Motion Planning for Autonomous Vehicles Considering Longitudinal and Lateral Dynamics Coupling



Abstract
1. Introduction
- (1)
- Based on the statistical results of naturalistic driving data, a nonlinear vehicle model describing both longitudinal and lateral dynamics in the normal operating range was first established. It was simplified to a single-coupled dynamical model (SDM) with enough accuracy by analyzing the transfer characteristics and dynamical coupling effects at the equilibrium points numerically. This simplified model has a good balance between model accuracy and complexity.
- (2)
- By using SDM, a NMPC-based motion planner was further designed considering the coupling effects of lateral and longitudinal dynamics. The improvement of control performance was validated by several comparative hardware-in-the-loop (HIL) experiments under different dynamical driving conditions.
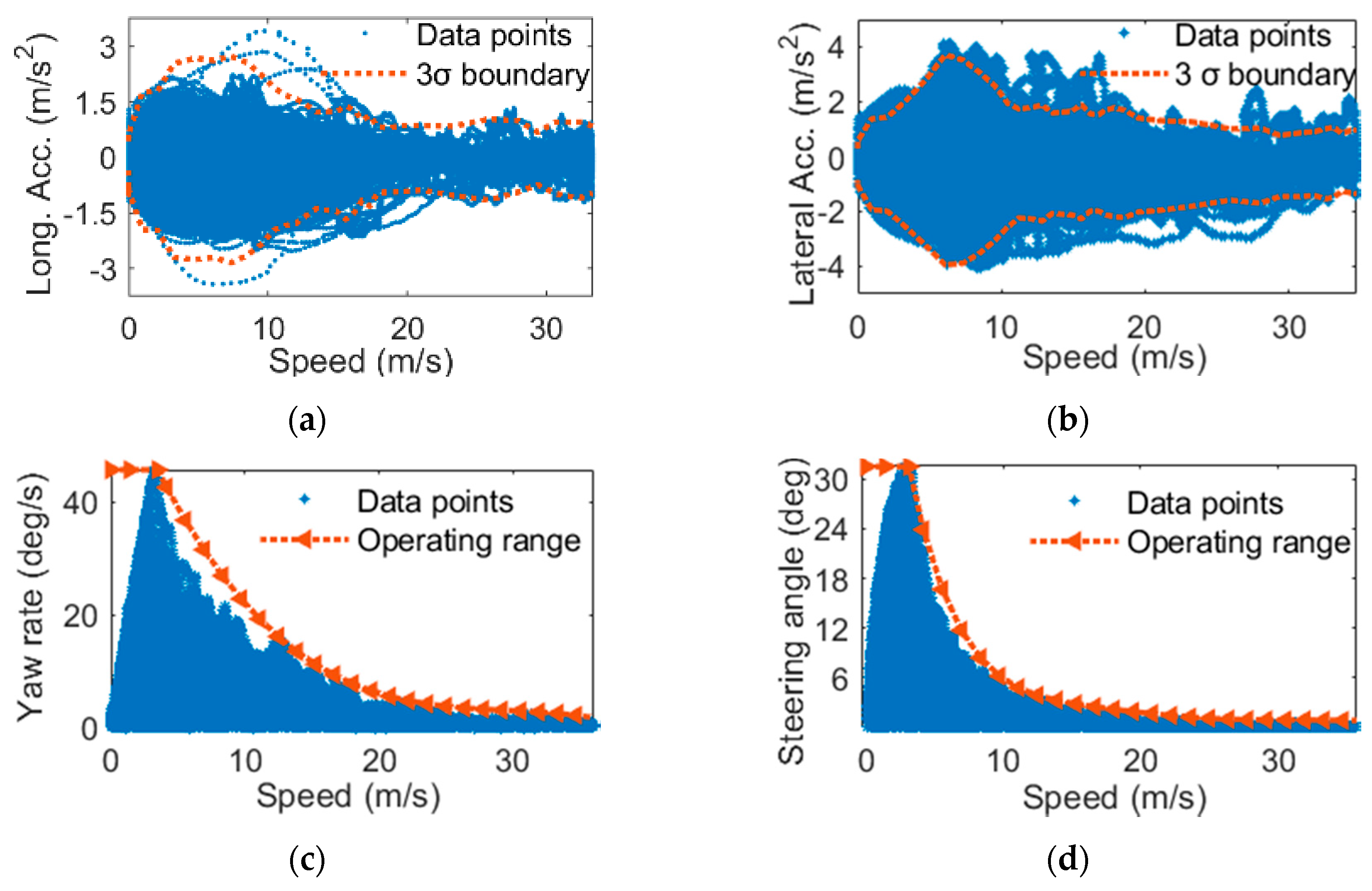
2. Statistical Analysis of Operating Range
- (1)
- Using linear or nonlinear tire models;
- (2)
- Whether the transfer of the vertical load is negligible;
- (3)
- Whether the coupling between the longitudinal and lateral dynamics can be considered.
- (1)
- Because the absolute value of the lateral acceleration was less than , which lies in the linear region of the tires, the vertical load transfer along the lateral direction can be ignored [28].
- (3)
- The longitudinal acceleration was less than 2.2 when the vehicle speed was more than 10 , so the vertical load transfer along the longitudinal direction can be ignored [29].
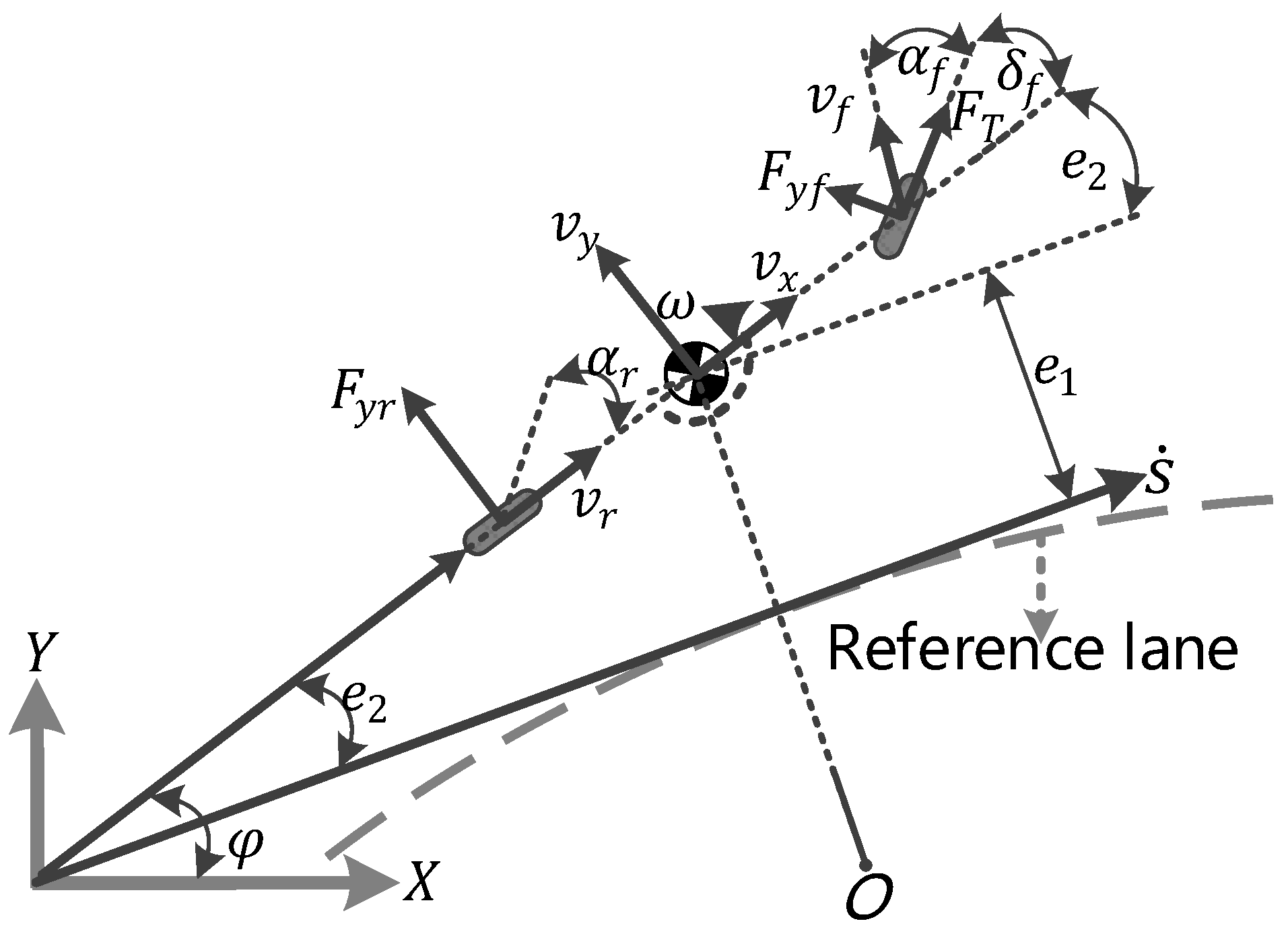
3. Dynamical Model for Motion Planning
3.1. Longitudinal and Lateral Coupling Model
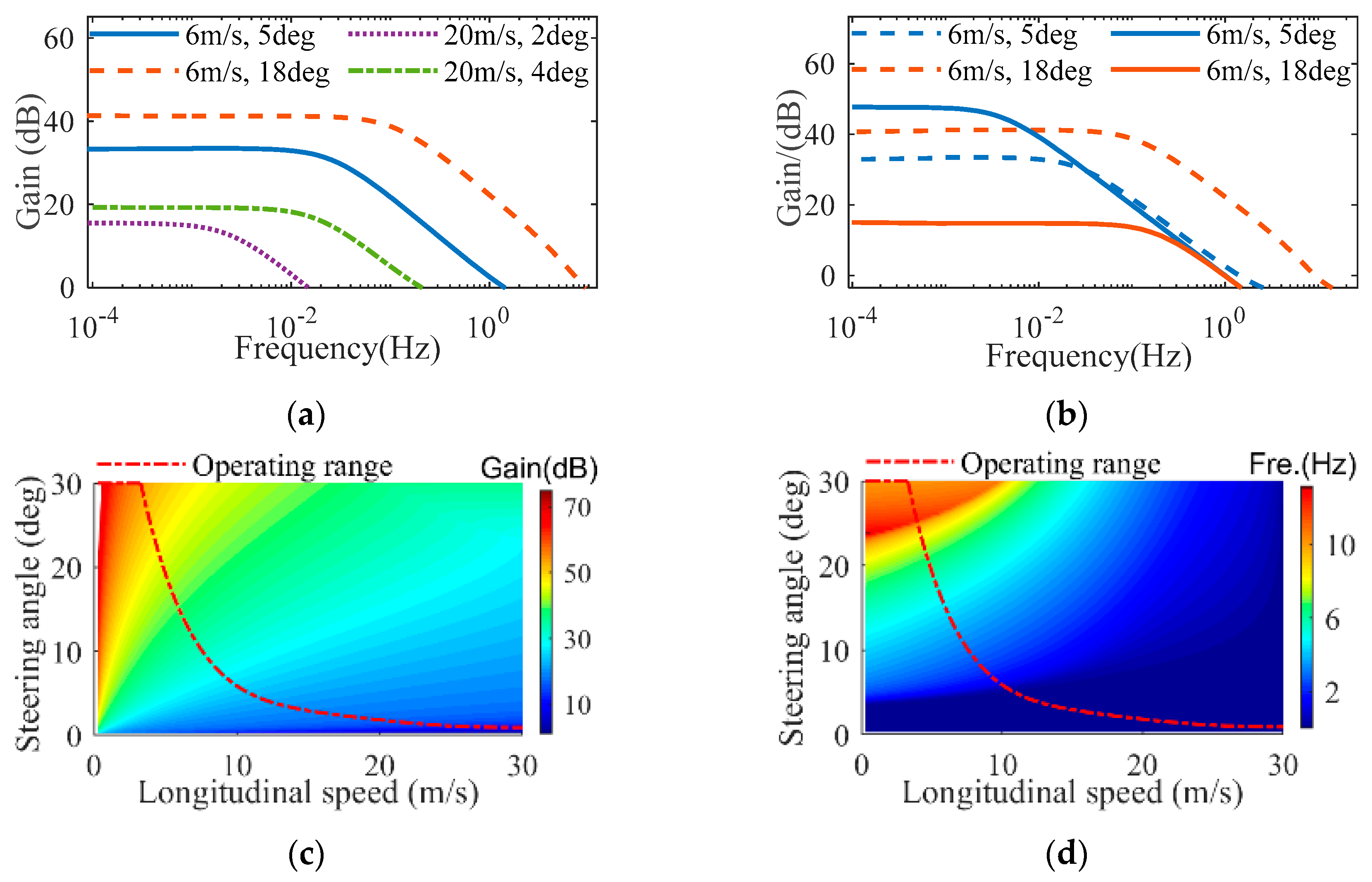
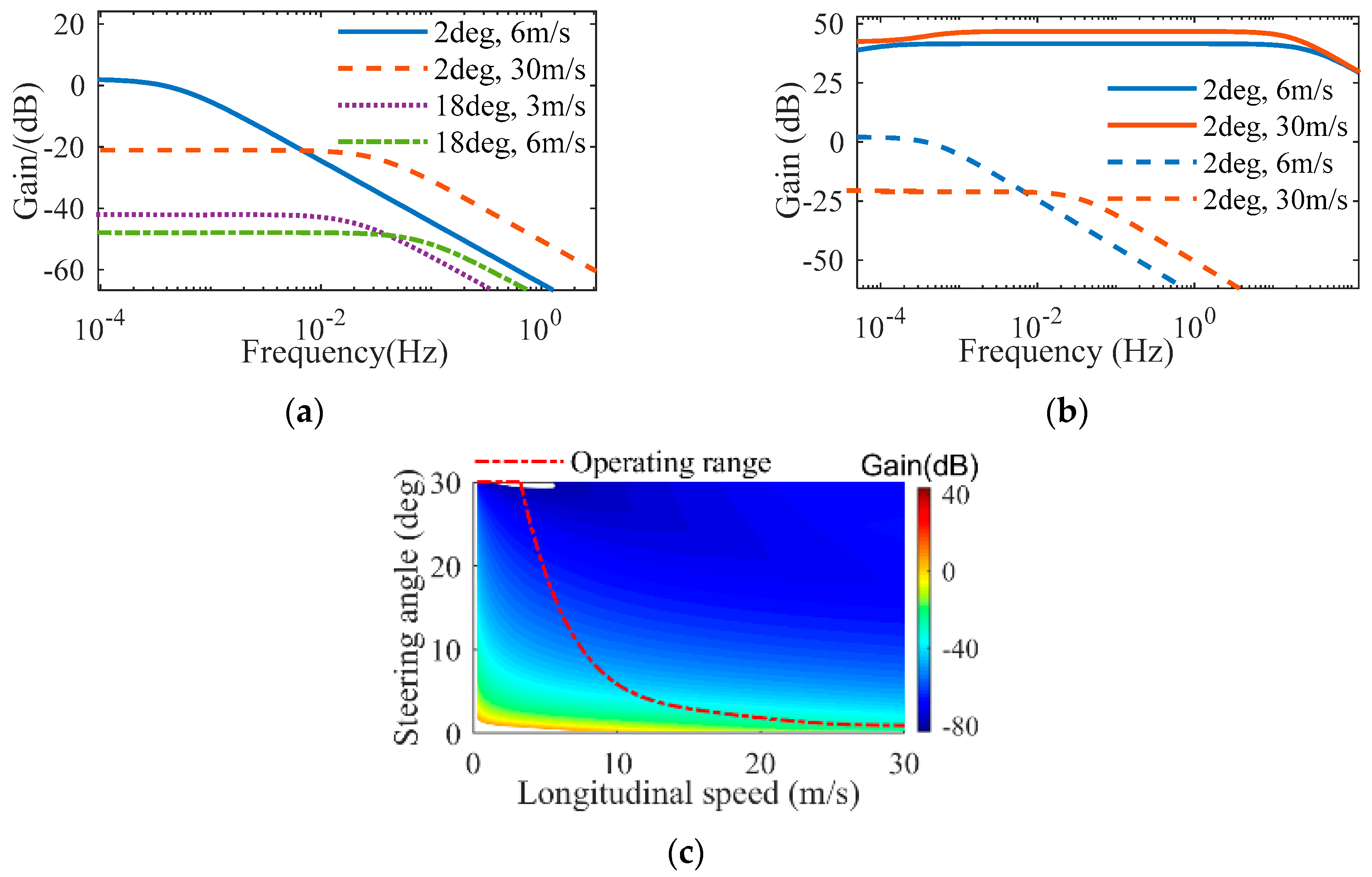
3.2. Simplification of Dynamical Model by Coupling Analysis
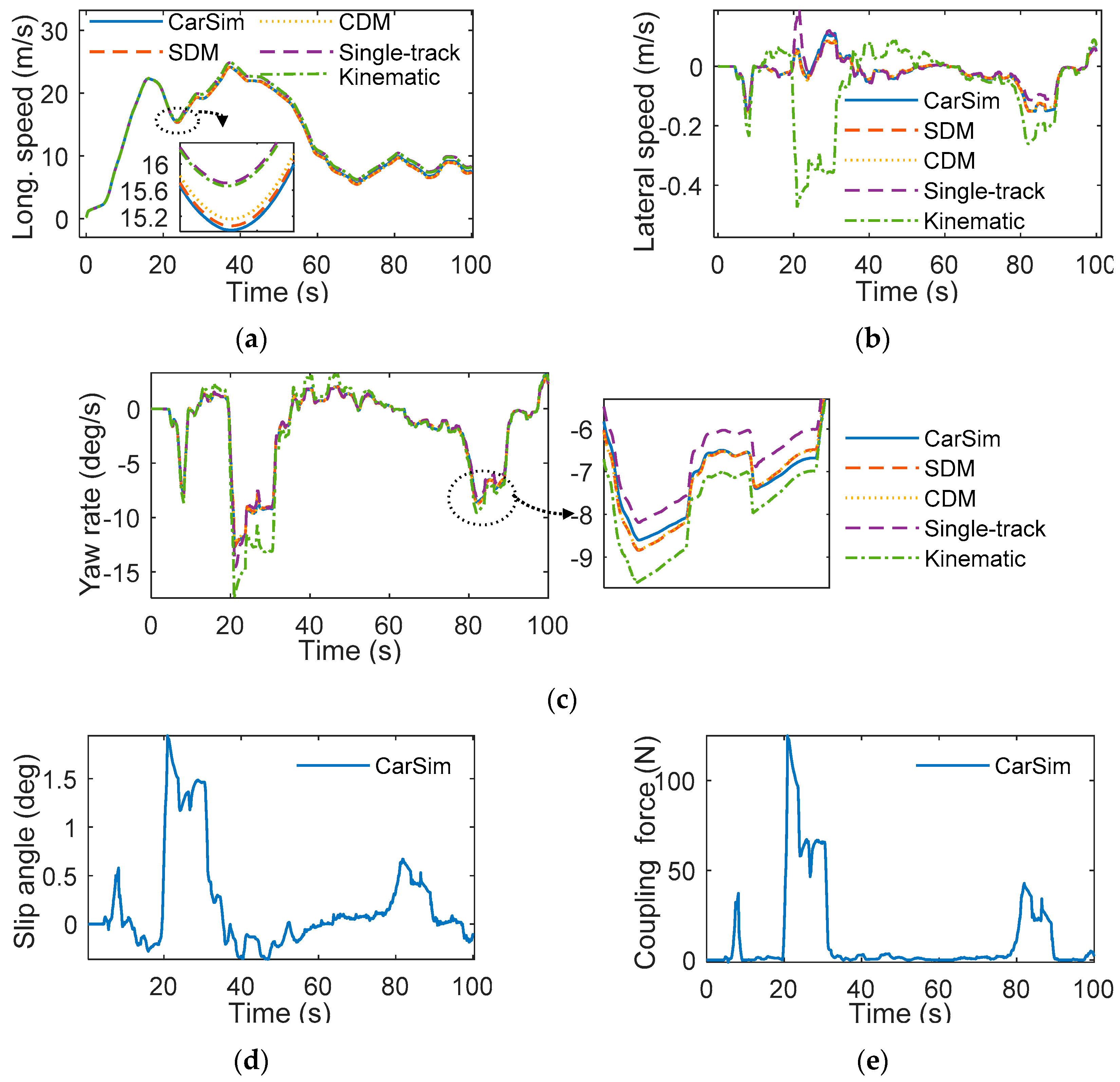
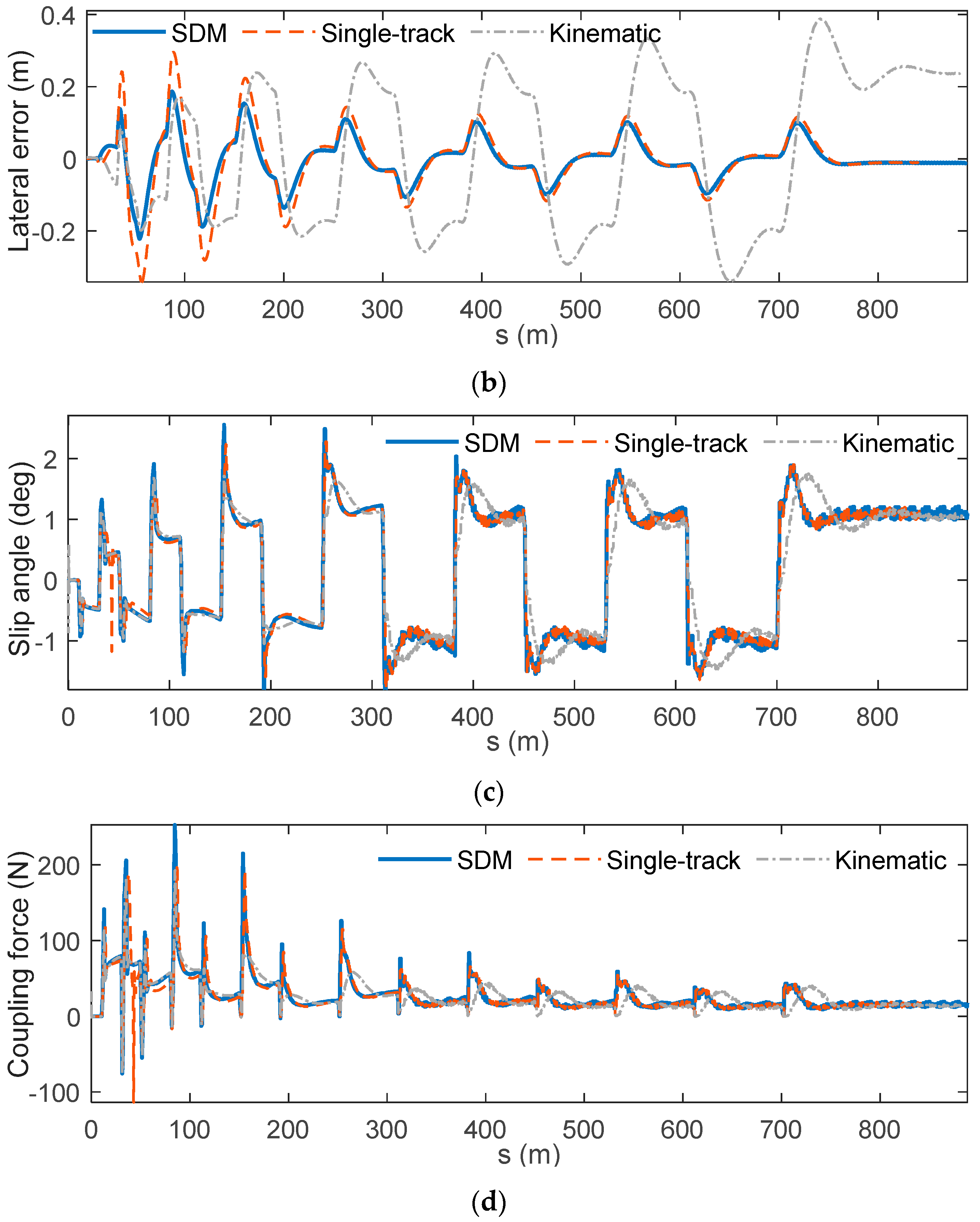
3.3. Validation of Single-Coupled Model
4. Motion Planning Application and Analysis
4.1. NMPC Problem Formulation
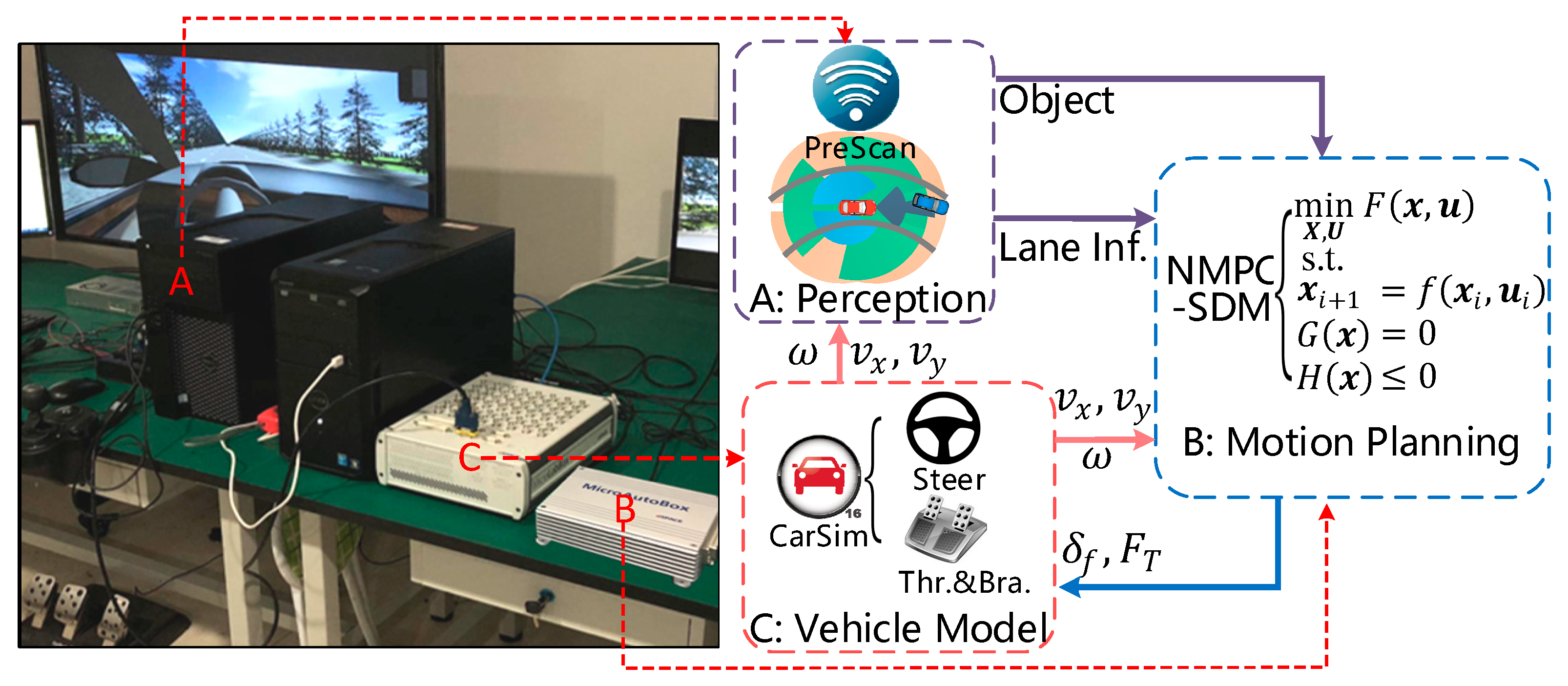
4.2. Platform for HIL Test
| Algorithm 1 Outputs: Throttle , brake , steering wheel angle |
| 1: Inputs: , and , and |
| 2: while true do |
| 3: , Initialization of control vector and discretization step . |
| 4: Using as control input vector, as initial state, discretization state function (9) with multiple shooting in all shooting intervals to obtain the states vector . |
| 5: Prepare the nonlinear program Equations (10)–(18) with and as optimization variables. |
| 6: Using SQP with real-time iterative framework to solve the nonlinear program, and the optimal control vector is obtained. |
| 7: Send to the inverse vehicle dynamics model. |
| 8: Calculate , and . |
| 9: end while |
4.3. Experimental Results and Analysis
- (1)
- (2)
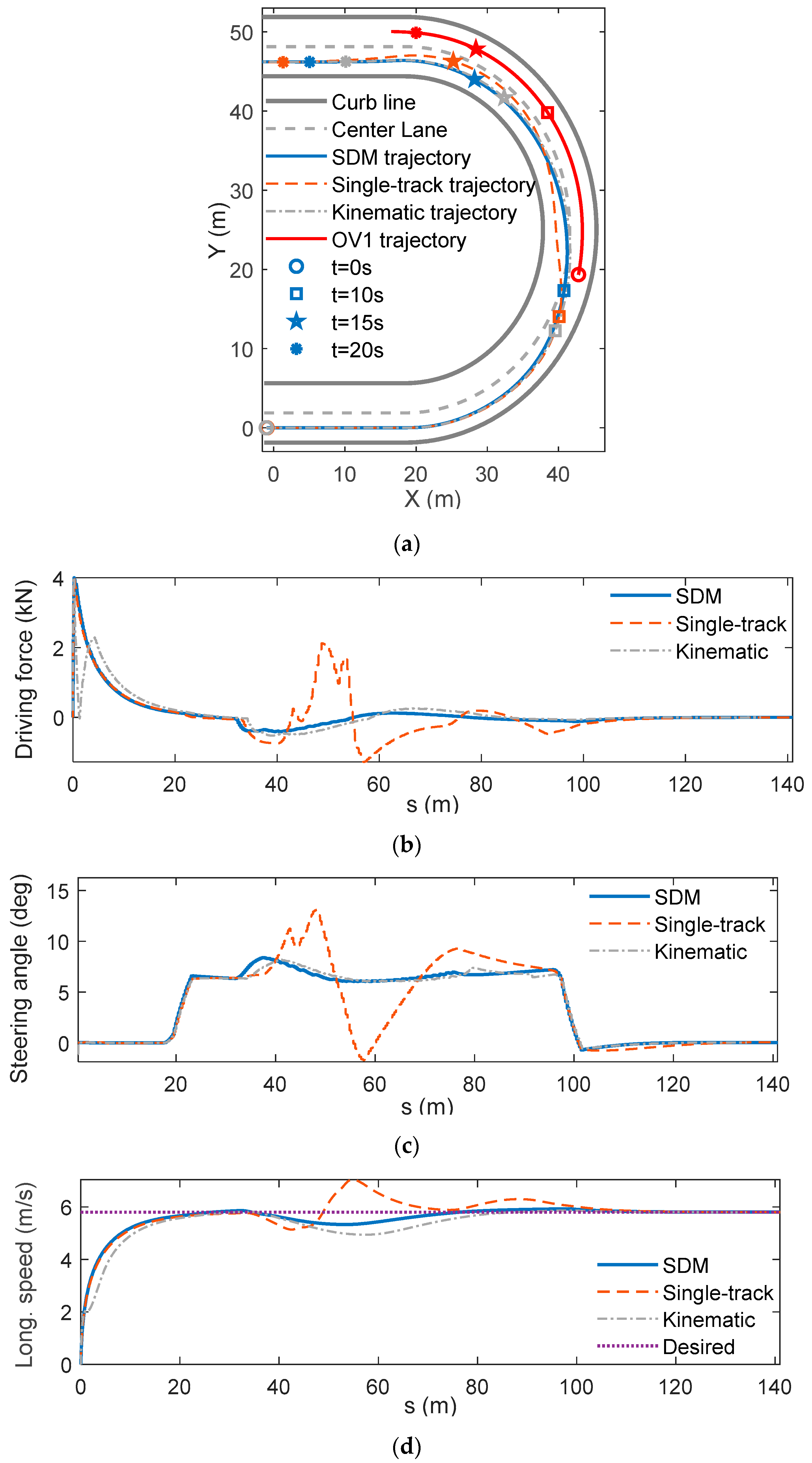
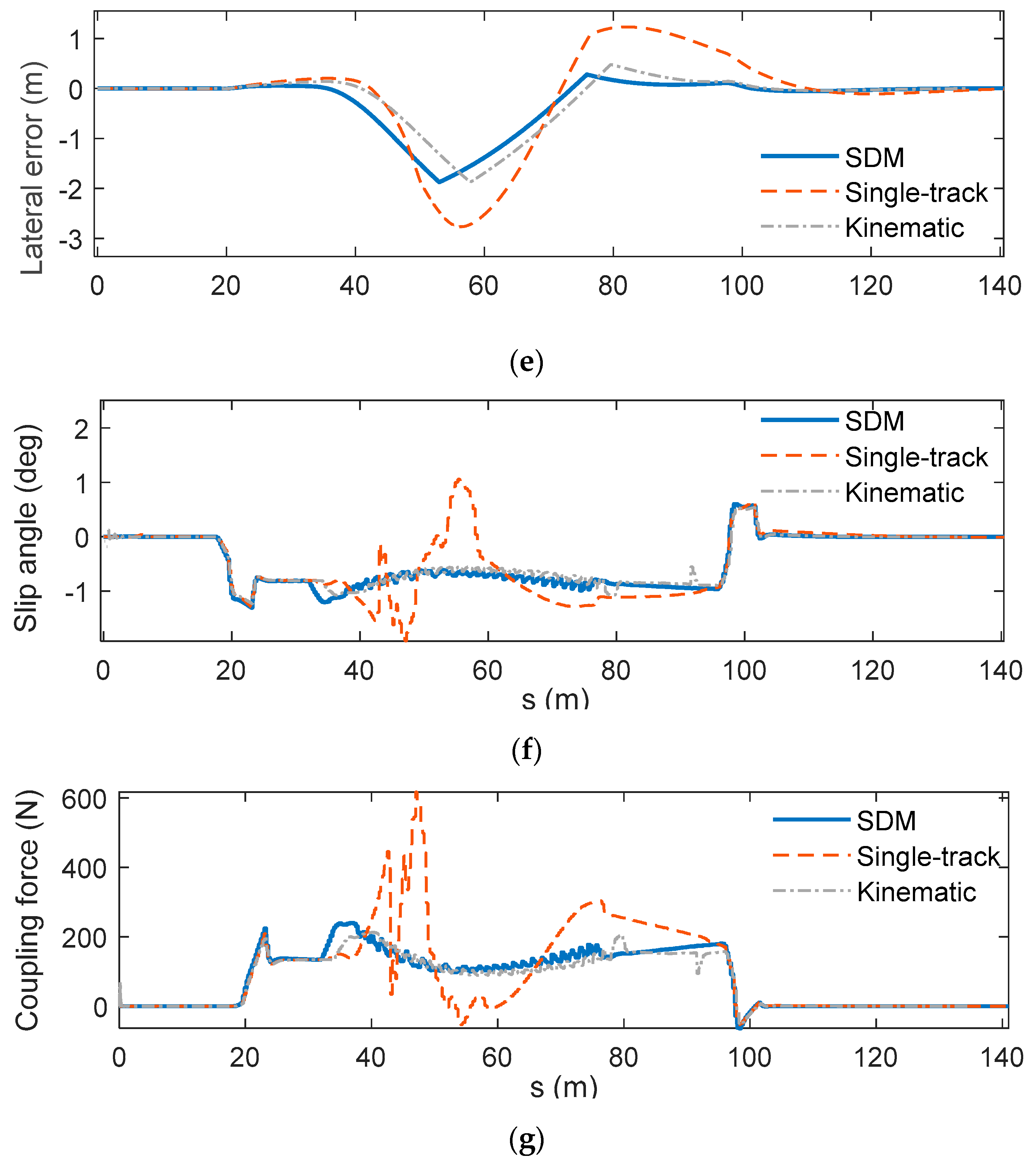
- SCENARIO 2 verifies the effectiveness of NMPC-SDM when the vehicle makes a lane change in a U-turn with low speed, as shown in Figure 10a. It consists of two straight roads at the start and the end, and an bend in the middle (Curvature of the bend is ). An obstacle vehicle denoted by OV1 drives along the right lane.
- (3)
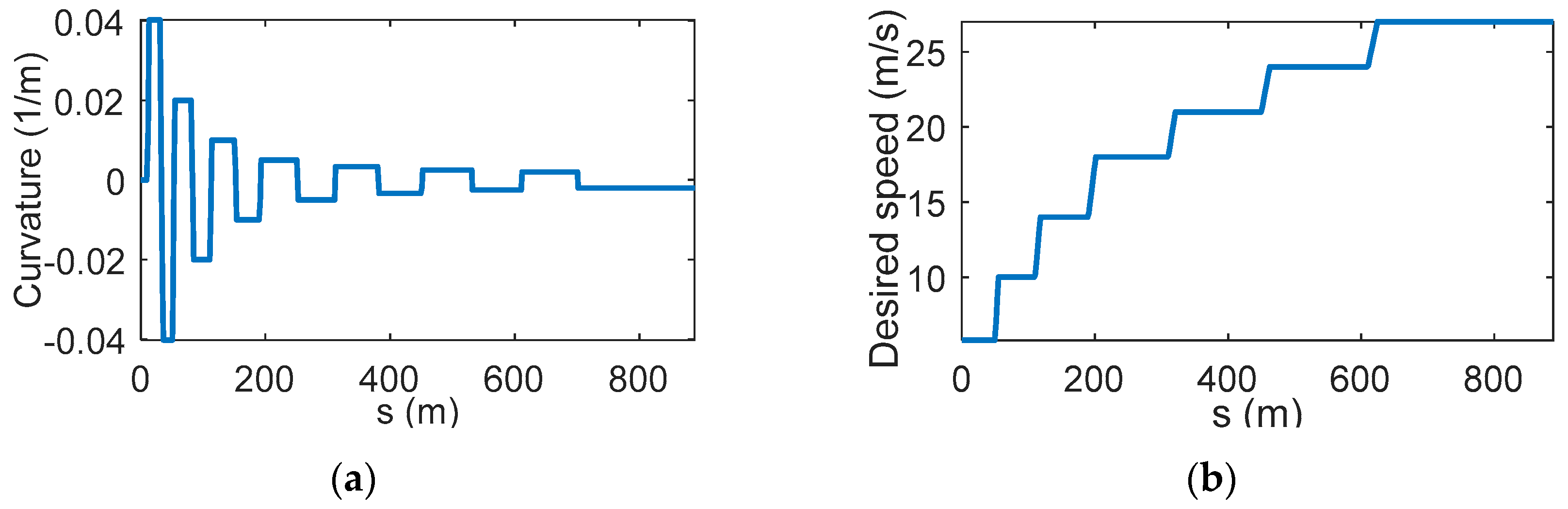
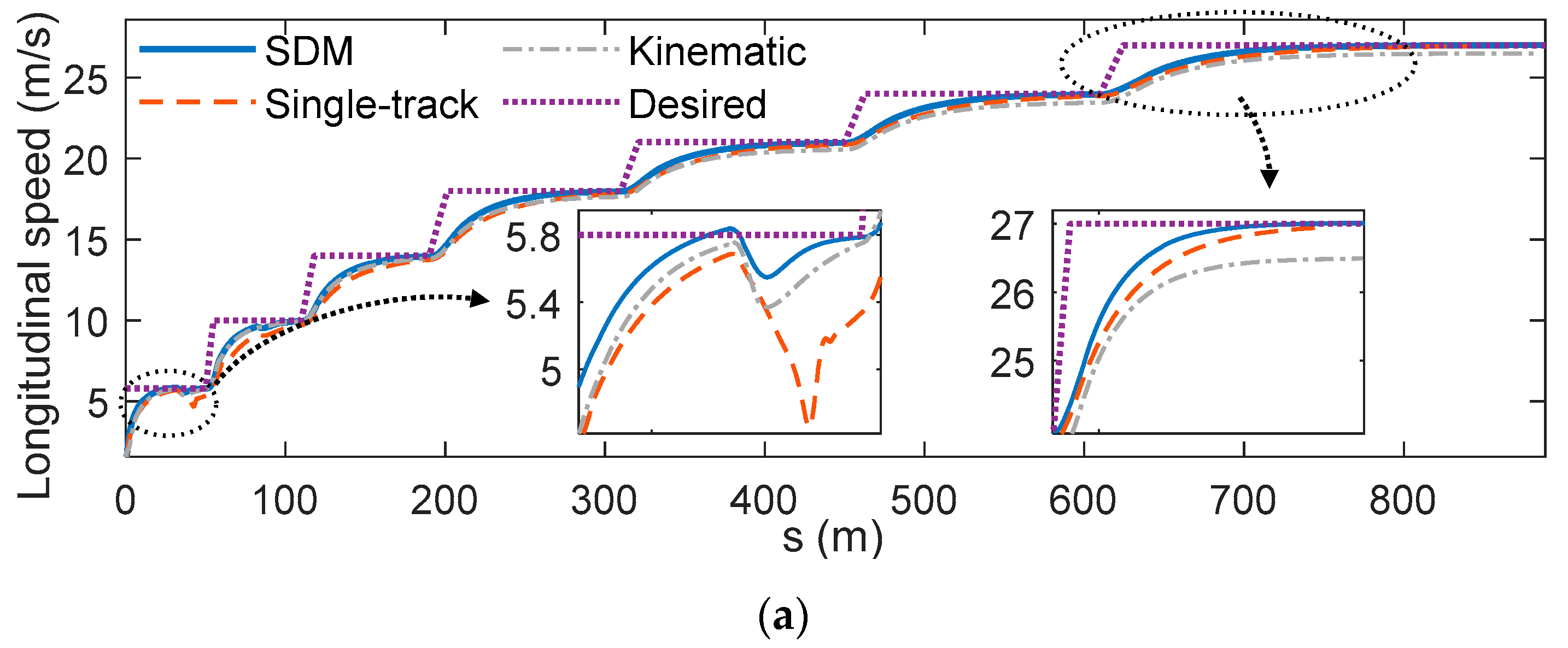
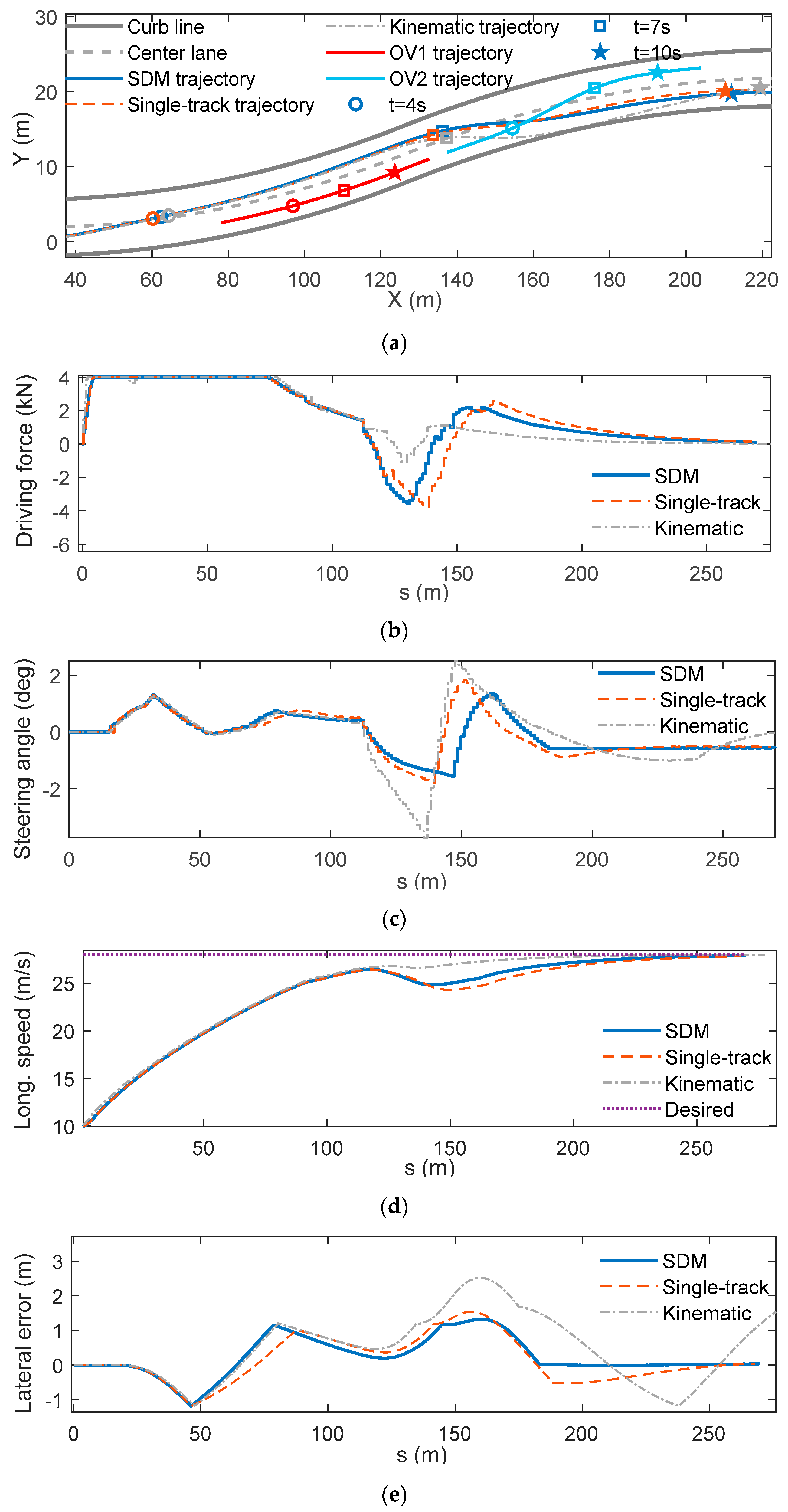
- SCENARIO 3 is an overtaking process with high speed on several successive bends as shown in Figure 11a.
5. Conclusions
- (1)
- In order to predict vehicle states accurately, especially in the conditions with low-speed and large steering angle, the coupling effect between the lateral and longitudinal dynamics is not negligible;
- (2)
- The SDM proposed in this paper can characterize the vehicle longitudinal and lateral dynamical coupling effect and achieve a good balance between the accuracy and complexity;
- (3)
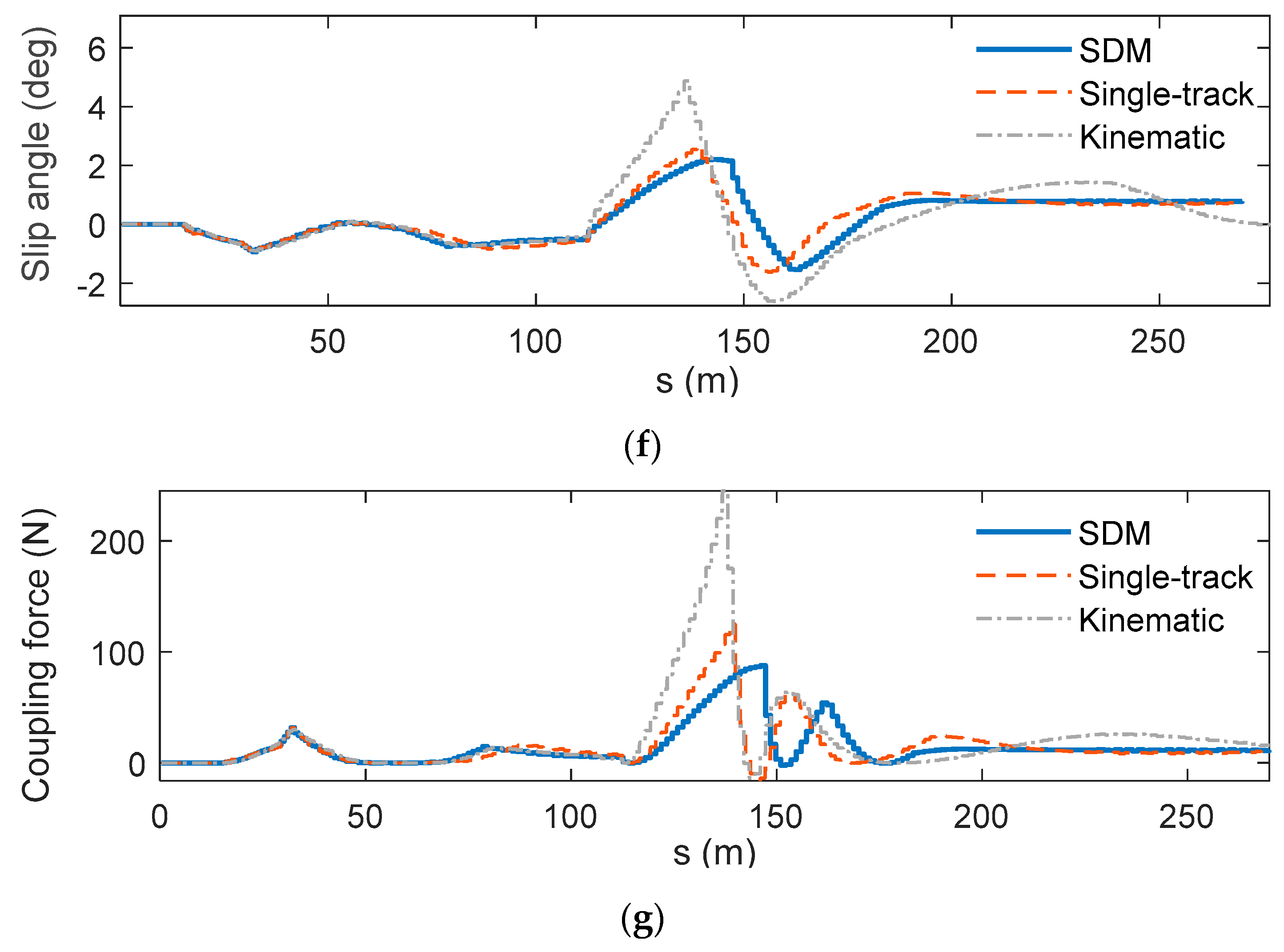
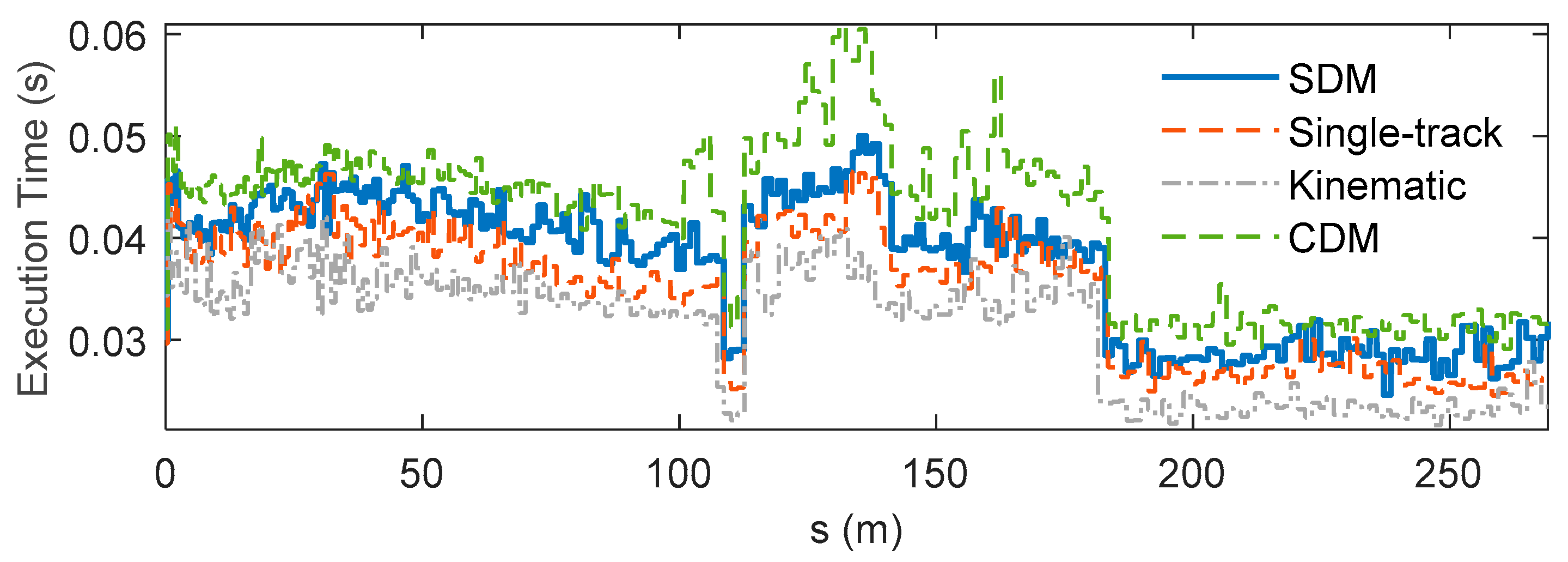
- Compared with the kinematic and single-track model-based planners, the proposed NMPC-SDM planner improves the performance of motion planning in normal driving.
Author Contributions
Funding
Conflicts of Interest
References
- Li, K.; Li, S.; Gao, F.; Lin, Z.; Li, J.; Sun, Q. Robust Distributed Consensus Control of Uncertain Multi-Agents Interacted by Eigenvalue-Bounded Topologies. IEEE Internet Things J. 2020. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, F.; Wang, K.; Lin, W.; Xu, X.; Chen, C. Data-Driven Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1624–1639. [Google Scholar] [CrossRef]
- Watzenig, D.; Horn, M. Automated Driving: Safer and More Efficient Future Driving; Springer: London, UK, 2016; pp. 3–17. [Google Scholar]
- Schwarting, W.; Alonso-Mora, J.; Rus, D. Planning and Decision-Making for Autonomous Vehicles. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 187–210. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Katrakazas, C.; Quddus, M.; Chen, W.H. Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions. Trans. Res. Part C Emerg. Technol. 2015, 60, 416–442. [Google Scholar] [CrossRef]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators, and Mobile Robots. Int. J. Robot. Res. 1985, 5, 90–98. [Google Scholar] [CrossRef]
- Lee, K.; Kum, D. Collision Avoidance/Mitigation System: Motion Planning of Autonomous Vehicle via Predictive Occupancy Map. IEEE Access 2019, 7, 52846–52857. [Google Scholar] [CrossRef]
- Huang, Y.; Ding, H.; Zhang, Y.; Wang, H.; Cao, D.; Xu, N.; Hu, C. A Motion Planning and Tracking Framework for Autonomous Vehicles Based on Artificial Potential Field Elaborated Resistance Network Approach. IEEE Trans. Ind. Electron. 2020, 67, 1376–1386. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006; pp. 85–117. [Google Scholar]
- Zhang, C.; Chu, D.; Liu, S.; Deng, Z.; Wu, C.; Su, X. Trajectory Planning and Tracking for Autonomous Vehicle Based on State Lattice and Model Predictive Control. IEEE Intell. Transp. Syst. Mag. 2019, 11, 29–40. [Google Scholar] [CrossRef]
- Kuwata, Y.; Teo, J.; Fiore, G.; Karaman, S.; Frazzoli, E.; How, J.P. Real-Time Motion Planning with Applications to Autonomous Urban Driving. IEEE Trans. Control Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-Based Algorithms for Optimal Motion Planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Chen, L.; Shan, Y.; Tian, W.; Li, B.; Cao, D. A Fast and Efficient Double-Tree RRT∗-Like Sampling-Based Planner Applying on Mobile Robotic Systems. IEEE/ASME Trans. Mech. 2018, 23, 2568–2578. [Google Scholar] [CrossRef]
- Liu, J.; Jayakumar, P.; Stein, J.L.; Ersal, T. Combined Speed and Steering Control in High-Speed Autonomous Ground Vehicles for Obstacle Avoidance Using Model Predictive Control. IEEE Trans. Veh. Technol. 2017, 66, 8746–8763. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, W.; Tomizuka, M. Autonomous Driving Motion Planning with Constrained Iterative LQR. IEEE Trans. Intell. Veh. 2019, 4, 244–254. [Google Scholar] [CrossRef]
- Gao, Y. Model Predictive Control for Autonomous and Semi-Autonomous Vehicles. Ph.D. Thesis, Department Engineering Mechanical Engineering, University of California, Berkeley, CA, USA, 2014. [Google Scholar]
- Gao, F.; Lin, F.; Liu, B. Distributed Hinf Control of Platoon Interacted by Switching and Undirected Topology. Int. J. Autom. Technol. 2020, 21, 259–268. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Y.; Shao, Z.; Jia, N. Simultaneous Versus Joint Computing: A Case Study of Multi-Vehicle Parking Motion Planning. J. Comput. Sci. 2017, 20, 30–40. [Google Scholar] [CrossRef]
- Rastgoftar, H.; Zhang, B.; Atkins, E.M. A Data-Driven Approach for Autonomous Motion Planning and Control in Off-Road Driving Scenarios. In Proceedings of the American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 5876–5883. [Google Scholar]
- Kong, J.; Pfeiffer, M.; Schildbach, G.; Borrelli, F. Kinematic and Dynamic Vehicle Models for Autonomous Driving Control Design. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 1094–1099. [Google Scholar]
- Ma, C.; Xue, J.; Liu, Y.; Yang, J.; Li, Y.; Zheng, N. Data-Driven State-Increment Statistical Model and Its Application in Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3872–3882. [Google Scholar] [CrossRef]
- Carvalho, A.; Gao, Y.; Gray, A.; Tseng, H.E.; Borrelli, F. Predictive Control of An Autonomous Ground Vehicle Using An Iterative Linearization Approach. In Proceedings of the IEEE Conference on Intelligent Transportation Systems (ITSC 2013), Hague, The Netherlands, 6–9 October 2013; pp. 2335–2340. [Google Scholar]
- Wang, H.; Huang, Y.; Khajepour, A.; Zhang, Y.; Rasekhipour, Y.; Cao, D. Crash Mitigation in Motion Planning for Autonomous Vehicles. IEEE Trans. Intell. Trans. Syst. 2019, 20, 3313–3323. [Google Scholar] [CrossRef]
- Betz, J.; Wischnewski, A.; Heilmeier, A.; Nobis, F.; Hermansdorfer, L.; Stahl, T.; Herrmann, T.; Lienkamp, M. A Software Architecture for the Dynamic Path Planning of an Autonomous Racecar at the Limits of Handling. In Proceedings of the IEEE International Conference on Connected Vehicles and Expo (ICCVE 2019), Graz, Austria, 4–8 November 2019; pp. 1–8. [Google Scholar]
- Stahl, T.; Wischnewski, A.; Betz, J.; Lienkamp, M. Multilayer Graph-Based Trajectory Planning for Race Vehicles in Dynamic Scenarios. In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC 2019), Auckland, New Zealand, 27–30 October 2019; pp. 3149–3154. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: New York, NY, USA, 2012; pp. 15–87. [Google Scholar]
- Liu, J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A Study on Model Fidelity for Model Predictive Control-Based Obstacle Avoidance in High-Speed Autonomous Ground Vehicles. Veh. Syst. Dyn. 2016, 54, 1629–1650. [Google Scholar] [CrossRef]
- Wang, W.; Liu, C.; Zhao, D. How Much Data are Enough? A Statistical Approach With Case Study on Longitudinal Driving Behavior. IEEE Trans. Intell. Veh. 2017, 2, 85–98. [Google Scholar] [CrossRef]
- Li, S.; Wang, J.; Li, K.; Lian, X.; Ukawa, H.; Bai, D. Modeling and Verification of Heavy-Duty Truck Drivers’ Car-Following Characteristics. Int. J. Autom. Technol. 2010, 11, 81–87. [Google Scholar] [CrossRef]
- Weiskircher, T.; Wang, Q.; Ayalew, B. Predictive Guidance and Control Framework for (Semi-) Autonomous Vehicles in Public Traffic. IEEE Trans. Control Syst. Technol. 2017, 25, 2034–2046. [Google Scholar] [CrossRef]
- CarSim Mechanical Simulation. Available online: http://www.carsim.com (accessed on 15 January 2017).
- Kirches, C.; Wirsching, L.; Bock, H.G.; Schlöder, J.P. Efficient Direct Multiple Shooting for Nonlinear Model Predictive Control on Long Horizons. J. Process Control 2012, 22, 540–550. [Google Scholar] [CrossRef]
- Rawlings, J.; Mayne, D.; Diehl, M. Model Predictive Control: Theory Computation and Design; Nob Hill Publishing: Madison, WI, USA, 2009; pp. 537–561. [Google Scholar]
- Duan, J.; Gao, F.; He, Y. Test Scenario Generation and Optimization Technology for Intelligent Driving Systems. IEEE Intell. Transp. Syst. Mag. 2020. [Google Scholar] [CrossRef]
- Diehl, M.; Findeisen, R.; Allgöwer, F.; Bock, H.G.; Schlöder, J.P. Nominal Stability of Real-Time Iteration Scheme for Nonlinear Model Predictive Control. IEEE Proc. Control Theory Appl. 2005, 152, 296–308. [Google Scholar]
- Andersson, J.; Akesson, J.; Diehl, M. CasADi: A Software Framework for Nonlinear Optimization and Optimal Control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Ferreau, H.J.; Kirches, C.; Potschka, A.H.; Bock, G.; Diehl, M. qpOASES: A Parametric Active-Set Algorithm for Quadratic Programming. Math. Program. Comput. 2014, 6, 327–363. [Google Scholar] [CrossRef]
- Li, S.E.; Gao, F.; Cao, D.; Li, K. Multiple-Model Switching Control of Vehicle Longitudinal Dynamics for Platoon-Level Automation. IEEE Trans. Veh. Technol. 2016, 65, 4480–4492. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| No. | Initial Speed | Desired Speed | Obstacle |
|---|---|---|---|
| 2 | 0 | OV1: , . | |
| 3 | OV1: , ; OV2: , . |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, D.; Gao, F.; Hu, Q. Motion Planning for Autonomous Vehicles Considering Longitudinal and Lateral Dynamics Coupling. Appl. Sci. 2020, 10, 3180. https://doi.org/10.3390/app10093180
Dang D, Gao F, Hu Q. Motion Planning for Autonomous Vehicles Considering Longitudinal and Lateral Dynamics Coupling. Applied Sciences. 2020; 10(9):3180. https://doi.org/10.3390/app10093180
Chicago/Turabian StyleDang, Dongfang, Feng Gao, and Qiuxia Hu. 2020. "Motion Planning for Autonomous Vehicles Considering Longitudinal and Lateral Dynamics Coupling" Applied Sciences 10, no. 9: 3180. https://doi.org/10.3390/app10093180
APA StyleDang, D., Gao, F., & Hu, Q. (2020). Motion Planning for Autonomous Vehicles Considering Longitudinal and Lateral Dynamics Coupling. Applied Sciences, 10(9), 3180. https://doi.org/10.3390/app10093180