
Application of Collision Warning Algorithm Alarm in Fishing Vessel’s Waterway


 ,
,  ,
,
Abstract
1. Introduction
2. Collision Warning Algorithm for Small Fishing Vessels
2.1. PARK Model
| : | Type factor | : | Tonnage factor | : | Length factor |
| : | Width factor | : | Career factor | : | License factor |
| : | Position factor | : | Target ship length overall (LOA) | ||
| : | Crossing factor | : | Side factor | : | In/out harbor factor |
| : | Speed factor | : | Speed difference | : | Distance |
2.2. Overview of the Collision Warning Algorithm
3. Application of Collision Warning Algorithm to Real Ship Test
3.1. Overview of the Real Ship Test
3.2. Results of the Real Ship Test
- 1.
- Scenario 1
- 2.
- Scenario 2
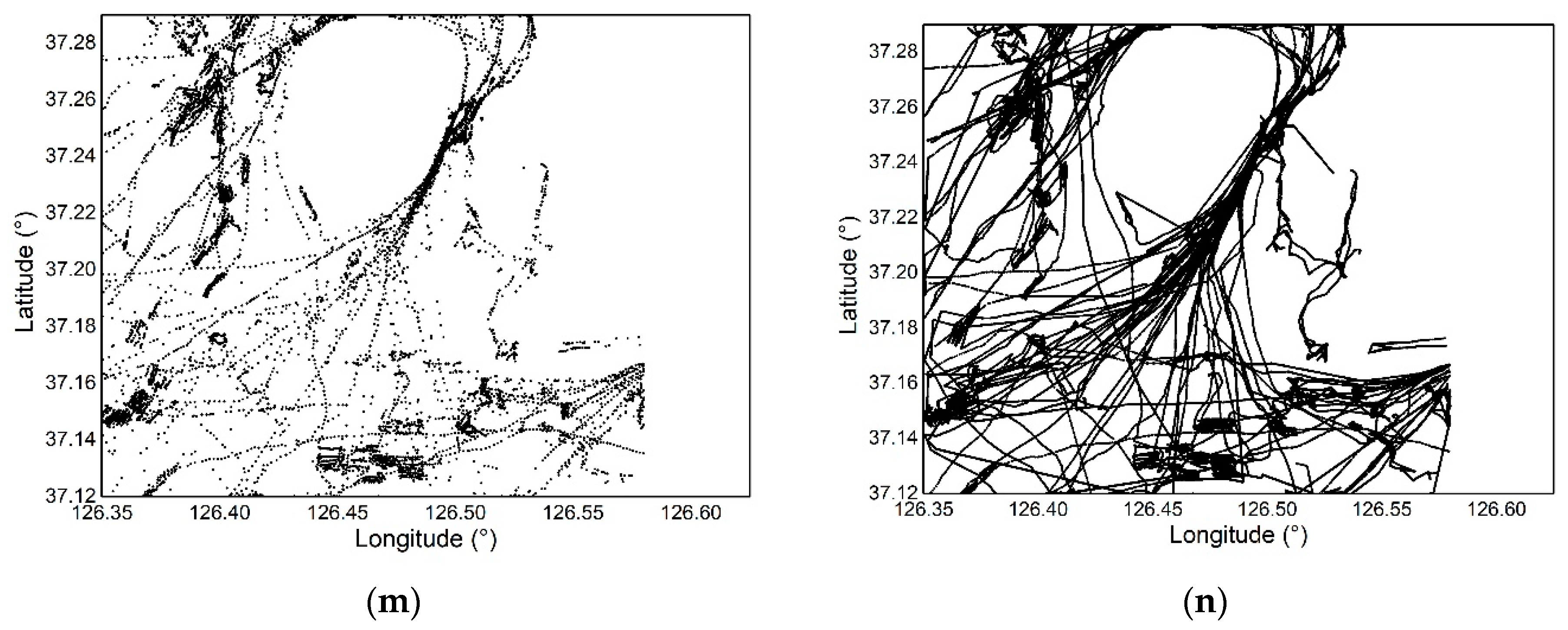
4. Application in Fishing Vessel’s Waterway Based on Vpass Data
| : Position at time t | |
| : Position after time | |
| : Position after interval to be interpolated | |
| : Distance between and | |
| : Distance between and | |
| : Distance between and |
4.1. Case Study of the Collision Warning Algorithm Application Based on Vpass Data
- 1.
- Case 1
- 2.
- Case 2
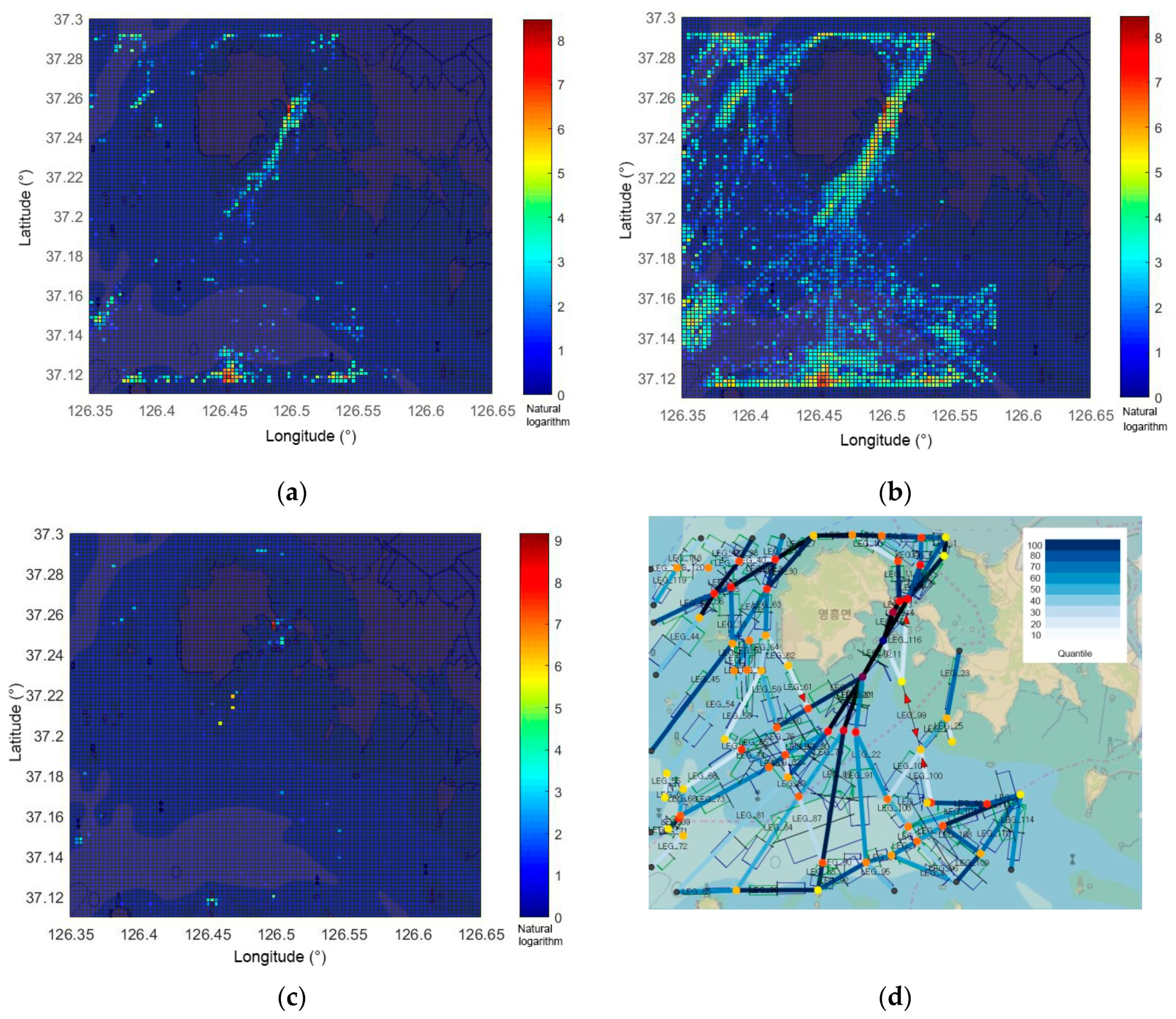
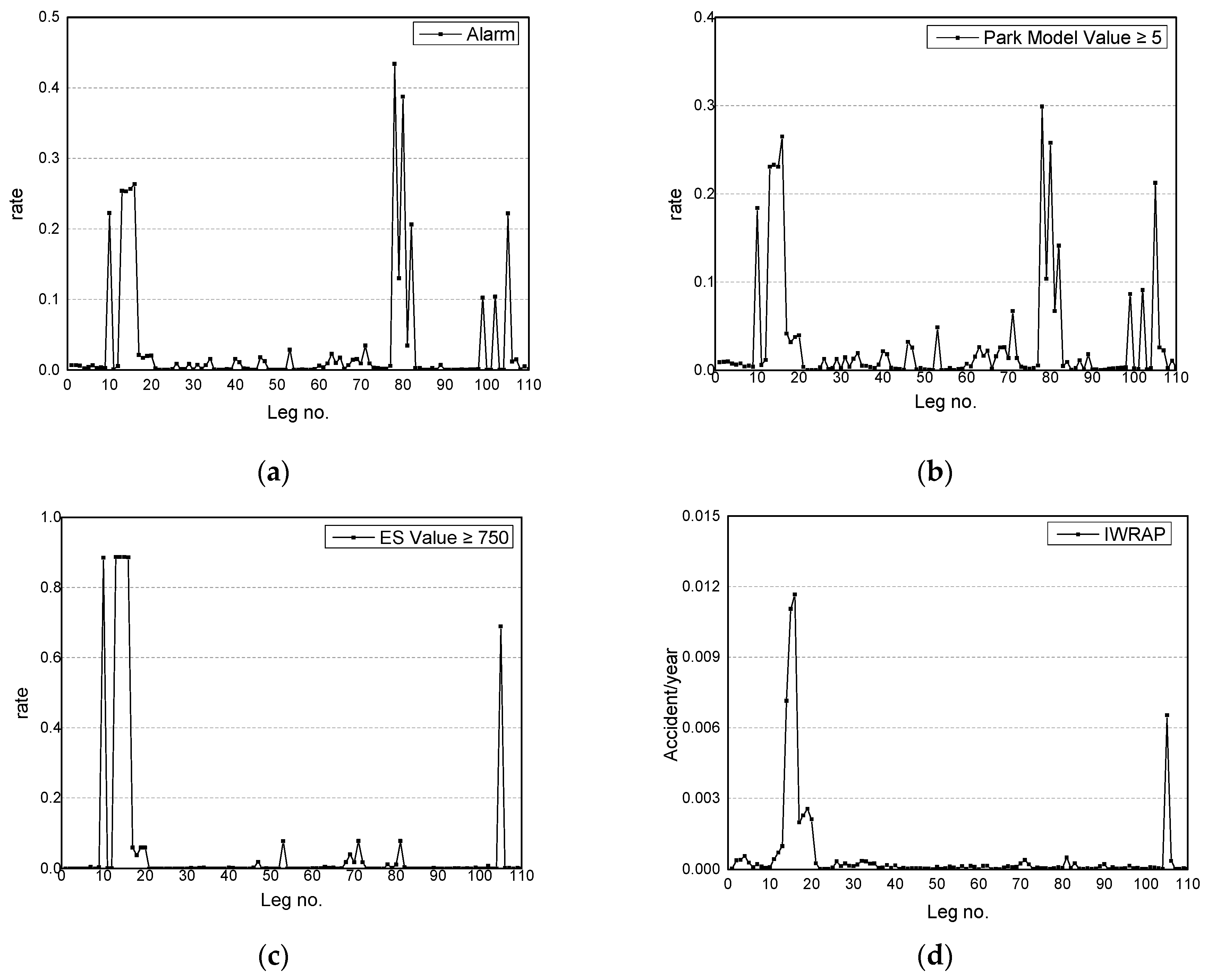
4.2. Comparison of the Waters That Generated Alarms and the Risk Waters Based on the Maritime Risk Assessment Tools
4.2.1. Overview of the Maritime Risk Assessment Tools
- 1.
- ES Model
| : | Risk concerning the relative distance between the ships in relation to collision; |
| : | Relative distance between two ships; |
| : | Relative speed of the two ships; |
| : | Average length of the two ships; |
| If crossed from starboard, . | |
| If crossed from portside, . | |
| If meeting from the stem, . | |
| If the own ship is overpassed from the stern, . | |
- 2.
- IWRAP MkII
- Geometric number of collision or grounding candidates;
- Causation factor.
| : Length of the segment; | |
| : The number of passages per unit time for each ship type and size; | |
| : Speed of the ships; | |
| : The probability that two ships will collide in a head-on situation; |
| : Apparent collision diameter; | |
| : Encounter angle of two ships. |
4.2.2. Comparison between Waters with Alarms and Risky Waters
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ton Factor | Length Factor | Width Factor | |||
|---|---|---|---|---|---|
| not more than 500 ton | 0.634656 | not more than 70 m | −1.065590 | not more than 10 m | 0.500588 |
| 500–1,000 ton | −0.229980 | 70–90 m | −2.487910 | 10–15 m | −0.025510 |
| 1,000–3,000 ton | 2.180813 | 90–108 m | −0.533920 | 15–20 m | 0.210588 |
| 3,000–5,000 ton | −0.093240 | 108–123 m | −0.142000 | 20–25 m | −0.289200 |
| 5,000–7,000 ton | −0.345600 | 123–140 m | −0.091250 | 25–30 m | 0.360838 |
| 7,000–10,000 ton | −0.765630 | 140–160 m | 0.754828 | 30–35 m | 0.099504 |
| 10,000–15,000 ton | −0.126220 | 160–185 m | −0.499360 | 35–40 m | 0.343936 |
| 15,000–20,000 ton | −0.131530 | 185–223 m | −0.927940 | 40–45 m | 0.046159 |
| 20,000–25,000 ton | 0.217815 | 223 −243 m | 0.562870 | more than 45 m | −0.289570 |
| 25,000–30,000 ton | −0.145350 | 243–259 m | 0.046498 | ||
| 30,000–50,000 ton | −0.656140 | 259–277 m | 0.709714 | Type Factor | |
| 50,000–60,000 ton | 0.063690 | more than 277 m | −0.249550 | fishing vessel | −0.072820 |
| 60,000–75,000 ton | −0.381260 | container ship | −0.335320 | ||
| 75,000–100,000 ton | 0.313252 | License Factor | pure car carrier | −0.031670 | |
| more than 100,000 ton | 0.000000 | merchant 1 class | 0.177682 | tanker | −0.082580 |
| merchant 2 class | 0.109177 | LNG/LPG carrier | 0.315854 | ||
| Career Factor | merchant 3 class | 0.245199 | passenger ship | −1.597980 | |
| not more than 1 year | −0.104830 | towing vessel | −0.116540 | ||
| 1–3 years | −0.332360 | Position Factor | other cargo ship | 0.000000 | |
| 3–5 years | −0.064230 | captain | 0.184283 | ||
| more than 5 years | −0.136730 | chief officer | 0.176755 | Speed Factor | |
| second officer | 0.296052 | OS speed # TS speed | 0.120578 | ||
| Crossing Factor | third officer | −0.075180 | OS speed < TS speed | −0.056520 | |
| CR45 | 0.468465 | OS speed > TS speed | 0.000000 | ||
| CR90 | 0.500211 | Side Factor | |||
| CR135 | 0.660194 | TS on Stbd side | −0.056600 | In/Out Harbor Factor | |
| HO | 0.626923 | TS on Port side | 0.000000 | OS inner harbor | 0.062305 |
| OS outer harbor | 0.000000 |
Appendix B



References
- Jung, C.H. A Study on the Improvement of Safety by Accidents Analysis of Fishing Vessels. J. Fish. Mar. Sci. Educ. 2018, 30, 179–186. [Google Scholar]
- Subash, T.D.; Pradeep, A.S.; Joseph, A.R.; Jacob, A.; Jayaraj, P.S. Intelligent Collision Avoidance system for fishing boat. Mater. Today Proc. 2020, 24, 2457–2463. [Google Scholar] [CrossRef]
- Håvold, J.I. Safety culture aboard fishing vessels. Saf. Sci. 2010, 48, 1054–1061. [Google Scholar] [CrossRef]
- Kim, S.H.; Kim, H.S.; Lee, Y.W. The causes and counterplan for marine casualties of fishing boats according to the fishing types. J. Korean Soc. Fish Ocean Technol. 2020, 56, 246–257. [Google Scholar] [CrossRef]
- Korean Maritime Safety Tribunal. Statistics of Marine Accidents. 2019. Available online: https://www.kmst.go.kr/kcom/cnt/selectContentsPage.do?cntId=21010000 (accessed on 4 December 2020).
- IMO. The International Convention on Standards of Training, Certification and Watchkeeping for Fishing Vessel Personnel [Adopted in July 1995]; International Maritime Organization: London, UK, 1995. [Google Scholar]
- IMO. Cape Town Agreement of 2012 [Adopted in October 2012]; International Maritime Organization: London, UK, 2012. [Google Scholar]
- ILO. The ILO Work in Fishing Convention No. 118 [Adopted in May 2007]; International Labour Organization: Geneva, Switzerland, 2007. [Google Scholar]
- FAO. Joining Forces to Shape the Fishery Sector of Tomorrow; Food and Agriculture Organization of the United Nations: Rome, Italy, 2020. [Google Scholar]
- IMO. Convention on the International Regulations for Preventing Collisions at Sea, [with Amendments Adopted from December 2009]; International Maritime Organization: London, UK, 1972. [Google Scholar]
- Wang, J.; Pillay, A.; Kwon, Y.S.; Wall, A.D.; Loughran, C.G. An analysis of fishing vessel accidents. Accid. Anal. Prev. 2005, 37, 1019–1024. [Google Scholar] [CrossRef] [PubMed]
- Uğurlu, F.; Yıldız, S.; Boran, M.; Uğurlu, Ö.; Wang, J. Analysis of fishing vessel accidents with Bayesian network and Chi-square methods. Ocean Eng. 2020, 198, 106956. [Google Scholar] [CrossRef]
- An, K.; Kim, I.C.; Kim, C.S. A Study on Navigational Support Services for Improving Navigational Safety of Non-SOLAS Ships. J. Korean Soc. Mar. Environ. Saf. 2016, 22, 305–310. [Google Scholar] [CrossRef]
- Kang, W.S.; Kim, Y.D.; Lee, M.K.; Park, Y.S. The Development of a Collision Warning System for Small-Sized Vessels Using WAVE Communication Technology. J. Korean Soc. Mar. Environ. Saf. 2019, 25, 151–158. [Google Scholar] [CrossRef]
- Lee, E.B. A basic study on the development of ultrasonic alert system for preventing collision accident of small ships. J. Res. Inst. Mar. Ind. 2004, 15, 1–7. [Google Scholar]
- Kao, S.L.; Lee, M.A. Method for Small-Scale Fishing Boat Equipped with Radar Receiver to Avoid Ship Collision and the Radar Receiver Therefor. U.S. Patent 7,710,309, 4 May 2010. [Google Scholar]
- Kao, S.L.; Chang, K.Y. Study on fuzzy GIS for navigation safety of fishing boats. J. Mar. Eng. Technol. 2017, 16, 84–93. [Google Scholar] [CrossRef]
- Seo, A.; Hida, T.; Nishiyama, M.; Nagao, K. Comparison and evaluation on user interface of small ship navigation support system. Proc. Jpn. Inst. Navig. 2018, 6, 1–4. [Google Scholar]
- Hu, Y.; Park, G.K.; Pham, T.Q.M. A solving algorithm of navigational collision risk through data analysis of fishing vessel activities. J. Data. Inf. Manag. 2020, 2, 25–37. [Google Scholar] [CrossRef]
- Park, D.J.; Yim, J.B.; Lee, C.K. Modeling navigator errors in collisions using hidden markov models. J. Mar. Sci. Technol. 2020, 28, 631–639. [Google Scholar]
- Lee, C.K.; Kim, S.H.; Lee, J.G.; Lee, S.M.; Kim, M.S. A study on the characteristics of manoeuvrability of fishing vessel. J. Korean Soc. Fish. Ocean Technol. 2018, 54, 239–245. [Google Scholar] [CrossRef]
- Lim, S.W. A study about legal effect of navigation’s mistake on fishing vessels collision accident -Focused on the Korea maritime safety tribunal judgement with lights and shapes. J. Korea Mar. Law Assoc. 2020, 42, 81–112. [Google Scholar]
- Lee, M.K.; Park, Y.S. Collision prevention algorithm for fishing vessels using mmWAVE communication. J. Mar. Sci. Eng. 2020, 8, 115. [Google Scholar] [CrossRef]
- Lee, J.S. A basic study on the collision risk of VTS considering the operational characteristics of small vessels. In Proceedings of the Korean Institute of Navigation and Port Research Conference, Gyoungju, Korea, 8 November 2018; pp. 273–274. [Google Scholar]
- Cvach, M. Monitor alarm fatigue: An integrative review. Biomed. Instrum. Technol. 2012, 46, 268–277. [Google Scholar] [CrossRef] [PubMed]
- Lim, S.W. Application Scope and Standard of ‘Fishing Vessels Working in Fishery’—Focused on the Correct Interpretation Direction. Justice 2020, 179, 161–181. [Google Scholar] [CrossRef]
- Park, Y.; Park, J.; Shin, D.; Lee, M.; Park, S. Application of potential assessment of risk (PARK) model in Korea waterways. J. Int. Marit. Saf. Environ. Aff. Shipp. 2017, 1, 1–10. [Google Scholar] [CrossRef]
- Weather Information of Korea Meteorological Administration. Available online: http://www.weather.go.kr/mini/marine/marine_integrate.jsp (accessed on 17 December 2020).
- Ministry of Oceans and Fisheries. Statistical Yearbook of Oceans and Fisheries; Ministry of Oceans and Fisheries: Sejong City, Korea, 2020; p. 466. [Google Scholar]
- Korea Ministry of Government Legislation. Notification on Installation Standards and Operation of V.-Pass Devices, etc. Available online: https://www.law.go.kr/ (accessed on 12 January 2021).
- Korea Ministry of Government Legislation. Fishing Vessels Act Article 5-2 Ship Location Transmitters Equipment for Fishing Vessels. Available online: https://www.law.go.kr/ (accessed on 12 January 2021).
- Korea Ministry of Government Legislation. Fishing Vessel Facility Standards Article 191 Ship Location Transmitters Equipment for Fishing Vessels. Available online: https://www.law.go.kr/ (accessed on 12 January 2021).
- Inoue, K. Evaluation method of ship-handling difficulty for navigation in restricted and congested waterways. J. Navig. 2000, 53, 167–180. [Google Scholar] [CrossRef]
- IALA. IALA Waterway Risk Assessment Programme (IWRAP) Theory; IALA: Saint-Germain-en-Laye, France, 2014; pp. 2–16. [Google Scholar]
- Korea Hydrographic and Oceanographic Agency. Oceanmap. Available online: http://www.khoa.go.kr/oceanmap/main.do (accessed on 17 February 2021).
- Korea Hydrographic and Oceanographic Agency. Nautical Chart Approaches to Asan Man No. 3437; Korea Hydrographic and Oceanographic Agency: Busan, Korea, 2019. [Google Scholar]












| Internal elements | Type factor, Length factor, Width factor, Tonnage factor, Career factor, License factor, and Position factor |
| External elements | Crossing factor, Side factor, In/Out harbor factor, and Speed factor |
| Ship Type | Length (m) | Width (m) | Depth (m) | Gross Tonnage (G/T) | |
|---|---|---|---|---|---|
| A | Fishing | 10.95 | 3.31 | 0.83 | 4.97 |
| B | Fishing | 10.00 | 3.27 | 0.82 | 6.63 |
| C | Fishing | 10.06 | 4.12 | 0.99 | 9.77 |
| Time (s) | Own Ship | Target Ship | Distance (m) | DCPA (m) | TCPA (s) | Risk | Alarm |
|---|---|---|---|---|---|---|---|
| 99.3 | Ship B | Ship C | 1689.56 | 21.86 | 148.87 | 7.0 | first Main |
| 99.3 | Ship C | Ship B | 1689.56 | 21.86 | 148.87 | 7.0 | first Main |
| 105.1 | Ship A | Ship C | 1596.54 | 31.17 | 140.82 | 7.0 | first Main |
| 161.1 | Ship B | Ship C | 924.29 | 10.50 | 83.54 | 7.0 | second Main |
| 161.1 | Ship C | Ship B | 924.29 | 10.50 | 83.54 | 7.0 | second Main |
| 211.5 | Ship A | Ship B | 89.41 | 27.55 | 146.34 | 7.0 | second Main |
| Time (s) | Own Ship | Target Ship | Distance (m) | DCPA (m) | TCPA (s) | Risk | Alarm |
|---|---|---|---|---|---|---|---|
| 176.4 | Ship B | Ship C | 1387.23 | 6.70 | 149.93 | 7.0 | First Main |
| 176.4 | Ship C | Ship B | 1387.23 | 6.70 | 149.93 | 7.0 | First Main |
| 191.6 | Ship A | Ship B | 1049.63 | 12.43 | 149.77 | 7.0 | First Main |
| 210.9 | Ship A | Ship B | 913.81 | 29.53 | 139.56 | 7.0 | Second Main |
| 210.9 | Ship B | Ship A | 913.81 | 29.53 | 139.56 | 7.0 | Second Main |
| 224.5 | Ship C | Ship B | 925.76 | 1.08 | 100.51 | 7.0 | Second Main |
| Time (s) | Target Ship | Distance (m) | DCPA (m) | TCPA (s) | Risk | Alarm |
|---|---|---|---|---|---|---|
| 9.7 | Ship C | 1067.53 | 29.59 | 149.97 | 7.0 | first Main |
| 41.3 | Ship C | 815.54 | 34.83 | 83.39 | 7.0 | second Main |
| 113.2 | Ship C | 76.88 | 76.88 | 0.04 | 6.0 | second Main |
| 247.8 | Ship B | 753.38 | 30.41 | 70.35 | 7.0 | second Main |
| 317.2 | Ship B | 8.20 | 8.12 | 0.11 | 7.0 | second Main |
| Time (s) | Target Ship | Distance (m) | DCPA (m) | TCPA (s) | Risk | Alarm |
|---|---|---|---|---|---|---|
| 171.6 | Ship D | 935.74 | 27.27 | 101.01 | 7.0 | first Main |
| 172.9 | Ship D | 923.76 | 27.09 | 99.72 | 7.0 | second Main |
| 266.8 | Ship D | 135.12 | 135.10 | 0.58 | 5.0 | second Main |
| 318.1 | Ship D | 58.76 | 27.63 | 59.93 | 7.0 | second Main |
| 341.2 | Ship A | 85.38 | 26.37 | 38.55 | 7.0 | second Main |
| 437.2 | Ship A | 26.25 | 17.65 | 566.25 | 5.0 | second Main |
| 452.2 | Ship A | 17.35 | 12.95 | 149.64 | 7.0 | second Main |
| 471.4 | Ship A | 5.56 | 5.40 | 7.04 | 7.0 | second Main |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, M.-K.; Park, Y.-S.; Park, S.; Lee, E.; Park, M.; Kim, N.-E. Application of Collision Warning Algorithm Alarm in Fishing Vessel’s Waterway. Appl. Sci. 2021, 11, 4479. https://doi.org/10.3390/app11104479
Lee M-K, Park Y-S, Park S, Lee E, Park M, Kim N-E. Application of Collision Warning Algorithm Alarm in Fishing Vessel’s Waterway. Applied Sciences. 2021; 11(10):4479. https://doi.org/10.3390/app11104479
Chicago/Turabian StyleLee, Myoung-Ki, Young-Soo Park, Sangwon Park, Eunkyu Lee, Minjeong Park, and Ni-Eun Kim. 2021. "Application of Collision Warning Algorithm Alarm in Fishing Vessel’s Waterway" Applied Sciences 11, no. 10: 4479. https://doi.org/10.3390/app11104479
APA StyleLee, M.-K., Park, Y.-S., Park, S., Lee, E., Park, M., & Kim, N.-E. (2021). Application of Collision Warning Algorithm Alarm in Fishing Vessel’s Waterway. Applied Sciences, 11(10), 4479. https://doi.org/10.3390/app11104479