1. Introduction
Modern technical structures are presently often constructed as fiber reinforced composites due to their low weight, high strength and superior fatigue behavior. Examples include aircraft structures, wind turbine blades, ship components and automotive structures. Structural health monitoring (SHM) systems have been researched for more than 20 years to improve safe operation, to reduce safety factors in the structural design and to avoid unnecessary maintenance tasks [
1]. Several techniques were proposed in the literature to detect damage in complex composite structures, including acoustic emission [
2], low-frequency vibrations [
3] and X-ray computed tomography [
4]. One promising SHM concept for thin-walled structures is based on ultrasonic guided waves (GW). Dienel et al. have shown that such an SHM system has the potential of saving 5% of the structural mass of a vertical tail plane [
5]. Applying this analysis to the whole aircraft fuel consumption could be reduced by roughly 1.8%.
The advantages of GW are the ability to propagate over long distances without substantial attenuation and their high sensitivity to stiffness changes within the structure because of damages. On the other hand, GW are dispersive and occur multimodally [
6,
7,
8,
9]. This makes signal analysis to detect damage challenging and a good understanding of the phenomenology of GW propagation is needed. Simulation models can help to establish this understanding and additionally support signal evaluation. For this purpose, however, these numerical models must be validated.
For the further development of GW-SHM systems an important challenge is the lack of public, freely and permanently available, high-quality and well-documented benchmark datasets. In particular, the measurements should be performed on specimens of different complexity in order to validate the wide range of numerical methods [
10] and signal processing methods. In recent years, such data sets with different focus were provided, e.g., by Moll et al. [
11,
12] and Marzani et al. [
13].
The central questions regarding the practical deployment of GW-based diagnostics are given (i) by the relative performance of existing and novel SHM methods, and (ii) by the performance relative to competing non-destructive testing (NDT) techniques. Here, the performance e.g., can be given in terms of damage detection sensitivity or localization accuracy. These questions should ideally be tackled by using an open dataset, because there exist significant differences in the published modelling procedures or the manner in which experiments were conducted.
Due to this variability, a fair assessment of performance results is not feasible. This article presents an amendment to the Open Guided Waves (OGW,
www.openguidedwaves.de) online platform whose datasets might be considered to be a reference standard. Through OGW existing algorithms for signal analysis used in SHM and GW field processing can be compared without uncertainties because of varying measurement equipment or different transducer technologies. Also the platform can serve engineers or researchers with appealing ideas but without access to expensive instrumentation. This potentially will lead to a stronger transdisciplinary cooperation between the scientific and technical fields in order to promote GW-based SHM technology.
The OGW platform aims to provide relevant data sets for GW-based SHM of thin-walled structures. In previous works, benchmark measurements were recorded on the so-called
wave field plate with one piezoelectric transducer placed in the center [
11]. A 3D scanning laser Doppler vibrometer (SLDV) recorded the acoustic wave field on a spatial grid of measurement points. In addition, measurements from the
SHM plate were taken based on an array of twelve piezoelectric transducers, see [
11,
12]. Both plates were made of carbon fibre reinforced plastics (CFRP). Generally, fiber composites have typically anisotropic material properties which affect the group velocity of GW. Because the measurement setup was motivated by an aircraft-related structural element a typical quasi-isotropic material was used for both plates. Therefore, no significant direction dependency for the group velocity was measured. Li et al. [
14] show that anisotropic effects are very pronounced for uni-directional and cross ply laminates. As in [
15] it is shown by Wang et al., that for quasi-isotropic layups and frequencies below the higher order GW modes, the group velocity is approximately direction-independent.
In contrast to the previous datasets, an omega stringer was attached to both plates for representative aircraft components. The plates are again made of quasi-isotropic material, so that no anisotropic effects occur. Since measurements from the flat structure and the structure with the stringer are available, it is possible to analyse the scattering behaviour of guided waves at the stringer. For excitation a conventional narrowband toneburst, so as to reduce the impact of frequency dispersion similar to [
16,
17], and a broadband chirp signal was used as presented in [
18,
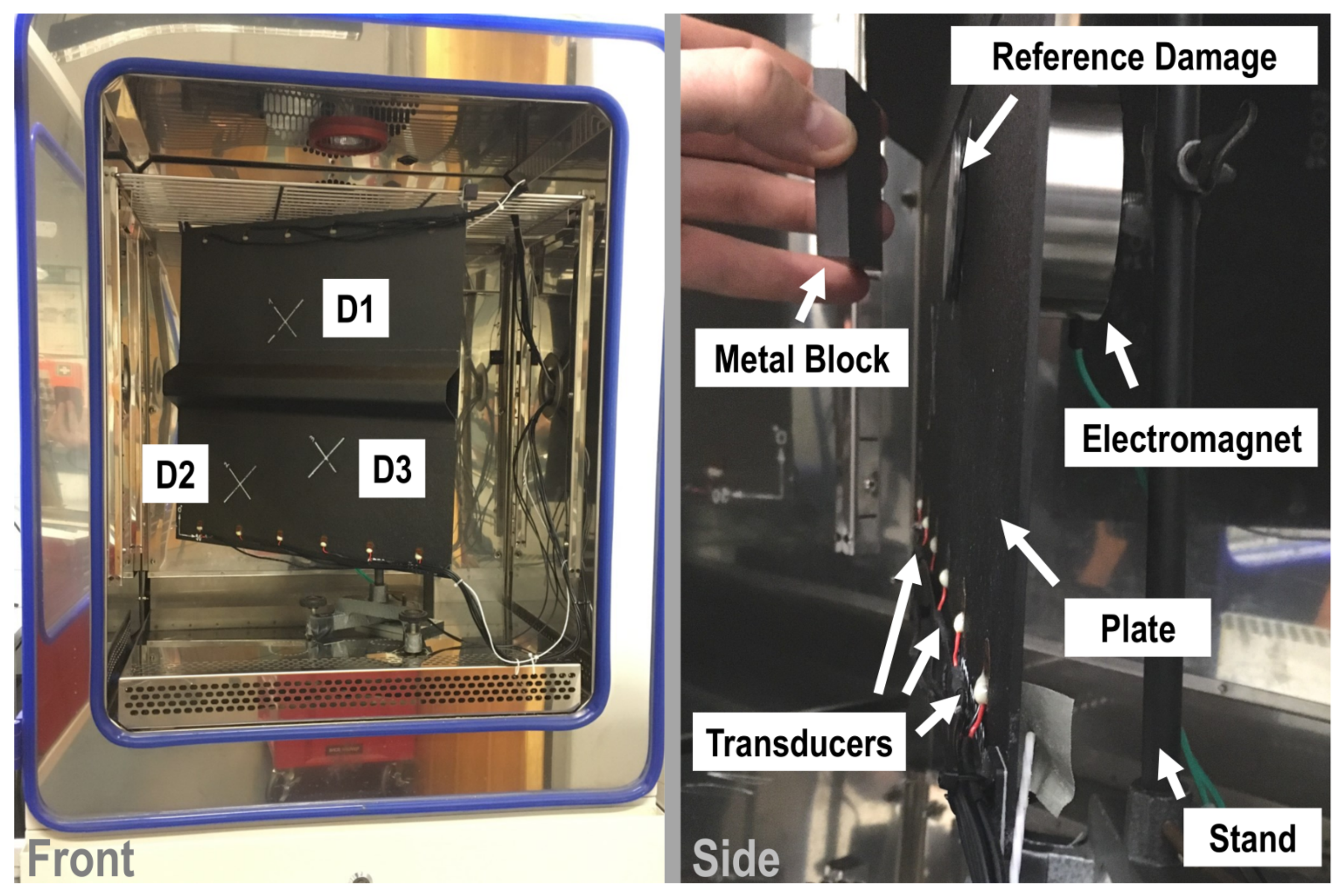
19]. Since GW-based SHM tests are limited by the high instrumentation effort and enormous costs, we have studied a reversible reference damage that could be attached to the plates surface [
20,
21]. A representative damage is used, which is easy to model in numerical simulation and experiment. The representative damage is necessary to evaluate SHM systems in a standardized way. It should be able to represent the key features of the damage (size, interaction with the excited GW-modes and stiffness change). For this purpose, an elliptically shaped damage was chosen. Its size is motivated by the projected surface of real impacts. The reference damage has been placed at different locations on the structure in order to study spatially distributed probability of detection (POD) of GW-based SHM-systems [
22].
The goal of the paper is to provide
measurements supporting current state-of-the-art GW-based SHM research for model-based POD [
23,
24,
25,
26,
27],
a dataset with multiple damage sizes for model validation,
a finite shell element-based model as starting point for numerical model validation.
The remainder of the paper is organized in the following way:
Section 2 presents the CFRP (carbon fiber reinforced plastics) structures with stringers as well as the elliptical reference damage model. After that,
Section 3 introduces the experimental setup for the
SHM plate and the
wave field plate with stringer element. Results derived from those measurements are presented in
Section 4.
Section 5 gives an overview of the modeling approach and some results for comparison. Finally, conclusions are drawn at the end.
5. Finite Element Reference Model
For analysis purposes, a simplified finite element shell model of the
SHM-plate was created. As Kudela and Ostachowicz showed, shell elements are valid for the frequency domain (under the first cut off frequency) considered in this analysis [
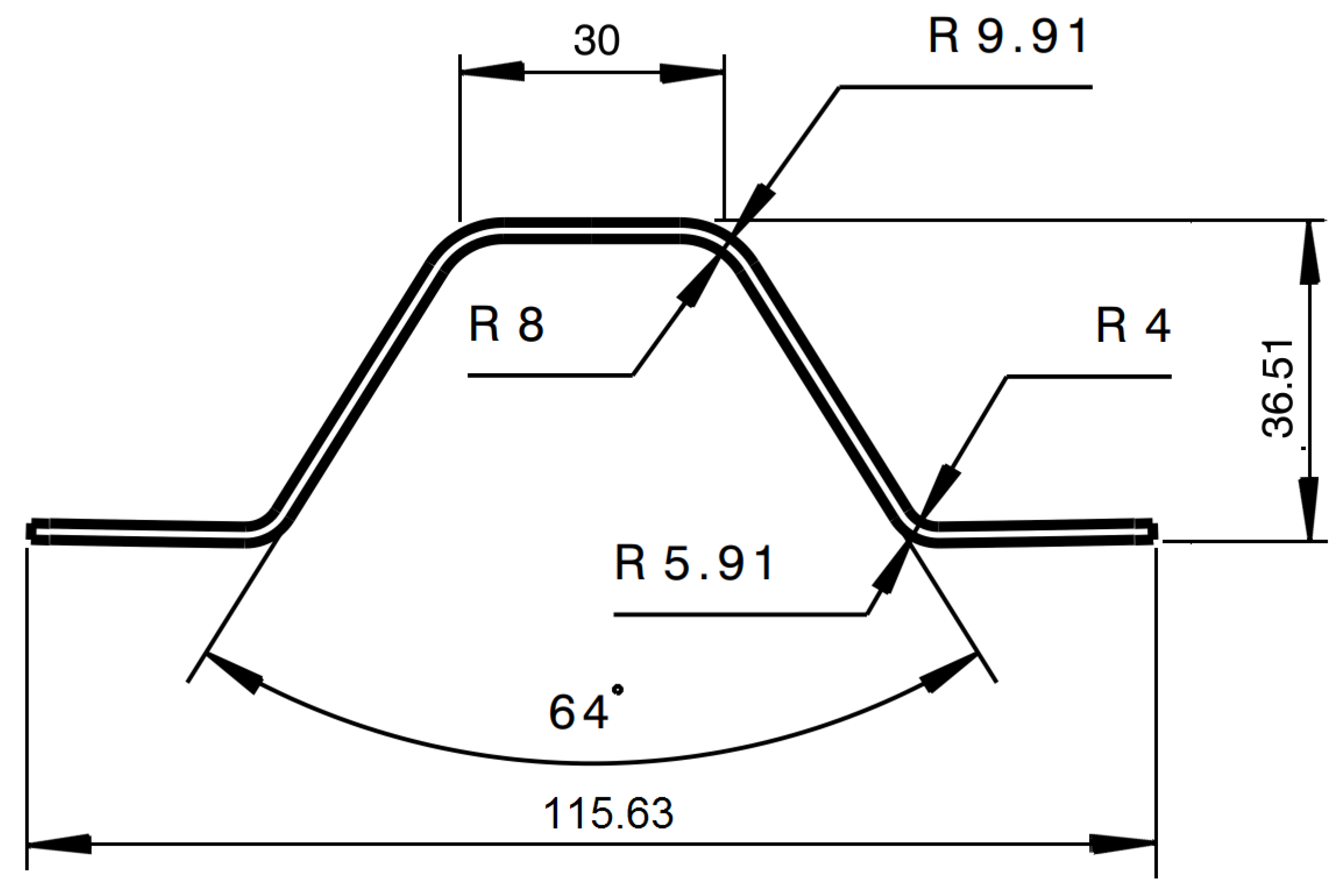
40]. The geometries of plate and stringer are given in
Figure 3a and
Figure 1. The material properties of a single layer are given in
Table 1 and the layups are illustrated in
Section 2.1. In
Figure 16 the finite element model created in Abaqus is shown. The detailed modeling can be checked within the provided finite element model mesh (available online).
The transducers in the model are nodes at the center position of the real piezoceramics and used for actuation and sensing. For excitation, the amplitude signal in Equation (
1) is applied as a force perpendicular to the plate surface. For each damage size D
1 a separate mesh is created and analysed. As time integration scheme the explicit solver without any non-linearity was used.
In this first study, the simulation tries to reproduce the trend curves of
Figure 11 using Equation (
2). The damage D
1 curve is shown in
Figure 17. The result looks promising if the time signal analysis is done in an interval between 0–500 μs. This value was chosen, because the measured signal is more or less damped at this stage for 260 kHz, cf.
Figure 9.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}