1. Introduction
In recent years, with the development of new energy generation technologies, more and more photovoltaic grid-connected inverters are being connected to the power grid, making the modeling and stability of new power grids a hot research subject [
1,
2,
3]. Converting a photovoltaic array into an equivalent variable voltage source greatly simplifies the modeling, control strategy, and stability analysis of photovoltaic grid-connected inverters [
4] and especially reduces the computation costs for small-world network models [
5]. Similarly, by simplifying the H-bridge switch circuit appropriately and then establishing an equivalent model, the analysis, controller design, and numerical simulation of multi-paralleled grid-connected inverters are greatly simplified [
6]. A photovoltaic array is a typical nonlinear device that may have a great impact on the accuracy of a photovoltaic grid-connected inverter model after simplification. With the rapid increase in the computing capabilities of modern microprocessors, researchers are increasingly exploring nonlinear models to improve the accuracy of system models. Nonlinear models of photovoltaic arrays can allow for analysis of the nonlinear characteristics of the system, thus providing more accurate modeling for photovoltaic grid-connected inverter [
7,
8,
9].
An inverter circuit contains power switching devices, which are strongly nonlinear systems. Establishing a piecewise smooth model can better reveal the inherent physical characteristics of the system, such as bifurcation and chaos [
10,
11,
12,
13]. Since the 1980s, the nonlinear dynamic behaviors of power electronics systems have been widely studied, including the bifurcation and chaotic behaviors of DC/DC converters [
14,
15,
16], DC/AC converters [
11,
13,
17], and motor systems [
18,
19]. Studies have shown that the bifurcation and chaotic behaviors are closely related to the control and stability of power electronic systems, the bifurcation behavior of multi-inverter microgrids has an inherent relationship with system stability [
20,
21], and chaos control in power electronics systems is crucial for system stability [
22,
23]. With the continuous increase of the number of distributed photovoltaic grid-connected inverters, accurate system modeling, control, and stability analysis are becoming more and more important. Only by comprehensively considering the nonlinear characteristics of photovoltaic arrays and the switching characteristics of inverter circuits can accurate models of photovoltaic grid-connected inverters be established.
The main work of this paper is to establish a nonlinear model for photovoltaic grid-connected inverters and solve its predictive controller, study the nonlinear dynamic behavior of photovoltaic grid-connected inverters using methods including time-domain waveforms, phase diagrams, folded diagrams, and bifurcation diagrams, and finally explore how to select control parameters using nonlinear dynamic behavior characteristics such as bifurcation and chaos. The work of this paper may serve as a valuable reference in the modeling, optimization control, and stability analysis of large-scale distributed new energy grid-connected power generation systems.
2. Circuit Structure and Operational Principle of Photovoltaic Grid-Connected Inverter
A single-phase full-bridge photovoltaic (PV) grid-connected inverter is a typical circuit structure of photovoltaic grid-connected inverters. In single-phase PV grid-connected inverter, there are two typical structures, namely single-stage structure, and two-stage structure. The two-stage structure is to add a DC/DC converter in front of the DC/AC converter, which enables MPPT (Maximum Power Point Tracking) to be carried out in the DC/DC converter. For a single-stage structure, MPPT is placed in DC/AC. From the control point of view, the two-stage structure can be separated from the grid-connected control and MPPT control, which is more convenient for control, but low conversion efficiency. In the single-stage structure, the grid-connected control and MPPT control are integrated. Although the control is relatively complex, it can be easily realized at present. The single-stage structure is relatively simple, which helps improve efficiency. To express this more simply, in this paper, we use a single-stage structure for analysis.
The circuit, as shown in
Figure 1, consists of a power block, an isolation block, and a control block. In the power block, the PV array and the capacitor
constitute the power input source;
constitute the full-bridge circuit;
,
, and
constitute the LCL output filter;
is the equivalent resistance of the circuit conductor wires; and
is the signal of the public power grid. In
Figure 1,
and
are the output current and output voltage of the PV array, respectively;
and
are the voltage and charging/discharging currents across the capacitor
, respectively;
;
and
are the currents across the filter inductors
and
, respectively; and
and
are the voltages across the capacitor
and the charge/discharge currents, respectively.
The voltage sensors 1 and 2 and current sensors 1 and 2 of the isolation block acquire the signals (i.e., ), , , and , respectively, and send them to the A/D samplings of the control block to obtain the corresponding digital signals , , , and . The PWM (Pulse Width Modulation) isolation driver is responsible for isolating the PWM generator of the control block and amplifying its signals for driving the power switches .
In the control block, the predictive control algorithm calculates the duty ratio of the PWM signal based on the digital signals , , , and .
Whether unipolar polarity SPWM (Sinusoidal Pulse Width Modulation) or bipolar SPWM is used, the inverter can be effectively controlled. The principle of unipolar polarity SPWM and bipolar polarity SPWM are shown in
Figure 2a,b, respectively. As shown in
Figure 2, unipolar SPWM has more switch state combinations than bipolar SPWM. Both unipolar SPWM and bipolar SPWM can effectively control the inverter. To make the logic expression more concise, bipolar SPWM is used in the analysis of this paper. According to the bipolar SPWM principle, a Boolean logic variable
is defined as
, and then the switching logic of the power switches
is expressed as follows:
,
, where
where the integer
refers to the starting point of the
th switching cycle,
represents the switching period of the inverter, and
represents the duty ratio of the
th switching cycle. The circuit system shown in
Figure 1 has a non-linear characteristic because of the photovoltaic array as the power input. Driven by the switching signal
, the circuit switches between two subsystems. This is a typical switched nonlinear system.
3. Nonlinear Dynamic Model of Photovoltaic Grid-Connected Inverter
PV arrays have the characteristics of nonlinear output, wide range of voltage and current fluctuations, and are susceptible to environmental influences. Therefore, when modeling photovoltaic grid-connected inverters, PV arrays affect the accuracy of photovoltaic grid-connected inverter models. Using the mathematical model of the PV module [
8] and denoting the number of PV modules in the PV array in series and in parallel as
and
, respectively, the mathematical model of the PV array is composed of the two following equations:
where
is the photocurrent,
is the saturation current,
is the number of series units inside the module,
is the module temperature,
is the diode ideality factor,
is the shunt resistance, and
,
,
, and
are polynomial fitting coefficients. These parameters can be calculated from the specification parameters provided by the module manufacturer. Also in Equation (3),
the quantity of elementary charge is (
), and
is the Boltzmann constant (
). The PV array model is shown in
Figure 3.
Now we consider the two switching states,
of the circuit in
Figure 1 and establish the state equation of the photovoltaic grid-connected inverter, using
,
,
, and
as the state variables. In the switch state
, the switching combination of the power switches
yields
. The KCL (Kirchoff’s Current Law) equations on the nodes
and
are derived. The KVL (Kirchhoff’s Voltage Law) equations are derived on the
→
→
→
loop and on the
→
→
→
→
loop. Similarly, when
, the switching combination of the power switches
yields
, and the same KCL and KVL equations are derived. The nonlinear mathematical model of the photovoltaic grid-connected inverter is finally obtained:
where and
, where
represents the angular frequency (rad/s) of the power grid signal.
To reflect the influence of PLL on the model, it is necessary to introduce the power grid frequency
into the model as a parameter of the model. The power grid voltage signal
cannot be a fixed sine wave signal, but a state variable. Therefore, we need to build an intermediate variable
, which has the following relationship with the grid signal
:
The angle frequency
is obtained by PLL. In the process of solving the equation, the integration of
will get the phase angle. Therefore, after considering the PLL unit, the equation of PV grid-connected inverter is as follows:
5. Discussion
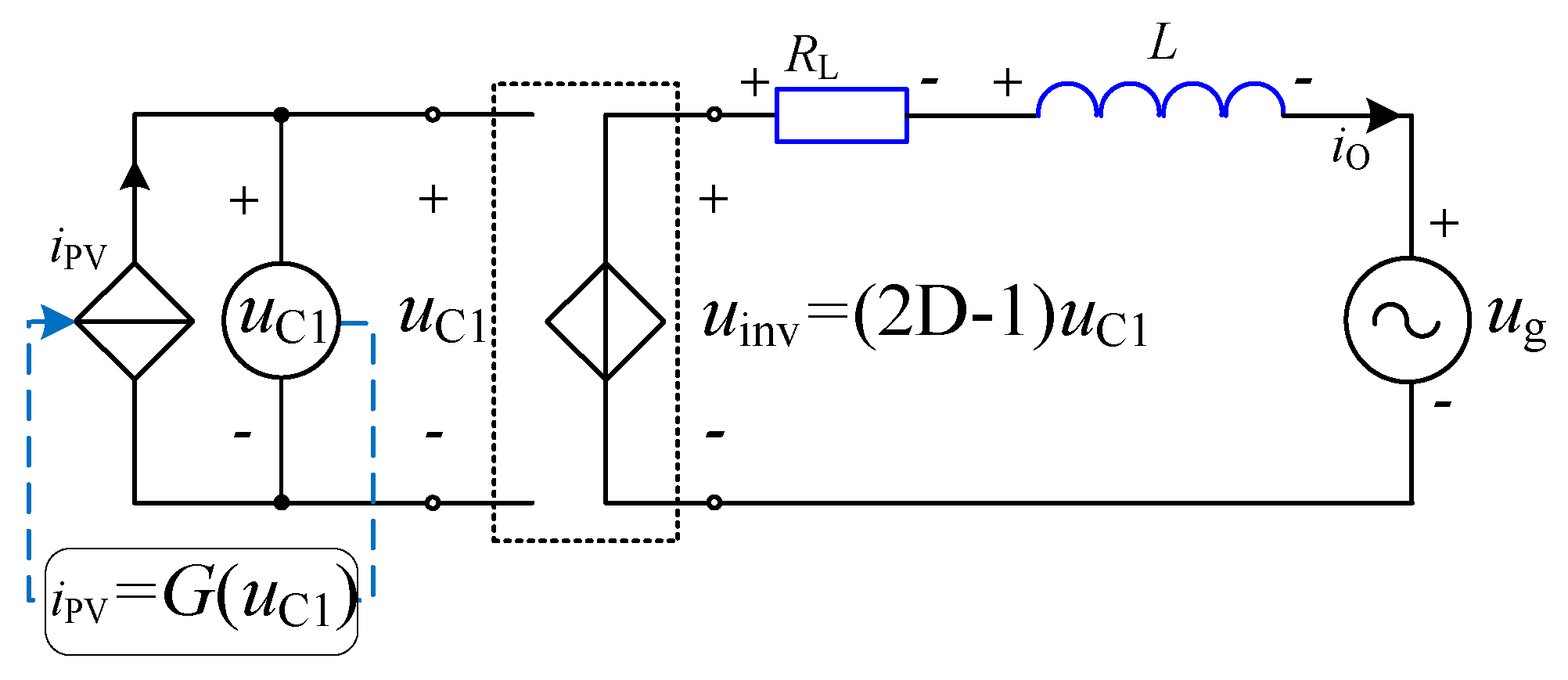
The output of the photovoltaic array has strongly nonlinear characteristics. The inverter circuit contains power switching devices, which is also a typical strongly nonlinear circuit. Therefore, the photovoltaic grid-connected inverter model, Equation (6), is a nonlinear model. The accuracy of the model is very important for the optimal design of the controller and the stability analysis of the system.
Figure 6 and
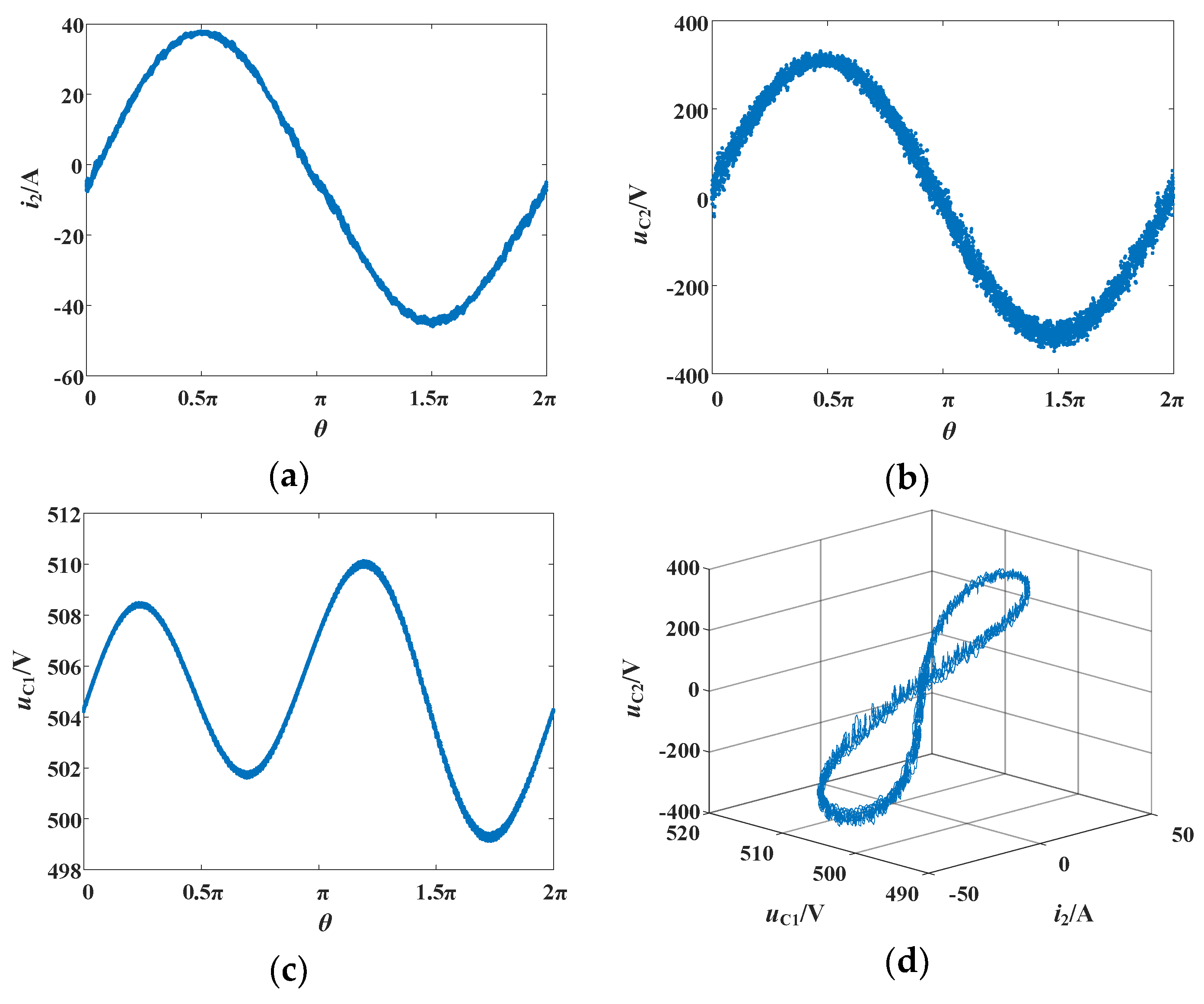
Figure 7 provide analyses of the fast-scale bifurcations of photovoltaic grid-connected inverters with folded diagrams. They show that at certain parameter values, the system is in quasiperiodic and chaotic motion states. Fast-scale bifurcation analysis can be used to understand the dynamic behavior of each phase of the system state variable in the entire power frequency cycle with specific parameters for photovoltaic grid-connected inverters.
Figure 8 and
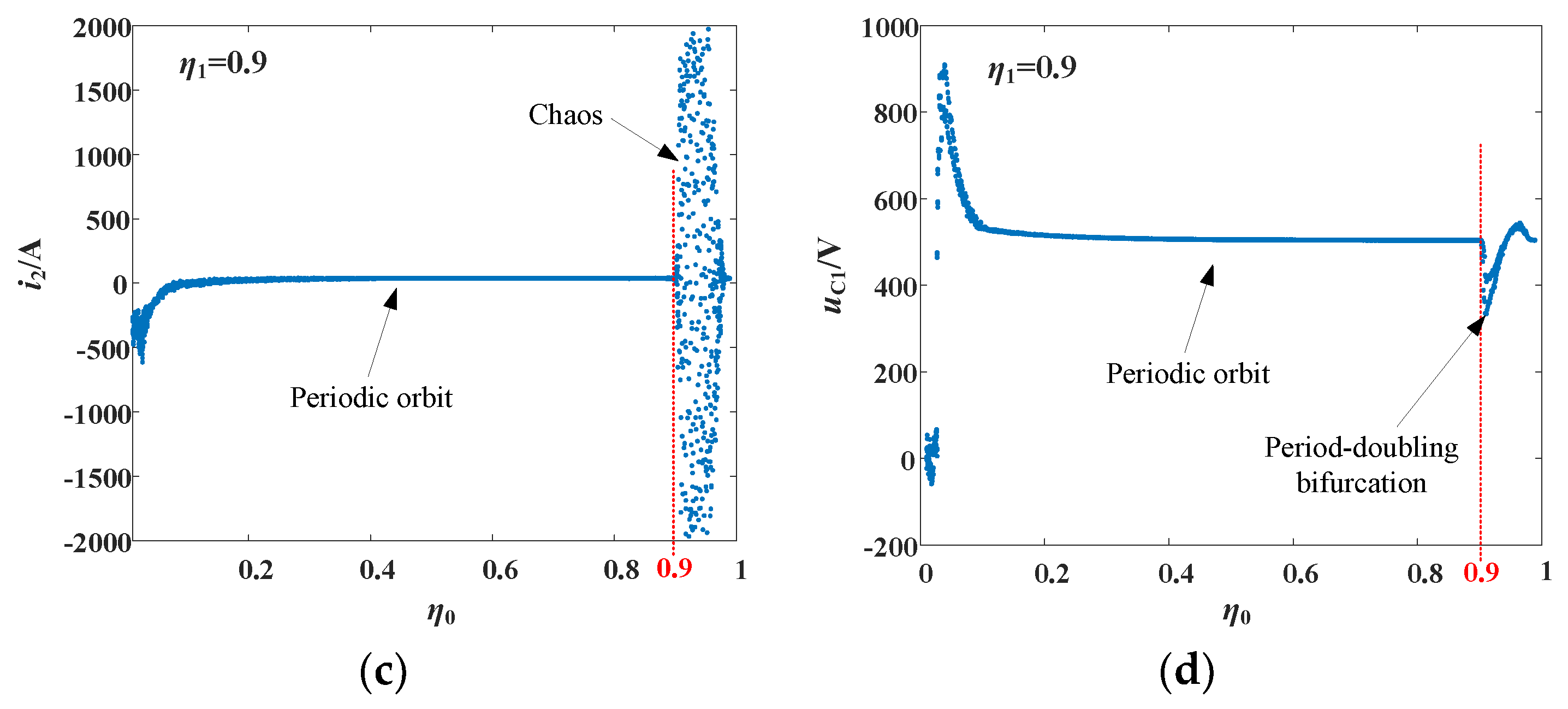
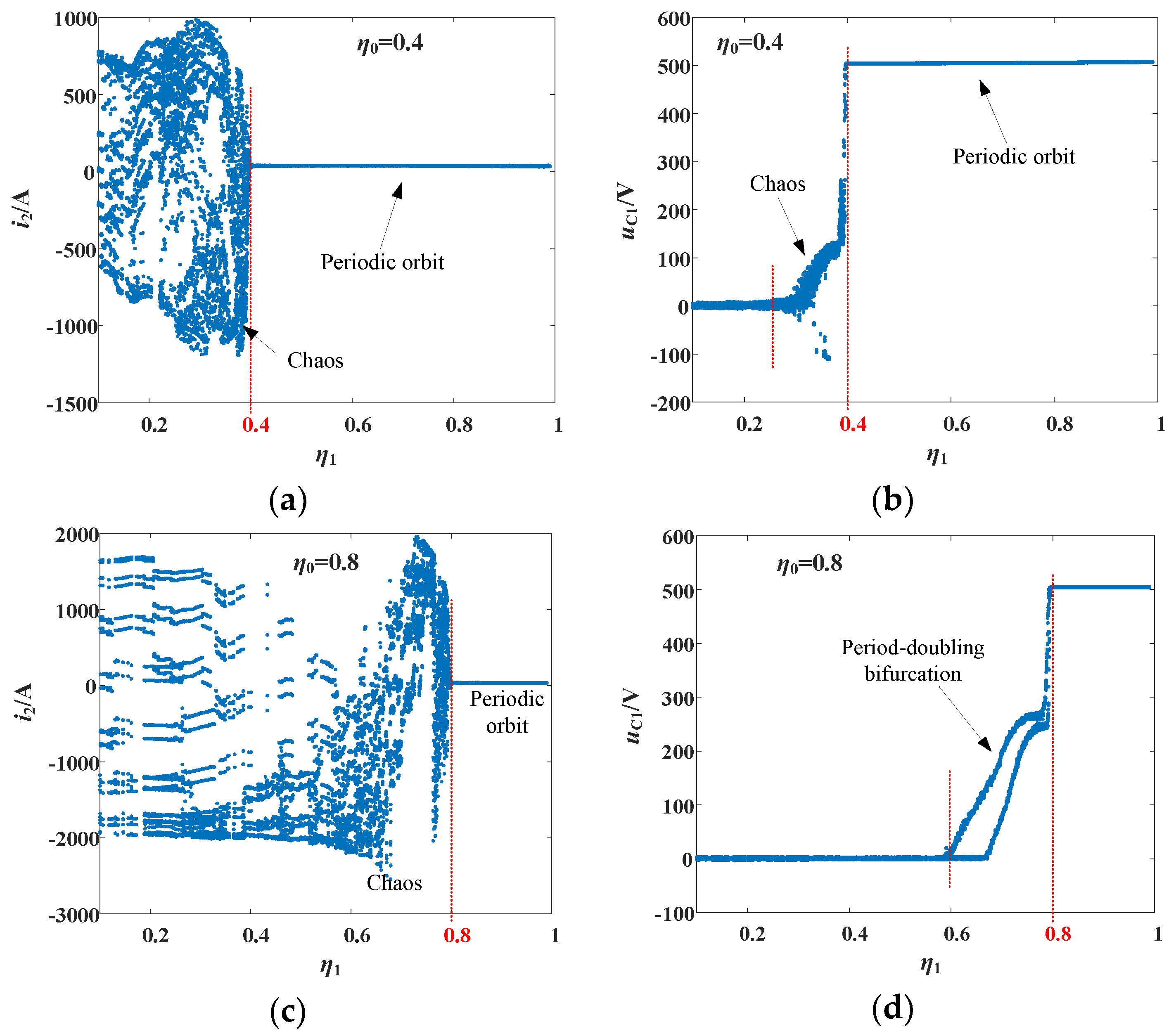
Figure 9 show the bifurcation and chaos phenomena of the system using slow-scale bifurcation diagrams. It shows that as the control parameters change, the system switches between periodic, bifurcation, and chaotic motion states. The analysis of slow-scale bifurcation can be used to understand the influence of the changes in control parameters on the nonlinear dynamic behavior of the system, and it can also be used as a design guide for control parameters.
Figure 8 and
Figure 9 indicate that when using
as the bifurcation parameter, the value of
affects the size of the chaotic motion window of the system. Therefore, in order to fully understand the influence of control parameters on the nonlinear dynamic behavior of the system, a three-dimensional bifurcation diagram, as shown in
Figure 10, is constructed using
and
as the bifurcation parameters. The top view of the three-dimensional bifurcation diagram as shown in
Figure 10b clearly shows the parameter area corresponding to the chaotic motion and periodic motion of the system. This servers as the guidance for selection of control parameters.
When designing a controller, the control parameters
and
should be selected from the area of the periodic orbits shown in
Figure 10b to ensure that the system is in a periodic motion state. In the design, the parameter values can be further optimized according to the objectives. Taking the reduction of the total harmonic distortion (THD) of the output current as an example, just take the parameter corresponding to the minimum value of THD from the output current THDs of the inverter calculated in the area of the periodic orbits shown in
Figure 10b. A specific case is as follows.
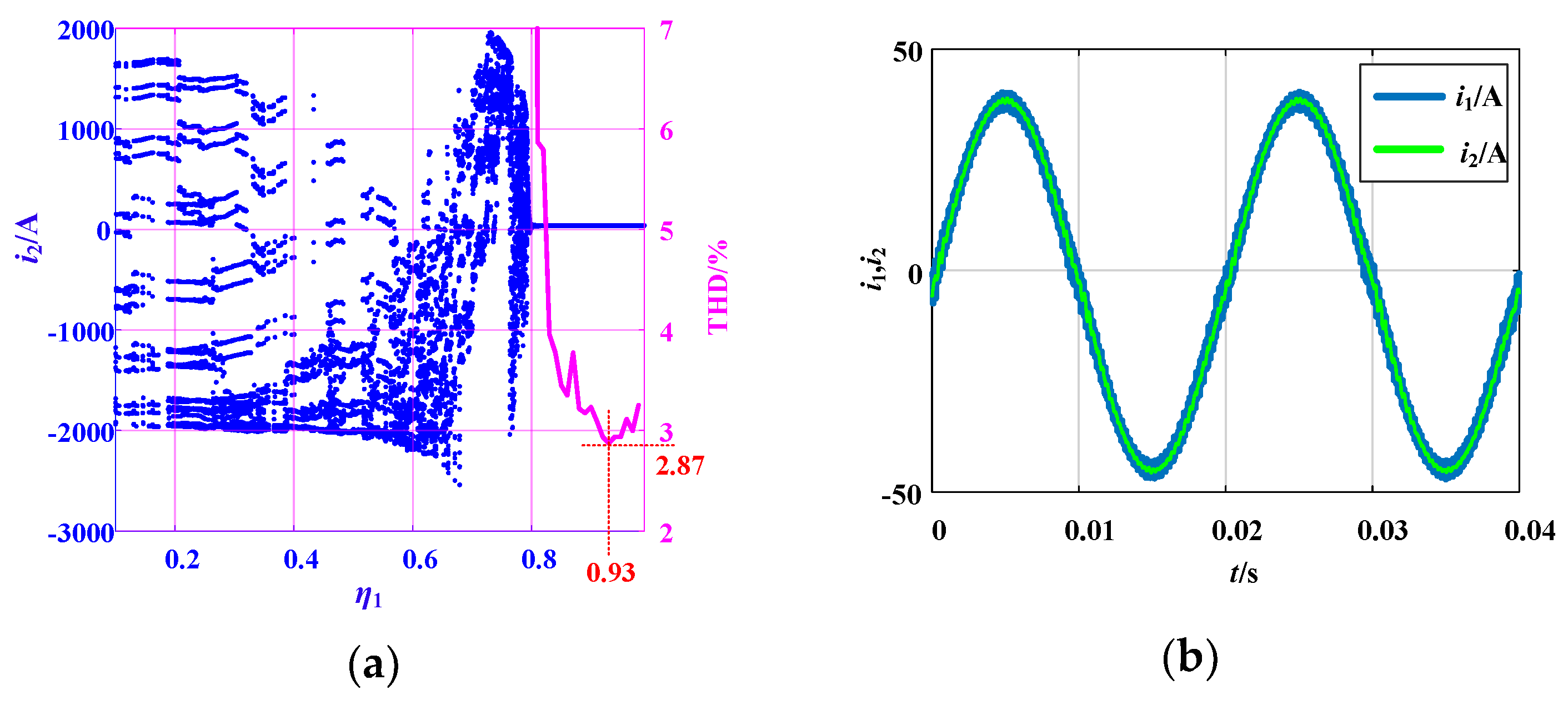
Figure 11a shows the method of parameter selection through the bifurcation diagram and the total harmonic distortion. Let
=0.8 and
be the bifurcation parameters; for example, when
is in the range of 0.8–1.0, the system is in the periodic motion state. In the region of this periodic motion, the total harmonic distortion of the output current
of the photovoltaic grid-connected inverter is calculated for each parameter value. The purple curve in
Figure 11a shows that when the control parameter
is 0.93, the total harmonic distortion of
, at 2.87%, is at its lowest. Accordingly, the control parameters are selected as
and
, and the time-domain waveform of the output current
from the photovoltaic grid-connected inverter is shown in
Figure 11b. Based on the control parameters selected in this example, a 1kW experimental prototype is used to verify the effectiveness of the controller, as shown in
Figure 12. The parameters of the experimental prototype are shown in
Table 2. The experimental results show that the output current of the inverter can track the voltage signal of the power grid well without obvious distortion. Take out the current signal and put it into Matlab (R2019a)/Simulink to calculate its THD, which is 2.95%.
PV grid-connected inverter contains switching devices, which is a typical strong non-linear system. The existing research shows that the PV grid-connected inverter will appear bifurcation and chaos in a certain range of parameters. The non-linear dynamics of PV grid-connected inverter can be studied on two-time scales (switching frequency and grid line frequency) by fast and slow-scale bifurcations. When the system begins to bifurcate from periodic motion and then enters into chaos, it means that the system has begun to deteriorate and become unstable. These dynamic behaviors are related to system parameters, which include electronic component parameters and control parameters. The study of the relationship between the device and control parameters and the non-linear dynamic behavior can reveal the dynamic behavior of the PV grid-connected inverter, guide the developers to choose the correct parameter range, and guide the controller design. The study of non-linear dynamic behavior can lead a perspective to study the design and stability of PV grid-connected inverter, which is complementary to the classical linear control theory, and provides analysis methods and tools for the design of PV grid-connected inverter.
6. Conclusions
A photovoltaic grid-connected inverter is a strongly nonlinear system, so it is of great significance to establish its nonlinear model for analysis. To improve the modeling accuracy, in this study we have comprehensively considered the nonlinear characteristics of photovoltaic arrays and the strongly nonlinear characteristics of switching circuits, established a nonlinear model of photovoltaic grid-connected inverters, and solved its predictive controller. We have analyzed the model by using folded diagrams, phase diagrams, and bifurcation diagrams. We have studied the nonlinear dynamic behavior of photovoltaic grid-connected inverters under predictive control on both fast and slow scales. Our studies have shown that bifurcation and chaotic behaviors exist in photovoltaic grid-connected inverters under a certain range of control parameters. By analyzing the inherent relationship between the control parameters and the nonlinear dynamic behavior characteristics, we can select and optimize the control parameters in the design of grid-connected inverters. Based on this work, future studies can further explore random fluctuations of the power grids, local loads, photovoltaic arrays under the influence of the environment, and the network structure characteristics of the new smart grid, thus yielding additional insights into the stability and interaction mechanisms of photovoltaic grid-connected inverters and power grids.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}