
Underwater Image Mosaic Algorithm Based on Improved Image Registration


Abstract
:1. Introduction
2. Materials and Methods
2.1. Method of Image Enhancement
2.1.1. Mixed Method for Image Contrast Enhancement
2.1.2. Sigma Filtering for Original Image Denoising
2.1.3. Quality Evaluation Index of Image Enhancement Effect
2.2. Detection of Feature Points with SIFT
2.2.1. Detection of Scale-Space Extrema
2.2.2. Accurate Keypoint Localization
2.2.3. Orientation Assignment
2.2.4. Keypoint Descriptor
2.3. Accurate Matching of Feature Points Based on the IIR Algorithm
2.3.1. A Universal Framework for RANSAC
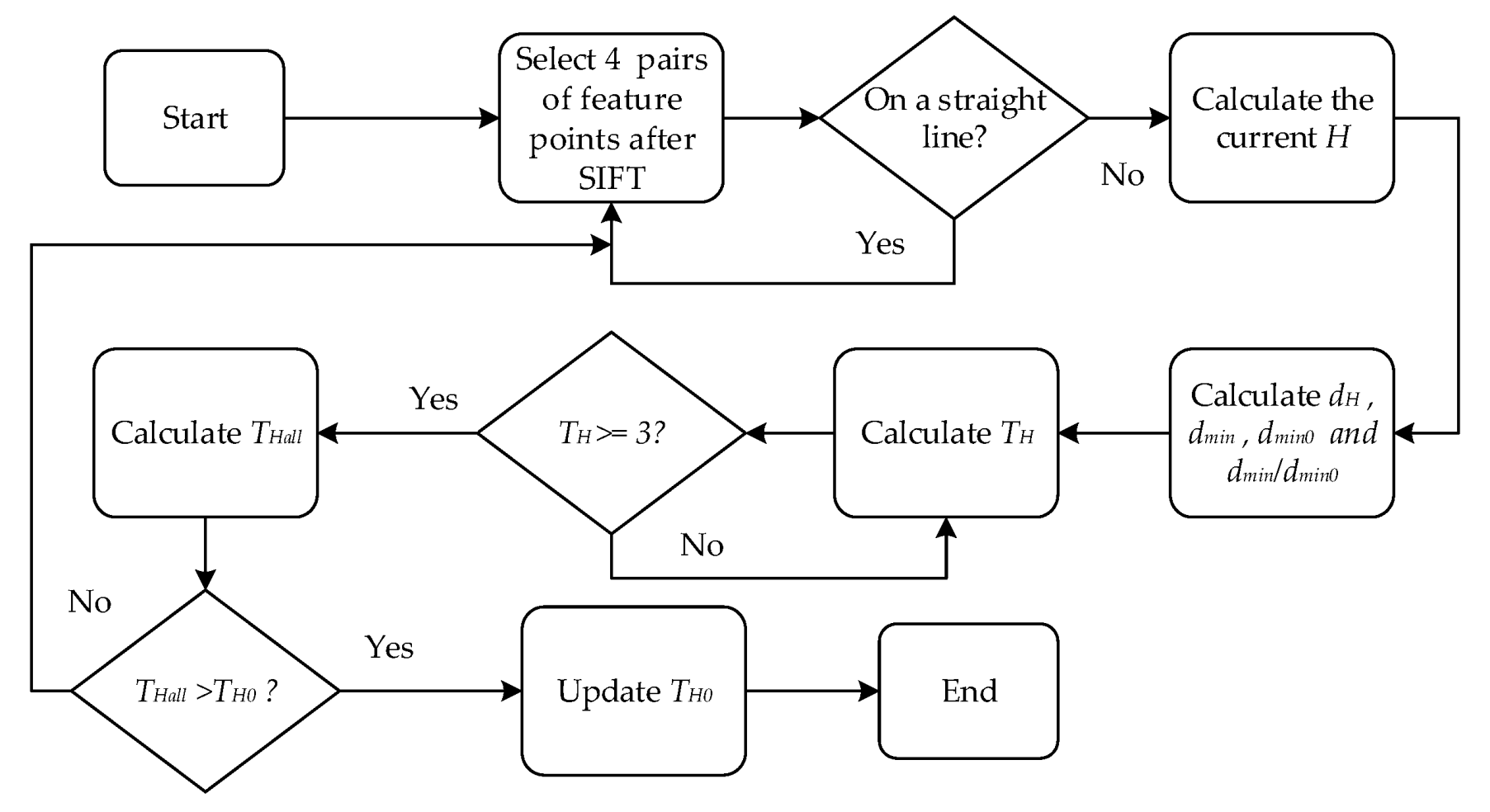
2.3.2. The IIR Algorithm
2.4. Image Fusion Method
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hines, D. Immediate and delayed recognition of sequentially presented random shapes. J. Exp. Psychol. Hum. Learn. Mem. 1975, 1, 634–639. [Google Scholar] [CrossRef]
- Harris, C.; Stephens, M. A Combined Corner and Edge Detector. In Proceedings of the 4th Alvey Vision Conference, Alvey, UK, 31 August–2 September 1988; pp. 147–151. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Rosten, E.; Tom, D. Machine learning for high-speed corner detection. In Proceedings of the 7th European Conference on Computer Vision, Berlin, Germany, 7–13 May 2006; Springer: Berlin, Germany, 2006; pp. 430–443. [Google Scholar]
- Bay, H.; Ess, A.; Tuytelaars, T. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Michael, C.; Vincent, L.; Pascal, F. Brief: Binary robust independent elementary features. In Proceedings of the 11th European Conference on Computer Vision, Hersonissos, Greece, 5–11 September 2010; Springer: Hersonissos, Greece, 2010; pp. 778–792. [Google Scholar]
- Ghosh, D.; Kaabouch, N. A survey on image mosaicing techniques. J. Vis. Commun. Image Represent. 2016, 34, 1–11. [Google Scholar] [CrossRef]
- Liu, J.; Fu, W.P.; Wang, W. Image matching based on improved SIFT algorithm. Chin. J. Sci. Instrum. 2017, 35, 1107–1112. [Google Scholar]
- Zhu, Z.W.; Shen, Z.F.; Luo, J.C. Parallel remote sensing image registration based on improved SIFT point feature. J. Remote Sens. 2011, 15, 1024–1039. [Google Scholar]
- Yi, N.J.; Wu, D.W.; Qi, J.Y. A method to extract high robust keypoints based on improved SIFT. Chin. J. Aeronaut. 2012, 33, 2313–2321. [Google Scholar]
- Raguram, R.; Chum, O.; Pollefeys, M.; Matas, J.; Frahm, J.-M. USAC: A universal framework for random sample consensus. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2022–2038. [Google Scholar] [CrossRef]
- Shi, G.J.; Xu, X.Y.; Dai, Y.P. SIFT feature point matching based on improved RANSAC algorithm. In Proceedings of the Fifth International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2013; IEEE Press: Hangzhou, China, 2013; pp. 474–477. [Google Scholar]
- Li, B.; Ming, D.L.; Yan, W.W. Image matching based on two-column histogram hashing and improved RANSAC. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1433–1437. [Google Scholar]
- Zhao, M.F.; Chen, H.J.; Song, T.; Deng, S.X. Research on image matching based on improved RANSAC-SIFT algorithm. Laser J. 2017, 7, 114–118. [Google Scholar]
- Eduardo, M.; Sonia, M.; Carlos, S. Distributed robust consensus using RANSAC and dynamic opinions. IEEE Trans. Control Syst. Technol. 2015, 23, 150–163. [Google Scholar]
- Gao, X.; Luo, J.Z.; Li, K.Q.; Xie, Z.X. Hierarchical RANSAC-based rotation averaging. IEEE Signal Process. Lett. 2020, 27, 1874–1878. [Google Scholar] [CrossRef]
- Lati, A.; Belhocine, M.; Achour, N. Robust aerial image mosaicing algorithm based on fuzzy outliers rejection. Evol. Syst. 2020, 11, 717–729. [Google Scholar] [CrossRef]
- Meher, B.; Agrawal, S.; Panda, R.; Abraham, A. A survey on region based image fusion methods. Inf. Fusion 2019, 48, 119–132. [Google Scholar] [CrossRef]
- Chen, M.M.; Rui, N.; Bo, H.; Qiu, S.Q.; Yan, T.H. Underwater image stitching based on SIFT and wavelet fusion. In Proceedings of the Oceans 2015, Genova, Italy, 18–21 May 2015; IEEE Press: Genova, Italy, 2015; pp. 12–17. [Google Scholar]
- Xie, Y.L.; Li, X.F.; Lv, J.W. Real-time underwater image registration based on SURF algorithm. J. Comput. Aided Des. Comput. Graph. 2010, 22, 2215–2220. [Google Scholar]
- Rahul, R.; Shishir, R.; Karen, P.; Sos, A. Adaptive alpha-trimmed correlation based underwater image stitching. In Proceedings of the IEEE International Symposium on Technologies for Homeland Security (HST), Waltham, MA, USA, 25–26 April 2017; IEEE Press: Waltham, MA, USA, 2017; pp. 32–39. [Google Scholar]
- Li, H.L.; Huang, Y.Q.; Zhang, Z.J. An improved faster R-CNN for same object retrieval. IEEE Access 2017, 5, 13665–13676. [Google Scholar] [CrossRef]
- Kovalevsky, V. Modern Algorithms for Image Processing; Apress: Berkeley, CA, USA, 2019. [Google Scholar] [CrossRef]
- Dong, L.L.; Ding, C.; Xu, W.H. Two improved methods based on histogram equalization for image enhancement. Chin. J. Electron. 2018, 46, 65–73. [Google Scholar]
- Majid, Z.; Ali, P.; Hassan, H. Image contrast enhancement using triple clipped dynamic histogram equalisation based on standard deviation. IET Image Process. 2019, 13, 1081–1089. [Google Scholar]
- Stimper, V.; Bauer, S.; Ernstorfer, R.; Schölkopf, B.; Xian, R.P. Multidimensional contrast limited adaptive histogram equalization. IEEE Access 2019, 7, 35–51. [Google Scholar]
- Gao, F.; Wang, K.; Yang, Z.; Wang, Y.; Zhang, Q. Underwater image enhancement based on local contrast correction and multi-scale fusion. J. Mar. Sci. Eng. 2021, 9, 225. [Google Scholar] [CrossRef]
- Yanling, H.; Lihua, H.; Zhonghua, H.; Shouqi, C.; Yun, Z.; Jing, W. Deep supervised residual dense network for underwater image enhancement. Sensors 2021, 21, 3289. [Google Scholar]
- Zhang, H.; Lei, Z.H.; Ding, X.H. Improved method of median filter. China J. Image Graph. 2004, 9, 408–411. [Google Scholar]
- Deniz, L.G.; Buemi, M.E.; Julio, J.B.; Mejail, M. A new image quality index for objectively evaluating despeckling filtering in SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1297–1307. [Google Scholar]
- Jiang, G.Y.; Huang, D.J.; Wang, X. Overview on image quality assessment methods. J. Electron. Inf. Technol. 2010, 32, 219–226. [Google Scholar] [CrossRef]
- Amir, K.; Orly, Y.P. Quaternion structural similarity: A new quality index for color images. IEEE Trans. Image Process. 2012, 21, 1526–1536. [Google Scholar]
- Kede, M.; Hojatollah, Y.; Zeng, K.; Zhou, W. High dynamic range image compression by optimizing tone mapped image quality index. IEEE Trans. Image Process. 2015, 24, 3086–3097. [Google Scholar] [CrossRef]
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. SAR-SIFT: A SIFT-Like algorithm for SAR Images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 453–466. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.M.; Zhou, J.T.; Cheng, A.; Liu, X.M.; Tang, Y.Y. SIFT keypoint removal and injection via convex relaxation. IEEE Trans. Inf. Forensics Secur. 2016, 11, 1722–1735. [Google Scholar] [CrossRef]
- Fu, W.P.; Qing, C.; Liu, J. Matching and location of image object based on SIFT algorithm. Chin. J. Sci. Instrum. 2011, 6, 165–171. [Google Scholar]
- Philbin, J.; Chum, O.; Isard, M.; Sivic, J.; Zisserman, A. In object retrieval with large vocabularies and fast spatial matching. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 2015, 24, 381–395. [Google Scholar] [CrossRef]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. Comput. Graph. Forum 2010, 26, 214–226. [Google Scholar] [CrossRef]
- Chen, C.S.; Cheng, J.; Huang, Y.P. RANSAC-based DARCES: A new approach to fast automatic registration of partially overlapping range images. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 1229–1234. [Google Scholar] [CrossRef] [Green Version]
- Ascencio, C. Estimation of the Homography matrix to image stitching. In Applications of Hybrid Metaheuristic Algorithms for Image Processing; Oliva, D., Hinojosa, S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 205–230. [Google Scholar]
- Chen, H.Y.; Ren, Y.F.; Cao, J.Q.; Liu, W.P.; Liu, K. Multi-exposure fusion for welding region based on multi-scale transform and hybrid weight. Int. J. Adv. Manuf. Technol. 2019, 101, 105–117. [Google Scholar] [CrossRef]
- Weaver, P.P.E.; Billett, D. Environmental impacts of nodule, crust and sulphide mining: An overview. In Environmental Issues of Deep-Sea Mining: Impacts, Consequences and Policy Perspectives; Sharma, R., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 27–62. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | ||||||
|---|---|---|---|---|---|---|
| Reference | Be-Registered | Reference | Be-Registered | Reference | Be-Registered | |
| T1 | 8.42 | 9.13 | 49.87 | 49.28 | 0.03 | 0.02 |
| T2 | 7.48 | 7.61 | 48.96 | 48.43 | 0.12 | 0.15 |
| Mean | 7.95 | 8.37 | 49.42 | 48.86 | 0.08 | 0.09 |
| Algorithm | Group | Feature Point | Match Pair | ||
|---|---|---|---|---|---|
| Reference | Be-Registered | Rough | Uniformly | ||
| I-RANSAC [15] | T1 | 541 | 856 | 213 | 190 |
| T2 | 1069 | 1087 | 124 | 109 | |
| IIR | T1 | 478 | 671 | 197 | 180 |
| T2 | 716 | 783 | 98 | 91 | |
| Features | Group | ORB [6] | FAST [4] | SURF [5] | I-RANSA [12] | IIR |
|---|---|---|---|---|---|---|
| Matching accuracy | T1 | 87.76 | 84.71 | 87.12 | 89.20 | 91.37 |
| T2 | 86.33 | 84.78 | 86.42 | 87.90 | 92.86 | |
| Mean | 87.04 | 84.74 | 86.77 | 88.55 | 92.12 | |
| Matching time | T1 | 2.58 | 2.17 | 2.35 | 2.63 | 2.43 |
| T2 | 2.89 | 2.53 | 2.78 | 2.94 | 2.88 | |
| Mean | 2.74 | 2.35 | 2.57 | 2.79 | 2.67 |
| Features | Group | ORB [6] | FAST [4] | SURF [5] | I-RANSAC [12] | IIR |
|---|---|---|---|---|---|---|
| Matching | 5 | 87.13 ± 1.74 | 85.42 ± 2.52 | 86.96 ± 1.61 | 88.78 ± 1.51 | 89.34 ± 1.37 |
| 10 | 88.34 ± 1.81 | 88.10 ± 2.04 | 88.27 ± 1.75 | 89.75 ± 1.28 | 91.26 ± 1.04 | |
| Accuracy | 15 | 87.92 ± 1.56 | 87.68 ± 1.63 | 87.71 ± 1.38 | 88.96 ± 1.34 | 91.54 ± 1.16 |
| 20 | 88.12 ± 1.18 | 87.83 ± 1.34 | 88.04 ± 0.96 | 89.41 ± 0.92 | 92.17 ± 0.87 |
| Group | ||||||
|---|---|---|---|---|---|---|
| Reference | Be-Registered | Reference | Be-Registered | Reference | Be-Registered | |
| T3 | 0.49 | 0.37 | 55.23 | 55.44 | 0.01 | 0.04 |
| T4 | 0.62 | 0.57 | 57.43 | 57.97 | 0.12 | 0.09 |
| Mean | 0.56 | 0.47 | 56.33 | 56.71 | 0.07 | 0.07 |
| Algorithm | Group | Feature Point | Match Pair | ||
|---|---|---|---|---|---|
| Reference | Be-Registered | Rough | Uniformly | ||
| I-RANSAC [15] | T3 | 2103 | 2269 | 740 | 690 |
| T4 | 2344 | 2648 | 816 | 735 | |
| IIR | T3 | 1686 | 1761 | 623 | 586 |
| T4 | 1851 | 2096 | 676 | 628 | |
| Features | Group | ORB [6] | FAST [4] | SURF [5] | I-RANSAC [12] | IIR |
|---|---|---|---|---|---|---|
| Matching accuracy | T3 | 90.10 | 87.46 | 91.13 | 93.24 | 94.06 |
| T4 | 87.62 | 85.37 | 88.36 | 90.07 | 92.90 | |
| Mean | 88.86 | 86.42 | 89.75 | 91.66 | 93.48 | |
| Matching time | T3 | 2.39 | 2.21 | 2.33 | 2.51 | 2.42 |
| T4 | 2.46 | 2.28 | 2.41 | 2.61 | 2.49 | |
| Mean | 2.43 | 2.25 | 2.37 | 2.56 | 2.46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Gao, F.; Yu, J.; Yu, X.; Yang, Z. Underwater Image Mosaic Algorithm Based on Improved Image Registration. Appl. Sci. 2021, 11, 5986. https://doi.org/10.3390/app11135986
Zhao Y, Gao F, Yu J, Yu X, Yang Z. Underwater Image Mosaic Algorithm Based on Improved Image Registration. Applied Sciences. 2021; 11(13):5986. https://doi.org/10.3390/app11135986
Chicago/Turabian StyleZhao, Yinsen, Farong Gao, Jun Yu, Xing Yu, and Zhangyi Yang. 2021. "Underwater Image Mosaic Algorithm Based on Improved Image Registration" Applied Sciences 11, no. 13: 5986. https://doi.org/10.3390/app11135986
APA StyleZhao, Y., Gao, F., Yu, J., Yu, X., & Yang, Z. (2021). Underwater Image Mosaic Algorithm Based on Improved Image Registration. Applied Sciences, 11(13), 5986. https://doi.org/10.3390/app11135986