
Convergency and Stability of Explicit and Implicit Schemes in the Simulation of the Heat Equation


Abstract
Featured Application
Abstract
1. Introduction
2. The Heat Equation
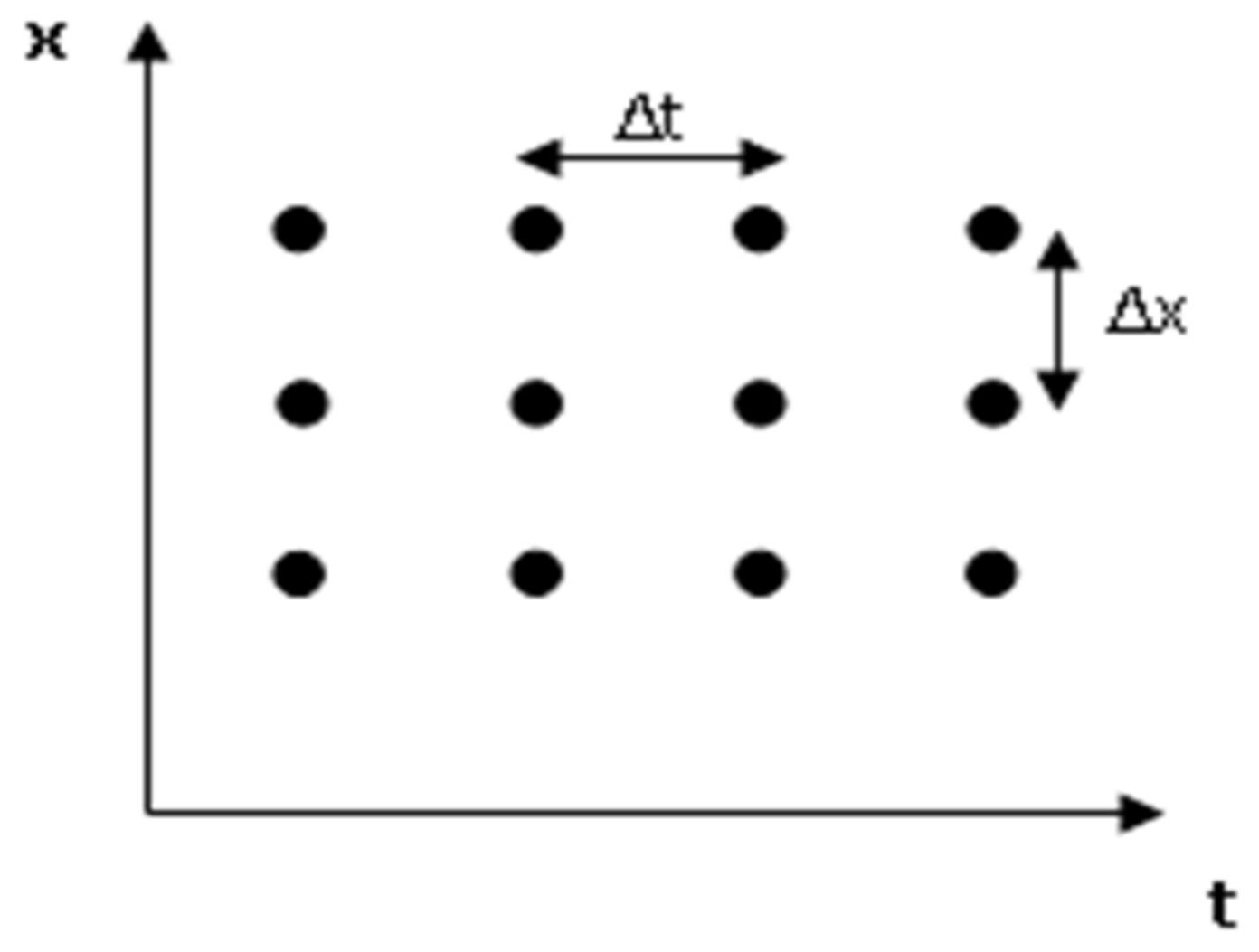
3. Finite Difference Approximations
4. Explicit Methods: Centered, Forward and Backward in Time Differences
4.1. Direct Finite Difference of First Order
4.1.1. First-Order Backward Difference
4.1.2. First-Order Centered Difference
4.1.3. Second-Order Centered Difference
4.1.4. Difference Centered Forward in Time
4.1.5. Implicit Method: Crank-Nicolson (CN)
4.1.6. The Algorithm
4.1.7. Analytic Solution
5. Results
5.1. Numerical Implementation
5.2. Estimates of Truncation Error (TE)
5.3. Solutions Validation
5.4. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ames, W. Numerical Methods for Partial Differential Equations; Academic Press, Inc.: Boston, MA, USA, 1992. [Google Scholar]
- Olsen-Kettle, L. Numerical Solution of Partial Differential Equations and Code; Swinburne University of Technology: Melbourne, Australia, 2011; pp. 14–28. [Google Scholar]
- Adak, M. Comparison of Explicit and Implicit Finite Difference Schemes on Diffusion Equation. In Mathematical Modeling and Computational Tools ICACM 2018. Springer Proceedings in Mathematics & Statistics; Bhattacharyya, S., Kumar, J., Ghoshal, K., Eds.; Springer: Singapore, 2018; Volume 320. [Google Scholar]
- Cooper, J. Introductin to Partial Differential Equations with Matlab; Birkhuser: Boston, MA, USA, 1998. [Google Scholar]
- Sequeira-Chavarría, F.; Ramírez-Bogantes, M. Computational Aspects of the Finite Difference Method for the Time-Dependent Heat Equation. Uniciencia 2019, 33, 83–100. [Google Scholar] [CrossRef]
- Morton, K.W.; Mayers, D.F. Numerical Solution of Partial Differential Equations: An Introduction; Cambridge University Press: Cambridge, UK, 1994. [Google Scholar]
- Chapra, S.C.; Canale, R.P. Métodos Numéricos Para Ingenieros; McGraw-Hill/Interamericana Editores: New York, NY, USA, 2007. [Google Scholar]
- Millán, Z.; de la Torre, L.; Oliva, L.; Berenguer, M. Simulación numérica: Ecuación de difusión. Rev. Iberoam. Ing. Mecánica 2011, 15, 29–38. [Google Scholar]
- Fletcher, C. Computational Techniquess for Fluid Dynamics; Springer: Berlin, Germany, 1998. [Google Scholar]
- Khan, M.N.; Ahmad, I.; Akgül, A.; Ahmad, H.; Thounthong, P. Numerical solution of time-fractional coupled Korteweg–de Vries and Klein–Gordon equations by local meshless method. Pramana J. Phys. 2021, 95, 6. [Google Scholar] [CrossRef]
- Liu, C.; Liu, X.; Yang, Z.; Yang, H.; Huang, J. New stability results of generalized impulsive functional differential equations. Sci. China Inf. Sci. 2021, 65, 129201(2022). [Google Scholar] [CrossRef]
- Recktenwald, G. Finite-Difference Approximations to the Heat Equation. Mech. Eng. 2011, 10, 4–20. [Google Scholar]
- Golub, G.; Ortega, J. Scientific Computing: An Introduction with Parallel Computing; Academic Press, Inc.: Boston, UK, 1993. [Google Scholar]
- Camacho, A.; Guardian, B.; Jacobo, V.; Ortiz, A. El método alternativo de Schwarz y la computación paralela. In Proceedings of the MEMORIAS XXIV Congreso Internacional Anual de la SOMIM, Campeche, Mexico, 19–21 September 2018; pp. 77–82. [Google Scholar]
- Huang, J.; Nualart, D.; Viitasaari, L. A central limit theorem for the stochastic heat equation. Stoch. Process. Appl. 2020, 130, 7170–7184. [Google Scholar] [CrossRef]
- Hoffman, J. Numerical Methods for Engineers and Scientists; McGraw-Hill: New York, NY, USA, 1992. [Google Scholar]
- O’Neil, P. Matemáticas Avanzadas Para Ingeniería, 7th ed.; Cengage Learning: Boston, MA, USA, 2015. [Google Scholar]
- Ibarra, M.C. La ecuación de calor de Fourier: Resolución mediante métodos de análisis en variable real y en variable compleja. In UTN Facultad Regional Resistencia: II Jornadas de Investigación en Ingeniería del NEA y Países Limítrofes; Universidad Técnica Nacional: Misiones, Argentina, 2012. [Google Scholar]
- Mamani Condori, F.; Gonzales Medina, R. Aplicación de Las Series de Fourier en la Solución de Problemas Con Valor Inicial en la Frontera. Veritas 2019, 13, 225–230. [Google Scholar]
- Cranmer, K.; Brehmer, J.; Louppe, G. The frontier of simulation-based inference. Proc. Natl. Acad. Sci. USA 2020, 117, 30055–30062. [Google Scholar] [CrossRef]
- Cannon, J. The One-Dimensional Heat Equation, Encyclopedia of Mathematics and Its Applications; Cambridge University Press: Cambridge, UK, 1984. [Google Scholar]
- Martín-Vaquero, J.; Vigo-Aguiar, J. On the numerical solution of the heat conduction equations subject to nonlocal conditions. Appl. Numer. Math. 2009, 59, 2507–2514. [Google Scholar] [CrossRef]
- Li, Y. Central limit theorem for a fractional stochastic heat equation with spatially correlated noise. Adv. Differ. Equ. 2020, 1–9. [Google Scholar] [CrossRef]
- Madera, S.; Ortega-Quitana, F.; Lopez, A.; Perez, O. Determinación del Coeficiente Convectivo de Transferencia de Calor del Proceso de Escaldado de Zapallo (Cucurbita maxima). Inf. Tecnol. 2017, 28, 59–66. [Google Scholar] [CrossRef][Green Version]
- Meza Castro, I.F.; Herrera Acuña, A.E.; Obregón Quiñones, L.G. Determinación Experimental de Nuevas Correlaciones Estadísticas para el Cálculo del Coeficiente de Transferencia de Calor por Convección para Placa Plana, Cilindros y Bancos de Tubos. INGE CUC 2017, 13, 9–17. [Google Scholar] [CrossRef]
- Isaacson, E.; Keller, H.B. Analysis of Numerical Methods; Dover Books on Mathematics: New York, NY, USA, 1994. [Google Scholar]
- Skiba, Y.; Métodos, Y. Esquemas Numéricos: Un Análisis Computacional. In Dirección General de Publicaciones Y Fomento Editorial; Universidad Autónoma de México: Mexico City, Mexico, 2005. [Google Scholar]
- Mathews, J.H.; Fink, D.F. Métodos Numéricos con MATLAB; Prentice-Hall: Madrid, España, 2000. [Google Scholar]
- Caligaris, M.G.; Rodríguez, G.; Favieri, A.; Laugero, L. Desarrollo De Habilidades matemáticas Durante La resolución numérica De Problemas De Valor Inicial Usando Recursos tecnológicos. Rev. Digit. Educ. Ing. 2019, 14, 30–40. [Google Scholar] [CrossRef]
- Duarte, P.; Cristianini, M. Determining the Convective Heat Transfer Coefficient (h) in Thermal Process of Foods. Int. J. Food Eng. 2011, 7, 56–68. [Google Scholar]
- Zhukovsky, K.V.; Srivastava, H.M. Analytical solutions for heat diffusion beyond Fourier law. App. Maths Comp. 2017, 293, 423–437. [Google Scholar] [CrossRef]
- Hou, Q.; Lin, T.-C.; Wang, Z.-A. On a singularly perturbed semi-linear problem with robin boundary conditions. Disc. Cont. Dyna. Sys. Ser. B 2021, 26, 401–414. [Google Scholar] [CrossRef]
- Degond, P.; Génieys, S.; Jüngel, A. A steady-state system in non-equilibrium thermodynamics including thermal and electrical effects. Math. Meth. Appl. Sci. 1998, 21, 1399–1413. [Google Scholar] [CrossRef]
- Shi, J.; Jiang, F. On Neumann problem for the degenerate Monge–Ampère type equations. Bound Value Probl. 2021, 11. [Google Scholar] [CrossRef]
- Sadybekov, M.A.; Torebek, B.T.; Turmetov, B.K. Representation of the Green’s function of the exterior Neumann problem for the Laplace operator. Sib. Math. J. 2017, 58, 153–158. [Google Scholar] [CrossRef]
- Kreyszig, E. Advanced Engineering Mathematics; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Zill, D. Advanced Engineering Mathematics; Jones & Bartlett Learning: Burlington, MA, USA, 2018. [Google Scholar]
- Salazar, J.; Rosales, L. Simulación de la ecuación de conducción del calor en el proceso de ensamblaje de un sistema rotativo. In Memorias de las IX Jornadas de Investigación; UNEXPO: Puerto Ordaz, Venezuela, 2011; pp. 249–253. [Google Scholar]
- Perussello, C. Heat and mass transfer modeling of the osmo-convective drying of yacon roots. Appl. Therm. Eng. 2014, 63, 23–32. [Google Scholar] [CrossRef]
- Al-Zareer, M.; Dincer, I.; Rosen, M.A. Heat and mass transfer modeling and assessment of a new battery cooling system. Int. J. Heat Mass Transf. 2018, 126, 765–778. [Google Scholar] [CrossRef]
- Burden, R.L.; Faires, J.D. Numerical Analysis; Brooks/Cole Publishing Co.: New York, NY, USA, 1997. [Google Scholar]
- Nikan, O.; Jafari, H.; Golbabai, A. Numerical analysis of the fractional evolution model for heat flow in materials with memory. Alex. Eng. J. 2020, 59, 2627–2637. [Google Scholar] [CrossRef]
- Akbaş, Ş. Nonlinear static analysis of laminated composite beams under hygro-thermal effect. Struct. Eng. Mech. 2019, 72, 433–441. [Google Scholar] [CrossRef]
- Tinoco, H.A. Análisis del Efecto Termo-Elástico Como Inductor de Vibraciones en Rodamientos, Trabajo de Grado; Universidad Autónoma de Manizales, Facultad de Ingeniería, Programa de Ingeniería Mecánica: Caldas, Colombia, 2004; pp. 100–105. [Google Scholar]
- Chen, H.; Lin, S.; Xiong, C. Analysis and Modeling of Thermal Effect and Optical Characteristic of LED Systems with Parallel Plate-Fin Heatsink. IEEE Photonics J. 2017, 9, 1–11. [Google Scholar] [CrossRef]
- Agudelo, A.; Gónzalez, L.J. Ecuación Diferencial Asociada a los Polinomios Ortogonales Clásicos. Sci. Tech. 2004, 10, 179–184. [Google Scholar]
- Guo, Y.; Cao, X.; Liu, B.; Gao, M. Solving Partial Differential Equations Using Deep Learning and Physical Constraints. Appl. Sci. 2020, 10, 5917. [Google Scholar] [CrossRef]
- Zwarycz-Makles, K.; Majorkowska-Mech, D.; Runge-Kutta, G. Numerical Discretization Methods in Differential Equations of Adsorption in Adsorption Heat Pump. Appl. Sci. 2018, 8, 2437. [Google Scholar] [CrossRef]
- Lim, S.; Koo, M.-S.; Kwon, I.-H.; Park, S. Model Error Representation Using the Stochastically Perturbed Hybrid Physical–Dynamical Tendencies in Ensemble Data Assimilation System. Appl. Sci. 2020, 10, 9010. [Google Scholar] [CrossRef]
- Lipp, V.; Rethfeld, B.; García, M.; Ivanov, D. Solving a System of Differential Equations Containing a Diffusion Equation with Nonlinear Terms on the Example of Laser Heating in Silicon. Appl. Sci. 2020, 10, 1853. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| X(m) | Analytical Temperature (°C) | Numerical Temperature (FTCS) (°C) | Numerical Temperature (CN) (°C) | Numerical Temperature (BTCS) (°C) |
|---|---|---|---|---|
| 0 | 50.00 | 50.00 | 50.00 | 50.00 |
| 0.5 | 125.10 | 124.76 | 125.21 | 120.23 |
| 1.0 | 154.32 | 154.79 | 154.02 | 150.33 |
| 1.5 | 175.22 | 176.43 | 175.13 | 169.07 |
| 2.0 | 202.37 | 204.84 | 202.34 | 199.97 |
| 2.5 | 225.12 | 225.75 | 225.18 | 221.86 |
| 3.0 | 167.35 | 166.13 | 167.27 | 163.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suárez-Carreño, F.; Rosales-Romero, L. Convergency and Stability of Explicit and Implicit Schemes in the Simulation of the Heat Equation. Appl. Sci. 2021, 11, 4468. https://doi.org/10.3390/app11104468
Suárez-Carreño F, Rosales-Romero L. Convergency and Stability of Explicit and Implicit Schemes in the Simulation of the Heat Equation. Applied Sciences. 2021; 11(10):4468. https://doi.org/10.3390/app11104468
Chicago/Turabian StyleSuárez-Carreño, Franyelit, and Luis Rosales-Romero. 2021. "Convergency and Stability of Explicit and Implicit Schemes in the Simulation of the Heat Equation" Applied Sciences 11, no. 10: 4468. https://doi.org/10.3390/app11104468
APA StyleSuárez-Carreño, F., & Rosales-Romero, L. (2021). Convergency and Stability of Explicit and Implicit Schemes in the Simulation of the Heat Equation. Applied Sciences, 11(10), 4468. https://doi.org/10.3390/app11104468