |
| , Group Velocity | 2.3490 | 2.4114 |
| , In-plane displacement | 61.7937 c | 295.5737 c |
| , Out-plane displacement | 174.7443 d | 707.2642 d |
| No. | Type of Data | Explanation | Remarks |
|---|---|---|---|
| 1 | 2.06 MHz | Only 2.06 MHz is generated | Experimental result |
| 2 | 5.77 MHz | Both (2.06 and 7.38) MHz are generated at the same time | Experimental result |
| 3 | 7.83 MHz | Only 7.83 MHz is generated | Experimental result |
| 4 | 5.77 MHz | No.2 (−) (No.1 + No.3) | Signal processing result |
| Frequency | Type | Frequency | Wedge Angle |
|---|---|---|---|
| Pulser | 3.5 MHz | MHz | 25° |
| Receiver | 7.5 MHz | MHz | 25° |
| Frequency | Type | Frequency | Wedge Angle |
|---|---|---|---|
| Pulser | 10 MHz 2.25 MHz | MHz MHz | 25° 37° |
| Receiver | 7.5 MHz | MHz | 52° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Choi, J.; Lee, J. A Feasibility Study for a Nonlinear Guided Wave Mixing Technique. Appl. Sci. 2021, 11, 6569. https://doi.org/10.3390/app11146569
Park J, Choi J, Lee J. A Feasibility Study for a Nonlinear Guided Wave Mixing Technique. Applied Sciences. 2021; 11(14):6569. https://doi.org/10.3390/app11146569
Chicago/Turabian StylePark, Junpil, Jeongseok Choi, and Jaesun Lee. 2021. "A Feasibility Study for a Nonlinear Guided Wave Mixing Technique" Applied Sciences 11, no. 14: 6569. https://doi.org/10.3390/app11146569
APA StylePark, J., Choi, J., & Lee, J. (2021). A Feasibility Study for a Nonlinear Guided Wave Mixing Technique. Applied Sciences, 11(14), 6569. https://doi.org/10.3390/app11146569