Improving the Targets’ Trajectories Estimated by an Automotive RADAR Sensor Using Polynomial Fitting


Abstract
1. Introduction
2. Related Work
3. Reducing the Uncertainty at the Output of Kalman Filter by Post Processing
- The measurement of scatters received from each target [7];
- Estimation of range, radial velocity, azimuth and elevation angles, signal to noise (SNR) and other parameters of each target;
- Target detection;
- Data association (association of the measurements with the trajectories);
- Kalman filtering of each trajectory.
3.1. Data Association
- The evolution of objects is independent;
- The model of each object is a point at a given time;
- Each object produces at most a single measurement per scan/time frame.
- Joint likelihood (JL): a variation of the multi-hypothesis track splitting algorithm extended to multiple tracks [20];
- Joint probabilistic data association (JPDA): for each track, this algorithm updates the filter based on a joint probability of association of the latest set of measurements and each track [19];
- Multiple hypothesis joint probabilistic (MHJP): a variation of the optimal Bayesian filter using joint probabilities among multiple track associations for multiple hypotheses [18];
- Random finite sets (RFS) approaches: rely on modelling the objects and the measurements as random sets.
3.2. Kalman Filter
- Small values for the elements of the matrix Ez mean that we tend to rely more on the noisy measurement than on the prediction of the filter based on the model;
- Big values for the elements of the matrix Ex mean that we do not rely very much on the model.
3.3. Reducing the Uncertainty at the Output of Kalman Filter
3.3.1. Polynomial Fitting
- Polynomial fitting of the sequence : ;
- Inverting the result obtained: ;
- Polynomial fitting of the sequence : ;
- Substitution of the result of the second step into the result of the third step: .
3.3.2. Wavelet-Based Polynomial Fitting
- Computation of DWT and separation of detail coefficients;
- Nonlinear filtering of detail coefficients using (for example) the hard thresholding filter [24];
- Concatenation of the sequence of approximation coefficients, extracted in the first step with the new sequence of detail coefficients obtained after the second step and the computation of the IDWT.
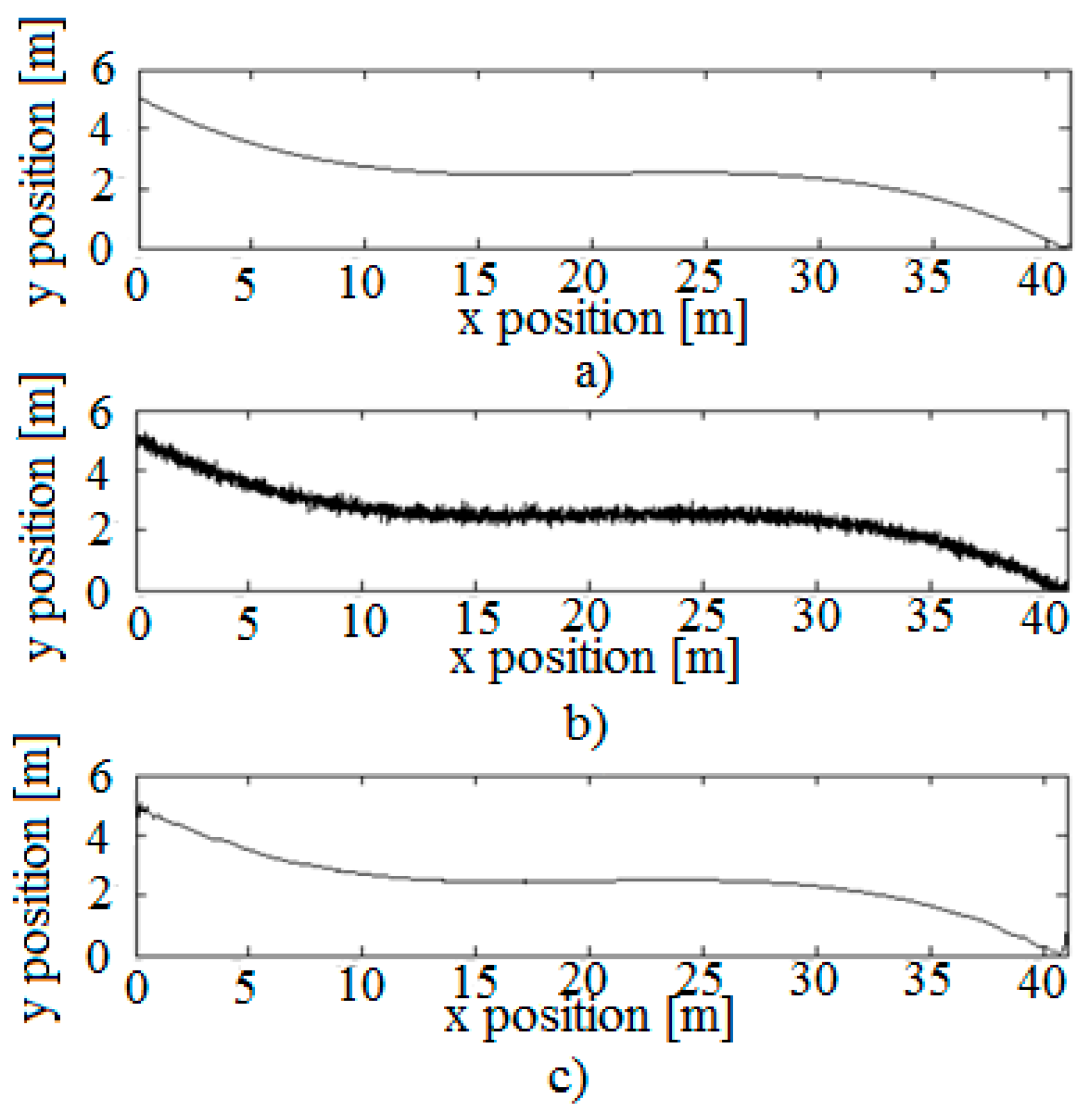
4. Results
4.1. Simulated Data
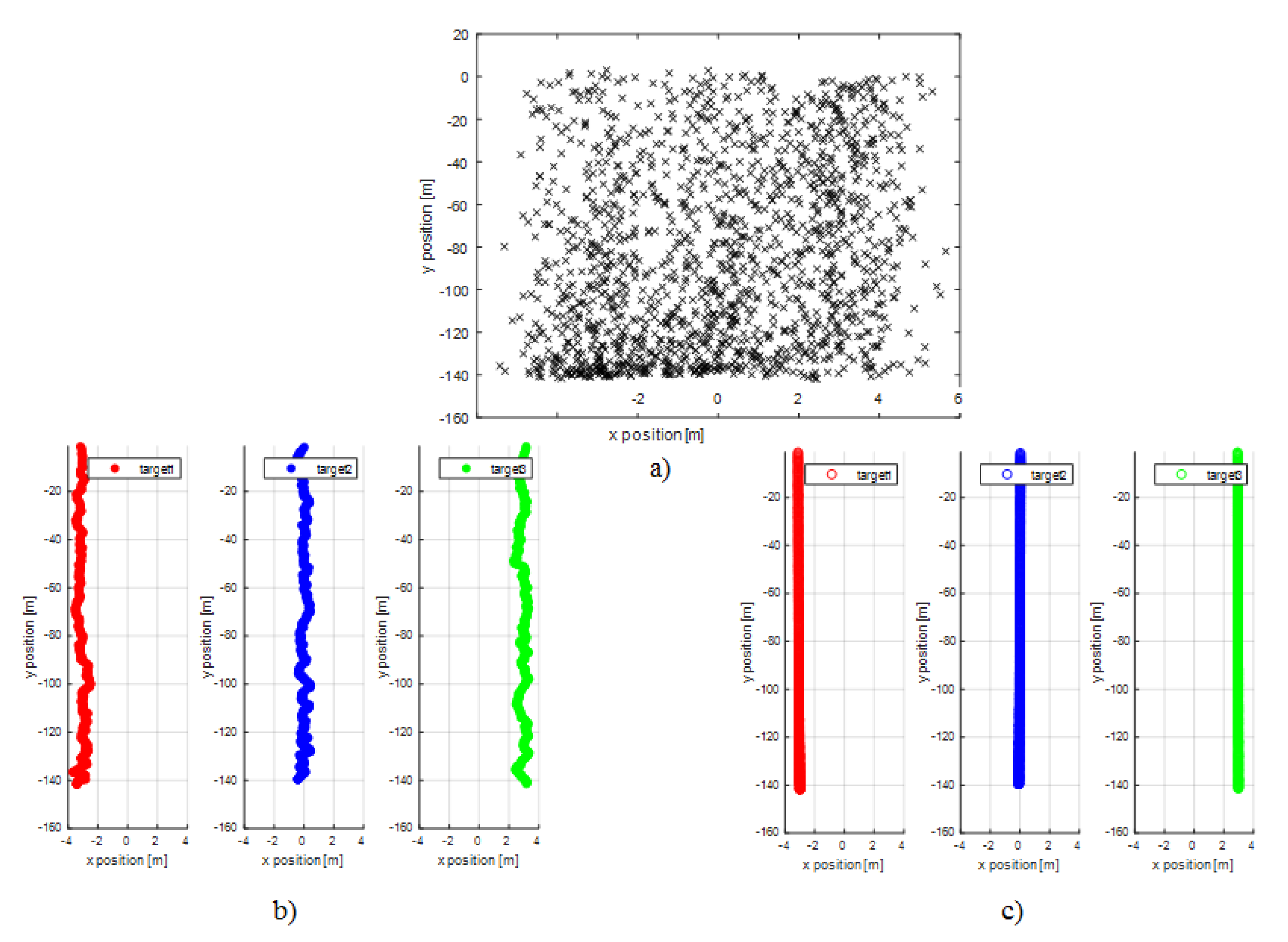
4.1.1. First Experiment
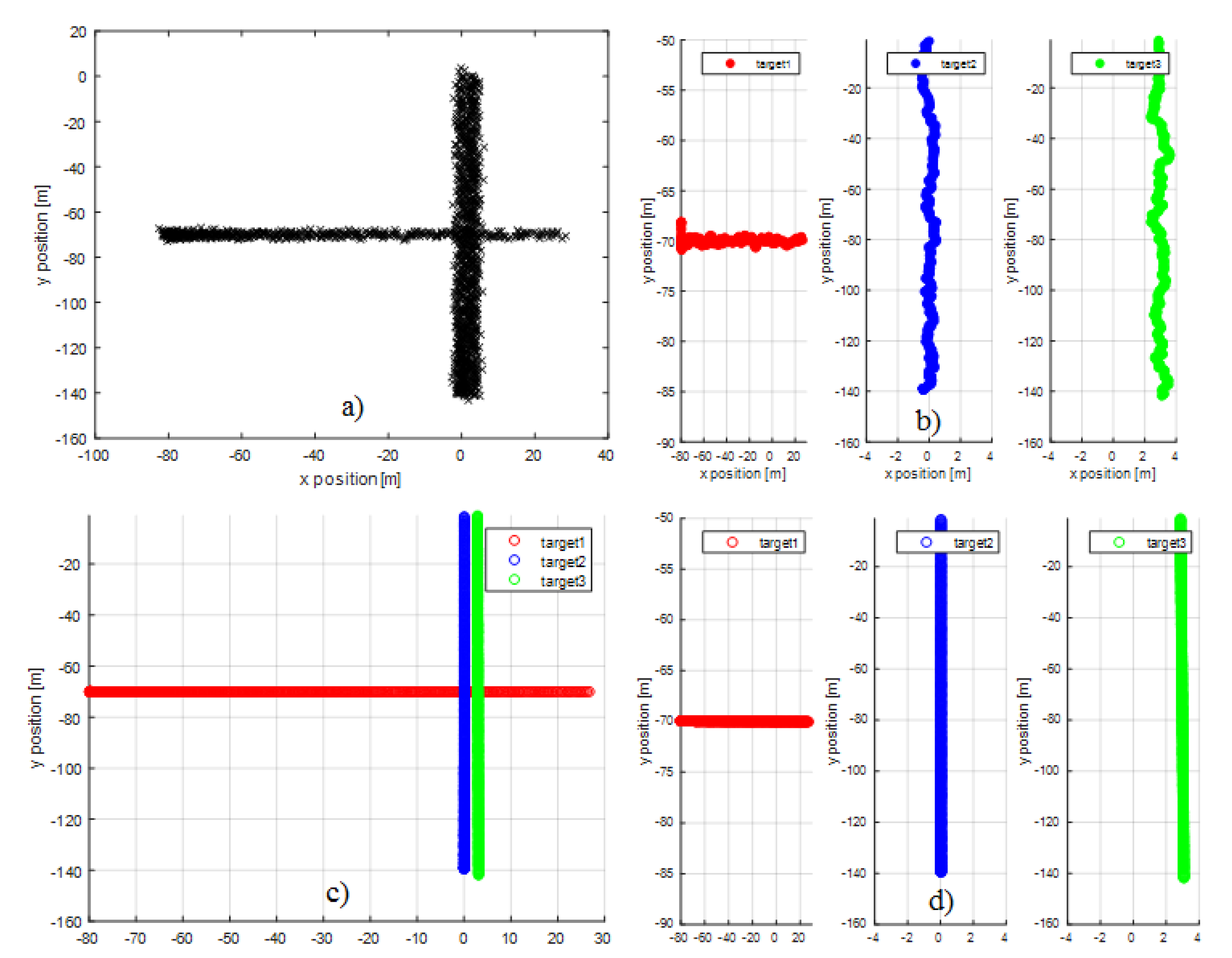
4.1.2. Second Experiment
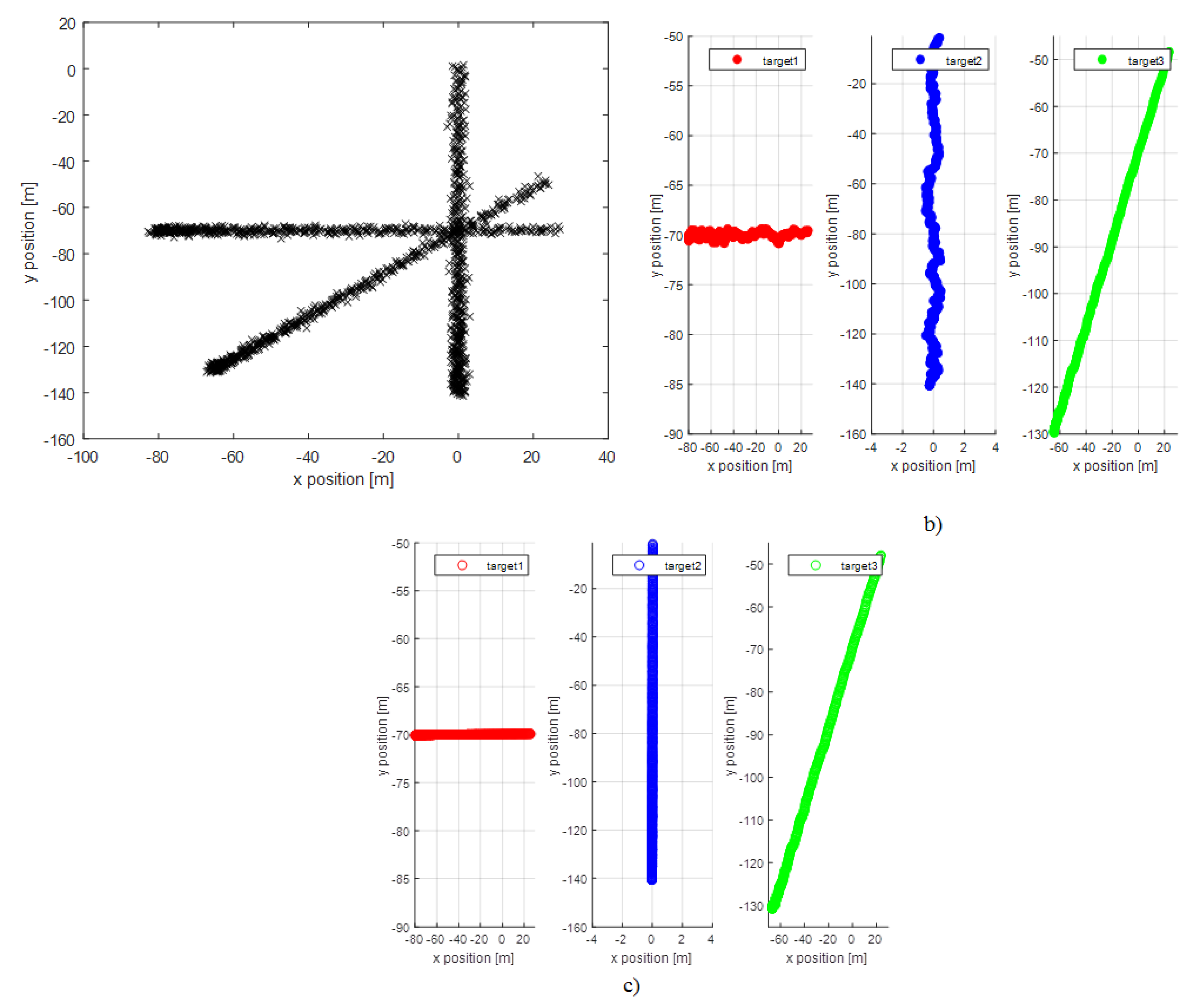
4.1.3. Third Experiment
4.1.4. Fourth Experiment
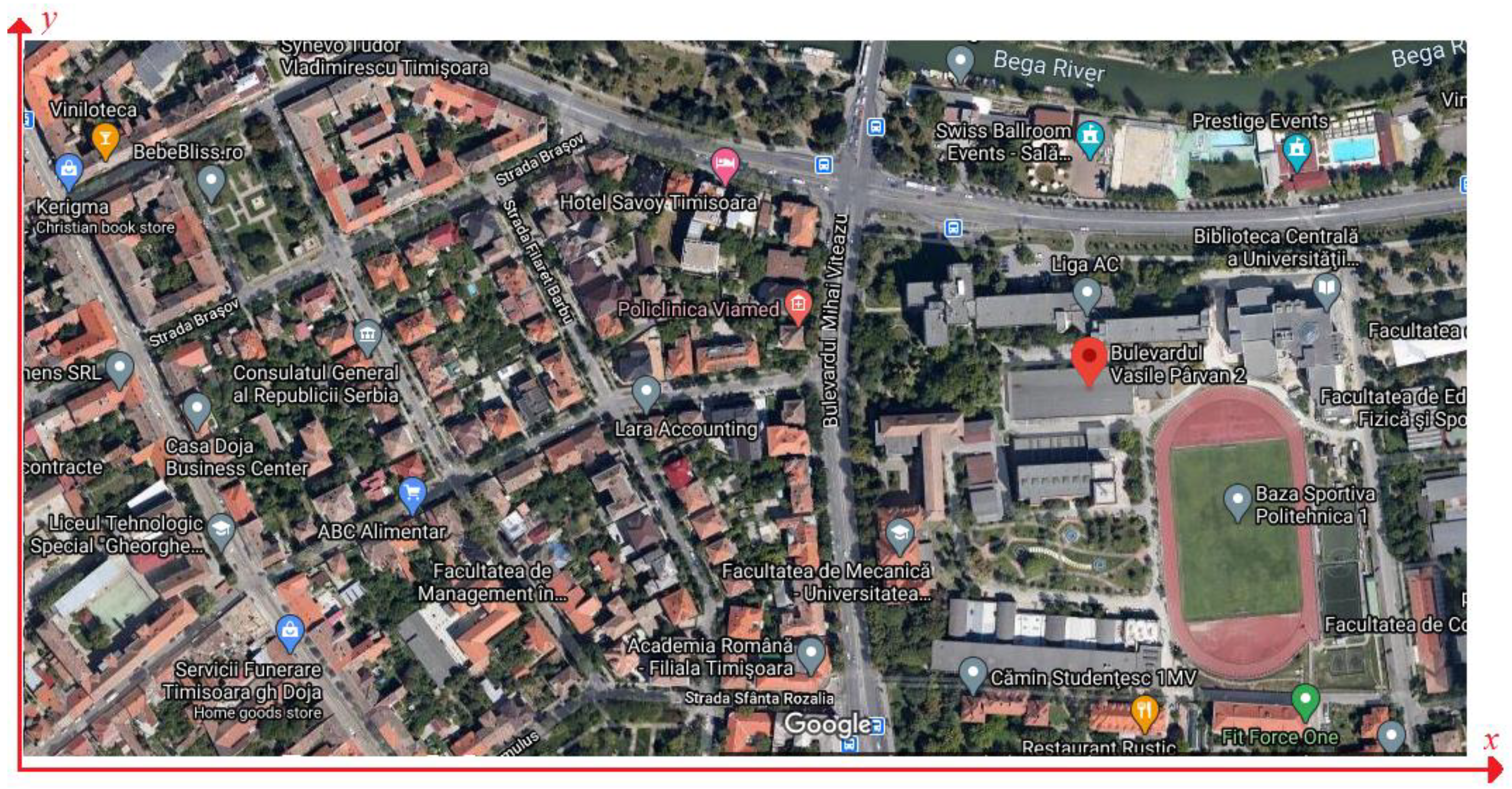
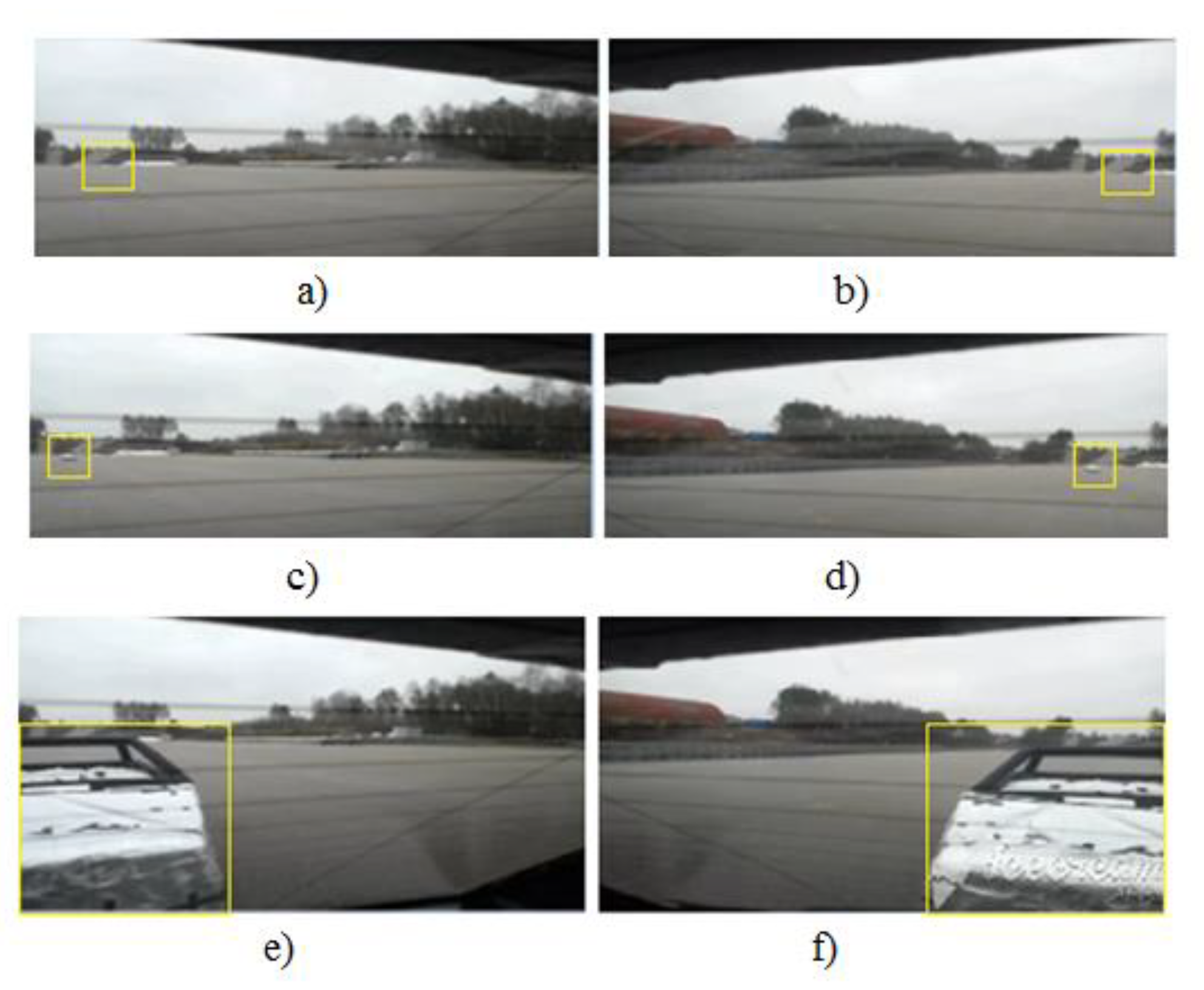
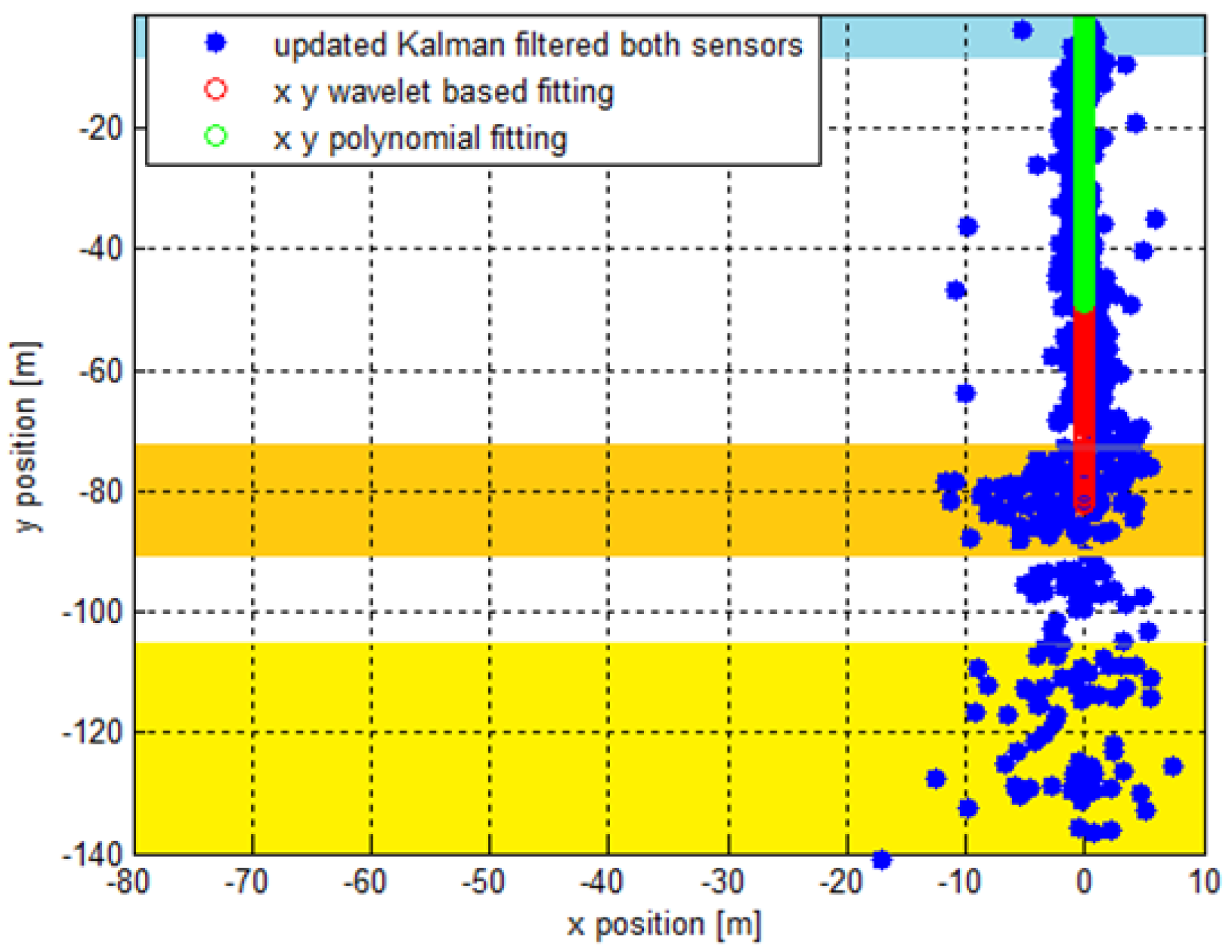
4.2. Real Data
- Tx modulation scheme—rapid chirps;
- Operation bandwidth—200 [MHz];
- Field of view (10 dBsm)—0° ± 75° @ 20 [m];
- Detection range (FoV):
- ○
- 5 dBsm @ 0° azimuth—68 [m]
- ○
- 10 dBsm @ 0° azimuth—105 [m]
- Range resolution—0.75 [m];
- Range precision—0.3 [m];
- Speed resolution—0.24 [m/s];
- Speed precision—0.05 [m/s];
- Azimuth angle precision—0.4 [°];
- Cycle count—50 [ms].
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blair, D. Radar Tracking Algorithms. In Principles of Modern Radar, Vol. I. Basic Principles; Richards, M.A., Scheer, J.A., Holm, W.A., Eds.; Scitech Publishing: New Jersey, NJ, USA, 2010; Chapter 19. [Google Scholar]
- Barratt, S.; Boyd, S. Fitting a Kalman Smoother to Data. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020. [Google Scholar] [CrossRef]
- Kalman, R. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Gelb, A. Applied Optimal Estimation; MIT Press: Boston, MA, USA, 1974. [Google Scholar]
- Google Earth. Available online: https://www.google.com/maps/place/Bulevardul+Vasile+P%C3%A2rvan+2,+Timi%C899oara/@45.7473276,21.2252909,295m/data=!3m1!1e3!4m13!1m7!3m6!1s0x47455d839fecfa97:0x31d3ec9211d27924!2sBulevardul+Vasile+P%C3%A2rvan+2,+Timi%C899oara!3b1!8m2!3d45.7468372!4d21.2272757!3m4!1s0x47455d839fecfa97:0x31d3ec9211d27924!8m2!3d45.7468372!4d21.2272757 (accessed on 11 July 2020).
- Magu, G.; Lucaciu, R. Multiple Radar Targets Tracking and Trajectories Fitting. In Proceedings of the International Symposium on Electronics and Telecommunications (ISETc), Timisoara, Romania, 5–6 November 2020. [Google Scholar]
- Patole, S.; Torlak, M.; Wang, D.; Ali, M. Automotive Radars. A review of signal processing techniques, Signal Processing for Smart Vehicle Technologies: Part 2. IEEE Signal Process. Mag. 2017, 22–35. [Google Scholar] [CrossRef]
- Shumway, R.H.; Stoffer, D.S. An approach to time series smoothing and forecasting using the EM algorithm. J. Time Ser. Anal. 1982, 3, 253–264. [Google Scholar] [CrossRef]
- Powell, T.D. Automated tuning of an extended Kalman filter using the downhill simplex algorithm. J. Guid. Control Dyn. 2002, 25, 901–908. [Google Scholar] [CrossRef]
- Abbeel, P.; Coates, A.; Montemerlo, M.; Ng, A.; Thrun, S. Discriminative training of Kalman filters. RSS 2005, 2, 1–8. [Google Scholar] [CrossRef]
- Oshman, Y.; Shaviv, I. Optimal tuning of a Kalman filter using genetic algorithms. In Proceedings of the AIAA GNC Conference, Denver, CO, USA, 14–17 August 2000; pp. 45–58. [Google Scholar] [CrossRef]
- Asmar, D.M.; Eslinger, G.J. Nonlinear Programming Approach to Filter Tuning. 2012. Available online: https://studylib.net/doc/15122813/nonlinear-programming-approach-to-filter-tuning (accessed on 15 November 2020).
- Chen, Z.; Heckman, C.; Julier, S.; Ahmed, N. Weak in the NEES? Auto-Tuning Kalman Filters with Bayesian Optimization. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1072–1079. [Google Scholar] [CrossRef]
- Goodall, C.; El-Sheimy, N. Intelligent tuning of a Kalman filter using low-cost MEMS inertial sensors. In Proceedings of the 5th International Symposium on Mobile Mapping Technology (MMT’07), Padua, Italy, 29–31 May 2007; pp. 1–8. [Google Scholar]
- Barratt, S.; Boyd, S. Least squares auto-tuning. Eng. Optim. 2020, 52. [Google Scholar] [CrossRef]
- Magu, G.; Lucaciu, R.; Isar, A. Polynomial Based Kalman Filter Result Fitting to Data. In Proceedings of the 43’th International Conference on Telecommunications and Signal Processing (TSP), Milan, Italy, 7–9 July 2020. [Google Scholar] [CrossRef]
- Kuhn, H.W. The Hungarian method for the assignment problem. Nav. Res. Logist. Q. 2005, 52, 7–21. [Google Scholar] [CrossRef]
- Tchamova, A.; Semerdjiev, T.; Konstantinova, P.; Dezert, J. Generalized Data Association for Multitarget Tracking in Clutter. In Advances and Applications of DSmT for Information Fusion (Collected works); Smarandache, F., Dezert, J., Eds.; American Research Press: Rehoboth, MA, USA, 2004; Volume 1, Chapter XIV; pp. 302–324. [Google Scholar]
- Granström, K.; Baum, M.; Reuter, S. Extended Object Tracking: Introduction, Overview and Applications. J. Adv. Inf. Fusion 2017, 12, 139–174. [Google Scholar]
- Perlovsky, L.I.; Deming, R.W. Maximum Likelihood Joint Tracking and Association in Strong Clutter. Int. J. Adv. Robot. Syst. 2013, 10, 1–9. [Google Scholar] [CrossRef]
- Macaveiu, A.; Câmpeanu, A.; Nafornita, I. Kalman-Based Tracker for Multiple Radar Targets. In Proceedings of the 10th International Conference on Communications (COMM), Bucharest, Romania, 29–31 May 2014; pp. 12–23. [Google Scholar] [CrossRef]
- Betzler, K. Fitting in Matlab. Available online: https://www.betzler.physik.uni-osnabrueck.de/Manuskripte/short/fits.pdf (accessed on 11 November 2020).
- Mallat, S. A Wavelet Tour of Signal Processing; Academic Press: Washington, DC, USA, 2001; p. 221. [Google Scholar]
- Donoho, D.L.; Johnstone, I.M. Ideal spatial adaptation by wavelet shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Katkovnik, V.; Egiazarian, K.; Astola, J. Local Approximation Techniques in Signal and Image Processing; SPIE Press: Washington, DC, USA, 2006; pp. 28–32. [Google Scholar] [CrossRef]
- Rybak, L.; Dudczyk, J. A Geometrical Divide of Data Particle in Gravitational Classification of Moons and Circles Data Sets. Entropy 2020, 22, 1088. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magu, G.; Lucaciu, R.; Isar, A. Improving the Targets’ Trajectories Estimated by an Automotive RADAR Sensor Using Polynomial Fitting. Appl. Sci. 2021, 11, 361. https://doi.org/10.3390/app11010361
Magu G, Lucaciu R, Isar A. Improving the Targets’ Trajectories Estimated by an Automotive RADAR Sensor Using Polynomial Fitting. Applied Sciences. 2021; 11(1):361. https://doi.org/10.3390/app11010361
Chicago/Turabian StyleMagu, Georgiana, Radu Lucaciu, and Alexandru Isar. 2021. "Improving the Targets’ Trajectories Estimated by an Automotive RADAR Sensor Using Polynomial Fitting" Applied Sciences 11, no. 1: 361. https://doi.org/10.3390/app11010361
APA StyleMagu, G., Lucaciu, R., & Isar, A. (2021). Improving the Targets’ Trajectories Estimated by an Automotive RADAR Sensor Using Polynomial Fitting. Applied Sciences, 11(1), 361. https://doi.org/10.3390/app11010361