Optimized Design of OTA-Based Gyrator Realizing Fractional-Order Inductance Simulator: A Comprehensive Analysis †





Abstract
1. Introduction
2. Methods
2.1. Ideal OTA-Based Gyrator
2.2. Practical OTA-Based Gyrator
2.2.1. Influence of OTA Terminal Impedances
- If there is a possibility to modify the fractance F, increase the values of both (gm1gm2) and F such that the ratio (gm1gm2)/F remains constant. This decreases the lower cut-off frequency ωGP1, and thus, expands the band of correct operation of the gyrator to lower frequencies without affecting the FO inductance. Moreover, the maximum obtainable magnitude of input admittance gm1gm2/GP1 increases.
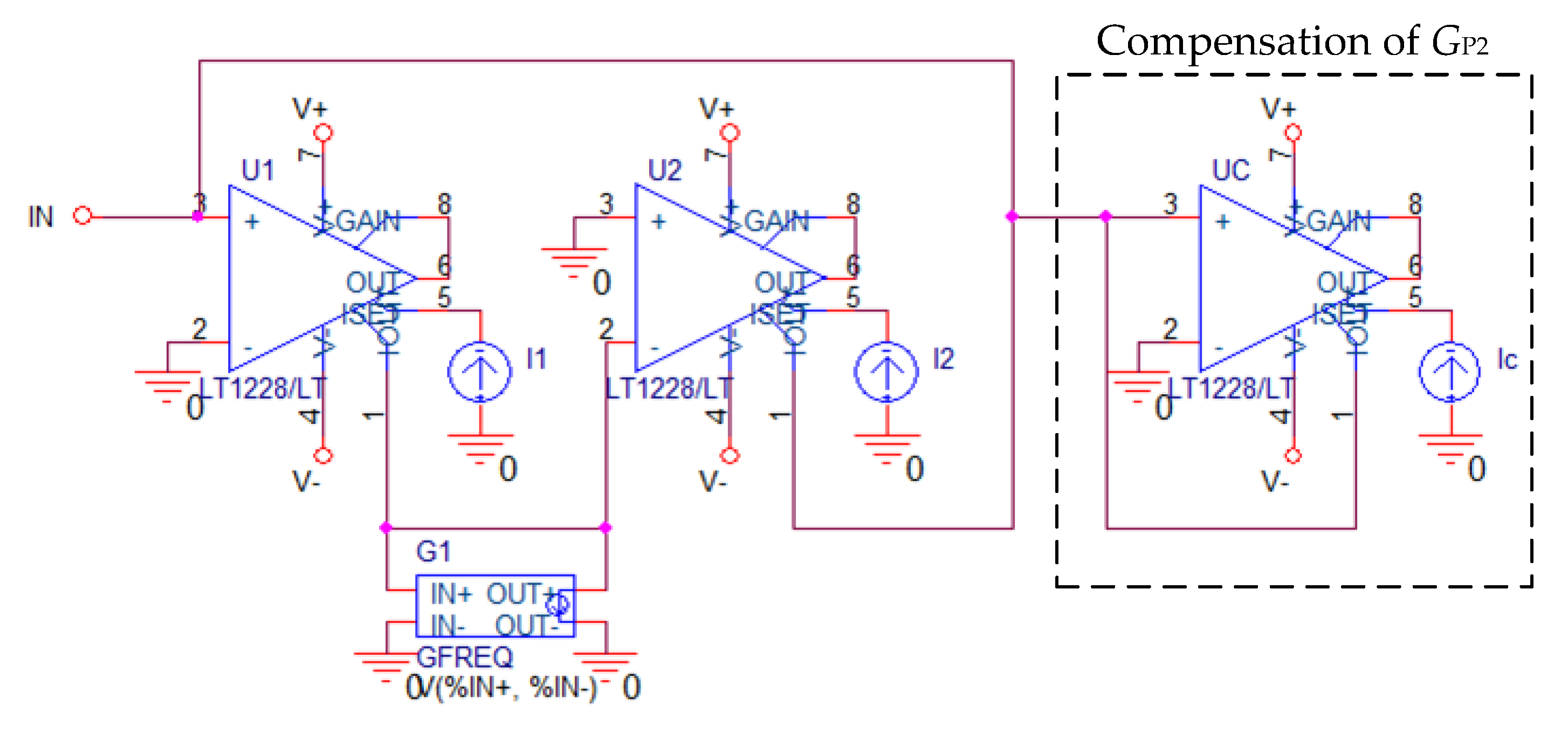
- From the OTA parasitic properties, the main effort should be to decrease GP1, which also brings a decrease of ωGP1 and an increase of maximum input admittance magnitude. Adherence to the recommendation on decreasing GP1 will also efficiently increase ωGP2, as due to the gyrator topology, we may assume GP1 ≈ GP2. This can be achieved by choosing an OTA structure that offers low parasitic conductance at input and output terminals. An alternative way to reduce a parasitic conductance in the gyrator is connecting a negative conductance in parallel as described in Section 2.2.2. To further optimize the gyrator operation at high frequencies in terms of increasing ωCP2, it is recommended to choose an OTA structure with low CP2.
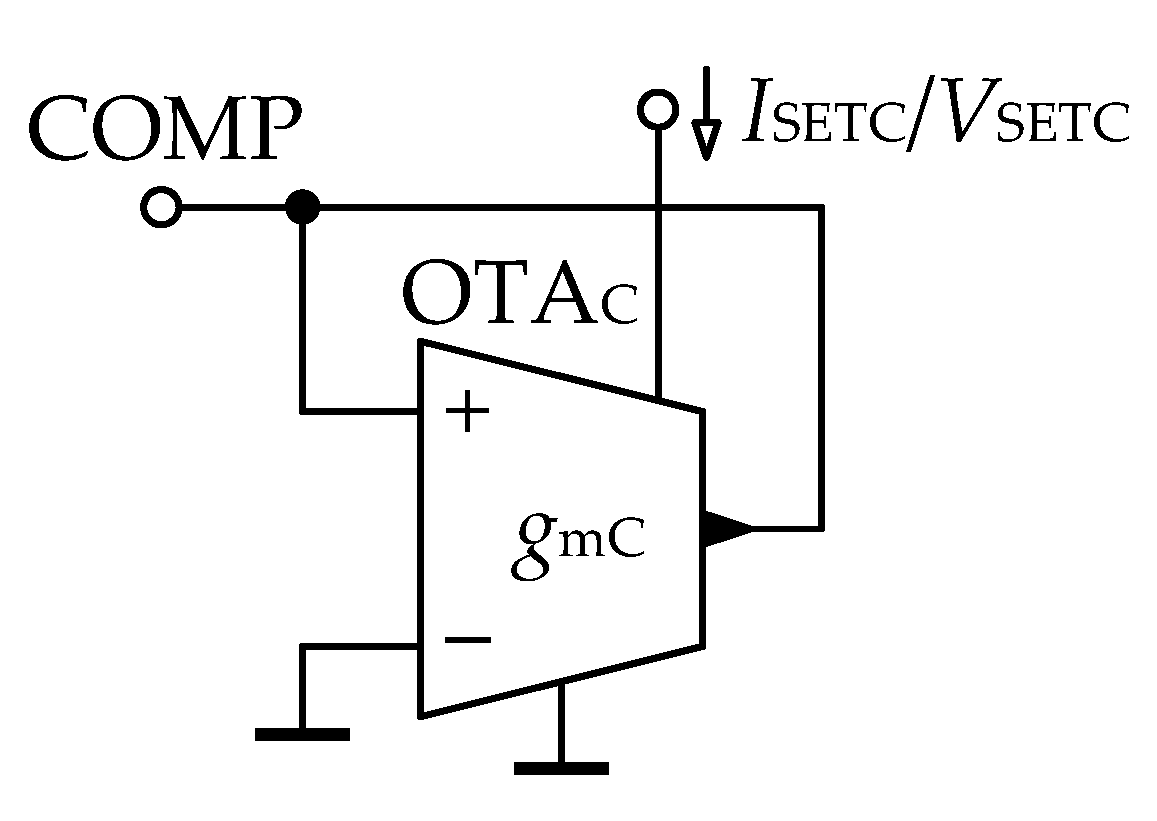
2.2.2. Compensation of Parasitic Conductance
2.2.3. Dynamic Properties
- The gyrator input voltage VIN must not be higher than the allowed input voltage range of OTA1 VOTA1,MAX
- The second condition for VIN provides that the voltage swing across the gyrator loading admittance Y does not exceed the maximum possible OTA2 input voltage VOTA2,MAX
2.3. Guidelines for Setting of Gyrator Parameters
- A.1.
- Choose the same gm1 and gm2 as the highest possible values for the correct functionality of the selected OTAs. The maximum transconductance values can be found in OTA documentation and are usually several hundreds of μS for CMOS and several tens of mS for BJT implementations. The choice of maximal transconductances extends the operating band to low frequencies. If this is not a priority, choose the transconductances equal to the required input admittance magnitude at the commonly used frequency, e.g., at the geometric mean of the operating band.
- A.2.
- Calculate the value of fractance F from the magnitude part of (6). If the value of F turns out too high for implementation, then it is possible to use the next set of rules labeled B, where a lower value of F can be set at the beginning. If F turns out too small, the only solution is to choose OTAs with higher maximum transconductances.
- A.3.
- Check the frequency range of the correct functionality of the gyrator, according to (8), (9), or (11). If the range is not sufficient, consider reducing parasitic conductance(s) by the compensation described in Section 2.2.2.
- A.4.
- To prevent the OTAs from the non-linear operation, ensure that the magnitude of the gyrator input voltage VIN meets both the conditions (13) and (14) simultaneously in the operating frequency band.
- B.1.
- Set a specific value of the fractance F. If a cut-off frequency ωGP1 should be reached without compensation of parasitic conductance GP1, the selected value F must be at least as determined from (8).
- B.2.
- Determine the required product gm1gm2 for the selected F and given FIN from the magnitude part of (6). Evaluate whether the product is achievable by the selected OTAs. If not, F must be reduced for the design to continue (regardless of fulfilling (8) in the previous step).
- B.3.
- Choose gm2 as the highest possible value for the proper functionality of the selected OTA2.
- B.4.
- Calculate gm1 from the magnitude part of (6). If the ratio gm1/gm2 turns out excessively low, then it is possible to decrease gm2 and an increase gm1 such that their product remains the same. However, keep in mind that decreasing gm2 may decrease the allowed gyrator input voltage, according to (14).
- B.5.
- Check the frequency range of the correct functionality of the gyrator, according to (8), (9), or (11). If the range is not sufficient, consider reducing parasitic conductance(s) by the compensation described in Section 2.2.2.
- B.6.
- To prevent the OTAs from the non-linear operation, ensure that the magnitude of the gyrator input voltage VIN meets both the conditions (13) and (14) simultaneously in the operating frequency band.
2.4. Differential (Floating) Version of the Gyrator
3. Simulation Results and Discussion
3.1. Gyrator Simulation and Optimization
3.2. Inductance Simulator for Fractional-Order Respiratory Model
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kubanek, D.; Koton, J.; Dvorak, J.; Herencsar, N.; Sotner, R. Analysis of OTA-Based Gyrator Implementing Fractional-Order Inductor. In Proceedings of the 43rd International Conference on Telecommunications and Signal Processing (TSP), Milan, Italy, 7–9 July 2020; pp. 583–588. [Google Scholar] [CrossRef]
- Elwakil, A. Fractional-order circuits and systems: An emerging interdisciplinary research area. IEEE Circuits Syst. Mag. 2010, 10, 40–50. [Google Scholar] [CrossRef]
- Tepljakov, A. Fractional-Order Modeling and Control of Dynamic Systems; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Shah, Z.M.; Kathjoo, M.Y.; Khanday, F.A.; Biswas, K.; Psychalinos, C. A survey of single and multi-component Fractional-Order Elements (FOEs) and their applications. Microelectron. J. 2019, 84, 9–25. [Google Scholar] [CrossRef]
- Adhikary, A.; Khanra, M.; Sen, S.; Biswas, K. Realization of a carbon nanotube based electrochemical fractor. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 2329–2332. [Google Scholar] [CrossRef]
- Adhikary, A.; Sen, S.; Biswas, K. Practical realization of tunable fractional-order parallel resonator and fractional-order filters. IEEE Trans. Circ. Syst. I Fundam. Theory Appl. 2016, 63, 1142–1151. [Google Scholar] [CrossRef]
- Adhikary, A.; Sen, S.; Biswas, K. Design and hardware realization of a tunable fractional-order series resonator with high quality factor. Circ. Syst. Signal Process. 2016, 36, 3457–3476. [Google Scholar] [CrossRef]
- Tsirimokou, G.; Psychalinos, C.; Elwakil, A.S.; Salama, K.N. Electronically tunable fully integrated fractional-order resonator. IEEE Trans. Circ. Syst. II 2018, 65, 166–170. [Google Scholar] [CrossRef]
- Radwan, A.G.; Fouda, M.E. Optimization of fractional-order RLC filters. Circuits Syst. Signal Process. 2013, 32, 2097–2118. [Google Scholar] [CrossRef]
- Freeborn, T.J.; Maundy, B.; Elwakil, A.S. Fractional resonance based RLβCα filters. Math. Probl. Eng. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- Ionescu, C.M.; Keyser, R.D. Time domain validation of a fractional order model for human respiratory system. In Proceedings of the 14th IEEE Mediterranean Electrotechnical Conference, Ajaccio, France, 5–7 May 2008; pp. 89–95. [Google Scholar] [CrossRef]
- Freeborn, T.J. A survey of fractional-order circuit models for biology and biomedicine. IEEE J. Emerg. Select. Top. Circ. Syst. 2013, 3, 416–424. [Google Scholar] [CrossRef]
- Schäfer, I.; Krüger, K. Modelling of lossy coils using fractional derivatives. J. Phys. D Appl. Phys. 2008, 41, 045001. [Google Scholar] [CrossRef]
- Zhang, G.; Ou, Z.; Qu, L. A Fractional-Order Element (FOE)-Based Approach to Wireless Power Transmission for Frequency Reduction and Output Power Quality Improvement. Electronics 2019, 8, 1029. [Google Scholar] [CrossRef]
- Kuo, F. Network Analysis and Synthesis; John Wiley & Sons Inc: New York, NY, USA, 1966. [Google Scholar]
- Valkenburg, M.E. Network Analysis; Prentice Hall: Toronto, ON, Canada, 1974. [Google Scholar]
- Kartci, A.; Agambayev, A.; Farhat, M.; Herencsar, N.; Brancik, L.; Bagci, H.; Salama, K.N. Synthesis and optimization of fractional-order elements using a genetic algorithm. IEEE Access 2019, 7, 80233–80246. [Google Scholar] [CrossRef]
- Tsirimokou, G.; Kartci, A.; Koton, J.; Herencsar, N.; Psychalinos, C. Comparative Study of Discrete Component Realizations of Fractional-Order Capacitor and Inductor Active Emulators. J. Circuits Syst. Comput. 2018, 27, 1–26. [Google Scholar] [CrossRef]
- Deliyannis, T.; Sun, Y.; Fidler, J.K. Continuous-Time Active Filter Design; CRC Press: Boca Raton, CA, USA, 1999. [Google Scholar]
- Adhikary, A.; Sen, P.; Sen, S.; Biswas, K. Design and Performance Study of Dynamic Fractors in Any of the Four Quadrants. Circuits Syst. Signal Process. 2016, 35, 1909–1932. [Google Scholar] [CrossRef]
- Adhikary, A.; Choudhary, S.; Sen, S. Optimal Design for Realizing a Grounded Fractional Order Inductor Using GIC. IEEE Trans. Circuits Syst. I Reg. Pap. 2018, 65, 2411–2421. [Google Scholar] [CrossRef]
- Khattab, K.H.; Madian, A.H.; Radwan, A.G. CFOA-based fractional order simulated inductor. In Proceedings of the 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, UAE, 16–19 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Geiger, R.L.; Sánchez-Sinencio, E. Active filter design using operational transconductance amplifiers: A tutorial. IEEE Circuits Devices Mag. 1985, 1, 20–32. [Google Scholar] [CrossRef]
- Sotner, R.; Jerabek, J.; Kartci, A.; Domansky, O.; Herencsar, N.; Kledrowetz, V.; Alagoz, B.B.; Yeroglu, C. Electronically reconfigurable two-path fractional-order PI/D controller employing constant phase blocks based on bilinear segments using CMOS modified current differencing unit. Microelectron. J. 2019, 86, 114–129. [Google Scholar] [CrossRef]
- Bakken, T.; Choma, J. Gyrator-Based Synthesis of Active On-Chip Inductances. Analog Integr. Circuits Signal Process. 2003, 34, 171–181. [Google Scholar] [CrossRef]
- LT1228 100 MHz Current Feedback Amplifier with DC Gain Control; Datasheet; Linear Technology: Milpitas, CA, USA, 2012.
- Cadence Design Systems. PSpice® User’s Guide; Cadence Design Systems: Portland, OR, USA, 2000. [Google Scholar]
- Tsirimokou, G. A Systematic Procedure for Deriving RC Networks of Fractional-Order Elements Emulators Using MATLAB. Int. J. Electron. Commun. 2017, 78, 7–14. [Google Scholar] [CrossRef]
- Valsa, J.; Vlach, J. RC models of a constant phase element. Int. J. Circuit. Theory Appl. 2013, 41, 59–67. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| gm1 = gm2 (mS) | α | F (F·secα–1) | GFREQ TABLE | fGP1 (Hz) | min{fGP2, fCP2′} (Hz) |
|---|---|---|---|---|---|
| 1 | 0.25 | 11.23 μ | (10m,-105,22.5) (100meg,-55,22.5) | 6.25 m | 24.5 M |
| 1 | 0.5 | 1.262 μ | (10m,-130,45) (100meg,-30,45) | 2.5 | 4.54 M |
| 1 | 0.75 | 141.7 n | (10m,-155,67.5) (100meg,-5,67.5) | 18.4 | 1.36 M |
| 1 | 1 | 15.92 n | Classic capacitor 15.92 nF instead of GFREQ | 50 | 553 k |
| gm1 = gm2 (mS) | α | F (F·secα–1) | GFREQ TABLE | fGP1 (Hz) | min{fGP2, fCP2′} (Hz) |
|---|---|---|---|---|---|
| 20 | 0.25 | 4.493 m | (10m,-52.96,22.5) (100meg,-2.96,22.5) | 39.1 n | 24.5 M |
| 20 | 0.5 | 504.6 μ | (10m,-77.96,45) (100meg,22.04,45) | 6.25 m | 4.54 M |
| 20 | 0.75 | 56.68 μ | (10m,-102.96,67.5) (100meg,47.04,67.5) | 339 m | 464 k (918 k) |
| 20 | 1 | 6.366 μ | Classic capacitor 6.366 μF instead of GFREQ | 2.5 | 100 k (391 k) |
| Set | α = 0.25 | α = 0.5 | α = 0.75 | α = 1 |
|---|---|---|---|---|
| 1 | 62 Hz–395 kHz | 950–1 MHz | 1.44 kHz–226 kHz | 1.45 kHz–72 kHz |
| 2 | 0.4 mHz–2.43 MHz | 2.4 Hz–24.6 kHz | 26 Hz–173 kHz | 71 Hz–148 kHz |
| R0 (kΩ) | R1 (kΩ) | R2 (kΩ) | R3 (kΩ) | R4 (kΩ) |
|---|---|---|---|---|
| 150 | 100 | 39 | 16 | 6.8 |
| C0 (nF) | C1 (μF) | C2 (nF) | C3 (nF) | C4 (nF) |
| 56 | 2 | 750 | 270 | 100 |
| f (Hz) | VIN (μV) | IIN (mA) | VLOAD (mV) | ILOAD (μA) |
|---|---|---|---|---|
| 4 | 87.5 | 1 | 50 | 1.75 |
| 25 | 206 | 1 | 50 | 4.13 |
| 48 | 280 | 1 | 50 | 5.61 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kubanek, D.; Koton, J.; Dvorak, J.; Herencsar, N.; Sotner, R. Optimized Design of OTA-Based Gyrator Realizing Fractional-Order Inductance Simulator: A Comprehensive Analysis. Appl. Sci. 2021, 11, 291. https://doi.org/10.3390/app11010291
Kubanek D, Koton J, Dvorak J, Herencsar N, Sotner R. Optimized Design of OTA-Based Gyrator Realizing Fractional-Order Inductance Simulator: A Comprehensive Analysis. Applied Sciences. 2021; 11(1):291. https://doi.org/10.3390/app11010291
Chicago/Turabian StyleKubanek, David, Jaroslav Koton, Jan Dvorak, Norbert Herencsar, and Roman Sotner. 2021. "Optimized Design of OTA-Based Gyrator Realizing Fractional-Order Inductance Simulator: A Comprehensive Analysis" Applied Sciences 11, no. 1: 291. https://doi.org/10.3390/app11010291
APA StyleKubanek, D., Koton, J., Dvorak, J., Herencsar, N., & Sotner, R. (2021). Optimized Design of OTA-Based Gyrator Realizing Fractional-Order Inductance Simulator: A Comprehensive Analysis. Applied Sciences, 11(1), 291. https://doi.org/10.3390/app11010291