
Scheduling Optimization of Prefabricated Construction Projects by Genetic Algorithm



Abstract
1. Introduction
2. Literature Review
2.1. Resource-Constrained Project Scheduling Problem
2.2. Prefabricated Building Scheduling Problem
2.3. Solution Algorithm
2.3.1. Exact Algorithm
2.3.2. Heuristic Algorithm
2.3.3. Meta-Heuristic Algorithm
3. Problem Statement and Mathematical Formulation
3.1. Assumptions
- (1)
- Assume that the first activity 1 at the beginning of the project and the last activity n at the end of the project are dummy work, which does not consume any time and resources.
- (2)
- The process activity adopts the end-to-start (F-S type) logic relationship to express the sequence relationship between the activities. Assume that the time lag between the processes is zero.
- (3)
- Assume that each activity is executed in a non-preemptive manner, once each process activity starts, it will be executed uninterrupted to the end.
- (4)
- Assume that each activity has only one execution mode, and the time consumption and resource requirements of each activity during the execution process remain unchanged.
- (5)
- In order to save inventory costs and ensure the smooth progress of construction, it is assumed that the maximum stacking volume of prefabricated components on site each time shall not exceed the on-site inventory space, and the stock volume is sufficient for the assembly construction of the next process.
3.2. Notations
3.3. Formulation of Mathematical Model
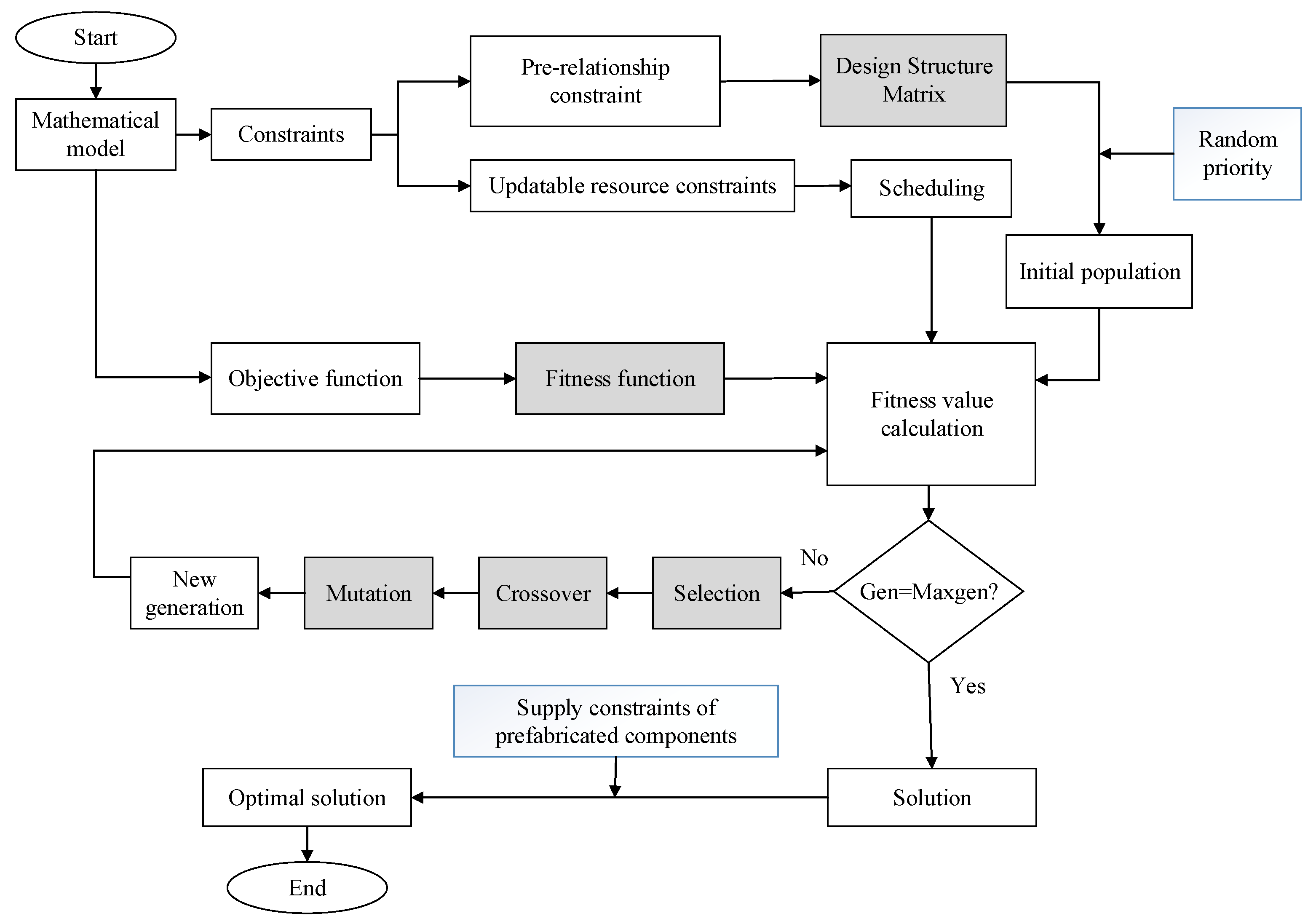
4. The Proposed Genetic Algorithm
4.1. Brief Introduction of Genetic Algorithm for Scheduling Problem of Prefabricated Building
4.2. Genetic Algorithm Design for Scheduling Problem of Prefabricated Building
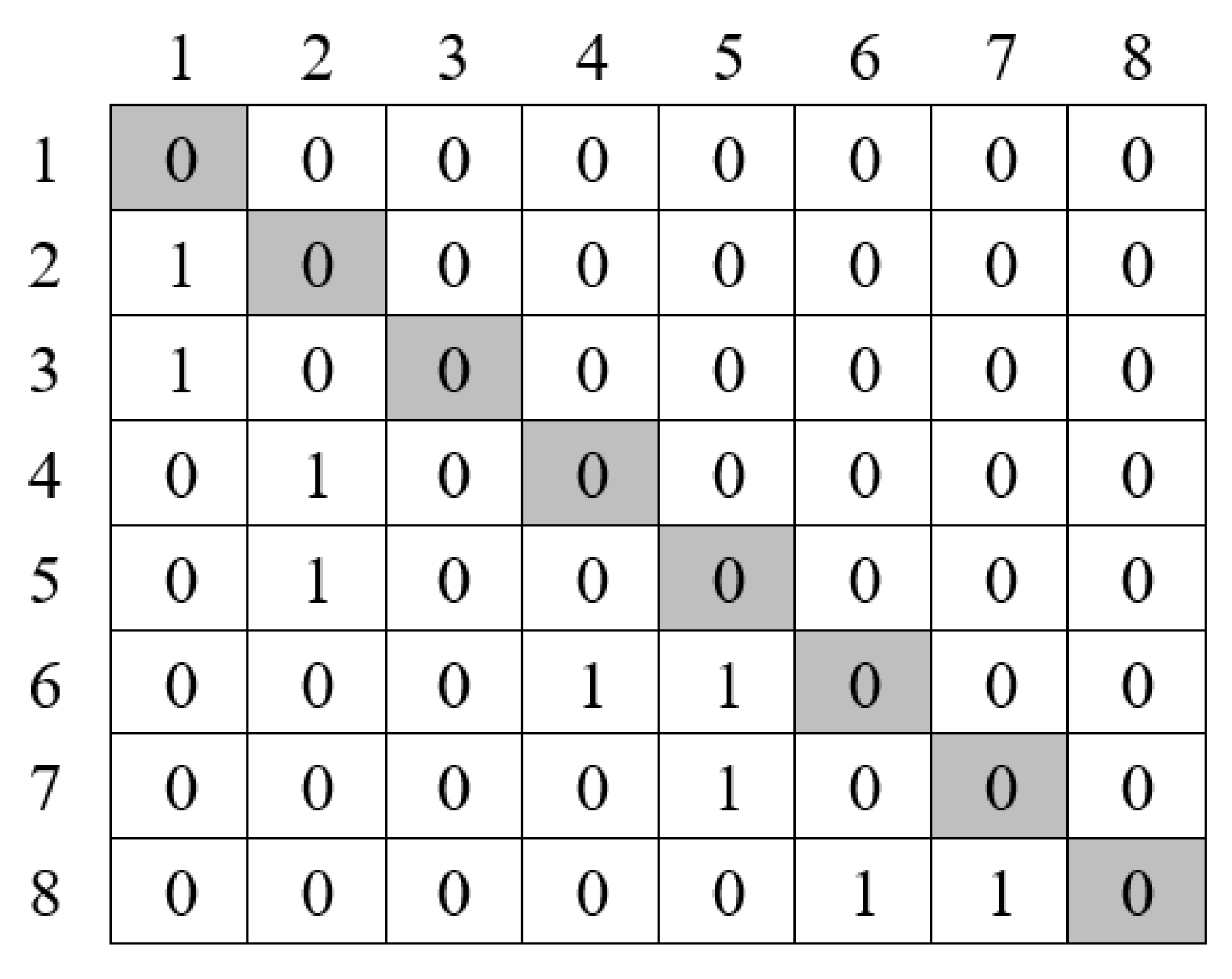
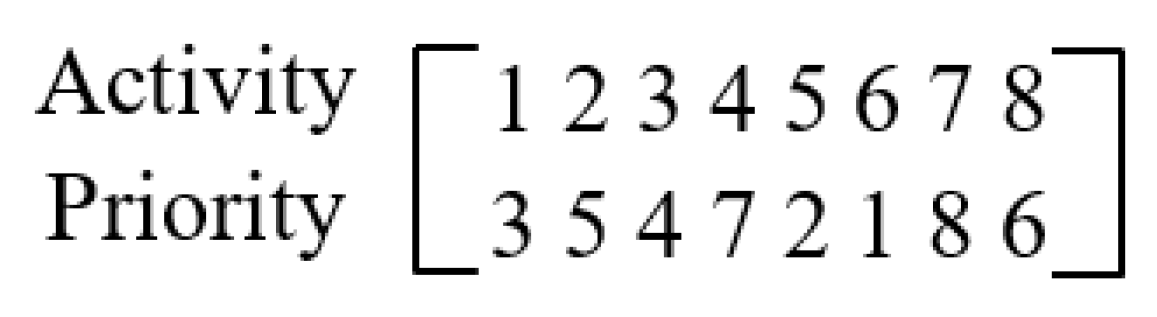
4.2.1. Coding
4.2.2. Fitness Function
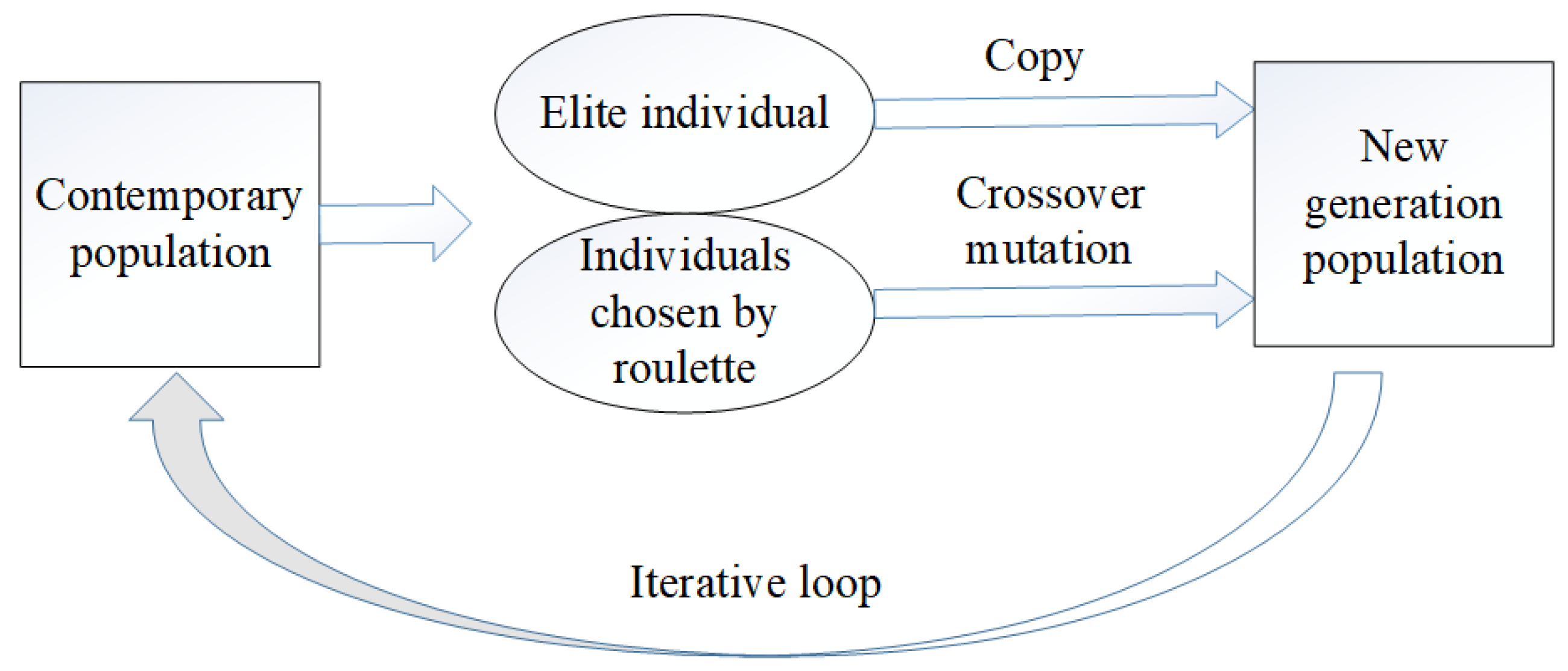
4.2.3. Selection Operator
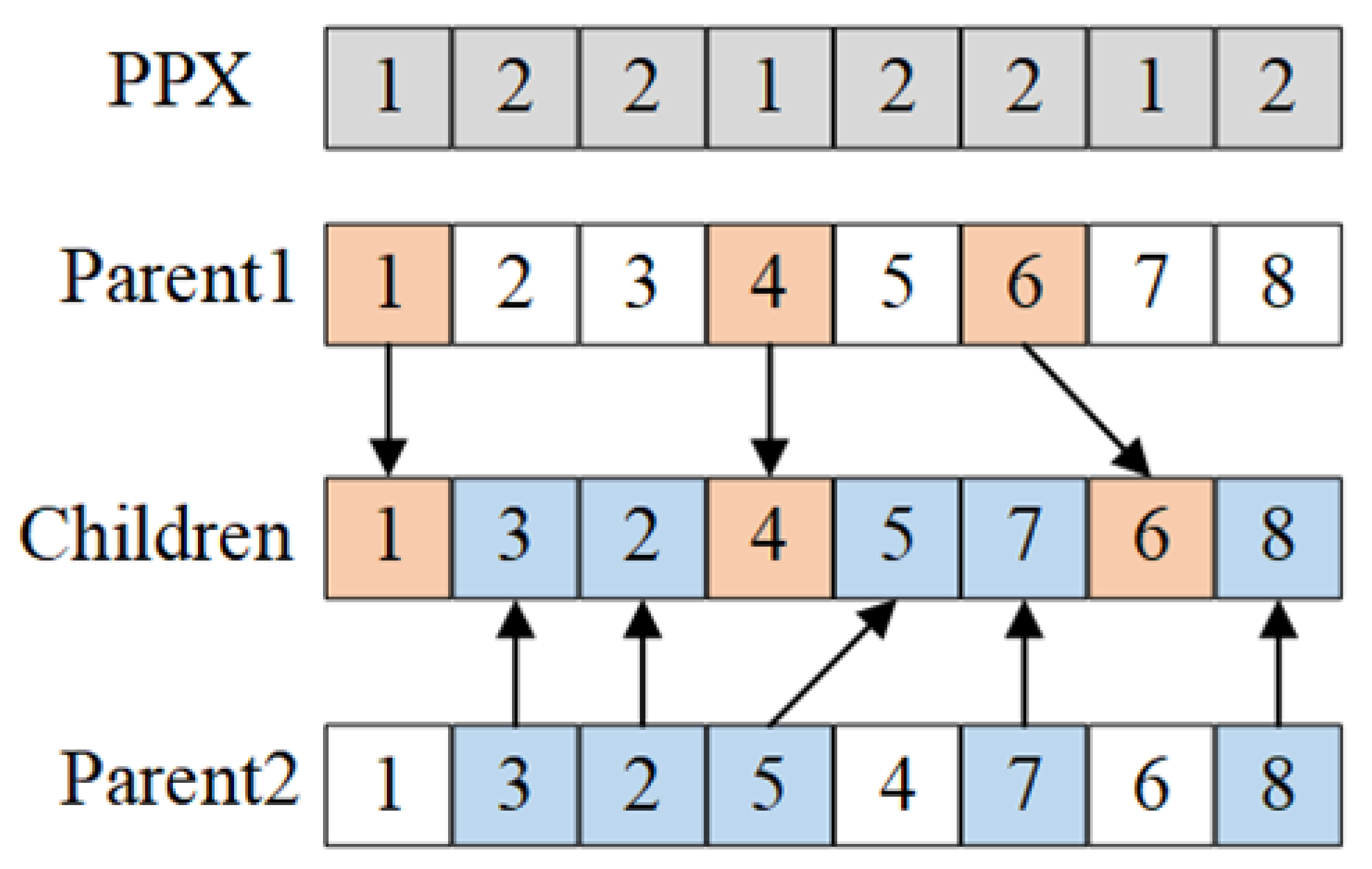
4.2.4. Crossover Operator
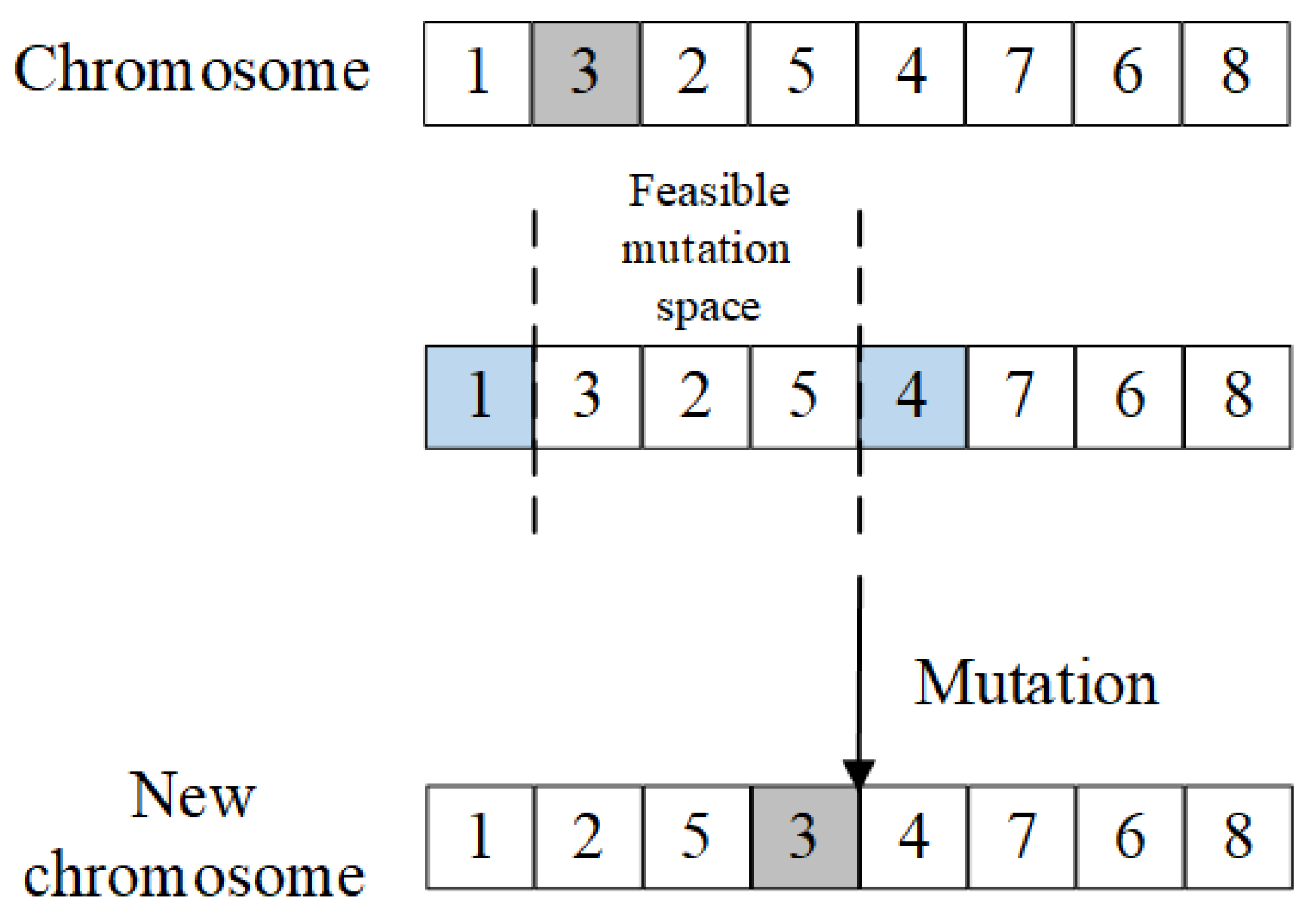
4.2.5. Mutation Operator
5. Computational Experiments
5.1. Tested Instances and Parameter Setting
5.2. Experimental Results
5.2.1. Evaluation Method
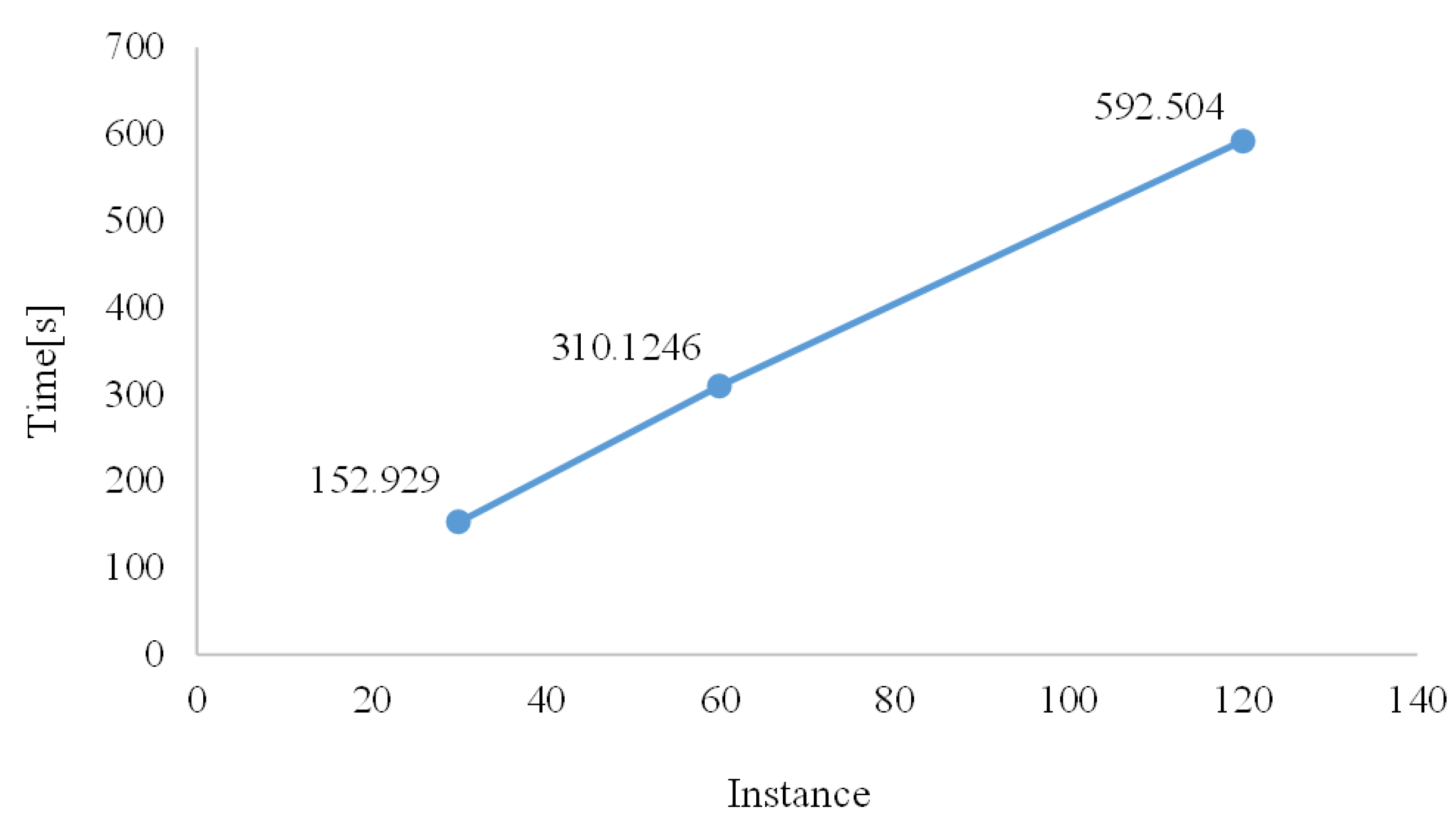
5.2.2. Results
6. Case Study
6.1. Project Description
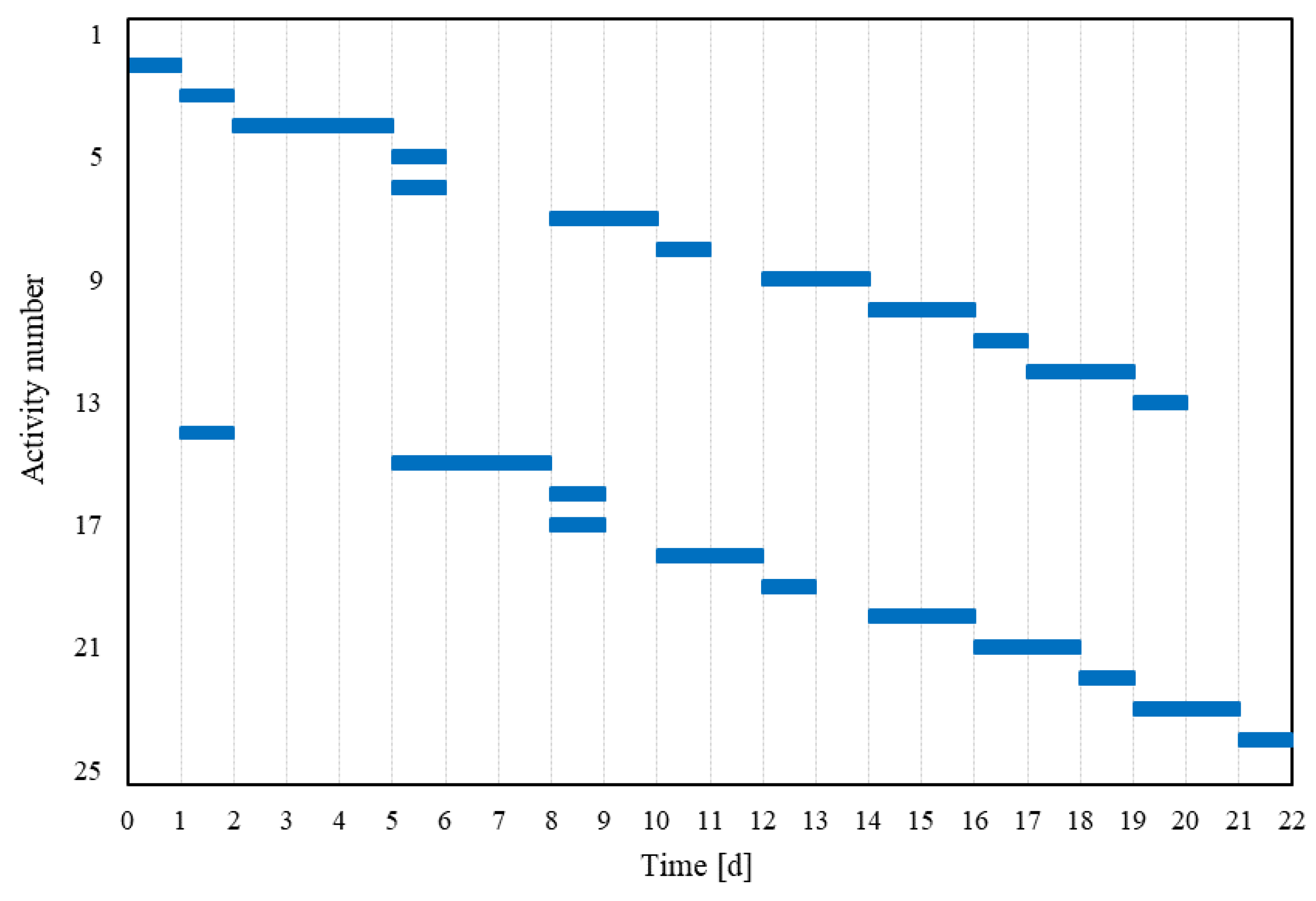
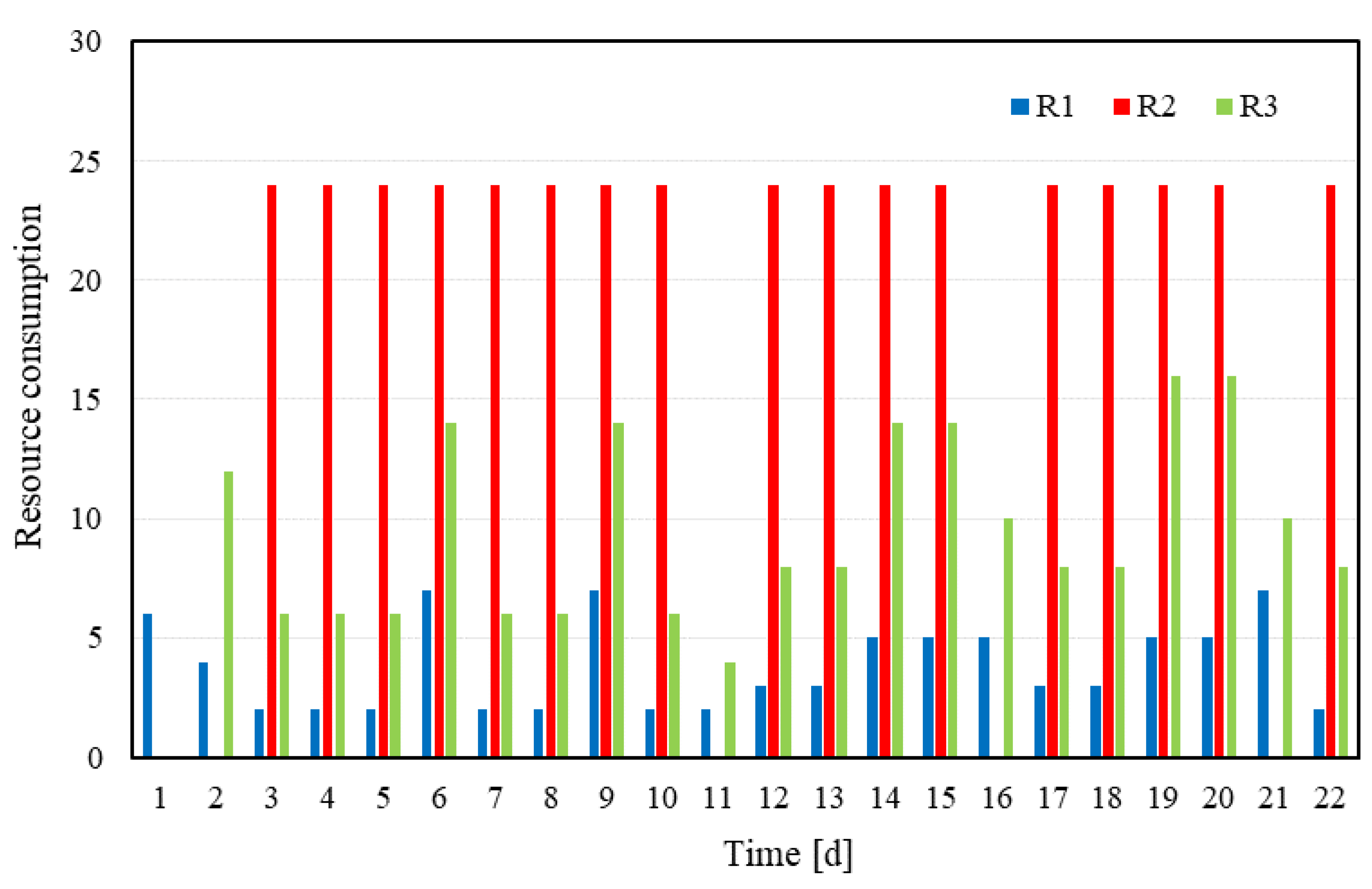
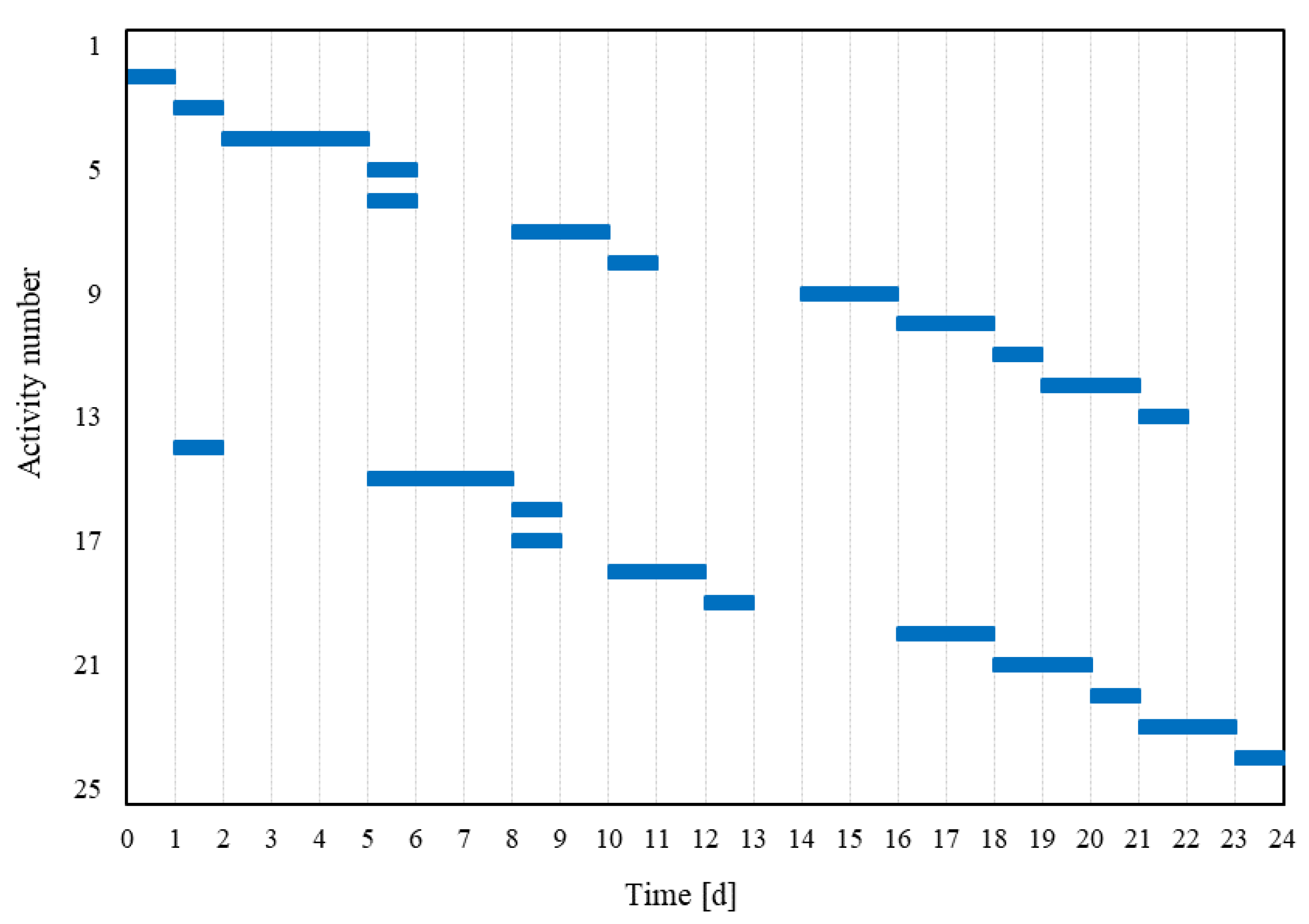
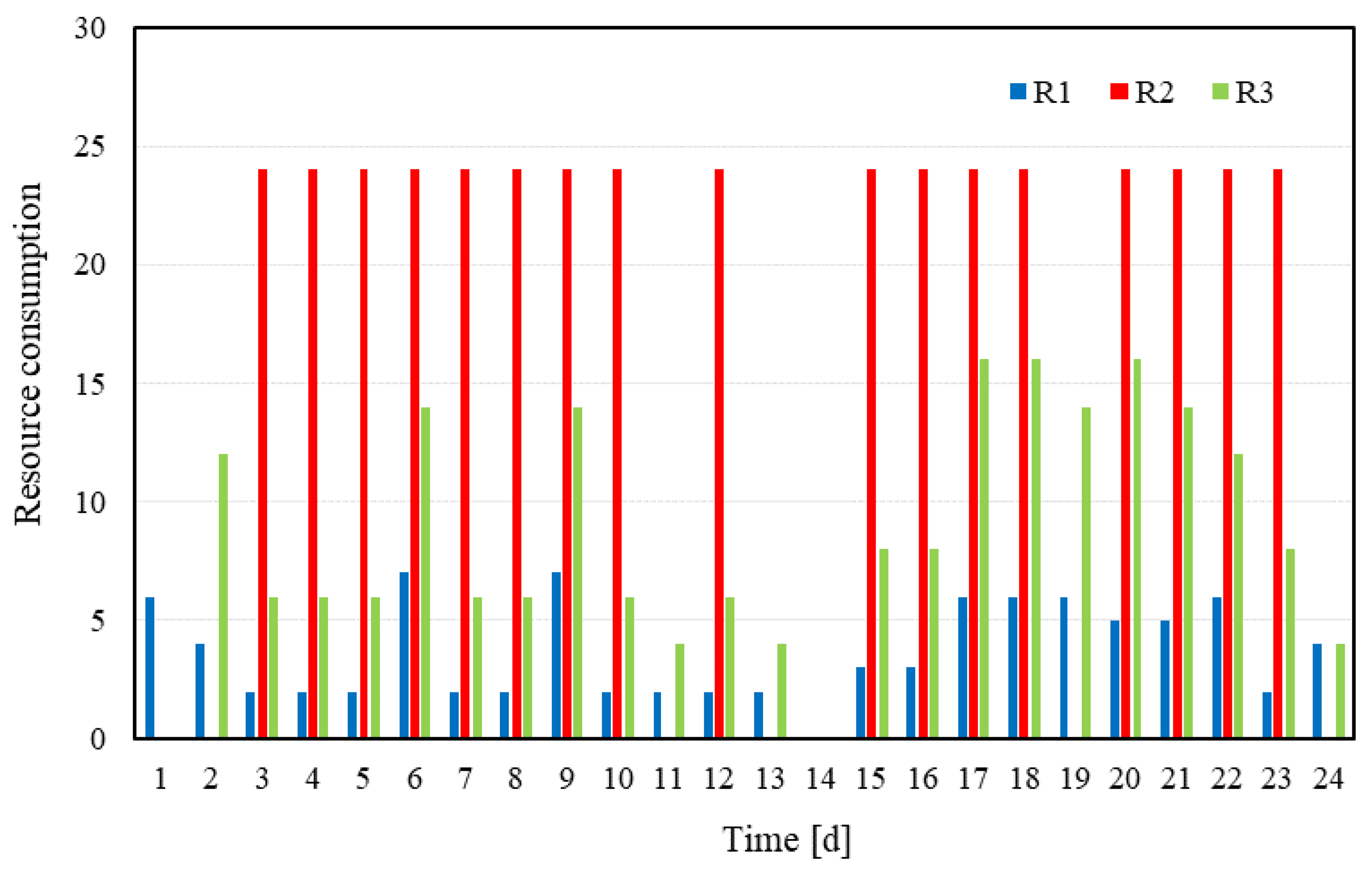
6.2. Simulation Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, L.-K.; Yuan, R.-P.; Ji, X.-J.; Lu, X.-Y.; Xiao, J.; Tao, J.-B.; Kang, X.; Li, X.; He, Z.-H.; Quan, S.; et al. Modular Composite Building in Urgent Emergency Engineering Projects: A Case Study of Accelerated Design and Construction of Wuhan Thunder God Mountain/Leishenshan Hospital to COVID-19 Pandemic. Autom. Constr. 2021, 124, 103555. [Google Scholar] [CrossRef]
- Jiang, R.; Mao, C.; Hou, L.; Wu, C.; Tan, J. A SWOT Analysis for Promoting Off-Site Construction under the Backdrop of China’s New Urbanisation. J. Clean. Prod. 2018, 173, 225–234. [Google Scholar] [CrossRef]
- Xu, Z.; Zayed, T.; Niu, Y. Comparative Analysis of Modular Construction Practices in Mainland China, Hong Kong and Singapore. J. Clean. Prod. 2020, 245, 118861. [Google Scholar] [CrossRef]
- Li, Z.; Shen, G.Q.; Xue, X. Critical Review of the Research on the Management of Prefabricated Construction. Habitat Int. 2014, 43, 240–249. [Google Scholar] [CrossRef]
- Kawecki, L.R. Environmental Performance Of Modular Fabrication: Calculating the Carbon Footprint of Energy Used in the Construction of a Modular Home. Ph.D. Dissertations & Theses Gradworks, Arizona State University, Tempe, AZ, USA, 2010. [Google Scholar]
- Alvanchi, A.; Azimi, R.; Lee, S.; AbouRizk, S.M.; Zubick, P. Off-Site Construction Planning Using Discrete Event Simulation. J. Archit. Eng. 2012, 18, 114–122. [Google Scholar] [CrossRef]
- Lee, J.; Hyun, H. Multiple Modular Building Construction Project Scheduling Using Genetic Algorithms. J. Constr. Eng. Manag. 2019, 145, 04018116. [Google Scholar] [CrossRef]
- Liu, J.; Liu, Y.; Shi, Y.; Li, J. Solving Resource-Constrained Project Scheduling Problem via Genetic Algorithm. J. Comput. Civ. Eng. 2020, 34, 04019055. [Google Scholar] [CrossRef]
- Liu, S.; Feng, S. Disruption Management Simulation for Multi-Mode Resource-Constrained Project Scheduling Problem. J. Syst. Simul. 2017, 29, 662–668. [Google Scholar]
- Arashpour, M.; Wakefield, R.; Lee, E.W.M.; Chan, R.; Hosseini, M.R. Analysis of Interacting Uncertainties in On-Site and off-Site Activities: Implications for Hybrid Construction. Int. J. Proj. Manag. 2016, 34, 1393–1402. [Google Scholar] [CrossRef]
- Jain, V.; Sethi, P.; Arya, S.; Verma, R.; Chawla, C. Project Evaluation Using Critical Path Method & Project Evaluation Review Technique. Wesleyan J. Res. 2020, 13, 1–9. [Google Scholar]
- Bettemir, Ö.H.; Sonmez, R. Hybrid Genetic Algorithm with Simulated Annealing for Resource-Constrained Project Scheduling. J. Manag. Eng. 2015, 31, 04014082. [Google Scholar] [CrossRef]
- Cheng, M.-Y.; Tran, D.-H.; Wu, Y.-W. Using a Fuzzy Clustering Chaotic-Based Differential Evolution with Serial Method to Solve Resource-Constrained Project Scheduling Problems. Autom. Constr. 2014, 37, 88–97. [Google Scholar] [CrossRef]
- Xie, F.; Li, H.; Xu, Z. Multi-Mode Resource-Constrained Project Scheduling with Uncertain Activity Cost. Expert Syst. Appl. 2021, 168, 114475. [Google Scholar] [CrossRef]
- Chan, W.T.; Hu, H. Production Scheduling for Precast Plants Using a Flow Shop Sequencing Model. J. Comput. Civ. Eng. 2002, 16, 165–174. [Google Scholar] [CrossRef]
- Taghaddos, H.; Hermann, U.; AbouRizk, S.; Mohamed, Y. Simulation-Based Multiagent Approach for Scheduling Modular Construction. J. Comput. Civ. Eng. 2014, 28, 263–274. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, H.; Gong, J. Simulation Based Multiple Disturbances Evaluation in the Precast Supply Chain for Improved Disturbance Prevention. J. Clean. Prod. 2018, 177, 232–244. [Google Scholar] [CrossRef]
- Mohamed, Y.; Borrego, D.; Francisco, L.; Al-Hussein, M.; AbouRizk, S.; Hermann, U. Simulation-based Scheduling of Module Assembly Yards: Case Study. Eng. Constr. Archit. Manag. 2007, 14, 293–311. [Google Scholar] [CrossRef]
- Abu Hammad, A.; Salem, O.; Hastak, M.; Syal, M. Decision Support System for Manufactured Housing Facility Layout. J. Archit. Eng. 2008, 14, 36–46. [Google Scholar] [CrossRef]
- Jeong, J.G.; Hastak, M.; Syal, M. Supply Chain Simulation Modeling for the Manufactured Housing Industry. J. Urban Plan. Dev. 2006, 132, 217–225. [Google Scholar] [CrossRef]
- Ma, Z.; Li, S.; Wang, Y.; Yang, Z. Component-Level Construction Schedule Optimization for Hybrid Concrete Structures. Autom. Constr. 2021, 125, 103607. [Google Scholar] [CrossRef]
- Nasereddin, M.; Mullens, M.A.; Cope, D. Automated Simulator Development: A Strategy for Modeling Modular Housing Production. Autom. Constr. 2007, 16, 212–223. [Google Scholar] [CrossRef]
- Wang, R.; Lian, J. Research on Construction Schedule Optimization of Assembly Building Based on NSGA-II. E3S Web Conf. 2020, 165, 06055. [Google Scholar] [CrossRef]
- Lee, J.; Park, M.; Lee, H.-S.; Hyun, H. Classification of Modular Building Construction Projects Based on Schedule-Driven Approach. J. Constr. Eng. Manag. 2019, 145, 04019031. [Google Scholar] [CrossRef]
- Arashpour, M.; Kamat, V.; Bai, Y.; Wakefield, R.; Abbasi, B. Optimization Modeling of Multi-Skilled Resources in Prefabrication: Theorizing Cost Analysis of Process Integration in off-Site Construction. Autom. Constr. 2018, 95, 1–9. [Google Scholar] [CrossRef]
- Sheng, B.; Wang, H.; Xiao, Z.; Zhang, C.; Zhao, F.; Yin, X. A Novel Heuristic Algorithm with Activity Back-Shift Response Model for Resource-Constrained Project Scheduling Problem. Soft Comput. 2019, 23, 7805–7819. [Google Scholar] [CrossRef]
- Su, Z.X.; Wei, H.Y.; Zou, X.; Qi, J.X. Zero-One Formulation for a Partial Resource-Constrained Project Scheduling Problem with Generalized Precedence Relations. J. Constr. Eng. Manag. 2019, 145. [Google Scholar] [CrossRef]
- Hartmann, S.; Briskorn, D. A Survey of Variants and Extensions of the Resource-Constrained Project Scheduling Problem. Eur. J. Oper. Res. 2010, 207, 1–14. [Google Scholar] [CrossRef]
- Jia, Q.; Guo, Y. Hybridization of ABC and PSO Algorithms for Improved Solutions of RCPSP. J. Chin. Inst. Eng. 2016, 39, 727–734. [Google Scholar] [CrossRef]
- Möhring, R.H.; Schulz, A.S.; Stork, F.; Uetz, M. Solving Project Scheduling Problems by Minimum Cut Computations. Manag. Sci. 2003, 49, 330–350. [Google Scholar] [CrossRef]
- Messelis, T.; De Causmaecker, P. An Automatic Algorithm Selection Approach for the Multi-Mode Resource-Constrained Project Scheduling Problem. Eur. J. Oper. Res. 2014, 233, 511–528. [Google Scholar] [CrossRef]
- Moradi, H.; Shadrokh, S. A Robust Scheduling for the Multi-Mode Project Scheduling Problem with a given Deadline under Uncertainty of Activity Duration. Int. J. Prod. Res. 2019, 57, 3138–3167. [Google Scholar] [CrossRef]
- Shariatmadari, M.; Nahavandi, N.; Zegordi, S.H.; Sobhiyah, M.H. Integrated Resource Management for Simultaneous Project Selection and Scheduling. Comput. Ind. Eng. 2017, 109, 39–47. [Google Scholar] [CrossRef]
- Dodin, B.; Elimam, A.A. Integrated Project Scheduling and Material Planning with Variable Activity Duration and Rewards. IIE Trans. 2001, 33, 1005–1018. [Google Scholar] [CrossRef]
- Zhang, L.; Liang, H. Repetitive Construction Project Deadline Constraint Satisfaction Problem. J. Civ. Eng. Manag. 2016, 33, 22–29. [Google Scholar]
- Zoraghi, N.; Shahsavar, A.; Niaki, S.T.A. A Hybrid Project Scheduling and Material Ordering Problem: Modeling and Solution Algorithms. Appl. Soft Comput. 2017, 58, 700–713. [Google Scholar] [CrossRef]
- Tian, M.; Liu, R.J.; Zhang, G.J. Solving the Resource-Constrained Multi-Project Scheduling Problem with an Improved Critical Chain Method. J. Oper. Res. Soc. 2020, 71, 1243–1258. [Google Scholar] [CrossRef]
- Zoraghi, N.; Shahsavar, A.; Abbasi, B.; Van Peteghem, V. Multi-Mode Resource-Constrained Project Scheduling Problem with Material Ordering under Bonus–Penalty Policies. TOP 2017, 25, 49–79. [Google Scholar] [CrossRef]
- Goncharov, E.N.; Leonov, V.V. Genetic Algorithm for the Resource-Constrained Project Scheduling Problem. Autom Remote Control 2017, 78, 1101–1114. [Google Scholar] [CrossRef]
- Armentano, V.A.; Mazzini, R. A Genetic Algorithm for Scheduling on a Single Machine with Set-up Times and Due Dates. Prod. Plan. Control 2000, 11, 713–720. [Google Scholar] [CrossRef]
- Zahmani, M.H.; Atmani, B. Extraction of Dispatching Rules for Single Machine Total Weighted Tardiness Using a Modified Genetic Algorithm and Data Mining. Int. J. Manuf. Res. 2018, 13, 1–25. [Google Scholar] [CrossRef]
- Sabeghi, N.; Tareghian, H.R.; Demeulemeester, E.; Taheri, H. Determining the Timing of Project Control Points Using a Facility Location Model and Simulation. Comput. Oper. Res. 2015, 61, 69–80. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, J.; HU, Z. Review and Thinking on Development of Building Industrialization in China. China Civ. Eng. J. 2016, 49, 1–8. [Google Scholar]
- Malcolm, D.G.; Roseboom, J.H.; Clark, C.E.; Fazar, W. Application of a Technique for Research and Development Program Evaluation. Oper. Res. 1959, 7, 646–669. [Google Scholar] [CrossRef]
- Kelley, J.E.; Walker, M.R. Critical-Path Planning and Scheduling. In Papers Presented at the December 1–3, 1959, Eastern Joint IRE-AIEE-ACM Computer Conference; Association for Computing Machinery: Boston, MA, USA, 1 December 1959; pp. 160–173. [Google Scholar]
- Berthold, T.; Heinz, S.; Lübbecke, M.E.; Möhring, R.H.; Schulz, J. A Constraint Integer Programming Approach for Resource-Constrained Project Scheduling. In Integration of AI and OR Techniques in Constraint Programming for Combinatorial Optimization Problems; Lodi, A., Milano, M., Toth, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 313–317. [Google Scholar]
- Chakrabortty, R.; Sarker, R.; Essam, D. Resource Constrained Project Scheduling: A Branch and Cut Approach. In Proceedings of the 45th International Conference on Computers and Industrial Engineering, Metz, Paris, 28–30 October 2015. [Google Scholar]
- Buddhakulsomsiri, J.; Kim, D.S. Priority Rule-Based Heuristic for Multi-Mode Resource-Constrained Project Scheduling Problems with Resource Vacations and Activity Splitting. Eur. J. Oper. Res. 2007, 178, 374–390. [Google Scholar] [CrossRef]
- Shen, W.; Wang, L.; Hao, Q. Agent-Based Distributed Manufacturing Process Planning and Scheduling: A State-of-the-Art Survey. IEEE Trans. Syst. Mancybern. Part C (Appl. Rev.) 2006, 36, 563–577. [Google Scholar] [CrossRef]
- Roy, B.; Sen, A.K. Meta-Heuristic Techniques to Solve Resource-Constrained Project Scheduling Problem. In Proceedings of the International Conference on Innovative Computing and Communications; Bhattacharyya, S., Hassanien, A.E., Gupta, D., Khanna, A., Pan, I., Eds.; Springer: Singapore, 2019; pp. 93–99. [Google Scholar]
- Demeulemeester, E.L.; Herroelen, W.S. An Efficient Optimal Solution Procedure for the Preemptive Resource-Constrained Project Scheduling Problem. Eur. J. Oper. Res. 1996, 90, 334–348. [Google Scholar] [CrossRef]
- Kolisch, R. Efficient Priority Rules for the Resource-Constrained Project Scheduling Problem. J. Oper. Manag. 1996, 14, 179–192. [Google Scholar] [CrossRef]
- Salhi, S. Handbook of Metaheuristics (2nd Edition). J. Oper. Res. Soc. 2014, 65, 320. [Google Scholar] [CrossRef]
- Zhang, Y.; Gong, D.; Hu, Y.; Zhang, W. Feature Selection Algorithm Based on Bare Bones Particle Swarm Optimization. Neurocomputing 2015, 148, 150–157. [Google Scholar] [CrossRef]
- Yu, X.; Liang, G.; Dong, Z. Multi-Objective Flexible Job Shop Scheduling Based on Hybrid Genetic Tabu Search Algorithm. Machinery 2016, 54, 90–93. [Google Scholar]
- Oh, I.S.; Lee, J.S.; Moon, B.R. Hybrid Genetic Algorithms for Feature Selection. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1424–1437. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Ji, D. Data- and Rule-Based Integrated Mechanism for Job Shop Scheduling. Int. J. Comput. Commun. Eng. 2015, 4, 180–186. [Google Scholar] [CrossRef]
- Su, Y.; Han, L.; Wang, H.; Wang, J. The Workshop Scheduling Problems Based on Data Mining and Particle Swarm Optimisation Algorithm in Machine Learning Areas. Enterp. Inf. Syst. 2019, 1–16. [Google Scholar] [CrossRef]
- Weckman, G.R.; Ganduri, C.V.; Koonce, D.A. A Neural Network Job-Shop Scheduler. J. Intell. Manuf. 2008, 19, 191–201. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- He, F.; Wang, M.; Tang, Y. Application of Genetic Algorithm in Workshop Flow Job Scheduling. J. Comput. Appl. 2010, 30, 274–276. [Google Scholar]
- Ma, Z.; He, Z.; Wang, N.; Yang, Z.; Demeulemeester, E. A Genetic Algorithm for the Proactive Resource-Constrained Project Scheduling Problem With Activity Splitting. IEEE Trans. Eng. Manag. 2019, 66, 459–474. [Google Scholar] [CrossRef]
- El-Rayes, K.; Kandil, A. Time-Cost-Quality Trade-Off Analysis for Highway Construction. J. Constr. Eng. Manag. 2005, 131, 477–486. [Google Scholar] [CrossRef]
- Xuan, G.; Cheng, R. Genetic Algorithm and Engineering Optimization; Tsinghua University Press: Beijing, China, 2004; ISBN 978-7-302-07482-3. [Google Scholar]
- Chai, C. Modeling Resource-Constrained Project Scheduling Problem and Its Solution by Genetic Algorithm. J. Digit. Inf. Manag. 2013, 11, 87–96. [Google Scholar]
- Le, Y.; Sun, Q.; Chen, J.; Tang, K. Pre-Project Schedule Optimization of Airport Based on Design Structure Matrix. J. Tongji Univ. (Nat. Sci.) 2020, 48, 1523–1529. [Google Scholar]
- Shukla, A.; Pandey, H.M.; Mehrotra, D. Comparative Review of Selection Techniques in Genetic Algorithm. In Proceedings of the 2015 International Conference on Futuristic Trends on Computational Analysis and Knowledge Management (ABLAZE), Greater Noida, India, 25–27 February 2015; pp. 515–519. [Google Scholar]
- Kolisch, R.; Sprecher, A.; Drexl, A. Characterization and Generation of a General Class of Resource-Constrained Project Scheduling Problems. Manag. Sci. 1995, 41, 1693–1703. [Google Scholar] [CrossRef]
- Kolisch, R.; Hartmann, S. Experimental Investigation of Heuristics for Resource-Constrained Project Scheduling: An Update. Eur. J. Oper. Res. 2006, 174, 23–37. [Google Scholar] [CrossRef]
- Rahman, H.F.; Chakrabortty, R.K.; Ryan, M.J. Memetic Algorithm for Solving Resource Constrained Project Scheduling Problems. Autom. Constr. 2020, 111, 103052. [Google Scholar] [CrossRef]
- Berthaut, F.; Pellerin, R.; Hajji, A.; Perrier, N. A Path Relinking-Based Scatter Search for the Resource-Constrained Project Scheduling Problem. Int. J. Proj. Organ. Manag. 2018, 10, 1–36. [Google Scholar] [CrossRef]
- Elsayed, S.; Sarker, R.; Ray, T.; Coello, C.C. Consolidated Optimization Algorithm for Resource-Constrained Project Scheduling Problems. Inf. Sci. 2017, 418–419, 346–362. [Google Scholar] [CrossRef]
- Chand, S.; Singh, H.K.; Ray, T. A Heuristic Algorithm for Solving Resource Constrained Project Scheduling Problems. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation (CEC), San Sebastián, Spain, 5–8 June 2017; pp. 225–232. [Google Scholar]
- Zamani, R. An Evolutionary Implicit Enumeration Procedure for Solving the Resource-Constrained Project Scheduling Problem. Int. Trans. Oper. Res. 2017, 24, 1525–1547. [Google Scholar] [CrossRef]
- Gonzalez-Pardo, A.; Del Ser, J.; Camacho, D. Comparative Study of Pheromone Control Heuristics in ACO Algorithms for Solving RCPSP Problems. Appl. Soft Comput. 2017, 60, 241–255. [Google Scholar] [CrossRef]
- Munlin, M.; Anantathanavit, M. Hybrid Radius Particle Swarm Optimization. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 2180–2184. [Google Scholar]
- Paraskevopoulos, D.C.; Tarantilis, C.D.; Ioannou, G. An Adaptive Memory Programming Framework for the Resource-Constrained Project Scheduling Problem. Int. J. Prod. Res. 2016, 54, 4938–4956. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, L. A Multi-Agent Optimization Algorithm for Resource Constrained Project Scheduling Problem. Expert Syst. Appl. 2015, 42, 6039–6049. [Google Scholar] [CrossRef]
- Fahmy, A.; Hassan, T.M.; Bassioni, H. Improving RCPSP Solutions Quality with Stacking Justification—Application with Particle Swarm Optimization. Expert Syst. Appl. 2014, 41, 5870–5881. [Google Scholar] [CrossRef]
- Koulinas, G.; Kotsikas, L.; Anagnostopoulos, K. A Particle Swarm Optimization Based Hyper-Heuristic Algorithm for the Classic Resource Constrained Project Scheduling Problem. Inf. Sci. 2014, 277, 680–693. [Google Scholar] [CrossRef]
- Zamani, R. A Competitive Magnet-Based Genetic Algorithm for Solving the Resource-Constrained Project Scheduling Problem. Eur. J. Oper. Res. 2013, 229, 552–559. [Google Scholar] [CrossRef]
- Lim, A.; Ma, H.; Rodrigues, B.; Tan, S.T.; Xiao, F. New Meta-Heuristics for the Resource-Constrained Project Scheduling Problem. Flex. Serv. Manuf. J. 2013, 25, 48–73. [Google Scholar] [CrossRef]
- Mobini, M.; Mobini, Z.; Rabbani, M. An Artificial Immune Algorithm for the Project Scheduling Problem under Resource Constraints. Appl. Soft Comput. 2011, 11, 1975–1982. [Google Scholar] [CrossRef]
- Chen, R.-M. Particle Swarm Optimization with Justification and Designed Mechanisms for Resource-Constrained Project Scheduling Problem. Expert Syst. Appl. 2011, 38, 7102–7111. [Google Scholar] [CrossRef]
- Chen, W.; Shi, Y.; Teng, H.; Lan, X.; Hu, L. An Efficient Hybrid Algorithm for Resource-Constrained Project Scheduling. Inf. Sci. 2010, 180, 1031–1039. [Google Scholar] [CrossRef]
- Debels, D.; Vanhoucke, M. A Decomposition-Based Genetic Algorithm for the Resource-Constrained Project-Scheduling Problem. Oper. Res. 2007, 55, 457–469. [Google Scholar] [CrossRef]
- Gonçalves, J.F.; Resende, M.G.C.; Mendes, J.J.M. A Biased Random-Key Genetic Algorithm with Forward-Backward Improvement for the Resource Constrained Project Scheduling Problem. J. Heuristics 2011, 17, 467–486. [Google Scholar] [CrossRef]
- Mahdi Mobini, M.D.; Rabbani, M.; Amalnik, M.S.; Razmi, J.; Rahimi-Vahed, A.R. Using an Enhanced Scatter Search Algorithm for a Resource-Constrained Project Scheduling Problem. Soft Comput. 2009, 13, 597–610. [Google Scholar] [CrossRef]
- Hsu, P.-Y.; Angeloudis, P.; Aurisicchio, M. Optimal Logistics Planning for Modular Construction Using Two-Stage Stochastic Programming. Autom. Constr. 2018, 94, 47–61. [Google Scholar] [CrossRef]
- Hsu, P.-Y.; Aurisicchio, M.; Angeloudis, P. Risk-Averse Supply Chain for Modular Construction Projects. Autom. Constr. 2019, 106, 102898. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Description |
|---|---|
| j | Sequence number of the activity contained in the project, j = 1, 2, …, n |
| t | Time number, t = 1, 2, …, T |
| k | Renewable resource serial number, k = 1, 2, …, K |
| On-site delivery time of prefabricated components required for activity j | |
| Start time of activity j | |
| Duration of activity j | |
| Finish time of activity j, | |
| Predecessor set of activity j | |
| kth renewable resource required by activity j | |
| Renewable resource supply of the kth resource at time t | |
| T | Actual project duration |
| Collection of activities being executed at time t |
| Parameters | Pop_Size | Max_gen | Pc | Pm |
|---|---|---|---|---|
| J30 | 100 | 500 | 0.8 | 0.01 |
| J60 | 100 | 500 | 0.8 | 0.01 |
| J120 | 50 | 1000 | 0.8 | 0.005 |
| J30 (%) | J60 (%) | J120 (%) | ||
|---|---|---|---|---|
| Avg_DeV_lb | Avg_DeV_lb | Avg_DeV_mpm | Avg_DeV_lb | Avg_DeV_mpm |
| 0.00 | 2.23 | 9.32 | 9.61 | 30.16 |
| Algorithms | J30 (%) | J60 (%) | J120 (%) |
|---|---|---|---|
| GA [This work] | 0.00 | 9.32 | 30.16 |
| MA(2020) [70] | 0.00 | 10.55 | 31.12 |
| SS-FBI(2018) [71] | 0.00 | 10.58 | 31.16 |
| COA(2017) [72] | 0.00 | 10.58 | 31.22 |
| Heuristic(2017) [73] | 0.03 | 10.91 | 32.52 |
| GA-part(2017) [74] | 0.01 | 10.71 | 31.81 |
| ACO-CRO(2017) [75] | _ | 11.40 | 26.51 |
| H-RPSO(2016) [76] | 0.01 | 10.11 | 30.25 |
| ReVNS(2016) [77] | 0.00 | 10.88 | 32.21 |
| MAOA(2015) [78] | 0.01 | 10.64 | 31.02 |
| MJPSO(2014) [79] | 0.02 | 10.85 | 32.40 |
| PSO-HH(2014) [80] | 0.01 | 10.68 | 31.23 |
| GA-MBX(2013) [81] | 0.00 | 10.65 | 31.30 |
| HGA(2013) [82] | 0.01 | 10.63 | 30.66 |
| Art.Imm.Alg(2011) [83] | 0.00 | 10.55 | 31.48 |
| JPSO(2011) [84] | 0.04 | 11.00 | 32.89 |
| ACOSS(2010) [85] | 0.01 | 10.98 | 30.56 |
| DBGA(2007) [86] | 0.02 | 10.68 | 30.69 |
| Activity | Activity Number | Predecessor | Duration/Day | R1 | R2 | R3 |
|---|---|---|---|---|---|---|
| Starting | 1 | - | 0 | 0 | 0 | 0 |
| Construction preparation | 2 | 1 | 1 | 6 | 0 | 0 |
| Plant bolt of A | 3 | 2 | 1 | 2 | 0 | 6 |
| Column lifting of A | 4 | 3 | 3 | 2 | 24 | 6 |
| Mounting bracing of A | 5 | 4 | 1 | 3 | 0 | 4 |
| Grouting of A | 6 | 4 | 1 | 2 | 0 | 4 |
| Single beam lifting of A | 7 | 5, 6 | 2 | 2 | 24 | 6 |
| Beam protection of A | 8 | 7 | 1 | 2 | 0 | 4 |
| Lattice beam lifting of A | 9 | 8 | 2 | 3 | 24 | 8 |
| Sleeve, bolt connecting of A | 10 | 9 | 2 | 3 | 0 | 8 |
| Gluing and grouting of A | 11 | 10 | 1 | 3 | 0 | 6 |
| Plywood hoisting of A | 12 | 11 | 2 | 2 | 24 | 8 |
| Concrete pouring of A | 13 | 12 | 1 | 4 | 0 | 4 |
| Plant bolt of B | 14 | 2 | 1 | 2 | 0 | 6 |
| Column lifting of B | 15 | 14 | 3 | 2 | 24 | 6 |
| Mounting bracing of B | 16 | 15 | 1 | 3 | 0 | 4 |
| Grouting of B | 17 | 15 | 1 | 2 | 0 | 4 |
| Single beam lifting of B | 18 | 16, 17 | 2 | 2 | 24 | 6 |
| Beam protection of B | 19 | 18 | 1 | 2 | 0 | 4 |
| Lattice beam lifting of B | 20 | 8, 19 | 2 | 3 | 24 | 8 |
| Sleeve and bolt connecting of B | 21 | 20 | 2 | 3 | 0 | 8 |
| Gluing and grouting of B | 22 | 21 | 1 | 3 | 0 | 6 |
| Plywood hoisting of B | 23 | 11, 22 | 2 | 2 | 24 | 8 |
| Concrete pouring of B | 24 | 23 | 1 | 4 | 0 | 4 |
| Ending | 25 | 13, 24 | 0 | 0 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, L.; Chen, Y.; Chang, R. Scheduling Optimization of Prefabricated Construction Projects by Genetic Algorithm. Appl. Sci. 2021, 11, 5531. https://doi.org/10.3390/app11125531
Xie L, Chen Y, Chang R. Scheduling Optimization of Prefabricated Construction Projects by Genetic Algorithm. Applied Sciences. 2021; 11(12):5531. https://doi.org/10.3390/app11125531
Chicago/Turabian StyleXie, Linlin, Yajiao Chen, and Ruidong Chang. 2021. "Scheduling Optimization of Prefabricated Construction Projects by Genetic Algorithm" Applied Sciences 11, no. 12: 5531. https://doi.org/10.3390/app11125531
APA StyleXie, L., Chen, Y., & Chang, R. (2021). Scheduling Optimization of Prefabricated Construction Projects by Genetic Algorithm. Applied Sciences, 11(12), 5531. https://doi.org/10.3390/app11125531