
Individual Drive-Wheel Energy Management for Rear-Traction Electric Vehicles with In-Wheel Motors




Abstract
1. Introduction
2. State of the Art in EDS
3. Methodology
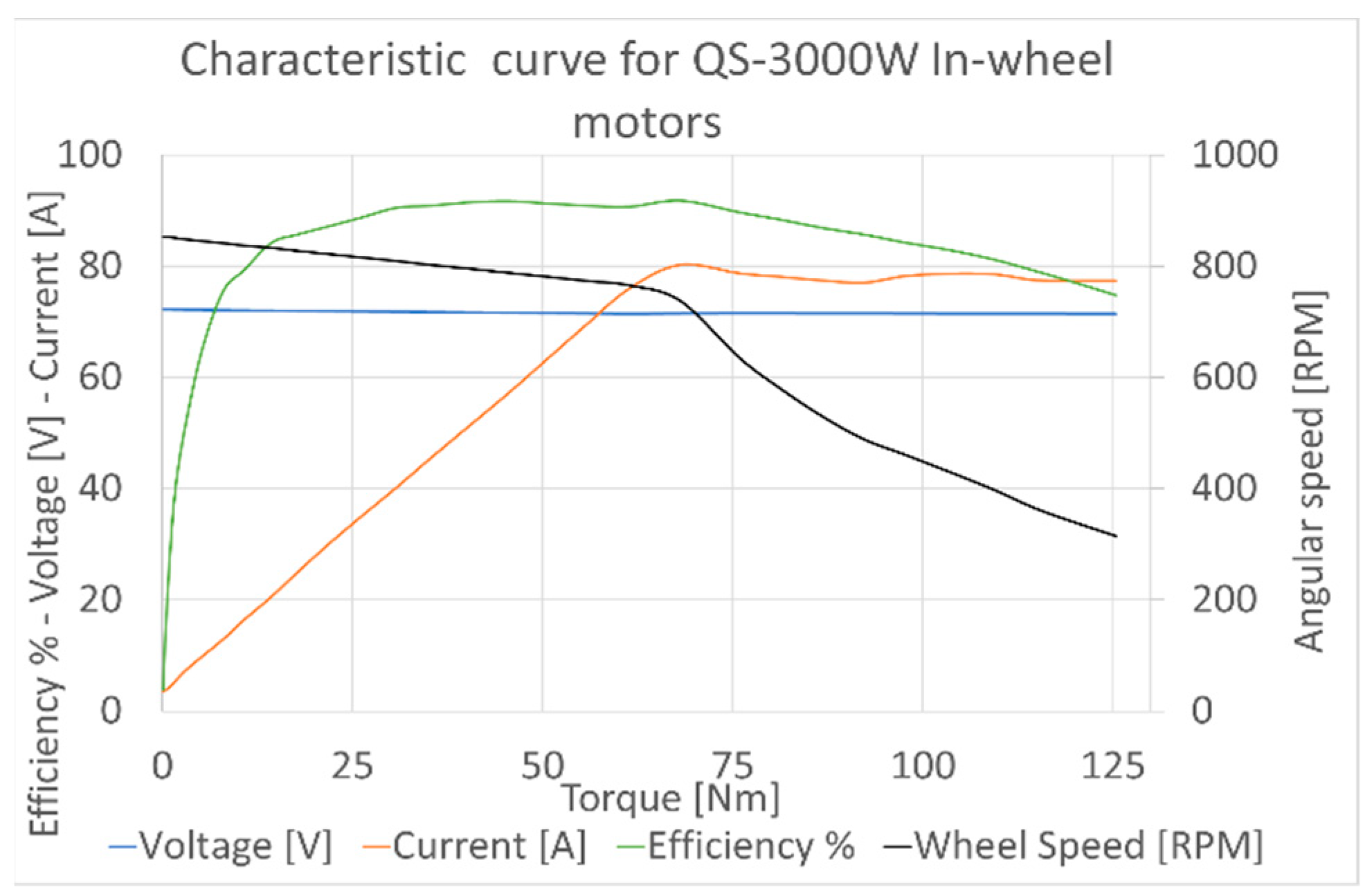
4. Experimental Test Vehicle
5. Vehicle Dynamics Modeling
5.1. Steady-State Handling Characteristics
5.2. Preliminary Dynamics Testing of VR1
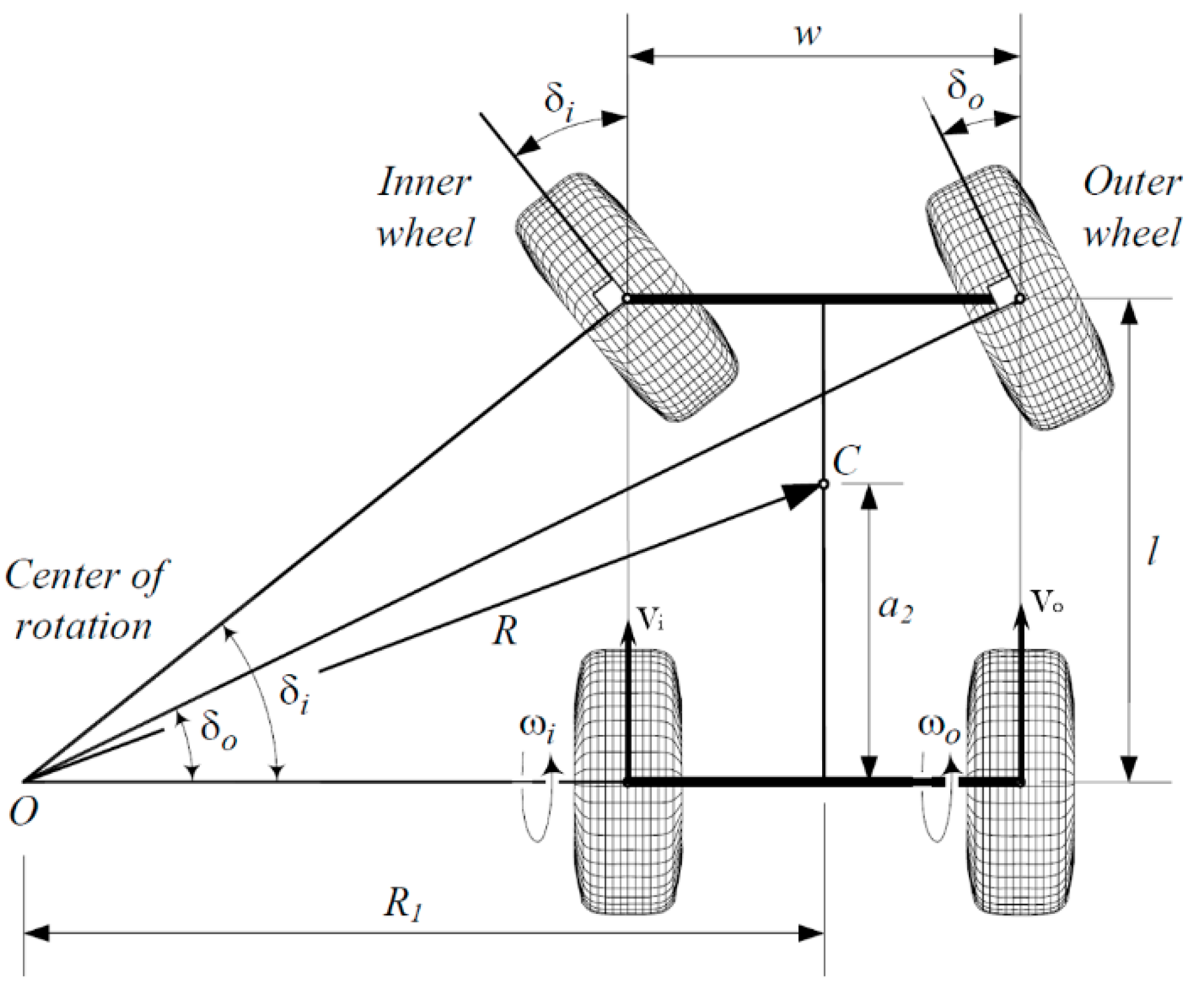
5.3. Kinematics
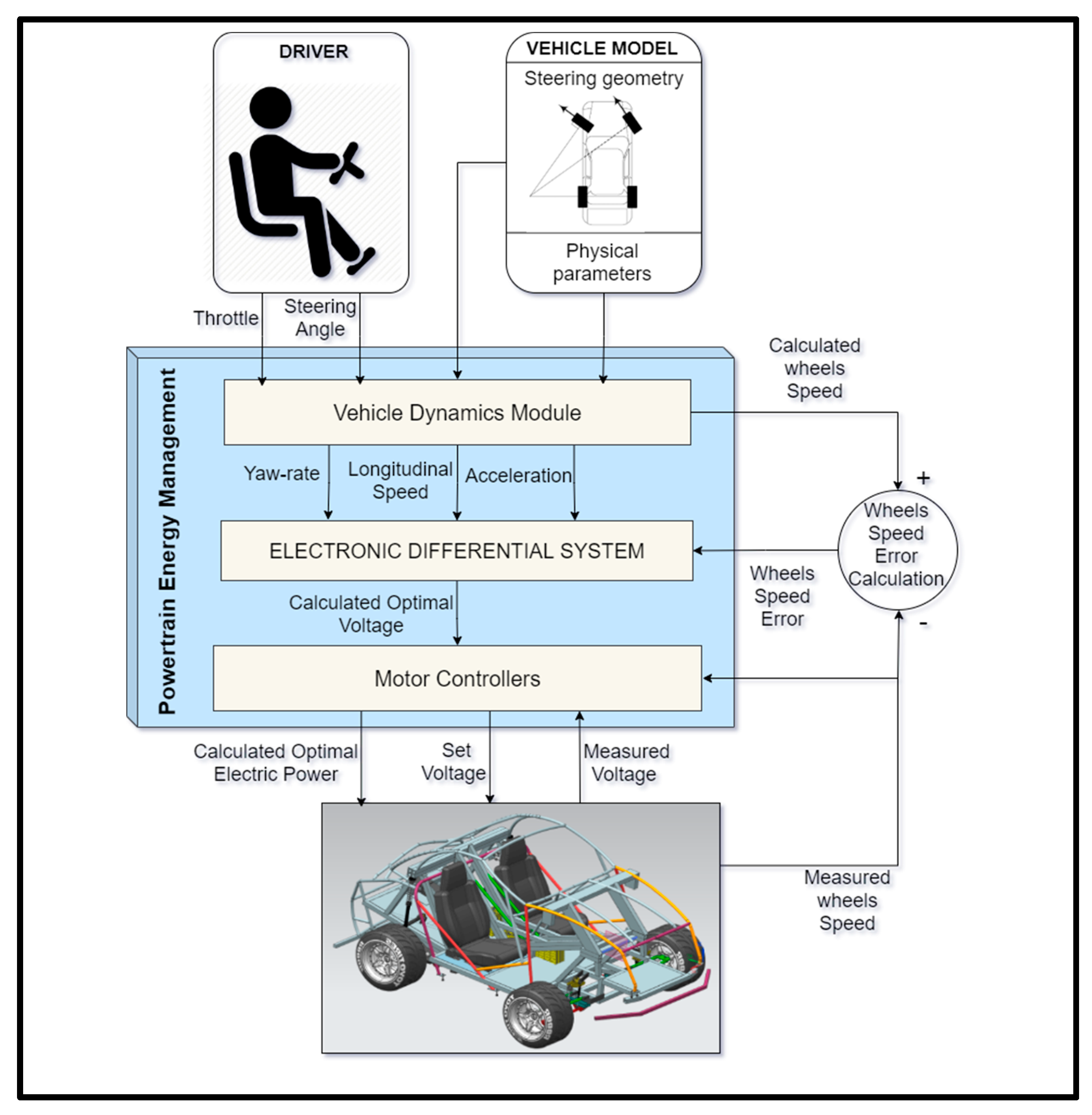
6. EDS Development
EDS Development Using MATLAB
7. Experimental Setup Specifications
7.1. EDS Speed Control and Acceleration Testing
7.2. Energy Management Testing
8. Results and Discussion
8.1. EDS Results on Speed Control during the Turning Maneuvers
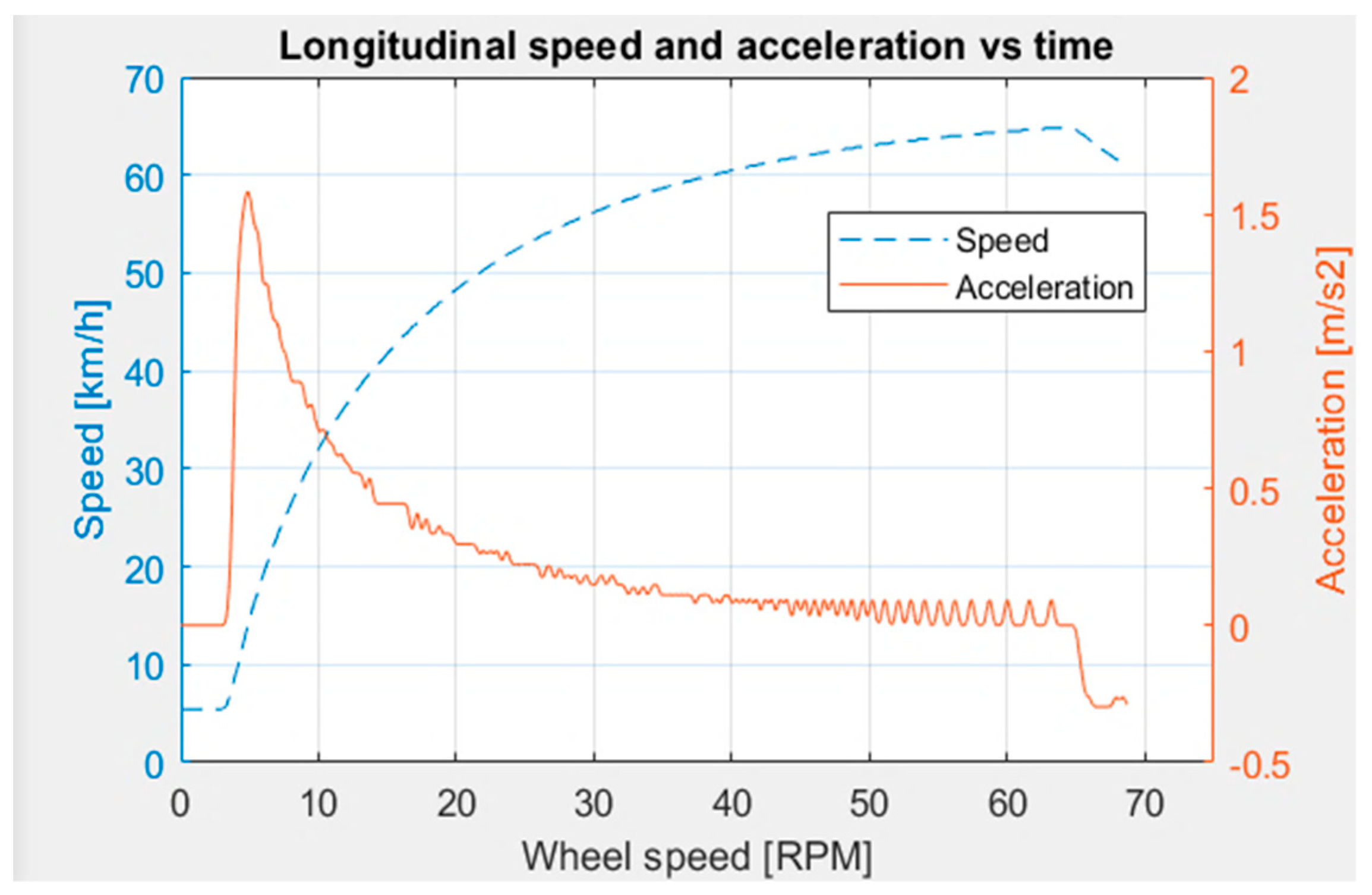
8.2. Acceleration Analysis
8.3. Energy Management Results
9. Conclusions
10. Future Work
- Evaluate advanced control strategies for the EDS, like machine learning models to predict optimal power strategies. The optimization parameters can be measurements provided by onboard sensors, while the model aims to minimize energy in real-time driving.
- Study the effects of integrating regenerative braking functionality into the EDS.
- Increase the number of onboard sensors and include IMUs to enhance vehicle dynamics together with energy management.
- Evaluate EDS capabilities in new terrains and driving scenarios, like uneven ground and steep slopes, to find new fields for potential improvement.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Definition |
|---|---|
| EV | Electric Vehicle |
| IWMEV | In-Wheel Motor Electric Vehicle |
| EDS | Electronic Differential System |
| Variable | Description |
|---|---|
| Cd | aerodynamic drag coefficient |
| CM | center of mass |
| Cα | cornering stiffness |
| Kus | understeer coefficient |
| l | length between the front and rear axle |
| R | turning radius |
| Rw | tire effective radius |
| V | longitudinal speed |
| Vi | speed of the inner rear wheel |
| Vo | speed of the outer rear wheel |
| w | wheelbase or track of the vehicle |
| YR | yaw rate of the car rad/s |
| ωi | the angular speed of the inside rear tire |
| ωo | the angular speed of the outside rear tire |
| δi | steer angle of the inside front tire |
| δo | steer angle of the outside front tire |
| δ | the equivalent turning angle of the front wheels |
References
- Altun, F.; Tekin, S.A.; Gurel, S.; Cernat, M. Design, and Optimization of Electric Cars. A Review of Technological Advances. In Proceedings of the 2019 8th International Conference on Renewable Energy Research and Applications (ICRERA); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 645–650. [Google Scholar] [CrossRef]
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Connected & autonomous vehicles—Environmental impacts—A review. Sci. Total Environ. 2020, 712, 135237. [Google Scholar] [CrossRef]
- Kim, H.; Pyeon, H.; Park, J.S.; Hwang, J.Y.; Lim, S. Autonomous Vehicle Fuel Economy Optimization with Deep Reinforcement Learning. Electronics 2020, 9, 1911. [Google Scholar] [CrossRef]
- Tian, Y.; Pei, K.; Jana, S.; Ray, B. Deep Test: Automated Testing of Deep-Neural-Network-Driven Autonomous Cars. In Proceedings of the 40th International Conference on Software Engineering: Software Engineering in Practice, Gothenburg, Sweden, 27 May–3 June 2018; Association for Computing Machinery (ACM): New York, NY, USA, 2018; pp. 303–314. [Google Scholar] [CrossRef]
- Sforza, A.; Lenzo, B.; Timpone, F. A state-of-the-art review on torque distribution strategies aimed at enhancing energy efficiency for fully electric vehicles with independently actuated drivetrains. Int. J. Mech. Control 2019, 20, 3–13. [Google Scholar]
- Bokolo, A., Jr. Applying Enterprise Architecture for Digital Transformation of Electro Mobility towards Sustainable Transportation. In Proceedings of the 2020 on Computers and People Research Conference, Nuremberg, Germany, 19–21 June 2020; Association for Computing Machinery (ACM): New York, NY, USA, 2020; pp. 38–46. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, Z.; Liu, L.; Liu, D.; Zhang, L. Design and validation of a novel hydraulic hybrid vehicle with wheel motors. Sci. Prog. 2019, 103, 1–25. [Google Scholar] [CrossRef] [PubMed]
- Ravi, A.; Palani, S. Research on Sensorless Control Strategies for Vehicle Stability Using Fuzzy Based EDC. Available online: https://www.semanticscholar.org/paper/Research-on-Sensorless-control-strategies-for-using-Ravi-Palani/5ac09d75bc4427b0eafd00c193b2f92339251f02 (accessed on 15 December 2020).
- Bai, Y.; Zheng, Y. Research on acceleration performance of fuel vehicles and electric vehicles based on Advisor. J. Phys. Conf. Ser. 2020, 1676, 012139. [Google Scholar] [CrossRef]
- Tan, D.; Ge, G.; Shi, L.; Yang, K. Research status of electronic differential control of electric vehicle driven by in-wheel motor. Int. J. Veh. Saf. 2020, 11, 289. [Google Scholar] [CrossRef]
- Milas, N.T.; Tatakis, E.C.; Mitronikas, E.D. Investigation of the operation of an electric city car equipped with electronic differential using CAN-enabled monitoring. In Proceedings of the 4th Panhellenic Conference on Electronics and Telecommunications (PACET 2017), Xanthi, Greece, 17–18 November 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Pisu, P.; Rizzoni, G. A Comparative Study of Supervisory Control Strategies for Hybrid Electric Vehicles. IEEE Trans. Control. Syst. Technol. 2007, 15, 506–518. [Google Scholar] [CrossRef]
- Wei, X.; Guzzella, L.; Utkin, V.I.; Rizzoni, G. Model-Based Fuel Optimal Control of Hybrid Electric Vehicle Using Variable Structure Control Systems. J. Dyn. Syst. Meas. Control. 2006, 129, 13–19. [Google Scholar] [CrossRef]
- Martinez, C.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy Management in Plug-in Hybrid Electric Vehicles: Recent Progress and a Connected Vehicles Perspective. IEEE Trans. Veh. Technol. 2017, 66, 4534–4549. [Google Scholar] [CrossRef]
- Wang, R.; Chen, Y.; Feng, D.; Huang, X.; Wang, J. Development and performance characterization of an electric ground vehicle with independently actuated in-wheel motors. J. Power Sources 2011, 196, 3962–3971. [Google Scholar] [CrossRef]
- Nogueira Da Cunha, F.P. Desenvolvimento de um Diferencial Eletrónico para Ves. Master’s Thesis, Faculty of Engineering, University of Porto, Porto, Portugal, 2014. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley: Hoboken, NJ, USA, 1993. [Google Scholar]
- Yıldırım, M.; Oksuztepe, E.; Tanyeri, B.; Kurum, H. Electronic differential system for an electric vehicle with in-wheel motor. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Online. 25–28 May 2020; IEEE: Piscataway, NJ, USA. [Google Scholar]
- Abe, M.; Manning, W. Vehicle Dynamics and Control. In Vehicle Handling Dynamics; Abe, M., Manning, W., Eds.; Butterworth-Heinemann: Oxford, UK, 2009; pp. 1–3. [Google Scholar]
- Julio-Rodríguez, J.d.C. Analysis and Implementation of Dynamics Equations in the Development of an Electronic Differential for an Electric Vehicle. Master’s Thesis, Tecnológico de Monterrey, Toluca, Mexico, 2019. [Google Scholar]
- Hua, Y.; Jiang, H.; Geng, G. Electronic differential control of 2WD electric vehicle considering steering stability. AIP Conf. Proc. 2017, 1820. [Google Scholar] [CrossRef]
- Daya, F.J.L.; Sanjeevikumar, P.; Blaabjerg, F.; Wheeler, P.W.; Ojo, J.O.; Ertas, A.H. Analysis of Wavelet Controller for Robustness in Electronic Differential of Electric Vehicles: An Investigation and Numerical Developments. Electr. Power Compon. Syst. 2016, 44, 1–11. [Google Scholar] [CrossRef]
- Zhou, H.; Jia, F.; Jing, H.; Liu, Z.; Guvenc, L. Coordinated Longitudinal and Lateral Motion Control for Four Wheel Independent Motor-Drive Electric Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 3782–3790. [Google Scholar] [CrossRef]
- Wang, P.; Liu, Z.; Liu, Q.; Chen, H. An MPC-based manoeuvre stability controller for full drive-by-wire vehicles. Control. Theory Technol. 2019, 17, 357–366. [Google Scholar] [CrossRef]
- Hu, X.; Wang, P.; Hu, Y.; Chen, H. A stability-guaranteed and energy-conserving torque distribution strategy for electric vehicles under extreme conditions. Appl. Energy 2020, 259, 114162. [Google Scholar] [CrossRef]
- Xu, W.; Chen, H.; Zhao, H.; Ren, B. Torque optimization control for electric vehicles with four in-wheel motors equipped with regenerative braking system. Mechatronics 2019, 57, 95–108. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, J.; Zhu, X.; Xu, Y. Lateral stability integrated with energy efficiency control for electric vehicles. Mech. Syst. Signal Process. 2019, 127, 1–15. [Google Scholar] [CrossRef]
- Zhao, B.; Xu, N.; Chen, H.; Guo, K.; Huang, Y. Stability control of electric vehicles with in-wheel motors by considering tire slip energy. Mech. Syst. Signal Process. 2019, 118, 340–359. [Google Scholar] [CrossRef]
- Birkhofer, H. The Future of Design Methodology; Springer: London, UK, 2011. [Google Scholar]
- Jazar, R.N. Vehicle Dynamics; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
















| Vehicle Information | |||
| Power train | Rear-drive, in-wheel motors | ||
| Weight | 400 kg (44% front axle–56% rear axle) | ||
| Dimensions | 2.96 m long × 2.14 m wide × 1.53 m high | ||
| Power source | 59 volts—16 Li-ion Cells Battery pack | ||
| Frontal area | 1.82 m2 | Cd: | 0.428 |
| Tire effective radius | 0.25 m | Rolling Resistance coefficient: | 0.027 |
| Tire cornering coefficient | 0.19 (1/deg) (normalized) | ||
| Wheelbase | 1.72 m | Inter-axle distance: | 1.89 m |
| * CM to rear wheels distance | 0.83 m | * CM heigh: | 0.3 m |
| Max torque | 350 N-m | ||
| Max acceleration | 1.54 m/s2 | Max speed: | 64 km/h |
| Longitudinal Acceleration (m/s2) | ||
|---|---|---|
| Deactivated EDS | Activated EDS | |
| Max | 0.5491 | 0.5374 |
| Min | −1.5168 | −1.2662 |
| mean + | 0.1925 | 0.1495 |
| mean − | −0.5198 | −0.1420 |
| Right Turn with EDS Activated | |||
| Left Motor | Right Motor | Total | |
| Energy (Wh) | 2.12 | 0.89 | 3.01 |
| Average Power (W) | 621.69 | 262.99 | 884.68 |
| Right Turn with EDS Deactivated | |||
| Left Motor | Right Motor | Total | |
| Energy (Wh) | 1.83 | 2.00 | 3.83 |
| Average Power (W) | 657.24 | 721.41 | 1378.65 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Julio-Rodríguez, J.d.C.; Santana-Díaz., A.; Ramirez-Mendoza, R.A. Individual Drive-Wheel Energy Management for Rear-Traction Electric Vehicles with In-Wheel Motors. Appl. Sci. 2021, 11, 4679. https://doi.org/10.3390/app11104679
Julio-Rodríguez JdC, Santana-Díaz. A, Ramirez-Mendoza RA. Individual Drive-Wheel Energy Management for Rear-Traction Electric Vehicles with In-Wheel Motors. Applied Sciences. 2021; 11(10):4679. https://doi.org/10.3390/app11104679
Chicago/Turabian StyleJulio-Rodríguez, Jose del C., Alfredo Santana-Díaz., and Ricardo A. Ramirez-Mendoza. 2021. "Individual Drive-Wheel Energy Management for Rear-Traction Electric Vehicles with In-Wheel Motors" Applied Sciences 11, no. 10: 4679. https://doi.org/10.3390/app11104679
APA StyleJulio-Rodríguez, J. d. C., Santana-Díaz., A., & Ramirez-Mendoza, R. A. (2021). Individual Drive-Wheel Energy Management for Rear-Traction Electric Vehicles with In-Wheel Motors. Applied Sciences, 11(10), 4679. https://doi.org/10.3390/app11104679