
DC-DC Zeta Power Converter: Ramp Compensation Control Design and Stability Analysis


Abstract
:1. Introduction
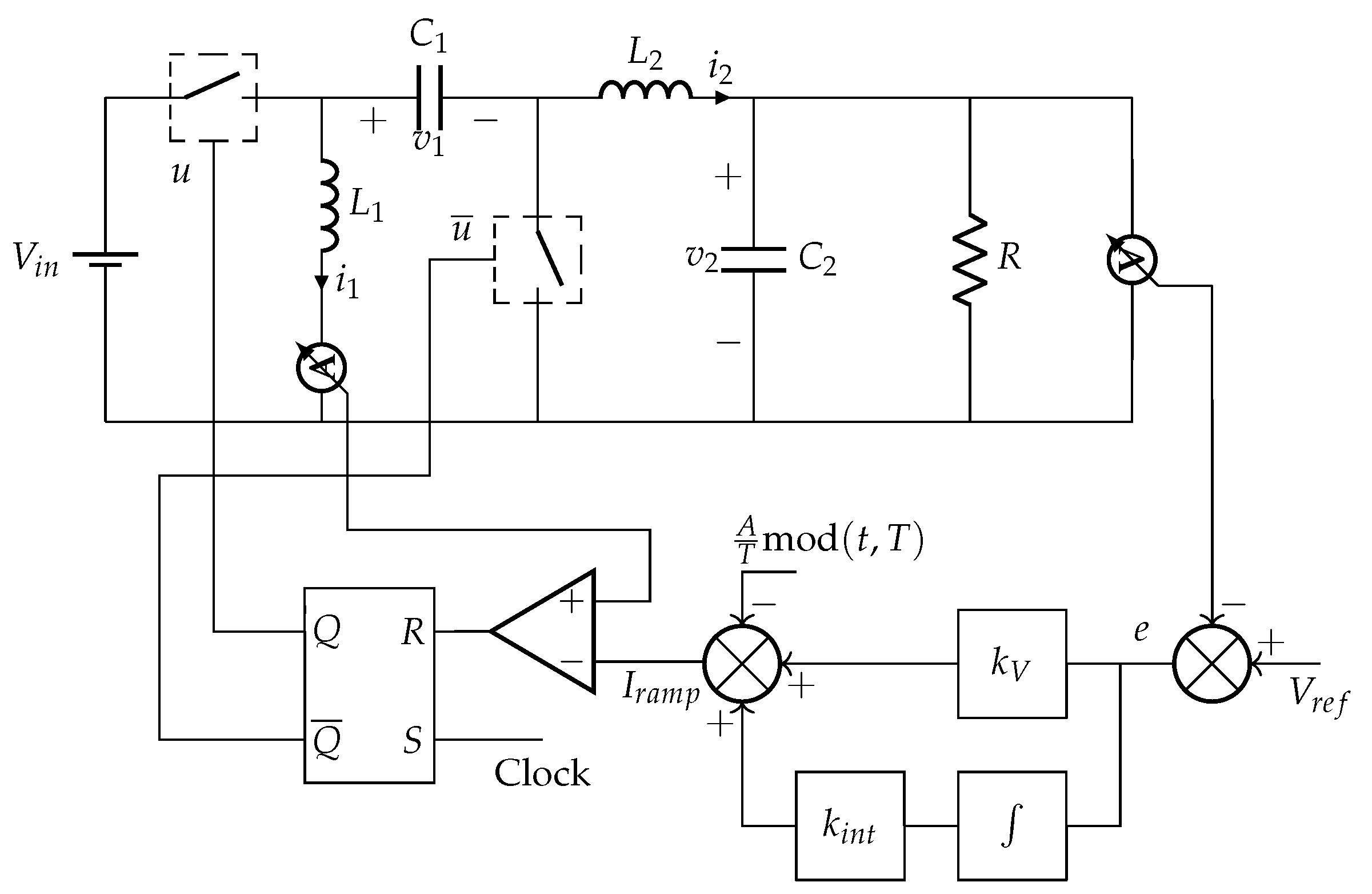
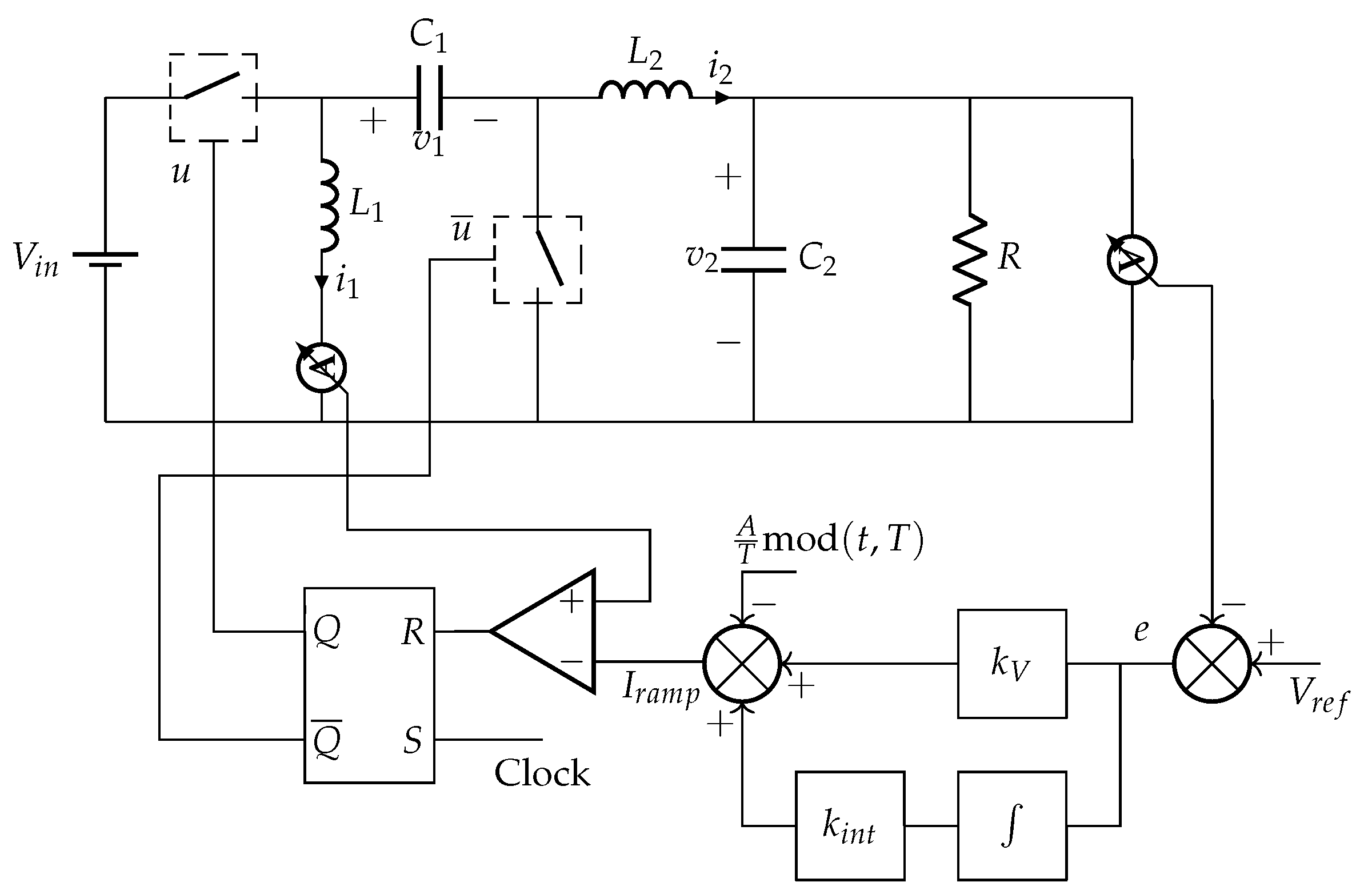
2. Synchronous ZETA Converter
2.1. Mathematical Model
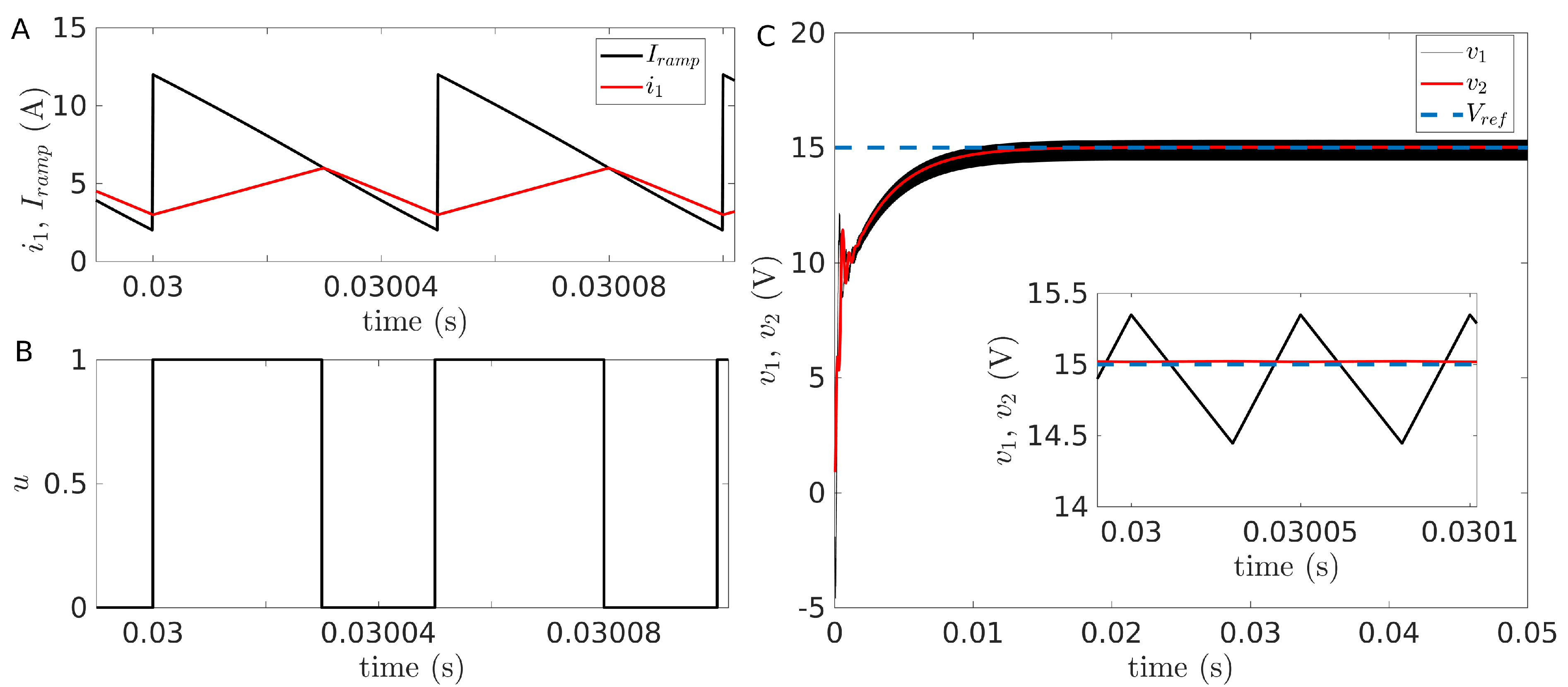
2.2. Control via Ramp Compensation
3. Stability Analysis
3.1. Floquet Multipliers
- If for all i, then the orbit is stable.
- If at least one , the orbit is unstable.
- Find the state at the beginning of the periodic orbit and the duty cycle d that fulfill the following conditions
- Obtain the Floquet multipliers as the eigenvalues of M.
3.2. Lyapunov Exponents
- If , the attractor is a stable fixed point.
- If , the attractor is a stable periodic (or quasi-periodic) orbit.
- If , the attractor is chaotic.
- The first one corresponds to the transition of the switch from ON to OFF position, which is given by the indicator functionHere, the fields , , and the states do not change their values abruptly, hence the impact function is trivially
- The second discontinuous event occurs when the ramp resets to 0 at the end of every cycle, or equivalently when which corresponds to the indicator functionSpecial care must be taken at this point. If the duty cycle is not saturated, then at each T-cycle and . However, it might happen that the cycle is saturated and the switch remained in the ON position during the whole period, in which case . In both cases, changes its value abruptly to a constant value , hence the impact function is:which leads toand
- Evolve the extended system:in the interval with randomly chosen initial conditions for , such that .
- When , calculate and store
- Set and renormalize .
- Repeat Steps 1–4 for a sufficiently large number of steps N.
- Calculate the maximal Lyapunov exponent as:
4. Results
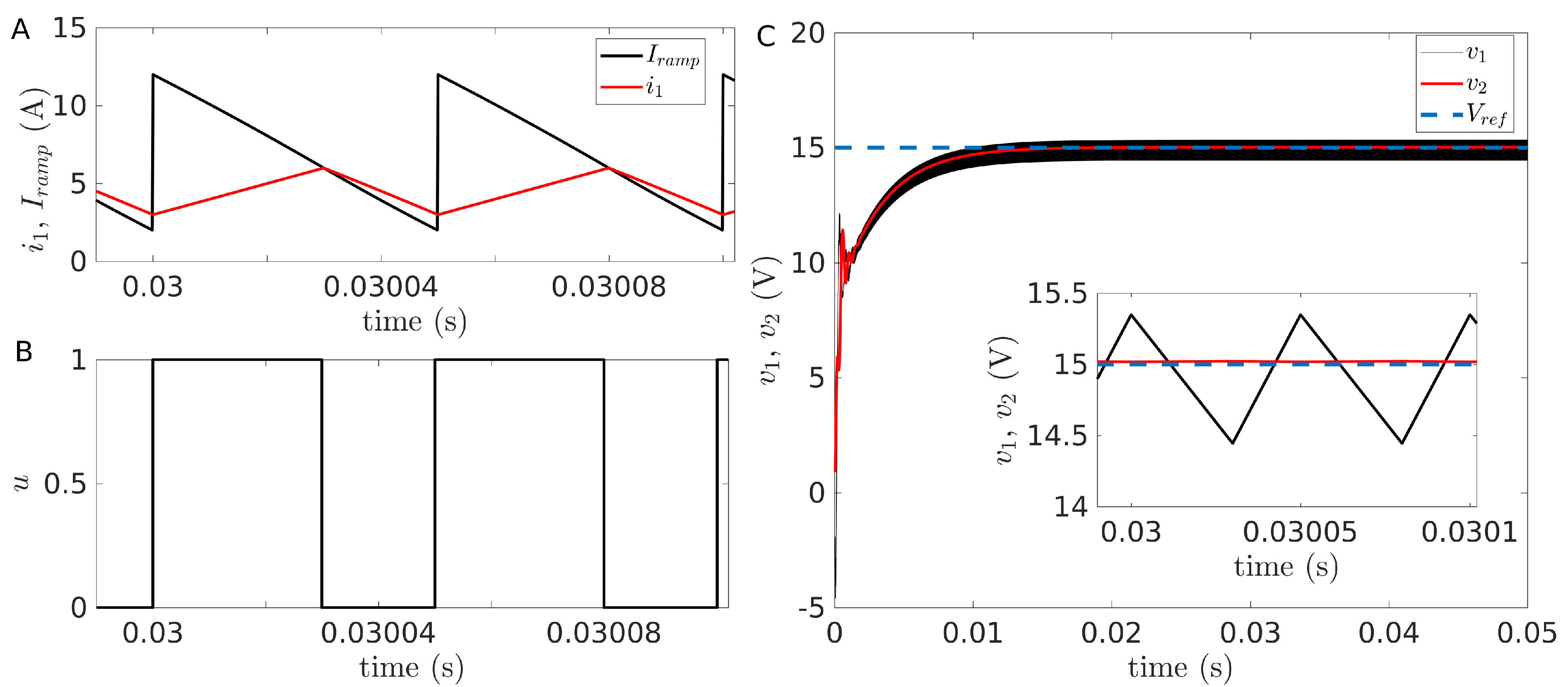
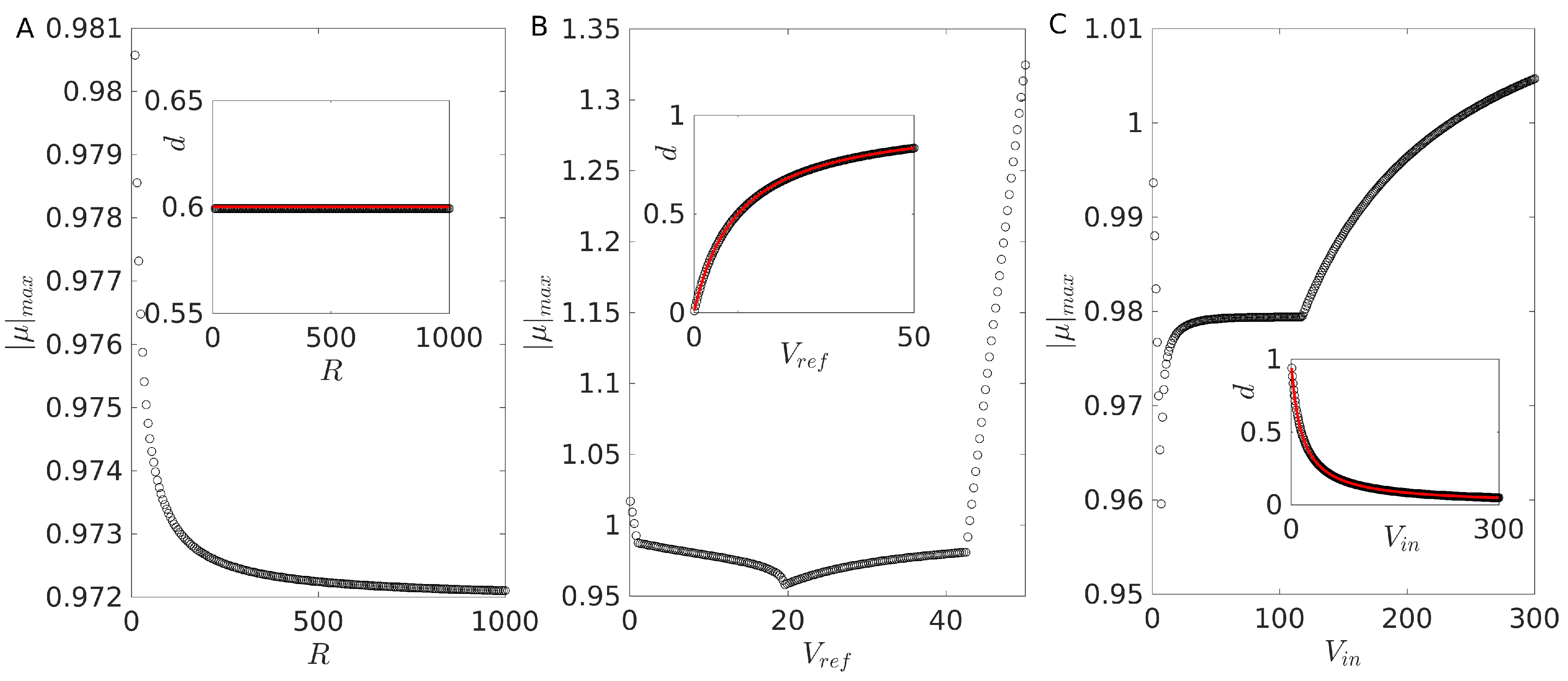
4.1. Ramp Compensation Design
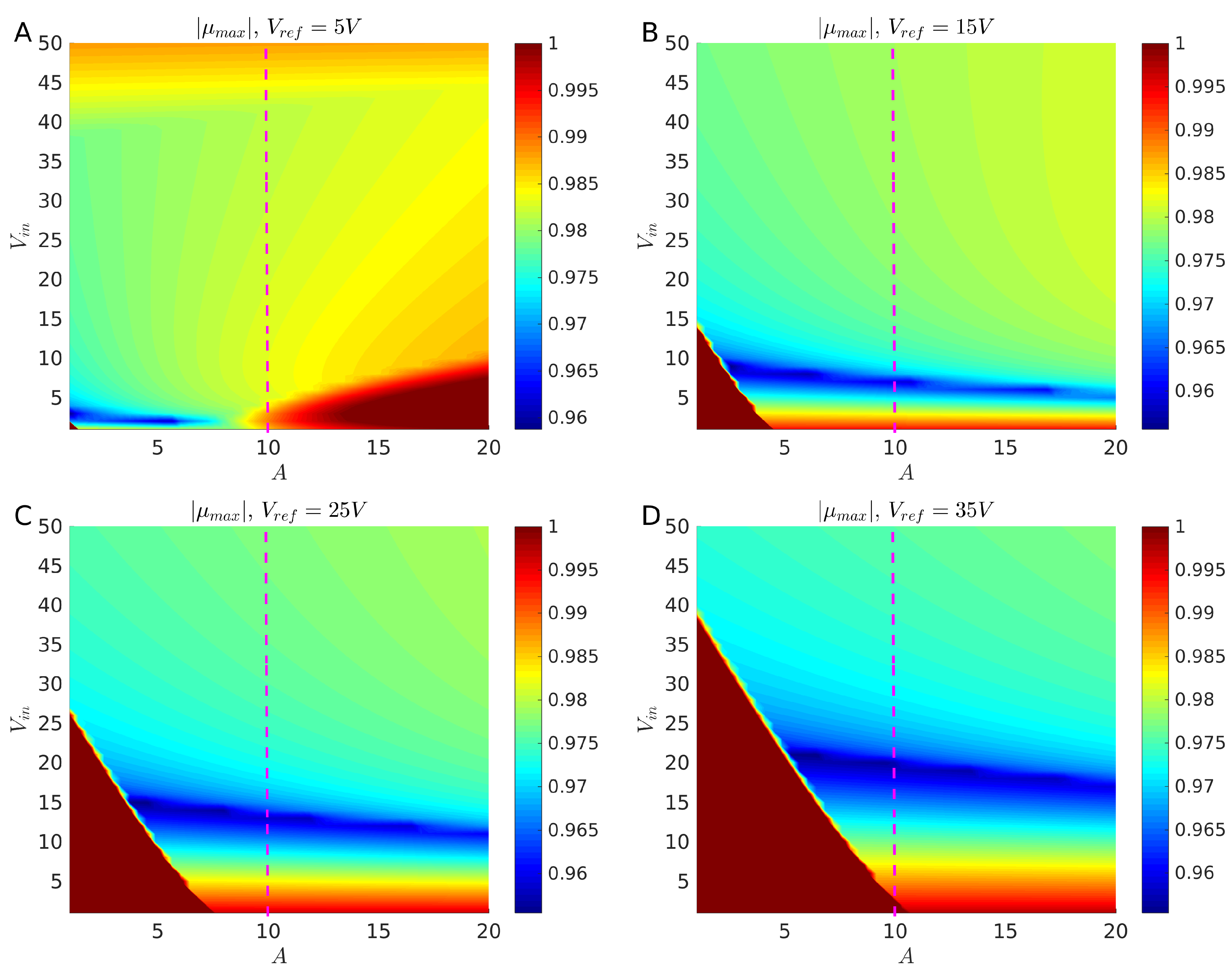
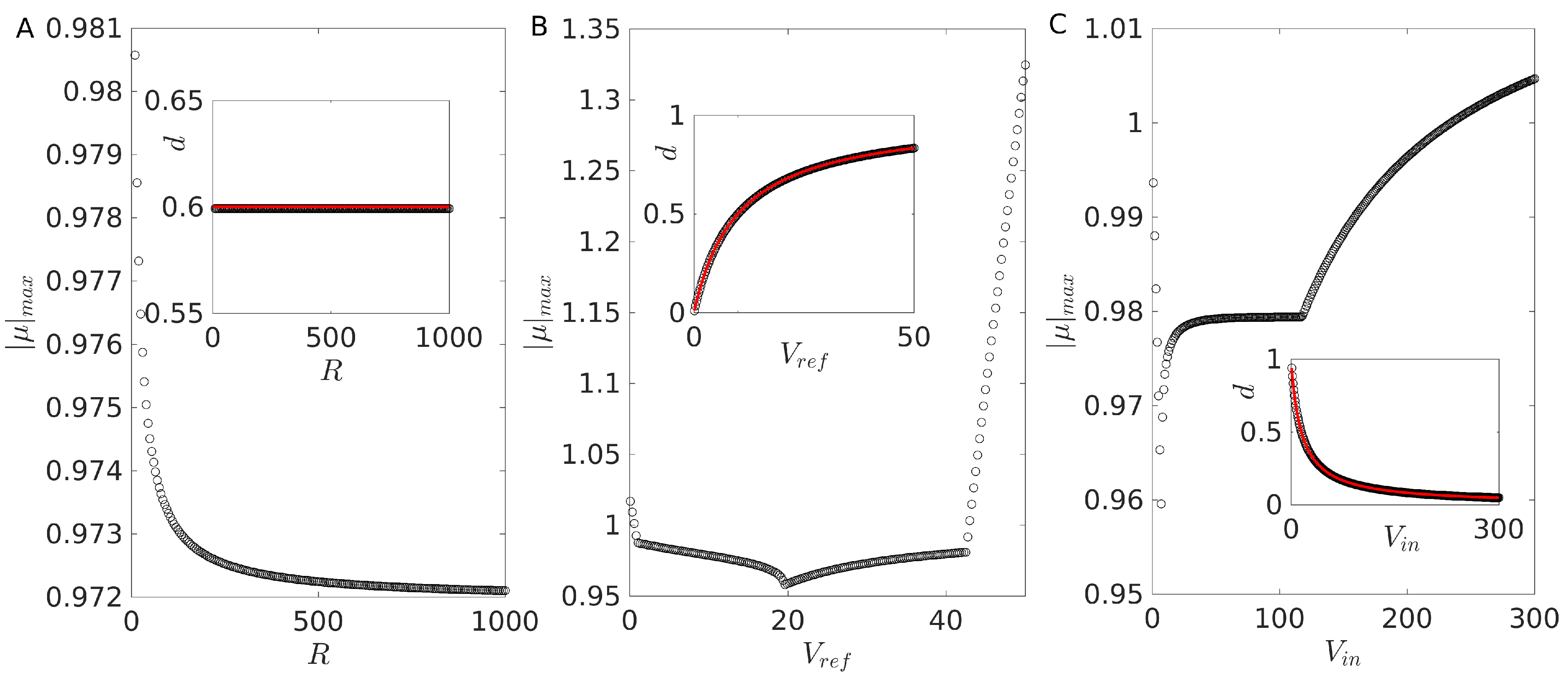
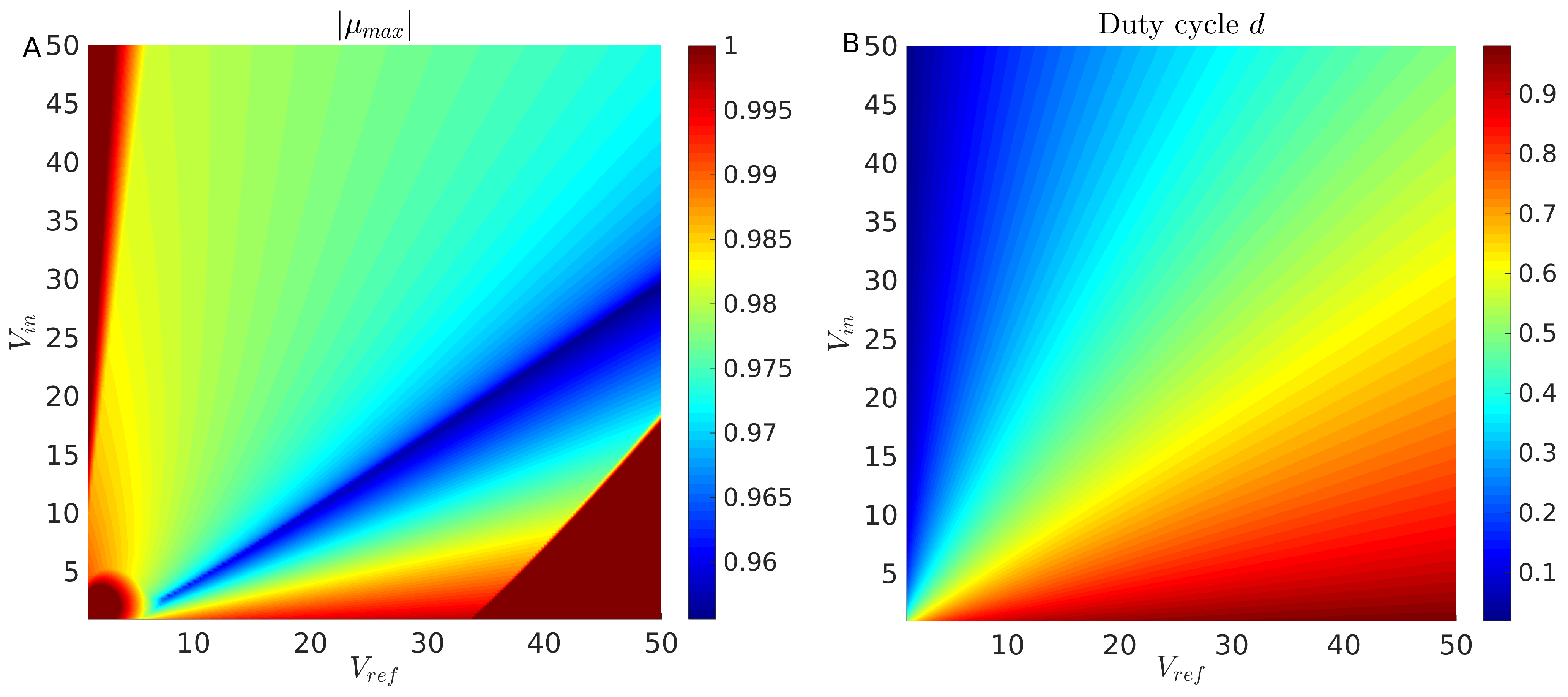
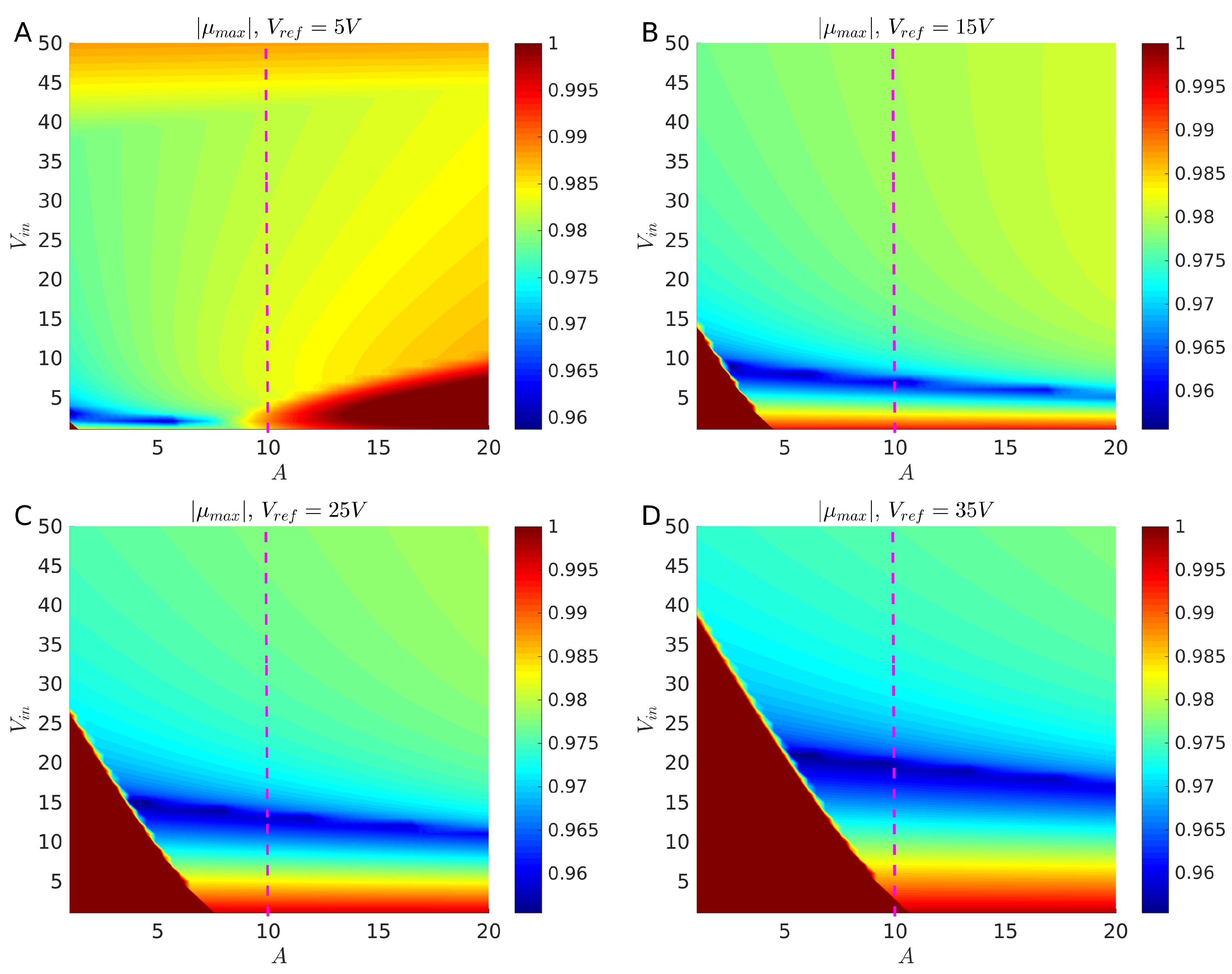
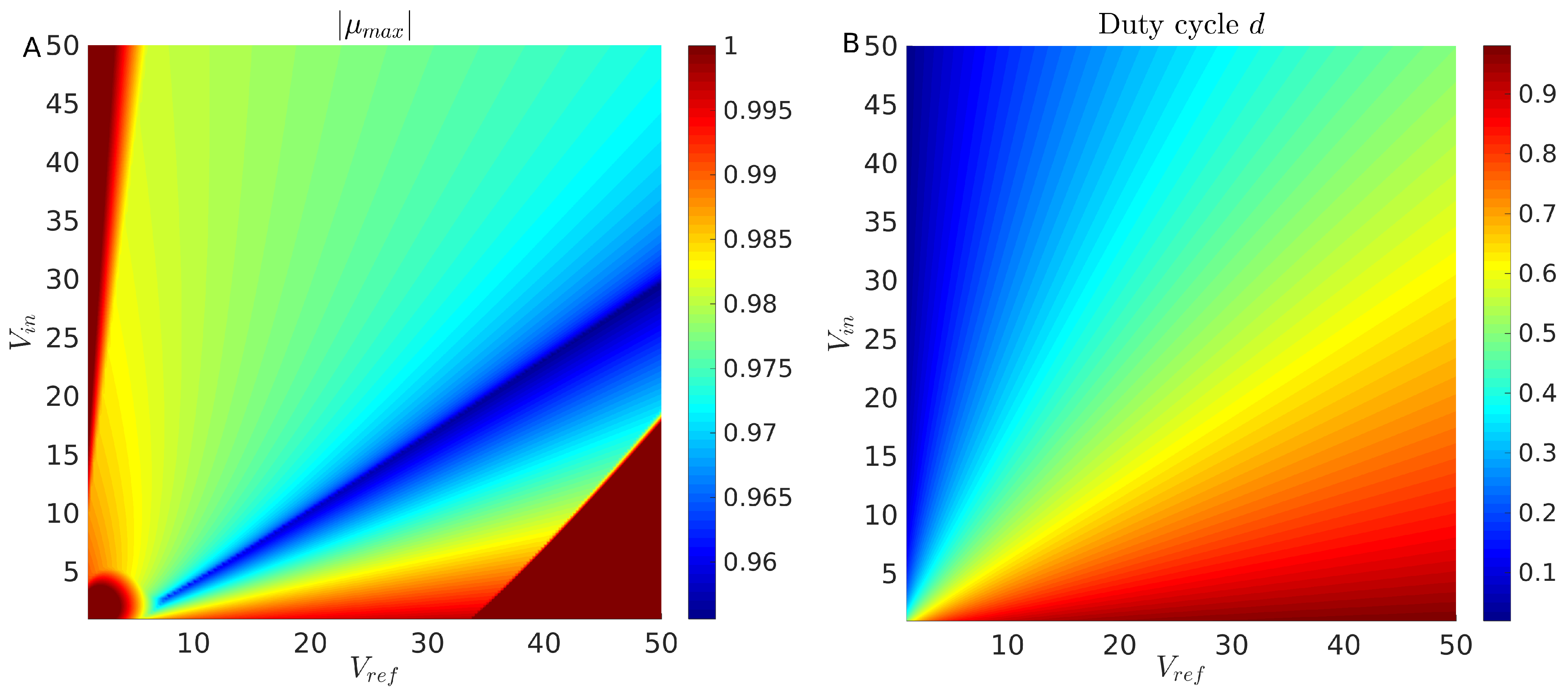
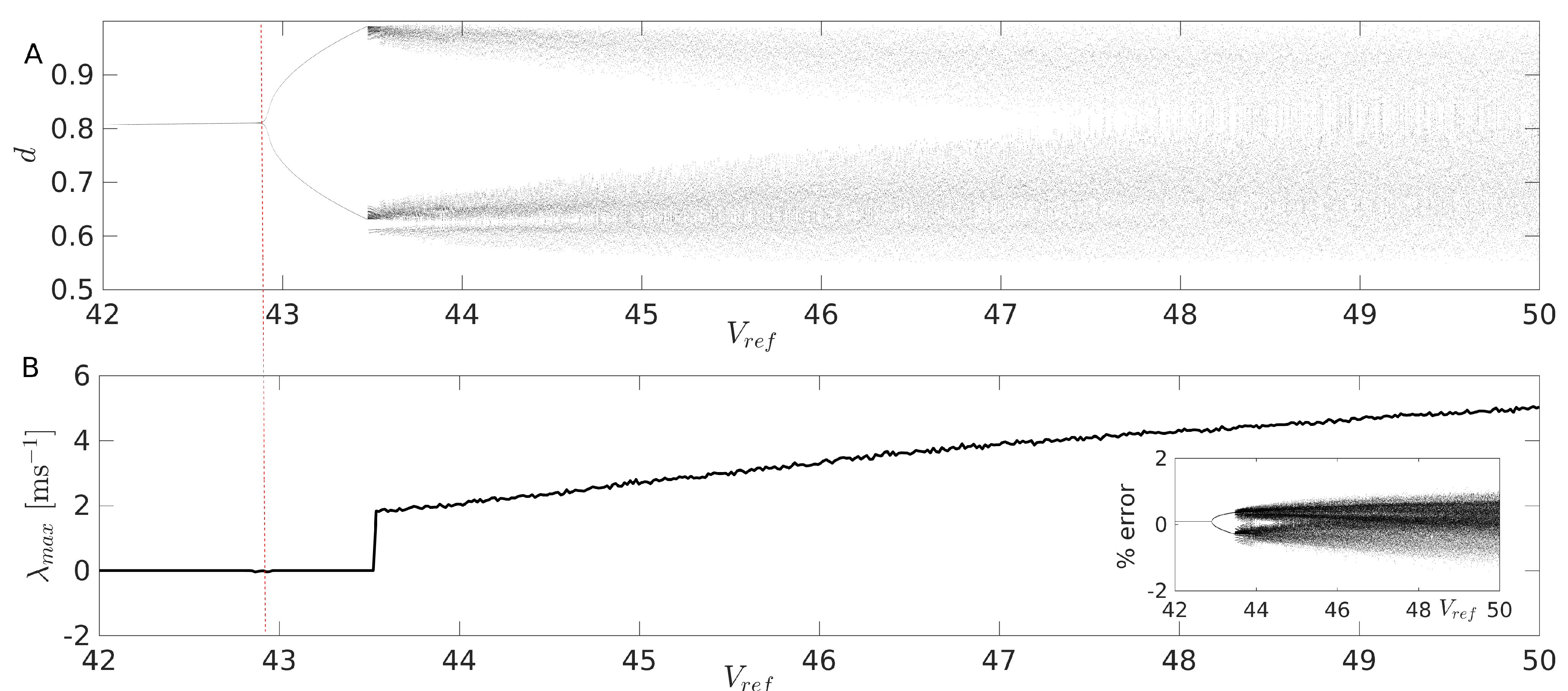
4.2. Stability Regions
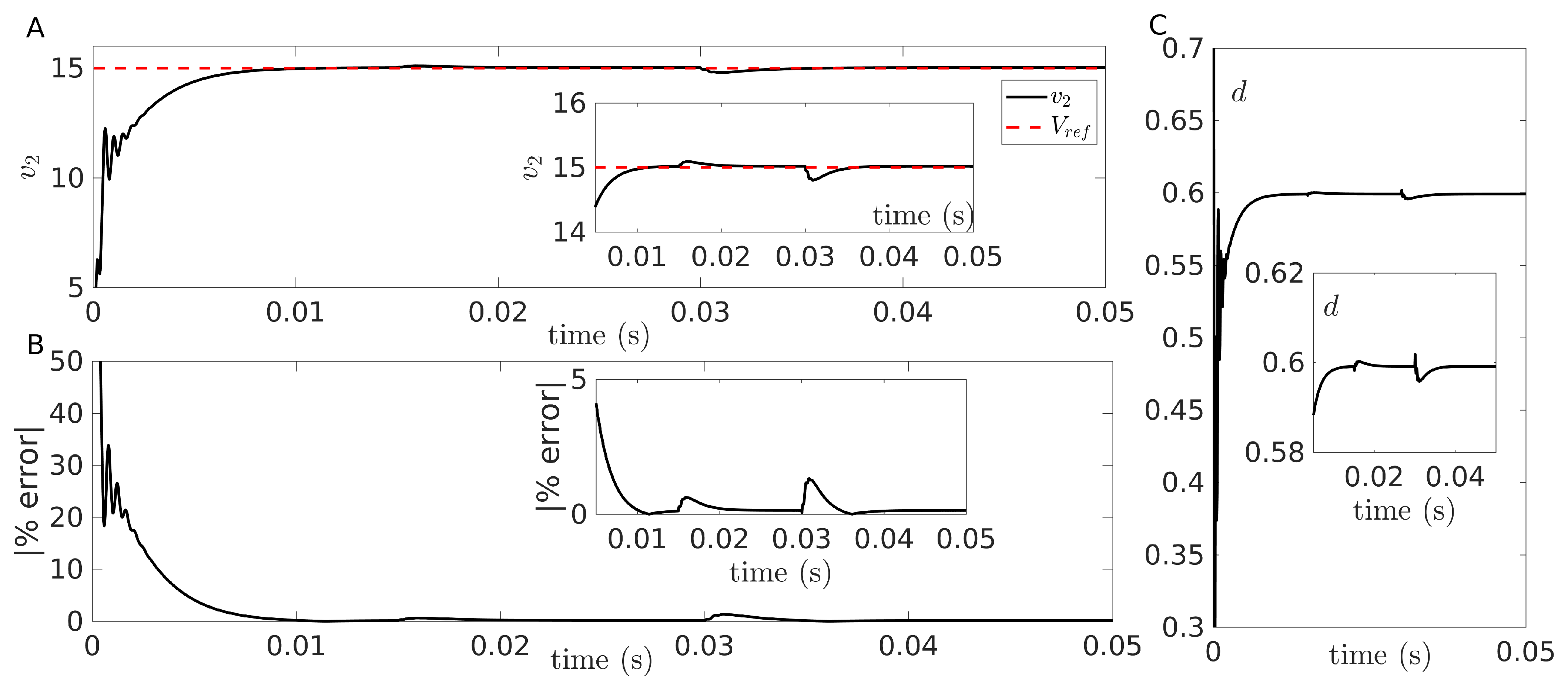
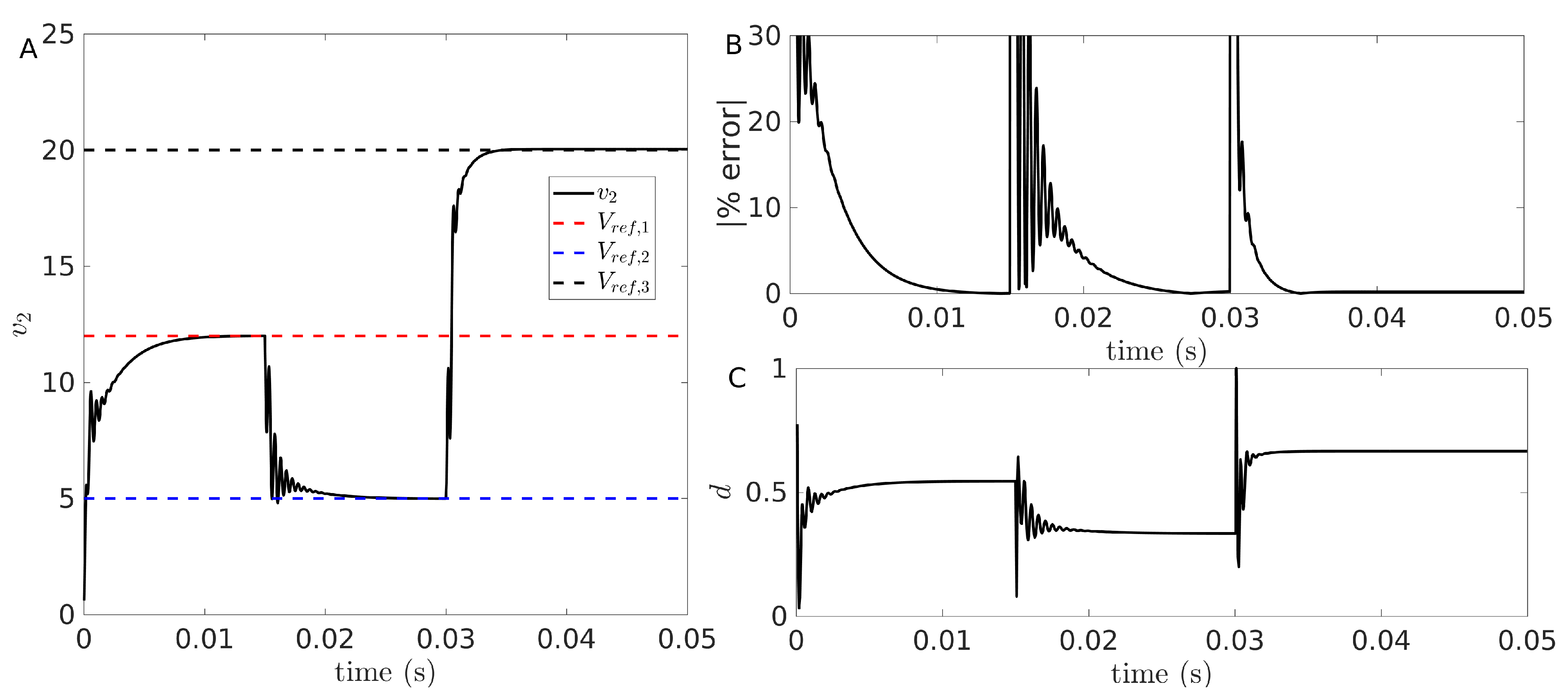
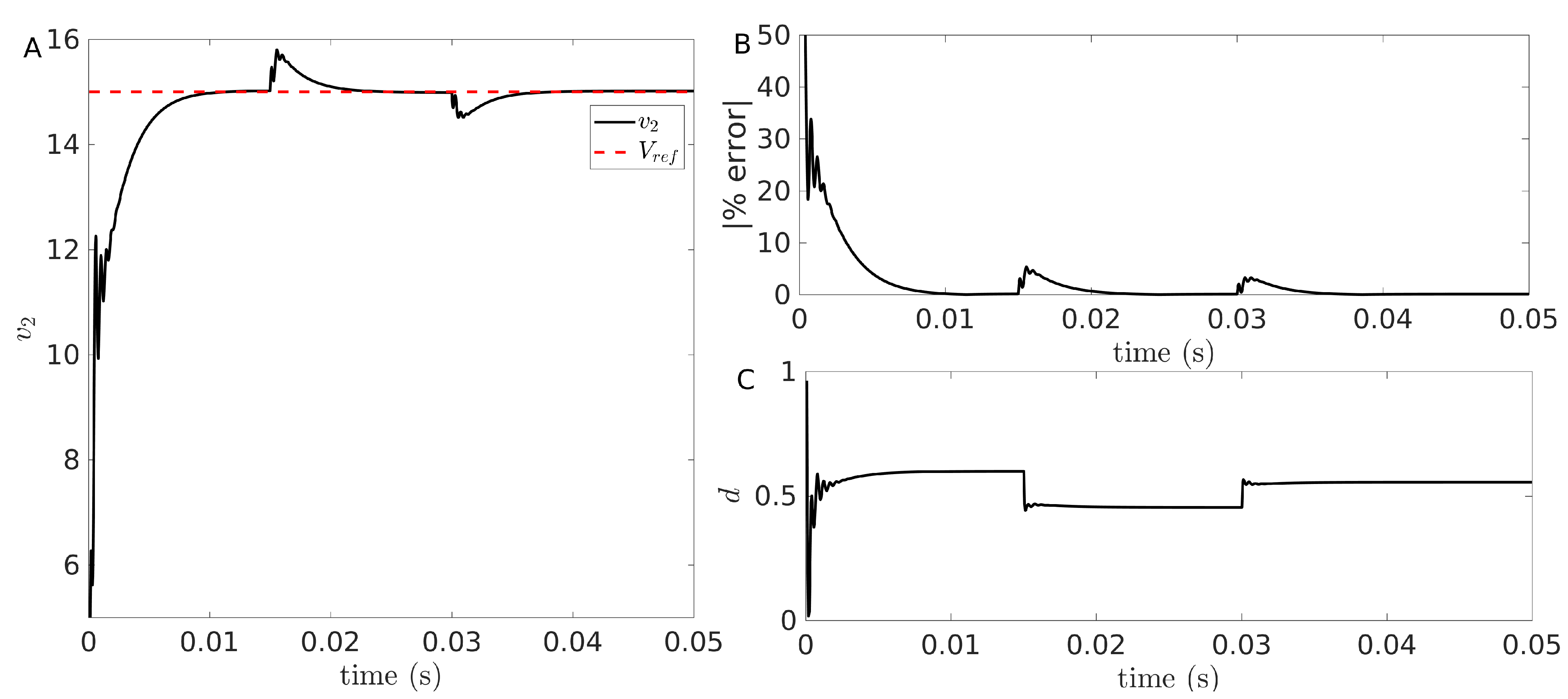
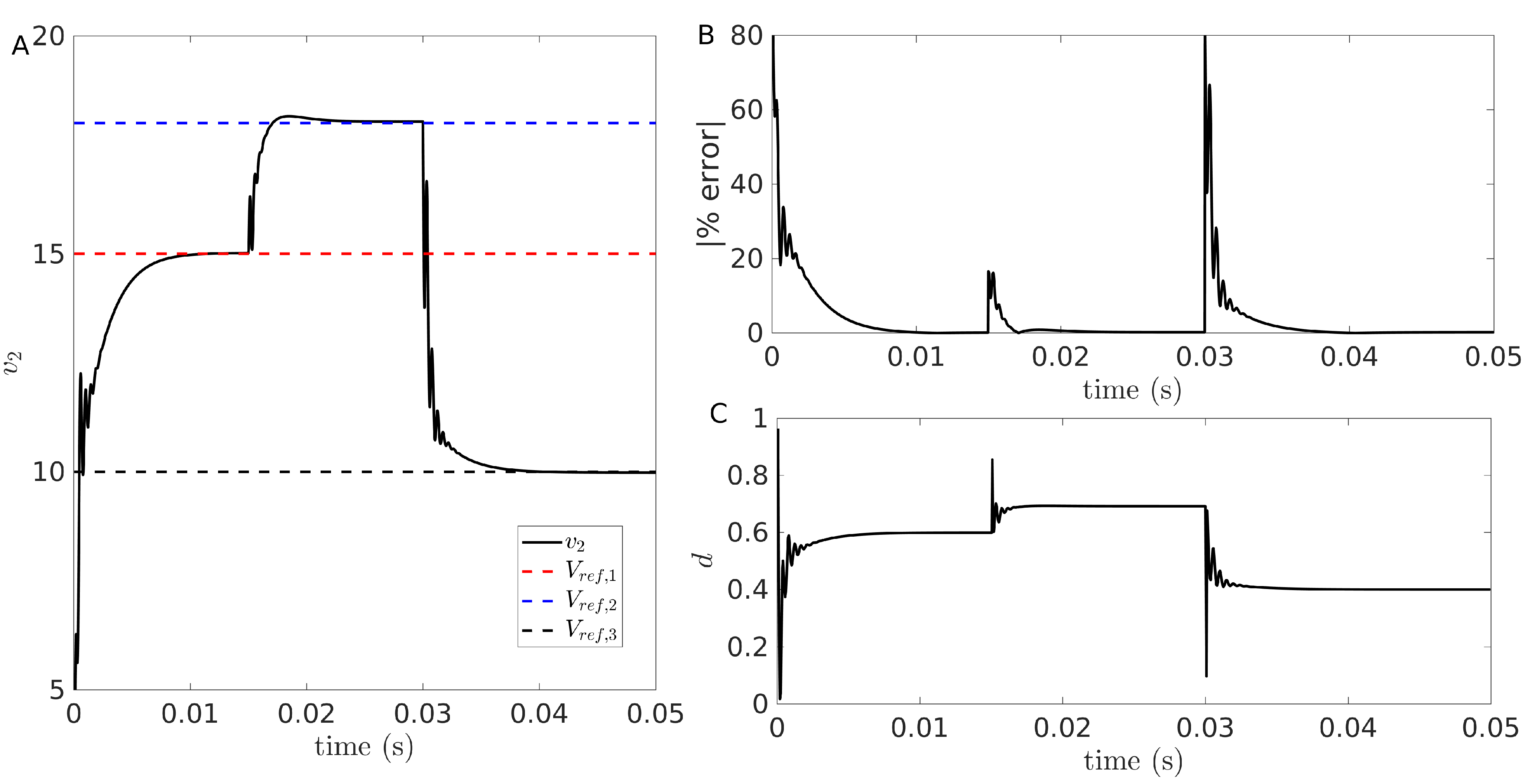
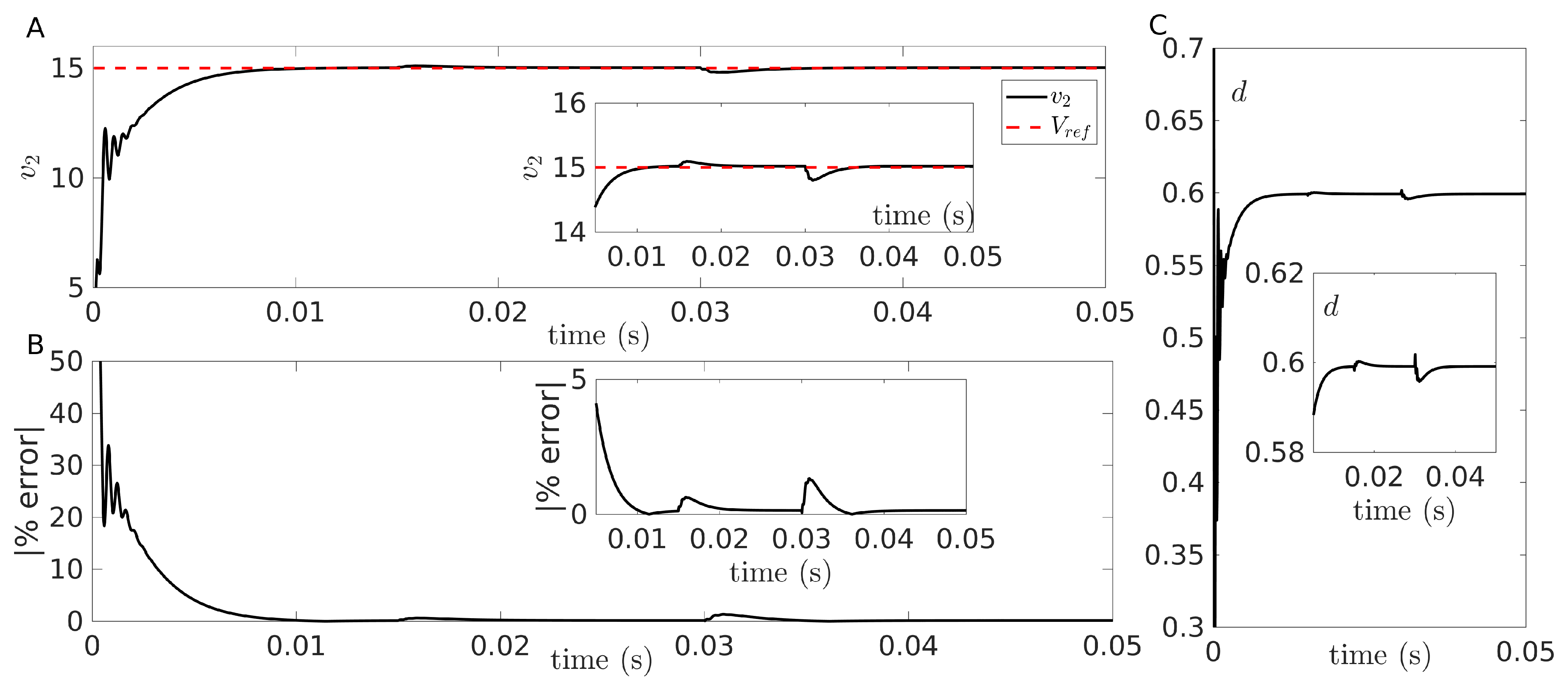
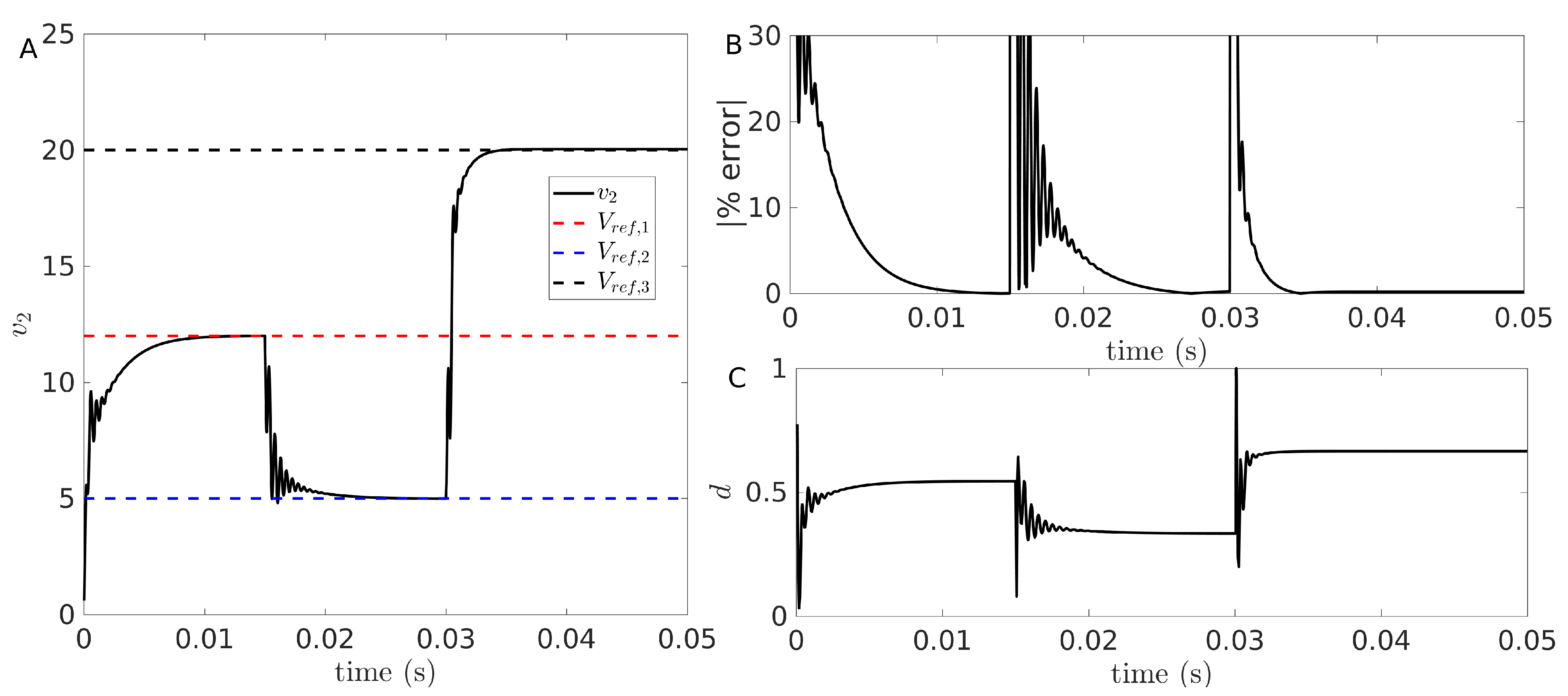
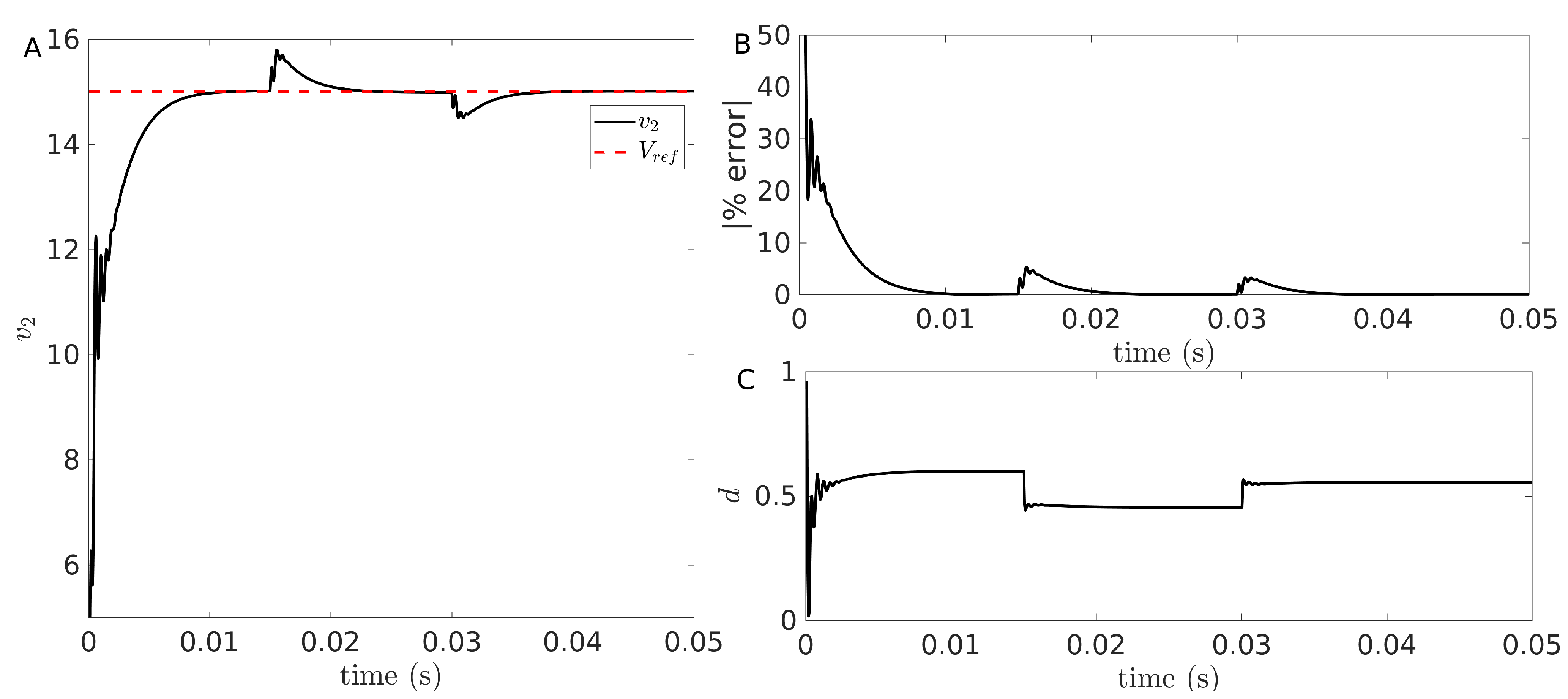
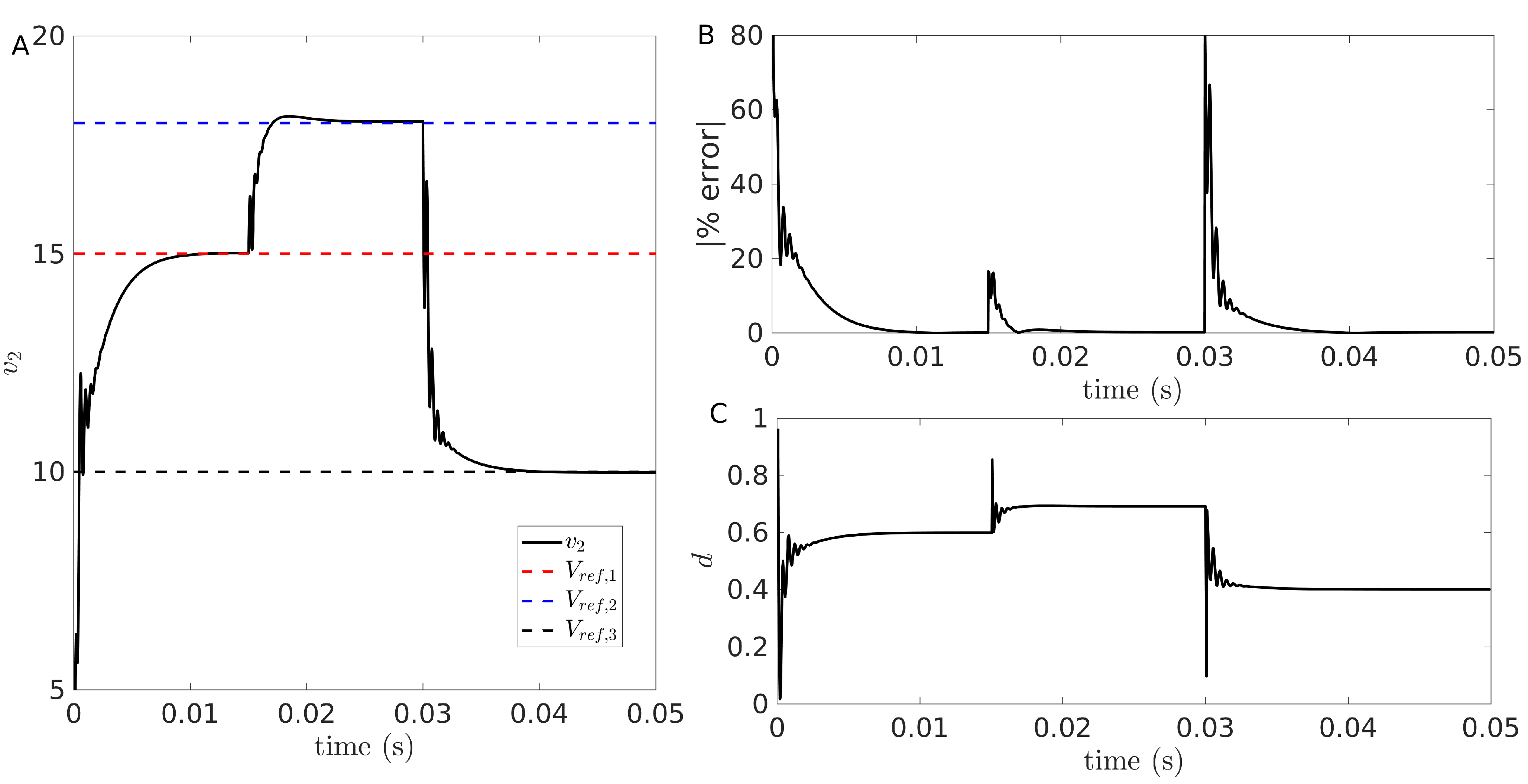
4.3. Disturbance Rejection
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Ioinovici, A. Power Electronics and Energy Conversion Systems: Fundamentals and Hard-Switching Converters; Wiley: Hoboken, NJ, USA, 2013; Volume 1. [Google Scholar]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Kumar, D.; Gupta, R.A.; Tiwari, H. Front-end zeta converter based BLDCM drive for efficient reduction of commutation current ripple using notch-filter. Int. Trans. Electr. Energy Syst. 2020, 30, e12508. [Google Scholar] [CrossRef]
- Singh, B.; Singh, S. Single-phase power factor controller topologies for permanent magnet brushless DC motor drives. IET Power Electron. 2010, 3, 147–175. [Google Scholar] [CrossRef]
- de Britto, J.R.; Junior, A.E.D.; de Freitas, L.C.; Farias, V.J.; Coelho, E.A.; Vieira, J.B. Zeta DC/DC converter used as led lamp drive. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–7. [Google Scholar]
- Shrivastava, A.; Singh, B. Zeta converter based power supply for HB-LED lamp with universal input. In Proceedings of the 2012 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Bengaluru, India, 16–19 December 2012; pp. 1–5. [Google Scholar]
- Kushwaha, R.; Singh, B. UPF-isolated zeta converter-based battery charger for electric vehicle. IET Electr. Syst. Transp. 2019, 9, 103–112. [Google Scholar] [CrossRef]
- Sharma, U.; Singh, B. An Onboard Bidirectional Charger for Light Electric Vehicles Using Interleaved ZETA Converter. In Proceedings of the 2020 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 9–11 December 2020; pp. 1–6. [Google Scholar]
- Zhang, H.; Zhang, Y.; Ma, X. Distortion behavior analysis of general pulse-width modulated zeta PFC converter operating in continuous conduction mode. IEEE Trans. Power Electron. 2012, 27, 4212–4223. [Google Scholar] [CrossRef]
- Sebastián, J.; Lamar, D.G.; de Azpeitia, M.A.P.; Rodríguez, M.; Fernández, A. The voltage-controlled compensation ramp: A waveshaping technique for power factor correctors. IEEE Trans. Ind. Appl. 2009, 45, 1016–1027. [Google Scholar] [CrossRef]
- Peres, A.; Martins, D.C.; Barbi, I. Zeta converter applied in power factor correction. In Proceedings of the 1994 Power Electronics Specialist Conference (PESC’94), Taiwan, China, 20–25 June 1994; Volume 2, pp. 1152–1157. [Google Scholar]
- Singh, S.; Singh, B.; Bhuvaneswari, G.; Bist, V. Power factor corrected zeta converter based improved power quality switched mode power supply. IEEE Trans. Ind. Electron. 2015, 62, 5422–5433. [Google Scholar] [CrossRef]
- Sudhakarababu, C.; Veerachary, M. Zeta converter for power factor correction and voltage regulation. In Proceedings of the 2004 IEEE Region 10 Conference (TENCON 2004), Chiang Mai, Thailand, 21–24 November 2004; Volume 500, pp. 61–64. [Google Scholar]
- Woranetsuttikul, K.; Pinsuntia, K.; Jumpasri, N.; Nilsakorn, T.; Khan-ngern, W. Comparison on performance between synchronous single-ended primary-inductor converter (SEPIC) and synchronous ZETA converter. In Proceedings of the 2014 International Electrical Engineering Congress (iEECON), Pattaya, Thailand, 19–21 March 2014; pp. 1–4. [Google Scholar]
- Manohar, J.; Rajesh, K. A comparative study on DC motor drive fed by synchronous SEPIC converter and synchronous zeta converter. In Proceedings of the 2016 International Conference on Computation of Power, Energy Information and Commuincation (ICCPEIC), Melmaruvathur, India, 20–21 April 2016; pp. 505–510. [Google Scholar]
- Manohar, J.; Rajesh, K. Speed control of BLDC motor using PV powered synchronous Zeta converter. In Proceedings of the 2016 International Conference on Computation of Power, Energy Information and Commuincation (ICCPEIC), Melmaruvathur, India, 20–21 April 2016; pp. 542–548. [Google Scholar]
- Shashikumari, J.; Ramya, N. Design of Synchronous SEPIC and Synchronous Zeta Converter for Stand-Alone Photovoltaic System. IJRSI 2016, 3, 149–155. [Google Scholar]
- Vuthchhay, E.; Bunlaksananusorn, C. Modeling and control of a Zeta converter. In Proceedings of the 2010 International Power Electronics Conference (ECCE ASIA), Sapporo, Japan, 21–24 June 2010; pp. 612–619. [Google Scholar]
- Garg, M.M.; Hote, Y.V.; Pathak, M.K. PI controller design of a dc-dc Zeta converter for specific phase margin and cross-over frequency. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Kota Kinabalu, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Babu, P.R.; Prasath, S.R.; Kiruthika, R. Simulation and performance analysis of CCM Zeta converter with PID controller. In Proceedings of the 2015 International Conference on Circuits, Power and Computing Technologies (ICCPCT 2015), Nagercoil, India, 19–20 March 2015; pp. 1–7. [Google Scholar]
- Viero, R.C.; dos Reis, F.B.; dos Reis, F.S. Computational model of the dynamic behavior of the ZETA converter in discontinuous conduction mode. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 299–303. [Google Scholar]
- Izadian, A.; Khayyer, P. Complementary adaptive control of Zeta converters. In Proceedings of the 2013 International Electric Machines & Drives Conference, Nuremberg, Germany, 29–30 October 2013; pp. 1338–1342. [Google Scholar]
- Moaveni, B.; Abdollahzadeh, H.; Mazoochi, M. Adjustable output voltage Zeta converter using neural network adaptive model reference control. In Proceedings of the 2nd International Conference on Control, Instrumentation and Automation, Shiraz, Iran, 27–29 December 2011; pp. 552–557. [Google Scholar]
- Sarkawi, H.; Jali, M.H.; Izzuddin, T.A.; Dahari, M. Dynamic model of Zeta converter with full-state feedback controller implementation. Int. J. Res. Eng. Technol. 2013, 2, 34–43. [Google Scholar]
- Sarkawi, H.; Ohta, Y. Uncertain DC-DC zeta converter control in convex polytope model based on LMI approach. Int. J. Power Electron. Drive Syst. 2018, 9, 829. [Google Scholar] [CrossRef]
- Sarkawi, H.; Ohta, Y.; Rapisarda, P. On the switching control of the DC–DC zeta converter operating in continuous conduction mode. IET Control Theory Appl. 2021, 15, 1185–1198. [Google Scholar] [CrossRef]
- Mahdavi, J.; Emaadi, A.; Bellar, M.; Ehsani, M. Analysis of power electronic converters using the generalized state-space averaging approach. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 767–770. [Google Scholar] [CrossRef]
- El Aroudi, A.; Benadero, L.; Toribio, E.; Olivar, G. Hopf bifurcation and chaos from torus breakdown in a PWM voltage-controlled DC-DC boost converter. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1999, 46, 1374–1382. [Google Scholar] [CrossRef]
- Banerjee, S.; Verghese, G.C. Nonlinear Phenomena in Power Electronics; IEEE: Piscataway Township, NJ, USA, 1999. [Google Scholar]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides: Control Systems; Springer: Berlin/Heidelberg, Germany, 2013; Volume 18. [Google Scholar]
- El Aroudi, A.; Giaouris, D.; Iu, H.H.C.; Hiskens, I.A. A review on stability analysis methods for switching mode power converters. IEEE J. Emerg. Sel. Top. Circuits Syst. 2015, 5, 302–315. [Google Scholar] [CrossRef]
- Giaouris, D.; Elbkosh, A.; Banerjee, S.; Zahawi, B.; Pickert, V. Control of switching circuits using complete-cycle solution matrices. In Proceedings of the 2006 IEEE International Conference on Industrial Technology, Mumbai, India, 15–17 December 2006; pp. 1960–1965. [Google Scholar] [CrossRef]
- Giaouris, D.; Maity, S.; Banerjee, S.; Pickert, V.; Zahawi, B. Application of Filippov method for the analysis of subharmonic instability in dc–dc converters. Int. J. Circuit Theory Appl. 2009, 37, 899–919. [Google Scholar] [CrossRef] [Green Version]
- Muñoz, J.G.; Angulo, F.; Angulo-Garcia, D. Zero Average Surface Controlled Boost-Flyback Converter. Energies 2021, 14, 57. [Google Scholar] [CrossRef]
- Muñoz, J.G.; Angulo, F.; Angulo-Garcia, D. Designing a hysteresis band in a boost flyback converter. Mech. Syst. Signal Process. 2021, 147, 107080. [Google Scholar] [CrossRef]
- El Aroudi, A.; Haroun, R.; Al-Numay, M.S.; Calvente, J.; Giral, R. Fast-Scale Stability Analysis of a DC-DC Boost Converter with a Constant Power Load. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 549–558. [Google Scholar] [CrossRef]
- Angulo, F.; Olivar, G.; Taborda, A. Continuation of periodic orbits in a ZAD-strategy controlled buck converter. Chaos Solitons Fractals 2008, 38, 348–363. [Google Scholar] [CrossRef]
- Daho, I.; Giaouris, D.; Zahawi, B.; Picker, V.; Banerjee, S. Stability analysis and bifurcation control of hysteresis current controlled Cuk converter using Filippov’s method. In Proceedings of the 4th IET International Conference on Power Electronics, Machines and Drives (PEMD 2008), York, UK, 2–4 April 2008. [Google Scholar]
- El Aroudi, A.; Benadero, L.; Toribio, E.; Machiche, S. Quasiperiodicity and chaos in the DC–DC buck–boost converter. Int. J. Bifurc. Chaos 2000, 10, 359–371. [Google Scholar] [CrossRef]
- Lim, Y.H.; Hamill, D.C. Problems of computing Lyapunov exponents in power electronics. In Proceedings of the 1999 IEEE International Symposium on Circuits and Systems (ISCAS), Orlando, FL, USA, 30 May–2 June 1999; Volume 5, pp. 297–301. [Google Scholar]
- Zamani, N.; Ataei, M.; Niroomand, M. Analysis and control of chaotic behavior in boost converter by ramp compensation based on Lyapunov exponents assignment: Theoretical and experimental investigation. Chaos Solitons Fractals 2015, 81, 20–29. [Google Scholar] [CrossRef]
- Liqing, W.; Xueye, W. Computation of Lyapunov exponents for a current-programmed buck boost converter. In Proceedings of the 2nd International Workshop on Autonomous Decentralized System, Beijing, China, 7 November 2002; pp. 273–276. [Google Scholar] [CrossRef]
- Muñoz, J.G.; Gallo, G.; Angulo, F.; Osorio, G. Slope Compensation Design for a Peak Current-Mode Controlled Boost-Flyback Converter. Energies 2018, 11, 3000. [Google Scholar] [CrossRef] [Green Version]
- Cheng, L.; Ki, W.H.; Yang, F.; Mok, P.K.T.; Jing, X. Predicting Subharmonic Oscillation of Voltage-Mode Switching Converters Using a Circuit-Oriented Geometrical Approach. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 717–730. [Google Scholar] [CrossRef]
- Fan, H.; Cheng, W.; Feng, Q.; Feng, L.; Li, D.; Diao, X.; Cen, Y.; Heidari, H. High-Precision Adaptive Slope Compensation Circuit for DC-DC Converter in Wearable Devices. IEEE Access 2020, 8, 34104–34112. [Google Scholar] [CrossRef]
- Xiao, Z.; Ren, J.; Xu, Y.; Wang, Y.; Zhao, G.; Lu, C.; Hu, W. An automatic slope compensation adjustment technique for peak-current mode DC-DC converters. AEU Int. J. Electron. Commun. 2019, 110, 152860. [Google Scholar] [CrossRef]
- Morcillo, J.D.; Burbano, D.; Angulo, F. Adaptive Ramp Technique for Controlling Chaos and Subharmonic Oscillations in DC–DC Power Converters. IEEE Trans. Power Electron. 2016, 31, 5330–5343. [Google Scholar] [CrossRef]
- Aroudi, A.E.; Mandal, K.; Al-Numay, M.S.; Giaouris, D.; Banerjee, S. Piecewise Quadratic Slope Compensation Technique for DC-DC Switching Converters. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 5574–5585. [Google Scholar] [CrossRef]
- Wu, H.; Pickert, V.; Deng, X.; Giaouris, D.; Li, W.; He, X. Polynomial Curve Slope Compensation for Peak-Current-Mode-Controlled Power Converters. IEEE Trans. Ind. Electron. 2019, 66, 470–481. [Google Scholar] [CrossRef]
- Müller, P.C. Calculation of Lyapunov exponents for dynamic systems with discontinuities. Chaos Solitons Fractals 1995, 5, 1671–1681. [Google Scholar] [CrossRef]
- Di Bernardo, M.; Garefalo, F.; Glielmo, L.; Vasca, F. Analysis of chaotic buck, boost and buck-boost converters through switching maps. In Proceedings of the PESC97. Record 28th Annual IEEE Power Electronics Specialists Conference. Formerly Power Conditioning Specialists Conference 1970–71. Power Processing and Electronic Specialists Conference 1972, St. Louis, MO, USA, 27 June 1997; Volume 1, pp. 754–760. [Google Scholar]
- Axelrod, B.; Berkovich, Y.; Ioinovici, A. Hybrid switched-capacitor-Cuk/Zeta/Sepic converters in step-up mode. In Proceedings of the 2005 IEEE International Symposium on Circuits and Systems, Kobe, Japan, 15 August 2005; pp. 1310–1313. [Google Scholar]
- Vosoughi, N.; Abbasi, M.; Abbasi, E.; Sabahi, M. A Zeta-based switched-capacitor DC-DC converter topology. Int. J. Circuit Theory Appl. 2019, 47, 1302–1322. [Google Scholar] [CrossRef]
- Forouzesh, M.; Siwakoti, Y.P.; Gorji, S.A.; Blaabjerg, F.; Lehman, B. Step-up DC–DC converters: A comprehensive review of voltage-boosting techniques, topologies, and applications. IEEE Trans. Power Electron. 2017, 32, 9143–9178. [Google Scholar] [CrossRef]
- Angulo-Garcia, D.; Angulo, F.; Osorio, G.; Olivar, G. Control of a dc-dc buck converter through contraction techniques. Energies 2018, 11, 3086. [Google Scholar] [CrossRef] [Green Version]
- Fiore, D.; Hogan, S.J.; Di Bernardo, M. Contraction analysis of switched systems via regularization. Automatica 2016, 73, 279–288. [Google Scholar] [CrossRef] [Green Version]
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid-Connected Photovoltaic Systems: An Overview of Recent Research and Emerging PV Converter Technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Mumtaz, F.; Zaihar Yahaya, N.; Tanzim Meraj, S.; Singh, B.; Kannan, R.; Ibrahim, O. Review on non-isolated DC-DC converters and their control techniques for renewable energy applications. Ain Shams Eng. J. 2021. [Google Scholar] [CrossRef]
- Zhu, B.; Liu, G.; Zhang, Y.; Huang, Y.; Hu, S. Single-Switch High Step-Up Zeta Converter Based on Coat Circuit. IEEE Access 2021, 9, 5166–5176. [Google Scholar] [CrossRef]
- Ellappan, M.; Anbukumar, K. Stability Analysis in Positive Output and Negative Output DC to DC Converters Used in Renewable Energy Applications. Preprints 2019. [Google Scholar] [CrossRef]
- Thirumeni, M.; Thangavelusamy, D. Performance analysis of PI and SMC controlled zeta converter. Int. J. Recent Technol. Eng. 2019, 8, 8700–8706. [Google Scholar]
- Motahhir, S.; El Hammoumi, A.; El Ghzizal, A. The most used MPPT algorithms: Review and the suitable low-cost embedded board for each algorithm. J. Clean. Prod. 2020, 246, 118983. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Values | |
|---|---|
| = 10 V | V |
| F | F |
| H | H |
| s | |
| = 1 | = 500 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Angulo-García, D.; Angulo, F.; Muñoz, J.-G. DC-DC Zeta Power Converter: Ramp Compensation Control Design and Stability Analysis. Appl. Sci. 2021, 11, 5946. https://doi.org/10.3390/app11135946
Angulo-García D, Angulo F, Muñoz J-G. DC-DC Zeta Power Converter: Ramp Compensation Control Design and Stability Analysis. Applied Sciences. 2021; 11(13):5946. https://doi.org/10.3390/app11135946
Chicago/Turabian StyleAngulo-García, David, Fabiola Angulo, and Juan-Guillermo Muñoz. 2021. "DC-DC Zeta Power Converter: Ramp Compensation Control Design and Stability Analysis" Applied Sciences 11, no. 13: 5946. https://doi.org/10.3390/app11135946
APA StyleAngulo-García, D., Angulo, F., & Muñoz, J.-G. (2021). DC-DC Zeta Power Converter: Ramp Compensation Control Design and Stability Analysis. Applied Sciences, 11(13), 5946. https://doi.org/10.3390/app11135946