
Texture Identification of Objects Using a Robot Fingertip Module with Multimodal Tactile Sensing Capability


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
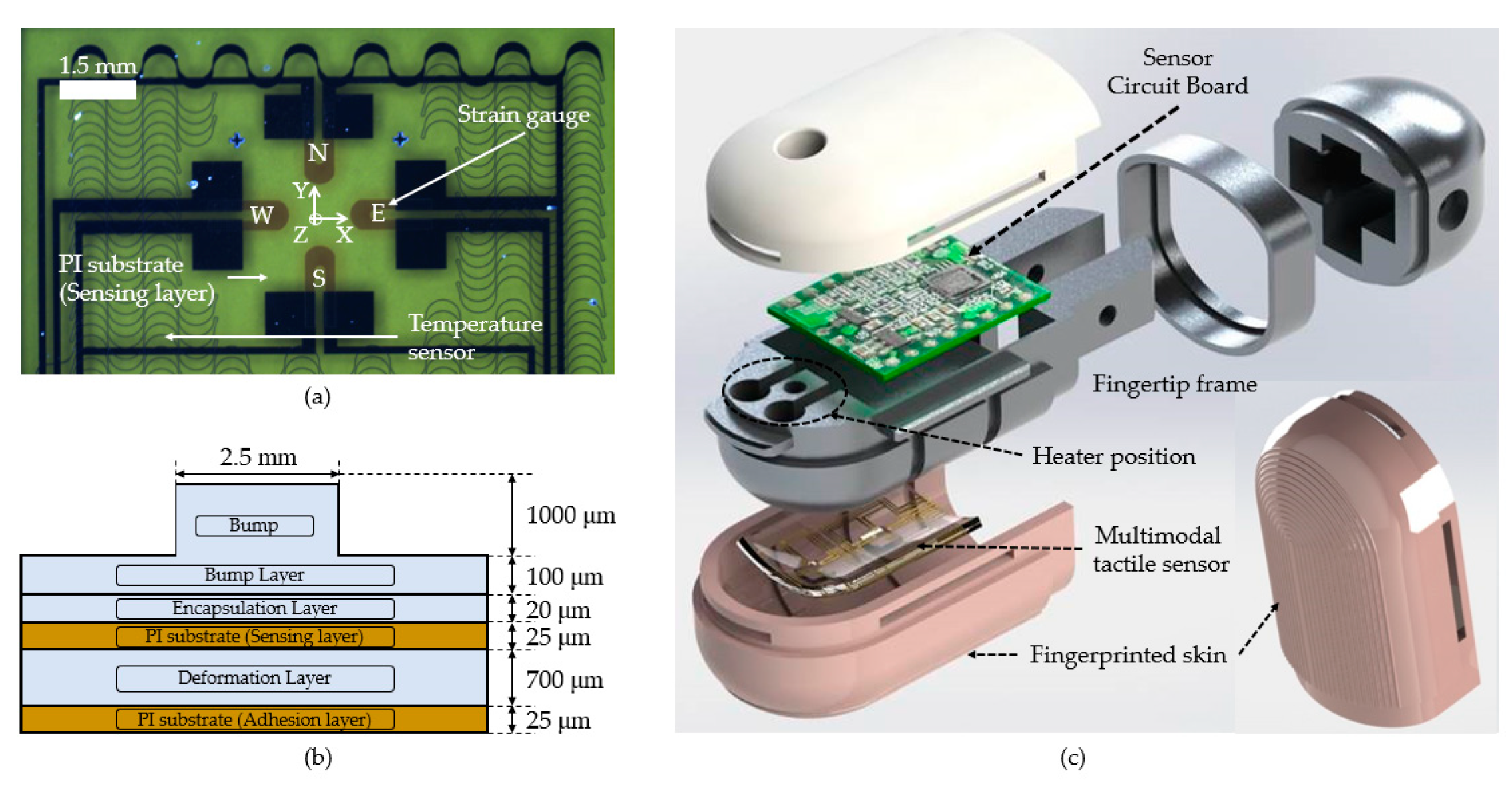
2. Design and Fabrication of the Robot Fingertip Module
3. Experimental Setup & Procedure for Texture Discrimination
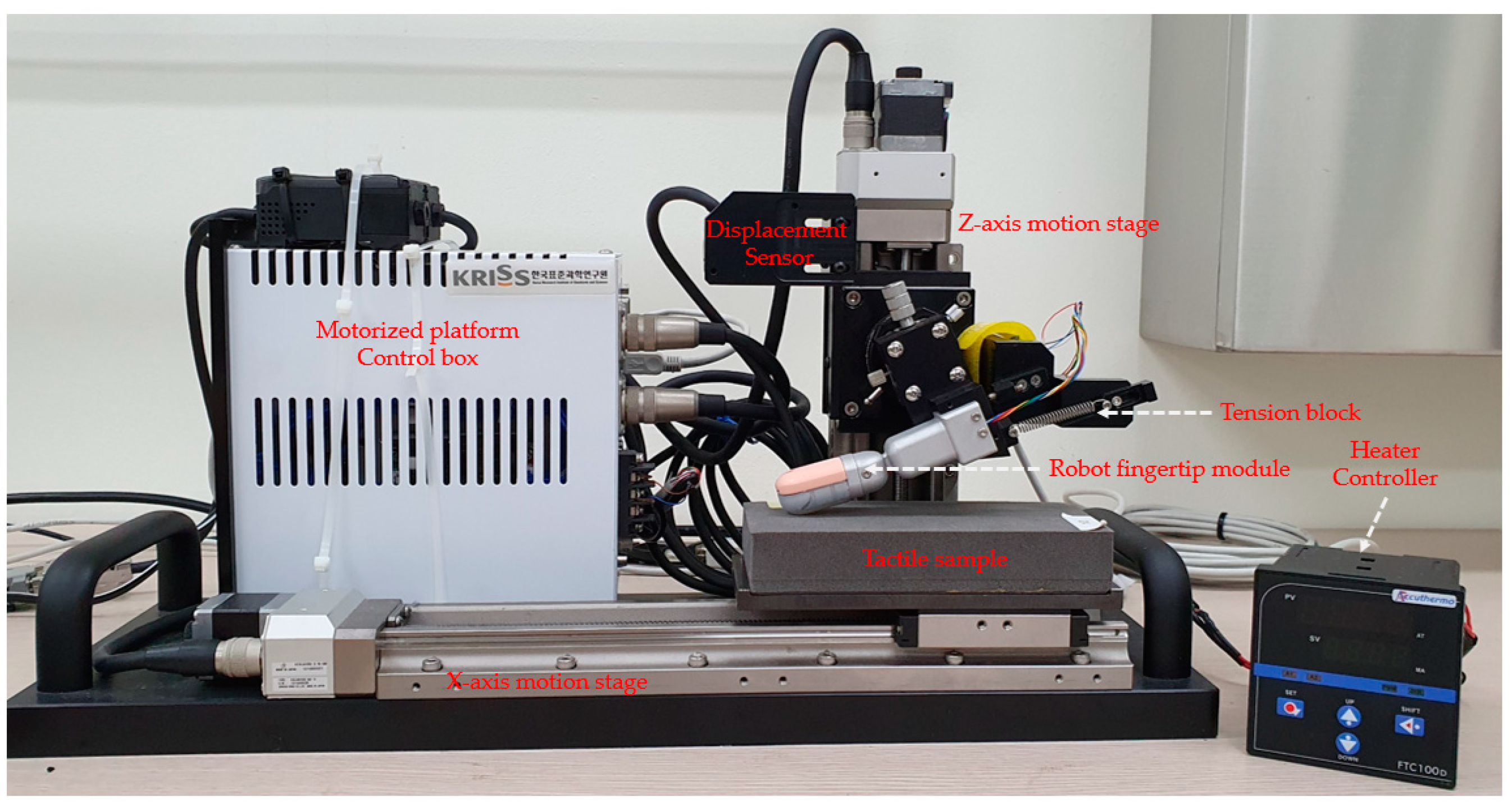
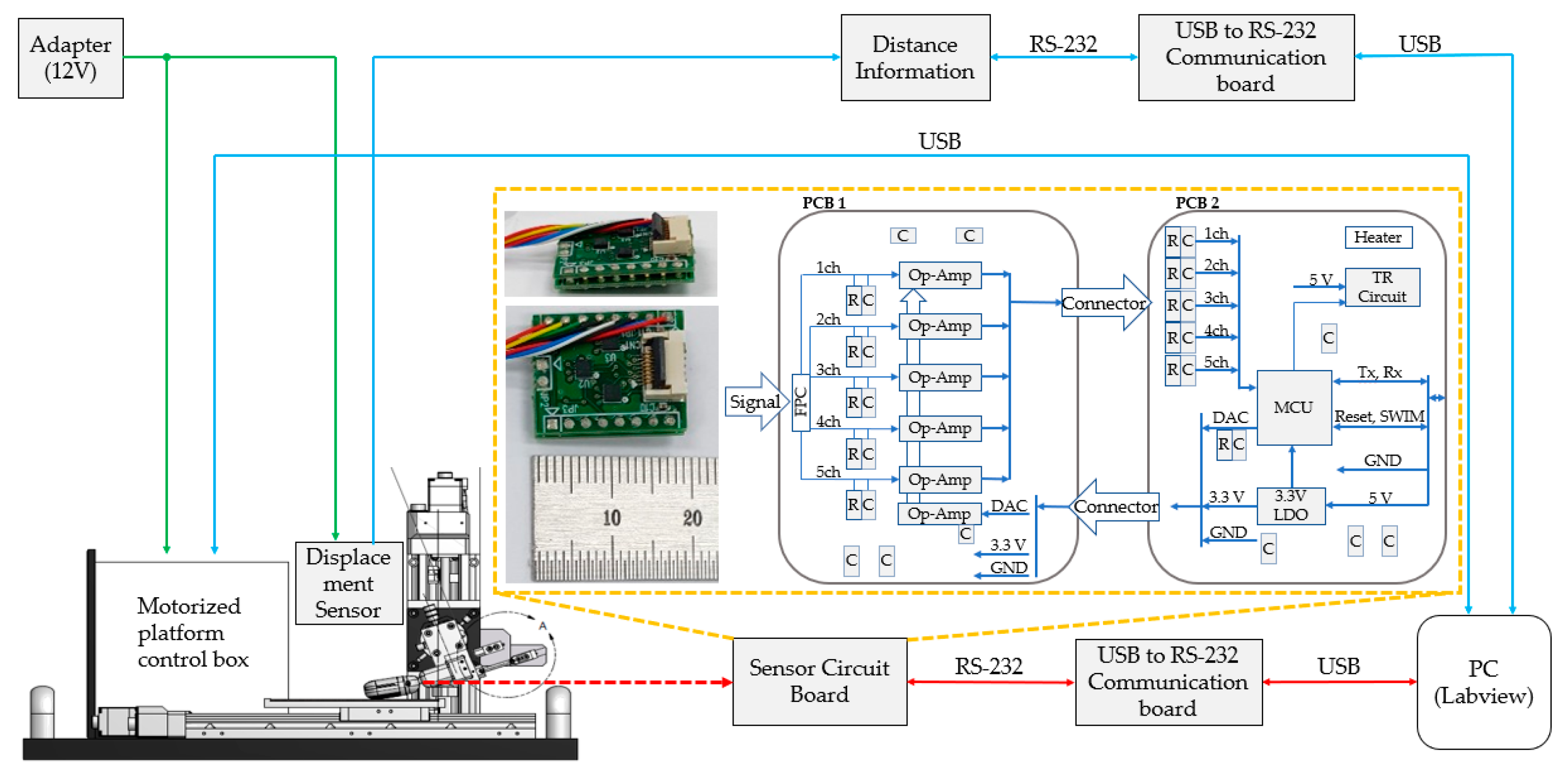
3.1. Experimental Setup
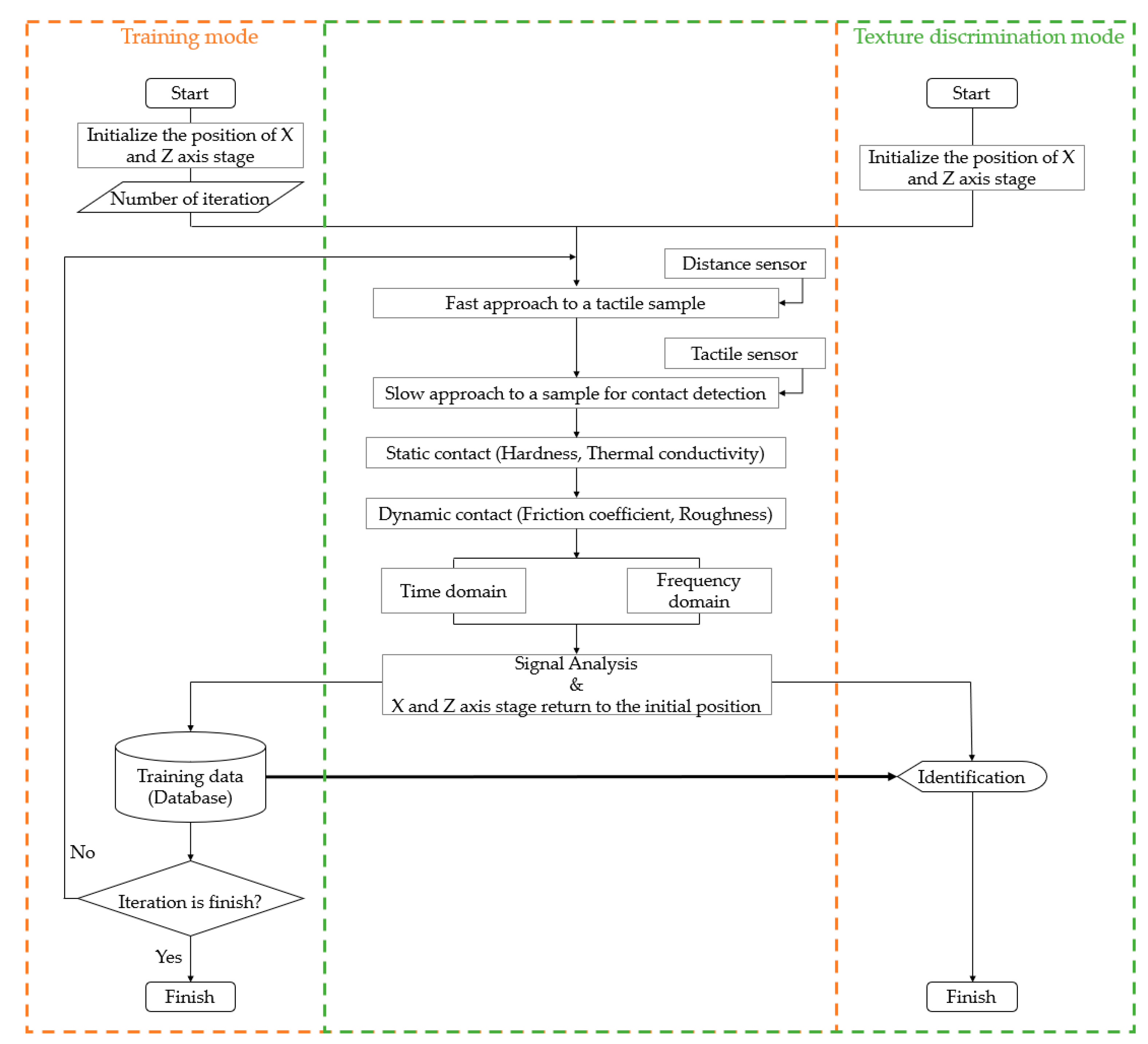
3.2. Experimental Procedure
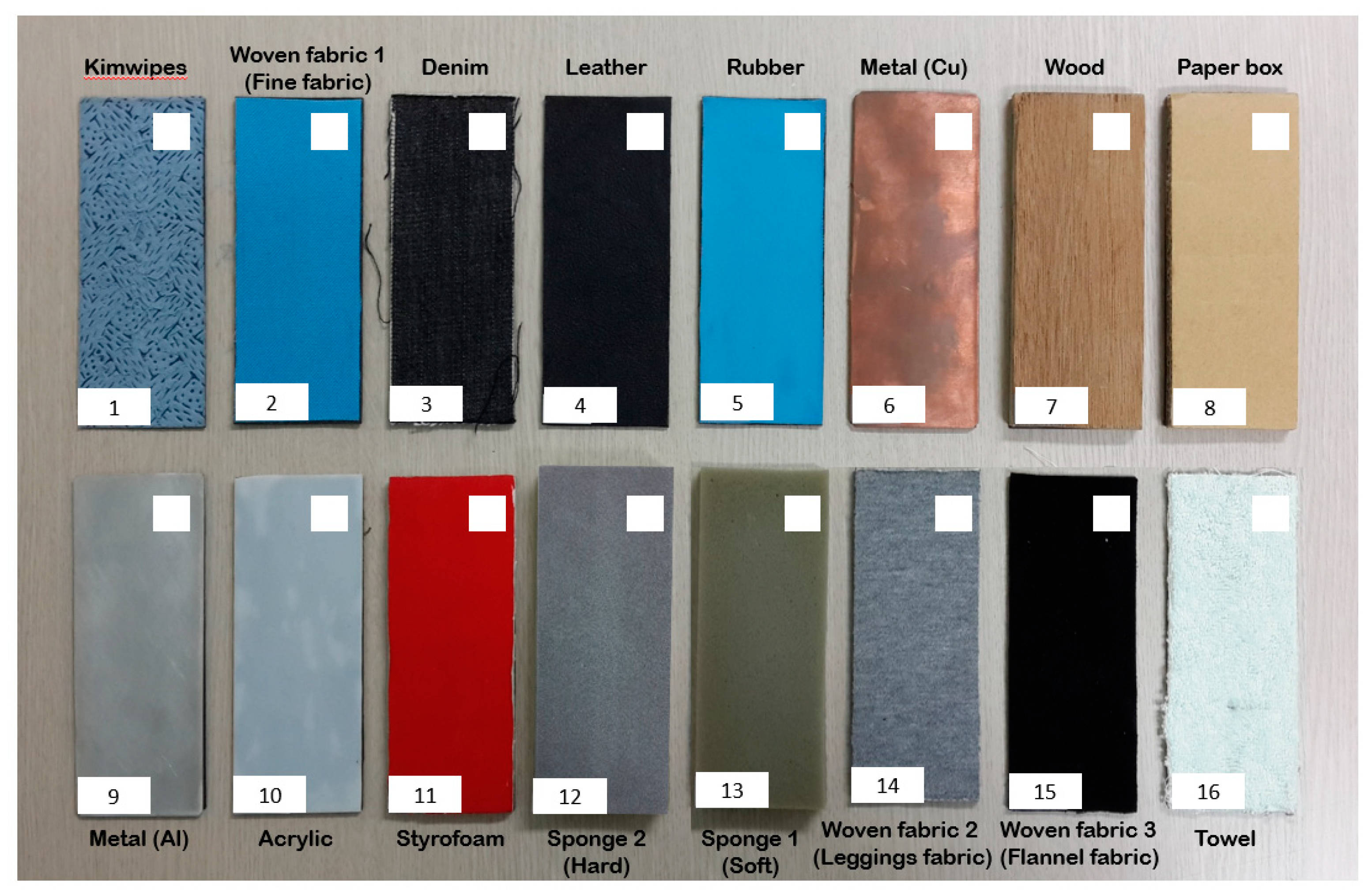
3.3. Texture Samples
4. Results and Discussion
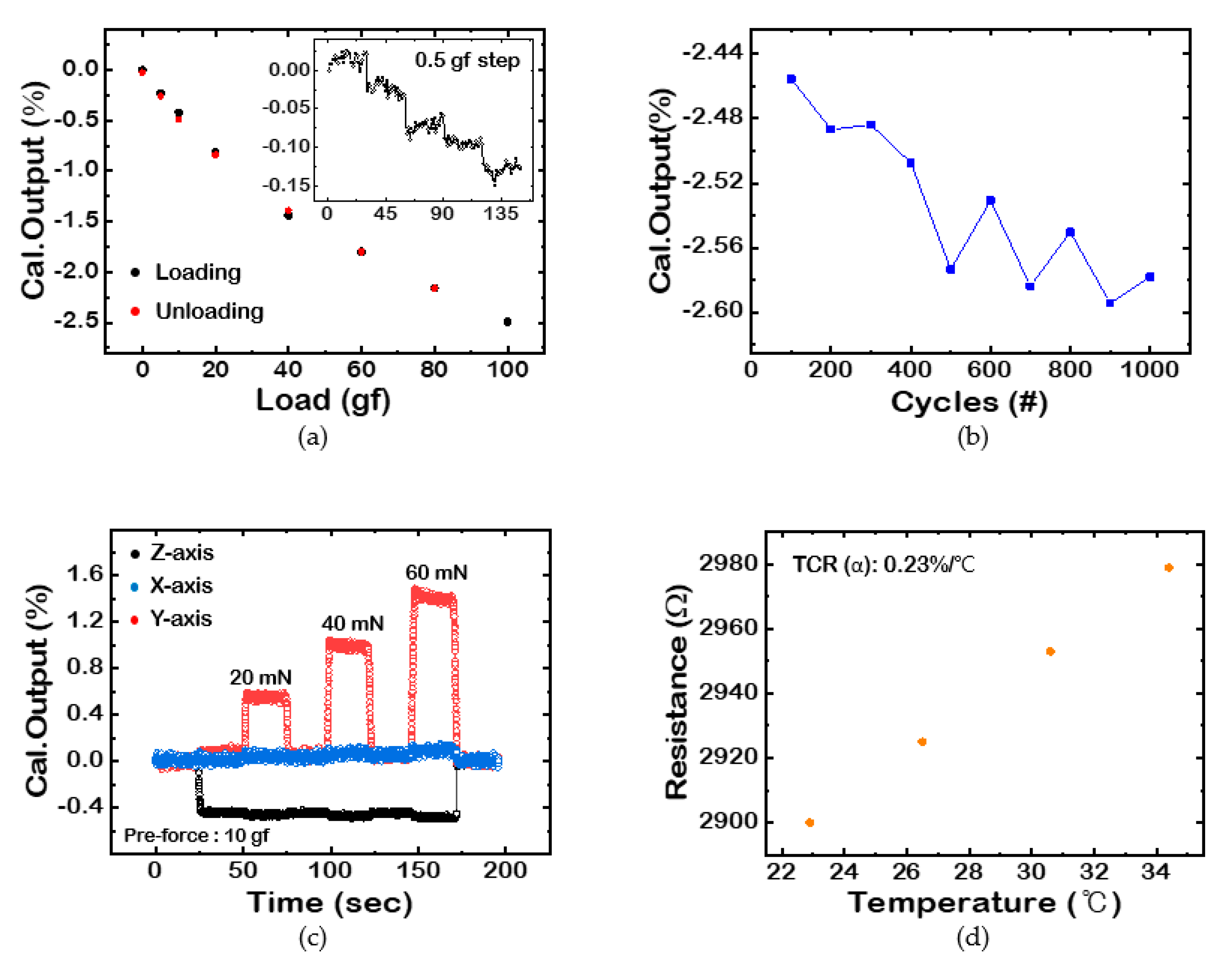
4.1. Multimodal Sensing Capabilities of the Tactile Sensor
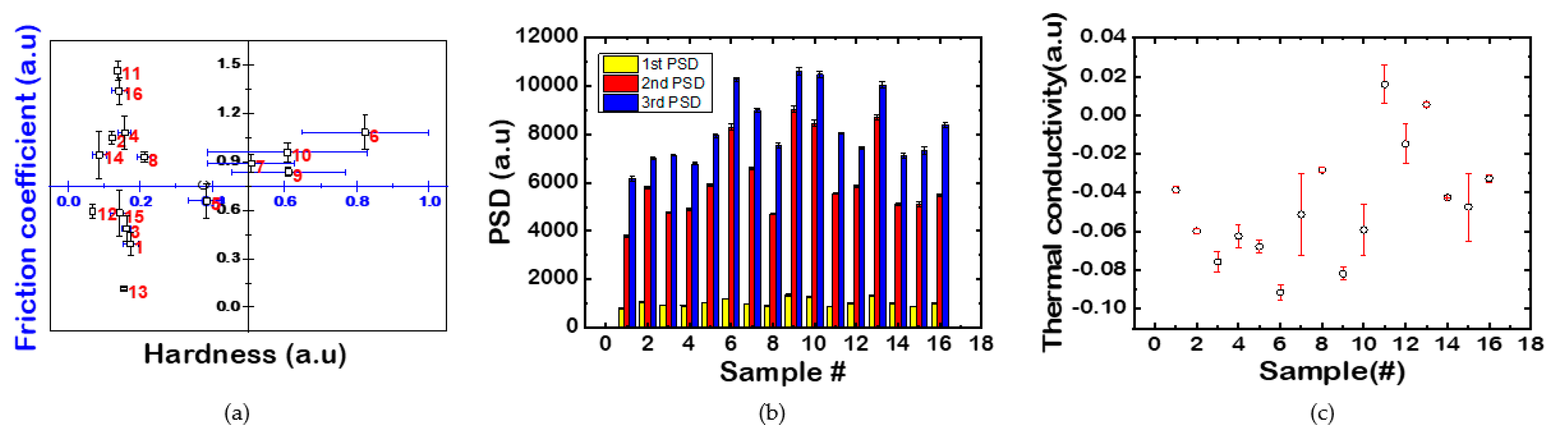
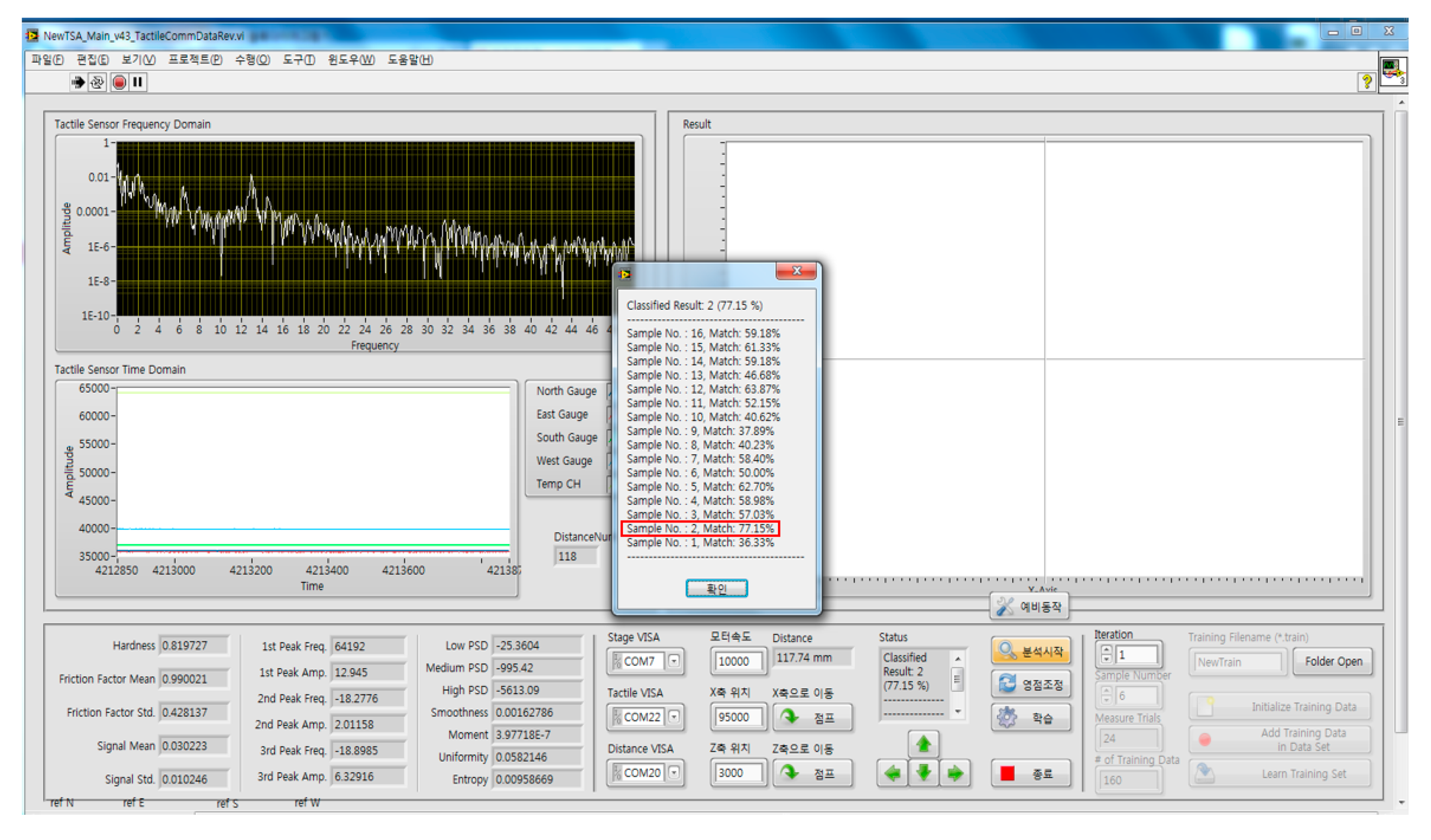
4.2. Demonstration of Texture Discrimination
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Available online: https://www.zins-ziegler-instruments.com/en/product/touchfeel-box/ (accessed on 28 April 2021).
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing—From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Turvey, M.; Carello, C. Dynamic Touch. In Perception of Space and Motion; Elsevier: Amsterdam, The Netherlands, 1995; pp. 401–490. [Google Scholar]
- Lederman, S.J.; Klatzky, R.L. Haptic perception: A tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pont, S.C.; Kappers, A.M.L.; Koenderink, J.J. Similar mechanisms underlie curvature comparison by static and dynamic touch. Percept. Psychophys. 1999, 61, 874–894. [Google Scholar] [CrossRef] [Green Version]
- Chathuranga, D.S.; Hirai, S. Investigation of a biomimetic fingertip’s ability to discriminate fabrics based on surface textures. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 9–12 July 2013. [Google Scholar]
- Chathuranga, K.; Hirai, S. A bio-mimetic fingertip that detects force and vibration modalities and its application to surface identification. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012. [Google Scholar]
- De Oliveira, T.E.A.; Cretu, A.-M.; Petriu, E.M. Multimodal Bio-Inspired Tactile Sensing Module. IEEE Sens. J. 2017, 17, 3231–3243. [Google Scholar] [CrossRef]
- De Oliveira, T.E.A.; Cretu, A.-M.; Petriu, E.M.; De Oliveira, T.A. Multimodal Bio-Inspired Tactile Sensing Module for Surface Characterization. Sensors 2017, 17, 1187. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Adelson, E.H. Sensing and Recognizing Surface Textures Using a GelSight Sensor. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Yuan, W.; Li, R.; Srinivasan, M.A.; Adelson, E.H. Measurement of shear and slip with a GelSight tactile sensor. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 25–30 May 2015. [Google Scholar]
- Yuan, W.; Zhu, C.; Owens, A.; Srinivasan, M.A.; Adelson, E.H. Shape-independent hardness estimation using deep learning and a GelSight tactile sensor. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Marina Bay Sands, Singapore, 29 May–3 June 2017. [Google Scholar]
- Wettels, N.; Santos, V.J.; Johansson, R.S.; Loeb, G. Biomimetic Tactile Sensor Array. Adv. Robot. 2008, 22, 829–849. [Google Scholar] [CrossRef] [Green Version]
- Fishel, J.A.; Loeb, G.E. Bayesian Exploration for Intelligent Identification of Textures. Front. Neurorobotics 2012, 6, 4. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, D.; Loeb, G.; Fishel, J.A. Tactile identification of objects using Bayesian exploration. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Kim, M.-S.; Shin, H.-J.; Park, Y.-K. Design concept of high-performance flexible tactile sensors with a robust structure. Int. J. Precis. Eng. Manuf. 2012, 13, 1941–1947. [Google Scholar] [CrossRef]
- Jang, J.-S.; Kang, T.-H.; Song, H.-W.; Park, Y.-K.; Kim, M.-S. High-Performance Multimodal Flexible Tactile Sensor Capable of Measuring Pressure and Temperature Simultaneously. J. Korean Soc. Precis. Eng. 2014, 31, 683–688. [Google Scholar] [CrossRef]
- Park, M.; Kim, M.-S.; Park, Y.-K.; Ahn, J.-H. Si membrane based tactile sensor with active matrix circuitry for artificial skin applications. Appl. Phys. Lett. 2015, 106, 043502. [Google Scholar] [CrossRef]
- Smith, C.S. Piezoresistance Effect in Germanium and Silicon. Phys. Rev. 1954, 94, 42–49. [Google Scholar] [CrossRef]
- Kanda, Y. Piezoresistance effect of silicon. Sens. Actuators A Phys. 1991, 28, 83–91. [Google Scholar] [CrossRef]
- Yang, S.; Lu, N. Gauge Factor and Stretchability of Silicon-on-Polymer Strain Gauges. Sensors 2013, 13, 8577–8594. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, Y.; Bae, S.; Jang, H.; Jang, S.; Zhu, S.-E.; Sim, S.H.; Song, Y.I.; Hong, B.H.; Ahn, J.-H. Wafer-Scale Synthesis and Transfer of Graphene Films. Nano Lett. 2010, 10, 490–493. [Google Scholar] [CrossRef] [Green Version]
- Fan, J.A.; Yeo, W.-H.; Su, Y.; Hattori, Y.; Lee, W.; Jung, S.-Y.; Zhang, Y.; Liu, Z.; Cheng, H.; Falgout, L.; et al. Fractal design concepts for stretchable electronics. Nat. Commun. 2014, 5, 3266. [Google Scholar] [CrossRef] [Green Version]
- De Paoli, F. Measuring Polydimethylsiloxane (PDMS) Mechanical Properties Using Flat Punch Nanoindentation Focusing on Obtaining Full Contact. Master’s Thesis, University of South Florida, Tempa, FL, USA, 2015. [Google Scholar]
- Hwang, E.-S.; Seo, J.-H.; Kim, Y.-J. A Polymer-Based Flexible Tactile Sensor for Both Normal and Shear Load Detections and Its Application for Robotics. J. Microelectromech. Syst. 2007, 16, 556–563. [Google Scholar] [CrossRef]
- Beccai, L.; Roccella, S.; Arena, A.; Valvo, F.; Valdastri, P.; Menciassi, A.; Carrozza, M.C.; Dario, P. Design and fabrication of a hybrid silicon three-axial force sensor for biomechanical applications. Sensors Actuators A Phys. 2005, 120, 370–382. [Google Scholar] [CrossRef]
- Wang, Z.; Volinsky, A.A.; Gallant, N.D. Crosslinking effect on polydimethylsiloxane elastic modulus measured by custom-built compression instrument. J. Appl. Polym. Sci. 2014, 131. [Google Scholar] [CrossRef] [Green Version]
- Oprişan, C.; Cârlescu, V.; Barnea, A.; Prisacaru, G.; Olaru, D.N.; Plesu, G. Experimental determination of the Young’s modulus for the fingers with application in prehension systems for small cylindrical objects. IOP Conf. Ser. Mater. Sci. Eng. 2016, 147, 012058. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.-L.; Majidi, C.; Kramer, R.K.; Bérard, P.; Wood, R.J. Hyperelastic pressure sensing with a liquid-embedded elastomer. J. Micromech. Microeng. 2010, 20. [Google Scholar] [CrossRef] [Green Version]
- Scheibert, J.; Leurent, S.; Prevost, A.; Debregeas, G. The Role of Fingerprints in the Coding of Tactile Information Probed with a Biomimetic Sensor. Science 2009, 323, 1503–1506. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duffy, D.C.; McDonald, J.C.; Schueller, O.J.; Whitesides, G.M. Rapid Prototyping of Microfluidic Systems in Poly(dimethylsiloxane). Anal. Chem. 1998, 70, 4974–4984. [Google Scholar] [CrossRef] [PubMed]
- Bhattacharya, S.; Datta, A.; Berg, J.M.; Gangopadhyay, S. Studies on surface wettability of poly(dimethyl) siloxane (PDMS) and glass under oxygen-plasma treatment and correlation with bond strength. J. Microelectromech. Syst. 2005, 14, 590–597. [Google Scholar] [CrossRef]
- Lee, H.-K.; Chung, J.; Chang, S.-I.; Yoon, E. Real-time measurement of the three-axis contact force distribution using a flexible capacitive polymer tactile sensor. J. Micromech. Microeng. 2011, 21. [Google Scholar] [CrossRef] [Green Version]
- Akbari, H.; Kazerooni, A. Improving the coupling errors of a Maltese cross-beams type six-axis force/moment sensor using numerical shape-optimization technique. Measurement 2018, 126, 342–355. [Google Scholar] [CrossRef]
- Available online: https://en.wikipedia.org/wiki/Electrical_resistivity_and_conductivity#cite_note-serway-27 (accessed on 28 April 2021).
- Zou, L.; Ge, C.; Wang, Z.J.; Cretu, E.; Li, X. Novel Tactile Sensor Technology and Smart Tactile Sensing Systems: A Review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef] [PubMed]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bok, B.-G.; Jang, J.-S.; Kim, M.-S. Texture Identification of Objects Using a Robot Fingertip Module with Multimodal Tactile Sensing Capability. Appl. Sci. 2021, 11, 5256. https://doi.org/10.3390/app11115256
Bok B-G, Jang J-S, Kim M-S. Texture Identification of Objects Using a Robot Fingertip Module with Multimodal Tactile Sensing Capability. Applied Sciences. 2021; 11(11):5256. https://doi.org/10.3390/app11115256
Chicago/Turabian StyleBok, Bo-Gyu, Jin-Seok Jang, and Min-Seok Kim. 2021. "Texture Identification of Objects Using a Robot Fingertip Module with Multimodal Tactile Sensing Capability" Applied Sciences 11, no. 11: 5256. https://doi.org/10.3390/app11115256
APA StyleBok, B.-G., Jang, J.-S., & Kim, M.-S. (2021). Texture Identification of Objects Using a Robot Fingertip Module with Multimodal Tactile Sensing Capability. Applied Sciences, 11(11), 5256. https://doi.org/10.3390/app11115256