In this section, we present a verification of the methodology described in
Section 3.1. Initially, the methodology is applied to the channel-flow problem. Using several meshes (uniform and non-uniform), the HiGFlow system showed good agreement with the solution obtained with the OpenFOAM system. Results of meshes’ orders and errors are also shown. Lastly, the numerical simulation of contraction flows is presented. The results are compared with solutions of the OpenFOAM system [
26], Freeflow system [
3], Mitsoulis [
14] and Quinzani [
15].
4.1. Mesh Independence in Channel-Flow
The numerical method described in
Section 3 was applied to simulate the flow of a KBKZ fluid in a 2D planar channel (see
Figure 4) of length
and height
L, where
m. At the channel entrance, a dimensionless parabolic velocity profile given by
was used. The scaling parameters were the centerline velocity,
ms
−1, and the fluid simulated was FLUID S1, whose parameters are described in
Table 2. In this flow, we had
,
,
,
and the number of deformation fields was
.
In order to verify the mesh convergence of the results, the flow was simulated using several meshes (see
Table 3 and
Table 4 and
Figure 5).
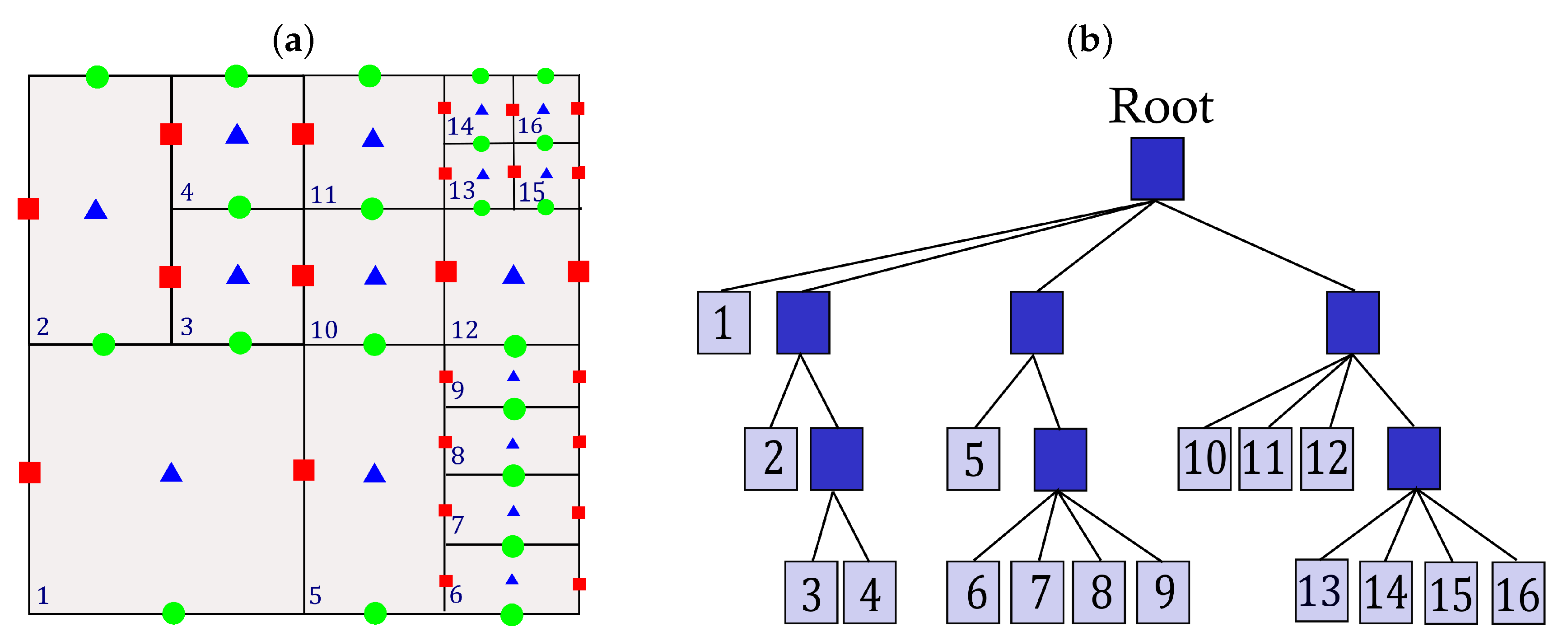
Figure 5 shows the non-uniform meshes, where we can see the structure of the mesh. In
Figure 5a, the mesh
(with two levels of refinement) is depicted, and in
Figure 5b, we can see the mesh
(with three levels of refinement).
The
u-profiles are illustrated in
Figure 6, where the mesh convergence can be seen. We adopted mesh
as a reference mesh (black line) and the solutions of the refined meshes (full symbols) and uniform meshes (empty symbols) are shown. In this figure, we also show the OpenFoam system profile using the mesh MV. We saw good agreement between the solutions obtained in both systems.
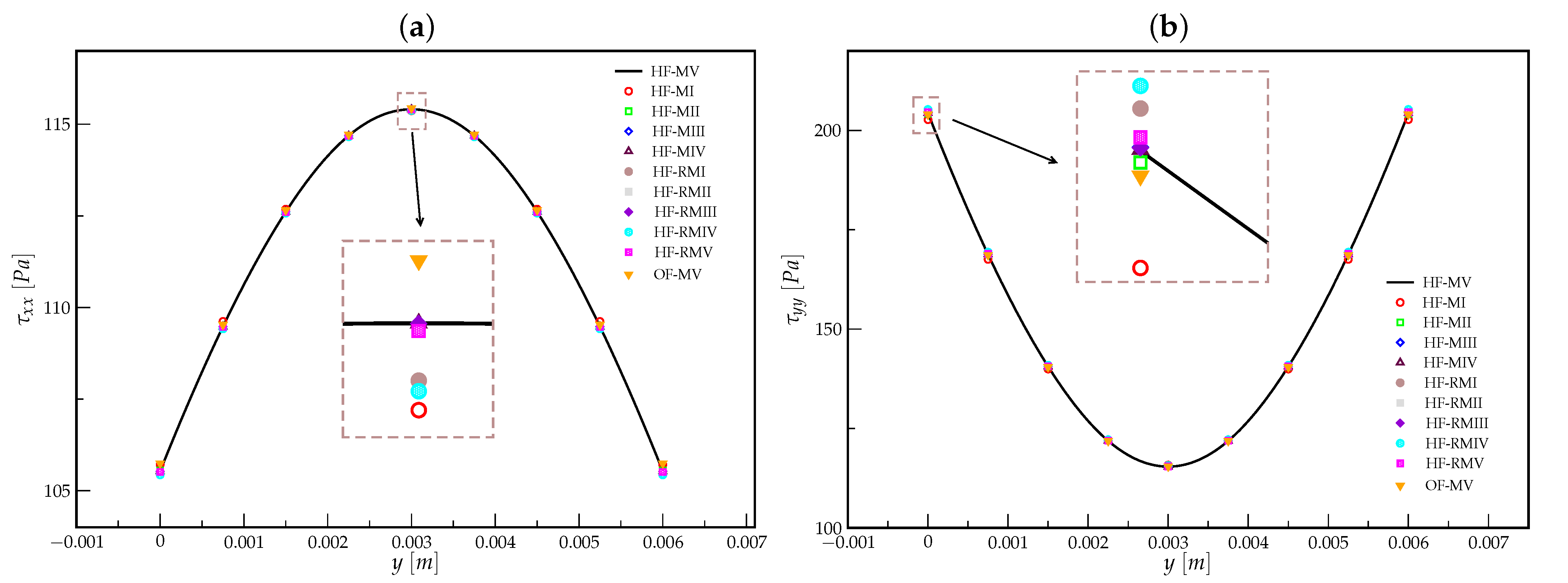
Our results for the tensor components
and
are presented in
Figure 7, where we can also see good agreement between the numerical solutions of the HiGFlow and the OpenFOAM systems.
To verify the convergence, we show the errors (
,
,
) and the orders in
Table 5. The errors are calculated using the following equations:
where
is the solution in mesh
and
is the solution in meshes
and
,
is the
profile in points
in which
and
,
. The orders
Q for uniform meshes
show values close to 2 (
), which is the correct value that we expected to observe, since the velocity is calculated using an implicit Euler method. The values
and
are the errors (in the norms
,
or
) for two consecutive meshes (the
value in
is lower than in
) and
and
are the
values in their respective meshes.
4.2. Numerical Simulation of 4:1 Abrupt Planar Contraction Problem
In this section, we show the simulations for the 4:1 abrupt planar contraction flow. This problem is interesting because, for instance, the flow near the contraction is a complex mixture of shear and elongation, and secondary fluid motions might exist, even in the Newtonian limit (see [
15]). For this reason, contraction flows have been extensively studied previously in the literature (see [
3,
14,
15,
26]).
Figure 8 shows the domain representation, where we adopted a dimensionless parabolic inlet velocity profile
. The scaling parameter
m is the height of the small channel, and we used
deformation fields,
and the time interval
s. In
Table 6, we report the scaling parameters of average velocity
used in all simulations and the dimensionless parameters
,
,
(see [
15]) and the characteristic shear rate
.
The mesh
used in these simulations is shown in
Figure 9. We used three levels of refinement, with the most refined part near the contraction region. We also used one uniform mesh
for
in order to check the convergence solutions in two meshes. In
,
m, and in
, we use small values of
m as well as larger values,
m.
In
Figure 10, we illustrate the centerline axial profile velocity
solutions for different values of the Deborah number
and
for the HiGFlow (green lines) and OpenFOAM (black lines) systems using mesh
. The experimental results of Quinzani et al. [
15] and numerical results of Mitsoulis [
14] and Tomé et al. [
3] (for
) are also shown for comparison purposes. For the case with
, we show two solutions using our methodology in mesh
(non-uniform mesh) and mesh
, where we can see good agreement between the solutions. For this reason, we adopted the
mesh to simulate the other cases with different values of number
. For the profile
, the HiGFlow system showed good agreement with the OpenFOAM solutions in the regions before and after the contraction. Near to contraction (see
Figure 10), we have a region of instability and the methodology behaves differently, but our results showed similar behavior to the instabilities presented in the works of Quinzani et al. (orange triangles) [
15], Mitsoulis [
14] (blue bullet) and Tomé et al. (violet square) [
3].
In
Figure 11, we show the numerical solution using HiGFlow (green lines) and OpenFOAM (black lines) systems for the tensor components
and
with the same flow parameter values reported in
Table 6 using
and
for the case with
. The methodologies presented in this work are different. OpenFOAM uses the finite volume method while HiGFlow approximates the equations using finite differences. Therefore, the solutions obtained will not be equal but should be comparable. Outside the contraction region, the OpenFOAM and HiGFlow solutions are very similar for all values of
. However, in the region close to the contraction, the solutions obtained using OpenFOAM showed a higher peak (
) but this is mostly seen in the cases with the highest values of
.
In
Figure 12a, we show the comparison between the first normal stress difference values
for two different cases of Deborah number,
and
. For better visualization, the other two values of
(see
Table 6) are illustrated in
Figure 12b, where we can see that the values of HiGFlow (green lines) have good agreement with experimental data (orange triangles) reported by Quinzani [
15], while the solution using OpenFOAM was similar to the solution presented by Mitsoulis [
14].
In
Figure 13, we compare the streamlines obtained using OpenFOAM (a) and HiGFlow (b) with a fixed value of
. We can see that there is vortex formation in both cases and that the solutions are relatively comparable.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}