
ResQbot 2.0: An Improved Design of a Mobile Rescue Robot with an Inflatable Neck Securing Device for Safe Casualty Extraction

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
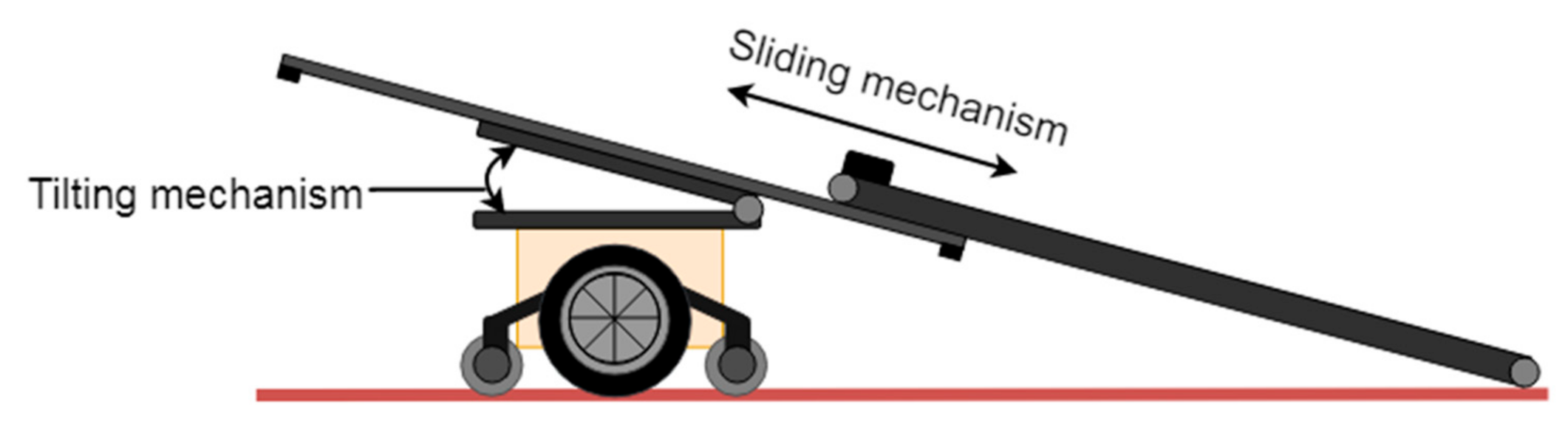
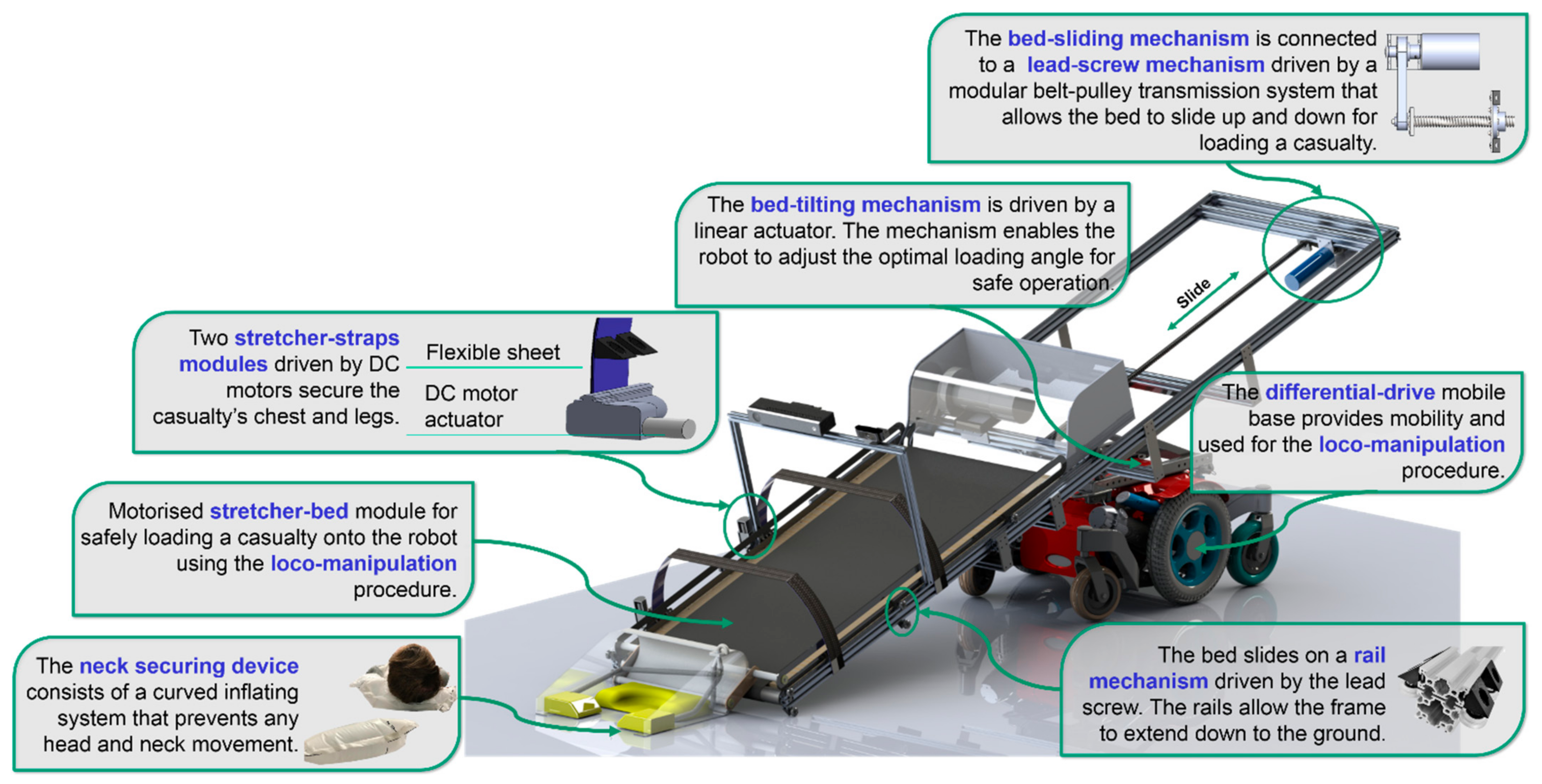
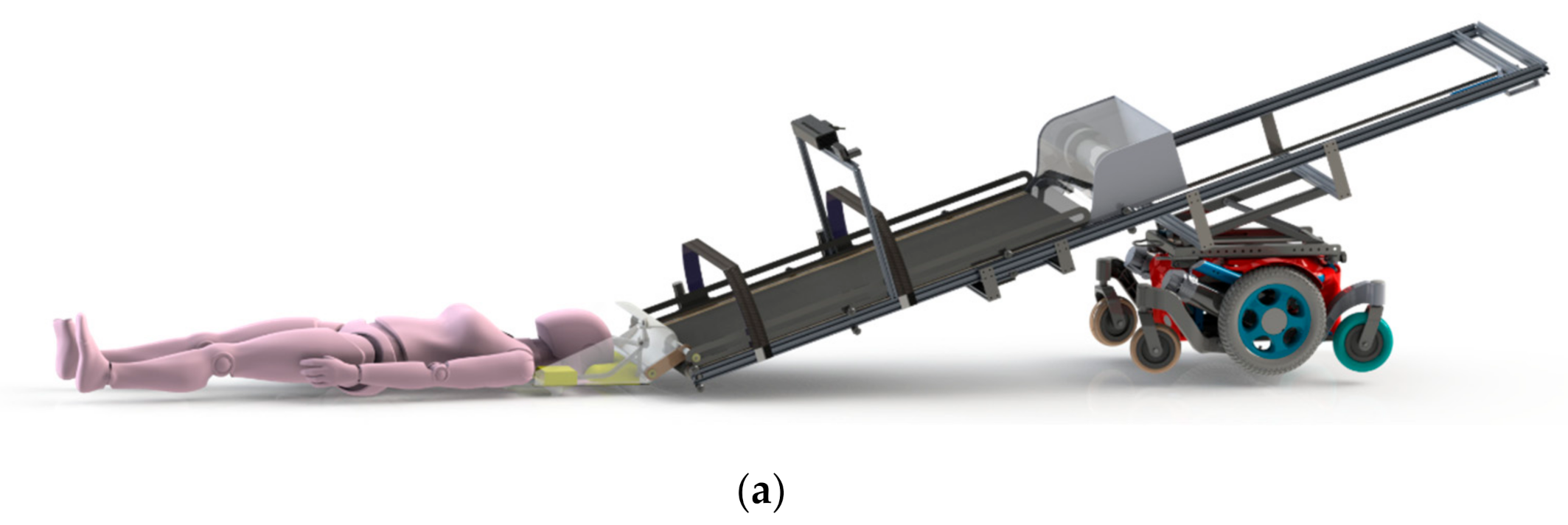
- The novel ResQbot 2.0 design comprises seven main novel components: A differential-drive mobile base; a stretcher bed tilting mechanism; a stretcher bed sliding mechanism; a motorised stretcher bed conveyor module, a pair of motorised stretcher strap modules; and a neck securing device module.
- (2)
- The proposed methodology of casualty extraction procedure using ResQbot 2.0 for safely loading a full-body casualty onto the robot’s ‘stretcher bed’.
- (3)
- Validation of the proposed design and the casualty extraction procedure via simulation experiments in the Gazebo physics engine simulator.
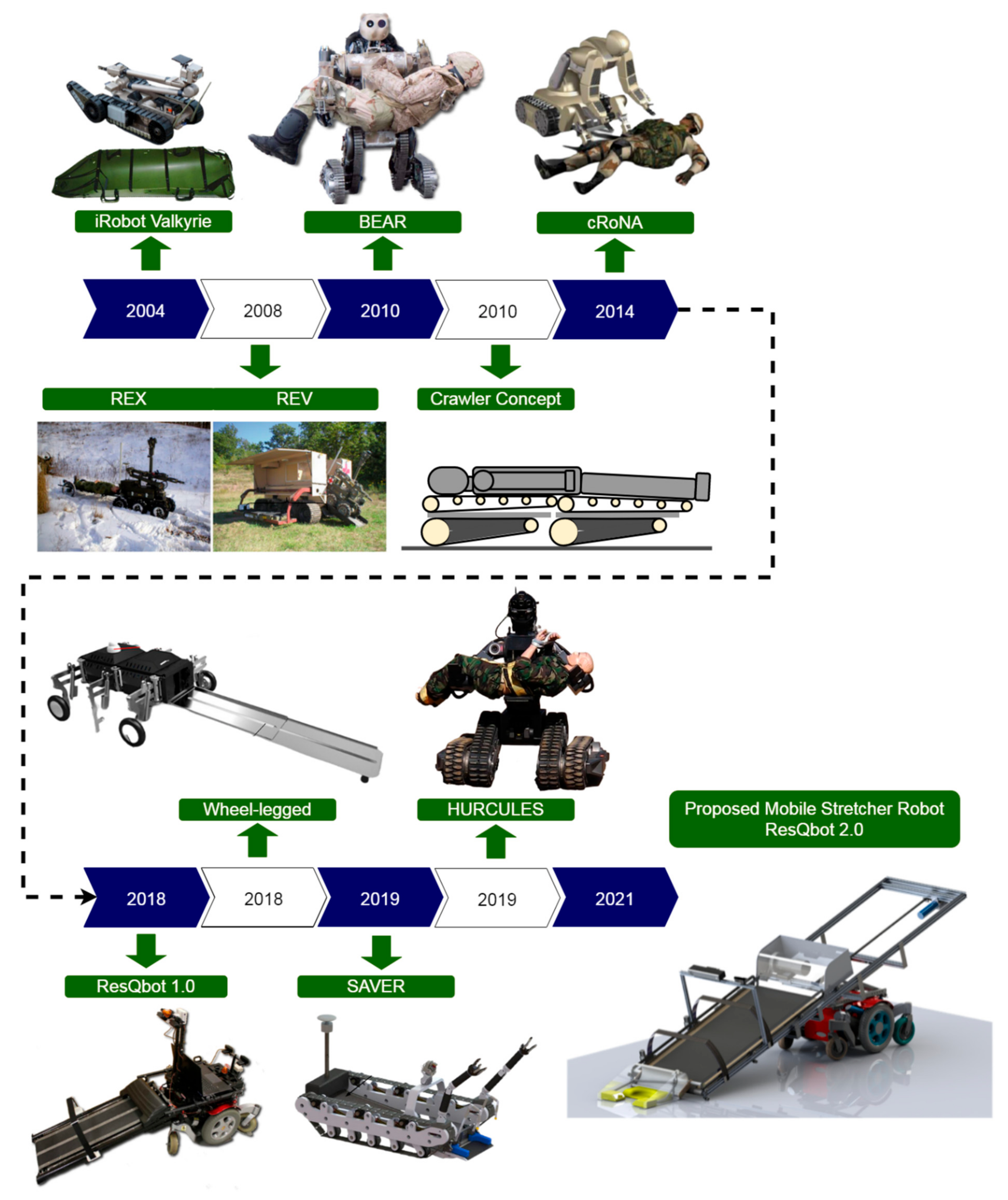
2. Related Work
3. Design Specification
3.1. Design Objectives
- Optimising the design mechanism to safely load a casualty’s entire body onto the robot’s stretcher bed.
- Designing a mechanism that provides more protection to the casualty’s head and neck during the extraction process.
- Optimising the robot’s compact design and manoeuvrability in narrow environments.
3.2. Design Assumptions
- The robot would be working in an urban environment with flat surfaces. Some possible scenarios include areas of gas leaks and radiation/chemical contamination.
- The robot would not have to deal with stairs.
- The casualty would be lying flat with hands at the sides (in readiness for loading the casualty onto the robot).
- The methodology for controlling the ResQbot 2.0 platform (e.g., teleoperation or autonomous modes) lies beyond the scope of this paper.
3.3. Medical Considerations and Research
4. Proposed Design and Method
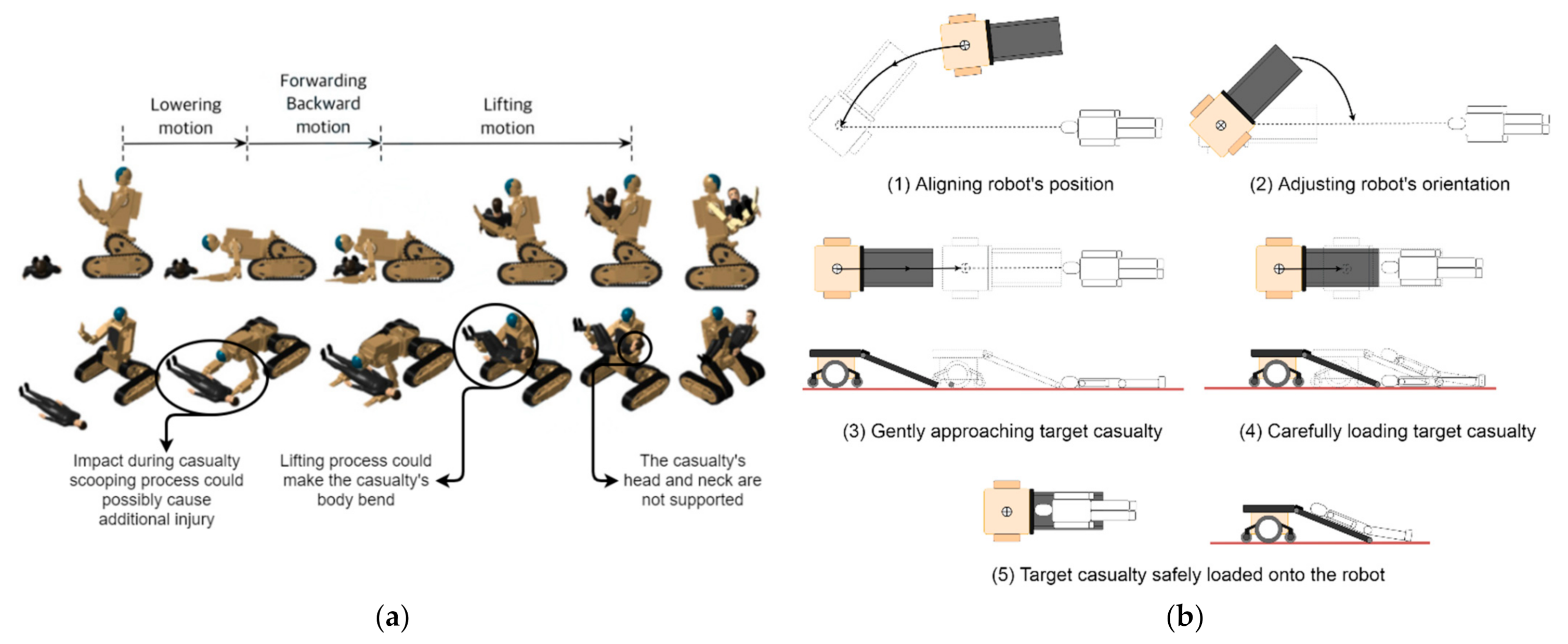
4.1. Proposed Method and Design for Casualty Loading
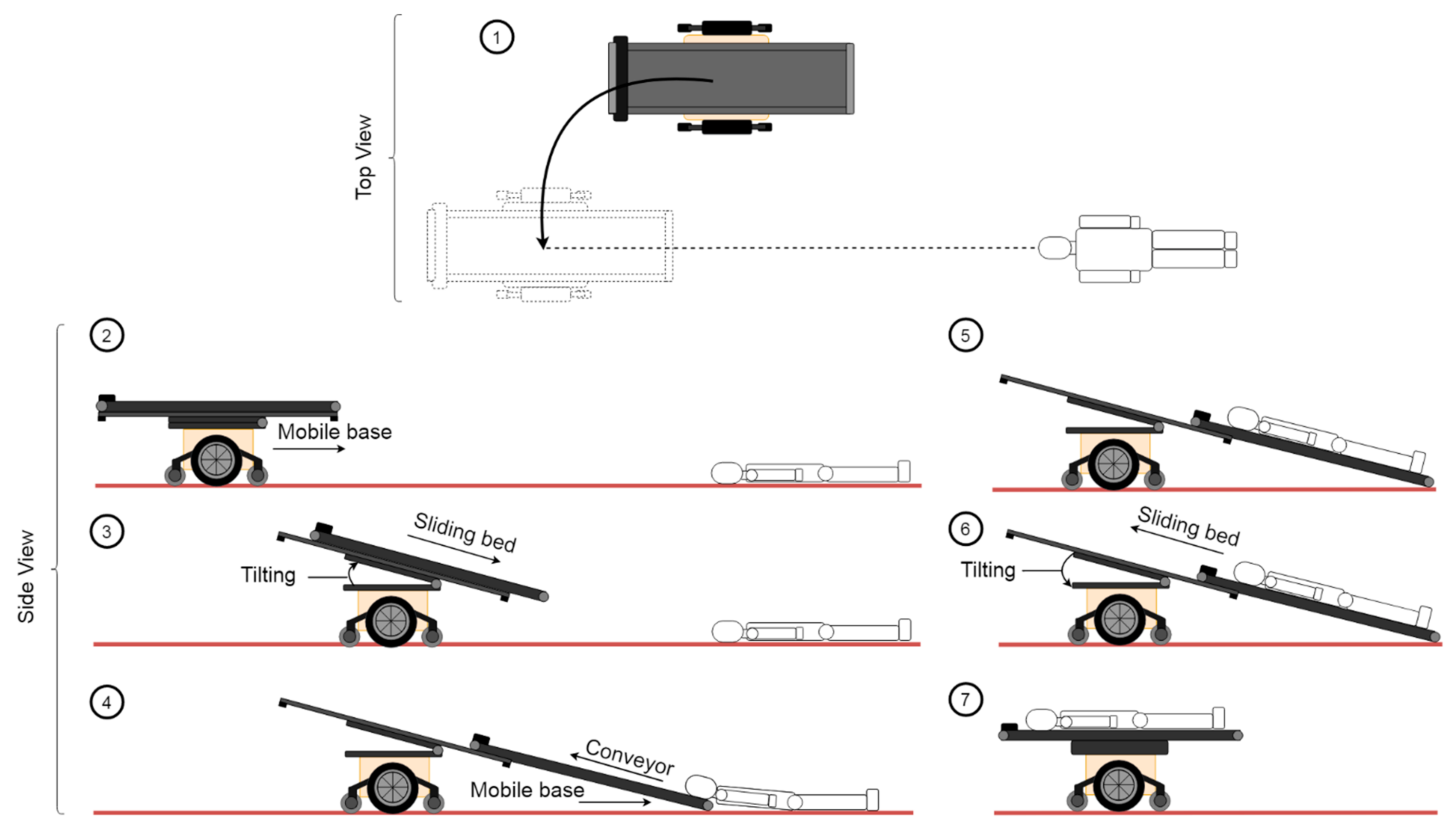
- (1)
- Relative pose adjustment: The robot aligns its relative pose with respect to the victim in preparation for the loco-manipulation routine.
- (2)
- Approaching the target casualty: The robot gently and safely approaches the casualty and makes contact with the casualty’s head to initiate loading.
- (3)
- Changing to the loading configuration (i.e., sliding and tilting the stretcher bed): The robot’s stretcher bed frame tilts up to the desired loading angle and then slides down until it touches the ground in readiness to load the casualty.
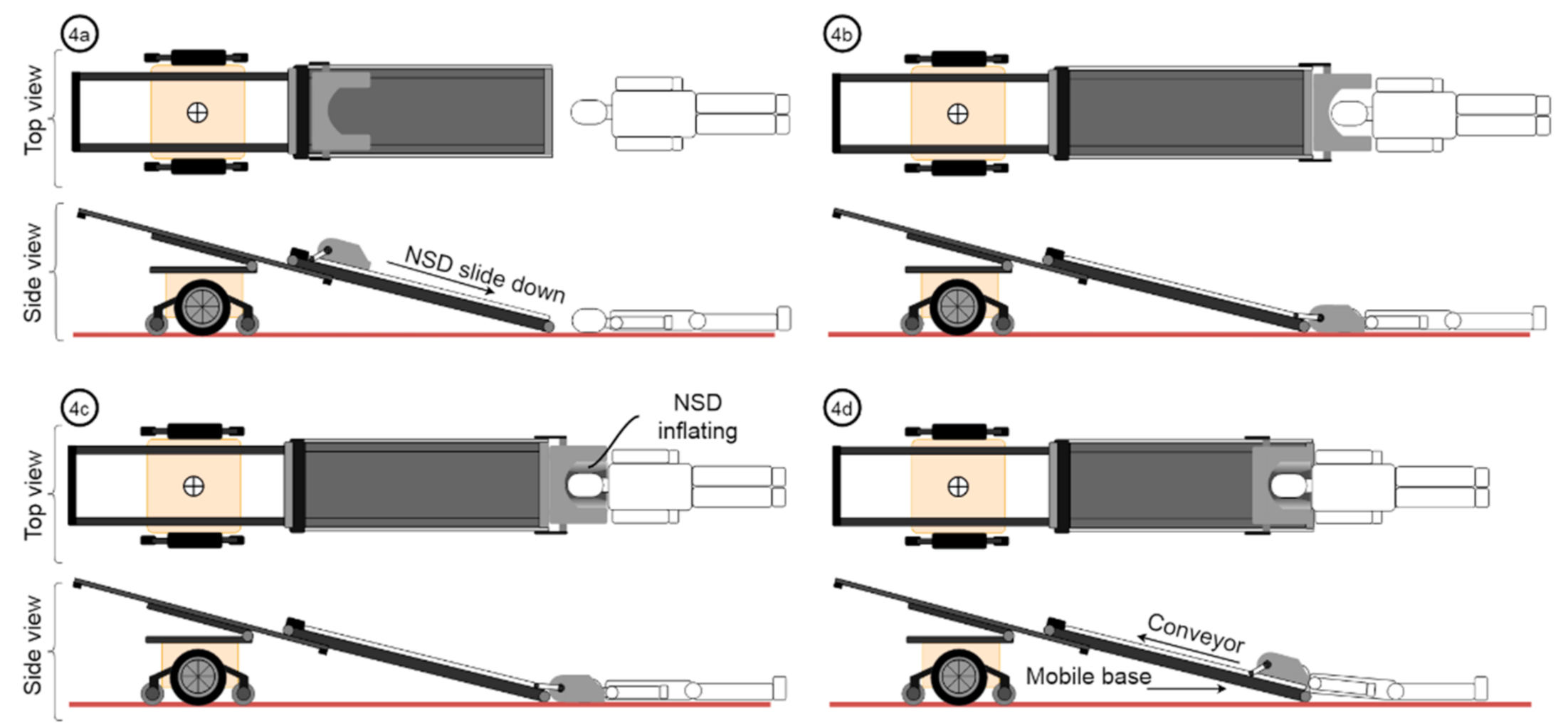
- (4)
- Loading the target casualty: By balancing the movement of the base and the motion of the belt conveyor, the robot smoothly loads the casualty onboard.
- (5)
- Fastening the stretcher strap: Once the casualty is fully onboard, the strapping mechanism secures, stabilises, and immobilises the casualty, minimising the risk of additional harm due to undesired movements.
- (6)
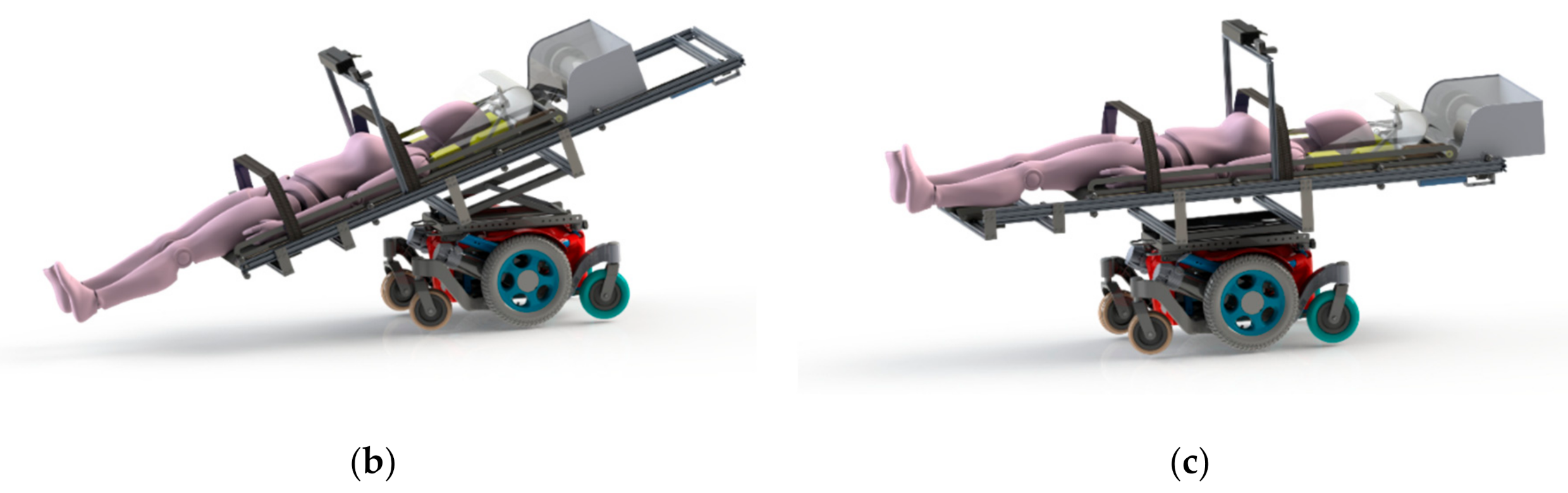
- Changing to the compact configuration: Once the casualty is properly secured, the stretcher bed slides up and tilts down to its original compact configuration.
- (7)
- Transportation: The robot is now ready for the transportation phase. The casualty is brought to the medical area for further treatment.
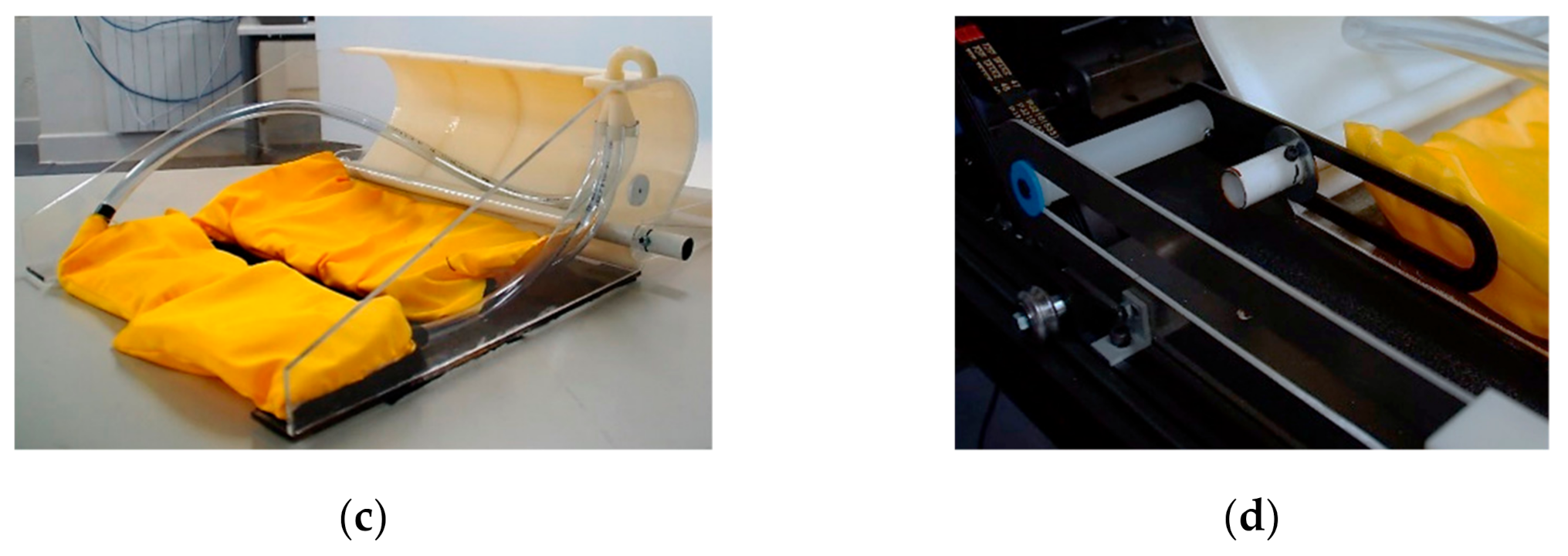
4.2. Neck Securing Device
5. Results and Discussion
5.1. ResQbot 2.0 Design Results
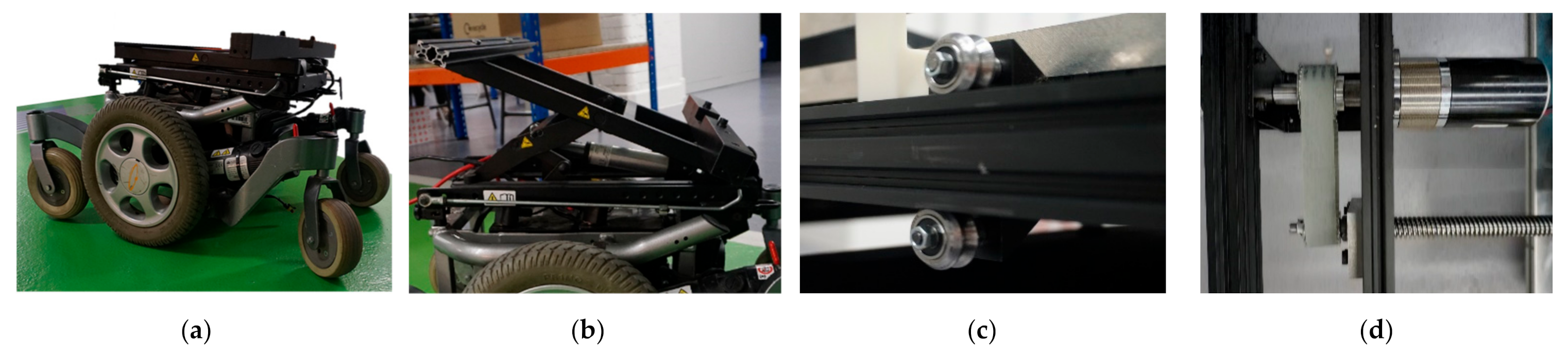
- A differential-drive mobile base that provides mobility and flexible manoeuvrability in typical urban and indoor terrains.
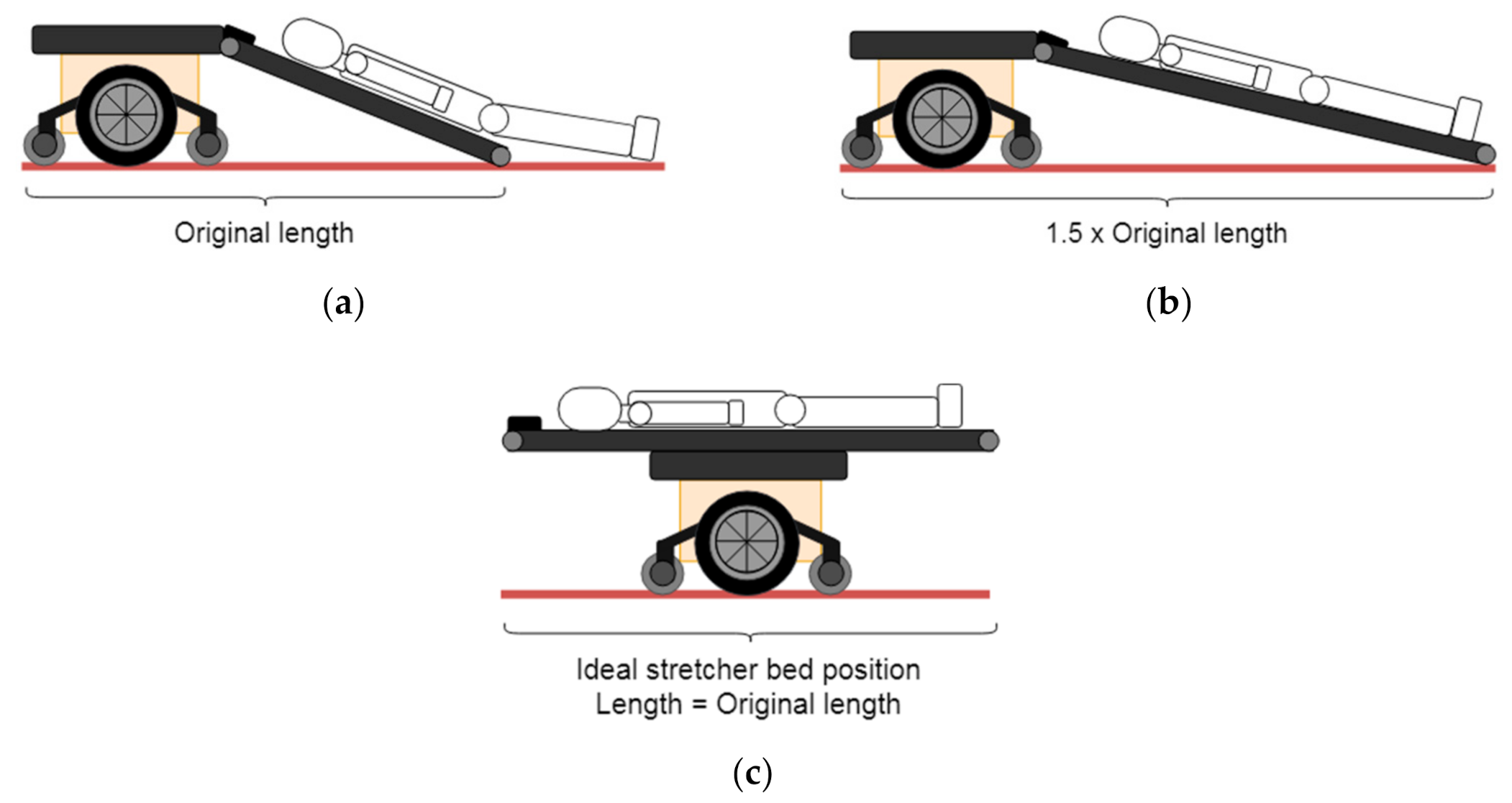
- A stretcher bed tilting module that enables ResQbot 2.0 to adjust the optimal loading angle for safe casualty extraction procedures. This module is driven by a linear actuator, and a bar linkage mechanism adjusts the bed’s tilting angle.
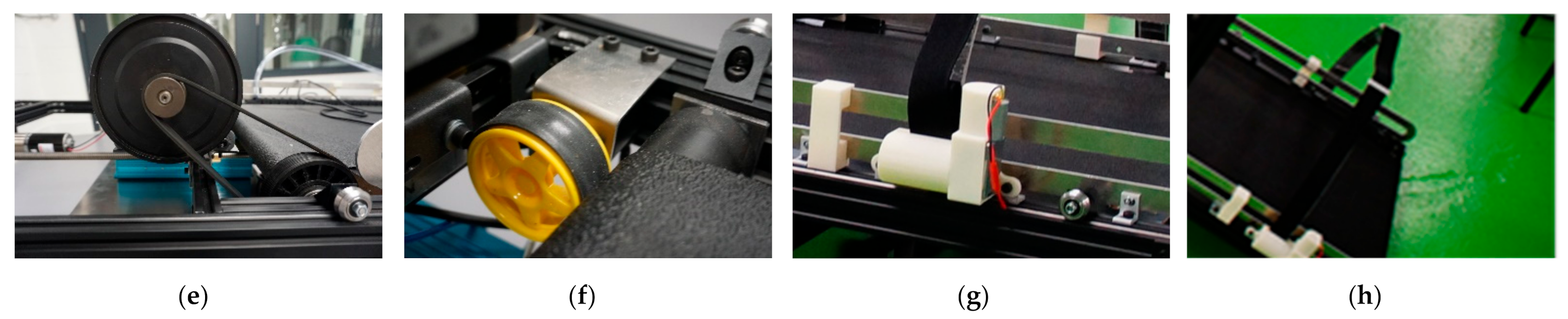
- A stretcher bed sliding module that enables the robot’s stretcher bed to slide up and down in order to switch between the loading configuration (for loading a casualty) and the compact configuration (for general robot navigation and casualty transportation). This module consists of rail mechanisms at both sides of the robot’s stretcher bed that allow the bed to slide smoothly along its frame and a lead-screw mechanism that drives the bed’s linear movement.
- A pair of motorised stretcher strap modules that enable ResQbot 2.0 to secure, stabilise, and immobilise the casualty on the robot’s stretcher bed in order to prevent any undesired movement that could cause additional harm to the casualty.
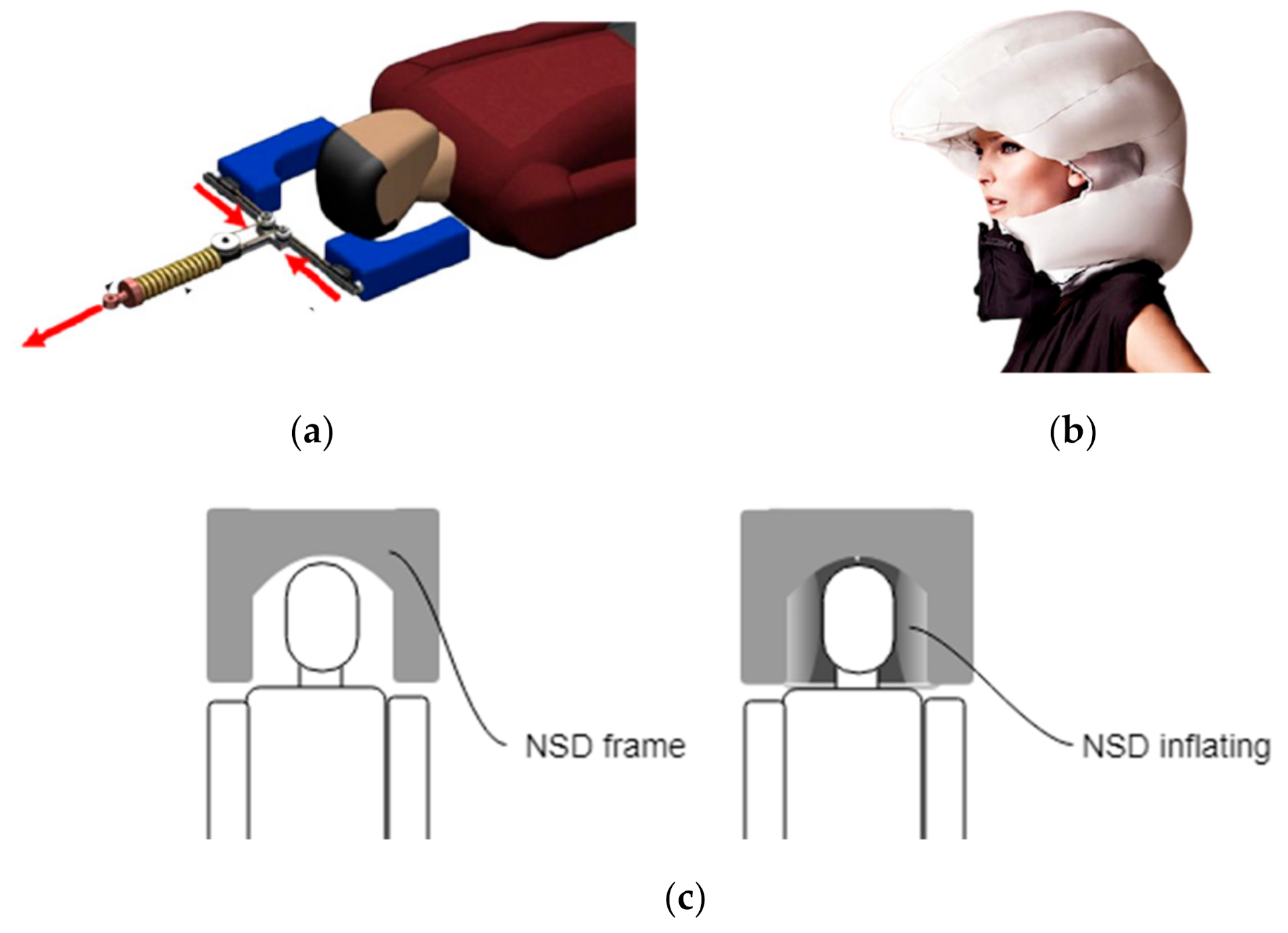
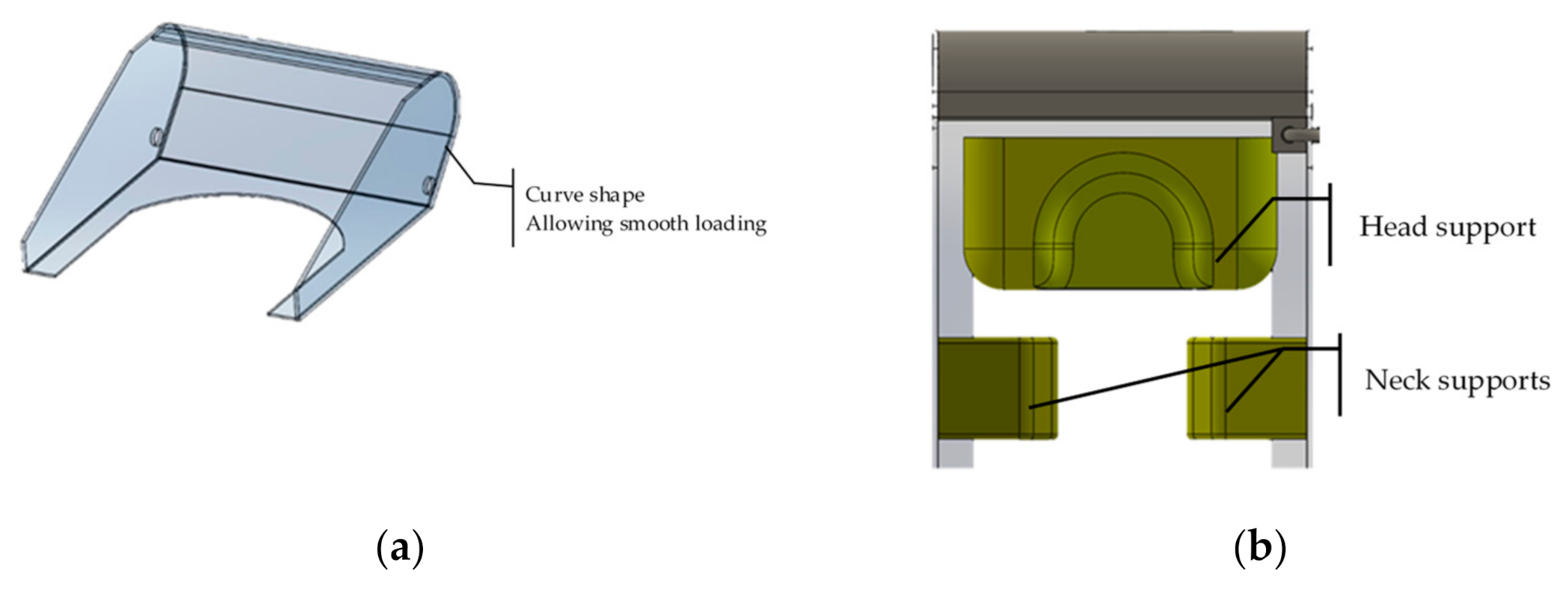
- A neck securing device module that consists of a rigid frame and several components that inflate and surround the casualty’s head and neck up to the shoulders in order to prevent any undesired impact during the casualty loading procedure. It also stabilises and immobilises the casualty’s head and neck during the extraction process.
5.2. The ResQbot 2.0 Assembly
5.2.1. Differential-Drive Mobile Base
5.2.2. Stretcher Bed Tilting Module
5.2.3. Stretcher Bed Sliding Module
5.2.4. Stretcher Bed Conveyor Belt Mechanism
5.2.5. Stretcher Strap Mechanism
5.2.6. Neck Securing Device Module
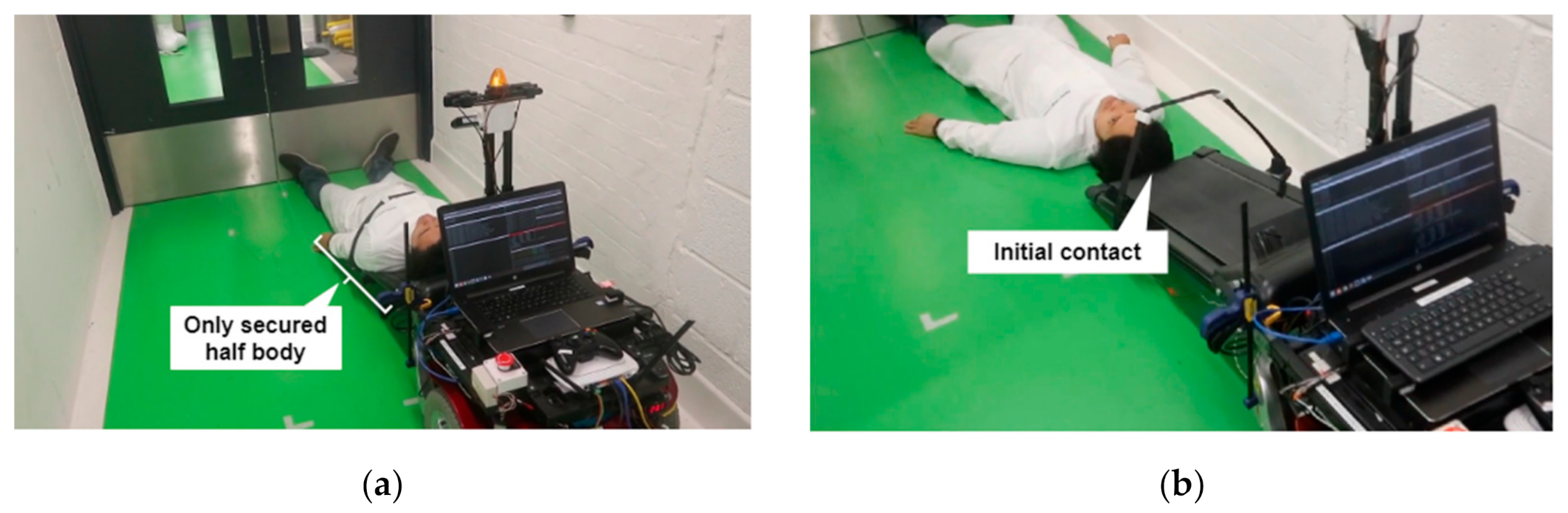
5.3. ResQbot 2.0 Casualty Extraction Simulation
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SAR | Search and Rescue |
| CBRN | Chemical, Biological, Radiological, and Nuclear |
| TAGS | Tactical Amphibious Ground Support System |
| REX | Robotic Extraction |
| REV | Robotic Evacuation |
| NSD | Neck Securing Device |
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
References
- Dinh, M.M.; Bein, K.; Roncal, S.; Byrne, C.M.; Petchell, J.; Brennan, J. Redefining the Golden Hour for Severe Head Injury in an Urban Setting: The Effect of Prehospital Arrival Times on Patient Outcomes. Injury 2013, 44, 606–610. [Google Scholar] [CrossRef] [PubMed]
- Harmsen, A.M.K.; Giannakopoulos, G.F.; Moerbeek, P.R.; Jansma, E.P.; Bonjer, H.J.; Bloemers, F.W. The Influence of Prehospital Time on Trauma Patients Outcome: A Systematic Review. Injury 2015, 46, 602–609. [Google Scholar] [CrossRef] [PubMed]
- Lerner, E.B.; Moscati, R.M. The Golden Hour: Scientific Fact or Medical “Urban Legend”? Acad. Emerg. Med. 2001, 8, 758–760. [Google Scholar] [CrossRef] [PubMed]
- Williams, A.; Sebastian, B.; Ben-Tzvi, P. Review and Analysis of Search, Extraction, Evacuation, and Medical Field Treatment Robots. J. Intell. Robot. Syst. 2019, 96, 401–418. [Google Scholar] [CrossRef]
- Murphy, R.R.; Tadokoro, S.; Nardi, D.; Jacoff, A.; Fiorini, P.; Choset, H.; Erkmen, A.M. Search and Rescue Robotics. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1151–1173. ISBN 978-3-540-30301-5. [Google Scholar]
- Yoo, A.C.; Gilbert, G.R.; Broderick, T.J. Military Robotic Combat Casualty Extraction and Care. In Surgical Robotics: Systems Applications and Visions; Rosen, J., Hannaford, B., Satava, R.M., Eds.; Springer: Boston, MA, USA, 2011; pp. 13–32. ISBN 978-1-4419-1126-1. [Google Scholar]
- Theobald, D. Mobile Extraction-Assist Robot. U.S. Patent 7719222B2, 18 May 2010. [Google Scholar]
- Hu, J.; Lim, Y.-J. Robotic First Responder System and Method. U.S. Patent 20140150806A1, 5 June 2014. [Google Scholar]
- Delmerico, J.; Mintchev, S.; Giusti, A.; Gromov, B.; Melo, K.; Horvat, T.; Cadena, C.; Hutter, M.; Ijspeert, A.; Floreano, D.; et al. The Current State and Future Outlook of Rescue Robotics. J. Field Robot. 2019, 36, 1171–1191. [Google Scholar] [CrossRef]
- West, C.; Arvin, F.; Cheah, W.; West, A.; Watson, S.; Giuliani, M.; Lennox, B. A Debris Clearance Robot for Extreme Environments. In Towards Autonomous Robotic Systems; Althoefer, K., Konstantinova, J., Zhang, K., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 148–159. [Google Scholar]
- Mandow, A.; Serón, J.; Pastor, F.; García-Cerezo, A. Experimental Validation of a Robotic Stretcher for Casualty Evacuation in a Man-Made Disaster Exercise. In Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Virtual, 4–6 November 2020; pp. 241–245. [Google Scholar]
- Yeong, S.P.; King, M.; Dol, S.S. A Review on Marine Search and Rescue Operations Using Unmanned Aerial Vehicles. World Acad. Sci. Eng. Technol. Int. J. Mar. Environ. Sci. 2015, 9, 396–399. [Google Scholar]
- Mishra, B.; Garg, D.; Narang, P.; Mishra, V. Drone-Surveillance for Search and Rescue in Natural Disaster. Comput. Commun. 2020, 156, 1–10. [Google Scholar] [CrossRef]
- Quan, A.; Herrmann, C.; Soliman, H. Project Vulture: A Prototype for Using Drones in Search and Rescue Operations. In Proceedings of the 15th International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini, Greece, 29–31 May 2019; pp. 619–624. [Google Scholar] [CrossRef]
- Karaca, Y.; Cicek, M.; Tatli, O.; Sahin, A.; Pasli, S.; Beser, M.F.; Turedi, S. The Potential Use of Unmanned Aircraft Systems (Drones) in Mountain Search and Rescue Operations. Am. J. Emerg. Med. 2018, 36, 583–588. [Google Scholar] [CrossRef]
- McRae, J.N.; Gay, C.J.; Nielsen, B.M.; Hunt, A.P. Using an Unmanned Aircraft System (Drone) to Conduct a Complex High Altitude Search and Rescue Operation: A Case Study. Wilderness Environ. Med. 2019, 30, 287–290. [Google Scholar] [CrossRef]
- Hayley Drones for Search and Rescue. Available online: https://coptrz.com/drone-in-sar-operations/ (accessed on 13 May 2021).
- Dukowitz, Z. Drones in Search and Rescue: 5 Stories Show Casing Ways Search and Rescue Uses Drones to Save Lives. Available online: https://uavcoach.com/search-and-rescue-drones/ (accessed on 13 May 2021).
- Saputra, R.P.; Kormushev, P. Resqbot: A Mobile Rescue Robot with Immersive Teleperception for Casualty Extraction. In Proceedings of the Annual Conference Towards Autonomous Robotic Systems, Bristol, UK, 25–27 July 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 209–220. [Google Scholar]
- Saputra, R.P.; Rakicevic, N.; Kormushev, P. Sim-to-Real Learning for Casualty Detection from Ground Projected Point Cloud Data. arXiv 2019, arXiv:1908.03057. [Google Scholar]
- Saputra, R.P.; Rakicevic, N.; Chappell, D.; Wang, K.; Kormushev, P. Hierarchical Decomposed-Objective Model Predictive Control for Autonomous Casualty Extraction. IEEE Access 2021, 1. [Google Scholar] [CrossRef]
- Saputra, R.P.; Kormushev, P. Casualty Detection from 3D Point Cloud Data for Autonomous Ground Mobile Rescue Robots. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics, SSRR 2018, Philadeplhia, PA, USA, 6–8 August 2018. [Google Scholar]
- Saputra, R.P.; Kormushev, P. ResQbot: A Mobile Rescue Robot for Casualty Extraction. In Proceedings of the Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 239–240. [Google Scholar]
- Wikimedia Commons Spanish Army IRobot PackBot 510 IED Robot. Available online: https://commons.wikimedia.org/wiki/File:IRobot_PackBot_510_E.T..JPG (accessed on 4 June 2021).
- Gilbert, G.R.; Beebe, M.K. United States Department of Defense Research in Robotic Unmanned Systems for Combat Casualty Care; U.S. Department of Defense: Washington, DC, USA, 2010.
- Gilbert, G.; Turner, T.; Marchessault, R. Army Medical Robotics Research; United States Army Medical Research and Materiel Command: Fort Detrick, MD, USA, 2007. [Google Scholar]
- Quick, D. Battlefield Extraction-Assist Robot to Ferry Wounded to Safety. Available online: https://newatlas.com/battlefield-extraction-assist-robot/17059/1/9%0AROBOTICS%0ABattle (accessed on 13 May 2021).
- Ning, M.; Ma, Z.; Chen, H.; Cao, J.; Zhu, C.; Liu, Y.; Wang, Y. Design and Analysis for a Multifunctional Rescue Robot with Four-Bar Wheel-Legged Structure. Adv. Mech. Eng. 2018, 10, 1687814017747399. [Google Scholar] [CrossRef]
- Choi, B.; Lee, W.; Park, G.; Lee, Y.; Min, J.; Hong, S. Development and Control of a Military Rescue Robot for Casualty Extraction Task. J. Field Robot. 2019, 36, 656–676. [Google Scholar] [CrossRef]
- Williams, A.; Sebastian, B.; Ben-Tzvi, P. A Robotic Head Stabilization Device for Medical Transport. Robotics 2019, 8, 23. [Google Scholar] [CrossRef]
- Iwano, Y.; Osuka, K.; Amano, H. Evaluation of Rescue Support Stretcher System. In Proceedings of the 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 245–250. [Google Scholar]
- Yamauchi, B. PackBot: A Versatile Platform for Military Robotics. In Proceedings of the Unmanned Ground Vehicle Technology VI; SPIE: Bellingham, WA,USA, 2004; Volume 5422, pp. 228–237. [Google Scholar]
- Hstar Technology. Hstar Technology Research Programs. Available online: http://hstar.ishopworld.com/solutions/research_programs.html (accessed on 11 May 2021).
- Lee, W.; Lee, Y.; Park, G.; Hong, S.; Kang, Y. A Whole-Body Rescue Motion Control with Task-Priority Strategy for a Rescue Robot. Auton. Robot. 2017, 41, 243–258. [Google Scholar] [CrossRef]
- Choi, B.; Park, G.; Lee, Y. Practical Control of a Rescue Robot While Maneuvering on Uneven Terrain. J. Mech. Sci. Technol. 2018, 32, 2021–2028. [Google Scholar] [CrossRef]
- Iwano, Y.; Osuka, K.; Amano, H. Development of Stretcher Component Robots for Rescue Activity. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 1–3 December 2004; Volume 2, pp. 915–920. [Google Scholar]
- Iwano, Y.; Osuka, K.; Amano, H. Development of Rescue Support Stretcher System. In Proceedings of the 2010 IEEE Safety Security and Rescue Robotics, Bremem, Germany, 26–30 July 2010; pp. 1–6. [Google Scholar]
- Iwano, Y.; Osuka, K.; Amano, H. Development of Rescue Support Stretcher System with Stair-Climbing. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 245–250. [Google Scholar]
- Miyazawa, K. Fire Robots Developed by the Tokyo Fire Department. Adv. Robot. 2002, 16, 553–556. [Google Scholar] [CrossRef]
- Sebastian, B.; Williams, A.; Ben-Tzvi, P. Control of a Head Stabilization System for Use in Robotic Disaster Response. In Proceedings of the ASME 2017 International Mechanical Engineering Congress and Exposition IMECE2017, Tampa, FL, USA, 3–9 November 2017. [Google Scholar]
- Sebastian, B. Traversability Estimation Techniques for Improved Navigation of Tracked Mobile Robots. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2019. [Google Scholar]
- Williams, A.J. A Robotic Head Stabilization Device for Post-Trauma Transport. Master’s Thesis, Virginia Tech, Blacksburg, VA, USA, 2018. [Google Scholar]
- Engsberg, J.R.; Standeven, J.W.; Shurtleff, T.L.; Tricamo, J.M.; Landau, W.M. Spinal Cord and Brain Injury Protection: Testing Concept for a Protective Device. Spinal Cord 2009, 47, 634–639. [Google Scholar] [CrossRef]
- Payne, A.R.; Patel, S. Injury Mechanisms & Injury Criteria: Head Injury Mechanisms And Injury Criteria. Available online: http://www.eurailsafe.net/subsites/operas/HTML/Section3/Section3.3frm.htm (accessed on 15 March 2021).
- Herring, C.L. Rescue Carriers and Drags; FETI Drill Guide 14-09; Louisiana State University: Baton Rouge, LA, USA, 2014. [Google Scholar]
- Fire Engineering Training Minutes: Webbing and Victim Drag Techniques. Available online: https://www.fireengineering.com/training/training-minutes-webbing-and-victim-drag-techniques/ (accessed on 1 April 2021).
- Finazzo, S. Carrying & Dragging Techniques—Lets Get Carried Away. Available online: https://www.offgridweb.com/preparation/carrying-dragging-techniques-lets-get-carried-away/ (accessed on 1 April 2021).
- Hann, A. A Photographic Guide to Prehospital Spinal Care; Emergency Technologies: Raleigh, NC, USA, 2004. [Google Scholar]
- Coen, S.D. Spinal Cord Injury: Preventing Secondary Injury. AACN Clin. Issues Crit. Care Nurs. 1992, 3, 44–54. [Google Scholar] [CrossRef]
- Abram, S.; Bulstrode, C. Routine Spinal Immobilization in Trauma Patients: What Are the Advantages and Disadvantages? Surgeon 2010, 8, 218–222. [Google Scholar] [CrossRef]
- Vaillancourt, C.; Stiell, I.G.; Beaudoin, T.; Maloney, J.; Anton, A.R.; Bradford, P.; Cain, E.; Travers, A.; Stempien, M.; Lees, M. The Out-of-Hospital Validation of the Canadian C-Spine Rule by Paramedics. Ann. Emerg. Med. 2009, 54, 663–671. [Google Scholar] [CrossRef]
- Connell, R.A.; Graham, C.A.; Munro, P.T. Is Spinal Immobilisation Necessary for All Patients Sustaining Isolated Penetrating Trauma? Injury 2003, 34, 912–914. [Google Scholar] [CrossRef]
- Holla, M.; Huisman, J.M.R.; Verdonschot, N.; Goosen, J.; Hosman, A.J.F.; Hannink, G. The Ability of External Immobilizers to Restrict Movement of the Cervical Spine: A Systematic Review. Eur. Spine J. 2016, 25, 2023–2036. [Google Scholar] [CrossRef] [PubMed]
- Stuke, L.E.; Pons, P.T.; Guy, J.S.; Chapleau, W.P.; Butler, F.K.; McSwain, N.E. Prehospital Spine Immobilization for Penetrating Trauma—Review and Recommendations from the Prehospital Trauma Life Support Executive Committee. J. Trauma Acute Care Surg. 2011, 71, 763–770. [Google Scholar] [CrossRef] [PubMed]
- Eastridge, B.J.; Mabry, R.L.; Seguin, P.; Cantrell, J.; Tops, T.; Uribe, P.; Mallett, O.; Zubko, T.; Oetjen-Gerdes, L.; Rasmussen, T.E.; et al. Death on the Battlefield (2001–2011): Implications for the Future of Combat Casualty Care. J. Trauma Acute Care Surg. 2012, 73, S431–S437. [Google Scholar] [CrossRef] [PubMed]
- Kwan, I.; Bunn, F.; Roberts, I.G. Spinal Immobilisation for Trauma Patients. Cochrane Database Syst. Rev. 2001. [Google Scholar] [CrossRef] [PubMed]
- Peck, G.E.; Shipway, D.J.H.; Tsang, K.; Fertleman, M. Cervical Spine Immobilisation in the Elderly: A Literature Review. Br. J. Neurosurg. 2018, 32, 286–290. [Google Scholar] [CrossRef]
- Head Injury Criteria Tolerance Levels. Available online: http://www.eurailsafe.net/subsites/operas/HTML/Section3/Page3.3.1.4.htm (accessed on 15 March 2021).
- Carlström, V. This New Airbag Collar Is a Safer Alternative to the Traditional Bike Helmet—And It’ll Soon Be Available across the Globe. Available online: https://www.businessinsider.com/a-new-inflatable-collar-is-safer-than-the-traditional-bike-helmet-2018-8?r=US&IR=T (accessed on 19 March 2021).
- Nextcrave Hovding Invisible Bike Helmet. Available online: http://www.nextcrave.com/content/999-hovding-invisible-bike-helmet (accessed on 14 May 2021).
- Sareen, H.; Umapathi, U.; Shin, P.; Kakehi, Y.; Ou, J.; Ishii, H.; Maes, P. Printflatables: Printing Human-Scale, Functional and Dynamic Inflatable Objects. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 3669–3680. [Google Scholar]
- Sunrise Medical Salsa M2 Powered Wheelchair. Available online: https://www.sunrisemedical.co.uk/powered-wheelchairs/quickie/power-wheelchairs/quickie-salsa-m2 (accessed on 23 March 2021).
- Ooznest Metal Dual V Wheel. Available online: https://ooznest.co.uk/product/metal-dual-v-wheel (accessed on 23 March 2021).
- ResQbot. Available online: https://www.imperial.ac.uk/robot-intelligence/robots/resqbot/ (accessed on 13 May 2021).
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saputra, R.P.; Rakicevic, N.; Kuder, I.; Bilsdorfer, J.; Gough, A.; Dakin, A.; de Cocker, E.; Rock, S.; Harpin, R.; Kormushev, P. ResQbot 2.0: An Improved Design of a Mobile Rescue Robot with an Inflatable Neck Securing Device for Safe Casualty Extraction. Appl. Sci. 2021, 11, 5414. https://doi.org/10.3390/app11125414
Saputra RP, Rakicevic N, Kuder I, Bilsdorfer J, Gough A, Dakin A, de Cocker E, Rock S, Harpin R, Kormushev P. ResQbot 2.0: An Improved Design of a Mobile Rescue Robot with an Inflatable Neck Securing Device for Safe Casualty Extraction. Applied Sciences. 2021; 11(12):5414. https://doi.org/10.3390/app11125414
Chicago/Turabian StyleSaputra, Roni Permana, Nemanja Rakicevic, Isabelle Kuder, Joel Bilsdorfer, Alexander Gough, Alexandra Dakin, Emma de Cocker, Shaun Rock, Richard Harpin, and Petar Kormushev. 2021. "ResQbot 2.0: An Improved Design of a Mobile Rescue Robot with an Inflatable Neck Securing Device for Safe Casualty Extraction" Applied Sciences 11, no. 12: 5414. https://doi.org/10.3390/app11125414
APA StyleSaputra, R. P., Rakicevic, N., Kuder, I., Bilsdorfer, J., Gough, A., Dakin, A., de Cocker, E., Rock, S., Harpin, R., & Kormushev, P. (2021). ResQbot 2.0: An Improved Design of a Mobile Rescue Robot with an Inflatable Neck Securing Device for Safe Casualty Extraction. Applied Sciences, 11(12), 5414. https://doi.org/10.3390/app11125414