Review of Indoor Positioning: Radio Wave Technology

 , ,
, ,  ,
,  ,
,  and
and
Abstract
1. Introduction
2. Parameter Based Positioning
2.1. RSSI
2.2. TOA
2.3. TDOA
2.4. RTT
2.5. AOA and ADOA
2.6. DOA
2.7. POA and PDOA
2.8. CSI
2.9. RSRP and RSRQ
3. Radio Signals-Based Positioning
3.1. Wi-Fi Technology
3.2. Bluetooth Technology
3.3. ZigBee Technology
3.4. RFID Technology
3.5. UWB Technology
3.6. Cellular Technology
4. Positioning Algorithms
4.1. Proximity Algorithm
4.2. Triangulation Algorithm
4.3. Multilateration Algorithm
4.4. Min–Max Algorithm
4.5. Maximum Likelihood Algorithm
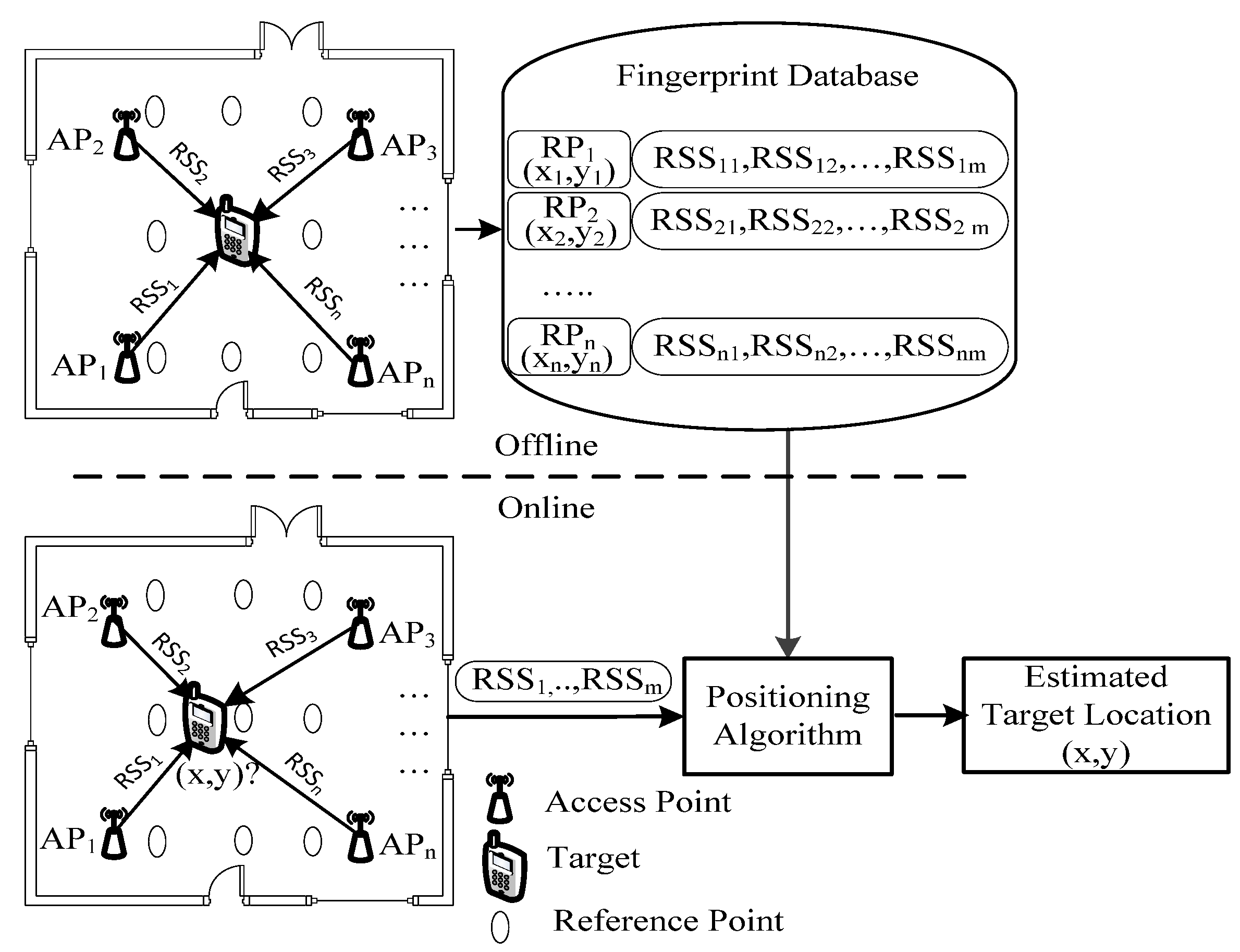
4.6. Fingerprinting Localization Algorithm
4.7. Radio Map Construction Aiding the Offline Workload
4.8. Machine Learning Localization Approach
- Classification algorithm: most of the classification algorithms are based on supervised learning. There are two phases in supervised learning—the training phase and testing phase. In the training phase, received signal strengths need to know their labels to set up the dataset. Then, in the testing phase, the assigned label data need to predict the discrete output values. The classification method under supervised learning, such as NN, KNN, WKNN, SVM, sequential minimal optimization (SMO), Naive Bayes Classifier (NBC), Bayesian network, random forest (RF) classifier, decision tree (DT), boost and bagged were used as a classifier to outperform the indoor positioning methods [213]. Among them, KNN initially emerged as a nearest location estimation in RADAR, which is effective with simplicity. However, it cannot work well for a computational metric due to multiple environmental changes and often has low positioning accuracy. Therefore, the authors in [221] introduced a way to improve the performance of KNN in the field of the GSM network. Popular for indoor positioning, KNN is used for the weighted centroid of relative position for fingerprinting estimation. In addition, the weighted KNN of FP localization and weighted values of RPs certainly depend on their Euclidean distance [222]. The authors in [223] found that fingerprinting localization by using beacon technology (a small radio transmitter) can be combined with a weighted centroid localization method (WCL) and WKNN, in order to reduce the number of RPs over the localization space. NN, KNN and WKNN have been used for the estimation of distance measurements related to the Euclidean distance of a nearest neighbour which has features based on the class of their nearest neighbour in the dataset. WKNN is an extension of KNN, and in that case, the weighted K values are the largest. If all weighted values of WKNN are equal to one, it reduces to the KNN method. In [224], rank-based fingerprinting (RBF) are compared with NN and WKNN in order to investigate the problem of the RSS variant by addressing the drawback without the calibration process. SVM and NBC can also give the desired accuracies for the Wi-Fi fingerprinting system [225]. DT is a tree-like model, in combination with root (nodes), branches (non-terminal nodes) and leaf (terminal nodes). In [226], the authors show the comparison of DT, NN and a neural network based on the WLAN of an indoor environment, in which the location of the user is determined from the DT. Moreover, DT, Adaboost, Bagged, and RF are also used not only as classifiers but also as regression algorithms.
- Clustering algorithm: most clustering problems are solved with unsupervised learning, which can identify hidden patterns from the data analysis and can predict future values. In indoor localization, K-means, fuzzy C-Mans, neural network, and SVM-C have been used for the implementation of indoor positioning methods. Machine learning of RPs clustering and recognition algorithms can provide the determination of positioning accuracy. The traditional RPs clustering method is needed to pre-define the more accurate positions, since the uncertain number of clusters give rise to poor accuracy [227]. In [228], K-means FP clustering is applied to separate multi-floor levels for a smart building system. In [229], K-means-based approach was used to improve the performance of a distance estimation KNN which determines the close distance values of a mobile user’s nearest location. Moreover, the fuzzy C-means clustering method is used to develop KNN performance [230,231].
- Matching algorithm: a matching algorithm aims to find the best match resulting in the correct predicted location between the current FPs’ location as measured by the client mobile device in the online phase fingerprinting [232,233]. Although the fingerprinting-based localization algorithm finds the user location, this needs to obtain the exact location of the user inside the indoor environment. Moreover, the FP matching algorithm of WLAN-based positioning could have the enhanced ability for more accurate positioning performance. In [233] is described the superior FPs WLAN system which has a 26% better precision than the conventional fingerprinting localization method. The distance computing of KNN is commonly useful for a matching algorithm as the location determination method. A criticism of KNN is that the software computational time is high in the framework [234,235]. To overcome this problem, the segmentation-based KNN method describing the improvement of the positioning accuracy is 9.24% in the magnetic field indoor location [235]. The magnetometer is one of the IMU sensors that measures the strength of the Earth’s magnetic field. In [234] is shown the improvement in indoor positioning accuracy of 91.7% by using a matching KNN algorithm for positioning technology using a geomagnetic field, countering the issues of radio technologies effected from environments, such as multipath noise, human motion and impact obstacles. In [236], the path matching algorithm of indoor positioning for a magnetic field is proposed by solving the time-variant positioning system without influencing radio wave technology. It is certainly true that radio technology benefits wireless sensing networks of a practical indoor location, but there could be environmental influences. The updated indoor positioning system of the Wi-Fi-based RSSI can improve the positioning performance from digital map matching information which makes use of PDR [236,237,238,239,240,241]. Indoor map matching methods could make use of the information by utilizing smartphones, already making three aspects accessible: mapping path data, user movement activities and position.
4.9. Filtering Approach
4.10. Reference-Free Approach
4.11. Uncooperative Localization Approach
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| AGPS | Assisted-global positioning system |
| AGNSS | Assisted-global navigation satellite systems |
| AOA | Angle of arrival |
| ADOA | Angle difference of arrival |
| APs | Access points |
| BLE | Bluetooth low energy |
| CSI | Channel state information |
| CSMA/CA | Carrier-sense multiple access/collision avodiance |
| DAS | Distributed antenna system |
| DOA | Direction of arrival |
| DL-ELM | Extreme learning machine with dead zone |
| ELM | Extreme learning machine |
| DZ-ELM | Dead zone extreme learning machine |
| DT | Decision tree |
| EKF | Extended Kalman filter |
| FTM | Fine time measurement |
| FPs | Fingerprints |
| FG | Factor graph |
| GPS | Global positioning system |
| GNSS | Global navigation satellite systems |
| GSM | Global system for mobile communication |
| GPF | Gaussian particle filter |
| GP-LVM | Gaussian process latent variable model |
| IPS | Indoor positioning system |
| ILS | Indoor localization services |
| IoT | Internet of things |
| INS | Inertial navigation system |
| IR | Infrared |
| IMU | Inertial measurement unit |
| IEEE | Institution of Electrical and Electronic Engineering |
| JDTDOA | Joint direction and time difference of arrival |
| KNN | K-nearest neighbour |
| KF | Kalman filter |
| KPCA | Kernel principle component analysis |
| LoS | Line-of-sight |
| LED | Light-emitting diode |
| LTE | Long-term evolution |
| LoRa | Long-range radio |
| LQI | Link quality indication |
| MEMS | Micro-electro-mechanical-systems |
| MPS | Magnetic positioning system |
| MAC | Medium access control |
| MMSE | Minimum mean square error |
| MDS | Multidimensional scaling |
| NLoS | Non-line-of-sight |
| NFC | Near field communication |
| NN | Nearest neighbor |
| NBC | Naive Bayes classifier |
| NLS | Nonlinear least squares |
| OSI | Open system interconnection |
| OFDM | Orthogonal frequency division multiplexing |
| OS-ELM | Online Sequential extreme learning machine |
| PDR | Pedestrian dead reckoning |
| POA | Phase of arrival |
| PDOA | Phase difference of arrival |
| PHY | Physical layer |
| PF | Particle filter |
| PRS | Positioning reference signals |
| Probability distribution function | |
| PCA | Principal component analysis |
| RSRP | Reference signal received power |
| RSRQ | Reference signal received quality |
| RFID | Radio frequency identification |
| RSS | Received signal strength |
| RSSI | Received signal strength indicator |
| RTOF | Round trip time of flight |
| RTT | Round trip time |
| RTOA | Round trip time of arrival |
| RP | Reference point |
| RF | Random Forest |
| RSSD | Received signal strength difference |
| RBPF | Rao-Blackwellized particle filter |
| RBF | Rank-based fingerprinting |
| SVM | Support vector machine |
| SLAM | Simultaneous localization and mapping |
| SMO | Sequential minimal optimization |
| SLFNs | Single-hidden layer feedforward neural networks |
| TOA | Time of arrival |
| TDOA | Time difference on arrival |
| TOF | Time of flight |
| UWB | Ultra-wide band |
| VLC | Visible light communication |
| WLAN | Wireless local area network |
| WKNN | Weighted K-nearest neighbour |
| WCL | Weight centroid localization |
| WSNs | Wireless sensor networks |
| 3GPP | 3rd Generation Partnership Project |
References
- Rusli, M.E.; Ali, M.; Jamil, N.; Din, M.M. An Improved Indoor Positioning Algorithm Based on RSSI-Trilateration Technique for Internet of Things (IOT). In Proceedings of the 2016 International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia, 26–27 July 2016; pp. 72–77. [Google Scholar]
- Hou, Z.-G.; Fang, L.; Yi, Y. An Improved Indoor UHF RFID Localization Method Based on Deviation Correction. In Proceedings of the 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–25 July 2017; pp. 1402–1405. [Google Scholar]
- Geok, T.K.; Hossain, F.; Kamaruddin, M.N.; Rahman, N.Z.A.; Thiagarajah, S.; Chiat, A.T.W.; Hossen, J.; Liew, C.P. A Comprehensive Review of Efficient Ray-Tracing Techniques for Wireless Communication. Int. J. Commun. Antenna Propag. (IRECAP) 2018, 8, 123. [Google Scholar] [CrossRef]
- Hossain, F.; Geok, T.K.; Rahman, T.A.; Hindia, M.N.; Dimyati, K.; Tso, C.P.; Kamaruddin, M.N. A Smart 3D RT Method: Indoor Radio Wave Propagation Modelling at 28 GHz. Symmetry 2019, 11, 510. [Google Scholar] [CrossRef]
- Hossain, F.; Kim Geok, T.; Abd Rahman, T.; Nour Hindia, M.; Dimyati, K.; Ahmed, S.; Tso, C.P.; Abdaziz, A.; Lim, W.; Mahmud, A.; et al. Indoor 3-D RT Radio Wave Propagation Prediction Method: PL and RSSI Modeling Validation by Measurement at 4.5 GHz. Electronics 2019, 8, 750. [Google Scholar] [CrossRef]
- Geok, T.K.; Hossain, F.; Chiat, A.T.W. A novel 3D ray launching technique for radio propagation prediction in indoor environments. PLoS ONE 2018, 13, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Hossain, F.; Geok, T.K.; Rahman, T.A.; Hindia, M.N.; Dimyati, K.; Abdaziz, A. Indoor Millimeter-Wave Propagation Prediction by Measurement and Ray Tracing Simulation at 38 GHz. Symmetry 2018, 10, 464. [Google Scholar] [CrossRef]
- Hossain, F.; Geok, T.K.; Rahman, T.A.; Hindia, M.N.; Dimyati, K.; Ahmed, S.; Tso, C.P.; Rahman, N.Z.A. An Efficient 3-D Ray Tracing Method: Prediction of Indoor Radio Propagation at 28 GHz in 5G Network. Electron. 2019, 8, 286. [Google Scholar] [CrossRef]
- Qasem, S.A.; Geok, T.K.; Alias, M.Y.; Hossain, F.; Alsowaidi, N. Design and Analysis of Wideband Dielectric Resonator Antenna with Bandwidth and Gain Enhancement for C-Band Applications. Int. Rev. Model. Simul. (IREMOS) 2018, 11, 352. [Google Scholar] [CrossRef]
- Wang, X.; Mao, S.; Pandey, S.; Agrawal, P. CA2T: Cooperative Antenna Arrays Technique for Pinpoint Indoor Localization. Procedia Comput. Sci. 2014, 34, 392–399. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Fei, H.; Xiao, F.; Sheng, B.; Huang, H.; Sun, L. Motion Path Reconstruction in Indoor Environment Using Commodity Wi-Fi. IEEE Trans. Veh. Technol. 2019, 68, 7668–7678. [Google Scholar] [CrossRef]
- Sayeef, S.; Madawala, U.; Handley, P.; Santoso, D. Indoor personnel tracking using infrared beam scanning. In Proceedings of the IEEE Symposium on Position Location and Navigation (PLANS) (IEEE Cat. No. 04CH37556), Monterey, CA, USA, 26–29 April 2004; pp. 698–705. [Google Scholar]
- Kemper, J.; Linde, H. Challenges of passive infrared indoor localization. In Proceedings of the IEEE 5th WPNC’08, Hannover, Germany, 27 March 2008; pp. 63–70. [Google Scholar]
- Khan, L.U. Visible light communication: Applications, architecture, standardization and research challenges. Digit. Commun. Netw. 2017, 3, 78–88. [Google Scholar] [CrossRef]
- Ergul, O.; Dinc, E.; Akan, O.B. Communicate to illuminate: State-of-the-art and research challenges for visible light communications. Phys. Commun. 2015, 17, 72–85. [Google Scholar] [CrossRef]
- Ashhar, K.; Rahim, N.-A.; Khyam, M.O.; Soh, C.B. A Narrowband Ultrasonic Ranging Method for Multiple Moving Sensor Nodes. IEEE Sens. J. 2019, 19, 6289–6297. [Google Scholar] [CrossRef]
- Pasku, V.; De Angelis, A.; Moschitta, A.; Carbone, P.; Nilsson, J.; Dwivedi, S.; Händel, P. A Magnetic Ranging-Aided Dead-Reckoning Positioning System for Pedestrian Applications. IEEE Trans. Instrum. Meas. 2017, 66, 953–963. [Google Scholar] [CrossRef]
- Hehn, M.; Sippel, E.; Carlowitz, C.; Vossiek, M. High-Accuracy Localization and Calibration for 5-DoF Indoor Magnetic Positioning Systems. IEEE Trans. Instrum. Meas. 2019, 68, 4135–4145. [Google Scholar] [CrossRef]
- Pratama, A.R.; Hidayat, R. Smartphone-based Pedestrian Dead Reckoning as an indoor positioning system. In Proceedings of the IEEE International Confernece System Engineering and Technology (ICSET), Bandung, Indonesia, 11–12 September 2012. [Google Scholar]
- Kang, W.; Han, Y. SmartPDR: Smartphone-Based Pedestrian Dead Reckoning for Indoor Localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Pirzada, N.; Nayan, M.Y.; Subhan, F.; Hassan, M.F.; Khan, M.A. Comparative Analysis of Active and Passive Indoor Localization Systems. AASRI Procedia 2013, 5, 92–97. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, J. RFID localization algorithms and applications—A review. J. Intell. Manuf. 2009, 20, 695–707. [Google Scholar] [CrossRef]
- Li, J.-Q.; Feng, G.; Wei, W.; Luo, C.; Cheng, L.; Wang, H.; Song, H.; Ming, Z. PSOTrack: A RFID-Based System for Random Moving Objects Tracking in Unconstrained Indoor Environment. IEEE Internet Things J. 2018, 5, 4632–4641. [Google Scholar] [CrossRef]
- Murofushi, R.; Goncalves, R.; Sousa, A.; Tavares, J.J. Indoor Positioning System Based on the RSSI using Passive Tags. In Proceedings of the IEEE 13rd Latin American Robotics Symposium and 4th Brazilian Robotics Symposium Indoor, Recife, Brazil, 8–12 October 2016; pp. 323–327. [Google Scholar]
- Lo, L.; Li, C. Passive UHF-RFID Localization Based on the Similarity Measurement of Virtual Reference Tags. IEEE Trans. Instrum. Meas. 2019, 68, 2926–2933. [Google Scholar]
- Yang, L.; Cao, J.; Zhu, W.; Tang, S. Accurate and Efficient Object Tracking Based on Passive RFID. IEEE Trans. Mob. Comput. 2015, 14, 2188–2200. [Google Scholar] [CrossRef]
- Ab Razak, A.A.W.; Samsuri, F. Active RFID-based Indoor Positioning System (IPS) for Industrial Environment. In Proceedings of the 2015 IEEE International RF and Microwave Conference (RFM), Kuching, Malaysia, 14–16 December 2015; pp. 89–91. [Google Scholar]
- Chaisang, A.; Promwong, S. Indoor Localization Distance Error Analysis with UWB Wireless Propagation Model Using Positioning Method. In Proceedings of the 2018 International Conference on Digital Arts, Media and Technology (ICDAMT), Phayao, Thailand, 25–28 February 2018; pp. 254–257. [Google Scholar]
- Choliz, J.; Hernández-Solana, Á.; Valdovinos, A. Strategies for Optimizing Latency and Resource Utilization in Multiple Target UWB-based Tracking. In Proceedings of the IEEE Wireless Communication and Networking Conference (WCNC), Cancun, Quintana Roo, Mexico, 28–31 March 2011; pp. 838–843. [Google Scholar]
- Maalek, R.; Sadeghpour, F. Accuracy assessment of ultra-wide band technology in locating dynamic resources in indoor scenarios. Autom. Constr. 2016, 63, 12–26. [Google Scholar] [CrossRef]
- Dickinson, P.; Cielniak, G.; Szymanezyk, O.; Mannion, M. Indoor Positioning of Shoppers Using a Network of Bluetooth Low Energy Beacons. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Mussina, A.; Aubakirov, S. RSSI Based Bluetooth Low Energy Indoor Positioning. In Proceedings of the 2018 IEEE 12th International Conference on Application of Information and Communication Technologies (AICT), Almaty, Kazakhstan, 17–19 October 2018; pp. 1–4. [Google Scholar]
- Giovanelli, D.; Farella, E.; Fontanelli, D.; Macii, D. Bluetooth-Based Indoor Positioning Through ToF and RSSI Data Fusion. In Proceedings of the IEEE International Confernce Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018. [Google Scholar]
- Yan, D.; Kang, B.; Zhong, H.; Wang, R. Research on positioning system based on Zigbee communication. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 1027–1030. [Google Scholar]
- Habaebi, M.H.; Khamis, R.O.; Zyout, A.; Islam, M.R. RSSI Based Localization Techniques for Zigbee Wireless Swensor Network. In Proceedings of the 2014 IEEE International Confernce on Computer and Communication Engineering, Kuala Lumpur, Malaysia, 23–25 September 2014; pp. 72–75. [Google Scholar]
- Alvarez, Y.; Las Heras, F. ZigBee-based Sensor Network for Indoor Location and Tracking Applications. IEEE Lat. Am. Trans. 2016, 14, 3208–3214. [Google Scholar] [CrossRef]
- Chu, C.-H.; Wang, C.-H.; Liang, C.-K.; Ouyang, W.; Cai, J.-H.; Chen, Y.-H. High-Accuracy Indoor Personnel Tracking System with a ZigBee Wireless Sensor Network. In Proceedings of the 2011 Seventh International Conference on Mobile Ad-hoc and Sensor Networks, Beijing, China, 16–18 December 2011; pp. 398–402. [Google Scholar]
- George, J.J.; Mustafa, M.H.; Osman, N.M.; Ahmed, N.H.; Hamed, M. A Survey on Visible Light Communication. Int. J. Eng. Comput. Sci. 2014, 3, 3905–3908. [Google Scholar]
- Piontek, H.; Seyffer, M.; Kaiser, J. Improving the accuracy of ultrasound-based localisation systems. Pers. Ubiquitous Comput. 2006, 11, 439–449. [Google Scholar] [CrossRef]
- Dang, X.; Cheng, Q.; Zhu, H. Indoor Multiple Sound Source Localization via Multi-Dimensional Assignment Data Association. EEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 1944–1956. [Google Scholar] [CrossRef]
- Cai, C.; Hu, M.; Cao, D.; Ma, X.; Li, Q.; Liu, J. Self-Deployable Indoor Localization With Acoustic-Enabled IoT Devices Exploiting Participatory Sensing. IEEE Internet Things J. 2019, 6, 5297–5311. [Google Scholar] [CrossRef]
- Deak, G.; Curran, K.; Condell, J. Device-free Passive Localization using RSSI-based Wireless Network Nodes. In Proceedings of the PGNeT 11th Annual Postgraduate Symposium on the Convergence of Telecommunications, Networking and Broadcasting, Liverpool, UK, 21 June 2010; pp. 241–246. [Google Scholar]
- Pirzada, N.; Nayan, M.Y.; Subhan, F.; Fadzil, M. Device-free Localization Technique for Indoor Detection and Tracking of Human Body: A Survey. Procedia-Soc. Behav. Sci. 2014, 129, 422. [Google Scholar] [CrossRef]
- Kivimäki, T.; Vuorela, T.; Peltola, P.; Vanhala, J. A Review on Device-Free Passive Indoor Positioning Methods. Int. J. Smart Home 2014, 8, 71–94. [Google Scholar] [CrossRef]
- Cruz, C.C.; Costa, J.R.; Fernandes, C.A. Hybrid UHF/UWB Antenna for Passive Indoor Identification and Localization Systems. IEEE Trans. Antennas Propag. 2013, 61, 354–361. [Google Scholar] [CrossRef]
- Zetik, R.; Shen, G.; Thomä, R.S. Evaluation of Requirements for UWB Localization Systems in Home-entertainment Applications. In Proceedings of the IEEE International Confernce Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Zetik, R.; Sachs, J.; Thoma, R. UWB Localization—Active and Passive Approach. In Proceedings of the 21st IEEE Instrumentation and Measurement Technology Confernce, Como, Italy, 18–20 May 2004; pp. 1005–1009. [Google Scholar]
- Wu, Y.; Chen, P.; Gu, F.; Zheng, X.; Shang, J. HTrack: An Efficient Heading-Aided Map Matching for Indoor Localization and Tracking. IEEE Sens. J. 2019, 19, 3100–3110. [Google Scholar] [CrossRef]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A Survey of Enabling Technologies for Network Localization, Tracking, and Navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Davidson, P.; Piche, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- He, S.; Chan, S.-H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2015, 18, 466–490. [Google Scholar] [CrossRef]
- Dong, Y.; Shan, F.; Dou, G.; Cui, Y. The Research and Application of Indoor Location Algorithm Based on Wireless Sensor Network. In Proceedings of the IEEE 3rd International Confernce Communication Software and Networks, Xi’an, China, 27–29 May 2011; pp. 719–722. [Google Scholar]
- Cui, W.; Zhang, L.; Li, B.; Guo, J.; Meng, W.; Wang, H.; Xie, L. Received Signal Strength Based Indoor Positioning Using a Random Vector Functional Link Network. IEEE Trans. Ind. Informatics 2018, 14, 1846–1855. [Google Scholar] [CrossRef]
- Zafari, F.; Member, S.; Papapanagiotou, I.; Member, S. An iBeacon Based Proximity and Indoor Localization System. arXiv 2017, arXiv:1703.07876. [Google Scholar]
- Bharadwaj, R.; Parini, C.; Alomainy, A. Experimental Investigation of 3-D Human Body Localization Using Wearable Ultra-Wideband Antennas. IEEE Trans. Antennas Propag. 2015, 63, 5035–5044. [Google Scholar] [CrossRef]
- Chen, R. A Novel Method for Indoor Location Identification. In Proceedings of the IEEE 2nd International Symposium on Aware Computing, Tainan, China, 1–4 November 2010; pp. 257–262. [Google Scholar]
- Chen, S.W.; Seow, C.K.; Tan, S.Y. Elliptical Lagrange-Based NLOS Tracking Localization Scheme. IEEE Trans. Wirel. Commun. 2016, 15, 3212–3225. [Google Scholar] [CrossRef]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Kulaib, A.R.; Shubair, R.M.; Ng, J.W.P. An Overview of Localization Techniques for Wireless Sensor Networks. In Proceedings of the 2011 International Conference on Innovations in Information Technology, Abu Dhabi, UAE, 25–27 April 2011; pp. 167–172. [Google Scholar]
- Li, Z.; Dimitrova, D.C.; Raluy, D.H.; Braun, T. TDOA for Narrow-band Signal with Low Sampling Rate and Imperfect Synchronization. In Proceedings of the IEEE 7th IFIP Wireless and Mobile Networking Conference (WMNC), Vilamoura, Portugal, 20–24 May 2014. [Google Scholar]
- Want, R.; Wang, W.; Chesnutt, S. Accurate Indoor Location for the IoT. Computer 2018, 51, 66–70. [Google Scholar] [CrossRef]
- Guo, G.; Chen, R.; Ye, F.; Peng, X.; Liu, Z.; Pan, Y. Indoor Smartphone Localization: A Hybrid WiFi RTT-RSS Ranging Approach. IEEE Access 2019, 7, 176767–176781. [Google Scholar] [CrossRef]
- Jathe, N.; Lütjen, M.; Freitag, M. Indoor Positioning in Car Parks by using Wi-Fi Round-Trip-Time to support Finished Vehicle Logistics on Port Terminals. IFAC-PapersOnLine 2019, 52, 857–862. [Google Scholar] [CrossRef]
- Horn, B.K.P. Doubling the Accuracy of Indoor Positioning: Frequency Diversity. Sensors 2020, 20, 1489. [Google Scholar] [CrossRef]
- Peng, R.; Sichitiu, M.L. Angle of Arrival Localization for Wireless Sensor Networks. In Proceedings of the 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 28 September 2006; pp. 374–382. [Google Scholar]
- Silva, B.; Pang, Z.; Akerberg, J.; Neander, J.; Hancke, G. Experimental Study of UWB-based High Precision Localization for Industrial Applications. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 280–285. [Google Scholar]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-dubai, A. Simultaneous Context Inference and Mapping using mm-Wave for Indoor Scenarios. In Proceedings of the IEEE International Confencence on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on AOA and PDOA Using Virtual Stations in Multipath and NLOS Environments for Passive UHF RFID. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Zhang, D.; Xia, F.; Yang, Z.; Yao, L. Localization Technologies for Indoor Human Tracking. In Proceedings of the IEEE 5th International Conference on Future Information Technology, Busan, Korea, 21–23 May 2010. [Google Scholar]
- Bergen, M.H.; Schaal, F.S.; Klukas, R.; Cheng, J.; Holzman, J.F. Toward the implementation of a universal angle-based optical indoor positioning system. Front. Optoelectron. 2018, 11, 116–127. [Google Scholar] [CrossRef]
- Zhu, B.; Cheng, J.; Wang, Y.; Yan, J.; Wang, J. Three-Dimensional VLC Positioning Based on Angle Difference of Arrival with Arbitrary Tilting Angle of Receiver. IEEE J. Sel. Areas Commun. 2017, 36, 8–22. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H.; Al-Naffouri, T.Y.; Alouini, M.-S. A State-of-the-Art Survey on Multidimensional Scaling-Based Localization Techniques. IEEE Commun. Surv. Tutor. 2019, 21, 3565–3583. [Google Scholar] [CrossRef]
- Brás, L.; Carvalho, N.B.; Pinho, P.; Kulas, L.; Nyka, K. A Review of Antennas for Indoor Positioning Systems. Int. J. Antennas Propag. 2012, 2012, 1–14. [Google Scholar] [CrossRef]
- Hafiizh, A.; Imai, F.; Minami, M.; Ikeda, K.; Obote, S.; Kagoshima, K. Study of DOA-based indoor location positioning utilizing MIMO WLAN system in typical room environment. In Proceedings of the ISAP2007, Niigata, Japan, 20–24 August 2007. [Google Scholar]
- Cidronali, A.; Collodi, G.; Maddio, S.; Passafiume, M.; Pelosi, G. 2-D DoA Anchor Suitable for Indoor Positioning Systems Based on Space and Frequency Diversity for Legacy WLAN. IEEE Microw. Wirel. Components Lett. 2018, 28, 627–629. [Google Scholar] [CrossRef]
- Grenier, D.; Elahian, B.; Blanchard-Lapierre, A. Joint delay and direction of arrivals estimation in mobile communications. Signal Image Video Process. 2014, 10, 45–54. [Google Scholar] [CrossRef]
- Scherhaufl, M.; Pichler, M.; Schimback, E.; Muller, D.J.; Ziroff, A.; Stelzer, A. Indoor Localization of Passive UHF RFID Tags Based on Phase-of-Arrival Evaluation. IEEE Trans. Microw. Theory Tech. 2013, 61, 4724–4729. [Google Scholar] [CrossRef]
- Qiu, L.; Li, S.; Huang, Z.; Zhang, S.; Jing, C.; Li, H. Multifrequency Phase Difference of Arrival Range Measurement: Principle, Implementation, and Evaluation. Int. J. Distrib. Sens. Netw. 2015, 11, 715307. [Google Scholar] [CrossRef]
- Dardari, D.; Closas, P.; Djuric, P.M. Indoor Tracking: Theory, Methods, and Technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef]
- Tsai, H.; Chiu, C.; Tseng, P.; Feng, K. Refined Autoencoder-based CSI Hidden Feature Extraction for Indoor Spot Localization. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018. [Google Scholar]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor Localization via Channel Response. ACM Comput. Surv. (CSUR) 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Song, Q.; Guo, S.; Liu, X.; Yang, Y. CSI Amplitude Fingerprinting-Based NB-IoT Indoor Localization. IEEE Internet Things J. 2018, 5, 1494–1504. [Google Scholar] [CrossRef]
- Ma, R.; Yu, G.-J.; Chen, G.; Zhao, S.; Yang, B. Hierarchical CSI-fingerprints Classification for Passive Multi-person Localization. In Proceedings of the 2017 International Conference on Networking and Network Applications, Kathmandu, Nepal, 16–19 October 2017; pp. 112–117. [Google Scholar]
- He, D.; Bouras, T.; Chen, X.; Yu, W.; Zhang, Y.; Yang, Y. 3-D Spatial Spectrum Fusion Indoor Localization Algorithm Based on CSI-UCA Smoothing Technique. IEEE Access 2018, 6, 59575–59588. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based Fingerprinting for Indoor Localization: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2016, 66, 1. [Google Scholar] [CrossRef]
- Samadh, S.A.; Liu, Q.; Liu, X.; Ghourchian, N.; Allegue, M. Indoor Localization Based on Channel State Information. In Proceedings of the 2019 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Orlando, FL, USA, 20–23 January 2019. [Google Scholar]
- Tong, X.; Li, H.; Tian, X.; Wang, X. Triangular Antenna Layout Facilitates Deployability of CSI Indoor Localization Systems. In Proceedings of the 2019 16th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Boston, MA, USA, 10–13 June 2019. [Google Scholar]
- Kui, W.; Mao, S.; Hei, X.; Li, F. Towards Accurate Indoor Localization using Channel State Information. In Proceedings of the IEEE International Confernce Consumer Electronics-Taiwan (ICCE-TW), Taichung, Taiwan, 19–21 May 2018. [Google Scholar]
- Poosamani, N.; Rhee, I. Towards a practical indoor location matching system using 4G LTE PHY layer information. In Proceedings of the 2015 IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), St. Louis, MO, USA, 23–27 March 2015; pp. 284–287. [Google Scholar]
- Kim, B.; Kwak, M.; Lee, J.; Kwon, T.T. A Mulit-proned Approach for indoor Positioning with Wi-Fi, Magnetic and Cellular Signals. In Proceedings of the International Confernce on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 723–726. [Google Scholar]
- Hsieh, H.-Y.; Prakosa, S.W.; Leu, J.-S. Towards the Implementation of Recurrent Neural Network Schemes for WiFi Fingerprint-Based Indoor Positioning. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018. [Google Scholar]
- Ding, N.; Wagner, D.; Chen, X.; Pathak, A.; Hu, Y.C.; Rice, A. Characterizing and modeling the impact of wireless signal strength on smartphone battery drain. ACM Sigmetrics Perform. Eval. Rev. 2013, 41, 29–40. [Google Scholar] [CrossRef]
- Sosa-Sesma, S.; Perez-Navarro, A. Fusion System Based on Wi-Fi and Ultrasounds for In-home Positioning Systems: The UTOPIA. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Molina, B.; Olivares, E.; Palau, C.; Esteve, M. A Multimodal Fingerprint-Based Indoor Positioning System for Airports. IEEE Access 2018, 6, 10092–10106. [Google Scholar] [CrossRef]
- Thuong, N.T.; Phong, H.T.; Do, D.; van Hieu, P.; Loc, D.T. Android Application for Wi-Fi Based Indoor Position: System Design and Performance Analysis. In Proceedings of the 2016 International Conference on Information Networking (ICOIN), Kota Kinabalu, Malaysia, 13–15 January 2016; pp. 416–419. [Google Scholar]
- Shi, S.; Sigg, S.; Chen, L.; Ji, Y. Accurate Location Tracking From CSI-Based Passive Device-Free Probabilistic Fingerprinting. IEEE Trans. Veh. Technol. 2018, 67, 5217–5523. [Google Scholar] [CrossRef]
- Cidronali, A.; Maddio, S.; Giorgetti, G.; Manes, G. Analysis and Performance of a Smart Antenna for 2.45-GHz Single-Anchor Indoor Positioning. IEEE Trans. Microw. Theory Tech. 2010, 58, 21–31. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, S.; Chen, C.L.P. TOA-Based Passive Localization in Quasi-Synchronous Networks. IEEE Commun. Lett. 2014, 18, 592–595. [Google Scholar] [CrossRef]
- Ren, J.; Wang, Y.; Niu, C.; Song, W.; Huang, S. A Novel Clustering Algorithm for Wi-Fi Indoor Positioning. IEEE Access 2019, 7, 122428–122434. [Google Scholar] [CrossRef]
- Ren, J.; Wang, Y.; Niu, C.; Song, W.; Yunan, W.; Changliu, N.; Wei, S. A Novel High Precision and Low Consumption Indoor Positioning Algorithm for Internet of Things. IEEE Access 2019, 7, 86874–86883. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.; Li, W.; Tao, X.; Zhang, P. ConFi: Convolutional Neural Networks Based Indoor Wi-Fi Localization Using Channel State Information. IEEE Access 2017, 5, 18066–18074. [Google Scholar] [CrossRef]
- Jaffe, A.; Wax, M. Single-Site Localization via Maximum Discrimination Multipath Fingerprinting. IEEE Trans. Signal Process. 2014, 62, 1718–1728. [Google Scholar] [CrossRef]
- Yu, N.; Zhan, X.; Zhao, S.; Wu, Y.; Feng, R. A Precise Dead Reckoning Algorithm Based on Bluetooth and Multiple Sensors. IEEE Internet Things J. 2018, 5, 336–351. [Google Scholar] [CrossRef]
- Chowdhury, T.I.; Rahman, M.M.; Parvez, S.; Alam, A.K.M.M.; Basher, A.; Alam, A. A Multi-step Approach for RSSI-Based Distance Estimation Using Smartphones. In Proceedings of the 2015 International Conference on Networking Systems and Security (NSysS), Dhaka, Bangladesh, 5–7 January 2015. [Google Scholar]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Li, G.; Geng, E.; Ye, Z.; Xu, Y.; Zhu, H. An Indoor Positioning Algorithm Based on RSSI Real-time Correction. In Proceedings of the 2018 14th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 12–16 August 2018; pp. 129–133. [Google Scholar]
- Feng, Z.; Mo, L.; Li, M. Analysis of Low Energy Consumption Wireless Sensor with BLE. In Proceedings of the IEEE SENSORS, Busan, Korea, 1–4 November 2015. [Google Scholar]
- Liu, D.-Y.; Wang, C.-S.; Hsu, K.-S. Beacon applications in information services. In Proceedings of the 2016 International Conference on Advanced Materials for Science and Engineering (ICAMSE), Tainan, Taiwan, 12–13 November 2016; pp. 438–440. [Google Scholar]
- Sou, S.-I.; Lin, W.-H.; Lan, K.-C.; Lin, C.-S. Indoor Location Learning Over Wireless Fingerprinting System With Particle Markov Chain Model. IEEE Access 2019, 7, 8713–8725. [Google Scholar] [CrossRef]
- Paek, J.; Ko, J.; Shin, H. A Measurement Study of BLE iBeacon and Geometric Adjustment Scheme for Indoor Location-Based Mobile Applications. Mob. Inf. Syst. 2016, 2016, 1–13. [Google Scholar] [CrossRef]
- Sthapit, P.; Gang, H.-S.; Pyun, J.-Y.; Pyurr, J.-Y. Bluetooth Based Indoor Positioning Using Machine Learning Algorithms. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics—Asia (ICCE-Asia), Jeju, Korea, 24–26 June 2018; pp. 206–212. [Google Scholar]
- Jeon, J.; Kong, Y.; Nam, Y. An Indoor Positioning System using Bluetooth RSSI with an Accelerometer and a Barometer on a Smartphone. In Proceedings of the 2015 10th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Krakow, Poland, 4–6 November 2015; pp. 528–531. [Google Scholar]
- Leong, C.Y.; Perumal, T.; Yaakob, R.; Peng, K.W. Enhancing Indoor Positioning Service for Location Based Internet of Thinngs (IOT): A Source Selecting Approach with Error Compensation. In Proceedings of the IEEE International Symposium on Consumer Electronics (ISCE), Kuala Lumpur, Malaysia, 14–15 November 2017; pp. 52–55. [Google Scholar]
- Chen, W.-C.; Kao, K.-F.; Chang, Y.-T.; Chang, C.-H. An RSSI-based distributed real-time indoor positioning framework. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 1288–1291. [Google Scholar]
- Jianyong, Z.; Haiyong, L.; Zili, C.; Zhaohui, L. RSSI Based Bluetooth Low Energy Indoor Positioning. In Proceedings of the IEEE International Confernce on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 526–533. [Google Scholar]
- Dong, Z.; Mengjiao, C.; Wenjuan, L. Implementation of indoor fingerprint positioning based on ZigBee. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 2654–2659. [Google Scholar]
- Torat, K.; Promwong, S. Extension of Quadratic Means for Weighted Centroid Localization with ZigBee Technology. In Proceedings of the 2017 21st International Computer Science and Engineering Conference (ICSEC), Bangkok, Thailand, 15–18 November 2017. [Google Scholar]
- Barrau, F.; Paille, B.; Kussener, E.; Goguenheim, D. Distance measurement using narrowband ZigBee devices. In Proceedings of the 2014 23rd Wireless and Optical Communication Conference (WOCC), Newark, NJ, USA, 9–10 May 2014. [Google Scholar]
- Huircán, J.I.; Muñoz, C.; Young, H.; Von Dossow, L.; Bustos, J.; Vivallo, G.; Toneatti, M. ZigBee-based wireless sensor network localization for cattle monitoring in grazing fields. Comput. Electron. Agric. 2010, 74, 258–264. [Google Scholar] [CrossRef]
- Chuenurajit, T.; Phimmasean, S.; Cherntanomwong, P. Robustness of 3D indoor localization based on fingerprint technique in wireless sensor networks. In Proceedings of the 2013 10th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Krabi, Thailand, 15–17 May 2013. [Google Scholar]
- Gharghan, S.K.; Nordin, R.; Ismail, M. Statistical Validation of Performance of ZigBee-based Wireless Sensor Network for Track Cycling. In Proceedings of the International Conference on Smart Sensors and Applications, Kuala Lumpur, Malaysia, 26–28 May 2015; pp. 44–49. [Google Scholar]
- Mhamdi, J.; El Abkari, S. Contriving an RFID system for Alzheimer patients tracking. In Proceedings of the 2015 Third International Workshop on RFID and Adaptive Wireless Sensor Networks (RAWSN), Agadir, Morocco, 13–15 May 2015; pp. 23–28. [Google Scholar]
- Lee, W.C.; Hung, F.H.; Tsang, K.F.; Wu, C.K.; Chi, H.R. RSS-based localization algorithm for indoor patient tracking. In Proceedings of the 2016 IEEE 14th International Conference on Industrial Informatics (INDIN), Poitiers, France, 19–21 July 2016; pp. 1060–1064. [Google Scholar]
- Ros, M.; Schoots, B.; D’Souza, M. Using context-aware sub sorting of received signal strength fingerprints for indoor localisation. In Proceedings of the 2012 6th International Conference on Signal Processing and Communication Systems, Gold Coast, Australia, 12–14 December 2012. [Google Scholar]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 26 March 2003. [Google Scholar]
- Hasani, M.; Talvitie, J.; Sydanheimo, L.; Lohan, E.S.; Ukkonen, L. Hybrid WLAN-RFID Indoor Localization Solution Utilizing Textile Tag. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1. [Google Scholar] [CrossRef]
- Bartoletti, S.; DeCarli, N.; Dardari, D.; Chiani, M.; Conti, A. Order-of-Arrival of Tagged Objects. IEEE J. Radio Freq. Identif. 2018, 2, 185–196. [Google Scholar] [CrossRef]
- Li, N.; Becerik-Gerber, B. Performance-based evaluation of RFID-based indoor location sensing solutions for the built environment. Adv. Eng. Inform. 2011, 25, 535–546. [Google Scholar] [CrossRef]
- Papapostolou, A.; Chaouchi, H. RFID-assisted indoor localization and the impact of interference on its performance. J. Netw. Comput. Appl. 2011, 34, 902–913. [Google Scholar] [CrossRef]
- Reza, A.W.; Geok, T.K.; Dimyati, K. Tracking via Square Grid of RFID Reader Positioning and Diffusion Algorithm. Wirel. Pers. Commun. 2010, 61, 227–250. [Google Scholar] [CrossRef]
- Reza, A.W.; Geok, T.K. Objects Tracking in A Dense reader Environment Utilising Grids of RFID Antenna Poitioning. Int. J. Electron. 2009, 96, 1281–1307. [Google Scholar] [CrossRef]
- Hanssens, B.; Plets, D.; Tanghe, E.; Oestges, C.; Gaillot, D.P.; Lienard, M.; Li, T.; Steendam, H.; Martens, L.; Joseph, W. An Indoor Variance-Based Localization Technique Utilizing the UWB Estimation of Geometrical Propagation Parameters. IEEE Trans. Antennas Propag. 2018, 66, 2522–2533. [Google Scholar] [CrossRef]
- Mahfouz, M.R.; Kuhn, M.J. UWB Channel Measurements and Modeling for Positioning and Communications Systems in the Operating Room. In Proceedings of the 2011 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems, Phoenix, AZ, USA, 16–19 January 2011; pp. 47–50. [Google Scholar]
- Bharadwaj, R.; Swaisaenyakorn, S.; Parini, C.G.; Batchelor, J.C.; Alomainy, A. Impulse Radio Ultra-Wideband Communications for Localization and Tracking of Human Body and Limbs Movement for Healthcare Applications. IEEE Trans. Antennas Propag. 2017, 65, 7298–7309. [Google Scholar] [CrossRef]
- Mekonnen, Z.W.; Slottke, E.; Luecken, H.; Steiner, C.; Wittneben, A. Constrained maximum likelihood positioning for UWB based human motion tracking. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Hernandez, A.; Badorrey, R.; Chóliz, J.; Alastruey, I.; Valdovinos, A. Accurate indoor wireless location with IR UWB systems a performance evaluation of joint receiver structures and TOA based mechanism. IEEE Trans. Consum. Electron. 2008, 54, 381–389. [Google Scholar] [CrossRef]
- Mahfouz, M.R.; Zhang, C.; Merkl, B.C.; Kuhn, M.; Fathy, A. Investigation of High-Accuracy Indoor 3-D Positioning Using UWB Technology. IEEE Trans. Microw. Theory Tech. 2008, 56, 1316–1330. [Google Scholar] [CrossRef]
- Kim, H.J.; Xie, Y.; Yang, H.; Lee, C.; Song, T.L. An Efficient Indoor Target Tracking Algorithm Using TDOA Measurements with Applications to Ultra-Wideband Systems. IEEE Access 2019, 7, 91435–91445. [Google Scholar] [CrossRef]
- Selimis, G.; Romme, J.; Pflug, H.; Philips, K.; Dolmans, G.; De Groot, H. Sub-meter UWB localization: Low complexity design and evaluation in a real localization system. In Proceedings of the 2013 IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), London, UK, 8–11 September 2013; pp. 186–191. [Google Scholar]
- Sang, C.L.; Adams, M.; Korthals, T.; Hormann, T.; Hesse, M.; Ruckert, U. A Bidirectional Object Tracking and Navigation System using a True-Range Multilateration Method. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019. [Google Scholar]
- Gezici, S.; Poor, H.V. Position Estimation via Ultra-Wide-Band Signals. Proc. IEEE 2009, 97, 386–403. [Google Scholar] [CrossRef]
- Tian, Q.; Wang, K.I.-K.; Salcic, Z. Human Body Shadowing Effect on UWB-Based Ranging System for Pedestrian Tracking. IEEE Trans. Instrum. Meas. 2019, 68, 4028–4037. [Google Scholar] [CrossRef]
- Xu, Y.; Ahn, C.K.; Shmaliy, Y.S.; Chen, X.; Li, Y. Adaptive Robust INS / UWB-integrated Human Tracking Using UFIR Filter Bank. Measurement 2018, 123, 1–7. [Google Scholar] [CrossRef]
- Pei, D.; Gong, J.; Xu, X. An HMM-Based Localization Scheme Using Adaptive Forward Algorithm for LTE Networks. In Proceedings of the 2018 10th International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 18–20 October 2018. [Google Scholar]
- Rastorgueva-foi, E.; Koivisto, M.; Lepp, K. Dynamic Beam Selection for Beam-RSRP Based Direction Finding in mmW 5G Networks. In Proceedings of the IEEE International Confernce Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018. [Google Scholar]
- Mirowski, P.; Ho, T.K.; Yi, S.; Macdonald, M. SignalSLAM: Simultaneous localization and mapping with mixed WiFi, Bluetooth, LTE and magnetic signals. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013. [Google Scholar]
- Varshavsky, A.; De Lara, E.; Hightower, J.; Lamarca, A.; Otsason, V. GSM indoor localization. Pervasive Mob. Comput. 2007, 3, 698–720. [Google Scholar] [CrossRef]
- Laitinen, H.; Lahteenmaki, J.; Nordstrom, T. Database Correlation Method for GSM Location. In Proceedings of the IEEE VTS 53rd Vehicular Technology Conference, Rhodes, Greece, 6–9 May 2001; Volume 4, pp. 2504–2508. [Google Scholar]
- Rastorgueva-foi, E.; Koivisto, M.; Lepp, K. User Positioning in mmW 5G Networks using Beam-RSRP Measurements and Kalman Filtering. In Proceedings of the IEEE 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1150–1156. [Google Scholar]
- Driusso, M.; Marshall, C.; Sabathy, M.; Knutti, F.; Mathis, H.; Babich, F. Indoor Positioning Using LTE Signals. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Liu, C.; Tian, Z.; Zhou, M.; Yang, X. Gene-Sequencing-Based Indoor Localization in Distributed Antenna System. IEEE Sens. J. 2017, 17, 6019–6028. [Google Scholar] [CrossRef]
- Loyez, C.; Bocquet, M.; Lethien, C.; Rolland, N. A Distributed Antenna System for Indoor Accurate WiFi Localization. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1184–1187. [Google Scholar] [CrossRef]
- Seco-granados, G.; Crosta, P.; Zanier, F.; Crisci, M. Downlink Synchronization of LTE Base Stations for Opportunistic ToA Positioning. In Proceedings of the IEEE International Confernece on Location and GNSS (ICL-GNSS), Gothenburg, Sweden, 24–25 June 2015. [Google Scholar]
- Ficco, M.; Palmieri, F.; Castiglione, A. Hybrid indoor and outdoor location services for new generation mobile terminals. Pers. Ubiquitous Comput. 2014, 18, 271–285. [Google Scholar] [CrossRef]
- Pu, C.; Pu, C.; Lee, H. Indoor Location Tracking using Received Signal Strength Indicator. Emerg. Commun. Wirel. Sensor Netw. 2011. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Member, S.; Niemegeers, I. Wireless Personal Networks. IEEE Commun. Surv. Tuts. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Danijel, Č.; Gruji, I.; Pavlovi, P. Comparative Analysis of the Bluetooth Low-Energy Indoor Positioning Systems. In Proceedings of the 2015 12th International Conference on Telecommunication in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 14–17 October 2015; pp. 76–79. [Google Scholar]
- Chabbar, H.; Chami, M. Indoor Localization using Wi-Fi Method Based on Fingerprinting Technique. In Proceedings of the 2017 International Conference on Wireless Technologies, Embedded and Intelligent Systems (WITS), Fez, Morocco, 19–20 April 2017. [Google Scholar]
- Wei, T.; Bell, S. Indoor Localization Method Comparison: Fingerprinting and Trilateration Algorithm; University of Saskatchewan: Saskatoon, SK, Canada, 2011. [Google Scholar]
- Langendoen, K.; Reijers, N. Distributed localization in wireless sensor networks: A quantitative comparison. Comput. Netw. 2003, 43, 499–518. [Google Scholar] [CrossRef]
- Yang, J.; Lee, H.; Moessner, K. Multilateration Localization Based on Singular Value Decomposition for 3D Indoor Positioning. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Alkasi, H.P.P.U.; Shayokh, M.D.A.L. An Experimental Comparison Study on Indoor Localization: RF Fingerprinting and Multilateration Methods. In Proceedings of the 2013 International Conference on Electronics, Computer and Computation (ICECCO), Ankara, Turkey, 7–9 November 2013; pp. 255–259. [Google Scholar]
- Miwa, N.; Tagashira, S.; Matsuda, H.; Tsutsui, T.; Arakawa, Y.; Fukuda, A. A Multilateration-based Localization Scheme for Adhoc Wireless Positioning Networks used in Information-oriented Construction. In Proceedings of the 2013 IEEE 27th International Conference on Advanced Information Networking and Applications (AINA), Barcelona, Spain, 25–28 March 2013; pp. 690–695. [Google Scholar]
- Luo, X.; O’Brien, W.J.; Julien, C.L. Comparative evaluation of Received Signal-Strength Index (RSSI) based indoor localization techniques for construction jobsites. Adv. Eng. Inform. 2011, 25, 355–363. [Google Scholar] [CrossRef]
- Chuenurajit, T.; Suroso, D.; Cherntanomwong, P. Implementation of RSSI-Based 3D Indoor Localization using Wireless Sensor Networks Based on ZigBee Standard. J. Inf. Sci. Technol. 2012, 3, 1–6. [Google Scholar]
- Robles, J.J.; Pola, J.S.; Lehnert, R. Extended Min-Max algorithm for position estimation in sensor networks. In Proceedings of the 2012 9th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 15–16 March 2012; pp. 47–52. [Google Scholar]
- Blumenthal, J.; Grossmann, R.; Golatowski, F.; Timmermann, D. Weighted Centroid Localization in Zigbee-based Sensor Networks. In Proceedings of the 2007 IEEE International Symposium on Intelligent Signal Processing, Alcala de Henares, Spain, 3–5 October 2007. [Google Scholar]
- Goldoni, E.; Savioli, A.; Risi, M.; Gamba, P. Experimental analysis of RSSI-based indoor localization with IEEE 802.15.4. In Proceedings of the 2010 European Wireless Conference (EW), Lucca, Italy, 12–15 April 2010; pp. 71–77. [Google Scholar]
- Sugano, M.; Murata, M. Indoor Localization System using RSSI Measurement of Wireless Sensor Network Based on ZigBee Standard. Wirel. Opt. Commun. 2006, 538, 1–6. [Google Scholar]
- Desai, J.; Tureli, U. Evaluating Performance of Various Localization Algorithms in Wireless and Sensor Networks. In Proceedings of the 2007 IEEE 18th International Symposium on Personal, Indoor and Mobile Radio Communications, Athens, Greece, 3–7 September 2007. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000. Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Youssef, M.A.; Agrawala, A.; Shankar, A.U. WLAN Location Determination via Clustering and Probability Distributions. In Proceedings of the 1st IEEE International Confernce on Pervasive Computing and Communications, (PerCom), Fort Worth, TX, USA, 23–26 March 2003; pp. 143–150. [Google Scholar]
- Chang, N.; Rashidzadeh, R.; Ahmadi, M. Robust indoor positioning using differential wi-fi access points. IEEE Trans. Consum. Electron. 2010, 56, 1860–1867. [Google Scholar] [CrossRef]
- Sun, T.; Zheng, L.; Peng, A.; Tang, B.; Ou, G. Building information aided Wi-Fi fingerprinting positioning system. Comput. Electr. Eng. 2018, 71, 558–568. [Google Scholar] [CrossRef]
- Yiu, S.; Dashti, M.; Claussen, H.; Perez-Cruz, F. Wireless RSSI fingerprinting localization. Signal Process. 2017, 131, 235–244. [Google Scholar] [CrossRef]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-Signal-Strength-Based Indoor Positioning Using Compressive Sensing. IEEE Trans. Mob. Comput. 2012, 11, 1983–1993. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Zhao, Y.; Liu, Y.; Cuthbert, L. Bluetooth positioning using RSSI and triangulation methods. In Proceedings of the 2013 IEEE 10th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2013; pp. 837–842. [Google Scholar]
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services—MobiSys ’05; Association for Computing Machinery (ACM): New York, NY, USA, 2005. [Google Scholar]
- Youssef, M.; Agrawala, A. Continuous space estimation for WLAN location determination systems. In Proceedings of the 13th International Conference on Computer Communications and Networks, Chicago, IL, USA, 11–13 October 2004; pp. 161–166. [Google Scholar]
- Nuño-Barrau, G.; Páez-Borrallo, J.M. A New Location Estimation System for Wireless Networks Based on Linear Discriminant Functions and Hidden Markov Model. EURASIP J. Adv. Signal Process. 2006, 2006, 068154. [Google Scholar] [CrossRef]
- Wul, C.; Fu, L.; Lianz, F. WLAN Location Determination in e-Home via Support Vector Classification. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, Taipei, Taiwan, 21–23 March 2004; pp. 1026–1031. [Google Scholar]
- Youssef, M.; Abdallah, M.; Agrawala, A. Multivariate Analysis for Probabilistic WLAN Location Determination Systems. In Proceedings of the 2nd Annual International Confernce on Mobile and Ubiquitous Systems: Networking and Services, San Diego, CA, USA, 17–21 July 2005; pp. 353–362. [Google Scholar]
- Van Der Merwe, R.; Wan, E. Gaussian mixture sigma-point particle filters for sequential probabilistic inference in dynamic state-space models. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, Hong Kong, China, 6–10 April 2003; Volume 6, pp. 701–704. [Google Scholar]
- Ramachandran, A.; Jagannathan, S. Spatial Diversity in Signal Strength based WLAN Location Determination Systems. In Proceedings of the IEEE 32nd Conference on Local Computer Networks (LCN 2007), Dublin, Ireland, 15–18 October 2007; pp. 10–17. [Google Scholar]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piche, R. A comparative survey of WLAN location fingerprinting methods. In Proceedings of the 2009 6th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 19 March 2009; pp. 243–251. [Google Scholar]
- Figuera, C.; Rojo-Álvarez, J.L.; Wilby, M.; Mora-Jiménez, I.; Caamaño-Fernández, A.J. Advanced support vector machines for 802.11 indoor location. Signal Process. 2012, 92, 2126–2136. [Google Scholar] [CrossRef]
- Mirowski, P.; Milioris, D.; Whiting, P.; Ho, T.K. Probabilistic Radio-Frequency Fingerprinting and Localization on the Run. Bell Labs Tech. J. 2014, 18, 111–133. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. Handling Samples Correlation in the Horus System. In Proceedings of the IEEE INFOCOM, Hong Kong, China, 7–11 March 2004; Volume 2, pp. 1023–1031. [Google Scholar]
- Youssef, M.; Agrawala, A. Small-scale Compensation for WLAN Location Determination Systems. In Proceedings of the 2003 IEEE Wireless Communications and Networking, New Orleans, LA, USA, 16–20 March 2003; Volume 3, pp. 1974–1978. [Google Scholar]
- Bisio, I.; Lavagetto, F.; Marchese, M.; Sciarrone, A. Energy Efficient Wi-Fi-based Fingerprinting for Indoor Positioning with Smartphones. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 4639–4643. [Google Scholar]
- Wu, C.; Yang, Z.; Liu, Y. Smartphones Based Crowdsourcing for Indoor Localization. IEEE Trans. Mob. Comput. 2015, 14, 444–457. [Google Scholar] [CrossRef]
- Li, T.; Chen, Y.; Zhang, R.; Zhang, Y.; Hedgpeth, T. Secure Crowdsourced Indoor Positioning Systems. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; pp. 1034–1042. [Google Scholar]
- Ma, L.; Fan, Y.; Xu, Y.; Cui, Y. Pedestrian Dead Reckoning Trajectory Matching Method for Radio Map Crowdsourcing Building in Wi-Fi Indoor Positioning System. In Proceedings of the IEEE International Confencence on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Li, Z.; Zhao, X.; Liang, H. Automatic Construction of Radio Maps by Crowdsourcing PDR Traces for Indoor Positioning. In Proceedings of the IEEE International Confencence on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018. [Google Scholar]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W. A Robust Crowdsourcing-based Indoor Localization System. Sensors 2017, 17, 864. [Google Scholar] [CrossRef]
- Jung, S.-H.; Han, D. Automated Construction and Maintenance of Wi-Fi Radio Maps for Crowdsourcing-Based Indoor Positioning Systems. IEEE Access 2017, 6, 1764–1777. [Google Scholar] [CrossRef]
- Yang, S.; Dessai, P.; Verma, M.; Gerla, M. FreeLoc: Calibration-free crowdsourced indoor localization. In Proceedings of the 2013 Proceedings IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 2481–2489. [Google Scholar]
- Yu, N.; Zhao, S.; Ma, X.; Wu, Y.; Feng, R. Effective Fingerprint Extraction and Positioning Method Based on Crowdsourcing. IEEE Access 2019, 7, 162639–162651. [Google Scholar] [CrossRef]
- Ferris, B.; Fox, D.; Lawrence, N.D. Wi-Fi-SLAM using Gaussian Process Latent Variable Models. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI); Hyderabad, India, 6–12 January 2007; Volume 7, pp. 2480–2485. [Google Scholar]
- Huang, J.; Millman, D.; Quigley, M.; Stavens, D.; Thrun, S.; Aggarwal, A. Efficient, generalized indoor WiFi GraphSLAM. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1038–1043. [Google Scholar]
- Robertson, P.; Angermann, M.; Krach, B. Simultaneous localization and mapping for pedestrians using only foot-mounted inertial sensors. In Proceedings of the 11th International Conference on Ubiquitous Computing, Orlando, FL, USA, 30 September–3 October 2009; pp. 93–96. [Google Scholar]
- Bruno, L.; Robertson, P. WiSLAM: Improving FootSLAM with WiFi. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimarães, Portugal, 21–23 September 2011; pp. 1–10. [Google Scholar]
- Robertson, P.; Angermann, M.; Khider, M. Improving Simultaneous Localization and Mapping for pedestrian navigation and automatic mapping of buildings by using online human-based feature labeling. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 365–374. [Google Scholar]
- Choset, H.; Nagatani, K. Topological simultaneous localization and mapping (SLAM): Toward exact localization without explicit localization. IEEE Trans. Robot. Autom. 2001, 17, 125–137. [Google Scholar] [CrossRef]
- Guivant, J.E.; Nebot, E.M. Optimization of the simultaneous localization and map-building algorithm for real-time implementation. IEEE Trans. Robot. Autom. 2001, 17, 242–257. [Google Scholar] [CrossRef]
- Leitinger, E.; Meyer, F.; Tufvesson, F.; Witrisal, K. Factor Graph Based Simultaneous Localization and Mapping Using Multipath Channel Information. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–25 May 2017; pp. 652–658. [Google Scholar]
- Naseri, H.; Koivunen, V. Cooperative simultaneous localization and mapping by exploiting multipath propagation. IEEE Trans. Signal Process. 2016, 65, 200–211. [Google Scholar] [CrossRef]
- Shin, H.; Cha, H. Wi-Fi Fingerprint-Based Topological Map Building for Indoor User Tracking. In Proceedings of the 2010 IEEE 16th International Conference on Embedded and Real-Time Computing Systems and Applications, Macau, China, 23–25 August 2010; pp. 105–113. [Google Scholar]
- Shao-Wen, Y.; Yang, X.; Yang, L. Simultaneous Localization and Mappinng Using Spatial and Temporal Coherence for Indoor Location. U.S. Patent No. 9,288,632 B2, 15 March, 2016. [Google Scholar]
- Salamah, A.H.; Tamazin, M.; Sharkas, M.A.; Khedr, M. An Enhanced Wi-Fi Indoor Localization System Based on Machine Learning. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Bozkurt, S.; Elibol, G.; Gunal, S.; Yayan, U. A comparative study on machine learning algorithms for indoor positioning. In Proceedings of the 2015 International Symposium on Innovations in Intelligent SysTems and Applications (INISTA), Madrid, Spain, 2–4 September 2015. [Google Scholar]
- Sabanci, K.; Yigit, E.; Ustun, D.; Toktas, A.; Aslan, M.F. WiFi Based Indoor Localization: Application and Comparison of Machine Learning Algorithms. In Proceedings of the 2018 XXIII International Seminar/Workshop on Direct and Inverse Problems of Electromagnetic and Acoustic Wave Theory (DIPED), Tbilisi, Georgia, 24 September 2018; pp. 246–251. [Google Scholar]
- Zhao, J.; Wang, J. WiFi indoor positioning algorithm based on machine learning. In Proceedings of the 2017 7th IEEE International Conference on Electronics Information and Emergency Communication (ICEIEC), Macau, China, 21–23 July 2017. [Google Scholar]
- Lian, L.; Xia, S.; Zhang, S.; Wu, Q.; Jing, C. Improved Indoor positioning algorithm using KPCA and ELM. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019. [Google Scholar]
- Lu, X.; Yu, C.; Zou, H.; Jiang, H.; Xie, L. Extreme learning machine with dead zone and its application to WiFi based indoor positioning. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10 December 2014; pp. 625–630. [Google Scholar]
- Zou, H.; Jiang, H.; Lu, X.; Xie, L. An Online Sequential Extreme Learning Machine Approach To Wi-Fi Based Indoor Positioning. In Proceedings of the IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 4 March 2014; pp. 111–116. [Google Scholar]
- Zou, H.; Lu, X.; Jiang, H.; Xie, L. A Fast and Precise Indoor Localization Algorithm Based on an Online Sequential Extreme Learning Machine. Sensors 2015, 15, 1804–1824. [Google Scholar] [CrossRef]
- Qi, G.; Jin, Y.; Yan, J. RSSI-based Floor Localization Using Principal Component Analysis and Ensemble Extreme Learning Machine Technique. In Proceedings of the 2018 IEEE 23rd International Conference on Digital Signal Processing (DSP), Shanghai, China, 19 November 2018. [Google Scholar]
- Liang, X.; Gou, X.; Liu, Y. Fingerprinting-based Location Positioning. In Proceedings of the IEEE International Conference on Network Infrastructure and Digital Content (IC-NIDC), Beijing, China, 21–23 September 2012; pp. 57–61. [Google Scholar]
- Zhang, W.; Hua, X.; Yu, K.; Qiu, W.; Zhang, S. Domain Clustering Based Wi-Fi Indoor Positioning Algorithm. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Subedi, S.; Pyun, J.-Y. Practical Fingerprinting Localization for Indoor Positioning System by Using Beacons. J. Sens. 2017, 2017, 1–16. [Google Scholar] [CrossRef]
- MacHaj, J.; Brida, P.; Piché, R. Rank Based Fingerprinting Algorithm for Indoor Positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011. [Google Scholar]
- Del Mundo, L.B.; Macatangga, R.S. Hybrid classifier for Wi-Fi fingerprinting system. In Proceedings of the 2012 International Conference on ICT Convergence (ICTC), Jeju Island, Korea, 15–17 October 2012; pp. 107–112. [Google Scholar]
- Badawy, O.M.; Hasan, M.A.B. Decision Tree Approach to Estimate User Location in WLAN Based on Location Fingerprinting. In Proceedings of the 2007 National Radio Science Conference, Cairo, Egypt, 13–15 March 2007. [Google Scholar]
- Koo, B.; Lee, S.; Lee, M.; Lee, D.; Lee, S.; Kim, S. PDR/Fingerprinting Fusion Indoor Location Tracking Using RSS Recovery and Clustering. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 699–704. [Google Scholar]
- Razavi, A.; Valkama, M.; Lohan, E.S. K-means Fingerprint Clustering for Low-Complexity Floor Estimation in Indoor Mobile Localization. In Proceedings of the IEEE Globecom Workshop, San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Altintas, B.; Serif, T. Improving RSS-Based Indoor Positioning Algorithm Via K-Means Clustering. In Proceedings of the IEEE 17th European Wireless 2011—Sustainable Wireless Technologies, Vienna, Austria, 27–29 April 2011. [Google Scholar]
- Sun, Y.; Xu, Y.; Ma, L.; Deng, Z. KNN-FCM hybrid algorithm for indoor location in WLAN. In Proceedings of the 2009 2nd International Conference on Power Electronics and Intelligent Transportation System (PEITS), Shenzhen, China, 19–20 December 2009; Volume 2, pp. 251–254. [Google Scholar]
- Lee, C.W.; Lin, T.N.; Fang, S.H.; Chou, Y.C. A Novel Clustering-Based Approach of Indoor Location Fingerprinting. In Proceedings of the 2013 IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), London, UK, 8–11 September 2013; pp. 3191–3196. [Google Scholar]
- Phillips, S.; Katchabaw, M.; Lutfiyya, H. WLocator: An Indoor Positioning System. In Proceedings of the Third IEEE International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob 2007), White Plains, NY, USA, 8–10 October 2007. [Google Scholar]
- Wang, H.; Zhao, Z.; Hu, J.; Qu, Z.; Feng, H. Study on Improvement of Fingerprint Matching Algorithm in Wireless LAN Based Indoor Positioning System. In Proceedings of the 2016 17th IEEE/ACIS International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD), Shanghai, China, 30 May–1 June 2016; pp. 275–280. [Google Scholar]
- Yeh, S.-C.; Hsu, W.-H.; Lin, W.-Y.; Wu, Y.-F. Study on an Indoor Positioning System Using Earth’s Magnetic Field. IEEE Trans. Instrum. Meas. 2020, 69, 865–872. [Google Scholar] [CrossRef]
- Du, Y.; Arslan, T. A Segmentation-Based Matching Algorithm for Magnetic Field Indoor Positioning. In Proceedings of the 2017 International Conference on Localization and GNSS (ICL-GNSS), Nottingham, UK, 27–29 June 2017. [Google Scholar]
- Ma, Z.; Poslad, S.; Hu, S.; Zhang, X. A Fast Path Matching Algorithm for Indoor Positioning Systems Using Magnetic Field Measurements. In Proceedings of the IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2018. [Google Scholar]
- Ascher, C.; Kessler, C.; Weis, R.; Trommer, G.F. Multi-Floor Map Matching in Indoor Environments for Mobile Platforms. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Klepal, M. Indoor PDR Performance Enhancement using Minimal Map Information and Particle Filters. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 141–147. [Google Scholar]
- Davidson, P.; Collin, J.; Takala, J. Application of Particle Filters for Indoor Positioning Using Floor Plans. In Proceedings of the 2010 Ubiquitous Positioning Indoor Navigation and Location Based Service, Kirkkonummi, Finland, 14–15 October 2010. [Google Scholar]
- Jeon, S.; Lee, J.; Hong, H.; Shin, S.; Lee, H. Indoor WPS/PDR Performance Enhancement Using Map Matching Algorithm with Mobile Phone. In Proceedings of the IEEE PLANS, Position Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 385–392. [Google Scholar]
- Zampella, F.; Jiménez, A.; Granja, F.S. Indoor Positioning Using Efficient Map Matching, RSS Measurements, and an Improved Motion Model. IEEE Trans. Veh. Technol. 2015, 64, 1304–1317. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, Y.; Kyas, M. GeoF: A Geometric Bayesian Filter for Indoor Position Tracking in Mixed LOS/NLOS Conditions. In Proceedings of the 11th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 12–13 March 2014. [Google Scholar]
- Kushki, A.; Plataniotis, K.; Venetsanopoulos, A.N. Intelligent Dynamic Radio Tracking in Indoor Wireless Local Area Networks. IEEE Trans. Mob. Comput. 2009, 9, 405–419. [Google Scholar] [CrossRef]
- Pelka, M.; Hellbrück, H. Introduction, Discussion and Evaluation of Recursive Bayesian Filters for Linear and Nonlinear Filtering Problems in Indoor Localization. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Yim, J.; Jeong, S.; Joo, J.; Park, C. Utilizing Map Information for WLAN-Based Kalman Filter Indoor Tracking. In Proceedings of the 2008 Second International Conference on Future Generation Communication and Networking Symposia, Sanya, China, 13–15 December 2008; Volume 5, pp. 58–62. [Google Scholar]
- Zhao, Y.; Yang, Y.; Kyas, M. Comparing centralized Kalman filter schemes for indoor positioning in wireless sensor network. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011. [Google Scholar]
- Liu, D.; Xiong, Y.; Ma, J. Exploit Kalman filter to improve fingerprint-based indoor localization. In Proceedings of the 2011 International Conference on Computer Science and Network Technology, Harbin, China, 24–26 December 2011; Volume 4, pp. 2290–2293. [Google Scholar]
- Wang, H.; Lenz, H.; Szabo, A.; Bamberger, J.; Hanebeck, U.D. WLAN-Based Pedestrian Tracking Using Particle Filters and Low-Cost MEMS Sensors. In Proceedings of the 4th Workshop On Positioning, Navigation and Communication, Hannover, Germany, 22 March 2007. [Google Scholar]
- Górski, K.; Groth, M.; Kulas, L. A multi-building WiFi-based indoor positioning system. In Proceedings of the 2014 20th International Conference on Microwaves, Radar and Wireless Communications (MIKON), Gdansk, Poland, 16–18 June 2014. [Google Scholar]
- Kawecki, R.; Korbel, P.; Hausman, S. Influence of User Mobility on the Accuracy of Indoor Positioning with the use of RSSI and Particle Filter Algorithm. In Proceedings of the 2019 Signal Processing Symposium (SPSympo), Krakow, Poland, 17–19 September 2019; pp. 105–108. [Google Scholar]
- Galov, A.; Moschevikin, A. Bayesian Filters for ToF and RSS Measurements for Indoor Positioning of a Mobile Object. In Proceedings of the IEEE International Confernece on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013. [Google Scholar]
- Galčík, F.; Opiela, M. Grid-Based Indoor Localization Using Smartphones. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Evennou, F. Map-aided Indoor Mobile Positioning System using Particle Filter. In Proceedings of the 2003 IEEE Wireless Communications and Networking, New Orleans, LA, USA, 13–17 March 2005; Volume 4, pp. 2490–2494. [Google Scholar]
- Panyov, A.; Golovan, A.A.; Smirnov, A.S.; Kosyanchuk, V.V. Indoor Positioning Using Wi-Fi Fingerprinting, Magnetometer and Pedestrian Dead Reckoning. In Proceedings of the 21st Saint Petersburg International Conference On Integrated Navigation Systems, Saint Petersburg, Russia, 26–28 May 2014; pp. 129–134. [Google Scholar]
- Zhao, Y.; Li, X.; Wang, Y.; Xu, C.-Z. Biased Constrained Hybrid Kalman Filter for Range-Based Indoor Localization. IEEE Sens. J. 2017, 18, 1647–1655. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S. Simultaneous localization and mapping with unknown data association using FastSLAM. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 1985–1991. [Google Scholar]
- Li, X.; Wang, J.; Liu, C.; Zhang, L.; Li, Z. Integrated WiFi/PDR/Smartphone Using an Adaptive System Noise Extended Kalman Filter Algorithm for Indoor Localization. ISPRS Int. J. Geo-Inf. 2016, 5, 8. [Google Scholar] [CrossRef]
- Jianquan, G.; Wei, Z. An Anchor Free Location Algorithm for Large Scale Wireless Sensor Networks. In Proceedings of the 2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, Beijing, China, 12–15 October 2008; pp. 7–12. [Google Scholar]
- Beck, B.; Baxley, R. Anchor free node tracking using ranges, odometry, and multidimensional scaling. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 2209–2213. [Google Scholar]
- Beck, B.; Baxley, R.; Kim, J. Real-time, anchor-free node tracking using ultrawideband range and odometry data. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 286–291. [Google Scholar]
- Kuang, Y.; Åström, K.; Tufvesson, F. Single antenna anchor-free UWB positioning based on multipath propagation. In Proceedings of the 2013 IEEE International Conference on Communications (ICC), Budapest, Hungary, 9–13 June 2013; pp. 5814–5818. [Google Scholar]
- Liu, C.; Xie, L.; Wang, C.; Wu, J.; Lu, S. Track Your Foot Step: Anchor-Free Indoor Localization Based on Sensing Users’ Foot Steps. In Proceedings of the 2016 IEEE 13th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Brasilia, Brazil, 10–13 October 2016; pp. 201–209. [Google Scholar]
- Zhang, L.; Du, T.; Jiang, C. Indoor 3-D Localization Based on Received Signal Strength Difference and Factor Graph for Unknown Radio Transmitter. Sensors 2019, 19, 338. [Google Scholar] [CrossRef]
- Beck, B.; Baxley, R.J.; Ma, X. Uncooperative RSS-based emitter localization in uncalibrated mobile networks. In Proceedings of the 2016 IEEE 17th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Edinburgh, UK, 3–6 July 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Beck, B.; Lanh, S.; Baxley, R.; Ma, X. Uncooperative Emitter Localization Using Signal Strength in Uncalibrated Mobile Networks. IEEE Trans. Wirel. Commun. 2017, 16, 7488–7500. [Google Scholar] [CrossRef]
- Hall, D.L.; Narayanan, R.M.; Lenzing, E.H.; Jenkins, D.M. Passive Vector Sensing for Non-Cooperative Emitter Localization in Indoor Environments. Electronics 2018, 7, 442. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Advantages | Disadvantages |
|---|---|---|
| RSS | No need for time synchronization and angle measurement. Easy to implement. No need for extra hardware device. Eliminates energy consumption. | Prone to the noise, multipath effects and NLoS. Needs a fingerprinting database for scene analysis methods. |
| TOA | No need for any fingerprinting database. Provides high localization accuracy. | Needs time synchronization. Influences multipath and additive noise. Needs extra hardware device. Difficult to implement in narrow bandwidth. |
| TDOA | No need for any fingerprinting database. Does not require time synchronization among the device and received nodes. | Needs extra hardware devices. Difficult to implement in narrow bandwidth. Requires time synchronization among the received nodes. |
| RTT | No need for clock synchronization between the nodes. Reduces complexity, enhances reliability. High range measurement and update rate. Apply for passive RFID with proper synchronization. | Suffers multipath effects. Different processing time delays. Phase noise affects the accurate clock speed. No simultaneous response to large requests. |
| AOA | No time synchronization between measuring units. Provides high accuracy. | Needs an antenna array. Requires extra hardware. Influences multipath, NLoS, and additive noise. |
| DOA | Highly influenced by multipath effects. | Accuracy relies on accurate angle measurement. |
| ADOA | No need for any fingerprinting database. | Requires extra sensors like gyroscopes. |
| No need the information of angles in the variance between two AOA values. | ||
| POA | Easy to obtain the signal’s phase change during the prorogation. Improves the accuracy integrated with RSSI, TOF, and TDOA. | Has an infinite number of path lengths. Requires LoS for high accuracy. Phase ambiguity issue due to phase wrapping. |
| PDOA | High accuracy. Reduces multipath effects. | Ambiguities in the distance estimation. Accuracy depends on multipath effect. |
| CSI | Provides more fine-grained signal characteristic information. Good stability and higher accuracy than RSS. | Needs labour-intensive site survey to calibrate. Does not need to be appropriate for most situations. Needs larger storage and more operation time. |
| RSRP RSRQ | Supports greater power information. Reduces proneness to local disturbances in the environment. | Impacts station interference and thermal noise. |
| Technologies | Parameters | Advantages | Disadvantages |
|---|---|---|---|
| Wi-Fi | RSS/AOA TDOA/TOA RTT/CSI | Moderate power (216.71 mW on average). No extra hardware. Easy deployment. Cover large regions. | Affects time-varying RSS. Difficult to finish the task of building a smart city. Accuracy depends on the amount of access points. |
| Bluetooth | RSS/TOA TDOA AOA/TOF | Low power (0.367 mW on average). Easy deployment. Has a much higher data rate than ZigBee. | Needs extra hardware. Affect time-varying RSS. Interferes with same frequency band. Accuracy depends on its access point. Has a much shorter range than ZigBee. |
| RFID | RSS/TOA DOA/AOA TDOA PDOA | No contact and NLoS nature. Simultaneous and fast reading of multiple tag. Resilience to environmental changes. Reduce sensitivity regarding user orientation. | Needs extra hardware. Multipath effect and signal fluctuation. Large error with more target tags to locate. Limited capabilities of the passive tags. |
| ZigBee | RSS/TOA TDOA/AOA | Lower power (17.68 mW on average). No require much network bandwidth. Has higher latencies | Needs extra hardware. Interference and strength of signals. Difficult to create a connection with the smart phone. |
| UWB | AOA/TOA TDOA RSS/DOA | High accuracy. Unaffected by interference. Fewer effects on humans. Suitable for body-centric and wearable network. | Short range, high cost. Challenges in NLoS. Needs extra hardware. Provides high accuracy. |
| NFC | RSS | Low cost, high accuracy. Provides secure and private navigation. | Accuracy depends on the number and proper placement of tags. |
| LoRa | RSS TOA TDOA | Long range. Extremely low energy. Covers large area. | Signal attenuation and multipath. Long-range between server and device. Operate outdoor-to-indoor |
| SigFox | RSS TOA | Long range, covers large area. Serves larger active nodes. Very low energy. | Long-range between server and device. Operate outdoor-to-indoor signal attenuation. |
| Cellular 1G/2G/3G 4G/5G Long-term evolution (LTE) | TOA/CSI TDOA/RSS RSRP/RSRQ | Long-range. High accuracy. No extra cost. | Requires synchronized based stations. |
| Hybrid | RSS /TDOA RSRQ/RSRP PDOA/TOA AOA/DOA | Improve the performance. Overcome the limitations. Better than pure algorithm solution. Reduces system complexity. | Not enough information with single network |
| Algorithms | Usage Information | Measurement | Pros and Cons |
|---|---|---|---|
| Proximity (range-free information) | Cell origin results | Limited coverage, connectivity-based | High variances. Inaccurate and unsatisfactory in positioning. Coarse-grained results. |
| Trilateration (range-based information) | Geometric properties | Timing information, distance-based | Ineffective for nonlinear model. Fined-grained results. |
| Multilateration (range-based information) | Geometric properties | Timing information, distance-based | Ineffective for nonlinear model. Fined-grained results. |
| Triangulation (range-based information) | Geometric properties | Incident angle, direction-based | Ineffective for nonlinear model. Fined-grained results. |
| Fingerprinting (range-free information) | Statistical and empirical analysis | Signal strength intensity, signal-based | Accurate high positioning. Reduce apparatus complexity. Mitigate operation and human power. Effective linear and nonlinear models. Easy upgrade information to amend. Challenges for dynamically environmental changes. |
| Paper | Evaluation | Data Type | Infrastructure | Performance |
|---|---|---|---|---|
| [193] | LiFS, automatic FPs calibration | Wi-Fi/accelerometer sensors. | Entirety office building. Cover range 1600 m2, Total of 26 rooms. | 5.88 m (average error) |
| Error 80% under 9 m | ||||
| Error 60% under 6 m (small and room error) | ||||
| [198] | Unsupervised learning | Wi-Fi | Office building, (length 80 m and width 32 m) floor plan. | Around 3 m |
| Manual calibration effortless. | ||||
| [199] | FreeLoc, Handle complexity calibration of users and devices | Wi-Fi | University building. | Heterogeneity devices error (around 2 and 4 m) |
| robust and consistent localization performance | ||||
| [200] | Extracting effective RSS from crowdsource data | Wi-Fi/ IMU data | Office building, floor area 4600 m2 and corridor area 411 m2. | Positioning accuracy 1.5 m |
| RSS changing information from multiple trajectory | ||||
| [197] | RCILS. Semantic graph and activity sequence, | Wi-Fi/accelerometer/ compass gyroscope and barometer. | Office building, 2756.25 m2 floor plan. | Medium error 1.6 m |
| mitigates RSS variance due to device heterogeneity and environmental changes condition. |
| Paper | Evaluation | Data Type | Infrastructure | Performance |
|---|---|---|---|---|
| [201] | Wi-FiSLAM | Wi-Fi | University building, floor level 250 m to a half of km | Mean localization error 3.97 ± 0.95 m |
| GP-LVM (special constraint and unlabelled map information) | ||||
| [202] | Wi-Fi GraphSLAM | Wi-Fi/pedometry and gyroscope | University building, cover 600 m2, 1.2 km radius | Localization accuracy range 1.75 m to 2.8 m, mean error 2.23 ± 1.25 m |
| unnecessary special constraint and labelled data, addressing runtime complexity | ||||
| [203] | FootSLAM | Foot mounted IMU sensors | Building/ constraint area | Pedestrian’s relative location accuracy, 1 to 2 m at two reference points |
| approach to track user’s step and location based on odometry(track motion) | ||||
| [205] | PlaceSLAM | Proximity information | Two office building | Tracking error 2–10 m from pedestrian walking |
| Uses Bayesian and Particle Filtering | ||||
| [204] | WiSLAM, | Wi-Fi/IMU data | building | Upgrade FootSLAM convergence, accuracy is up to 2 m |
| Probabilistic model of Bayesian statics, concerted FootSLAM and PlaceSLAM | ||||
| [148] | SignalSLAM | Wi-Fi and Bluetooth RSS/4G LTE, RSRP/magnetic/GPS reference points NFC at specific landmarks and PDR from IMU sensor | Walking naturally around the building | Medium tracking accuracy 11 to 16.5 m |
| Modification of GraphSLAM and generate the multi-modal signal maps from available multiple sources |
| Approach | Scheme | Moving to Evaluation/Appraisal | Performance/Limitations/Remarks |
|---|---|---|---|
| Classical machine learning | [212] | Utilized Principle Component Analysis (PCA) for extracting data feature from the radio map, time and manpower of computation costs covered with KNN, DT, RF, SVM. | RF 70% in static and KNN 33% in dynamic corresponding to reducing the time, outperforming positioning accuracy. |
| [213] | Comparison of the performance of each classification algorithm with the confusion matrix (NN, SMO, DT J48, KNN, AdaBoost, Bagging, Naive Bayes, Bayesian Network), using UJIIndoorLoc database. | Building, floor and region classification, respectively, in which NN showed the best results in accuracy and time depletion. | |
| [214] | Evaluation of the six location classification algorithms, ANN, KNN, DT, NB, ELM and SVM and then the normalization was performed on the data with the standard score (z-scores) and feature scaling, using the UCI library. | Positioning accuracy relatively with two normalization methods, KNN is superior on these methods 97.98 and 98.75, respectively. | |
| [215] | Effective for non-linear localization feature extraction leading to mitigate the positioning error from original RSS information with KDDA transform and RVR supports a better regression effect in the reliability system. | Positioning errors are 1.5 and 2 m based on the accuracy of each algorithms. | |
| Extreme learning machine | [217] | Evaluates higher accuracy based on the uncertainty data with DZ-ELM to increase the original ELM performance, Introduces a dead zone approach for the solutions. | Localization accuracy of 2.19 m DZ-ELM and 2.84 m ELM. |
| [218] | Uses OS-ELM, ability to reduce computational workload costs in offline calibration survey. | Considers training time, testing time and the average localization performance, localization accuracy under human interference and circumstances of opening/closing doors. | |
| [216] | Uses KPCA-ELM leading to a fast learning ability and effective accuracy positioning, reduces large data dimension. | Provides a non-linear attenuation effect influence on RSS correlation. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim Geok, T.; Zar Aung, K.; Sandar Aung, M.; Thu Soe, M.; Abdaziz, A.; Pao Liew, C.; Hossain, F.; Tso, C.P.; Yong, W.H. Review of Indoor Positioning: Radio Wave Technology. Appl. Sci. 2021, 11, 279. https://doi.org/10.3390/app11010279
Kim Geok T, Zar Aung K, Sandar Aung M, Thu Soe M, Abdaziz A, Pao Liew C, Hossain F, Tso CP, Yong WH. Review of Indoor Positioning: Radio Wave Technology. Applied Sciences. 2021; 11(1):279. https://doi.org/10.3390/app11010279
Chicago/Turabian StyleKim Geok, Tan, Khaing Zar Aung, Moe Sandar Aung, Min Thu Soe, Azlan Abdaziz, Chia Pao Liew, Ferdous Hossain, Chih P. Tso, and Wong Hin Yong. 2021. "Review of Indoor Positioning: Radio Wave Technology" Applied Sciences 11, no. 1: 279. https://doi.org/10.3390/app11010279
APA StyleKim Geok, T., Zar Aung, K., Sandar Aung, M., Thu Soe, M., Abdaziz, A., Pao Liew, C., Hossain, F., Tso, C. P., & Yong, W. H. (2021). Review of Indoor Positioning: Radio Wave Technology. Applied Sciences, 11(1), 279. https://doi.org/10.3390/app11010279